Performance Improvement of Matrix Converter Direct Torque Control System

Abstract
1. Introduction
2. Basic Principle and Modulation Strategy of Direct Matrix Converter
2.1. Status of Direct Matrix Converter
2.2. Basic Principle of Direct Matrix Converter
2.3. Modulation Strategy of Direct Matrix Converter
- (1)
- No short circuit between any two phases of the three-phase input terminals a, b, and c of the matrix converter.
- (2)
- The three-phase output terminals A, B, and C of the matrix converter cannot be disconnected between any single phases.
3. Principle of Direct Torque Control Strategy of Asynchronous Motor Based on Direct Matrix Converter
3.1. The Basic Concept of Direct Torque Control for Asynchronous Motors
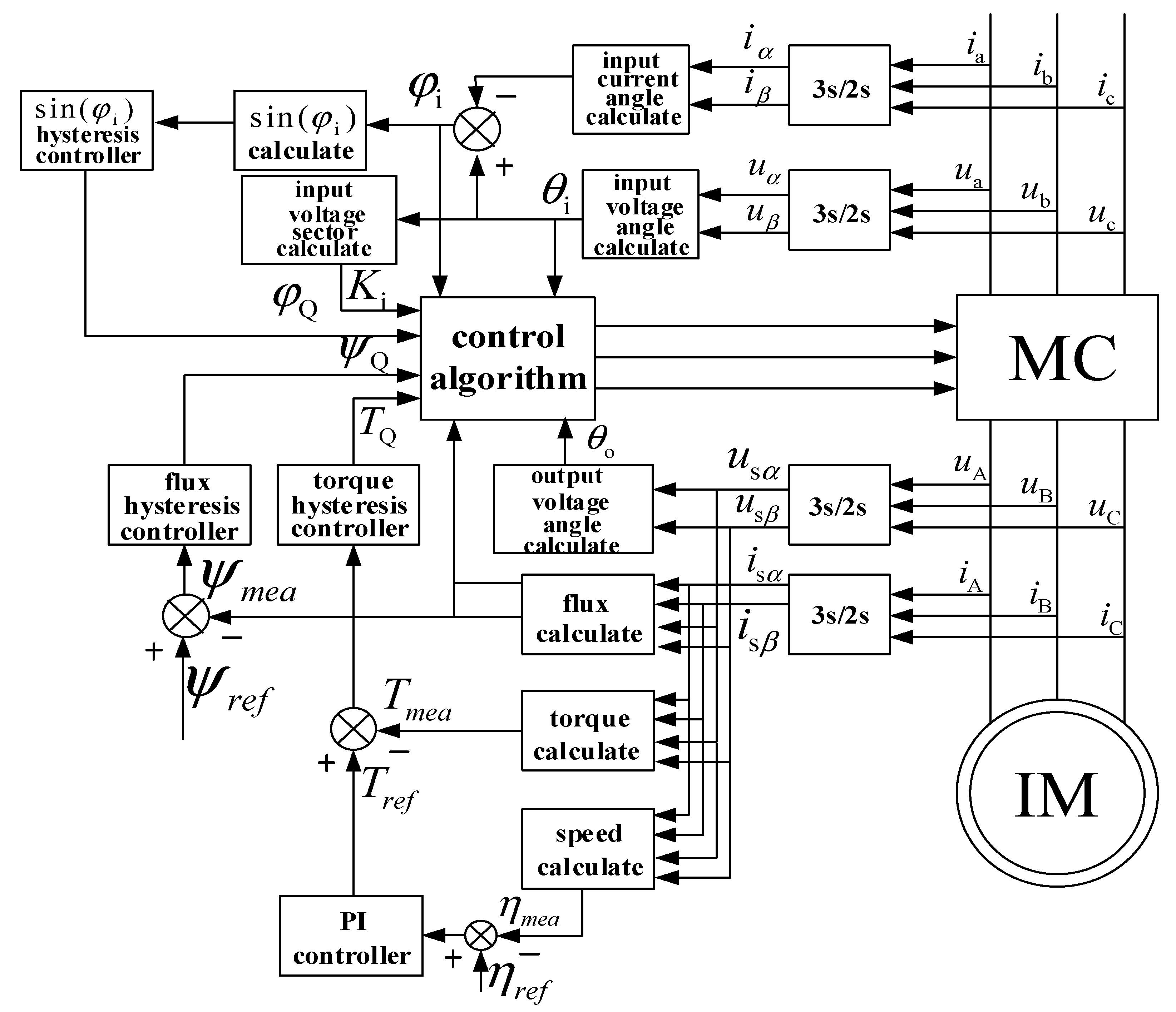
3.2. The Principle of Direct Matrix Converter-Direct Torque Control System of Asynchronous Motors
4. Performance Improvement of Direct Torque Control System
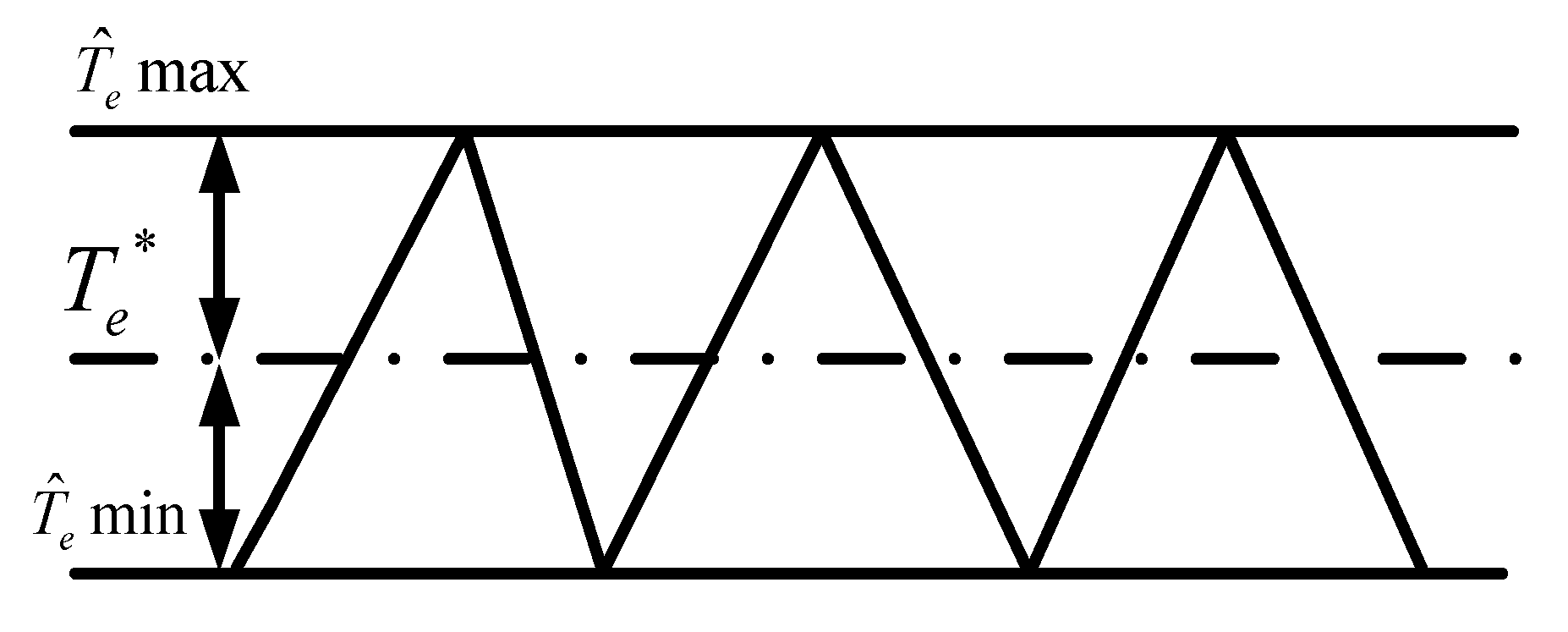
4.1. Torque Ripple Analysis
- When the motor is running at high speed or medium speed and heavy load, the torque rise may be less than the torque drop during one sampling period. The actual average torque has a negative offset from the command value.
- When the motor is running at medium lower speeds and heavy load, the rise of torque may be approximately equal to the drop of torque during a sampling period. The actual average torque is basically equal to the command value without bias.
- When the motor is running in the low speed range, especially when the very low speed is close to zero speed, the torque rise may be greater than the torque drop in a sampling period. The actual average torque has a positive offset from the command value.
4.2. Torque Tracking Algorithm
- , indicating that the difference between the torque and the command value is large at this time, and the non-zero vector effect cannot reach the command value, therefore it is not necessary to apply a zero vector, and can be used.
- , which means that the torque can reach the command value in one cycle at this time, therefore the zero vectors need to be added.
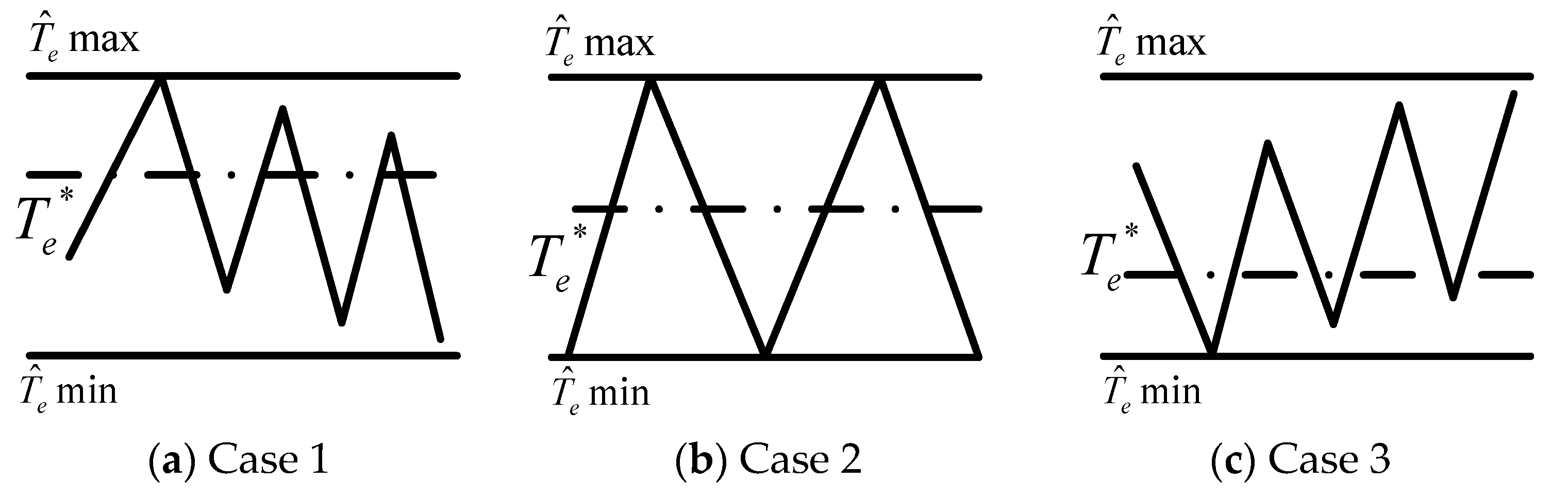
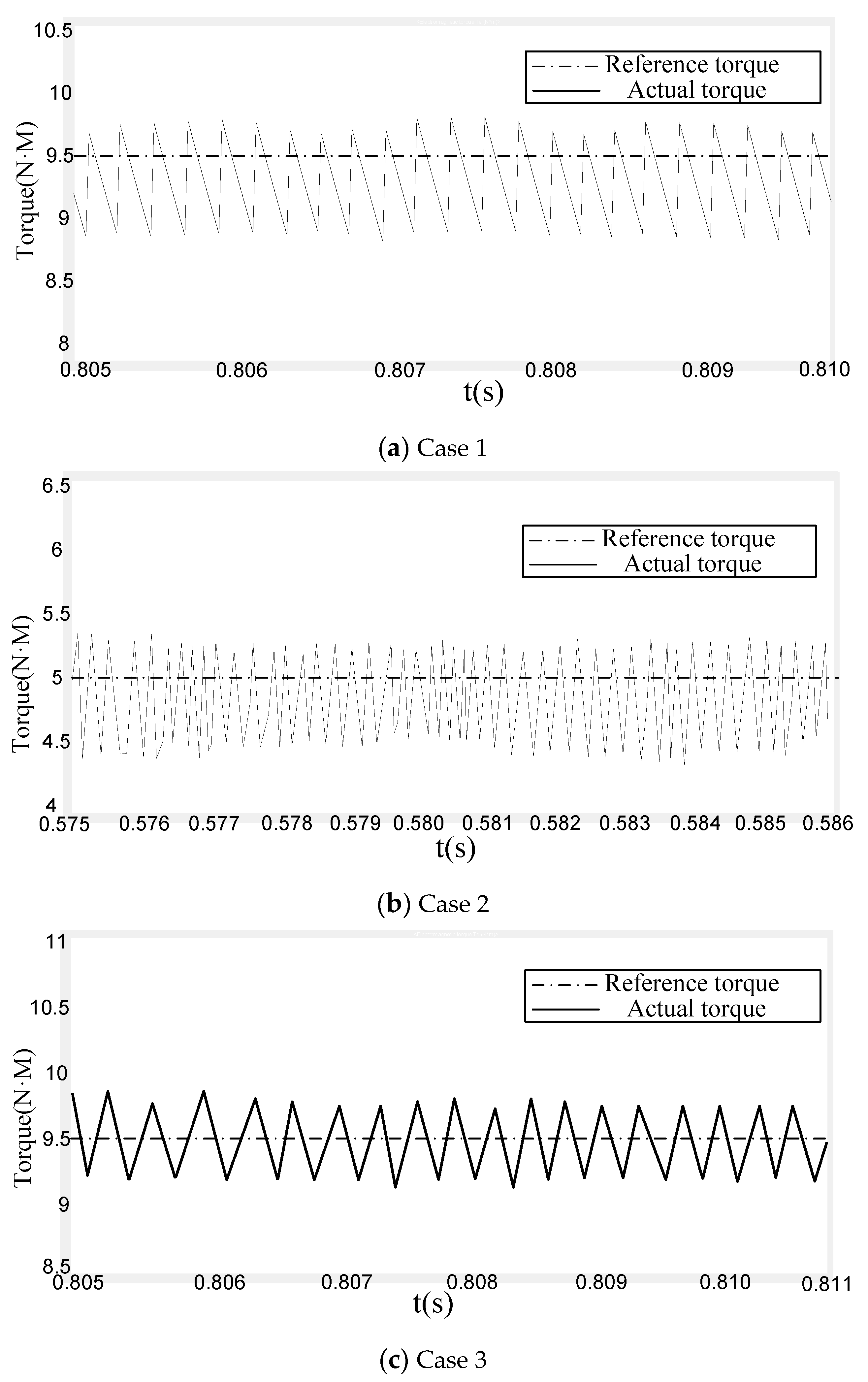
- For the case shown in Figure 6a, portion above the torque command value to the maximum torque ripple value will decrease, while the portion below the command value will not change. However, in this case, the increase in torque is much slower than the decrease in torque. Hence, the reduction is limited, and the phenomenon of negative offset of average torque still exists.
- For the case shown in Figure 6b, portion above the torque command value to the maximum torque ripple will reduce by about half of the amplitude before improvement, and the portion below the command value will remain unchanged. The total pulsation amplitude will be reduced to about 70% before improvement, and there will be a small negative offset of the average torque.
- For the case shown in Figure 6c, portion above the torque command value to the maximum torque ripple value will greatly reduce. Although portion below the command value remains unchanged, the improved ripple amplitude will be very small because of the small reduction of zero vector to torque in this case. In addition, the original average torque positive bias will be reduced or even eliminated.
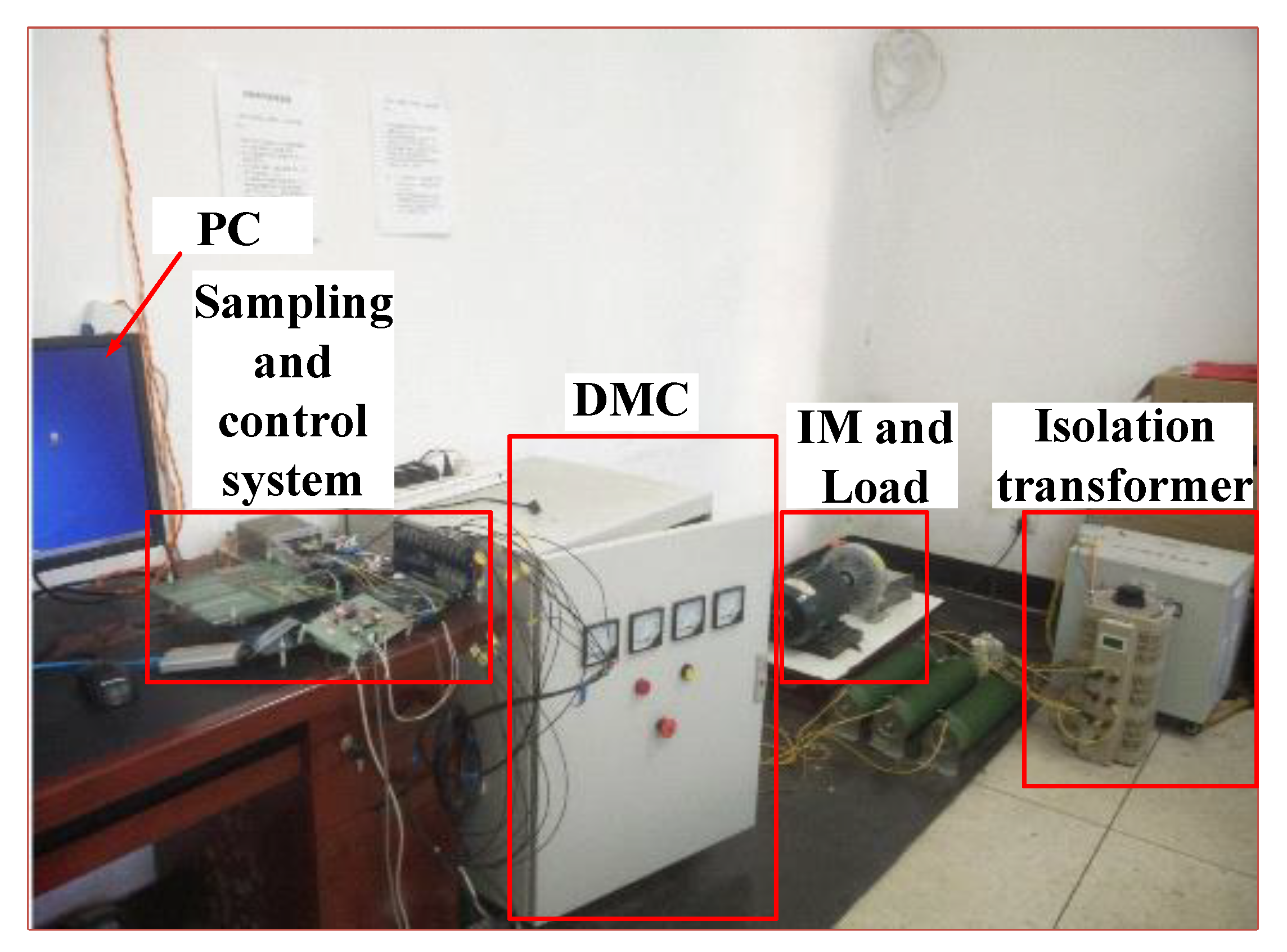
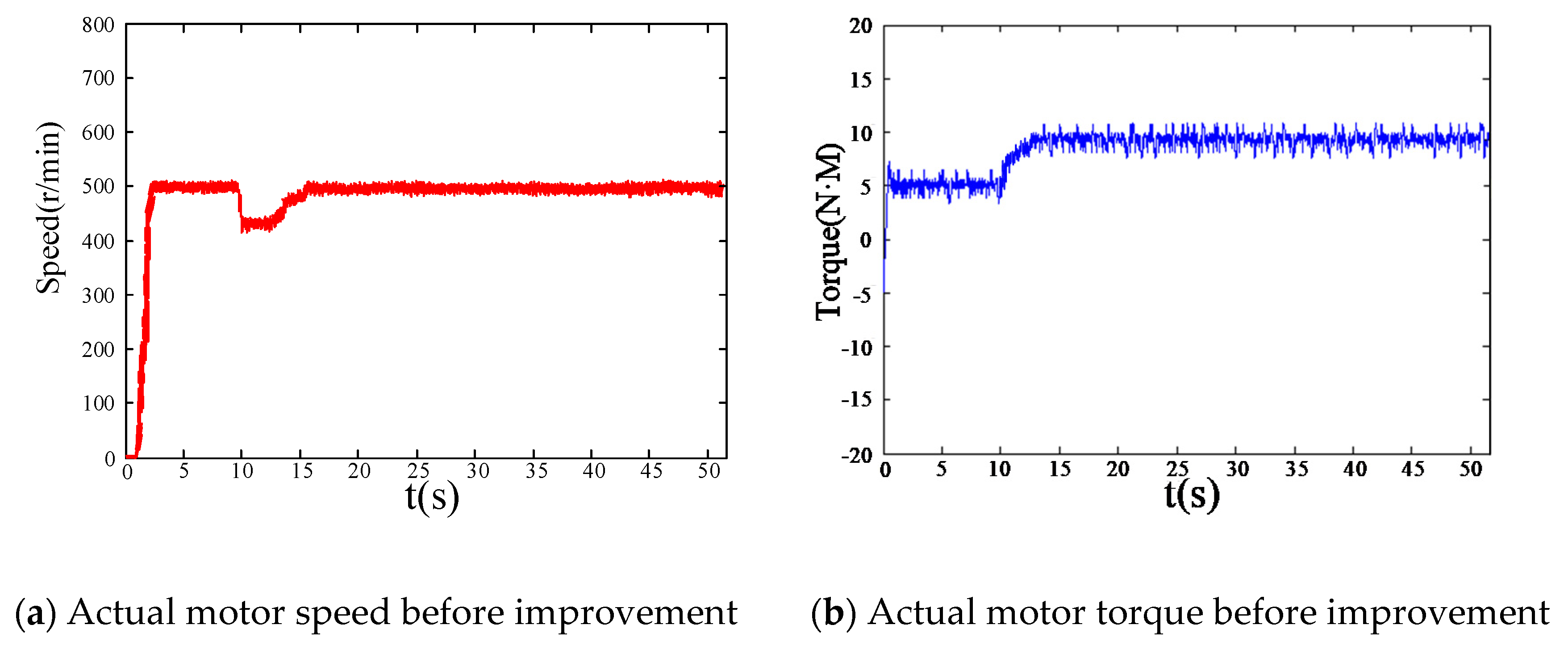
5. Experiment
6. Conclusions
- (1)
- The output power factor of the DMC-DTC system is high.
- (2)
- The system torque response is rapid, direct torque control has the advantages of simple rules, direct control means, and rapid torque response. However, the control performance is still insufficient in some aspects.
- (3)
- An in-depth theoretical analysis of the above-mentioned performance defects and the causes of such deficiencies were carried out, and an improved method of torque tracking control was proposed to reduce torque ripple.
- (4)
- The quality of the output current waveform of the system is improved, and the harmonic content is less. The matrix converter-direct torque control system proposed and implemented in this paper has a simple structure and clear ideas. It has laid a good foundation for the development of high-performance frequency conversion speed control system.
Author Contributions
Funding
Conflicts of Interest
References
- Mondal, S.; Kastha, D. Input Reactive Power Controller with a Novel Active Damping Strategy for a Matrix Converter Fed Direct Torque Controlled DFIG for Wind Power Generation. IEEE J. Emerg. Sel. Top. Power Electron. 2019. [Google Scholar] [CrossRef]
- Gontijo, G.; Soares, M.; Tricarico, T.; Dias, R.; Aredes, M.; Guerrero, J. Direct Matrix Converter To-pologies with Model Predictive Current Control Applied as Power Interfaces in AC, DC, and Hybrid Microgrids in Islanded and Grid-Connected Modes. Energies 2019, 12, 3302. [Google Scholar] [CrossRef]
- Tuyen, N.D.; Dzung, P.Q. Space vector modulation for an indirect matrix converter with improved input power factor. Energies 2017, 10, 588. [Google Scholar] [CrossRef]
- Rodriguez, J.; Rivera, M.; Kolar, J.W.; Wheeler, P.W. A Review of Control and Modulation Methods for Matrix Converters. IEEE Trans. Ind. Electron. 2012, 59, 58–70. [Google Scholar] [CrossRef]
- Bak, Y.; Lee, E.; Lee, K.B. Indirect matrix converter for hybrid electric vehicle application with three-phase and single-phase outputs. Energies 2015, 8, 3849–3866. [Google Scholar] [CrossRef]
- Xu, L. Research on the Amplitude Coefficient for Multilevel Matrix Converter Space Vector Modulation. IEEE Trans. Power Electron. 2012, 27, 3544–3556. [Google Scholar]
- Bao, G.Q.; Qi, W.G.; He, T. Direct Torque Control of PMSM with Modified Finite Set Model Predictive Control. Energies 2020, 13, 234. [Google Scholar] [CrossRef]
- Lee, J.S. Stability Analysis of Deadbeat-Direct Torque and Flux Control for Permanent Magnet Synchronous Motor Drives with Respect to Pa-rameter Variations. Energies 2018, 11, 2027. [Google Scholar] [CrossRef]
- Yan, Y.; Zhao, J.; Xia, C.; Shi, T. Direct torque control of matrix converter-fed permanent magnet synchronous motor drives based on master and slave vectors. IET Power Electron. 2015, 8, 288–296. [Google Scholar] [CrossRef]
- Karlovsky, P.; Lettl, J. Induction motor drive direct torque control and predictive torque control comparison based on switching pattern analy-sis. Energies 2018, 11, 1793. [Google Scholar] [CrossRef]
- Park, J.B.; Wang, X. Sensorless direct torque control of surface-mounted permanent magnet synchronous motors with nonlinear Kalman filtering. Energies 2018, 11, 969. [Google Scholar] [CrossRef]
- Liu, Q.; Hameyer, K. Torque Ripple Minimization for Direct Torque Control of PMSM With Modified FCSMPC. IEEE Trans. Ind. Appl. 2016, 52, 4855–4864. [Google Scholar] [CrossRef]
- Ameur, A.; Mokhtari, B.; Essounbouli, N.; Mokrani, L. Speed sensorless direct torque control of a pmsm drive using space vector modulation based mras and stator resistance estimator. Variations 2012, 1, 5. [Google Scholar]
- Xia, C.; Wang, S.; Wang, Z.; Shi, T. Direct Torque Control for VSI–PMSMs Using Four-Dimensional Switching-Table. IEEE Trans. Power Electron. 2016, 31, 5774–5785. [Google Scholar] [CrossRef]
- Naik, N.V.; Panda, A.; Singh, S.P. A Three-Level Fuzzy-2 DTC of Induction Motor Drive Using SVPWM. IEEE Trans. Ind. Electron. 2016, 63, 1467–1479. [Google Scholar] [CrossRef]
- Abosh, A.H.; Zhu, Z.Q.; Ren, Y. Reduction of Torque and Flux Ripples in Space Vector Modulation-Based Direct Torque Control of Asymmetric Permanent Magnet Synchronous Machine. IEEE Trans. Power Electron. 2017, 32, 2976–2986. [Google Scholar] [CrossRef]
- Zhao, S.; Yu, H.; Yu, J.; Shan, B. Induction motor DTC based on adaptive SMC and fuzzy control. In Proceedings of the 27th Chinese Control and Decision Conference (2015 CCDC), Qingdao, China, 23–25 May 2015; pp. 4474–4479. [Google Scholar] [CrossRef]
- Jang, Y.; Bak, Y.; Lee, K. Indirect Matrix Converter for Permanent-Magnet-Synchronous-Motor Drives by Improved Torque Predictive Control. In Proceedings of the 2018 International Power Electronics Conference (IPEC-Niigata 2018 -ECCE Asia), Niigata, Japan, 20–24 May 2018; pp. 1736–1740. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sector | |||||||
|---|---|---|---|---|---|---|---|
| ① | ② | ③ | ④ | ⑤ | ⑥ | ||
| −1 | −1 | U2 | U3 | U4 | U5 | U6 | U1 |
| 0 | U7 | U0 | U7 | U0 | U7 | U0 | |
| 1 | U6 | U1 | U2 | U3 | U4 | U5 | |
| 1 | −1 | U3 | U4 | U5 | U6 | U1 | U2 |
| 0 | U0 | U7 | U0 | U7 | U0 | U7 | |
| 1 | U5 | U6 | U1 | U2 | U3 | U4 | |
| Sector | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ① | ② | ③ | ④ | ⑤ | ⑥ | |||||||
| Sin | 1 | −1 | 1 | −1 | 1 | −1 | 1 | −1 | 1 | −1 | 1 | −1 |
| U1 | −3 | 1 | 2 | −3 | −1 | 2 | 3 | −1 | −2 | 3 | 1 | −2 |
| U2 | 9 | −7 | −8 | 9 | 7 | −8 | −9 | 7 | 8 | −9 | −7 | 8 |
| U3 | −6 | 4 | 5 | −6 | −4 | 5 | 6 | −4 | −5 | 6 | 4 | −5 |
| U4 | 3 | −1 | −2 | 3 | 1 | −2 | −3 | 1 | 2 | −3 | −1 | 2 |
| U5 | −9 | 7 | 8 | −9 | −7 | 8 | 9 | −7 | −8 | 9 | 7 | −8 |
| U6 | 6 | −4 | −5 | 6 | 4 | −5 | −6 | 4 | 5 | −6 | −4 | 5 |
| Variable | Parameters | Value |
|---|---|---|
| PN | Rated power | 3 kW |
| UN | Rated voltage | 380 V |
| Rs | Stator resistance | 0.2 Ω |
| Rs | Stator inductance | 2.2 mH |
| Rr | Rotor resistance | 0.42 Ω |
| Lr | Rotor inductance | 2.2 mH |
| Lm | Mutual inductance | 1.56 mH |
| np | Pole pairs of motor | 2 |
| Variable | Parameters | Value |
|---|---|---|
| PN | Rated power | 3 kW |
| UN | Rated voltage | 380 V |
| RS | Stator resistance | 0.2 Ω |
| LS | Stator inductance | 2.2 mH |
| Rr | Rotor resistance | 0.42 Ω |
| Lr | Rotor inductance | 2.2 mH |
| Lm | Mutual inductance | 1.56 mH |
| np | Pole pairs of motor | 2 |
| nN | Rated speed | 1430 r/min |
| TN | 20 | N·m |
| Control Method | Torque Response Time | Torque Standard Deviation ( ) | Mutation Response Time | THD of Motor Current |
|---|---|---|---|---|
| Traditional DTC | 0.7 s | 8.67 N·m | 3.3 s | 15.74% |
| Improved DTC | 0.5 s | 4.93 N·m | 2.1 s | 9.65% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, B.; Guo, Y.; Xiao, X.; Yang, B.; Wang, X.; Shi, M.; Tu, Y. Performance Improvement of Matrix Converter Direct Torque Control System. Energies 2020, 13, 3247. https://doi.org/10.3390/en13123247
Zou B, Guo Y, Xiao X, Yang B, Wang X, Shi M, Tu Y. Performance Improvement of Matrix Converter Direct Torque Control System. Energies. 2020; 13(12):3247. https://doi.org/10.3390/en13123247
Chicago/Turabian StyleZou, Bowei, Yougui Guo, Xi Xiao, Bowen Yang, Xiao Wang, Mingzhang Shi, and Yulin Tu. 2020. "Performance Improvement of Matrix Converter Direct Torque Control System" Energies 13, no. 12: 3247. https://doi.org/10.3390/en13123247
APA StyleZou, B., Guo, Y., Xiao, X., Yang, B., Wang, X., Shi, M., & Tu, Y. (2020). Performance Improvement of Matrix Converter Direct Torque Control System. Energies, 13(12), 3247. https://doi.org/10.3390/en13123247