1. Introduction
Photovoltaic (PV) systems have become some of the most popular renewable generation sources [
1,
2,
3]. They can have different configurations based on centralized or multiple inverters with single- or two-stage topologies [
4,
5]. The flexibility and efficiency of two-stage voltage source inverter (VSI) topologies have led to their widespread use; however, single-stage topologies based on impedance-source networks with a centralized inverter [
6,
7,
8,
9] or micro-inverters [
10,
11] are increasing in popularity as simple and economical configurations that can overcome the shortcomings of two-stage VSI topologies. Reviews of single-stage impedance-based converters (including the main topologies, modeling, control and cutting-edge techniques) are presented in [
6,
7,
8]. An analytical comparison of the passive components and semiconductor stress of the previous inverters and multilevel buck–boost inverters is presented in [
9]. Single-stage impedance-based converters such Z-source and quasi-Z-source inverters (qZSIs) are currently used for the integration of renewables and grids [
6,
9]. A review of the use of micro-inverters as a rising technology in PV systems is also presented in [
10,
11]. In particular, qZSIs are promising because buck–boost voltage is efficiently and reliably generated in a single-stage operation [
6,
7,
8,
9,
12,
13,
14,
15,
16,
17]. A traditional qZSI with a semiconductor and impedance network between the DC energy source and the AC grid inverter is investigated in [
6,
7,
8,
9,
12,
13,
14]. Four improved qZSIs are theoretically studied in [
15], while a three-level NPC qZSI, which provides high energy density, short circuit immunity and voltage regulation (step-down and step-up) capability, is examined in [
16,
17].
Grid integration of PV power systems can lead to stability problems because the damping of power conversion systems connected to the grid is reduced by power electronics. Many studies have dealt with this issue in PV power systems based on traditional two-stage converter topologies by means of small-signal state-space (SS) models. Specifically, the impacts of PV power system variables (e.g., solar irradiance and temperature [
18,
19]) and control parameters [
3] on stability have been investigated. Other works have looked at qZSI-PV system stability, but most only have provided qZSI dynamic models to analyze qZSI stability and derive general conclusions about qZSI-PV system stability [
6,
7,
8,
12,
13,
14,
17]. The qZSI control methods and their influence on qZSI stability are explored in [
6,
14], while qZSI design guides are given from these dynamic models in [
12,
13]. Exhaustive operating range studies on the impacts of converter variables on the transient response of different Z-source inverters such as qZSIs are also performed in [
7,
8]. Moreover, qZSI modeling for analysis of qZSI controls is applied in [
17]. It is worth noting that very few studies have provided dynamic models of a complete qZSI-PV system [
20,
21,
22,
23,
24,
25]. Such studies have mainly explored the influence of an AC network on DC-side stability [
20,
23,
24] and qZSI dynamics [
21,
22]. On the other hand, dynamic interactions between AC and DC networks have not been fully studied yet. Recently, two qZSI-PV system simulation models based on PSCAD and Simulink were introduced in [
25], and these dynamic interactions and qZSI-PV system stability were studied from the proposed models; however, these models (and their corresponding studies) are limited by the features of the PSCAD and Simulink tools, and a qZSI-PV system model based on the small-signal state-space equation is required to have more flexibility in the qZSI-PV system dynamic simulations and stability analysis.
This paper extends the work in [
25] and contributes a fully developed small-signal state-space averaged (SSA) equation of qZSI-PV systems for implementation in customized codes of time domain simulation and stability studies. The equation is systematically and rigorously obtained by considering the main qZSI-PV system controls, i.e., maximum power point (MPP) tracking (MPPT), PV voltage, grid current and qZSI duty cycle controls. The models in [
25] only allow Simulink and PSCAD dynamic studies of qZSI-PV system behavior to be performed, while our model enables the use of different software programs (e.g., Simulink and MATLAB environments), increasing the possibility to carry out qZSI-PV system dynamics studies, such as the following:
PV system stability studies in the frequency domain;
Participation factor (PF) assessments and analytical studies of the influence of PV system parameters on stability;
AC grid-connected PV system dynamics studies based on a single Simulink model of qZSI-PV systems derived from the proposed model.
Here, the contributions to the knowledge of the following stability issues are presented through the application of the proposed equation:
All of these contributions, which are numerically validated by PSCAD simulations, can be used together as a valuable transient modeling tool and in qZSI-PV system stability studies.
2. State-Space Modeling of PV Power Systems
In order to evaluate the qZSI-PV system stability, SSA modeling of the circuit in
Figure 1 is presented based on the following state-space equation:
where
x,
u1,
u2 and
y are the state, internal input, external input and output vectors, respectively, while the small-signal variables are denoted by the symbol Δ.
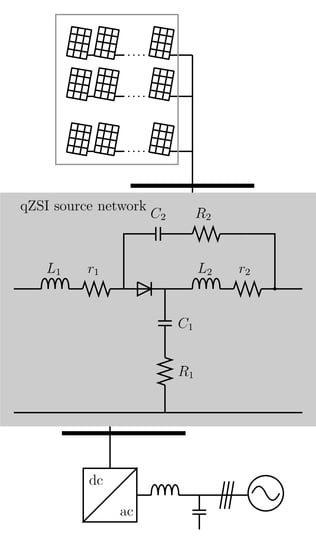
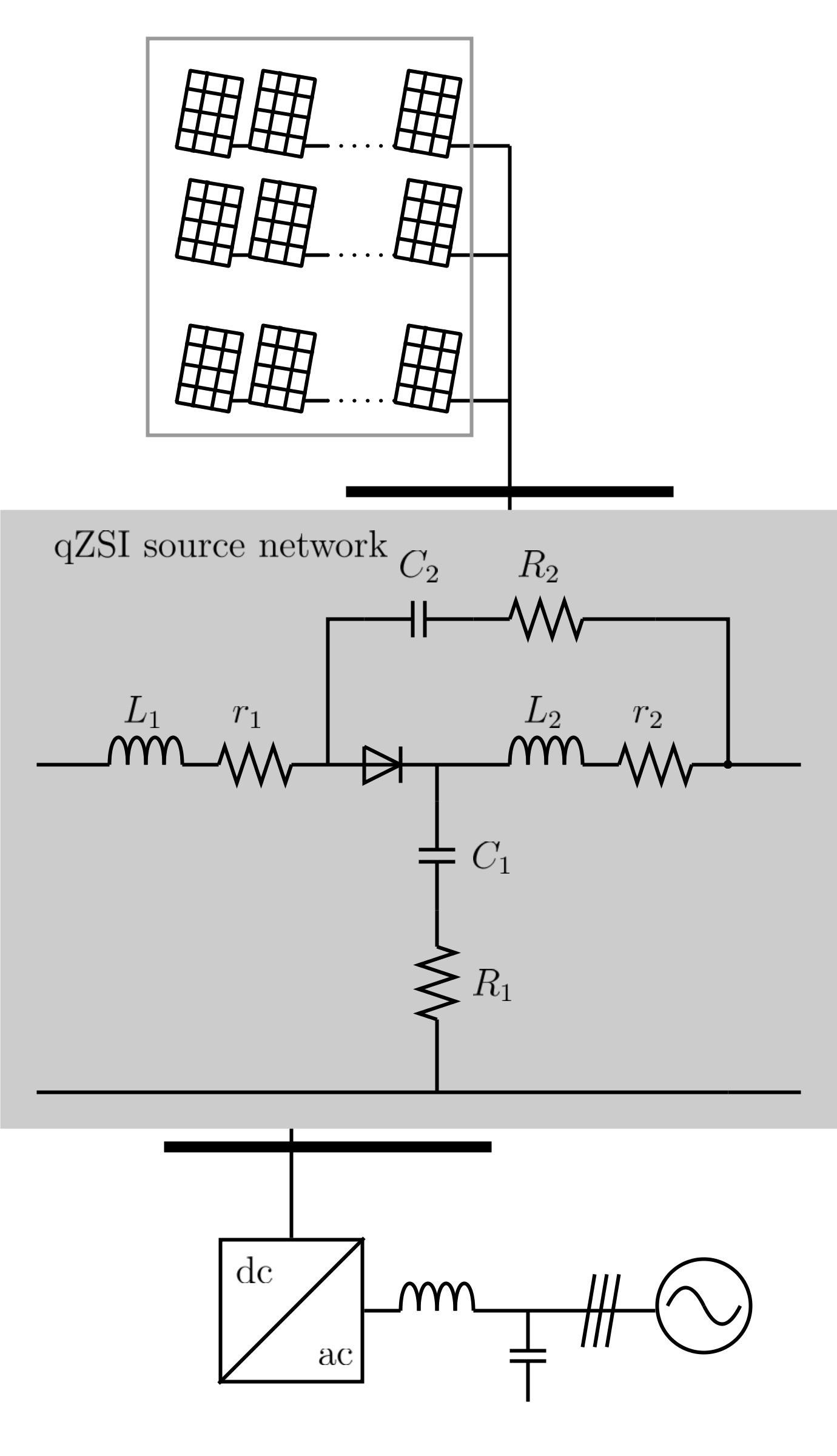
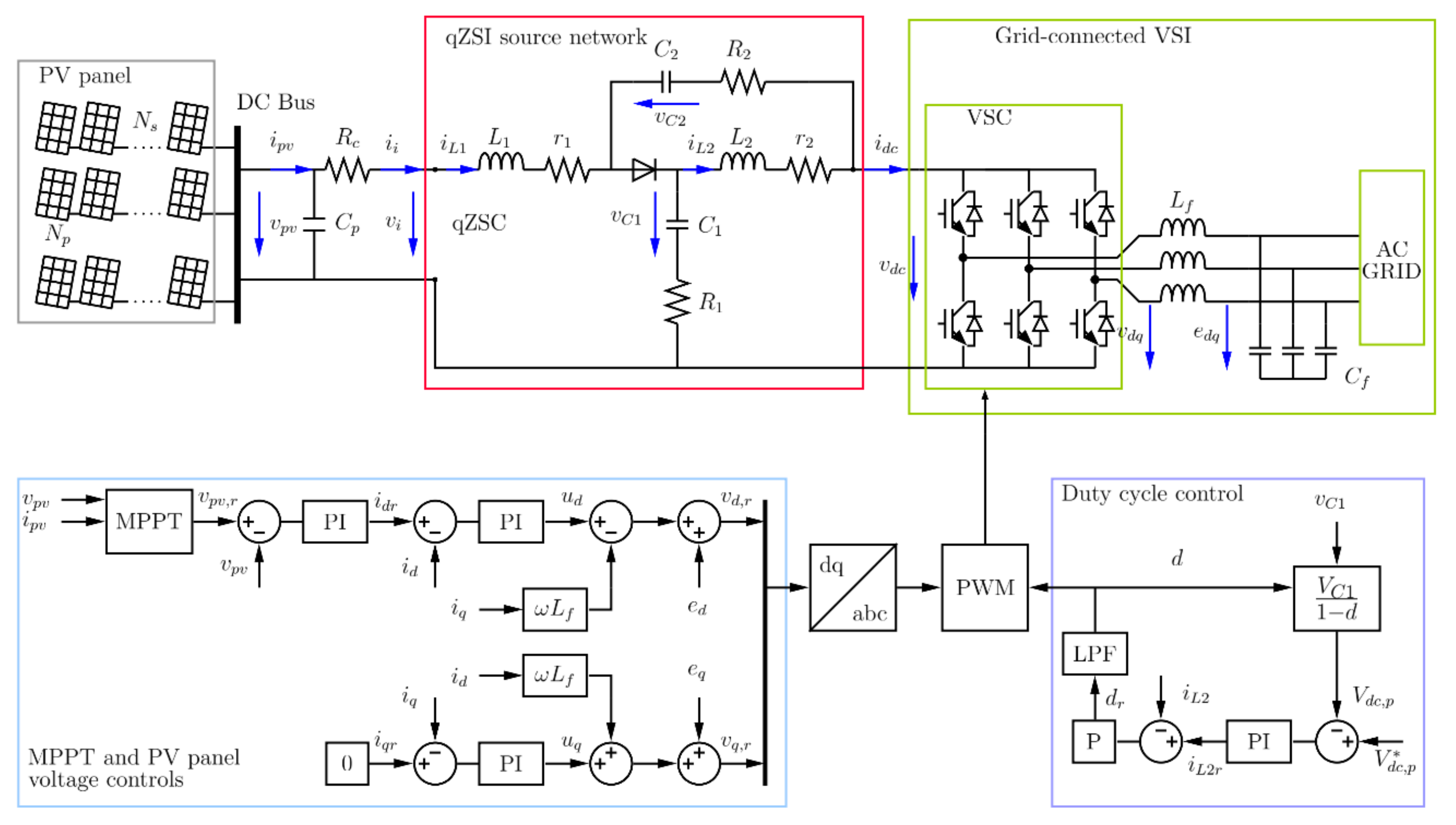
Broadly speaking, qZSI-PV systems have a PV installation supplying the qZSI (i.e., the Np × Ns PV panel, the capacitor Cp and the DC conductor resistance Rc), which allows the output voltage vdc to be boosted at the VSI terminals. The Np × Ns PV panel has Np strings in parallel with Ns PV cells in series.
To fully extract the PV panel’s maximum power, an MPPT algorithm and the voltage control of the PV panel are used. The VSI current control loop fixes the power that the VSI delivers to the grid. The DC peak voltage
vdc,p is adjusted using the qZSI duty cycle control. The pulse width modulation (PWM) block generates the trigger signals of the IGBTs (i.e., the shoot-through states of the qZSI) from the grid
dq-frame reference voltage
vdqr and the duty cycle
d by means of the carrier-based sinewave pulse width modulation method, referred to as simple boost control (see Chapter 4 in [
6]). The dynamic behavior of the qZSI-PV system components is dictated by their SS equations, while the averaging approach for these equations used for characterizing the two qZSI states is also applied for qZSI modeling. The development of SSA equations is well documented in [
25], so only a summary is presented in the following subsections. All qZSI-PV system component equations are turned into a single SSA equation that characterizes the qZSI-PV system dynamics. This equation is validated using PSCAD simulations.
2.1. Model of the PV Installation
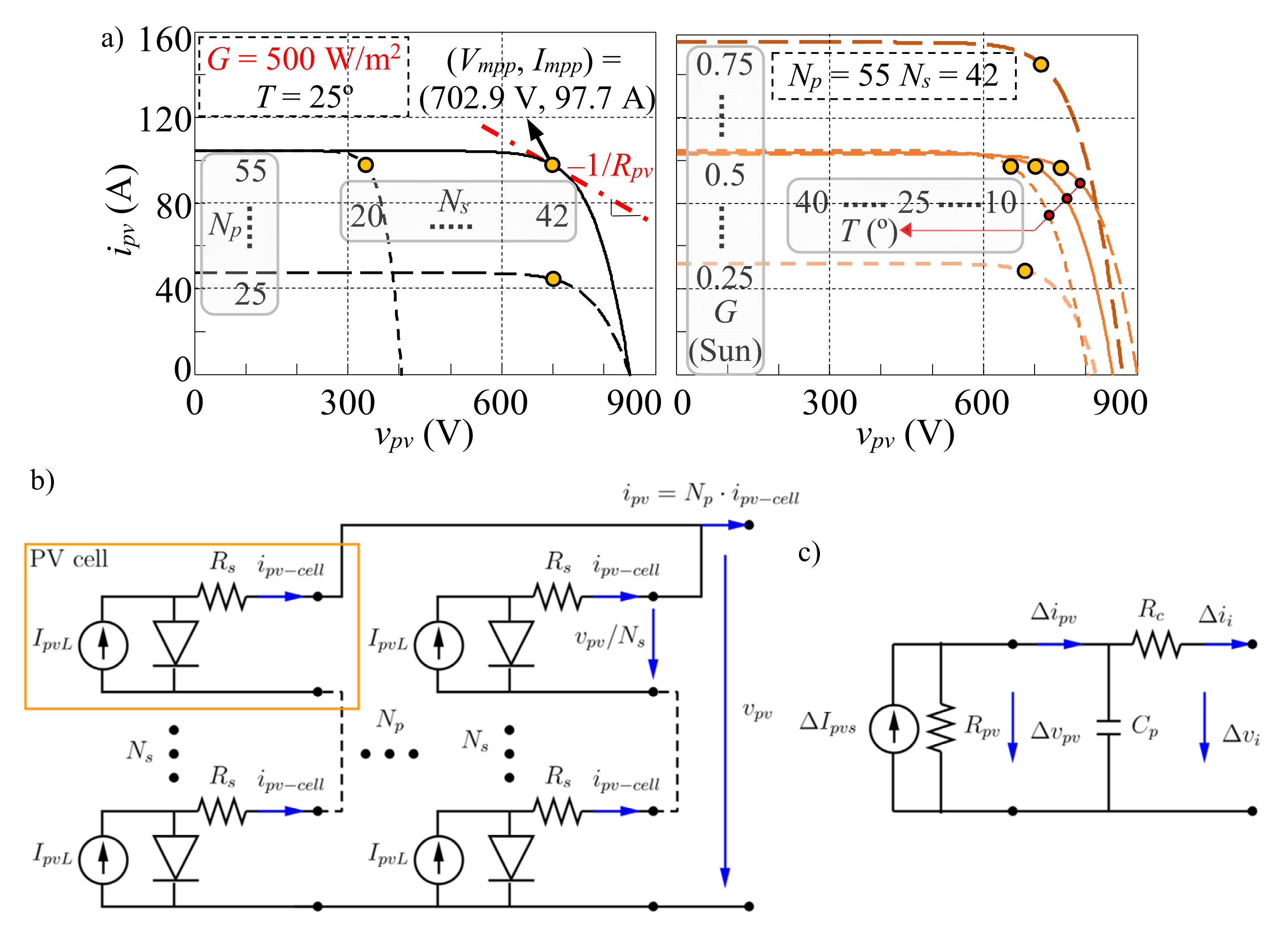
The SS equation for the PV installation is presented in this subsection. A typical I–V plot of a PV panel is shown to highlight the different parameter values in
Figure 2a, where the MPPs of the different I–V plots are labelled with dots. The panel has an
Np ×
Ns 60 W PV Solarex MSX60 module (see specifications in [
2]). It is noted that for a constant irradiance level
G and temperature
T, an increase in the number of PV panels in series
Ns leads to an increase in the voltage of the PV panel
vpv, while the same is true for the number of PV panels in parallel
Np and the current of the PV panel
ipv. This I–V plot of a PV panel is expressed as [
2,
4,
25]:
where
IpvL and
Ipv0 are the photovoltaic and saturation currents of the PV cell,
Rs is the equivalent series resistance of the PV cell,
n is the diode quality factor,
VT =
k·T/q is the thermal constant of the PV cell,
k is the Boltzmann constant (1.38 × 10
−23 J/K),
q is the Coulomb constant (1.602 × 10
−19 C) and
T is the PV cell temperature in Kelvin. The photovoltaic current
IpvL is proportional to the irradiance level
G and is usually referred to as the rated irradiation (i.e.,
G = 1 Sun = 1000 W/m
2). The photovoltaic and saturation currents,
IpvL and
Ipv0, also depend on the temperature
T, which is 25 °C. The influence of both parameters is illustrated on the right side of
Figure 2a.
The I-V plots of PV panels are modeled with the equivalent circuit in
Figure 2b, which is deduced from the linearization of the I-V Equation in (2) around the MPP (
Vpv =
Vmpp and
Ipv =
Impp, see plot on the left in
Figure 2a) [
4,
25]:
where:
The PV panel’s small-signal circuit derived from the linearization of the I-V plots near the PV panel operating point (3), the DC conductor and the shunt capacitor are shown in
Figure 2c, while the SS model is represented by:
The MPPT control generates the PV panel reference voltage with the maximum instantaneous power
ppv =
vpv·
ipv, i.e., the voltage at the MPP. According to [
25], the SS model of the MPPT control is characterized by:
where the variable
ϕpvs is the state-space variable characterizing the dynamic behavior of the MPPT PI control [
25]. This variable does not have a particular physical meaning but it facilitates the development of the state-space model and has the same dimensions as the magnetic flux.
The SS model of the MPPT control and the PV installation is derived from (5) and (6) and represented by:
2.2. Model of the PV Panel Control and Grid-Connected VSI
The set composed of the voltage control loop of the PV panel, the VSI current control and the grid-connected VSI is presented. The PI control loop of the PV panel voltage generates the grid
d reference current
idr of the
dq-frame VSI current control from the PV panel reference voltage (
Figure 1). This VSI current control is represented as a PI-based control, which outputs the grid
dq-frame reference voltage
vdqr to the VSI space vector modulation. The grid
q-reference current
iqr of the
dq-frame VSI current control is fixed to zero by assuming that the power factor of the inverter operation is the unity [
5,
6]. The influence of the inverter PLL on the system dynamics is disregarded.
The small-signal relationship of the grid
d-reference current is:
where
and
are the proportional and integral gains, respectively. The variable
ϕpv is the state-space variable characterizing the dynamic behavior of the PV voltage PI control. This variable does not have a particular physical meaning but it facilitates the development of the state-space model and has the same dimensions as the magnetic flux. According to (8), the SS model of the voltage control of the PV panel is represented by:
The small-signal relationship of the VSC current control output
d-voltage is written as:
where
and
are the compensator’s proportional and integral gains, respectively. The variable
qcc is the state-space variable characterizing the dynamic behavior of the VSC current PI control. This variable does not have a particular physical meaning but it facilitates the development of the state-space model and has the same dimensions as the electric charge; therefore, the SS model of the VSC current control output
d-voltage (10) is expressed as:
The SS model of the grid-connected VSI is derived as [
25]:
With
Lf being the converter filter inductance (the inner resistance of the inductor is neglected). The variable
ϕds is the state-space variable characterizing the dynamic behavior of the SS model of the grid-connected VSI. This variable does not have a particular physical meaning but it facilitates the development of the state-space model and has the same dimensions as the magnetic flux; thus, the SS model of the grid-connected VSI is:
It must be noted that the converter filter capacitor Cf does not appear in the SS model of the grid-connected VSI, meaning this capacitor does not affect the qZSI-PV system model or dynamics. It is considered as a component of the grid in the stability studies of grid-connected qZSI-PV systems.
The SS model of the PV panel voltage, VSI current control and the grid-connected VSI is derived from (9), (11) and (13) and expressed as:
2.3. Model of the qZSI
The SSA model of the qZSI in
Figure 1, which considers the parasitic resistances
r of the inductors and series resistances
R of the capacitors is outlined in this subsection. The qZSI has two different operational states within one switching cycle, i.e., the shoot-through and the non-shoot-through states during
T0 (the inverter behaves as a short circuit) and
T1 (the inverter behaves as a current source representing VSI consumption), respectively [
6,
14,
25]. The former is identified by the duty cycle
d =
T0/
T and the latter by
T1/
T = 1 −
d. The qZSI control is also plotted in
Figure 1, where the duty cycle is obtained to adjust the DC peak voltage
vdc,p [
6,
14].
2.3.1. Model of the Power Circuit
The SSA model of the qZSI is expressed from the SS equations of the qZSI operational states (i.e., shoot- and non-shoot-through states) according to
Figure 1 as [
6,
25]:
Finally, the SSA model of the qZSI is expressed from (15) as [
6,
25]:
where
D is the steady-state duty cycle, while
V1 =
VC1 +
VC2 −
R·Idc,
I1 =
Idc −
IL1 −
IL2,
V2 = −
V1 +
R·I1 and
Xz = [
IL1 IL2 VC1 VC2]
T and
U1z = [
Vi Idc]
T are the state and input vectors in steady state, respectively. The steady-state voltages and currents are determined by imposing
dx/
dt = 0 in the SSA model of the qZSI, (1) and (15) [
6].
The qZSI input vector (i.e., the qZSI input voltage
vi and output current
idc) is obtained from the SS model of the PV installation (2–5) and the power balance in the VSI, respectively. Assuming a lossless VSI, the AC and DC instantaneous power balance in the circuit of
Figure 1 can be written as [
25]:
where
md0 =
Vd/
Vdc is the modulation function’s steady-state operation point,
Gdc = 1/
Rdc = −
P/
, with
P being the active power delivered from DC to AC (see
Figure 1) and
Vd,
Vdc and
Idc being the inverter output voltage, the qZSI voltage and the current in steady state, respectively.
The power balance’s small-signal relationship in (17) can be rewritten with (5), (10) and (12) as follows:
where
Gdcm =
Gdc/
md0 and:
It must be highlighted that the virtual conductance Gdc relates the current idc and the voltage vdc, while the negative value of this conductance for the VSI inverter operation (P > 0) causes the VSI non-passive behavior on the DC side. This may lead to system instability at certain resonances.
Any factor increasing the VSI input flow of the active power
P (e.g., the number of PV or the irradiance level) affects the qZSI-PV power system’s stability (see
Section 3). On the other hand, any factor reducing the value of
Gdc (e.g., a higher steady-state qZSI output voltage
Vdc) improves the qZSI-PV system’s stability (see
Section 3). Nevertheless, it must be considered that increasing the qZSI output voltage
Vdc could lead to higher switch stress and a lower voltage utilization ratio.
2.3.2. Model of the Duty Cycle Control
The qZSI control in
Figure 1 adjusts the DC peak voltage
vdc,p by using the duty cycle
d. The DC voltage PI control loop imposes the DC peak voltage reference
, while the inductor-
L2 current loop imposes the inductor-
L2 current reference
iL2 through a proportional controller to improve the dynamic response of the control [
6,
14]. A low-pass filter (LPF) with a corner frequency
fc = 25 Hz (i.e., a bandwidth
ωc = 2π
fc) smooths the reference duty cycle supplied to the qZSI.
According to [
25], the SS model of the duty cycle control is characterized by:
where
and
are the proportional and integral gains of the DC voltage controller and
is the proportional gain of the inductor-
L2 controller. The SS model of the LPF is characterized by:
The SSA model of the duty cycle control is written from (20) and (21) as:
2.3.3. Complete Model of the qZSI
The SSA model of the qZSI in
Figure 1 is derived from (16) and (22) and represented by:
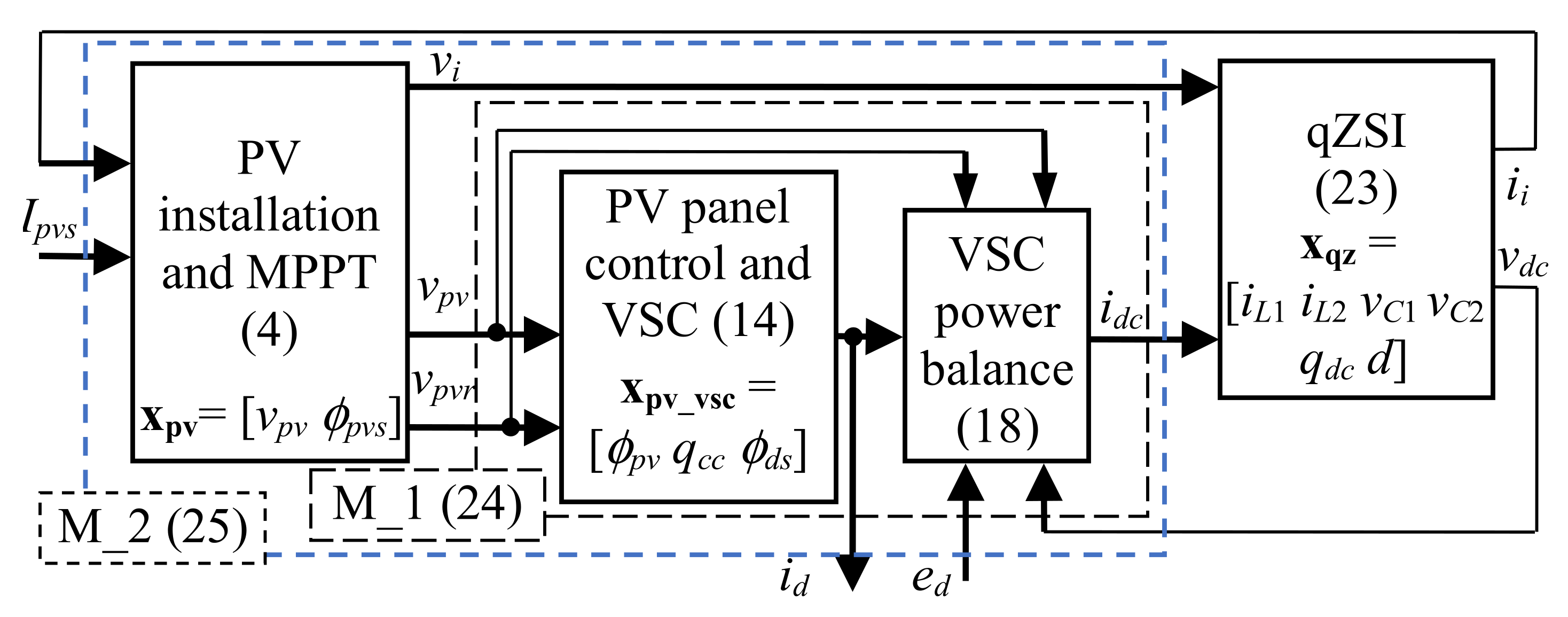
2.4. Model of the qZSI-PV System
The diagram of the qZSI-PV system with the small-signal models of all the components is presented in
Figure 3, according to the previous sections. The SSA models (1) of the qZSI-PV system modules before obtaining the complete qZSI-PV system are shown in this subsection.
Module #1 (M_1 in
Figure 3): The PV panel control and grid-connected VSI (14), including the VSI power balance (18), are expressed as:
Module #2 (M_2 in
Figure 3): The PV installation (4) and the PV panel control, grid-connected VSI and VSI power balance (24) are represented by:
where
Finally, the SSA model of the qZSI-PV system is obtained from (23) and (25) as:
where
xs = [Δ
vpv Δ
ϕpvs Δ
ϕpv Δ
qcc Δ
ϕds Δ
iL1 Δ
iL2 Δ
vC1 Δ
vC2 Δ
ϕdc Δ
d]
T,
u2s = [Δ
Ipv Δ
ed]
T,
ys = [Δ
id] and
I2×2 is the 2 × 2 identity matrix.
Unlike the Simulink and PSCAD models in [
25], the SSA model in (27) can be custom programmed to create a software tool for studying qZSI-PV system dynamics in time and Laplace domains. This is a relevant contribution in assessing qZSI-PV system dynamic behavior.
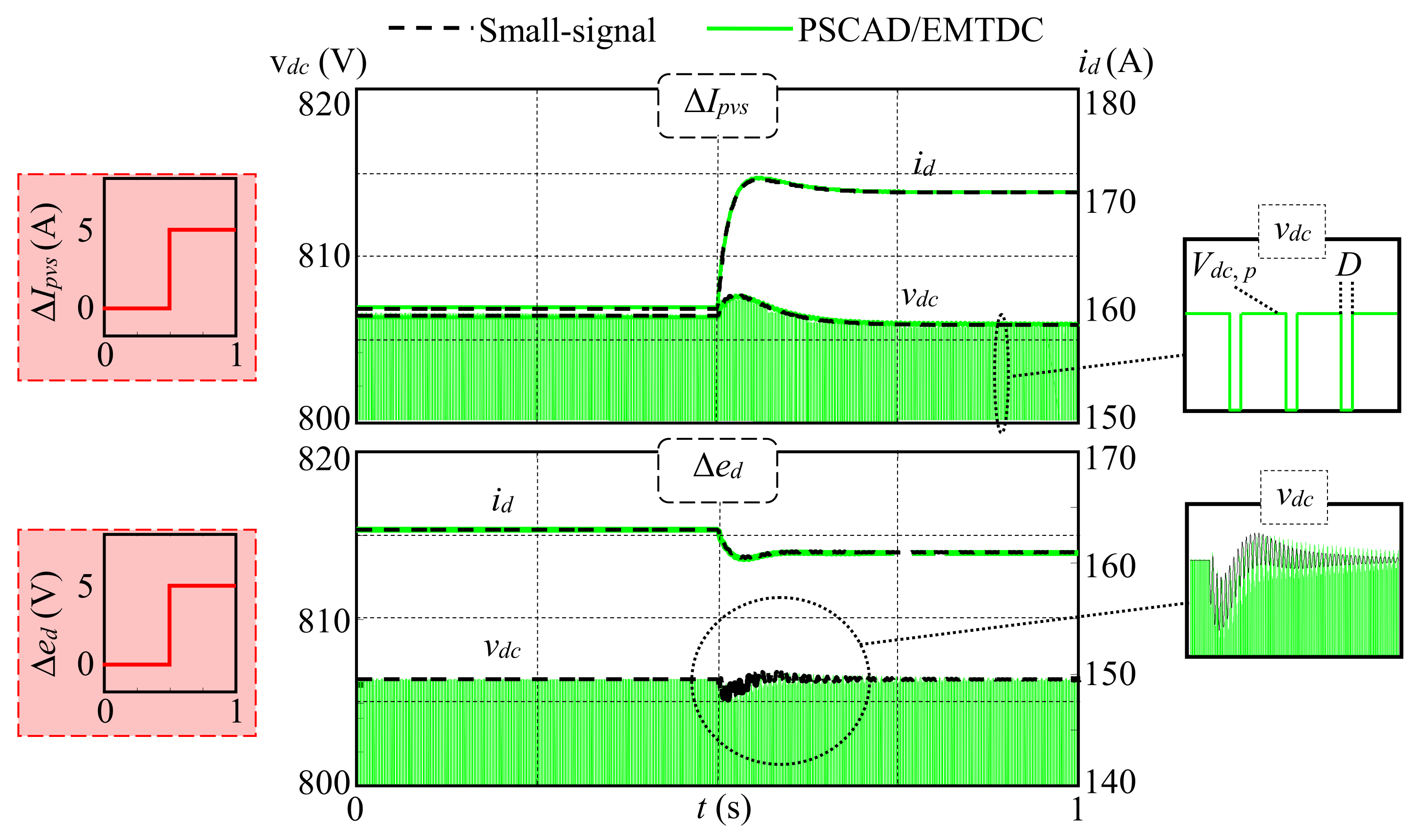
2.5. Validation of the qZSI-PV System Model
The SSA model (27) of the qZSI-PV system shown in
Figure 1 involving the data shown in
Table 1 is validated in
Figure 4. The PV panel delivers 1 kV 140 kW to a DC power system connected to an ideal 0.4 kV AC network. In the validation, the PV panel has a 55 × 42 60 W PV Solarex MSX60 module [
2] with an irradiance level of
G = 500 W/m
2 and a temperature
T = 25 °C, while the qZSI works with a duty cycle
D = 0.06.
The transient performance of the DC peak voltage
vdc and the grid
d-current
id is studied when a small perturbation of 5 A and 5 V around the operating point values of the PV panel current
Ipvs (94 A) and the grid
d-voltage
ed (400 V) is introduced (see red plots in
Figure 4). The fair accuracy of the qZSI-PV system model is validated by comparing its dynamic response to PSCAD/EMTDC simulations obtained with the circuit in
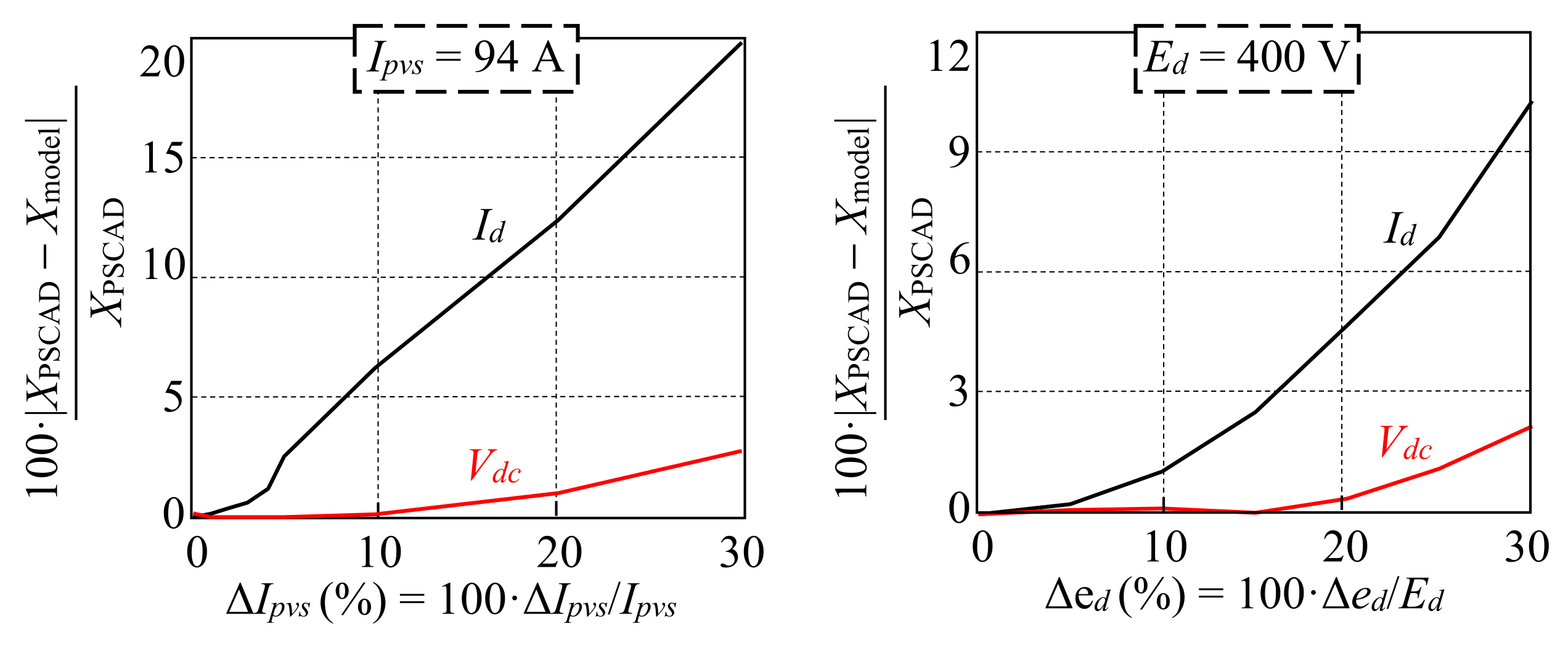
Figure 1. It must be noted that the qZSI-PV system model must be validated with a small perturbation around the operating point because it is a small-signal model that cannot reproduce the dynamics related to significant changes in the the qZSI-PV system operating point. In order to illustrate the previous comment,
Figure 5 shows the stationary deviations (differences between PSCAD/EMTDC and the small-signal model results) of the DC peak voltage
vdc and the grid
d-current
id for different perturbations of
Ipvs and
ed. It can be observed that the validity of the model highly depends on the variables of the model (e.g., an
Ipvs perturbation of 20% leads to a non-acceptable error of 12% in the stationary value of the grid
d-current). In general, the accuracy of the small-signal model is fair for perturbations smaller than 10%.
3. Examples
Stability problems in the qZSI-PV system shown in
Figure 1 are analyzed with the data shown in
Table 1 and using the proposed SSA model. Solutions to mitigate instabilities are also discussed. The PV panel delivers 1 kV 140 kW to a DC power system connected to an ideal 0.4 kV AC grid. Note that an ideal AC grid is considered in this study because we only analyze the qZSI-PV system dynamics and not the interaction between the qZSI-PV system and the grid. In such conditions, the VSI filter capacitor
Cf does not affect the obtained results. If the dynamic interaction between the qZSI-PV system and the grid were to be studied, a weak AC grid should be considered. In this case, the capacitor Cf affects the system behavior. The usual range of 1–1.5 kV DC for large-scale PV power systems (
Ppv > 10 kW) is considered in the application. This voltage level reduces the initial investment and total cabling required [
6,
19,
24]. In the application, the PV panel is based on PV Solarex MSX60 modules and configured with 42 modules connected in series and 55 arrays connected in parallel. The module manufacturer data give the following information:
Voc = 21.0 V,
Isc = 3.7 A,
Vmax = 17.2 V,
Imax = 3.6 A,
Pmax = 60.0 W at
G = 1000 W/m
2 [
2]. The voltage and current MPP values corresponding to
G = 500 W/m
2 are
Vmpp = 16.7 V and
Impp = 1.8 A. These MPP values yield a PV panel voltage
Vpv = 702.9 V, PV panel current
Ipvs = 97.35 A and a power
Ppv = 68.2 kW. The analyzed cases are based on these values. It is also worth noting that the IGBT switching frequency
fsw is set to 10 kHz as in [
6,
15,
17].
The system stability is investigated using the SSA model of the qZSI-PV system in
Section 2 and PSCAD and PSIM simulations in the following three cases:
Case #1 (reference case): This is the stable operating point at steady state with
Np = 55,
Ns = 42,
G = 500 W/m
2 and
T = 25 °C (
Vmpp = 702.9 V,
Impp = 97.7 A; see left of
Figure 2a);
Case #2: The influence of the irradiation level
G on PV system stability is studied. The stability of the steady-state operating point in case #1 when the irradiation level increases to
G = 800 W/m
2 (
Vmpp = 712.3 V,
Impp = 156.4 A; see right of
Figure 2a) is analyzed;
Case #3: The impact of the total number of PV arrays connected in parallel
Np on the PV system stability is studied. The stability of the steady-state operating point in case #1 when
Np increases to
Np = 100 (
Vmpp = 702.9 V,
Impp = 177.8 A; see left of
Figure 2a) is analyzed.
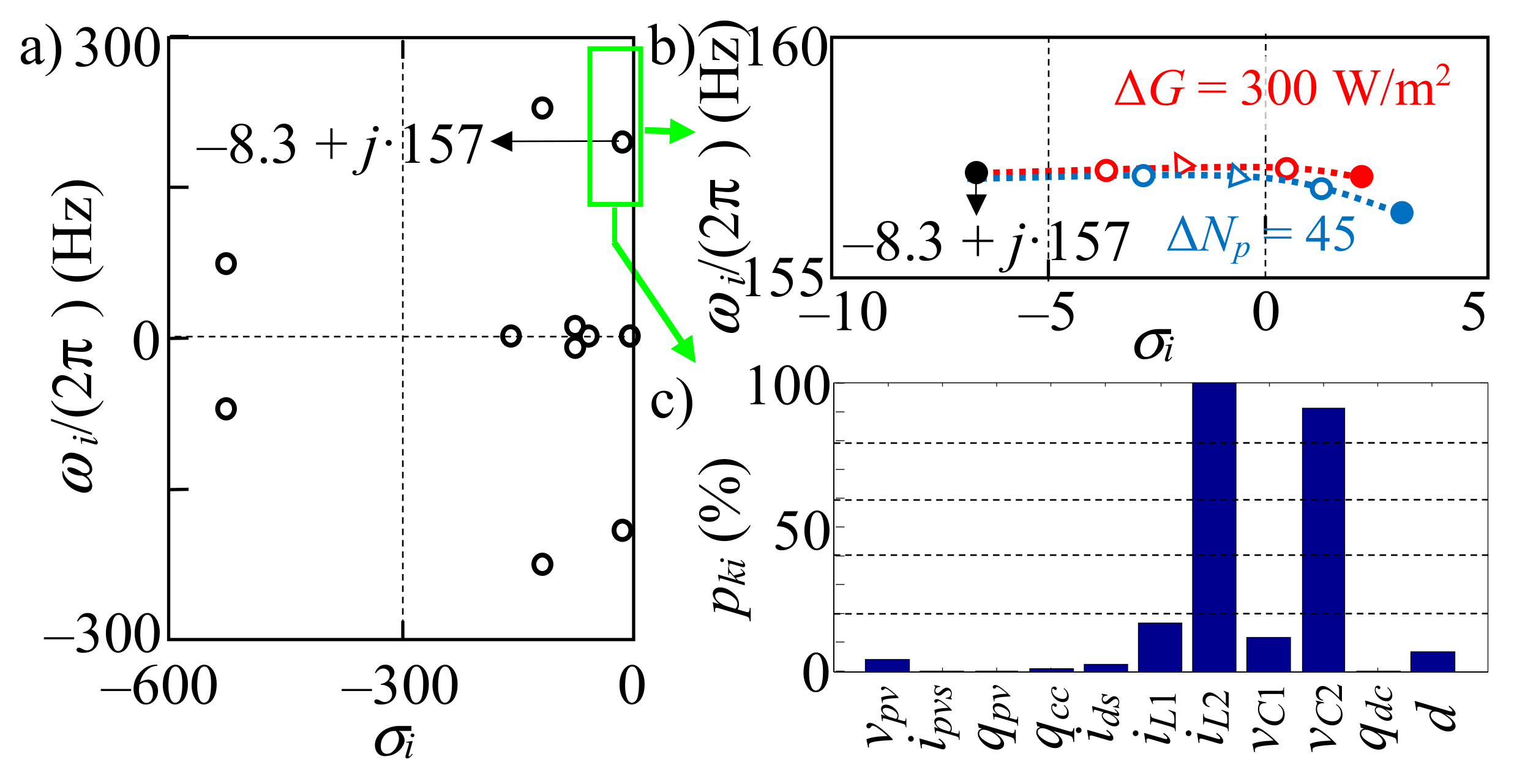
Case #1’s eigenvalues λ
i = σ
i + j·ω
i are derived from the SSA model of the qZSI-PV system, while the terms σ
i and ω
i/(2π) are shown in
Figure 6. These eigenvalues verify the system stability because they are not in the right half-plane (RHP).
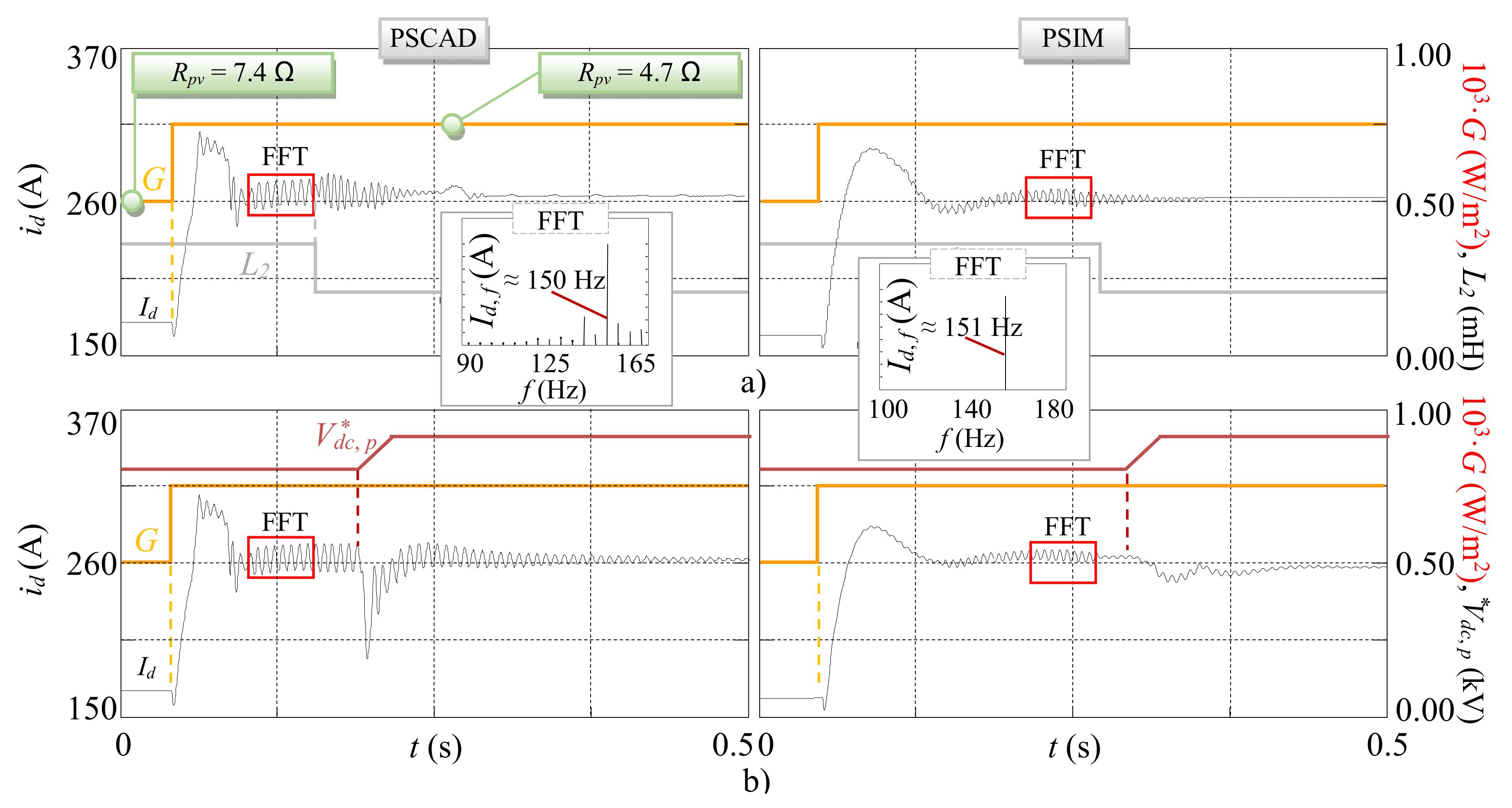
Figure 6b shows the trajectories of the eigenvalues related to the unstable mode if the irradiance level
G (case #2) or the number of PV panels in parallel (case #3) is varied. It is worth noting that as pointed out in
Section 2.3.1, a higher irradiance level or number of PV arrays connected in parallel causes system instability because the eigenvalue of the oscillatory frequency
fi = ω
i/(2π) = 157 Hz moves into the RHP. This is illustrated in the PSCAD and PSIM time domain simulations of
Figure 7, whereby the increase of
G from 500 W/m
2 to 750 W/m
2 causes system instability. This increase carries from one PV power system operating point to another and the parameters of the PV power system model are updated accordingly. As an example, the resistance
Rpv value of the PV installation small-signal equivalent circuit in
Figure 2c is labelled in
Figure 7 for the two irradiance levels. As the simulation programs used in the study do not include any PV panel model, the PV panel small-signal circuit derived from the linearization of the I-V plots near the PV panel MPP, shown in (3) and
Figure 2c, is applied. According to this, the resistance
Rpv value of the PV panel small-signal equivalent circuit in (4) is updated from the MPP values. These values are obtained from the I-V plot of a PV panel [
4,
25] and the MPPT control depending on the value of the PV panel variables (i.e.,
Np,
Ns,
G and
T in
Figure 2a). The PV panel tries to supply the rated power of the PV power system after the irradiance level steps up but the PV power system becomes unstable, while the frequency of unstable oscillations measured in the PSCAD and PSIM simulations (i.e., ≈150 Hz) approximately matches the oscillatory frequency of the eigenvalue. Note that although the time domain simulation of PSCAD and PSIM is not exactly the same, both simulations verify the previous results. The same is true for higher numbers of PV arrays connected in parallel, which are not shown here for the sake of time.
In order to obtain solutions to improve the qZSI-PV system stability, the PFs of each state-space variable
k (see
Figure 3) on each mode
i are calculated as
pki = φ
ki·ψ
ik, with φ
ki and ψ
ik being the components of the right and left eigenvectors, respectively. According to this,
Figure 6c shows the PFs of the eigenvalue related to the unstable mode. The results indicate that the qZSI inductors (
L1 and
L2) and capacitors (
C1 and
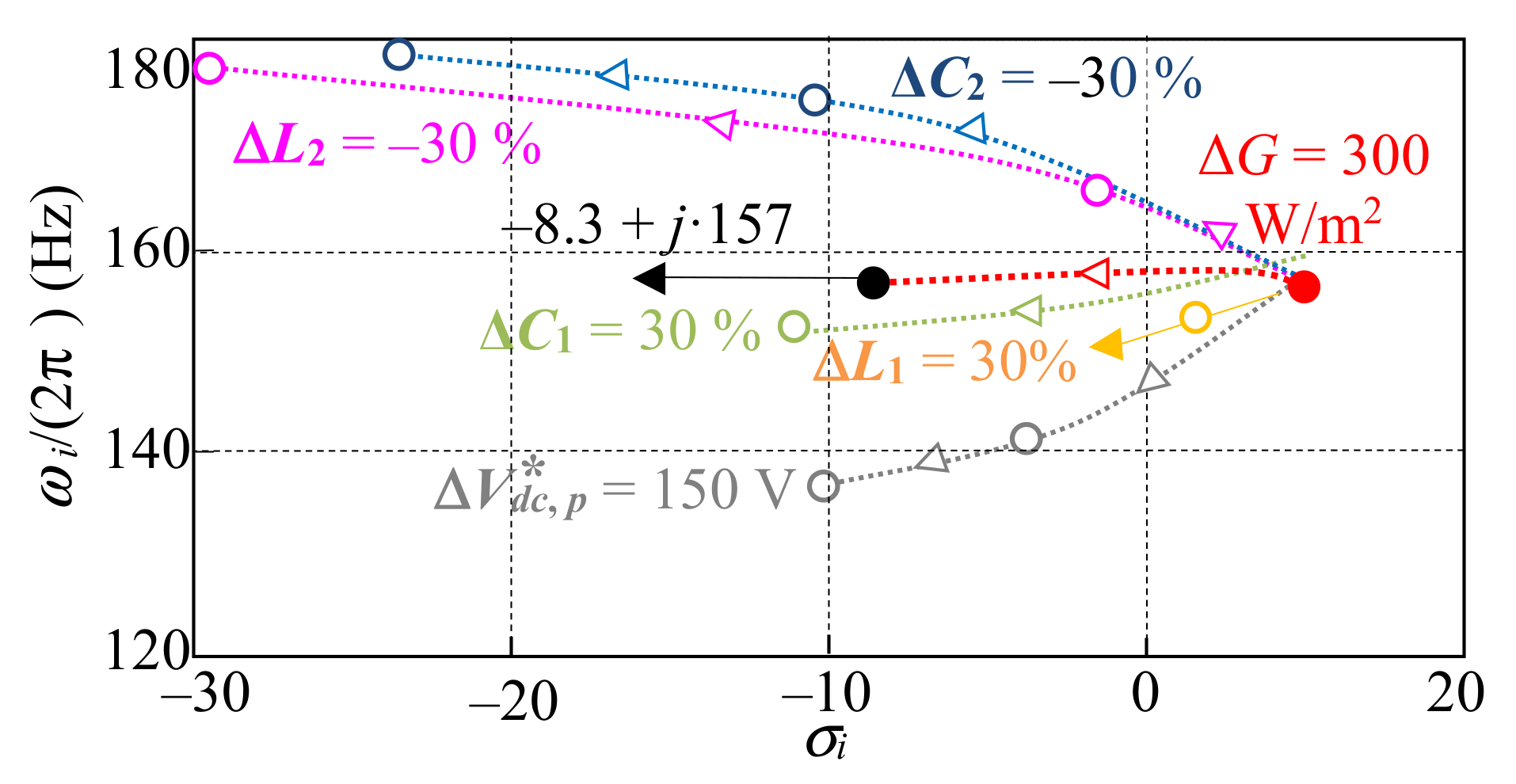
C2) have the largest PFs for the unstable mode, suggesting that qZSI-PV system stability could be improved by modifying the above qZSI parameters. This possibility is verified with the trajectories of the eigenvalue related to the unstable mode when the qZSI-PV system is operating under case #2 conditions and the inductors and capacitors are varied (see
Figure 8). It is noted that lower
L2 and
C2 and higher
L1 and
C1 lead to system stability because the eigenvalue moves out of the RHP.
In light of the above, qZSI-PV system stability should be considered in qZSI inductor and capacitor design; however, as these values are usually compromised by qZSI performance [
6], it is interesting to look for other approaches to improve the qZSI-PV system stability by means of control or external variables. According to
Section 2.3.1, the increase of the steady-state qZSI output voltage
Vdc reduces the virtual conductance
Gdc (18), improving the qZSI-PV system stability; thus, the peak voltage reference
seems to be a suitable candidate that can be used as an external variable to upgrade the qZSI-PV system stability. This solution is validated with the trajectory of the eigenvalue related to the unstable mode when the qZSI-PV system is operating under case #2 conditions and the DC peak voltage reference
increases from 800 to 950 V (see
Figure 7b). This allows system stability to be obtained because the eigenvalue moves out of the RHP, although increasing the qZSI output voltage
Vdc could lead to higher switch stress and a lower voltage utilization ratio.
The stability studies show that:
The impacts of qZSI inductors and capacitors on qZSI dynamic behavior [
8] are extended to qZSI-PV system transient performance;
The qZSI-PV system operating points, particularly the active power
P delivered to the AC grid and the steady-state qZSI output voltage
Vdc, have an impact on instability. The study of the duty cycle in [
21,
22] is related to the previous impacts of voltage
Vdc.
The PSCAD and PSIM simulations in
Figure 7 verify the above conclusions. The decrease of
L2 from 0.3 mH to 0.24 mH (Δ
L2 = −20%) and the increase of
from 800 V to 950 V (
= 150 V) return the qZSI-PV system to stability after becoming unstable due to the growth in the irradiance level. Although not shown for the sake of space, the same is true for the above parameters.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}