
Optimal Allocation and Operation of Droop-Controlled Islanded Microgrids: A Review



Abstract
:1. Introduction
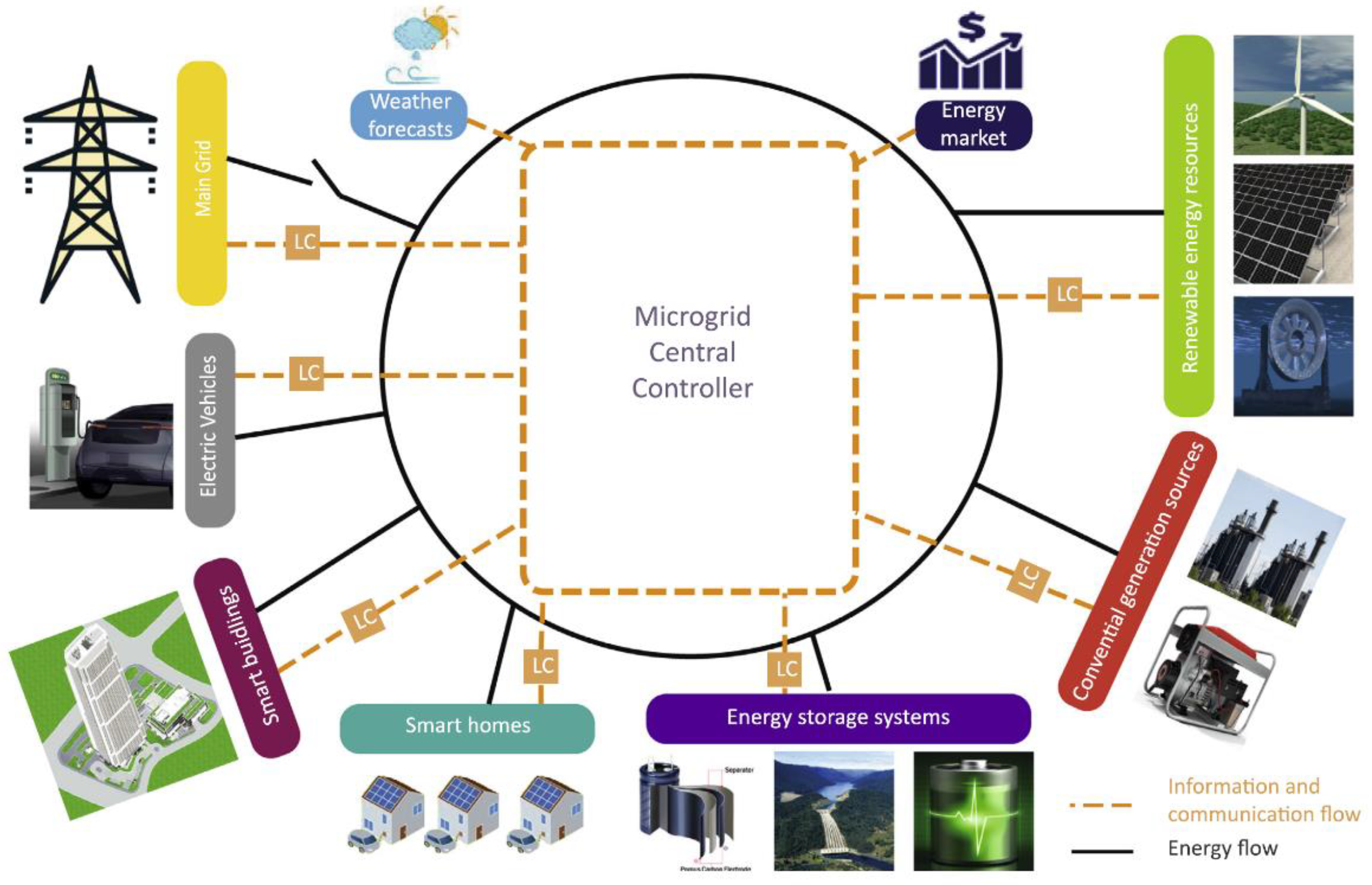
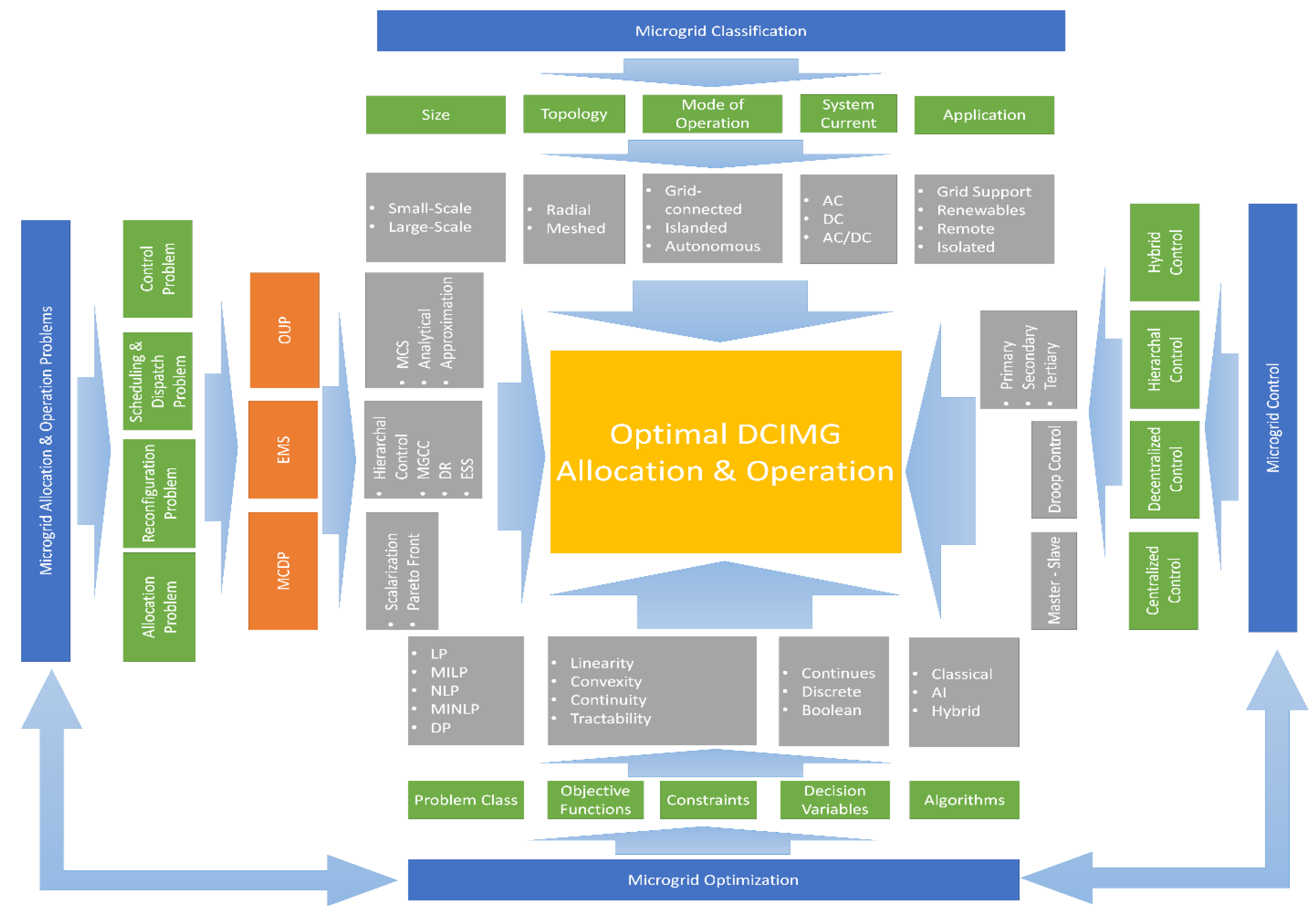
2. Microgrid Overview
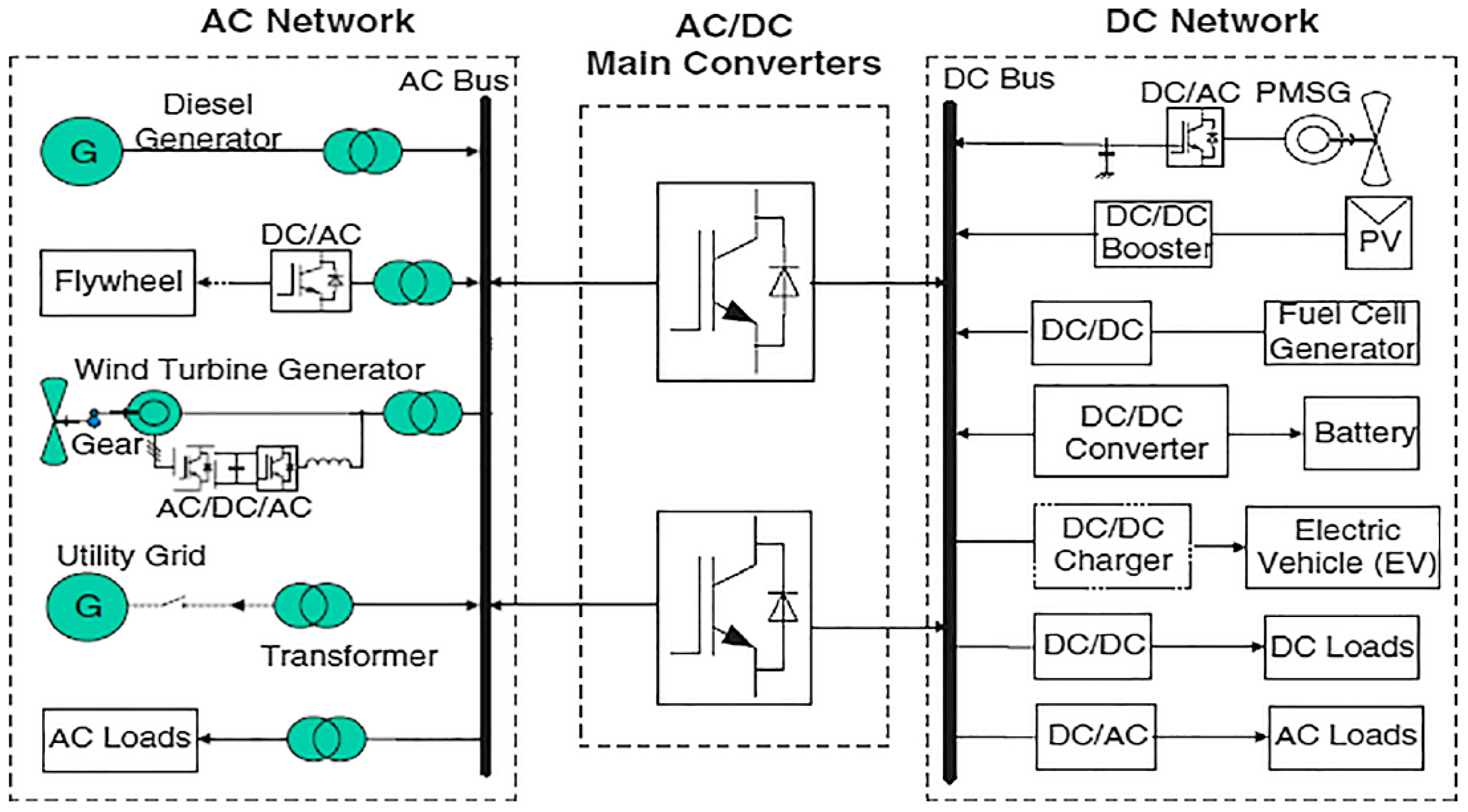
2.1. Microgrid Classification and Structure
2.1.1. AC Microgrid
2.1.2. DC Microgrid
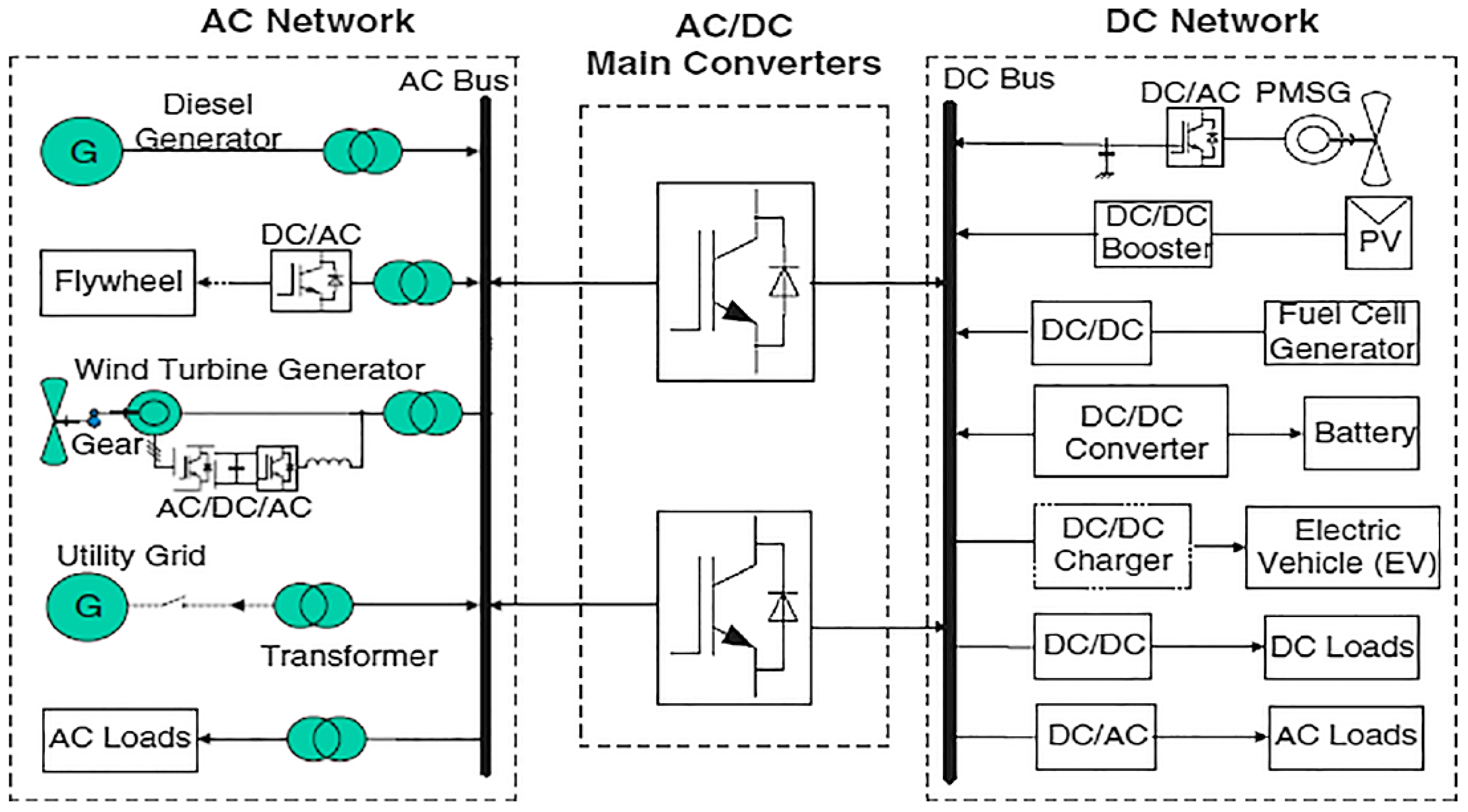
2.1.3. AC/DC Microgrid
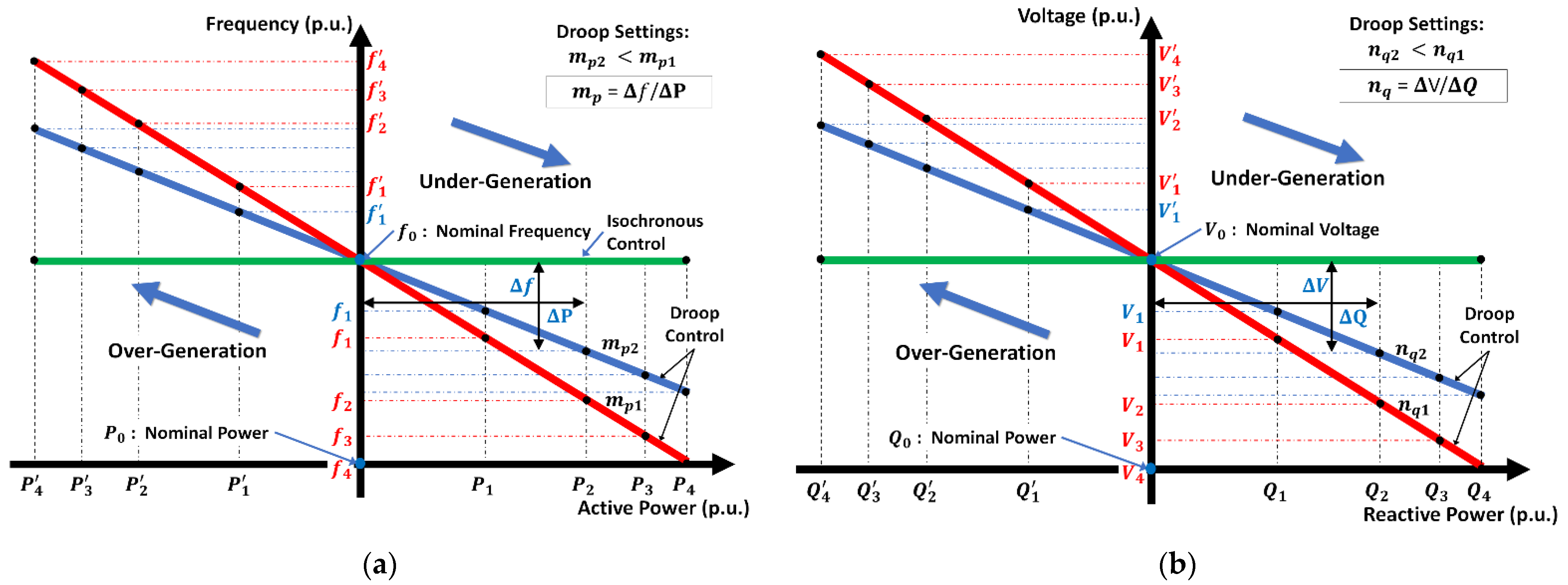
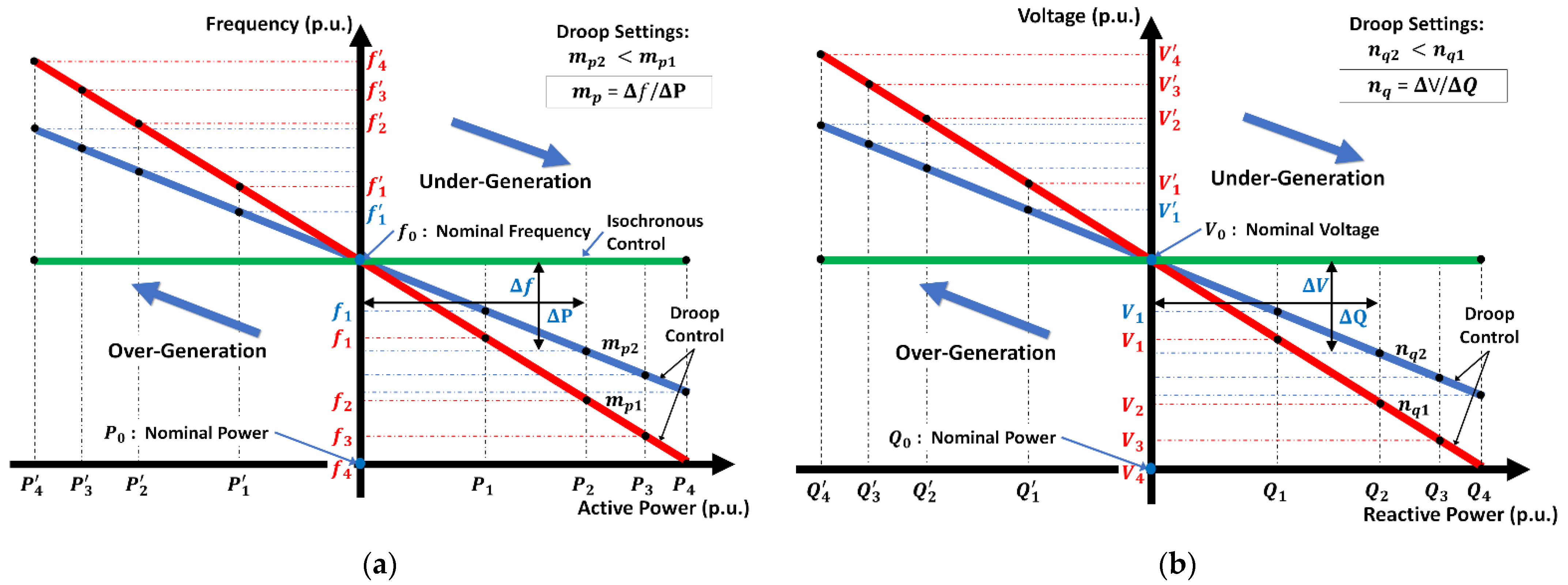
2.2. Microgrid Droop Control Philosophy
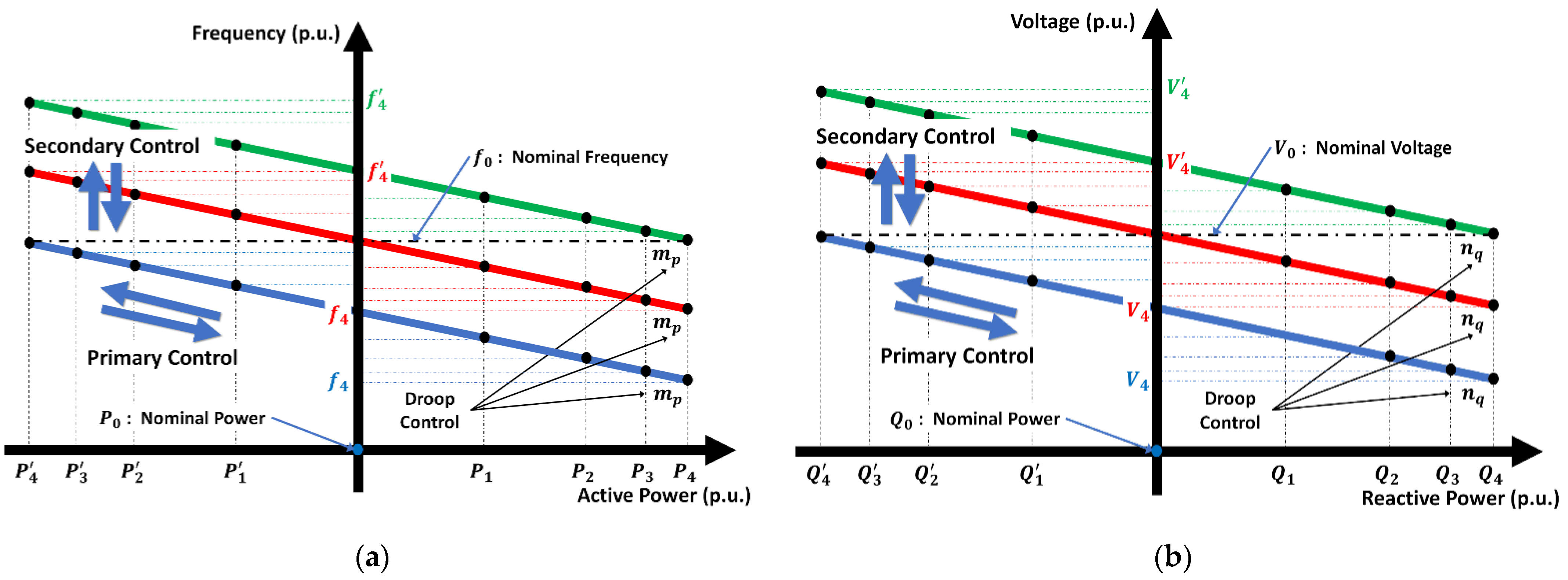
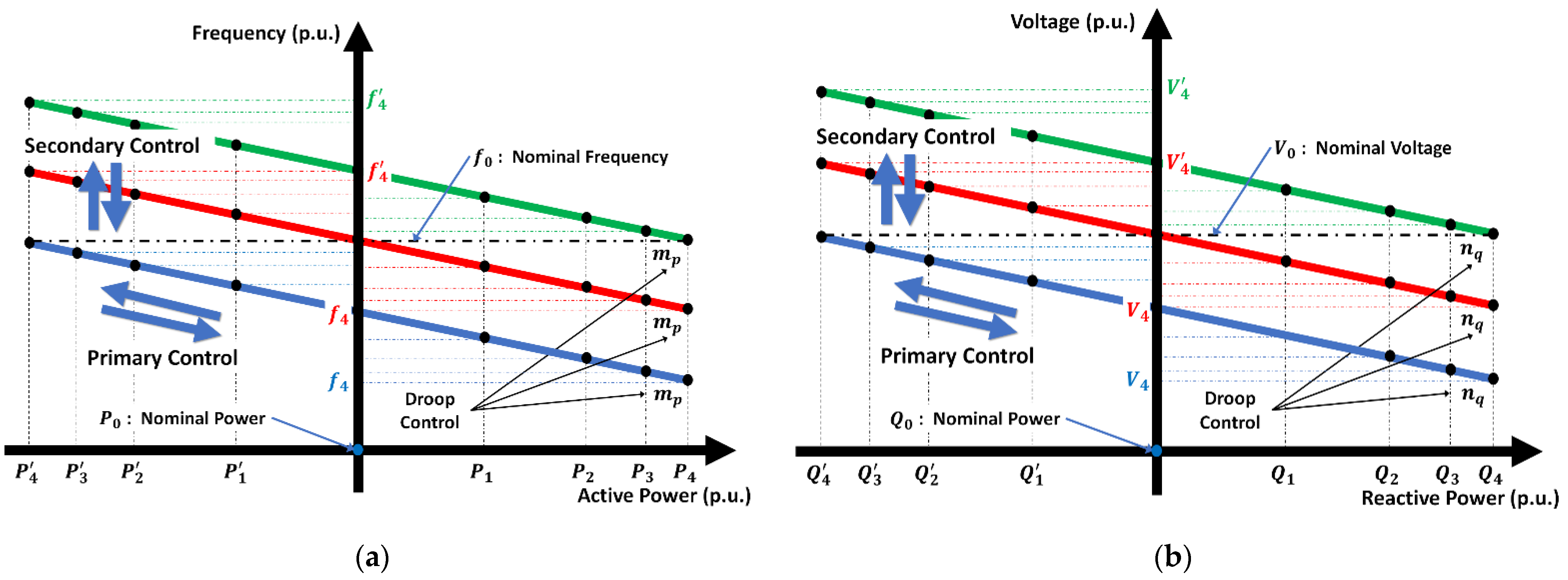
2.2.1. Primary Control
2.2.2. Secondary Control
2.2.3. Tertiary Control
2.3. Microgrid Optimization Problems
2.3.1. Allocation Problem
2.3.2. Reconfiguration Problem
2.3.3. Scheduling and Dispatch Problem
2.3.4. Control and EMS Problem
2.3.5. Multi-Criteria Decision Problem
2.3.6. Optimization with Uncertainty Problem
3. Optimization in Microgrids
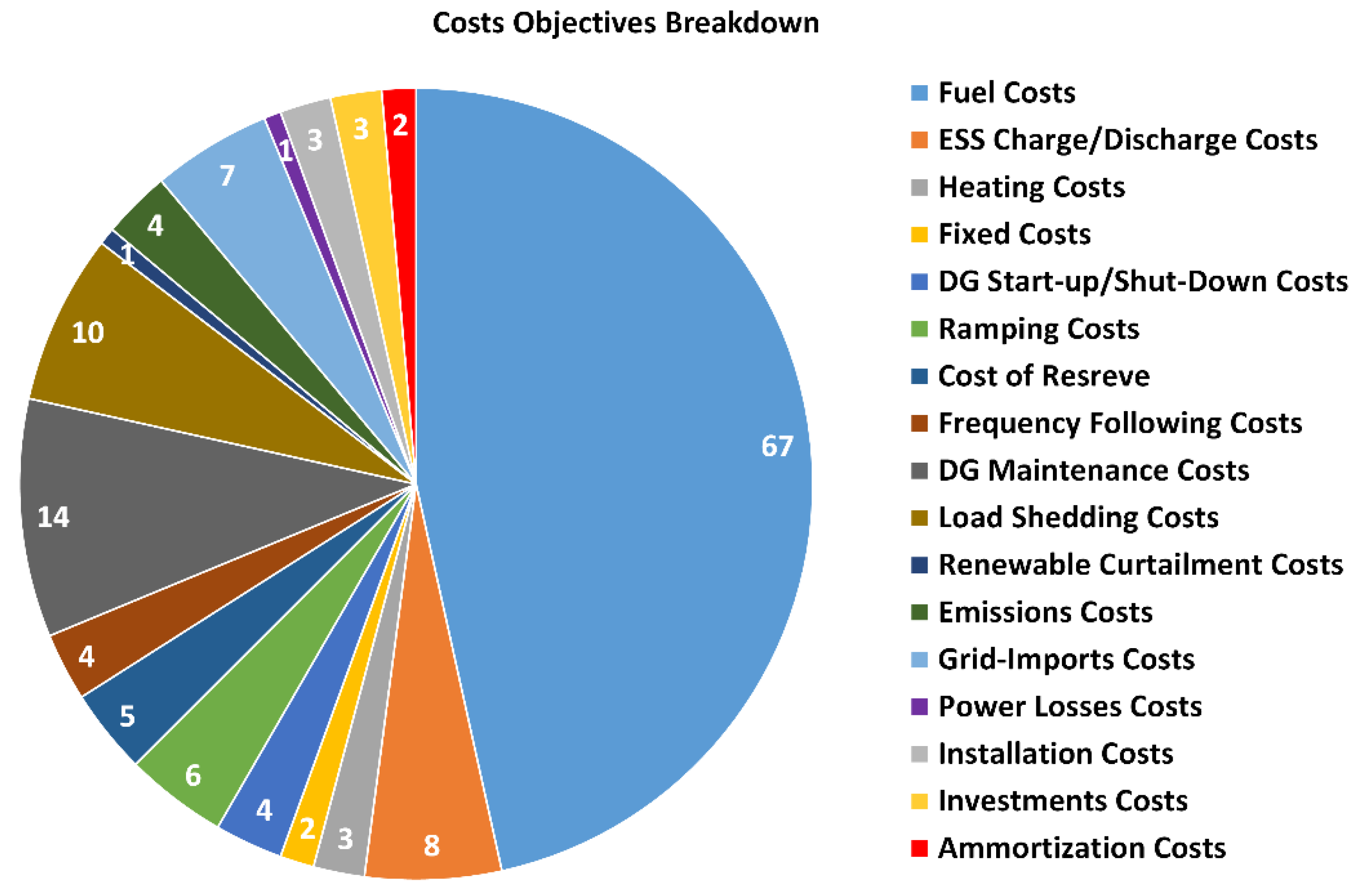
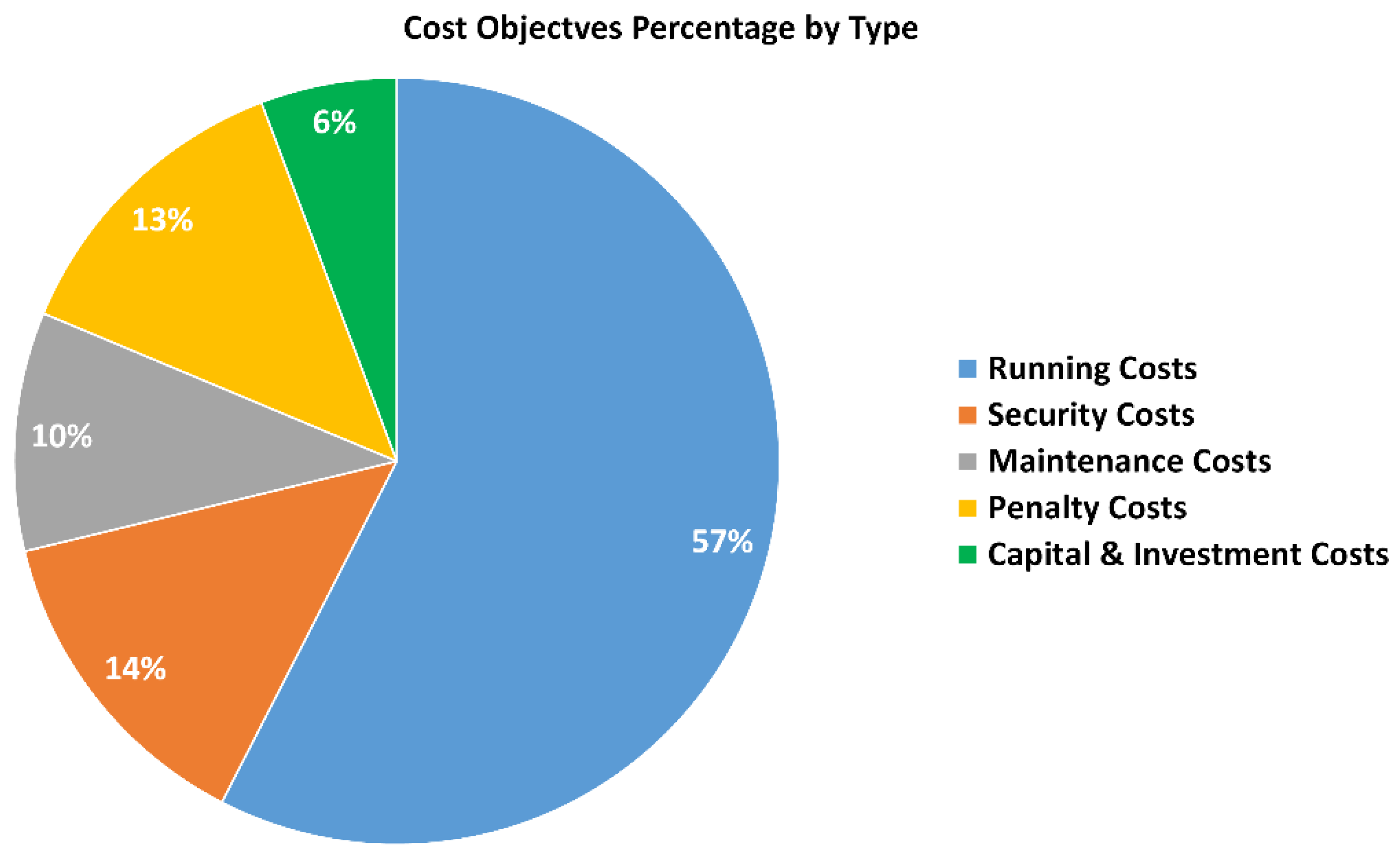
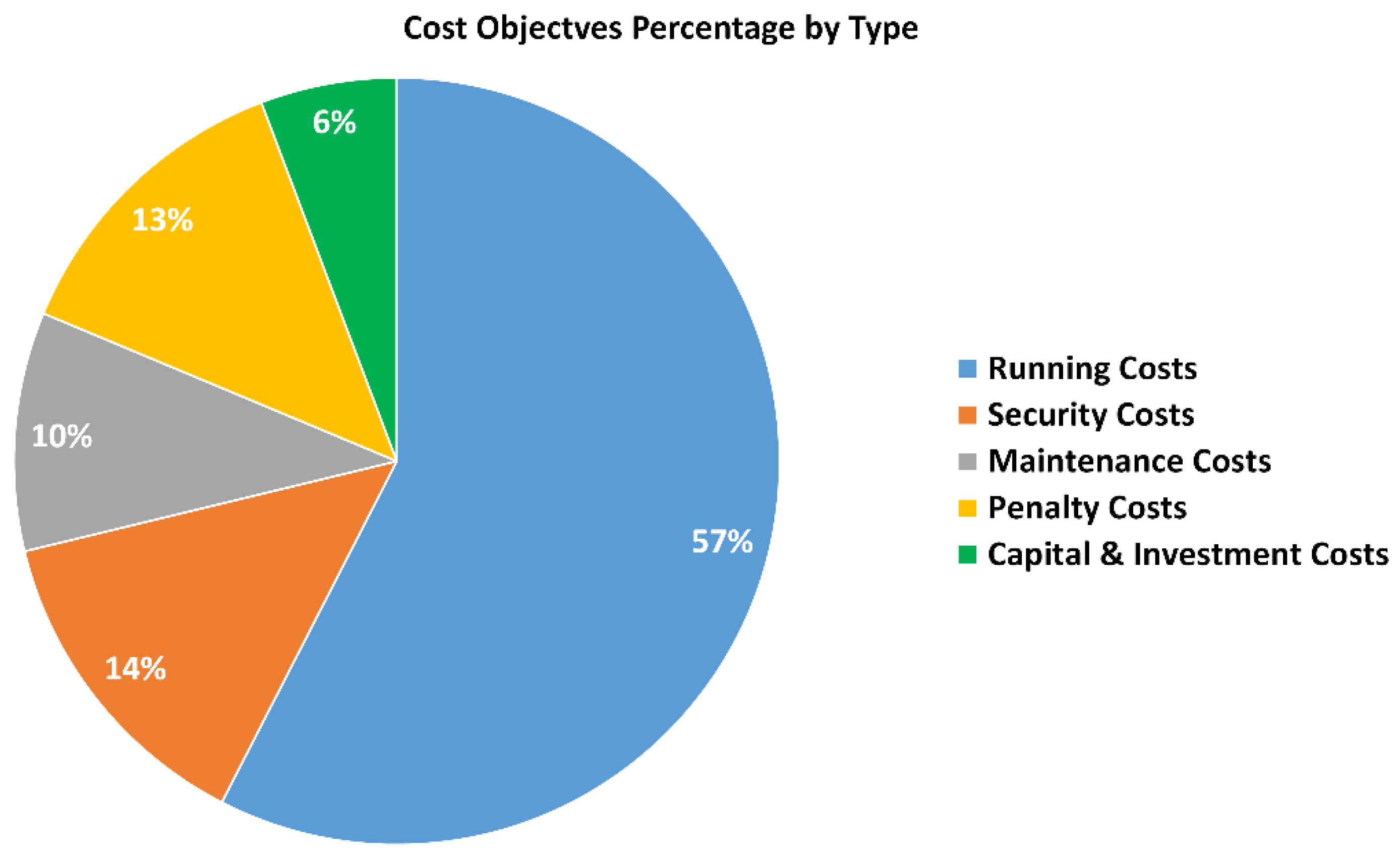
3.1. Objective Functions
3.1.1. Cost Minimization and Profit Maximization
3.1.2. Emissions Reduction
3.1.3. Voltage Regulation Objectives
3.1.4. Frequency Regulation Objectives
3.1.5. Loadability Maximization
3.1.6. Losses Reduction
3.1.7. Power-Sharing Error Reduction
3.1.8. Stability Improvement
3.1.9. Reliability Maximization
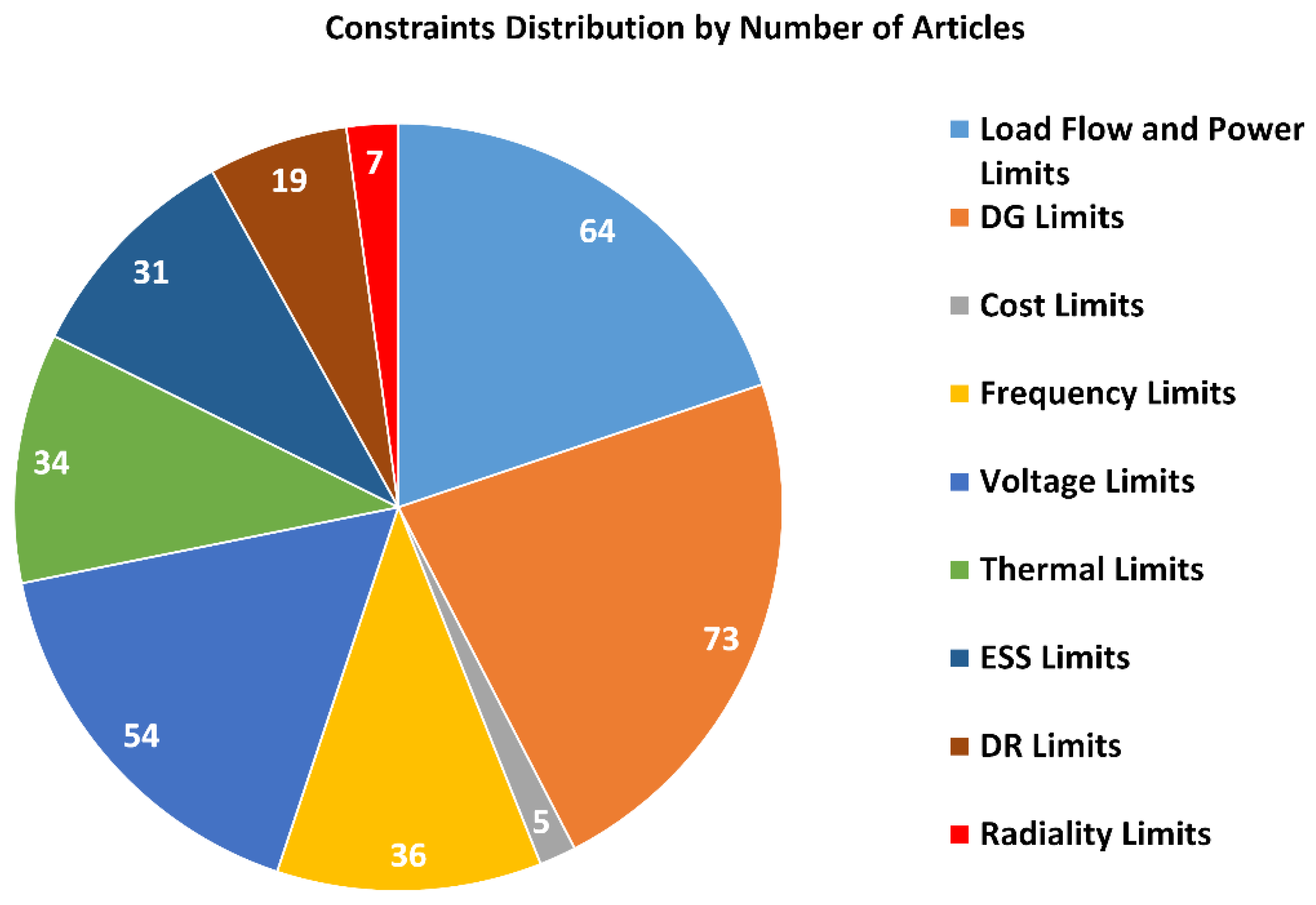
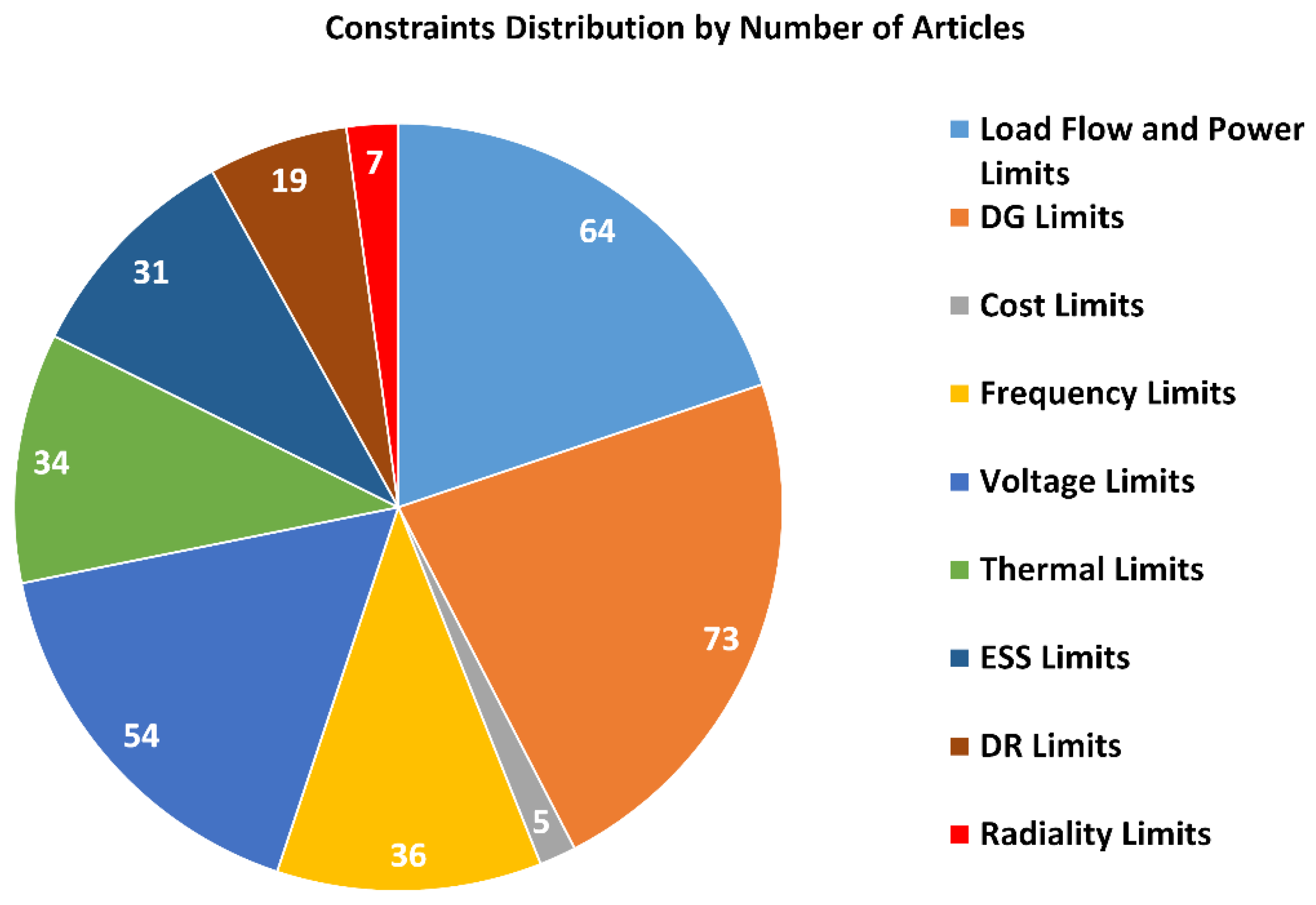
3.2. Constraints
3.2.1. Power Flow and Balance Equality Constraint
3.2.2. DG Power Limits
3.2.3. Cost Limits
3.2.4. Frequency Limits
3.2.5. Voltage Limits
3.2.6. Thermal Limits
3.2.7. ESS Limits
3.2.8. DR Limits
3.2.9. Radiality Limits
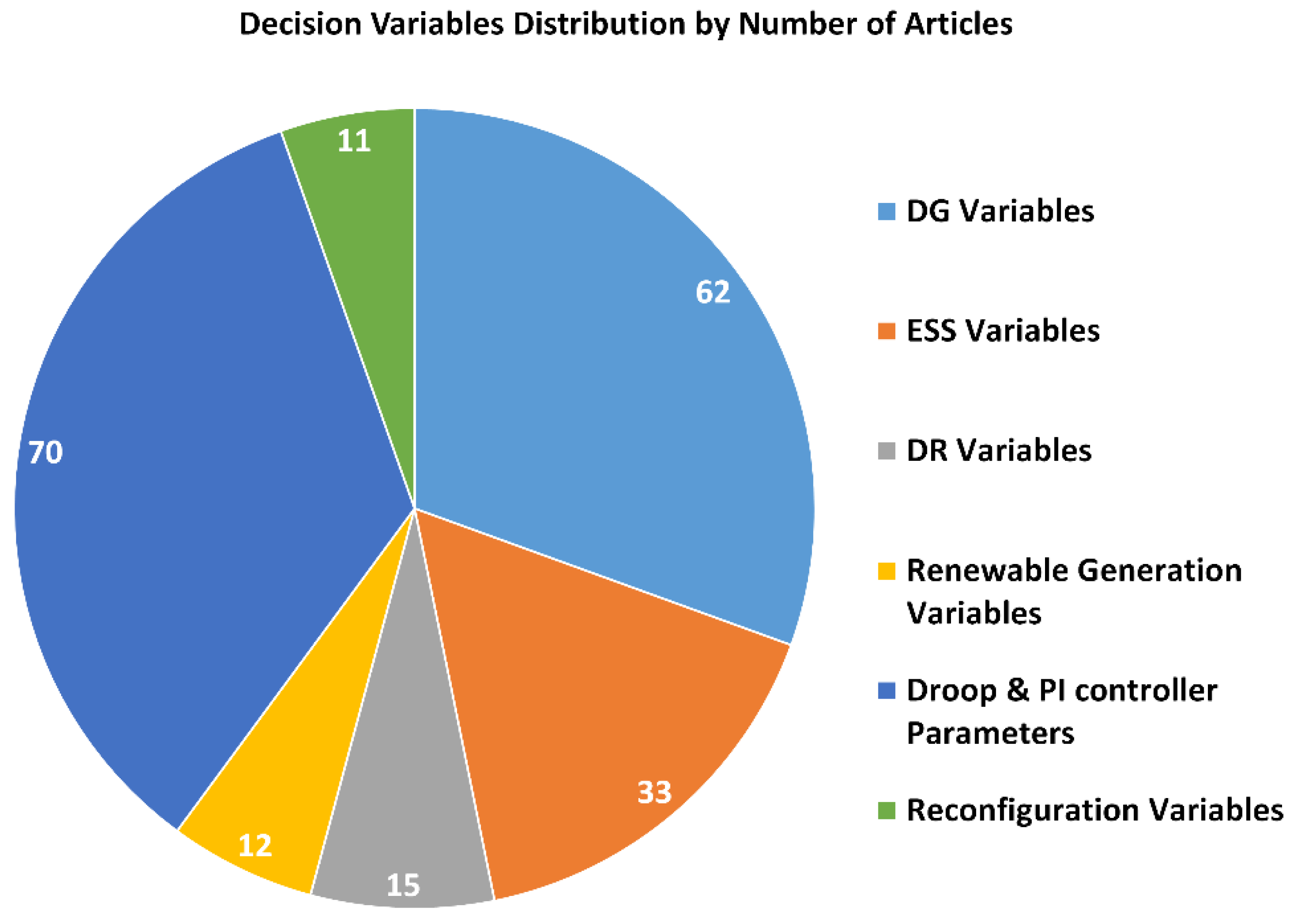
3.3. Decision Variables
3.3.1. DG Variables
3.3.2. ESS Variables
3.3.3. DR Variables
3.3.4. Renewable Generation Variables
3.3.5. Droop and PI Controller Parameters
3.3.6. Reconfiguration Variables
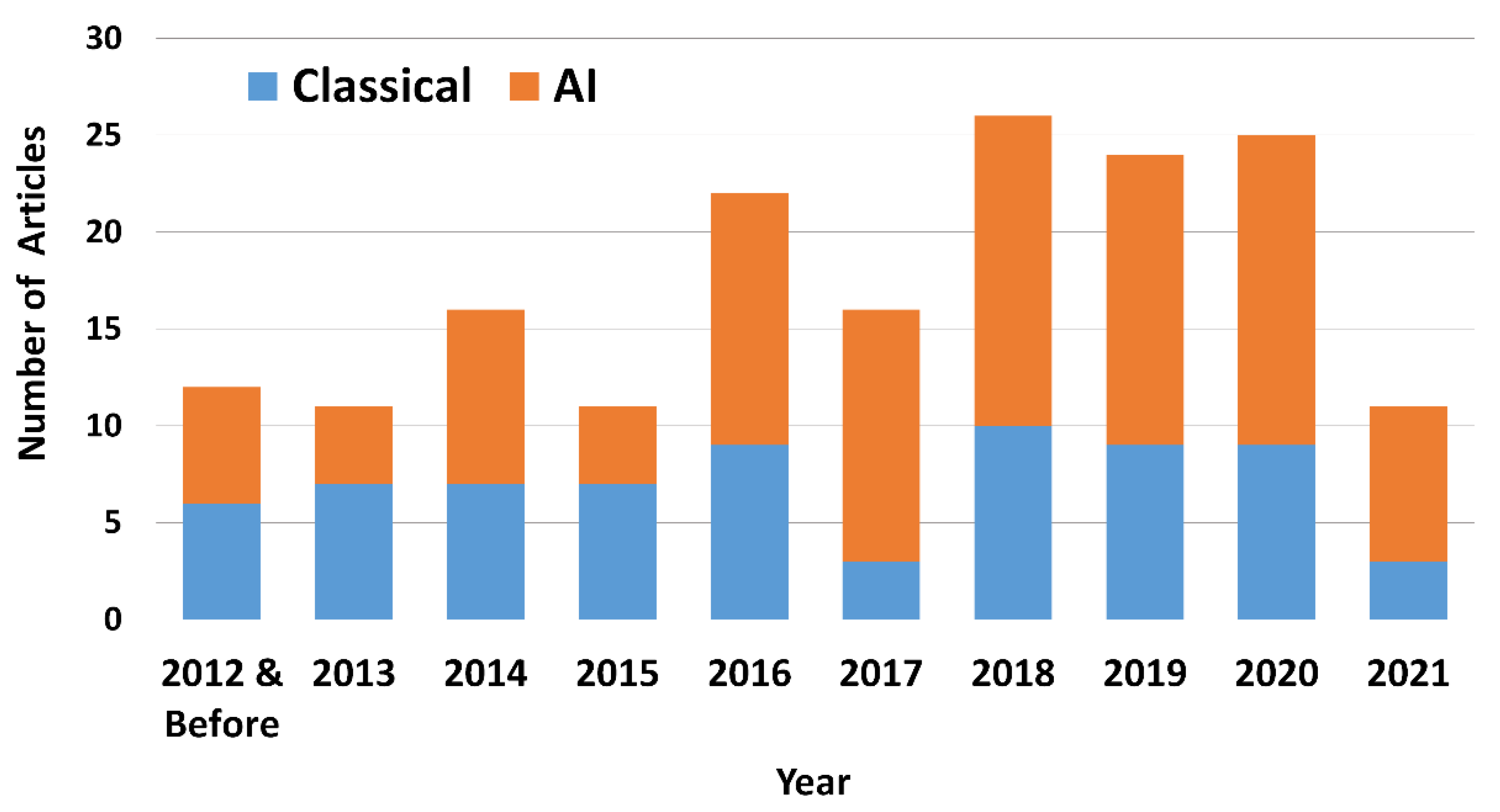
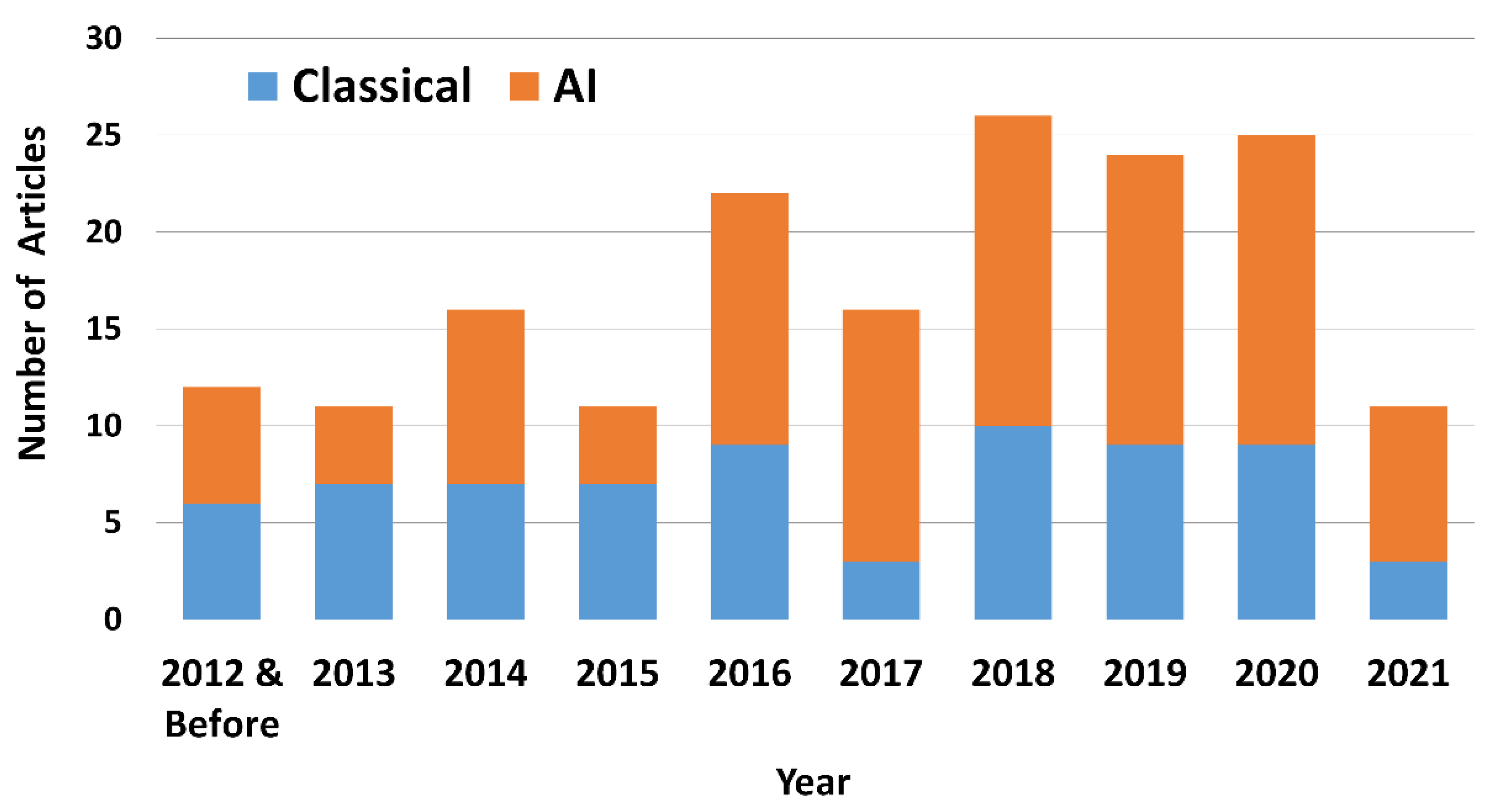
3.4. Optimization Algorithms
3.4.1. Classical Optimization Algorithms
3.4.2. AI Optimization Algorithms
- Socially and Physically Inspired Metaheuristics
- Nature-Inspired Metaheuristics
3.4.3. Hybrid Optimization Algorithms
4. Discussion
5. Future Trends
- Generation mix allocation: The importance of having a balanced generation portfolio is fundamental to increase the competitiveness of DCIMG. Hence, determining the optimal DG type, fuel mix, and renewable technology based on economic, environmental, and technical objectives in an aggregated manner is another important direction in future research for the optimal allocation and operation of DCIMG.
- ESS efficiency and environmental impact: Quite often, ESS studies neglect the efficiency and environmental aspect of ESS allocation and operation. It is important to have a thorough investigation to analyze the cost associated with ESS decommissioning and the environmental consequences in storage unit recycling, if any. Similarly, the need is still there for adopting more energy-efficient and fast-charging/discharging ESS technologies at lower costs to make this investment a viable option for isolated and remote DCIMG.
- DR and EV charging coordination issues: DR and EV charging programs are necessary to drive down the generation costs and emissions. However, studies often neglect the behavioral and coordination impact of utilizing these programs for practical voltage and frequency support in DCIMG. Thus, including DR and EV charging programs as uncertain stochastic variables is necessary in future planning and dispatch studies.
- Protection consideration: A comprehensive protection scheme is necessary to ensure safe and reliable disconnection and restoration of supply in the events of faults. Optimization studies must consider protection strategy costs, short circuit calculation, fault levels, and X/R ratio impact on DCIMG operation. This should be of high interest, especially with future DG and ESS allocation studies.
- Uncertainty in microgrids operation: The uncertainty considered in most optimization studies is based on pattern observation or historical recorded data for generation and demand and is often studied in planning studies only. However, in reality, dispatch operations may suffer from unaccounted for uncertainties occurring in a very short period, much smaller than normal load cycles, which could lead the MG to rely on conventional generation or grid-imported power to compensate for any mismatch. This has a negative impact on the carbon footprint of these microgrids and the design philosophy for autonomous operation of DCIMG. Therefore, future scheduling and dispatch studies must include a safety margin in the EMS execution time to account for unseen risks and be equipped with fast analysis techniques to handle short-term uncertainty forecast data.
- Off-peak hours of operation: According to most reviewed articles with intermittent renewable energy utilization, the probability of high generation-to-load mismatch is higher at off-peak hours of operation. Therefore, future studies should focus on useful DL applications to manage excess generation taking cost, emissions, and uncertainty as deciding factors. Additionally, there is a growing need for a comprehensive EMS that is capable of managing power sharing accurately in DCIMG during peak and off-peak hours of operation.
- Applicability of control systems: Many of the control and EMS solutions discussed in this review were applied to small-scale microgrids with few numbers of buses. Furthermore, many of the associated costs for the communication infrastructure and additional equipment were not accounted for. Hence, future research must take into consideration the applicability of these power control solutions on large-scale DCIMG and conduct a cost-based analysis to recommend these systems for practice, especially in low-budget, remote, and isolated microgrids.
- Optimization methods practicality: Despite the significant number of metaheuristics used in DCIMG optimization, many of them lack the accuracy classical methods offer. This is necessary to decrease the computation time without compromising on accuracy to enable real-time application of these AI optimization methods. Furthermore, embedding more adaptable decision-making criteria with these algorithms is vital to avoid guiding the pareto selection process into an area of unbalanced weights for the objectives.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronyms | Definition | Acronyms | Definition |
|---|---|---|---|
| ABC | Artificial Bee Colony | LP | Linear Programming |
| AC | Alternating Current | LV | Low Voltage |
| AI | Artificial Intelligence | MAS | Multi Agent System |
| ALO | Ant-Lion Optimizer | MCDP | Multi criteria Decision Problem |
| BB-BC | Big Bang-Big Crunch | MCS | Monte-Carlo Simulation |
| BESS | Battery Energy Storage System | MG | Microgrid |
| DC | Direct Current | MGCC | Microgrid Central Controller |
| DCIMG | Droop-Controlled Islanded Microgrid | MILP | Mixed Integer Linear Programming |
| DG | Distributed Generation | MINLP | Mixed-Integer Non-Linear Programming |
| DL | Dump Load | MOO | Multi-Objective Optimization |
| DR | Demand Response | MV | Medium Voltage |
| DP | Dynamic Programing | NLP | Non-Linear Programming |
| EA | Evolutionary Algorithms | NSGA | Non-dominated Sorting Genetic Algorithm |
| EDP | Economic Dispatch Problem | OPF | Optimal Power Flow |
| EMS | Energy Management System | OUP | Optimization with Uncertainty Problem |
| ES | Exhaustive Search | PET | Power Electronic Transformer |
| ESS | Energy Storage System | PI | Proportional-Integral |
| EV | Electric Vehicle | PSO | Particle Swarm Optimization |
| FESS | Flywheel Energy Storage System | PV | Photovoltaic |
| FL | Fuzzy Logic | SOC | State of Charge |
| FIS | Fuzzy Inference System | SQP | Sequential Quadratic Programming |
| GA | Genetic Algorithm | SSIA | Salp-swarm Inspired Algorithm |
| GWO | Grey Wolf Optimizer | SVAPO | Searching Vector Artificial Physics Optimization |
| HESS | Hydraulic Energy Storage System | TLBO | Teaching Learning Based Optimization |
| HS | Harmony Search | TVV | Total Voltage Variations |
| IBDG | Inverter-Based Distributed Generation | UCP | Unit Commitment Problem |
| ICA | Imperialist Competition Algorithm | VRBESS | Vanadium Redox Battery Energy Storage System |
| ITAE | Integral Time Absolute Error | VSI | Voltage Stability Index |
| LABESS | Lead-Acid Battery Energy Storage System | WT | Wind Turbine |
References
- Pohekar, S.; Ramachandran, M. Application of multi-criteria decision making to sustainable energy planning—A review. Renew. Sustain. Energy Rev. 2004, 8, 365–381. [Google Scholar] [CrossRef]
- Georgilakis, P.; Hatziargyriou, N.D. Optimal Distributed Generation Placement in Power Distribution Networks: Models, Methods, and Future Research. IEEE Trans. Power Syst. 2013, 28, 3420–3428. [Google Scholar] [CrossRef]
- Parhizi, S.; Lotfi, H.; Khodaei, A.; Bahramirad, S. State of the Art in Research on Microgrids: A Review. IEEE Access 2015, 3, 890–925. [Google Scholar] [CrossRef]
- Gamarra, C.; Guerrero, J. Computational optimization techniques applied to microgrids planning: A review. Renew. Sustain. Energy Rev. 2015, 48, 413–424. [Google Scholar] [CrossRef] [Green Version]
- Jordehi, A.R. Allocation of distributed generation units in electric power systems: A review. Renew. Sustain. Energy Rev. 2016, 56, 893–905. [Google Scholar] [CrossRef]
- Khan, A.A.; Naeem, M.; Iqbal, M.; Qaisar, S.; Anpalagan, A. A compendium of optimization objectives, constraints, tools and algorithms for energy management in microgrids. Renew. Sustain. Energy Rev. 2016, 58, 1664–1683. [Google Scholar] [CrossRef]
- Evangelopoulos, V.A.; Georgilakis, P.S.; Hatziargyriou, N.D. Optimal operation of smart distribution networks: A review of models, methods and future research. Electr. Power Syst. Res. 2016, 140, 95–106. [Google Scholar] [CrossRef]
- Badran, O.; Mekhilef, S.; Mokhlis, H.; Dahalan, W. Optimal reconfiguration of distribution system connected with distributed generations: A review of different methodologies. Renew. Sustain. Energy Rev. 2017, 73, 854–867. [Google Scholar] [CrossRef]
- Mahmoud Pesaran, H.A.; Huy, P.D.; Ramachandaramurthy, V.K. A review of the optimal allocation of distributed generation: Objectives, constraints, methods, and algorithms. Renew. Sustain. Energy Rev. 2017, 75, 293–312. [Google Scholar] [CrossRef]
- Singh, B.; Sharma, J. A review on distributed generation planning. Renew. Sustain. Energy Rev. 2017, 76, 529–544. [Google Scholar] [CrossRef]
- Andishgar, M.H.; Gholipour, E.; Hooshmand, R.-A. An overview of control approaches of inverter-based microgrids in islanding mode of operation. Renew. Sustain. Energy Rev. 2017, 80, 1043–1060. [Google Scholar] [CrossRef]
- Kakran, S.; Chanana, S. Smart operations of smart grids integrated with distributed generation: A review. Renew. Sustain. Energy Rev. 2018, 81, 524–535. [Google Scholar] [CrossRef]
- Dawoud, S.M.; Lin, X.; Okba, M.I. Hybrid renewable microgrid optimization techniques: A review. Renew. Sustain. Energy Rev. 2018, 82, 2039–2052. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, S.; Zhu, Y.; Wang, D.; Liu, J. Modeling, planning, application and management of energy systems for isolated areas: A review. Renew. Sustain. Energy Rev. 2018, 82, 460–470. [Google Scholar] [CrossRef]
- Zia, M.F.; Elbouchikhi, E.; Benbouzid, M. Microgrids energy management systems: A critical review on methods, solutions, and prospects. Appl. Energy 2018, 222, 1033–1055. [Google Scholar] [CrossRef]
- Wong, L.A.; Ramachandaramurthy, V.K.; Taylor, P.; Ekanayake, J.; Walker, S.L.; Padmanaban, S. Review on the optimal placement, sizing and control of an energy storage system in the distribution network. J. Energy Storage 2019, 21, 489–504. [Google Scholar] [CrossRef]
- Pourbehzadi, M.; Niknam, T.; Aghaei, J.; Mokryani, G.; Shafie-Khah, M.; Catalão, J.P.S. Optimal operation of hybrid AC/DC microgrids under uncertainty of renewable energy resources: A comprehensive review. Int. J. Electr. Power Energy Syst. 2019, 109, 139–159. [Google Scholar] [CrossRef]
- Fontenot, H.; Dong, B. Modeling and control of building-integrated microgrids for optimal energy management—A review. Appl. Energy 2019, 254, 113689. [Google Scholar] [CrossRef]
- Cagnano, A.; De Tuglie, E.; Mancarella, P. Microgrids: Overview and guidelines for practical implementations and operation. Appl. Energy 2020, 258, 114039. [Google Scholar] [CrossRef]
- Hannan, M.; Tan, S.Y.; Al-Shetwi, A.Q.; Jern, K.P.; Begum, R. Optimized controller for renewable energy sources integration into microgrid: Functions, constraints and suggestions. J. Clean. Prod. 2020, 256, 120419. [Google Scholar] [CrossRef]
- Anderson, A.A.; Suryanarayanan, S. Review of energy management and planning of islanded microgrids. CSEE J. Power Energy Syst. 2020, 6, 329–343. [Google Scholar] [CrossRef]
- Saad, O.; Abdeljebbar, C. Historical Literature Review of Optimal Placement of Electrical Devices in Power Systems: Critical Analysis of Renewable Distributed Generation Efforts. IEEE Syst. J. 2020, 1–12. [Google Scholar] [CrossRef]
- Hannan, M.; Faisal, M.; Ker, P.J.; Begum, R.; Dong, Z.; Zhang, C. Review of optimal methods and algorithms for sizing energy storage systems to achieve decarbonization in microgrid applications. Renew. Sustain. Energy Rev. 2020, 131, 110022. [Google Scholar] [CrossRef]
- Jirdehi, M.A.; Tabar, V.S.; Ghassemzadeh, S.; Tohidi, S. Different aspects of microgrid management: A comprehensive review. J. Energy Storage 2020, 30, 101457. [Google Scholar] [CrossRef]
- IEEE. Guide for Design, Operation, and Integration of Distributed Resource Island Systems with Electric Power Systems; IEEE Std. 15474–2011; IEEE: New York, NY, USA, 2011; pp. 1–54. [Google Scholar] [CrossRef]
- IEEE. Guide for Conducting Distribution Impact Studies for Distributed Resource Interconnection; IEEE Std. 15477–2013; IEEE: New York, NY, USA, 2014; pp. 1–137. [Google Scholar] [CrossRef]
- Basati, A.; Menhaj, M.B.; Fakharian, A. GA-based optimal droop control approach to improve voltage regulation and equal power sharing for islanded DC microgrids. In Proceedings of the PQ2016 the 10th International Conference: 2016 Electric Power Quality and Supply Reliability (PQ), Tallinn, Estonia, 29–31 August 2016. [Google Scholar] [CrossRef]
- Angjelichinoski, M.; Scaglione, A.; Popovski, P.; Stefanovic, C. Decentralized DC Microgrid Monitoring and Optimization via Primary Control Perturbations. IEEE Trans. Signal Process. 2018, 66, 3280–3295. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Dörfler, F. Distributed control and optimization in DC microgrids. Automatica 2015, 61, 18–26. [Google Scholar] [CrossRef]
- Hamad, A.A.; El-Saadany, E.F. Multi-agent supervisory control for optimal economic dispatch in DC microgrids. Sustain. Cities Soc. 2016, 27, 129–136. [Google Scholar] [CrossRef]
- Meng, L.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. Tertiary and Secondary Control Levels for Efficiency Optimization and System Damping in Droop Controlled DC–DC Converters. IEEE Trans. Smart Grid 2015, 6, 2615–2626. [Google Scholar] [CrossRef] [Green Version]
- Nempu, P.B.; Jayalakshmi, N.; Shaji, K.; Singh, M. Fuzzy-PI Controllers for Voltage and Frequency Regulation of a PV-FC Based Autonomous Microgrid. In Proceedings of the 2019 IEEE International Conference on Distributed Computing, VLSI, Electrical Circuits and Robotics (DISCOVER), Karnataka, India, 11–12 August 2019; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Sahoo, S.; Mishra, S.; Jha, S.; Singh, B. A Cooperative Adaptive Droop Based Energy Management and Optimal Voltage Regulation Scheme for DC Microgrids. IEEE Trans. Ind. Electron. 2020, 67, 2894–2904. [Google Scholar] [CrossRef]
- Dragicevic, T.; Guerrero, J.; Vasquez, J.C. A Distributed Control Strategy for Coordination of an Autonomous LVDC Microgrid Based on Power-Line Signaling. IEEE Trans. Ind. Electron. 2013, 61, 3313–3326. [Google Scholar] [CrossRef] [Green Version]
- Hajebrahimi, H.; Kaviri, S.M.; Eren, S.; Bakhshai, A. A New Energy Management Control Method for Energy Storage Systems in Microgrids. IEEE Trans. Power Electron. 2020, 35, 11612–11624. [Google Scholar] [CrossRef]
- Maulik, A.; Das, D. Stability Constrained Economic Operation of Islanded Droop-Controlled DC Microgrids. IEEE Trans. Sustain. Energy 2019, 10, 569–578. [Google Scholar] [CrossRef]
- Maulik, A.; Das, D. Optimal operation of a droop-controlled DCMG with generation and load uncertainties. IET Gener. Transm. Distrib. 2018, 12, 2905–2917. [Google Scholar] [CrossRef]
- Cingoz, F.; Elrayyah, A.; Sozer, Y. Optimized Settings of Droop Parameters Using Stochastic Load Modeling for Effective DC Microgrids Operation. IEEE Trans. Ind. Appl. 2017, 53, 1358–1371. [Google Scholar] [CrossRef]
- Bukar, A.L.; Tan, C.W.; Lau, K.Y. Optimal sizing of an autonomous photovoltaic/wind/battery/diesel generator microgrid using grasshopper optimization algorithm. Sol. Energy 2019, 188, 685–696. [Google Scholar] [CrossRef]
- Dong, L.; Zhang, T.; Pu, T.; Chen, N.; Sun, Y. A Decentralized Optimal Operation of AC/DC Hybrid Microgrids Equipped with Power Electronic Transformer. IEEE Access 2019, 7, 157946–157959. [Google Scholar] [CrossRef]
- Dissanayake, A.M.; Ekneligoda, N.C. Multiobjective Optimization of Droop-Controlled Distributed Generators in DC Microgrids. IEEE Trans. Ind. Inform. 2020, 16, 2423–2435. [Google Scholar] [CrossRef]
- Eajal, A.A.; Yazdavar, A.H.; El-Saadany, E.F.; Salama, M.M.A. Optimizing the Droop Characteristics of AC/DC Hybrid Microgrids for Precise Power Sharing. IEEE Syst. J. 2021, 15, 560–569. [Google Scholar] [CrossRef]
- Lasseter, R.H.; Chen, Z.; Pattabiraman, D. Grid-Forming Inverters: A Critical Asset for the Power Grid. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 925–935. [Google Scholar] [CrossRef]
- Zuo, Y.; Yuan, Z.; Sossan, F.; Zecchino, A.; Cherkaoui, R.; Paolone, M. Performance assessment of grid-forming and grid-following converter-interfaced battery energy storage systems on frequency regulation in low-inertia power grids. Sustain. Energy Grids Netw. 2021, 27, 100496. [Google Scholar] [CrossRef]
- Unruh, P.; Nuschke, M.; Strauß, P.; Welck, F. Overview on Grid-Forming Inverter Control Methods. Energies 2020, 13, 2589. [Google Scholar] [CrossRef]
- Sedighizadeh, M.; Esmaili, M.; Eisapour-Moarref, A. Voltage and frequency regulation in autonomous microgrids using Hybrid Big Bang-Big Crunch algorithm. Appl. Soft Comput. 2017, 52, 176–189. [Google Scholar] [CrossRef]
- Eisapour-Moarref, A.; Sedighizadeh, M.; Esmaili, M. Multi-objective voltage and frequency regulation in autonomous microgrids using Pareto-based Big Bang-Big Crunch algorithm. Control. Eng. Pract. 2016, 55, 56–68. [Google Scholar] [CrossRef]
- Jumani, T.A.; Mustafa, M.W.; Rasid, M.M.; Mirjat, N.H.; Leghari, Z.H.; Saeed, M.S. Optimal Voltage and Frequency Control of an Islanded Microgrid using Grasshopper Optimization Algorithm. Energies 2018, 11, 3191. [Google Scholar] [CrossRef] [Green Version]
- Al-Saedi, W.; Lachowicz, S.W.; Habibi, D.; Bass, O. Voltage and frequency regulation based DG unit in an autonomous microgrid operation using Particle Swarm Optimization. Int. J. Electr. Power Energy Syst. 2013, 53, 742–751. [Google Scholar] [CrossRef]
- Al-Saedi, W.; Lachowicz, S.W.; Habibi, D.; Bass, O. Power quality enhancement in autonomous microgrid operation using Particle Swarm Optimization. Int. J. Electr. Power Energy Syst. 2012, 42, 139–149. [Google Scholar] [CrossRef]
- Qazi, S.H.; Mustafa, M.W.; Sultana, U.; Mirjat, N.H.; Soomro, S.A.; Rasheed, N. Regulation of Voltage and Frequency in Solid Oxide Fuel Cell-Based Autonomous Microgrids Using the Whales Optimisation Algorithm. Energies 2018, 11, 1318. [Google Scholar] [CrossRef] [Green Version]
- Ahmadi, S.; Shokoohi, S.; Bevrani, H. A fuzzy logic-based droop control for simultaneous voltage and frequency regulation in an AC microgrid. Int. J. Electr. Power Energy Syst. 2015, 64, 148–155. [Google Scholar] [CrossRef]
- Bevrani, H.; Shokoohi, S. An Intelligent Droop Control for Simultaneous Voltage and Frequency Regulation in Islanded Microgrids. IEEE Trans. Smart Grid 2013, 4, 1505–1513. [Google Scholar] [CrossRef]
- Alghamdi, B.; Canizares, C.A. Frequency Regulation in Isolated Microgrids Through Optimal Droop Gain and Voltage Control. IEEE Trans. Smart Grid 2021, 12, 988–998. [Google Scholar] [CrossRef]
- Wies, R.W.; Chukkapalli, E.; Stoffels, M.M. Improved frequency regulation in mini-grids with high wind contribution using online genetic algorithm for PID tuning. In Proceedings of the 2014 IEEE PES General Meeting, Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Arani, A.A.K.; Gharehpetian, G.B.; Abedi, M. A Novel Control Method Based on Droop for Cooperation of Flywheel and Battery Energy Storage Systems in Islanded Microgrids. IEEE Syst. J. 2019, 14, 1080–1087. [Google Scholar] [CrossRef]
- Khorramdel, B.; Raoofat, M. Optimal stochastic reactive power scheduling in a microgrid considering voltage droop scheme of DGs and uncertainty of wind farms. Energy 2012, 45, 994–1006. [Google Scholar] [CrossRef]
- Vinayagam, A.; Abu Alqumsan, A.; Swarna, K.; Khoo, S.Y.; Stojcevski, A. Intelligent control strategy in the islanded network of a solar PV microgrid. Electr. Power Syst. Res. 2018, 155, 93–103. [Google Scholar] [CrossRef]
- Bai, W.; Abedi, M.R.; Lee, K.Y. Distributed generation system control strategies with PV and fuel cell in microgrid operation. Control. Eng. Pract. 2016, 53, 184–193. [Google Scholar] [CrossRef]
- Hassan, M.; Abido, M. Optimal Design of Microgrids in Autonomous and Grid-Connected Modes Using Particle Swarm Optimization. IEEE Trans. Power Electron. 2011, 26, 755–769. [Google Scholar] [CrossRef]
- Hassan, M.; Abido, M. Real time implementation and optimal design of autonomous microgrids. Electr. Power Syst. Res. 2014, 109, 118–127. [Google Scholar] [CrossRef]
- Yu, K.; Ai, Q.; Wang, S.; Ni, J.; Lv, T. Analysis and Optimization of Droop Controller for Microgrid System Based on Small-Signal Dynamic Model. IEEE Trans. Smart Grid 2015, 7, 1–11. [Google Scholar] [CrossRef]
- Vemula, N.K.; Parida, S.K. Enhancement of small signal stability in inverter-dominated microgrid with optimal internal model controller. Int. Trans. Electr. Energy Syst. 2020, 30. [Google Scholar] [CrossRef]
- Zhang, L.; Zheng, H.; Hu, Q.; Su, B.; Lyu, L. An Adaptive Droop Control Strategy for Islanded Microgrid Based on Improved Particle Swarm Optimization. IEEE Access 2020, 8, 3579–3593. [Google Scholar] [CrossRef]
- Moussa, H.; Shahin, A.; Martin, J.-P.; Pierfederici, S.; Moubayed, N. Optimal Angle Droop for Power Sharing Enhancement with Stability Improvement in Islanded Microgrids. IEEE Trans. Smart Grid 2018, 9, 5014–5026. [Google Scholar] [CrossRef]
- Wu, X.; Shen, C.; Iravani, R. Feasible Range and Optimal Value of the Virtual Impedance for Droop-Based Control of Microgrids. IEEE Trans. Smart Grid 2017, 8, 1242–1251. [Google Scholar] [CrossRef]
- Zhu, Y.; Fan, Q.; Liu, B.; Wang, T. An Enhanced Virtual Impedance Optimization Method for Reactive Power Sharing in Microgrids. IEEE Trans. Power Electron. 2018, 33, 10390–10402. [Google Scholar] [CrossRef]
- Keypour, R.; Adineh, B.; Khooban, M.H.; Blaabjerg, F. A New Population-Based Optimization Method for Online Minimization of Voltage Harmonics in Islanded Microgrids. IEEE Trans. Circuits Syst. II Express Briefs 2019, 67, 1084–1088. [Google Scholar] [CrossRef]
- El-Sayed, W.T.; Azzouz, M.A.; Zeineldin, H.H.; El-Saadany, E.F. A Harmonic Time-Current-Voltage Directional Relay for Optimal Protection Coordination of Inverter-Based Islanded Microgrids. IEEE Trans. Smart Grid 2021, 12, 1904–1917. [Google Scholar] [CrossRef]
- Ebrahim, M.A.; Fattah, R.M.A.; Saied, E.M.M.; Maksoud, S.M.A.; El Khashab, H. Real-Time Implementation of Self-Adaptive Salp Swarm Optimization-Based Microgrid Droop Control. IEEE Access 2020, 8, 185738–185751. [Google Scholar] [CrossRef]
- Vigneysh, T.; Kumarappan, N. Autonomous operation and control of photovoltaic/solid oxide fuel cell/battery energy storage based microgrid using fuzzy logic controller. Int. J. Hydrog. Energy 2016, 41, 1877–1891. [Google Scholar] [CrossRef]
- Elrayyah, A.; Sozer, Y.; Elbuluk, M. A novel load flow analysis for particle-swarm optimized microgrid power sharing. In Proceedings of the 2013 Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 17–21 March 2013; pp. 297–302. [Google Scholar] [CrossRef]
- Mueller, J.A.; Kimball, J.W. An Efficient Method of Determining Operating Points of Droop-Controlled Microgrids. IEEE Trans. Energy Convers. 2017, 32, 1432–1446. [Google Scholar] [CrossRef]
- Elrayyah, A.; Sozer, Y.; Elbuluk, M.E. A Novel Load-Flow Analysis for Stable and Optimized Microgrid Operation. IEEE Trans. Power Deliv. 2014, 29, 1709–1717. [Google Scholar] [CrossRef]
- Li, Z.; Zang, C.; Zeng, P.; Yu, H.; Li, S. Agent-based distributed and economic automatic generation control for droop-controlled AC microgrids. IET Gener. Transm. Distrib. 2016, 10, 3622–3630. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Y.; Xin, H.; Gooi, H.B.; Pan, J. Distributed Optimal Tie-Line Power Flow Control for Multiple Interconnected AC Microgrids. IEEE Trans. Power Syst. 2019, 34, 1869–1880. [Google Scholar] [CrossRef]
- Zhang, W.; Xu, Y. Distributed Optimal Control for Multiple Microgrids in a Distribution Network. IEEE Trans. Smart Grid 2019, 10, 3765–3779. [Google Scholar] [CrossRef]
- Du, W.; Yao, L.; Wu, D.; Li, X.; Liu, G.; Yang, T. Accelerated Distributed Energy Management for Microgrids. In Proceedings of the 2018 IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–9 August 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Zhao, T.; Ding, Z. Distributed Agent Consensus-Based Optimal Resource Management for Microgrids. IEEE Trans. Sustain. Energy 2017, 9, 443–452. [Google Scholar] [CrossRef]
- Zhao, T.; Ding, Z. Distributed Finite-Time Optimal Resource Management for Microgrids Based on Multi-Agent Framework. IEEE Trans. Ind. Electron. 2018, 65, 6571–6580. [Google Scholar] [CrossRef] [Green Version]
- He, Y.; Wang, W.; Wu, X. Multi-Agent Based Fully Distributed Economic Dispatch in Microgrid Using Exact Diffusion Strategy. IEEE Access 2020, 8, 7020–7031. [Google Scholar] [CrossRef]
- Dheer, D.K.; Doolla, S.; Bandyopadhyay, S.; Guerrero, J. Effect of placement of droop based generators in distribution network on small signal stability margin and network loss. Int. J. Electr. Power Energy Syst. 2017, 88, 108–118. [Google Scholar] [CrossRef] [Green Version]
- Nandar, C.S.A. Robust PI control of smart controllable load for frequency stabilization of microgrid power system. Renew. Energy 2013, 56, 16–23. [Google Scholar] [CrossRef]
- Maulik, A.; Das, D. Optimal Operation of Droop-Controlled Islanded Microgrids. IEEE Trans. Sustain. Energy 2018, 9, 1337–1348. [Google Scholar] [CrossRef]
- Jithendranath, J.; Das, D. Scenario-based multi-objective optimisation with loadability in islanded microgrids considering load and renewable generation uncertainties. IET Renew. Power Gener. 2019, 13, 785–800. [Google Scholar] [CrossRef]
- Vergara, P.P.; Lopez, J.C.; Rider, M.J.; Da Silva, L.C.P. Optimal Operation of Unbalanced Three-Phase Islanded Droop-Based Microgrids. IEEE Trans. Smart Grid 2019, 10, 928–940. [Google Scholar] [CrossRef]
- Singh, S.; Singh, M.; Kaushik, S.C. Optimal power scheduling of renewable energy systems in microgrids using distributed energy storage system. IET Renew. Power Gener. 2016, 10, 1328–1339. [Google Scholar] [CrossRef]
- Vergara, P.P.; Rey, J.M.; Lopez, J.C.; Rider, M.J.; Da Silva, L.C.P.; Shaker, H.R.; Jorgensen, B.N. A Generalized Model for the Optimal Operation of Microgrids in Grid-Connected and Islanded Droop-Based Mode. IEEE Trans. Smart Grid 2019, 10, 5032–5045. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Z.; Zhao, D.; Lei, H.; Cui, B.; Li, S. Incorporating energy storage and user experience in isolated microgrid dispatch using a multi-objective model. IET Renew. Power Gener. 2019, 13, 973–981. [Google Scholar] [CrossRef] [Green Version]
- Harasis, S.; Sozer, Y.; Elbuluk, M. Reliable Islanded Microgrid Operation Using Dynamic Optimal Power Management. IEEE Trans. Ind. Appl. 2021, 57, 1755–1766. [Google Scholar] [CrossRef]
- Rezaei, N.; Kalantar, M. Hierarchical energy and frequency security pricing in a smart microgrid: An equilibrium-inspired epsilon constraint based multi-objective decision making approach. Energy Convers. Manag. 2015, 98, 533–543. [Google Scholar] [CrossRef]
- Rezaei, N.; Kalantar, M. Smart microgrid hierarchical frequency control ancillary service provision based on virtual inertia concept: An integrated demand response and droop controlled distributed generation framework. Energy Convers. Manag. 2015, 92, 287–301. [Google Scholar] [CrossRef]
- Zhou, Q.; Shahidehpour, M.; AlAbdulwahab, A.; Abusorrah, A.M. Privacy-Preserving Distributed Control Strategy for Optimal Economic Operation in Islanded Reconfigurable Microgrids. IEEE Trans. Power Syst. 2020, 35, 3847–3856. [Google Scholar] [CrossRef]
- Abdelaziz, M.; Farag, H.E.; El-Saadany, E.F. Optimum Droop Parameter Settings of Islanded Microgrids with Renewable Energy Resources. IEEE Trans. Sustain. Energy 2014, 5, 434–445. [Google Scholar] [CrossRef]
- Abdelaziz, M.M.; El-Saadany, E. Economic droop parameter selection for autonomous microgrids including wind turbines. Renew. Energy 2015, 82, 108–113. [Google Scholar] [CrossRef]
- Chen, C.; Duan, S.; Cai, T.; Liu, B.; Hu, G. Optimal Allocation and Economic Analysis of Energy Storage System in Microgrids. IEEE Trans. Power Electron. 2011, 26, 2762–2773. [Google Scholar] [CrossRef]
- Awad, A.S.A.; El-Fouly, T.; Salama, M.M.A. Optimal ESS Allocation and Load Shedding for Improving Distribution System Reliability. IEEE Trans. Smart Grid 2014, 5, 2339–2349. [Google Scholar] [CrossRef]
- Sun, Q.; Huang, B.; Li, D.; Ma, D.; Zhang, Y. Optimal Placement of Energy Storage Devices in Microgrids via Structure Preserving Energy Function. IEEE Trans. Ind. Inform. 2016, 12, 1166–1179. [Google Scholar] [CrossRef]
- Gazijahani, F.S.; Salehi, J. Stochastic multi-objective framework for optimal dynamic planning of interconnected microgrids. IET Renew. Power Gener. 2017, 11, 1749–1759. [Google Scholar] [CrossRef]
- Uniyal, A.; Sarangi, S. Optimal allocation of ELC in microgrid using droop controlled load flow. IET Gener. Transm. Distrib. 2019, 13, 4566–4578. [Google Scholar] [CrossRef]
- Uniyal, A.; Sarangi, S.; Kala, H. Optimal dump load allocation to regulate voltage and frequency in microgrid. In Proceedings of the 2019 8th International Conference on Power Systems (ICPS), Jaipur, India, 20–22 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Uniyal, A.; Sarangi, S.; Rawat, M.S. Optimal Dump Load Allocations in High RBDG Penetrated Microgrid for Voltage and Frequency Regulation. Arab. J. Sci. Eng. 2021, 46, 1511–1528. [Google Scholar] [CrossRef]
- Maleki, A.; Khajeh, M.G.; Ameri, M. Optimal sizing of a grid independent hybrid renewable energy system incorporating resource uncertainty, and load uncertainty. Int. J. Electr. Power Energy Syst. 2016, 83, 514–524. [Google Scholar] [CrossRef]
- Moradi, M.H.; Abedini, M.; Hosseinian, S.M. Optimal operation of autonomous microgrid using HS–GA. Int. J. Electr. Power Energy Syst. 2016, 77, 210–220. [Google Scholar] [CrossRef]
- Goodarzi, H.M.; Kazemi, M.H. A Novel Optimal Control Method for Islanded Microgrids Based on Droop Control Using the ICA-GA Algorithm. Energies 2017, 10, 485. [Google Scholar] [CrossRef]
- Foroutan, V.B.; Moradi, M.H.; Abedini, M. Optimal operation of autonomous microgrid including wind turbines. Renew. Energy 2016, 99, 315–324. [Google Scholar] [CrossRef]
- Dheer, D.K.; Soni, N.; Doolla, S. Improvement of small signal stability margin and transient response in inverter-dominated microgrids. Sustain. Energy Grids Netw. 2016, 5, 135–147. [Google Scholar] [CrossRef]
- Uniyal, A.; Sarangi, S.; Kala, H. Droop based DG allocation in weakly meshed autonomous microgrid. In Proceedings of the 2019 8th International Conference on Power Systems (ICPS), Jaipur, India, 20–22 December 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Gupta, Y.; Doolla, S.; Chatterjee, K.; Pal, B.C. Optimal DG Allocation and Volt–Var Dispatch for a Droop-Based Microgrid. IEEE Trans. Smart Grid 2021, 12, 169–181. [Google Scholar] [CrossRef]
- Gupta, Y.; Nellikkath, R.; Chatterjee, K.; Doolla, S. Volt–Var Optimization and Reconfiguration: Reducing Power Demand and Losses in a Droop-Based Microgrid. IEEE Trans. Ind. Appl. 2021, 57, 2769–2781. [Google Scholar] [CrossRef]
- Dzamarija, M.; Keane, A. Autonomous Curtailment Control in Distributed Generation Planning. IEEE Trans. Smart Grid 2015, 7, 1337–1345. [Google Scholar] [CrossRef]
- Guo, L.; Wang, N.; Lu, H.; Li, X.; Wang, C. Multi-objective optimal planning of the stand-alone microgrid system based on different benefit subjects. Energy 2016, 116, 353–363. [Google Scholar] [CrossRef]
- Goodarzi, H.M.; Kazemi, M.H. An optimal autonomous microgrid cluster based on distributed generation droop parameter optimization and renewable energy sources using an improved grey wolf optimizer. Eng. Optim. 2017, 50, 819–839. [Google Scholar] [CrossRef]
- Abdelaziz, M.; Farag, H.E.; El-Saadany, E.F. Optimum Reconfiguration of Droop-Controlled Islanded Microgrids. IEEE Trans. Power Syst. 2015, 31, 2144–2153. [Google Scholar] [CrossRef]
- Hemmatpour, M.H.; Mohammadian, M.; Gharaveisi, A.A. Optimum islanded microgrid reconfiguration based on maximization of system loadability and minimization of power losses. Int. J. Electr. Power Energy Syst. 2016, 78, 343–355. [Google Scholar] [CrossRef]
- Zhan, X.; Xiang, T.; Chen, H.; Zhou, B.; Yang, Z. Vulnerability assessment and reconfiguration of microgrid through search vector artificial physics optimization algorithm. Int. J. Electr. Power Energy Syst. 2014, 62, 679–688. [Google Scholar] [CrossRef]
- Gholami, A.; Sun, X.A. Towards Resilient Operation of Multimicrogrids: An MISOCP-Based Frequency-Constrained Approach. IEEE Trans. Control. Netw. Syst. 2018, 6, 925–936. [Google Scholar] [CrossRef] [Green Version]
- Niknam, T.; Kavousifard, A.; Aghaei, J. Scenario-based multiobjective distribution feeder reconfiguration considering wind power using adaptive modified particle swarm optimisation. IET Renew. Power Gener. 2012, 6, 236–247. [Google Scholar] [CrossRef]
- Mohamed, M.Z.; Saxena, S.; Farag, H.E. Optimal Design of Islanded Microgrids Considering Distributed Dynamic State Estimation. IEEE Trans. Ind. Inform. 2020, 17, 1. [Google Scholar] [CrossRef]
- Dheer, D.K.; Kulkarni, O.V.; Doolla, S.; Rathore, A.K. Effect of Reconfiguration and Meshed Networks on the Small-Signal Stability Margin of Droop-Based Islanded Microgrids. IEEE Trans. Ind. Appl. 2018, 54, 2821–2833. [Google Scholar] [CrossRef]
- Mukhopadhyay, B.; Das, D. Optimal multi-objective expansion planning of a droop-regulated islanded microgrid. Energy 2021, 218, 119415. [Google Scholar] [CrossRef]
- Divshali, P.H.; Hosseinian, S.H.; Abedi, M. A novel multi-stage fuel cost minimization in a VSC-based microgrid considering stability, frequency, and voltage constraints. IEEE Trans. Power Syst. 2012, 28, 931–939. [Google Scholar] [CrossRef]
- Elrayyah, A.; Cingoz, F.; Sozer, Y. Construction of Nonlinear Droop Relations to Optimize Islanded Microgrid Operation. IEEE Trans. Ind. Appl. 2015, 51, 3404–3413. [Google Scholar] [CrossRef]
- Barklund, E.; Pogaku, N.; Prodanovic, M.; Hernandez-Aramburo, C.; Green, T. Energy Management in Autonomous Microgrid Using Stability-Constrained Droop Control of Inverters. IEEE Trans. Power Electron. 2008, 23, 2346–2352. [Google Scholar] [CrossRef] [Green Version]
- Marzband, M.; Azarinejadian, F.; Savaghebi, M.; Guerrero, J. An Optimal Energy Management System for Islanded Microgrids Based on Multiperiod Artificial Bee Colony Combined with Markov Chain. IEEE Syst. J. 2017, 11, 1712–1722. [Google Scholar] [CrossRef] [Green Version]
- Rezaei, N.; Mazidi, M.; Gholami, M.; Mohiti, M. A new stochastic gain adaptive energy management system for smart microgrids considering frequency responsive loads. Energy Rep. 2020, 6, 914–932. [Google Scholar] [CrossRef]
- Khaledian, A.; Ahmadian, A.; Golkar, M.A. Optimal droop gains assignment for real-time energy management in an islanding microgrid: A two-layer techno-economic approach. IET Gener. Transm. Distrib. 2017, 11, 2292–2304. [Google Scholar] [CrossRef]
- Marzband, M.; Yousefnejad, E.; Sumper, A.; Domínguez-García, J.L. Real time experimental implementation of optimum energy management system in standalone Microgrid by using multi-layer ant colony optimization. Int. J. Electr. Power Energy Syst. 2016, 75, 265–274. [Google Scholar] [CrossRef] [Green Version]
- Marzband, M.; Parhizi, N.; Savaghebi, M.; Guerrero, J. Distributed Smart Decision-Making for a Multimicrogrid System Based on a Hierarchical Interactive Architecture. IEEE Trans. Energy Convers. 2015, 31, 637–648. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Duan, S. Optimal allocation of distributed generation and energy storage system in microgrids. IET Renew. Power Gener. 2014, 8, 581–589. [Google Scholar] [CrossRef] [Green Version]
- Vergara, P.P.; López, J.C.; Rider, M.J.; Shaker, H.R.; da Silva, L.C.; Jørgensen, B.N. A stochastic programming model for the optimal operation of unbalanced three-phase islanded microgrids. Int. J. Electr. Power Energy Syst. 2020, 115, 105446. [Google Scholar] [CrossRef]
- Gao, Y.; Ai, Q. A distributed coordinated economic droop control scheme for islanded AC microgrid considering communication system. Electr. Power Syst. Res. 2018, 160, 109–118. [Google Scholar] [CrossRef]
- Olivares, D.E.; Canizares, C.A.; Kazerani, M. A Centralized Energy Management System for Isolated Microgrids. IEEE Trans. Smart Grid 2014, 5, 1864–1875. [Google Scholar] [CrossRef]
- Xu, Y.; Li, Z. Distributed Optimal Resource Management Based on the Consensus Algorithm in a Microgrid. IEEE Trans. Ind. Electron. 2014, 62, 2584–2592. [Google Scholar] [CrossRef]
- de Azevedo, R.; Cintuglu, M.H.; Ma, T.; Mohammed, O.A. Multiagent-Based Optimal Microgrid Control Using Fully Distributed Diffusion Strategy. IEEE Trans. Smart Grid 2017, 8, 1997–2008. [Google Scholar] [CrossRef]
- Liu, D.; Zhang, C.; Dong, Z. Stochastic Optimal Power Flow for Islanded Microgrids Considering Droop Control. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies—Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 3156–3161. [Google Scholar] [CrossRef]
- Liu, Z.; Yang, J.; Zhang, Y.; Ji, T.; Zhou, J.; Cai, Z. Multi-Objective Coordinated Planning of Active-Reactive Power Resources for Decentralized Droop-Controlled Islanded Microgrids Based on Probabilistic Load Flow. IEEE Access 2018, 6, 40267–40280. [Google Scholar] [CrossRef]
- Chen, G.; Li, Z.; Zhao, Z. Event-Triggered Optimal Active Power Control in Islanded Microgrid with Variable Demand and Time-Varying Communication Topology. IEEE Trans. Smart Grid 2019, 10, 4015–4025. [Google Scholar] [CrossRef]
- Cingoz, F.; Elrayyah, A.; Sozer, Y. Plug-and-Play Nonlinear Droop Construction Scheme to Optimize Islanded Microgrid Operations. IEEE Trans. Power Electron. 2017, 32, 2743–2756. [Google Scholar] [CrossRef]
- Ahn, S.-J.; Nam, S.-R.; Choi, J.-H.; Moon, S.-I. Power Scheduling of Distributed Generators for Economic and Stable Operation of a Microgrid. IEEE Trans. Smart Grid 2013, 4, 398–405. [Google Scholar] [CrossRef]
- Chen, F.; Chen, M.; Li, Q.; Meng, K.; Zheng, Y.; Guerrero, J.; Abbott, D. Cost-Based Droop Schemes for Economic Dispatch in Islanded Microgrids. IEEE Trans. Smart Grid 2016, 8, 63–74. [Google Scholar] [CrossRef] [Green Version]
- Manna, D.; Goswami, S.K.; Chattopadhyay, P.K. Jadavpur University Droop control for micro-grid operations including generation cost and demand side management. CSEE J. Power Energy Syst. 2017, 3, 232–242. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, W.; Zhang, B. A Fully Distributed Power Dispatch Method for Fast Frequency Recovery and Minimal Generation Cost in Autonomous Microgrids. IEEE Trans. Smart Grid 2016, 7, 19–31. [Google Scholar] [CrossRef]
- Marzband, M.; Sumper, A.; Domínguez-García, J.L.; Gumara-Ferret, R. Experimental validation of a real time energy management system for microgrids in islanded mode using a local day-ahead electricity market and MINLP. Energy Convers. Manag. 2013, 76, 314–322. [Google Scholar] [CrossRef]
- Niknam, T.; Azizipanah-Abarghooee, R.; Narimani, M.R. An efficient scenario-based stochastic programming framework for multi-objective optimal micro-grid operation. Appl. Energy 2012, 99, 455–470. [Google Scholar] [CrossRef]
- Conti, S.; Nicolosi, R.; Rizzo, S.A.; Zeineldin, H.H. Optimal Dispatching of Distributed Generators and Storage Systems for MV Islanded Microgrids. IEEE Trans. Power Deliv. 2012, 27, 1243–1251. [Google Scholar] [CrossRef]
- Basu, A.K.; Bhattacharya, A.; Chowdhury, S. Planned Scheduling for Economic Power Sharing in a CHP-Based Micro-Grid. IEEE Trans. Power Syst. 2011, 27, 30–38. [Google Scholar] [CrossRef]
- Jithendranath, J.; Das, D.; Guerrero, J.M. Probabilistic optimal power flow in islanded microgrids with load, wind and solar uncertainties including intermittent generation spatial correlation. Energy 2021, 222, 119847. [Google Scholar] [CrossRef]
- Deckmyn, C.; VanDoorn, T.L.; Van De Vyver, J.; Desmet, J.; Vandevelde, L. A Microgrid Multilayer Control Concept for Optimal Power Scheduling and Voltage Control. IEEE Trans. Smart Grid 2017, 9, 4458–4467. [Google Scholar] [CrossRef]
- Jiang, Q.; Xue, M.; Geng, G. Energy Management of Microgrid in Grid-Connected and Stand-Alone Modes. IEEE Trans. Power Syst. 2013, 28, 3380–3389. [Google Scholar] [CrossRef]
- Youssef, K.H. Power Quality Constrained Optimal Management of Unbalanced Smart Microgrids During Scheduled Multiple Transitions Between Grid-Connected and Islanded Modes. IEEE Trans. Smart Grid 2016, 8, 457–464. [Google Scholar] [CrossRef]
- Khodaei, A. Microgrid Optimal Scheduling with Multi-Period Islanding Constraints. IEEE Trans. Power Syst. 2013, 29, 1383–1392. [Google Scholar] [CrossRef]
- Abedini, M.; Abedini, M. Optimizing energy management and control of distributed generation resources in islanded microgrids. Util. Policy 2017, 48, 32–40. [Google Scholar] [CrossRef]
- Agundis-Tinajero, G.; Aldana, N.L.D.; Luna, A.C.; Segundo-Ramirez, J.; Visairo-Cruz, N.; Guerrero, J.M.; Vazquez, J.C. Extended-Optimal-Power-Flow-Based Hierarchical Control for Islanded AC Microgrids. IEEE Trans. Power Electron. 2018, 34, 840–848. [Google Scholar] [CrossRef]
- Abdelaziz, M.M.A.; El-Saadany, E.F. Determination of worst case loading margin of droop-controlled islanded microgrids. In Proceedings of the 2013 3rd International Conference on Electric Power and Energy Conversion Systems, Istanbul, Turkey, 2–4 October 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, X.; Du, Y.; Su, J.; Chang, L.; Shi, Y.; Lai, J. An Optimal Secondary Voltage Control Strategy for an Islanded Multibus Microgrid. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1236–1246. [Google Scholar] [CrossRef]
- ESanseverino, E.R.; Nguyen, N.Q.; Di Silvestre, M.L.; Zizzo, G.; De Bosio, F.; Tran, Q.T.T. Frequency constrained optimal power flow based on glow-worm swarm optimization in islanded microgrids. In Proceedings of the 2015 AEIT International Annual Conference (AEIT), Naples, Italy, 14–16 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Sanseverino, E.R.; Quang, N.N.; Di Silvestre, M.L.; Guerrero, J.; Li, C. Optimal power flow in three-phase islanded microgrids with inverter interfaced units. Electr. Power Syst. Res. 2015, 123, 48–56. [Google Scholar] [CrossRef] [Green Version]
- Abdelaziz, M.; El-Saadany, E.F. Maximum loadability consideration in droop-controlled islanded microgrids optimal power flow. Electr. Power Syst. Res. 2014, 106, 168–179. [Google Scholar] [CrossRef]
- Abdelaziz, M.; El-Saadany, E.F.; Seethapathy, R. Assessment of droop-controlled islanded microgrid maximum loadability. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Díaz, G. Maximum loadability of droop regulated microgrids—Formulation and analysis. IET Gener. Transm. Distrib. 2013, 7, 175–182. [Google Scholar] [CrossRef]
- Shariatzadeh, F.; Vellaithurai, C.B.; Biswas, S.S.; Zamora, R.; Srivastava, A.K. Real-Time Implementation of Intelligent Reconfiguration Algorithm for Microgrid. IEEE Trans. Sustain. Energy 2014, 5, 598–607. [Google Scholar] [CrossRef]
- Li, J.; Liu, Y.; Wu, L. Optimal Operation for Community Based Multi-Party Microgrid in Grid-Connected and Islanded Modes. IEEE Trans. Smart Grid 2016, 9, 1. [Google Scholar] [CrossRef]
- Khodaei, A. Resiliency-Oriented Microgrid Optimal Scheduling. IEEE Trans. Smart Grid 2014, 5, 1584–1591. [Google Scholar] [CrossRef]
- Rezaei, N.; Kalantar, M. Stochastic frequency-security constrained energy and reserve management of an inverter interfaced islanded microgrid considering demand response programs. Int. J. Electr. Power Energy Syst. 2015, 69, 273–286. [Google Scholar] [CrossRef]
- Rezaei, N.; Kalantar, M. Economic–environmental hierarchical frequency management of a droop-controlled islanded microgrid. Energy Convers. Manag. 2014, 88, 498–515. [Google Scholar] [CrossRef]
- Mazidi, M.; Rezaei, N.; Ardakani, F.J.; Mohiti, M.; Guerrero, J. A hierarchical energy management system for islanded multi-microgrid clusters considering frequency security constraints. Int. J. Electr. Power Energy Syst. 2020, 121, 106134. [Google Scholar] [CrossRef]
- Rezaei, N.; Ahmadi, A.; Khazali, A.H.; Guerrero, J.M. Energy and Frequency Hierarchical Management System Using Information Gap Decision Theory for Islanded Microgrids. IEEE Trans. Ind. Electron. 2018, 65, 7921–7932. [Google Scholar] [CrossRef] [Green Version]
- Chung, I.-Y.; Liu, W.; Cartes, D.A.; Collins, E.G.; Moon, S.-I. Control Methods of Inverter-Interfaced Distributed Generators in a Microgrid System. IEEE Trans. Ind. Appl. 2010, 46, 1078–1088. [Google Scholar] [CrossRef]
- Chung, I.-Y.; Liu, W.; Cartes, D.A.; Schoder, K. Control parameter optimization for a microgrid system using particle swarm optimization. In Proceedings of the 2008 IEEE International Conference on Sustainable Energy Technologies, Singapore, Singapore, 12–15 October 2008; pp. 837–842. [Google Scholar] [CrossRef]
- Mohammadi, S.; Soleymani, S.; Mozafari, B. Scenario-based stochastic operation management of MicroGrid including Wind, Photovoltaic, Micro-Turbine, Fuel Cell and Energy Storage Devices. Int. J. Electr. Power Energy Syst. 2014, 54, 525–535. [Google Scholar] [CrossRef]
- Brown, P.D.; Lopes, J.A.P.; Matos, M. Optimization of Pumped Storage Capacity in an Isolated Power System with Large Renewable Penetration. IEEE Trans. Power Syst. 2008, 23, 523–531. [Google Scholar] [CrossRef]
- Nutkani, I.U.; Loh, P.C.; Wang, P.; Blaabjerg, F. Linear Decentralized Power Sharing Schemes for Economic Operation of AC Microgrids. IEEE Trans. Ind. Electron. 2016, 63, 225–234. [Google Scholar] [CrossRef]
- Yan, B.; Wang, B.; Tang, F.; Liu, D.; Ma, Z.; Shao, Y. Development of Economic and Stable Power-Sharing Scheme in an Autonomous Microgrid with Volatile Wind Power Generation. Electr. Power Components Syst. 2014, 42, 1313–1323. [Google Scholar] [CrossRef]
- El-Bidairi, K.S.; Nguyen, H.D.; Mahmoud, T.S.; Jayasinghe, S.; Guerrero, J.M. Optimal sizing of Battery Energy Storage Systems for dynamic frequency control in an islanded microgrid: A case study of Flinders Island, Australia. Energy 2020, 195, 117059. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R.C.; Shi, Y. Swarm Intelligence; Morgan Kaufmann: San Mateo, CA, USA, 2001. [Google Scholar]







| Reference | Optimization Elements | Mode of Operation | Optimization Problem | MG Type | Supervisory Control | Optimal DCIMG | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Ob | Co | Var | Alg | MO | Isd | GC | Al | Dis | Re | Cnt | EMS | Pro | AC | DC | Cen | Dec | ||
| [1] | Y | Y | N | Y | Y | N | N | Y | N | N | N | Y | N | Y | N | N | N | N |
| [2] | Y | Y | Y | Y | Y | N | Y | Y | N | N | N | N | N | Y | N | N | N | N |
| [3] | N | N | N | N | N | Y | Y | N | N | N | Y | Y | Y | N | N | Y | Y | N |
| [4] | N | N | Y | Y | Y | N | Y | Y | Y | N | N | Y | N | Y | N | N | N | N |
| [5] | Y | Y | Y | Y | Y | N | Y | Y | N | N | N | N | N | Y | N | N | N | N |
| [6] | N | N | N | Y | Y | N | Y | N | Y | N | N | Y | N | Y | N | N | N | N |
| [7] | Y | N | Y | Y | Y | N | Y | Y | Y | N | Y | Y | N | Y | N | Y | Y | N |
| [8] | Y | Y | N | Y | Y | N | Y | Y | N | Y | N | N | N | Y | N | N | N | N |
| [9] | Y | Y | N | Y | Y | N | Y | Y | N | N | N | N | Y | Y | N | N | N | N |
| [10] | Y | N | N | Y | N | N | Y | Y | N | N | N | N | Y | Y | N | N | N | N |
| [11] | N | N | N | N | N | Y | Y | N | N | N | Y | N | N | Y | N | Y | Y | N |
| [12] | Y | N | N | N | Y | N | Y | N | Y | N | N | Y | Y | N | N | N | N | N |
| [13] | N | N | N | Y | N | Y | Y | N | N | N | N | N | N | Y | Y | N | N | N |
| [14] | N | N | N | N | N | Y | N | N | Y | N | N | Y | N | Y | N | N | N | N |
| [15] | N | N | N | Y | Y | Y | Y | N | N | N | N | Y | N | Y | Y | Y | Y | N |
| [16] | Y | N | N | Y | Y | N | Y | Y | Y | N | Y | Y | N | Y | N | N | N | N |
| [17] | Y | Y | Y | Y | Y | N | Y | Y | N | N | N | N | N | Y | Y | Y | Y | N |
| [18] | Y | Y | Y | Y | Y | N | Y | N | N | N | Y | Y | N | Y | N | N | N | N |
| [19] | N | N | N | N | N | Y | Y | N | N | N | Y | N | Y | Y | Y | Y | Y | N |
| [20] | N | N | N | Y | Y | N | Y | Y | N | N | N | Y | N | Y | N | N | N | N |
| [21] | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | N | Y | N | Y | N | N | N | N |
| [22] | Y | N | Y | N | Y | N | N | Y | N | N | N | N | N | N | N | N | N | N |
| [23] | N | N | N | Y | Y | Y | Y | Y | N | N | N | N | N | Y | Y | N | N | N |
| Microgrid Type | Advantages | Disadvantages |
|---|---|---|
| AC Microgrids |
|
|
| DC Microgrids |
|
|
| AC/DC Microgrids |
|
|
| Control Methods | Advantages | Disadvantages |
|---|---|---|
| Centralized Control |
|
|
| Decentralized Control |
|
|
| Hybrid Control |
|
|
| Optimization Methods | Advantages | Disadvantages |
|---|---|---|
| Classical Methods |
|
|
| AI Methods |
|
|
| Hybrid Methods |
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kreishan, M.Z.; Zobaa, A.F. Optimal Allocation and Operation of Droop-Controlled Islanded Microgrids: A Review. Energies 2021, 14, 4653. https://doi.org/10.3390/en14154653
Kreishan MZ, Zobaa AF. Optimal Allocation and Operation of Droop-Controlled Islanded Microgrids: A Review. Energies. 2021; 14(15):4653. https://doi.org/10.3390/en14154653
Chicago/Turabian StyleKreishan, Maen Z., and Ahmed F. Zobaa. 2021. "Optimal Allocation and Operation of Droop-Controlled Islanded Microgrids: A Review" Energies 14, no. 15: 4653. https://doi.org/10.3390/en14154653
APA StyleKreishan, M. Z., & Zobaa, A. F. (2021). Optimal Allocation and Operation of Droop-Controlled Islanded Microgrids: A Review. Energies, 14(15), 4653. https://doi.org/10.3390/en14154653