
An Original Control Strategy of Storage Systems for the Frequency Stability of Autonomous Grids with Renewable Power Generation




Abstract
:1. Introduction
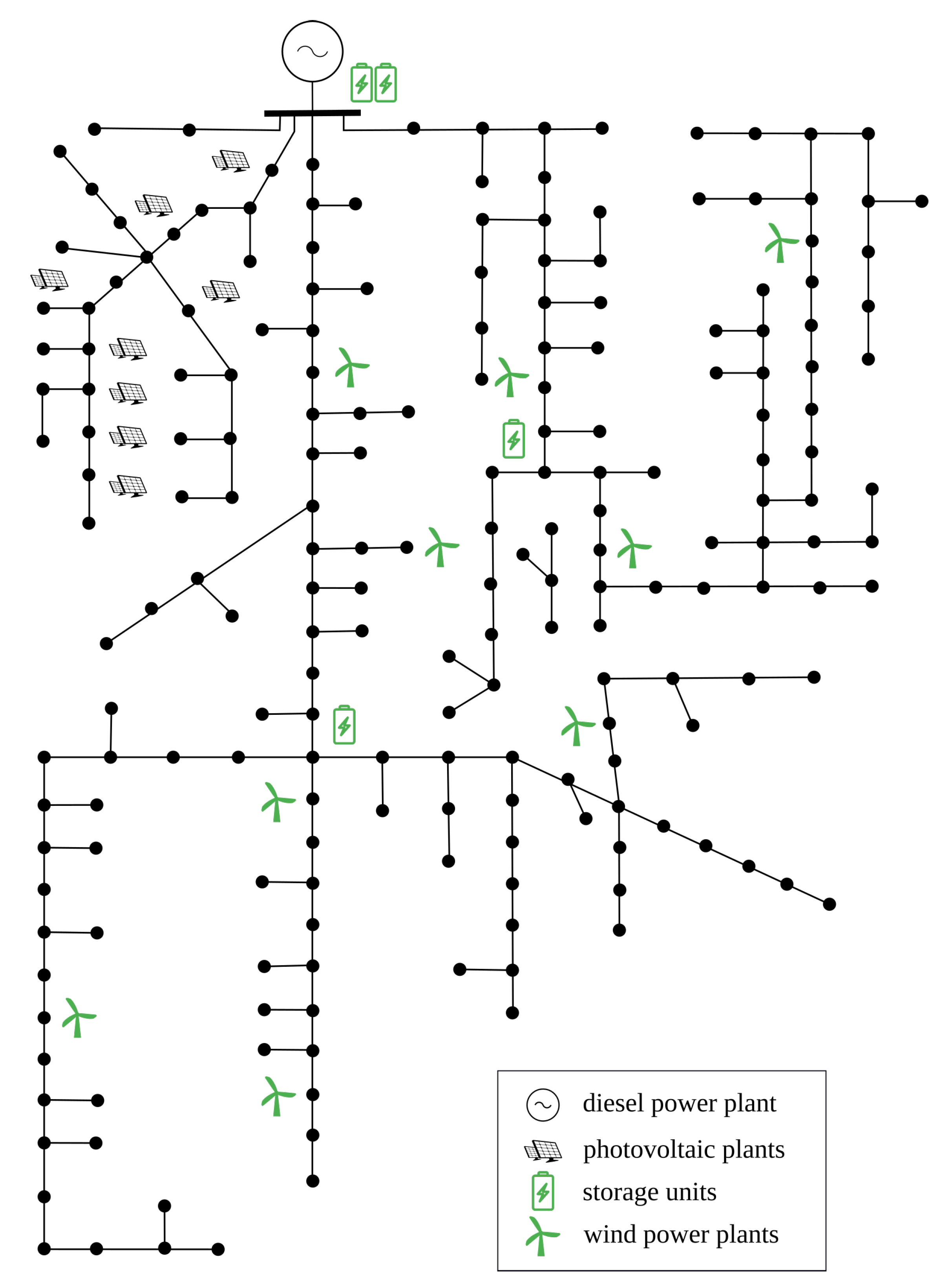
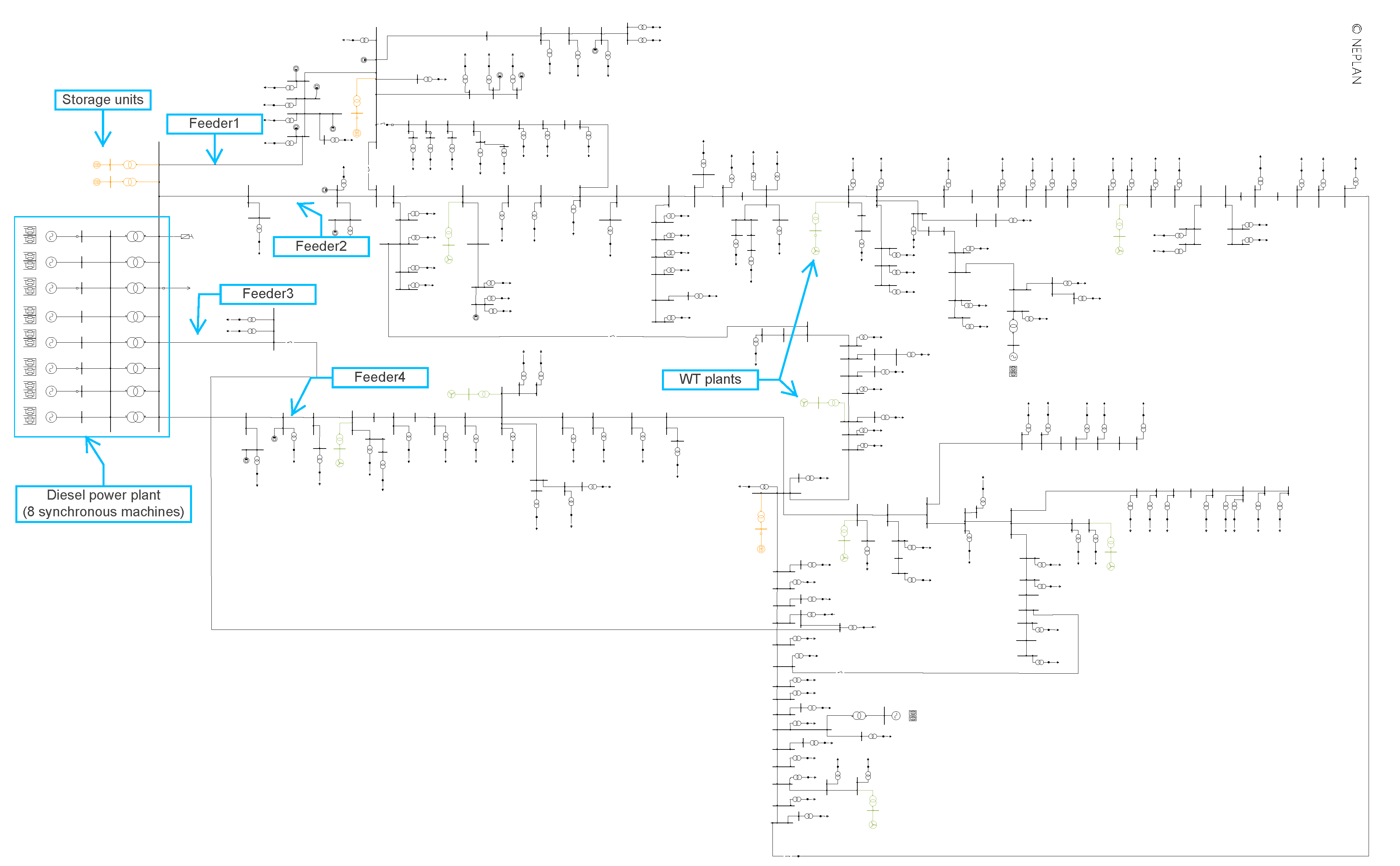
2. System Description and Scenarios
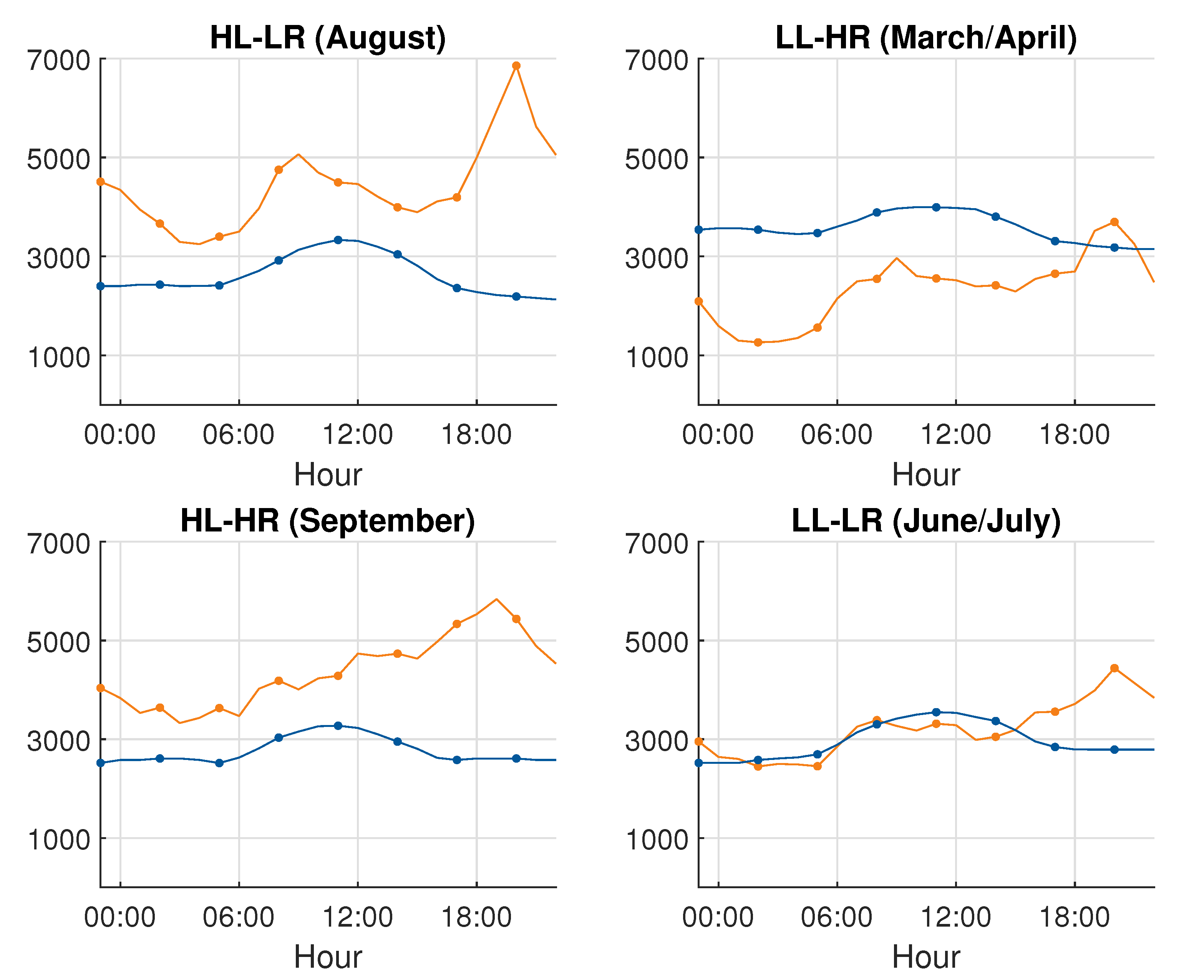
- high load demand and low RES generation: this condition can be representative of end of July/August, especially in the evening hours (Figure 4 top-left); the peak of the demand is, in fact, detected for the summer period, where the production from wind is typically low;
- low load demand and high RES generation: this condition can be instead associated with May/June and the beginning of July (Figure 4 bottom-right); in that period of the year, the power demand is still relatively low because the summer season is only beginning, with moderate tourist influx and mild temperatures;
- high load demand and high RES: after some further inspections of the available data, this condition is found for the month of September (Figure 4 bottom-left); the level of the load demand is a bit lower than the peaks observed in the summer period, but at that time, there is a significant increase of the generation from RES, due to the beginning of the windy period for the island;
- low load demand and high RES: this condition can be related to the period between March and April (Figure 4 top-right); in that season of the year, the power demand is, in fact, low, while the RES generation level is considerable due to the relatively high wind production.
- scenario HL-LR: when the load demand is high and the power generation from RES is low, all four storage units might be called to generate power, especially if the production from diesel is to be reduced; in this condition, the storage units could then all be operated in discharging mode;
- scenario LL-HR: when the load demand is high and the power generation from RES is low, the surplus of generation can be used to recharge the batteries of the storage units; in this condition, the storage units could then all be operated in charging mode;
- scenarios HL-HR and LL-LR: when load demand and RES generation are both high or low, the approximate balance between load and generation does not pose a priori constraints on the storage units; therefore, the operating conditions of the units can be managed depending on other factors, such as level of state of charge, grid management requirements and power smoothing; in these conditions, two storage units can then be operated in charging mode and two in discharging mode.
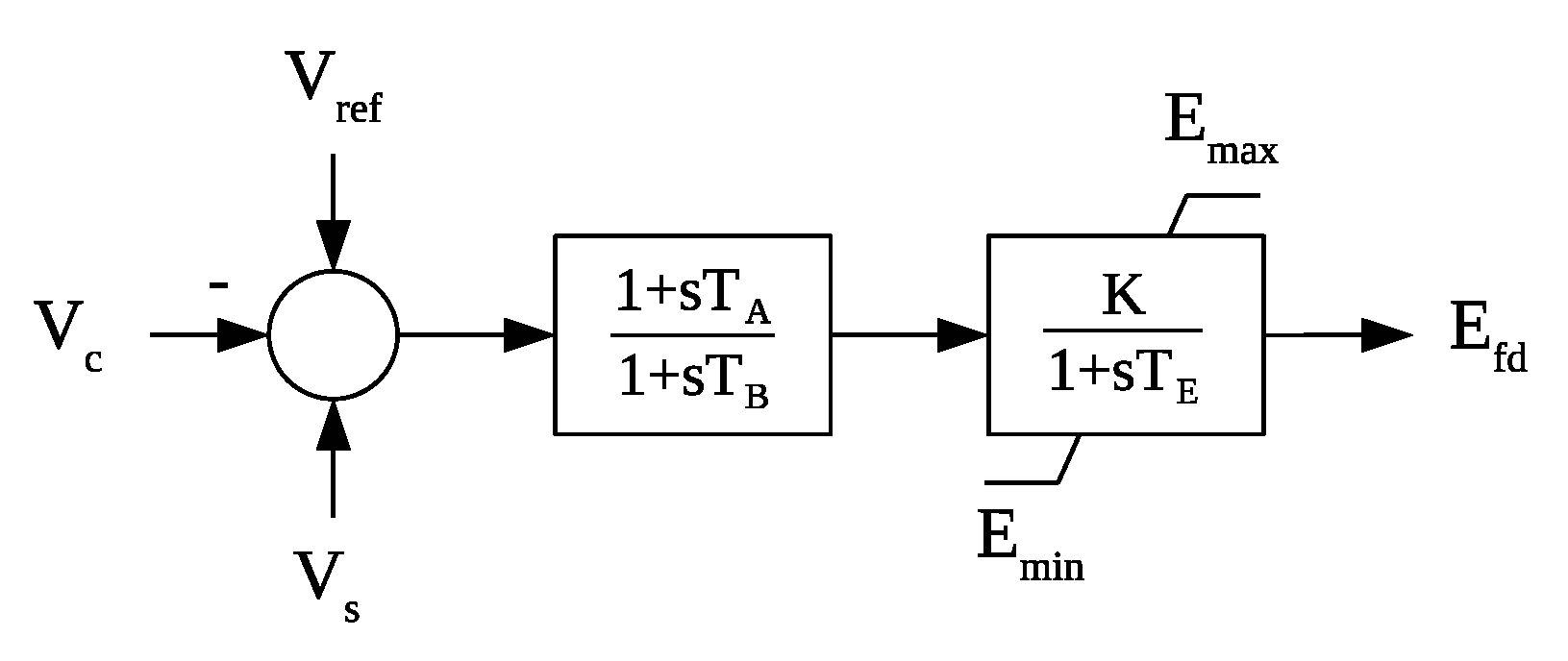
3. Implementation of Simulation Model
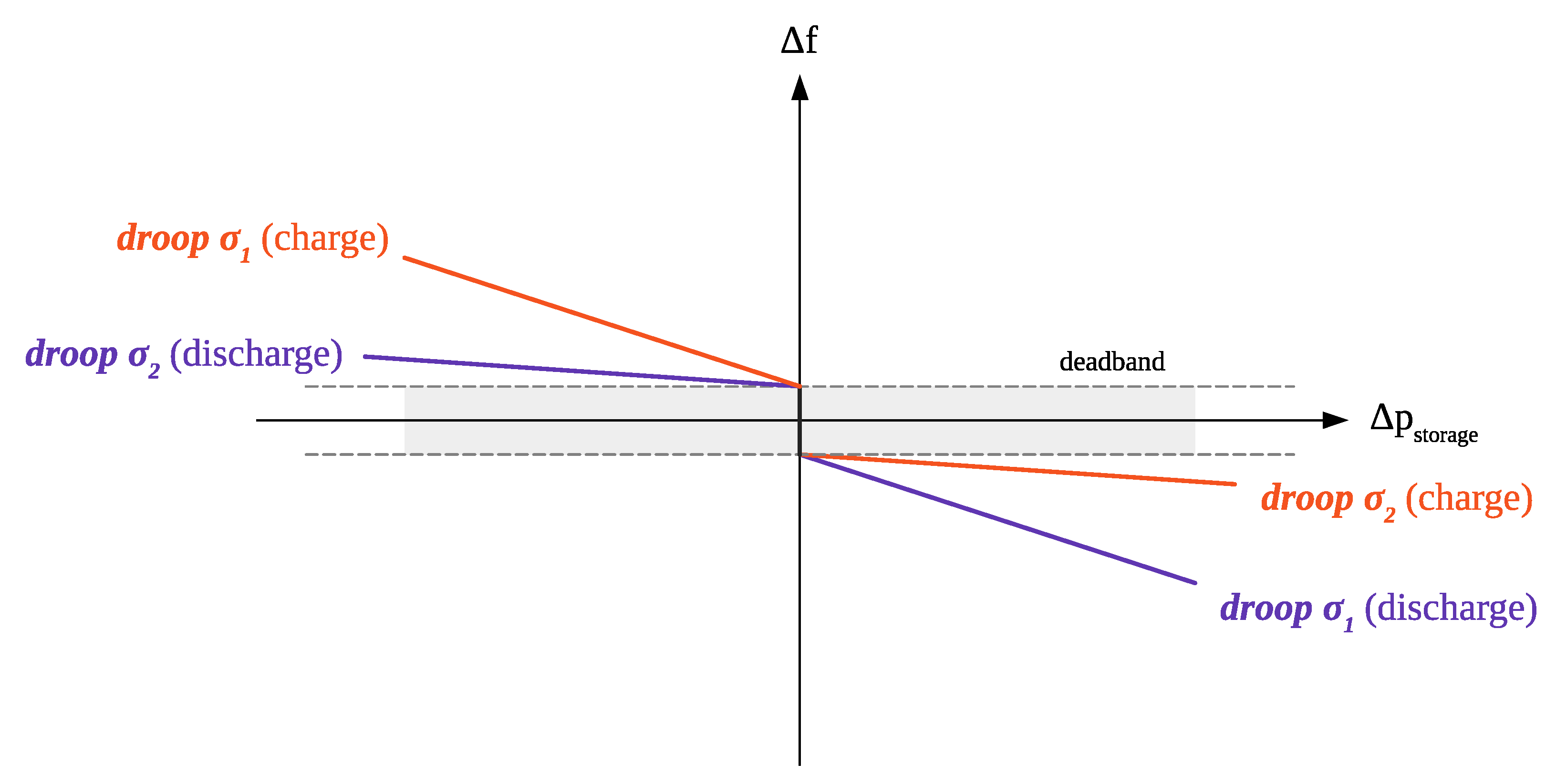
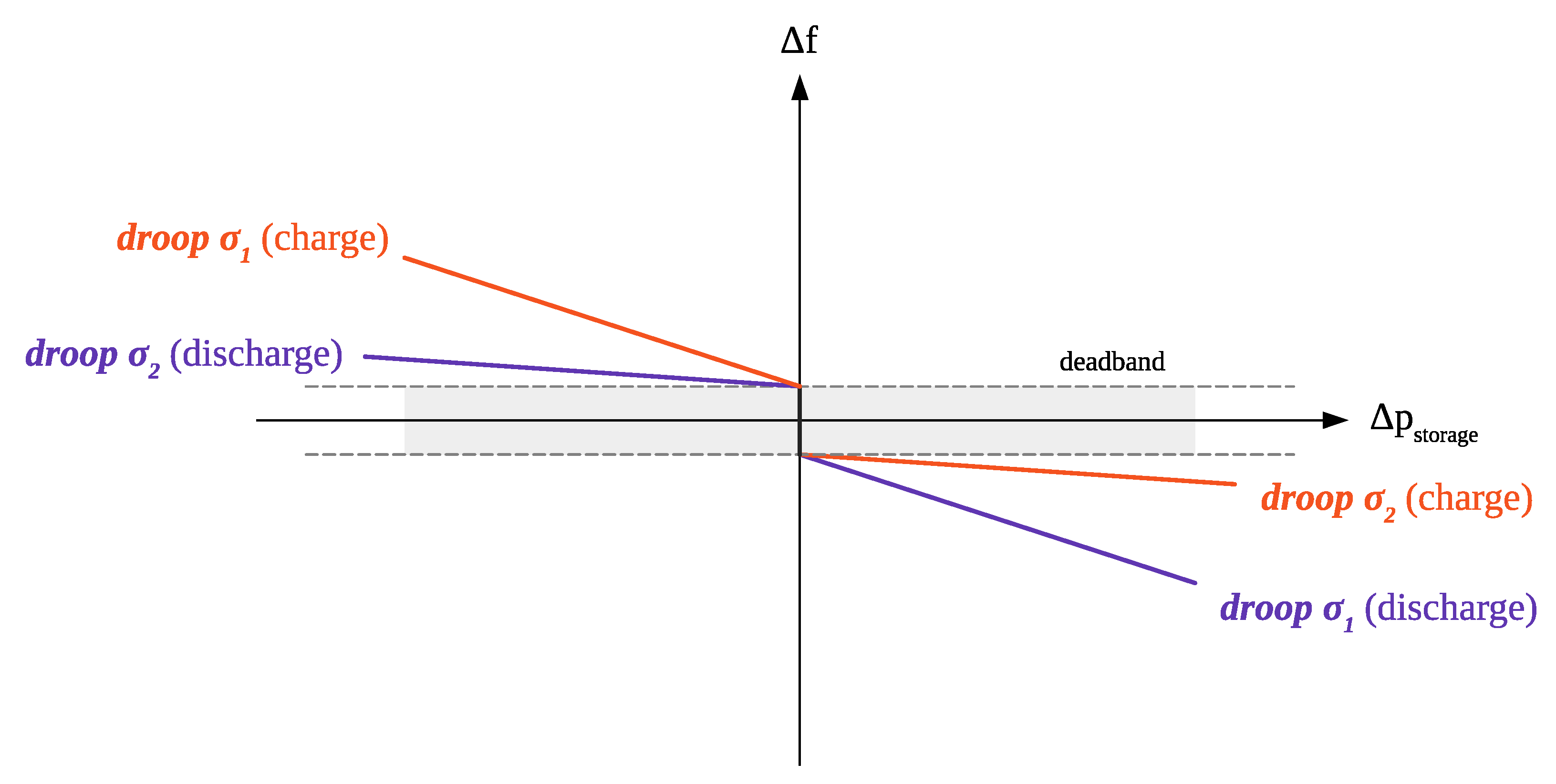
4. Extended Frequency Droop Control for Storage Units
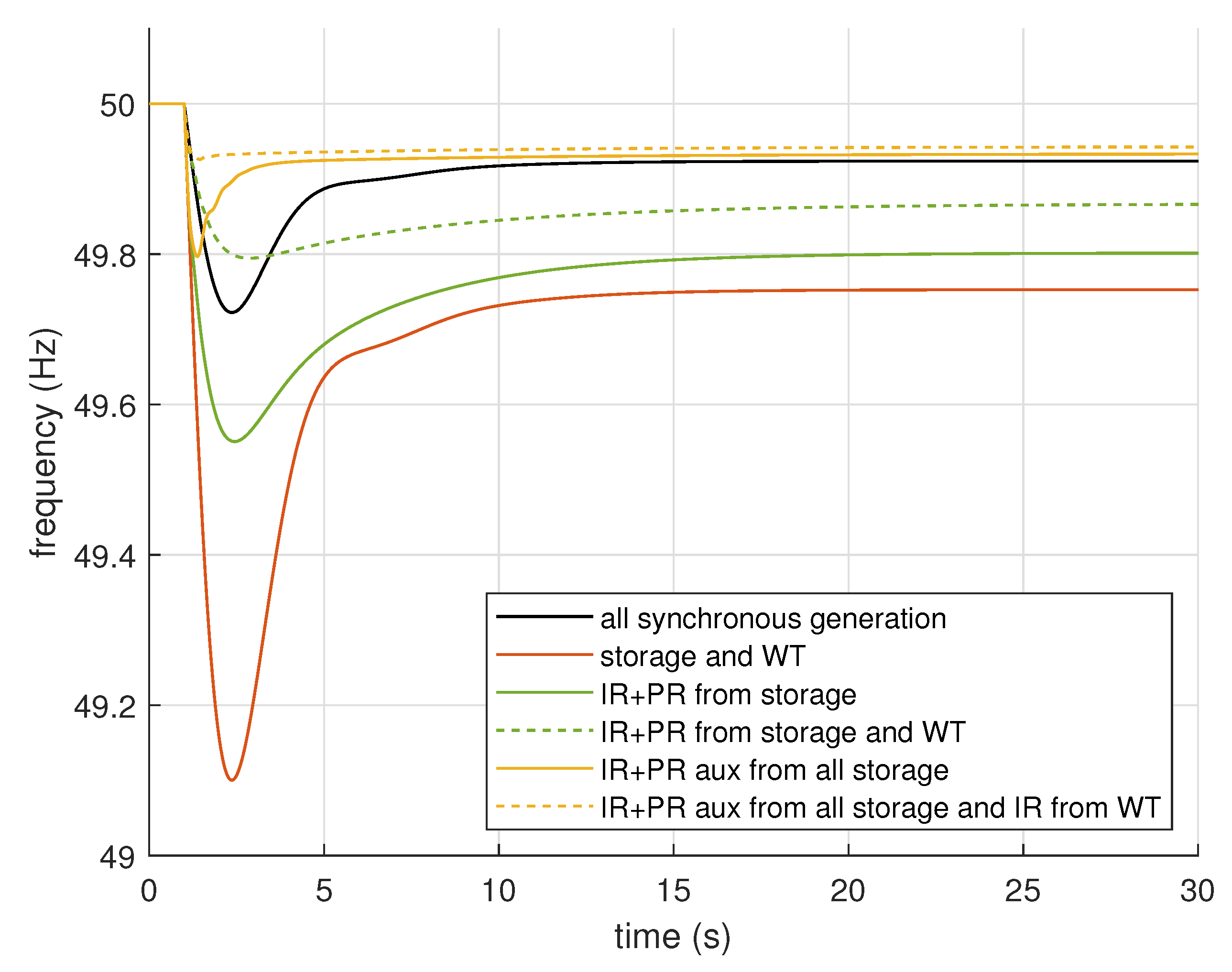
5. Simulation and Analysis
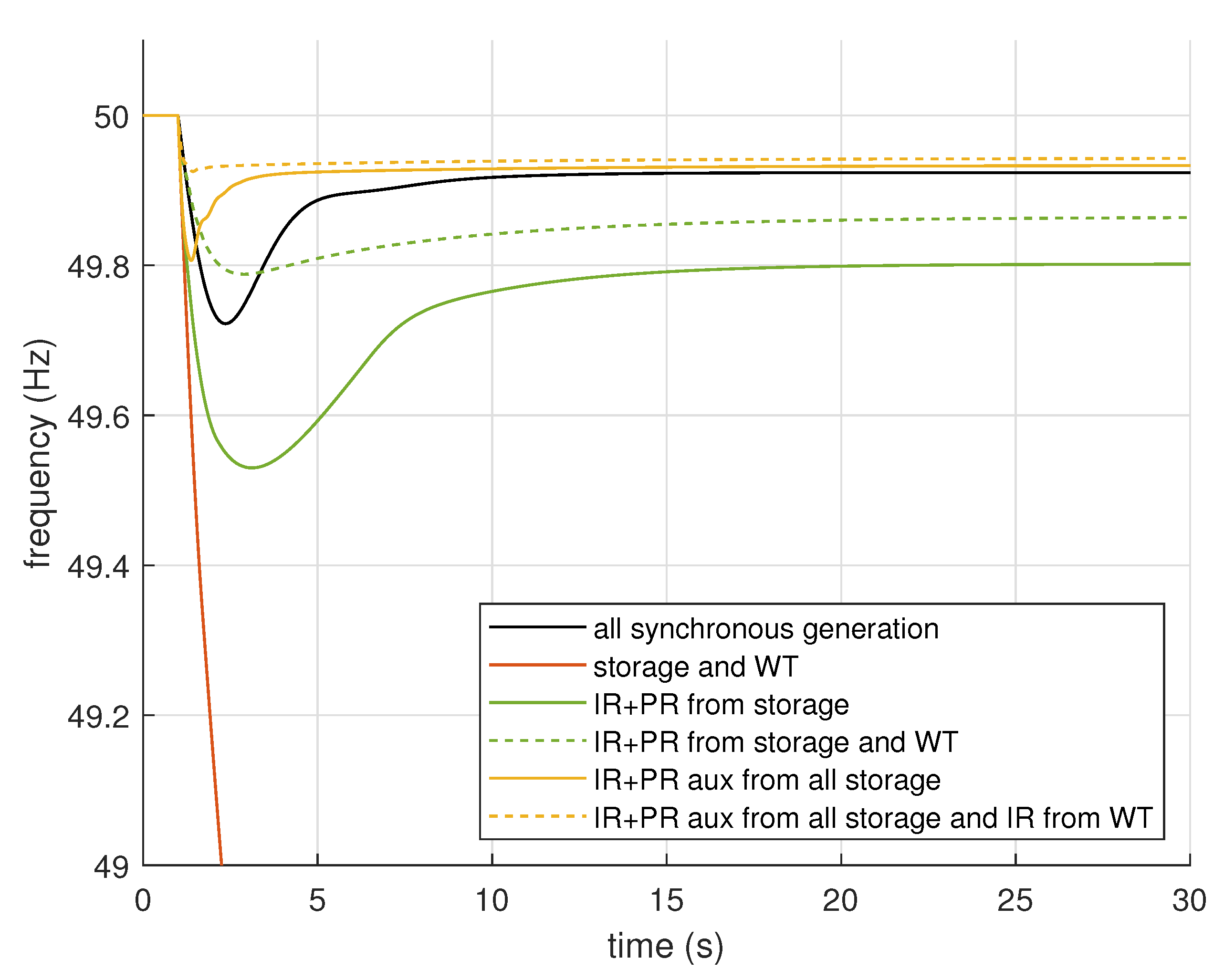
5.1. High Load and High RES
5.2. High Load and Low RES
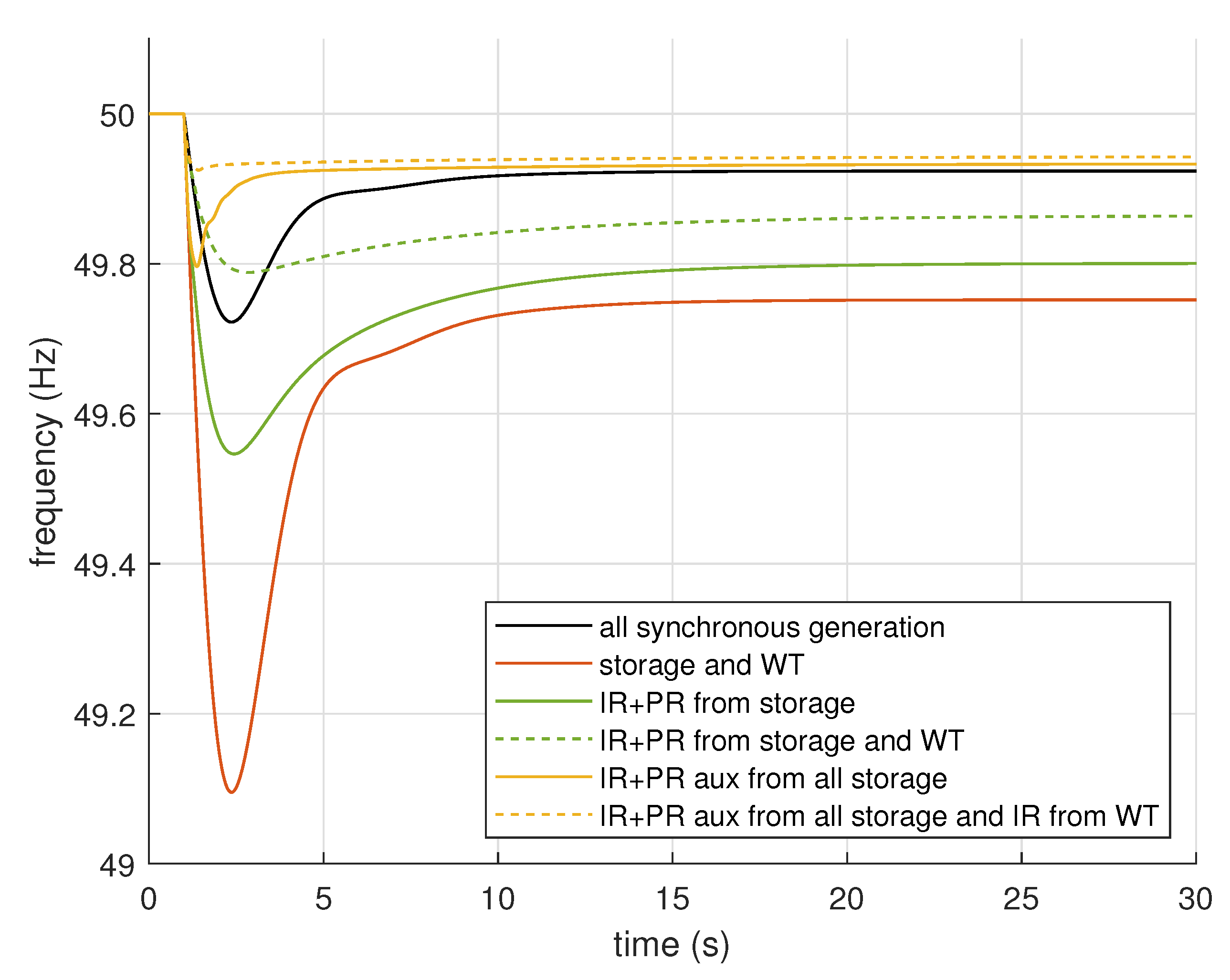
5.3. Low Load and High RES
5.4. Low Load and Low RES
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hour | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 01:00 | 0.96 | 0.92 | 0.94 | 0.94 | 0.86 | 0.67 | 0.62 | 0.63 | 0.67 | 0.70 | 0.90 | 0.89 |
| 02:00 | 0.94 | 0.94 | 0.94 | 0.94 | 0.87 | 0.67 | 0.62 | 0.63 | 0.68 | 0.69 | 0.87 | 0.88 |
| 03:00 | 0.92 | 0.94 | 0.94 | 0.94 | 0.86 | 0.67 | 0.63 | 0.64 | 0.68 | 0.68 | 0.86 | 0.88 |
| 04:00 | 0.94 | 0.94 | 0.94 | 0.94 | 0.84 | 0.68 | 0.63 | 0.64 | 0.69 | 0.68 | 0.86 | 0.88 |
| 05:00 | 0.95 | 0.94 | 0.94 | 0.92 | 0.83 | 0.69 | 0.63 | 0.63 | 0.69 | 0.69 | 0.85 | 0.89 |
| 06:00 | 0.95 | 0.94 | 0.94 | 0.91 | 0.81 | 0.69 | 0.63 | 0.63 | 0.68 | 0.69 | 0.85 | 0.89 |
| 07:00 | 0.94 | 0.94 | 0.95 | 0.90 | 0.79 | 0.68 | 0.60 | 0.62 | 0.66 | 0.68 | 0.86 | 0.88 |
| 08:00 | 0.93 | 0.94 | 0.97 | 0.89 | 0.80 | 0.68 | 0.59 | 0.60 | 0.63 | 0.67 | 0.86 | 0.87 |
| 09:00 | 0.91 | 0.92 | 0.98 | 0.87 | 0.79 | 0.69 | 0.57 | 0.58 | 0.63 | 0.67 | 0.85 | 0.87 |
| 10:00 | 0.90 | 0.91 | 0.97 | 0.86 | 0.79 | 0.68 | 0.57 | 0.58 | 0.63 | 0.66 | 0.85 | 0.86 |
| 11:00 | 0.90 | 0.90 | 0.96 | 0.84 | 0.79 | 0.67 | 0.59 | 0.60 | 0.63 | 0.66 | 0.85 | 0.86 |
| 12:00 | 0.90 | 0.89 | 0.96 | 0.83 | 0.79 | 0.67 | 0.60 | 0.60 | 0.64 | 0.66 | 0.84 | 0.87 |
| 13:00 | 0.90 | 0.89 | 0.97 | 0.82 | 0.80 | 0.68 | 0.62 | 0.62 | 0.64 | 0.66 | 0.83 | 0.87 |
| 14:00 | 0.90 | 0.90 | 0.98 | 0.83 | 0.81 | 0.69 | 0.62 | 0.63 | 0.64 | 0.67 | 0.83 | 0.87 |
| 15:00 | 0.89 | 0.90 | 0.96 | 0.85 | 0.82 | 0.70 | 0.62 | 0.63 | 0.64 | 0.67 | 0.83 | 0.89 |
| 16:00 | 0.87 | 0.90 | 0.96 | 0.86 | 0.83 | 0.72 | 0.63 | 0.63 | 0.65 | 0.68 | 0.84 | 0.90 |
| 17:00 | 0.87 | 0.90 | 0.98 | 0.87 | 0.85 | 0.73 | 0.64 | 0.63 | 0.67 | 0.69 | 0.86 | 0.90 |
| 18:00 | 0.87 | 0.90 | 1.00 | 0.88 | 0.86 | 0.73 | 0.65 | 0.63 | 0.67 | 0.71 | 0.87 | 0.90 |
| 19:00 | 0.88 | 0.90 | 0.99 | 0.87 | 0.85 | 0.74 | 0.66 | 0.62 | 0.68 | 0.71 | 0.89 | 0.90 |
| 20:00 | 0.88 | 0.90 | 0.98 | 0.87 | 0.87 | 0.74 | 0.67 | 0.60 | 0.69 | 0.71 | 0.90 | 0.90 |
| 21:00 | 0.88 | 0.90 | 0.97 | 0.85 | 0.87 | 0.74 | 0.67 | 0.59 | 0.69 | 0.70 | 0.92 | 0.91 |
| 22:00 | 0.88 | 0.90 | 0.95 | 0.84 | 0.87 | 0.74 | 0.66 | 0.58 | 0.69 | 0.70 | 0.92 | 0.90 |
| 23:00 | 0.89 | 0.93 | 0.95 | 0.83 | 0.89 | 0.74 | 0.66 | 0.57 | 0.68 | 0.71 | 0.91 | 0.90 |
| 00:00 | 0.88 | 0.93 | 0.96 | 0.83 | 0.90 | 0.74 | 0.67 | 0.56 | 0.68 | 0.71 | 0.91 | 0.90 |
| Hour | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 01:00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 02:00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 03:00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 04:00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 05:00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 06:00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.02 | 0.02 | 0.01 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 07:00 | 0.00 | 0.00 | 0.01 | 0.05 | 0.11 | 0.11 | 0.10 | 0.07 | 0.03 | 0.01 | 0.00 | 0.00 |
| 08:00 | 0.00 | 0.02 | 0.10 | 0.24 | 0.30 | 0.31 | 0.30 | 0.28 | 0.23 | 0.06 | 0.03 | 0.01 |
| 09:00 | 0.05 | 0.14 | 0.37 | 0.45 | 0.52 | 0.53 | 0.54 | 0.52 | 0.45 | 0.40 | 0.21 | 0.05 |
| 10:00 | 0.33 | 0.46 | 0.57 | 0.65 | 0.71 | 0.72 | 0.74 | 0.73 | 0.63 | 0.58 | 0.48 | 0.34 |
| 11:00 | 0.52 | 0.60 | 0.72 | 0.79 | 0.85 | 0.87 | 0.89 | 0.88 | 0.75 | 0.69 | 0.59 | 0.52 |
| 12:00 | 0.59 | 0.69 | 0.81 | 0.88 | 0.93 | 0.95 | 0.98 | 0.97 | 0.83 | 0.75 | 0.66 | 0.57 |
| 13:00 | 0.62 | 0.72 | 0.86 | 0.90 | 0.94 | 0.97 | 1.00 | 0.99 | 0.84 | 0.76 | 0.66 | 0.58 |
| 14:00 | 0.57 | 0.69 | 0.82 | 0.86 | 0.90 | 0.92 | 0.96 | 0.94 | 0.80 | 0.68 | 0.58 | 0.53 |
| 15:00 | 0.47 | 0.59 | 0.70 | 0.74 | 0.77 | 0.81 | 0.85 | 0.82 | 0.67 | 0.55 | 0.46 | 0.41 |
| 16:00 | 0.32 | 0.43 | 0.53 | 0.56 | 0.59 | 0.64 | 0.68 | 0.64 | 0.49 | 0.37 | 0.28 | 0.25 |
| 17:00 | 0.10 | 0.23 | 0.32 | 0.35 | 0.38 | 0.42 | 0.45 | 0.41 | 0.29 | 0.15 | 0.06 | 0.04 |
| 18:00 | 0.00 | 0.02 | 0.09 | 0.13 | 0.16 | 0.19 | 0.21 | 0.17 | 0.07 | 0.01 | 0.00 | 0.00 |
| 19:00 | 0.00 | 0.00 | 0.00 | 0.01 | 0.03 | 0.05 | 0.05 | 0.02 | 0.00 | 0.00 | 0.00 | 0.00 |
| 20:00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 21:00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 22:00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 23:00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 00:00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
References
- Tambunan, H.; Hakam, D.; Prahastono, I.; Pharmatrisanti, A.; Purnomoadi, A.; Aisyah, S.; Wicaksono, Y.; Sandy, I. The Challenges and Opportunities of Renewable Energy Source (RES) Penetration in Indonesia: Case Study of Java-Bali Power System. Energies 2020, 13, 5903. [Google Scholar] [CrossRef]
- Schultis, D.L. Comparison of Local Volt/var Control Strategies for PV Hosting Capacity Enhancement of Low Voltage Feeders. Energies 2019, 12, 1560. [Google Scholar] [CrossRef] [Green Version]
- Holjevac, N.; Baškarad, T.; Đaković, J.; Krpan, M.; Zidar, M.; Kuzle, I. Challenges of High Renewable Energy Sources Integration in Power Systems—The Case of Croatia. Energies 2021, 14, 1047. [Google Scholar] [CrossRef]
- Al-Masri, H.; Al-Quraan, A.; AbuElrub, A.; Ehsani, M. Optimal Coordination of Wind Power and Pumped Hydro Energy Storage. Energies 2019, 12, 4387. [Google Scholar] [CrossRef] [Green Version]
- Reboredo, J.; Ugolini, A.; Chen, Y. Interdependence between Renewable-Energy and Low-Carbon Stock Prices. Energies 2019, 12, 4461. [Google Scholar] [CrossRef] [Green Version]
- Mladenov, V.; Chobanov, V.; Georgiev, A. Impact of Renewable Energy Sources on Power System Flexibility Requirements. Energies 2021, 14, 2813. [Google Scholar] [CrossRef]
- Beltran, H.; Harrison, S.; Egea-Àlvarez, A.; Xu, L. Techno-Economic Assessment of Energy Storage Technologies for Inertia Response and Frequency Support from Wind Farms. Energies 2020, 13, 3421. [Google Scholar] [CrossRef]
- Ackermann, T.; Prevost, T.; Vittal, V.; Roscoe, A.J.; Matevosyan, J.; Miller, N. Paving the Way: A Future without Inertia Is Closer than You Think. IEEE Power Energy Mag. 2017, 15, 61–69. [Google Scholar] [CrossRef] [Green Version]
- ENTSO-E Technical Report. High Penetration of Power Electronic Interfaced Power Sources and the Potential Contribution of Grid Forming Converters. 2020. Available online: https://eepublicdownloads.entsoe.eu/clean-documents/Publications/SOC/High_Penetration_of_Power_Electronic_Interfaced_Power_Sources_and_the_Potential_Contribution_of_Grid_Forming_Converters.pdf (accessed on 1 July 2021).
- Curto, D.; Favuzza, S.; Franzitta, V.; Musca, R.; Navia, M.N.; Zizzo, G. Evaluation of the optimal renewable electricity mix for Lampedusa island: The adoption of a technical and economical methodology. J. Clean. Prod. 2020, 263, 121404. [Google Scholar] [CrossRef]
- Croce, D.; Giuliano, F.; Bonomolo, M.; Leone, G.; Musca, R.; Tinnirello, I. A decentralized load control architecture for smart energy consumption in small islands. Sustain. Cities Soc. 2020, 53, 101902. [Google Scholar] [CrossRef]
- Crainz, M.; Curto, D.; Franzitta, V.; Longo, S.; Montana, F.; Musca, R.; Sanseverino, E.R.; Telaretti, E. Flexibility services to minimize the electricity production from fossil fuels. A case study in a Mediterranean small island. Energies 2019, 12, 3492. [Google Scholar] [CrossRef] [Green Version]
- Favuzza, S.; Ippolito, M.; Massaro, F.; Mineo, L.; Musca, R.; Zizzo, G. New energy corridors in the euro-mediterranean area: The pivotal role of Sicily. Energies 2018, 11, 1415. [Google Scholar] [CrossRef] [Green Version]
- Tielens, P.; Hertem, D. The relevance of inertia in power systems. Renew. Sustain. Energy Rev. 2016, 55, 999–1009. [Google Scholar] [CrossRef]
- Bongiorno, M.; Favuzza, S.; Ippolito, M.G.; Musca, R.; Zizzo, G. Inertial Response of Isolated Power Networks with Wind Power Plants. In Proceedings of the 2019 IEEE PowerTech, Milano, Italy, 23–27 June 2019. [Google Scholar]
- Delille, G.; François, B.; Malarange, G. Dynamic Frequency Control Support by Energy Storage to Reduce the Impact of Wind and Solar Generation on Isolated Power System’s Inertia. IEEE Trans. Sustain. Energy 2012, 3, 931–939. [Google Scholar] [CrossRef]
- Bongiorno, M.; Favuzza, S.; Ippolito, M.G.; Musca, R.; Navia, M.S.N.; Sanseverino, E.R.; Zizzo, G. System Stability of a Small Island’s Network with Different Levels of Wind Power Penetration. In Proceedings of the IEEE 4th International Forum on Research and Technologies for Society and Industry, Palermo, Italy, 10–13 September 2018. [Google Scholar]
- Horne, J.; Flynn, D.; Littler, T. Frequency Stability Issues for Islanded Power Systems. In Proceedings of the IEEE PES Power Systems Conference and Exposition, New York, NY, USA, 10–13 October 2004. [Google Scholar]
- Bongiorno, M.; Favuzza, S.; Ippolito, M.G.; Musca, R.; Navia, M.S.N.; Sanseverino, E.R.; Zizzo, G. An Analysis of the Intertial Response of Small Isolated Power Systems in Presence of Generation from Renewable Energy Sources. In Proceedings of the IEEE 4th International Forum on Research and Technologies for Society and Industry, Palermo, Italy, 10–13 September 2018. [Google Scholar]
- Ippolito, M.G.; Silvestre, M.L.D.; Sanseverino, E.R.; Zizzo, G.; Graditi, G. Multi-objective optimized management of electrical energy storage systems in an islanded network with renewable energy sources under different design scenarios. Energy 2013, 64, 648–662. [Google Scholar] [CrossRef]
- Liu, W.; Luo, F.; Liu, Y.; Ding, W. Optimal Siting and Sizing of Distributed Generation Based on Improved Nondominated Sorting Genetic Algorithm II. Processes 2019, 7, 955. [Google Scholar] [CrossRef] [Green Version]
- Zhang, M.; Gan, M.; Li, L. Sizing and Siting of Distributed Generators and Energy Storage in a Microgrid Considering Plug-in Electric Vehicles. Energies 2019, 12, 2293. [Google Scholar] [CrossRef] [Green Version]
- Ghimire, S.; Alizadeh, S. Developing a Decision Tree Algorithm for Wind Power Plants Siting and Sizing in Distribution Networks. Energies 2021, 14, 2293. [Google Scholar] [CrossRef]
- Karunarathne, E.; Pasupuleti, J.; Ekanayake, J.; Almeida, D. The Optimal Placement and Sizing of Distributed Generation in an Active Distribution Network with Several Soft Open Points. Energies 2021, 14, 1084. [Google Scholar] [CrossRef]
- Global Wind Atlas. Available online: https://globalwindatlas.info/ (accessed on 1 May 2021).
- Global Solar Atlas. Available online: https://globalsolaratlas.info/ (accessed on 1 May 2021).
- ENTSO-E SPD (System Protection & Dynamics) Subgroup. Documentation on Controller Tests in Test Grid Configurations; ENTSO-E: Brussels, Belgium, 2013; Available online: https://eepublicdownloads.entsoe.eu/clean-documents/pre2015/publications/entsoe/RG_SOC_CE/131127_Controller_Test_Report.pdf (accessed on 1 July 2021).
- IEC 61400-27-1. Wind Energy Generation Systems—Part 27-1: Electrical Simulation Models—Generic Models, 2nd ed.; International Electrotechnical Commission (IEC): Genève, Switzerland, 2020. [Google Scholar]
- CIGRE Technical Brochure. Modelling of Inverter-Based Generation for Power System Dynamic Studies; Joint Working Group C4/C6.35/CIRED. 2018. Available online: https://e-cigre.org/publication/727-modelling-of-inverter-based-generation-for-power-system-dynamic-studies (accessed on 1 July 2021).
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodriguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Knap, V.; Chaudhary, S.K.; Stroe, D.L.; Swierczynski, M.J.; Craciun, B.I.; Teodorescu, R. Sizing of an Energy Storage System for Grid Inertial Response and Primary Frequency Reserve. IEEE Trans. Power Syst. 2016, 31, 3447–3456. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Gao, W.; Gao, T.; Yan, W.; Zhang, H.; Yan, S.; Wang, X. State-of-the-art review on frequency response of wind power plants in power systems. J. Mod. Power Syst. Clean Energy 2018, 6, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Kerdphol, T.; Rahman, F.S.; Watanabe, M.; Mitani, Y.; Turschner, D.; Beck, H.P. Enhanced Virtual Inertia Control Based on Derivative Technique to Emulate Simultaneous Inertia and Damping Properties for Microgrid Frequency Regulation. IEEE Access 2019, 7, 14422–14433. [Google Scholar] [CrossRef]
- Yu, M.; Dyśko, A.; Booth, C.D.; Roscoe, A.; Zhu, J. A review of control methods for providing frequency response in VSC-HVDC transmission systems. In Proceedings of the 49th International Universities Power Engineering Conference (UPEC) , Cluj-Napoca, Romania, 2–5 September 2014. [Google Scholar]
- Li, J.; Xiong, R.; Yang, Q.; Liang, F.; Zhang, M.; Yuan, W. Design/test of a hybrid energy storage system for primary frequency control using a dynamic droop method in an isolated microgrid power system. Appl. Energy 2017, 201, 257–269. [Google Scholar] [CrossRef]
- Pinthurat, W.; Hredzak, B. Decentralized Frequency Control of Battery Energy Storage Systems Distributed in Isolated Microgrid. Energies 2020, 13, 3026. [Google Scholar] [CrossRef]
- Xu, H.; Pan, Z. An adaptive droop control strategy of energy storage control for microgrid with wind power and energy storage systems. In Proceedings of the 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, Australia, 11–14 August 2017. [Google Scholar]
- Zhang, Y. Battery energy storage operation with adaptive droop control. In Proceedings of the IEEE Conference on Control Technology and Applications (CCTA), Maui, HI, USA, 27–30 August 2017. [Google Scholar]
- Xing, W.; Wang, H.; Lu, L.; Wang, S.; Ouyang, M. An adaptive droop control for distributed battery energy storage systems in microgrids with DAB converters. Int. J. Electr. Power Energy Syst. 2021, 130. [Google Scholar] [CrossRef]
- NEPLAN Power Systems Analysis Software. Available online: https://www.neplan.ch/en-products/ (accessed on 1 July 2021).
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. Distributed Power System Virtual Inertia Implemented by Grid-Connected Power Converters. IEEE Trans. Power Electron. 2018, 33, 8488–8499. [Google Scholar] [CrossRef] [Green Version]









| Scenario | Description |
|---|---|
| HL-HR | High load (8 MW) and high RES generation (4 MW) |
| 2 storage units in discharging mode, 2 in charging mode | |
| HL-LR | High load (8 MW) and low RES generation (<1 MW) |
| All 4 storage units in discharging mode | |
| LL-HR | Low load (4 MW) and high RES generation (4 MW) |
| All 4 storage units in charging mode | |
| LL-LR | Low load (4 MW) and low RES generation (<1 MW) |
| 2 storage units in discharging mode, 2 in charging mode |
| Parameter | Description | Value |
|---|---|---|
| time constant of active power low-pass filter | 0.01 s | |
| time constant of reactive power low-pass filter | 0.01 s | |
| minimum ramp rate for active power reference | −1 pu/s | |
| maximum ramp rate for active power reference | 1 pu/s | |
| minimum value for active power reference | −1.1 pu | |
| maximum value for active power reference | 1.1 pu | |
| proportional gain of PLL | 60 pu | |
| integral gain of PLL | 900 pu | |
| time constant of physical generation source | 0.01 s | |
| gain of synthetic inertia | 6 pu | |
| time constant of filtered derivative for synthetic inertia | 0.01 s | |
| gain of primary reserve (discharging mode) | 20 pu | |
| gain of primary reserve (charging mode) | 250 pu | |
| time constant of low-pass filter for primary reserve | 0.001 s | |
| minimum threshold of frequency dead-band | 49.9 Hz | |
| maximum threshold of frequency dead-band | 50.1 Hz |
| Scenario | fmin (Hz) | RoCoF (Hz/s) |
|---|---|---|
| Synchronous generation (base) | 49.72 | −0.37 |
| High load and high RES (HL-HR) | ||
| Storage and WT | unstable | unstable |
| IR+PR in all storage | 49.53 | −1.13 |
| IR+PR in all storage and all WT | 49.79 | −0.63 |
| Proposed droop control in two storage | 49.81 | −1.13 |
| Proposed droop control in two storage, IR all WT | 49.93 | −0.69 |
| High load and low RES (HL-LR) | ||
| Storage and WT | unstable | unstable |
| IR+PR in all storage | 49.46 | −0.91 |
| IR+PR in all storage and all WT | 49.80 | −0.56 |
| Proposed droop control in two storage | 49.46 | −0.91 |
| Proposed droop control in two storage, IR all WT | 49.70 | −0.61 |
| Low load and high RES (LL-HR) | ||
| Storage and WT | 49.10 | −1.22 |
| IR+PR in all storage | 49.55 | −1.19 |
| IR+PR in all storage and all WT | 49.79 | −0.63 |
| Proposed droop control in two storage | 49.80 | −1.19 |
| Proposed droop control in two storage, IR all WT | 49.92 | −0.69 |
| Low load and low RES (LL-LR) | ||
| Storage and WT | 49.10 | −1.20 |
| IR+PR in all storage | 49.55 | −1.17 |
| IR+PR in all storage and all WT | 49.79 | −0.62 |
| Proposed droop control in two storage | 49.80 | −1.17 |
| Proposed droop control in two storage, IR all WT | 49.93 | −0.68 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ippolito, M.G.; Massaro, F.; Musca, R.; Zizzo, G. An Original Control Strategy of Storage Systems for the Frequency Stability of Autonomous Grids with Renewable Power Generation. Energies 2021, 14, 4391. https://doi.org/10.3390/en14154391
Ippolito MG, Massaro F, Musca R, Zizzo G. An Original Control Strategy of Storage Systems for the Frequency Stability of Autonomous Grids with Renewable Power Generation. Energies. 2021; 14(15):4391. https://doi.org/10.3390/en14154391
Chicago/Turabian StyleIppolito, Mariano G., Fabio Massaro, Rossano Musca, and Gaetano Zizzo. 2021. "An Original Control Strategy of Storage Systems for the Frequency Stability of Autonomous Grids with Renewable Power Generation" Energies 14, no. 15: 4391. https://doi.org/10.3390/en14154391
APA StyleIppolito, M. G., Massaro, F., Musca, R., & Zizzo, G. (2021). An Original Control Strategy of Storage Systems for the Frequency Stability of Autonomous Grids with Renewable Power Generation. Energies, 14(15), 4391. https://doi.org/10.3390/en14154391