
A Critical Look at Coulomb Counting Approach for State of Charge Estimation in Batteries



Abstract
:1. Introduction
- (i)
- OCV-SOC modeling error. The OCV-SOC relationship of a battery can be approximated through various models [6]: linear model, polynomial model and combined models are a few examples. Reducing the OCV-SOC modeling error is an ongoing research problem—in [11], a new modeling approach was reported that resulted in the “worst case modeling error” of about 10 mV. It must be mentioned that the OCV modeling error is not identical in all voltage regions of the battery.
- (ii)
- (iii)
- Voltage measurement error. Every voltage measurement system comes with errors; this translates into a SOC estimation error.
- Initial SOC: This methods requires initial SOC to start with.
- Current measurement error: The measurement error will affect the computed SOC.
- Current integration error: The Coulomb counting method uses a very simplified approximation to integration, which will result in errors.
- Timing oscillator error: Any error in the timing oscillator will affect the computed SOC.
- (I)
- Kalman filter. Here, the following assumptions need to be met. The state-space model is known and linear, i.e., the functions and in (4) are linear in terms of SOC, and the ‘parameter’ and the current in (4) are known with negligible uncertainty in them. The process and measurement noises, and , respectively, are i.i.d. Gaussian with known mean and variance.
- (II)
- Extended/unscented Kalman filter. Here, only the linearity assumption is relaxed, i.e., the functions and in (4) can be non-linear in terms of SOC. All other assumptions for the Kalman filter need to be met, i.e., the model parameters and the noise statistics need to be perfectly known and the process and measurement noises need to be i.i.d. Gaussian with known mean and variance.
- (III)
- Particle filter. Compared to the Kalman filter assumptions, the particle filter allows to relax both linear and Gaussian assumptions. Here, the and can be non-linear, and both process and measurement noise statistics can be non-Gaussian. It needs to be re-emphasized that, similar to the cases in (I) and (II) above, the models and and the parameters of the noise statistics need to be perfectly known.
- (a)
- Five sources of error in defining the process model (3), namely, the initial SOC error, current measurement error, current integration error, battery capacity error, and timing oscillator error.
- (b)
- Three sources of error in defining the measurement model (4), namely, the OCV-SOC modeling error, voltage-drop modeling and its parameter estimation error, and voltage measurement error.
- (c)
- The process noise : The statistical parameters of the process noise should be computed based on the knowledge about the statistics of the five error sources in (a) above.
- (d)
- The measurement noise : The statistical parameters of the measurement noise should be computed based on the knowledge about the statistics of the three error sources in (b) above.
1.1. Background
- Too-small process noise: When the process noise is smaller than the reality, the filter will compute the weights such that the measurements are ignored.
- Too-large process noise: When the process noise is larger than the reality, the variance of the filtered estimates will be high.Consequently, the benefits of using a filter will be lost.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Publication | Filtering Method | Definition of Process Noise |
|---|---|---|
| [39] (page 279) | Extended Kalman filter | “small” |
| [40] (page 1370) | Unscented Kalman filter | “stochastic process noise or disturbance that models some unmeasured input which affects the state of the system” |
| [41] (page 7) | Kalman filter | “process noise” |
| [42] (page 334) | Frisch scheme based bias compensating recursive least squares | “zero-mean white noise with variance ” |
| [43] (page 8954) | Extended Kalman filter | “zero-mean white Gaussian process noise” |
| [44] (pages 13,205, 13,206) | Adaptive unscented Kalman filter | “zero-mean Gaussian white sequence”; “in practice, the mean and covariance of process noise is frequently unknown or incorrect” |
| [45] (page 4610) | Extended Kalman filter | “The EKF assumes knowledge of the measurement noise statistics. Moreover, any uncertainty in the system’s model will degrade the estimator’s performance” |
| [46] (page 10) | Correntropy unscented Kalman filter | “CUKF assumes that the process noise covariance and measurement noise are known. They are, however, in real time in nature and may not be obtained in advance in practice. As a result, they should be kept up to date with changes in time based on prior information.” |
| [47] (page 166,660) | Adaptive weighting Cubature particle filter | “” where is the covariance matrix. “In the process of practical application, the statistical characteristics of the process noise and measurement noise of the system are highly random and vulnerable to external environmental factors.” |
| [48] (page 8614) | Extended Kalman filter | “Model bias is one of the existing inefficiency of the model in representation of real physical systems because of the supposition and simplifications.” |
| [49] (pages 5, 8) | Adaptive square-root sigma-point Kalman filter | “ refers to process noise, which represents unknown disturbances that affect the state of the system”; “usually, covariance matrices are constant parameters determined offline before the estimation process begins. In practice, the characteristics of noises vary depending on the choice of sensors and the operating conditions.” |
1.2. Summary of Contributions
- Exact computation of Coulomb counting error. With realistic numerical examples, we demonstrate the errors and their severity during Coulomb counting. Further, we derive mathematical formulas to determine these errors such that the statistical confidence in the SOC estimates can be explicitly stated.
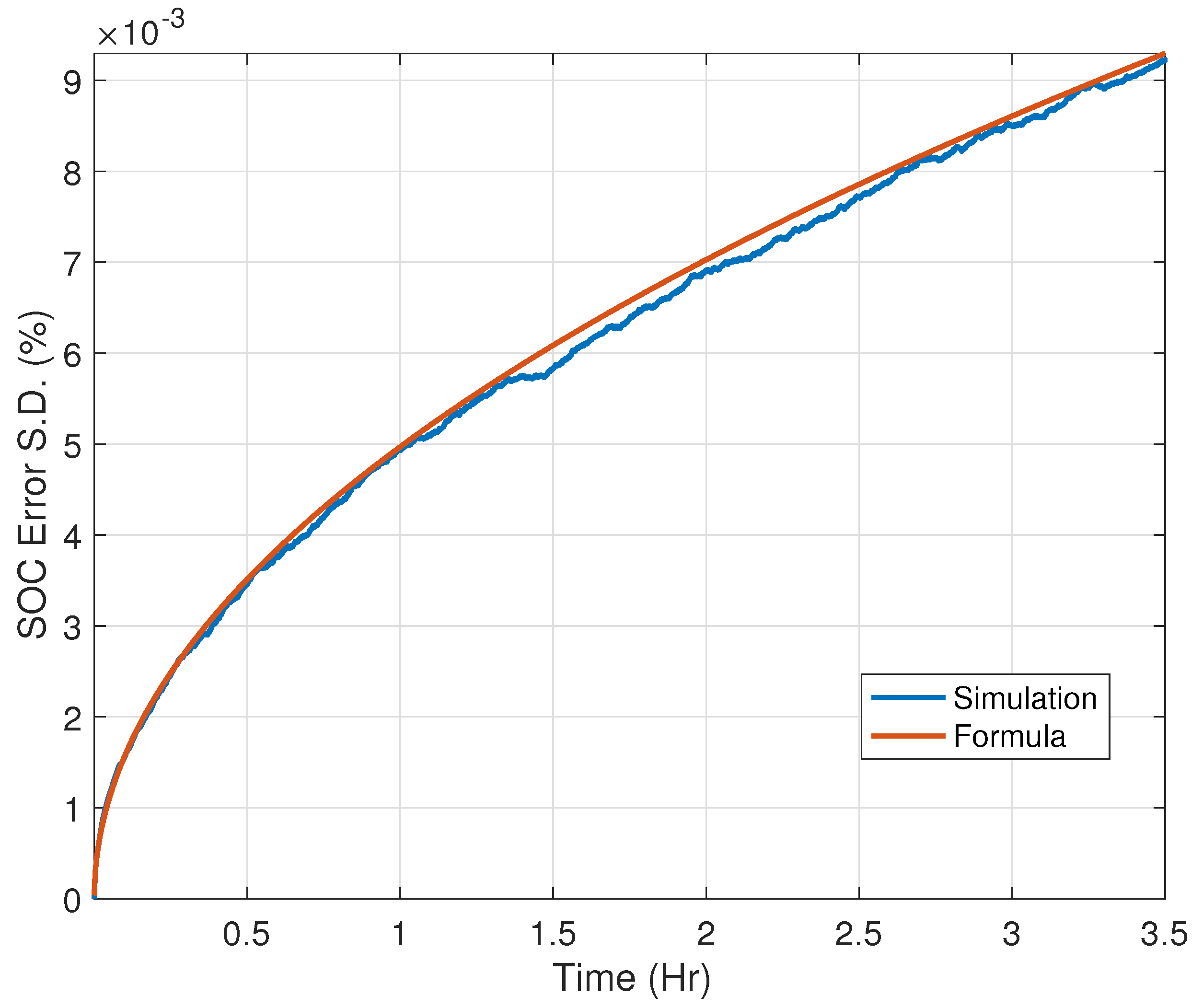
- Five different error sources in Coulomb counting are analyzed. We derive the exact standard deviation and mean error (with time), due to all five possible sources of errors during Coulomb counting: current measurement error, current integration error, battery capacity uncertainty, charge/discharge efficiency uncertainty, and timing oscillator error. It is demonstrated that the resulting error will fall into one of the following two categories: time-proportional errors and SOC-proportional errors.
- Time proportional errors increase indefinitely. We demonstrate that the standard deviation of the time-proportional error approaches infinity as the number of samples reaches infinity.
- State of charge proportional errors reach worst case within one cycle. It is shown that the errors due to battery capacity uncertainty and timing oscillator drifts reach their peak values within one discharge/charge cycle. In addition, the standard deviation of these errors vary with the accumulated SOC. The proposed exact model can be used to improve the SOC estimation by incorporating them in state-space models, e.g., the proposed model can be used to improve the extended Kalman filter-based SOC estimation techniques [3].
- Accurate state-space models for real-time state-of-charge estimation. The models were presented in a way that their applicability in state-space models is explicit. The proposed models can be used to improve the accuracy of virtually all online filtering approaches, i.e., those based on extended Kalman filter, unscented Kalman filter, particle filter, etc., that were employed for real-time SOC estimation.
1.3. Organization of the Paper
2. Problem Definition
- Measurement error in the current .
- Error because of the approximation used for the integration in (8).
- Unreliability in the battery capacity knowledge .
- Uncertainty in the knowledge of the Coulomb counting efficiency .
- Measurement error in sampling time .
3. Individual Uncertainty Analysis
3.1. Effect of Current Measurement Error
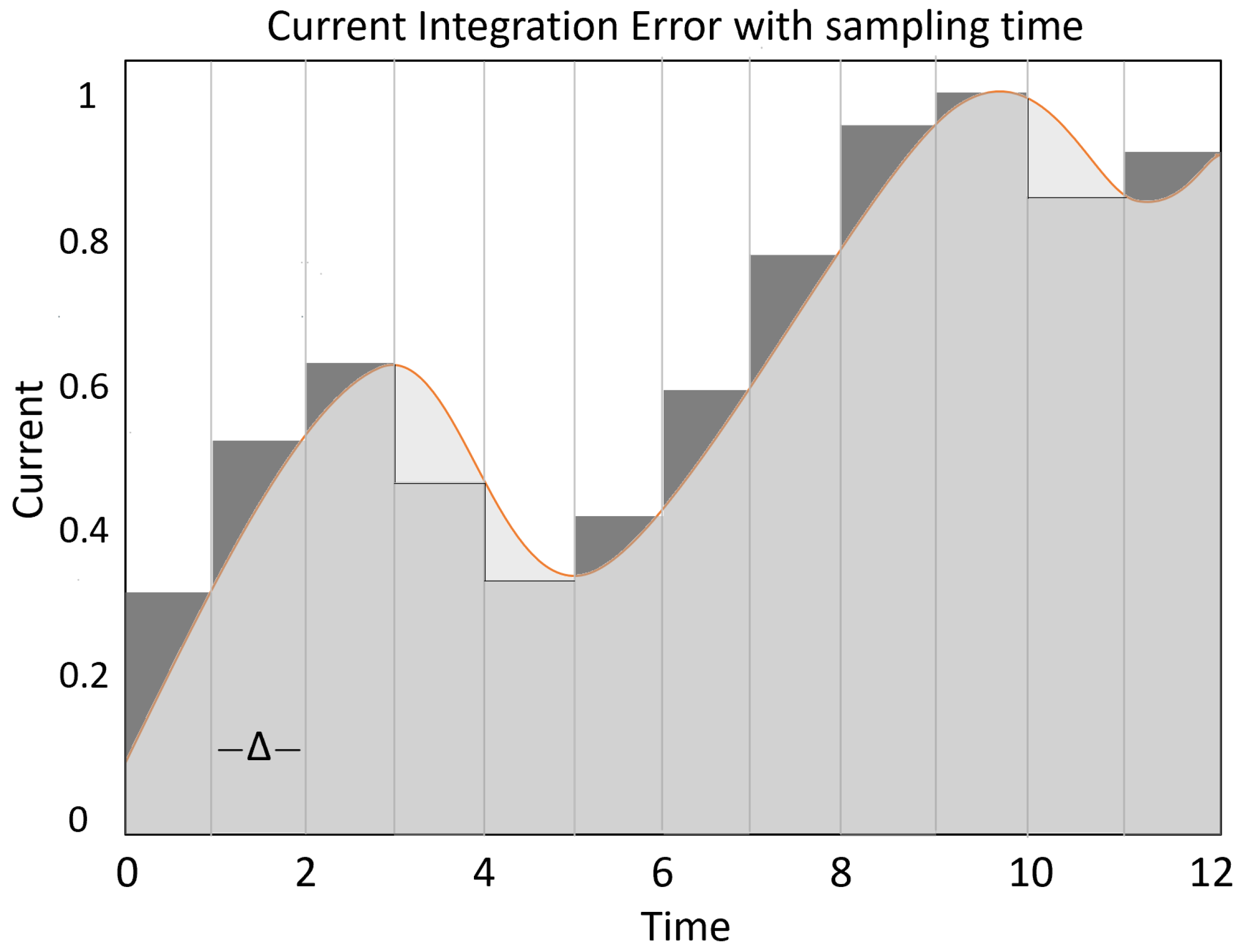
3.2. Effect of Approximating Current Integration
3.3. Effect of the Uncertainty in Battery Capacity
3.4. Effect of the Uncertainty in Charging Efficiency
3.5. Effect of the Uncertainty in Timing Oscillator
4. Summary of Individual Errors
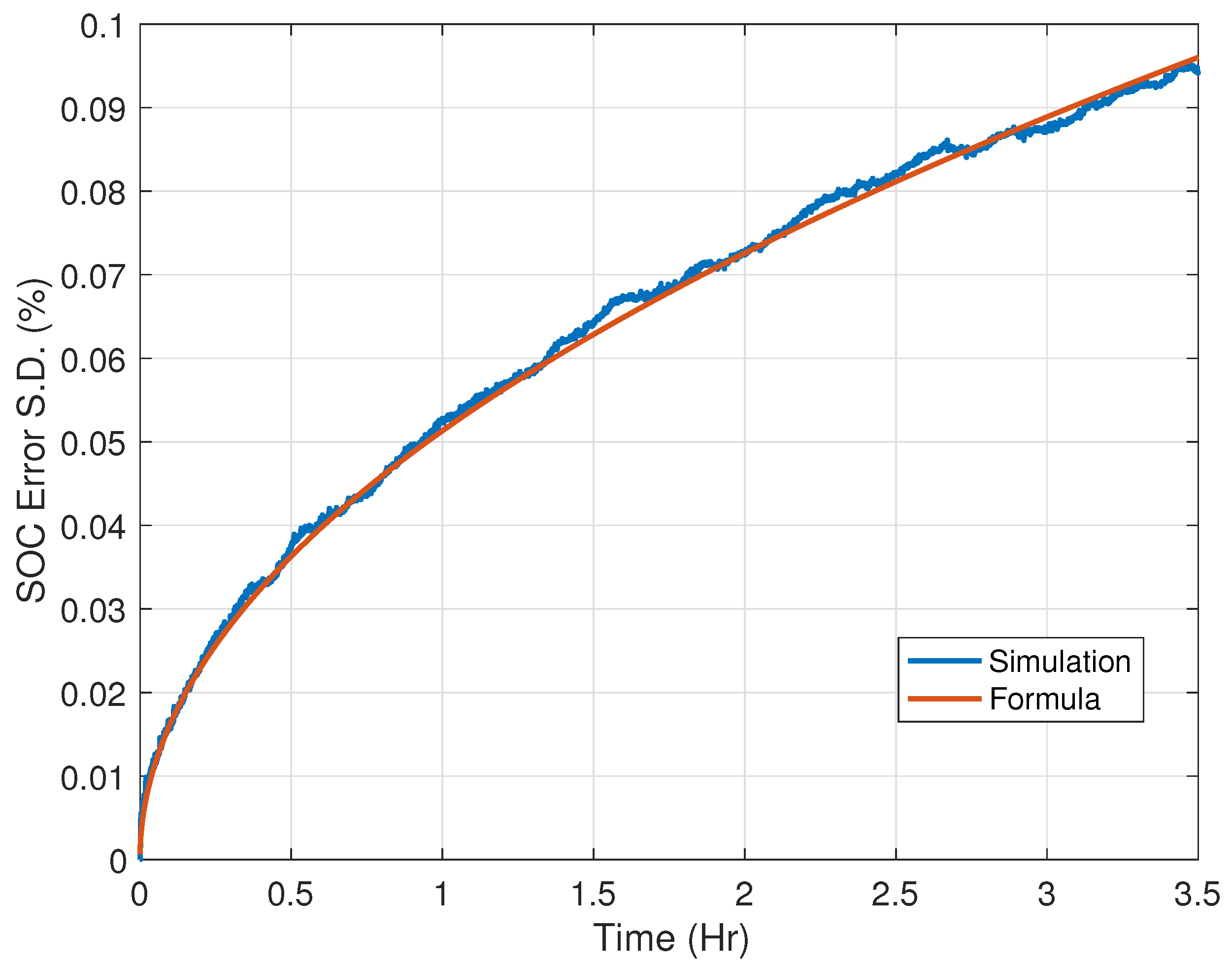
- Current measurement error: At time instant n, the computed SOC can be stated as if the current measurement error is zero-mean with standard deviation .where is the initial SOC and is the accumulated SOC from the start at . The SOC error is shown to be zero mean with standard deviation (see (25))It should be noted that, due to the current measurement noise, the variance of the Coulomb counting error is accumulative with time. As the time increases, i.e., , the standard deviation of SOC error also increases.
- Current integration error: With the consideration that approximation is done for the integration of current using the rectangular method, it can be shown that resulting approximation error is zero mean with standard deviation . As a result, at time instant n the computed SOC can be written as follows:where it can be shown that SOC error has zero mean and standard deviation as follows:Again, it must be noted that, due to the current measurement noise, the variance of the Coulomb counting error is accumulative with time.
- Uncertainty in the knowledge of battery capacity: With the consideration that uncertainty in the battery capacity has zero mean with standard deviation , the SOC at time instant n can be derived as follows:where represents SOC error as follows:where is defined as the capacity uncertainty coefficient. It should be noted that error in capacity due to uncertainty is not accumulative with time; rather, it is proportional to the accumulated SOC
- Charging efficiency error: The charging and discharging efficiencies are denoted as and , respectively. The uncertainties in charging and discharging efficiencies are denoted as and , respectively. At time step n, the SOC error can be written as follows:whereSimilar to , does not accumulate with time; rather, it accumulates with the accumulated Coulombs.
- Timing oscillator error: In the timing oscillator, considering the error of (ratio of clocked time vs. true time), the SOC at time instant n can be shown as follows:where denotes the SOC error, which is the deterministic value as follows:Similar to the error due to capacity uncertainty, is not accumulative with time and it is proportional to the accumulated SOC. It can be shown that the realistic value of is a too-small number. For example, a timing oscillator which is leading or lagging by three minutes in a month has . Therefore, the weightage of the timing oscillator error in the SOC estimation is very minimal.
4.1. Mitigating Time-Accumulative Errors
- Over sampling. It can be noted that both and , in (80) and (81), respectively, are proportional to , where and n are related as follows:where T is the total time duration. Now, both and can be written as follows:Now, one must realize that the integration error coefficient reduces with oversampling, i.e., as decreases so does . However, the current measurement noise coefficient is unaffected by the sampling time. The conclusion is that both and reduce with higher sampling rate—however, reduces at a higher rate compared to with oversampling.
- Reinitialization. Time-accumulative errors increase with time. The growth of error can be reduced down by re-initializing the SOC.
4.2. Mitigating SOC-Proportional Errors
5. Combined Effect and the State-Space Model Derivation
6. Numerical Analysis
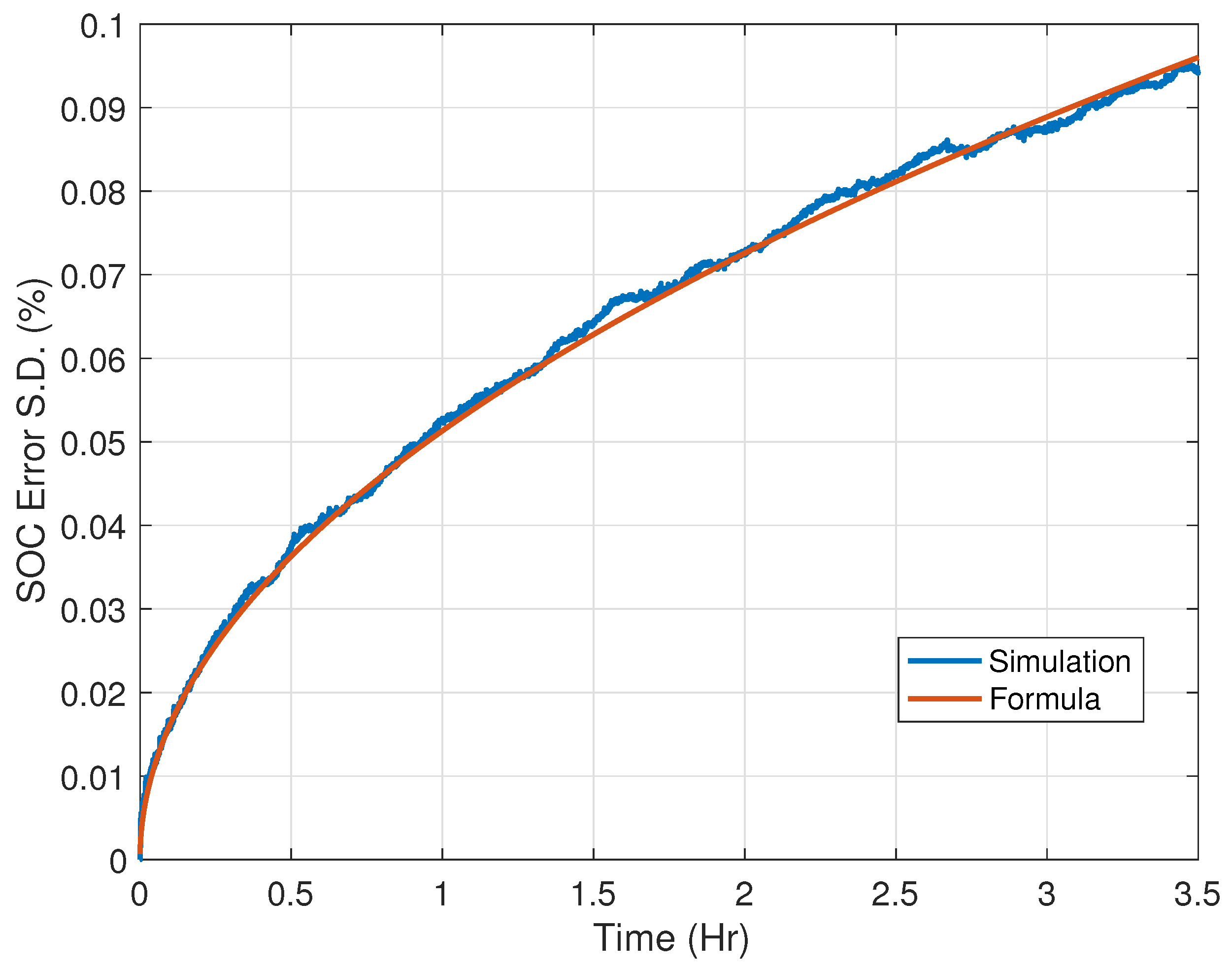
6.1. Effect of Current Measurement Error
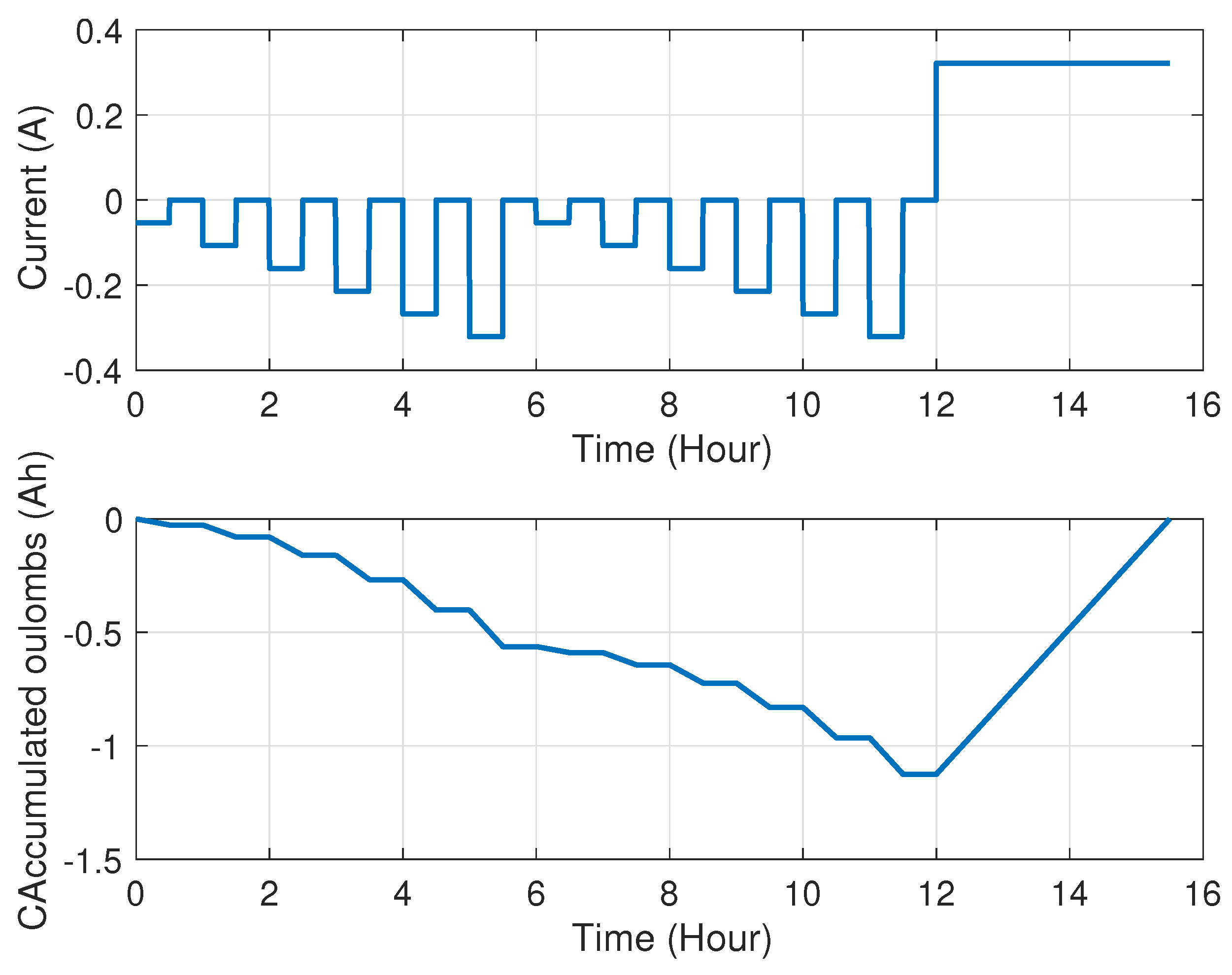
- Generate a perfectly integrable current profile, similar to the one shown in Figure 3. The generated current profile denotes in (10).
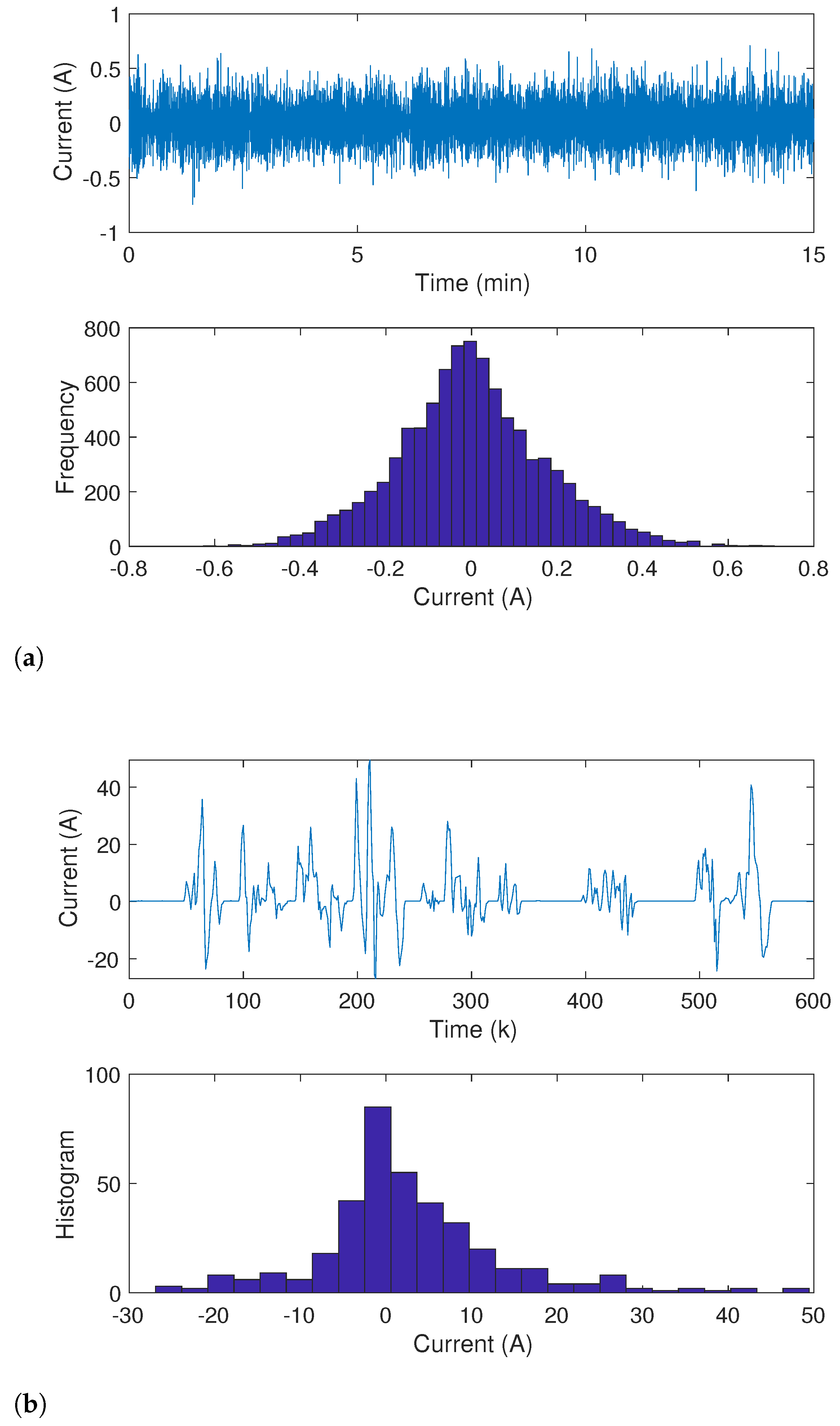
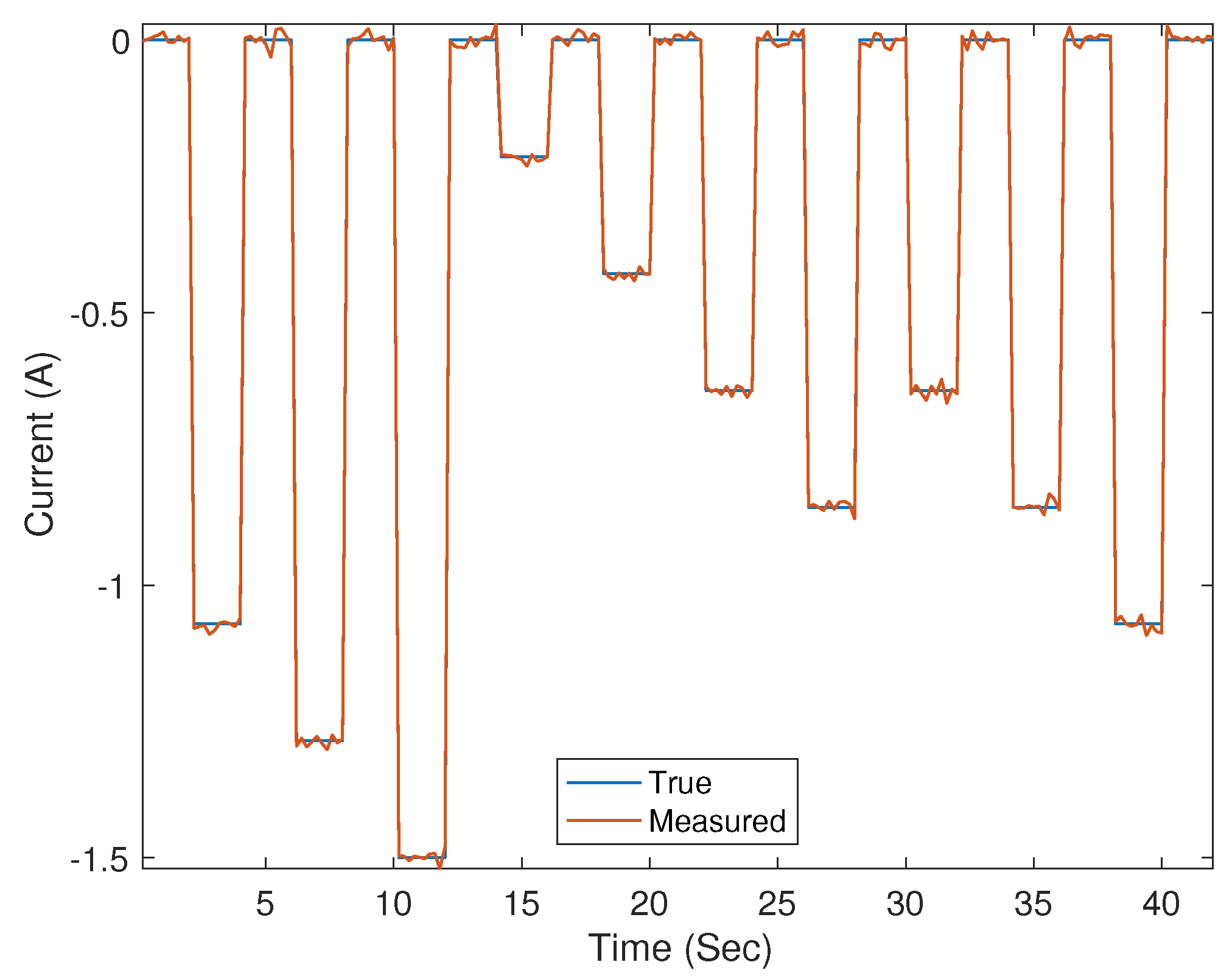
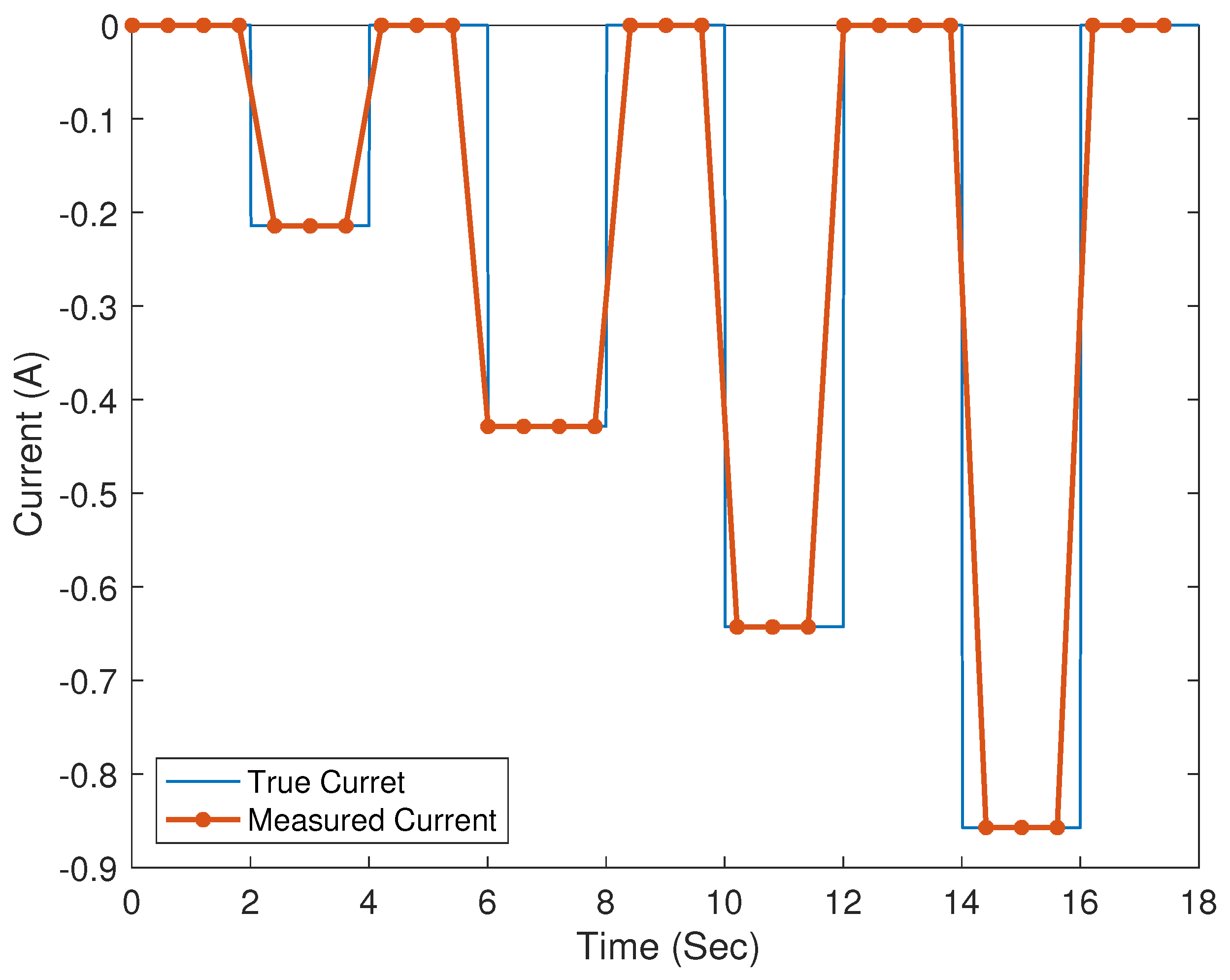
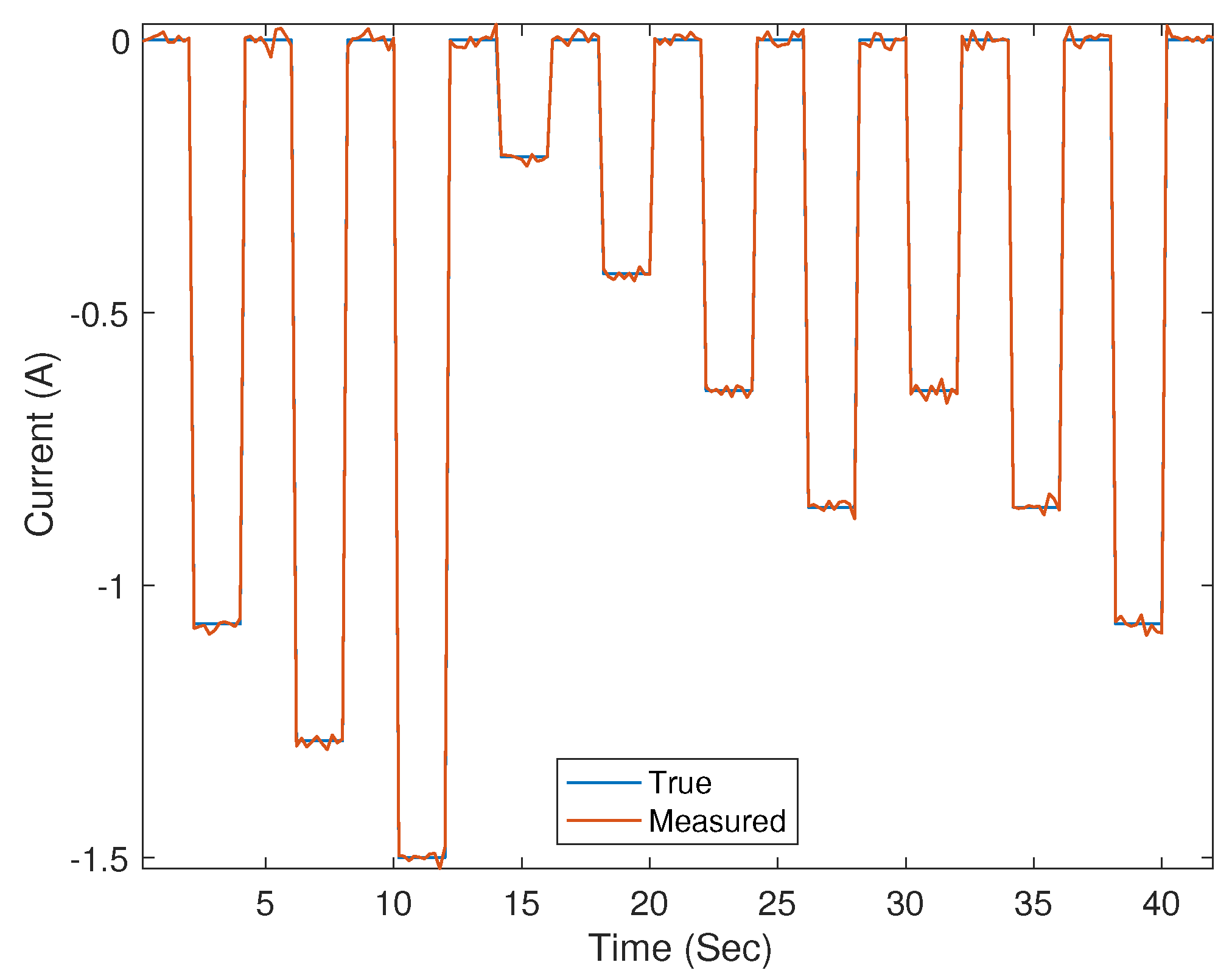
- First 40 s of the true current profile generated for the experiment is shown in Figure 4.
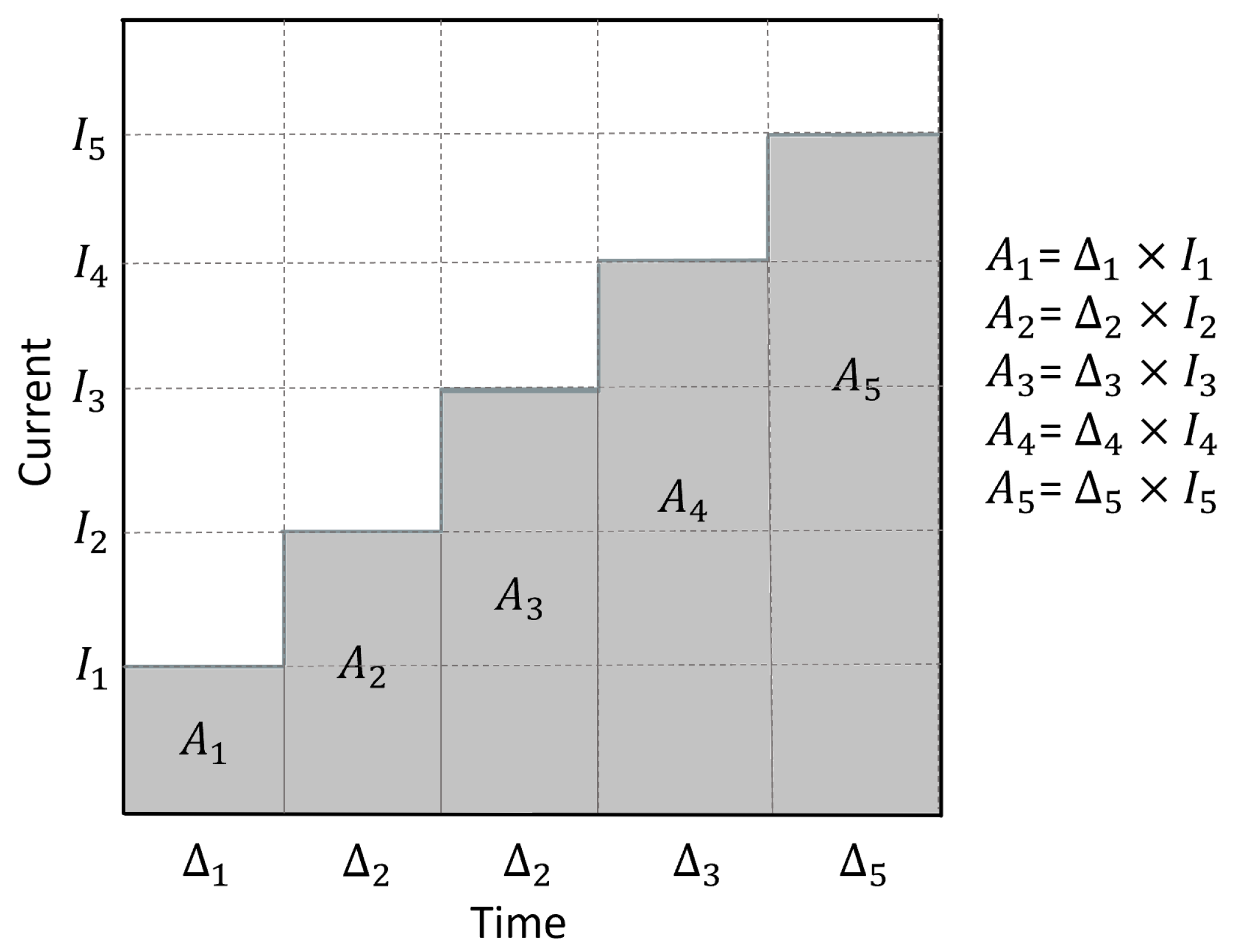
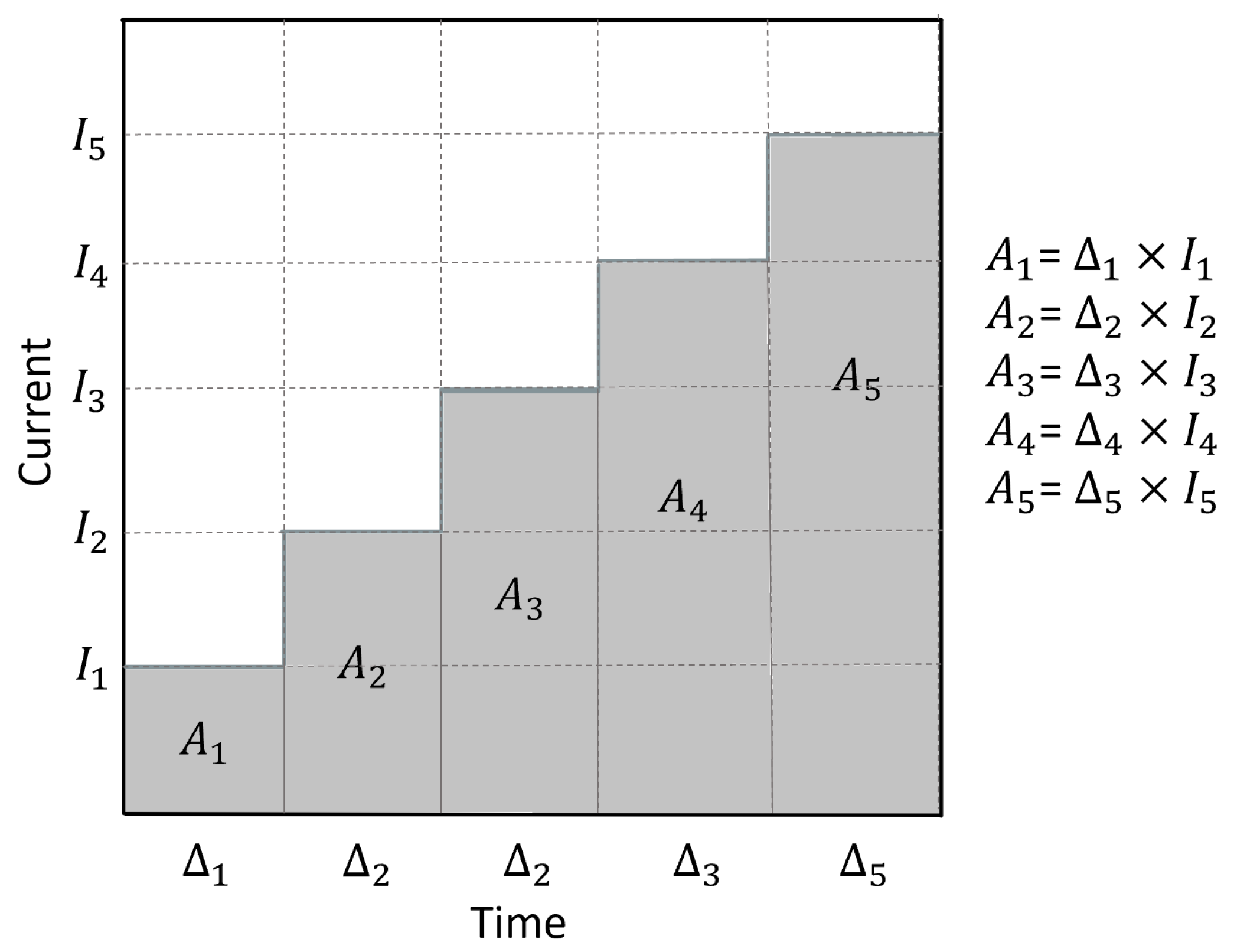
- Compute the true SOC at time k, , using the geometric approach, illustrated in Figure 3, for the entire duration of the profile, i.e., for where n denotes the number of samples in the entire current profile.
- Set where m denotes the index of the Monte Carlo run.
- Generate current measurement noise as zero-mean Gaussian noise with standard deviation Using this, generate the measured current profile .
- Figure 4 shows the true current profile along with the measured current profile for a duration of 40 s.
- Compute the (noisy) SOC, using the traditional Coulomb counting equation given in (65), i.e., the following:where the subscript m denotes the Monte Carlo run.
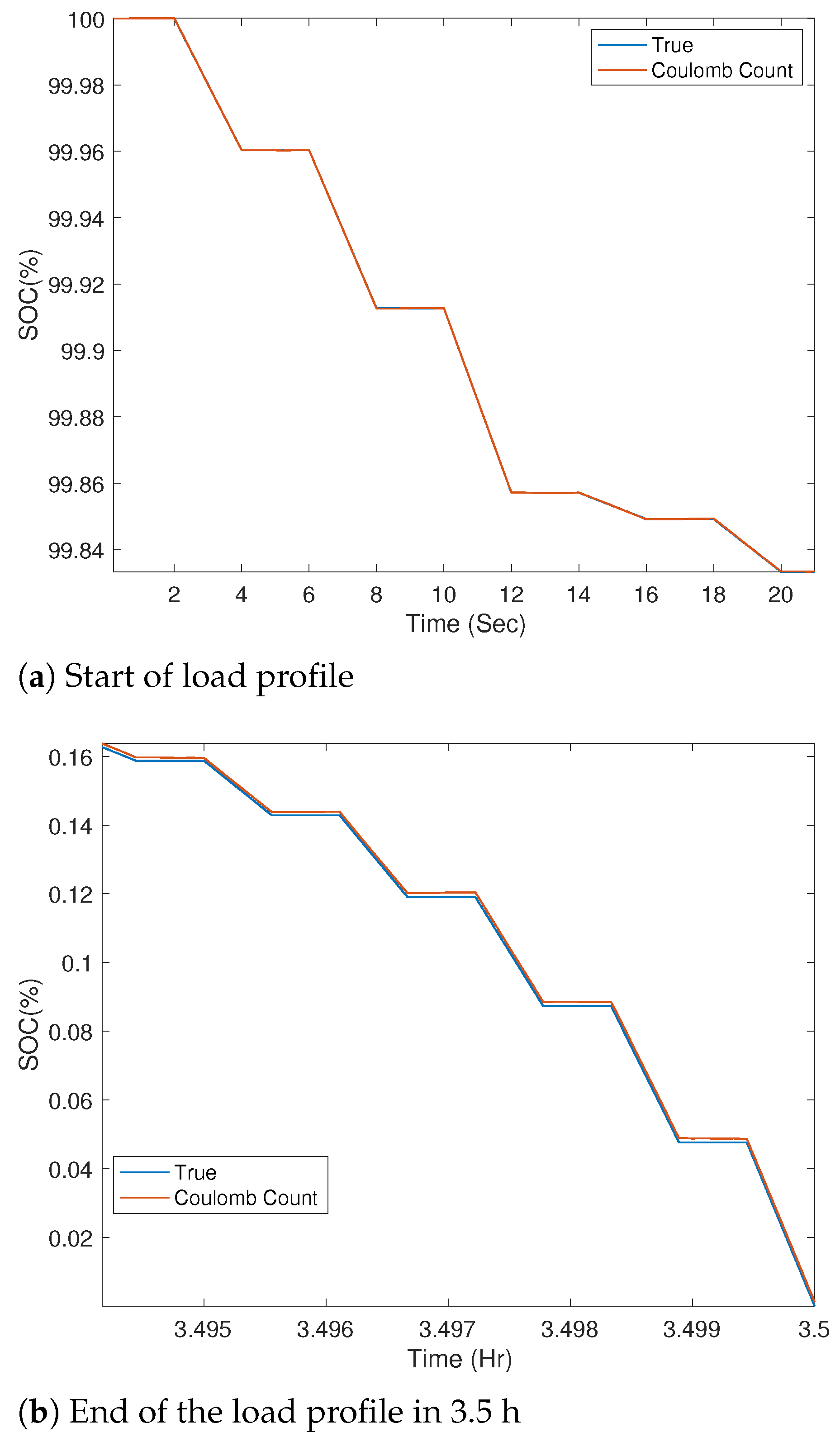
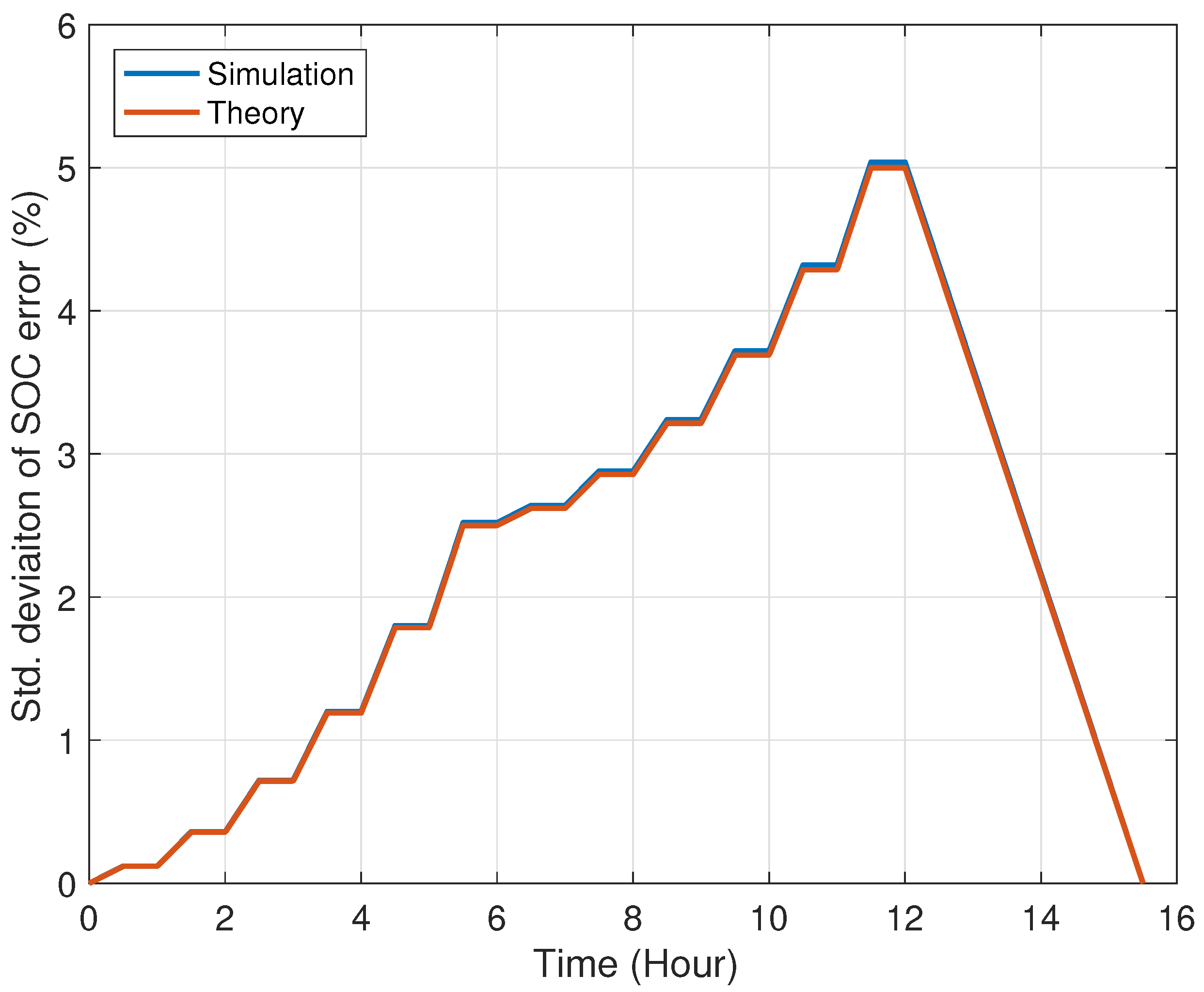
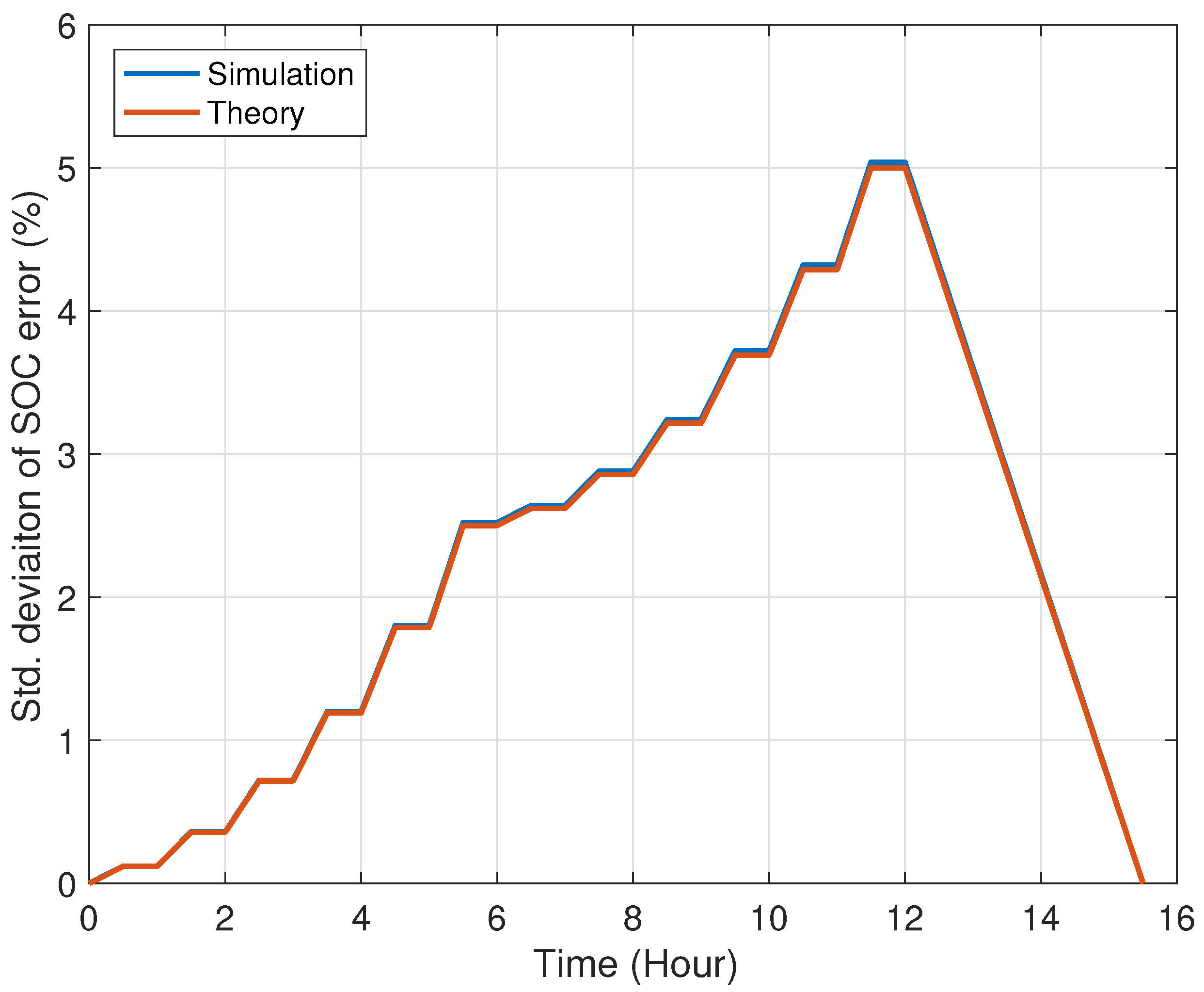
- Figure 5 shows the true SOC and the computed noisy SOC . The top plot (a) shows the SOC at the start of the current profile, and the bottom plot (b) shows the SOC toward the end of applying 3.5 h of the load profile.
- If , where M denotes the maximum number of Monte Carlo runs, go to step (g); otherwise, set and go to step (d).
- End of simulation (all the data generated during the above steps need to be stored for analysis).


6.2. Effect of Current Integration Error
- 1.
- Generate a perfectly integrable current, where the generated current allows one to perfectly compute shown in (30).
- –
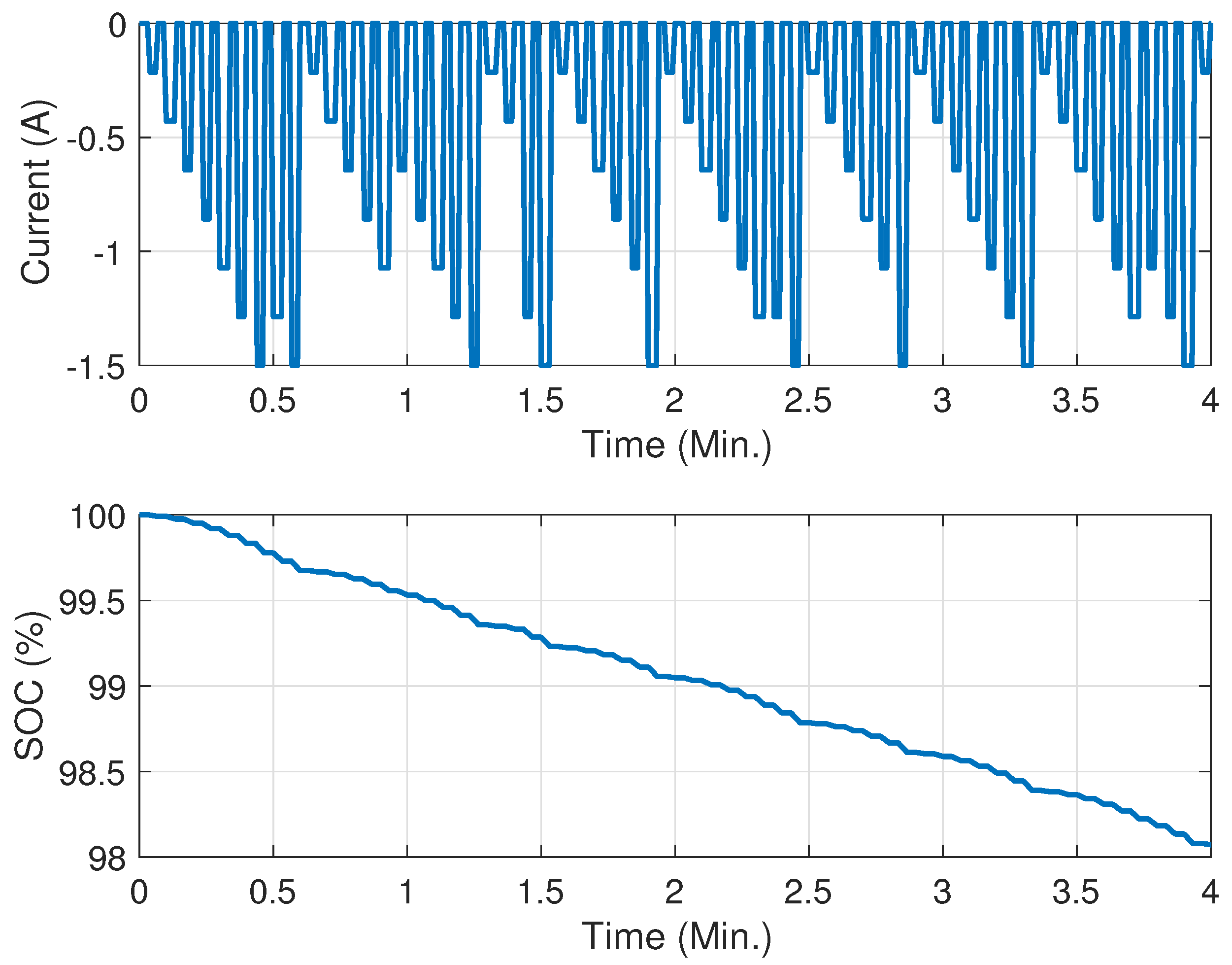
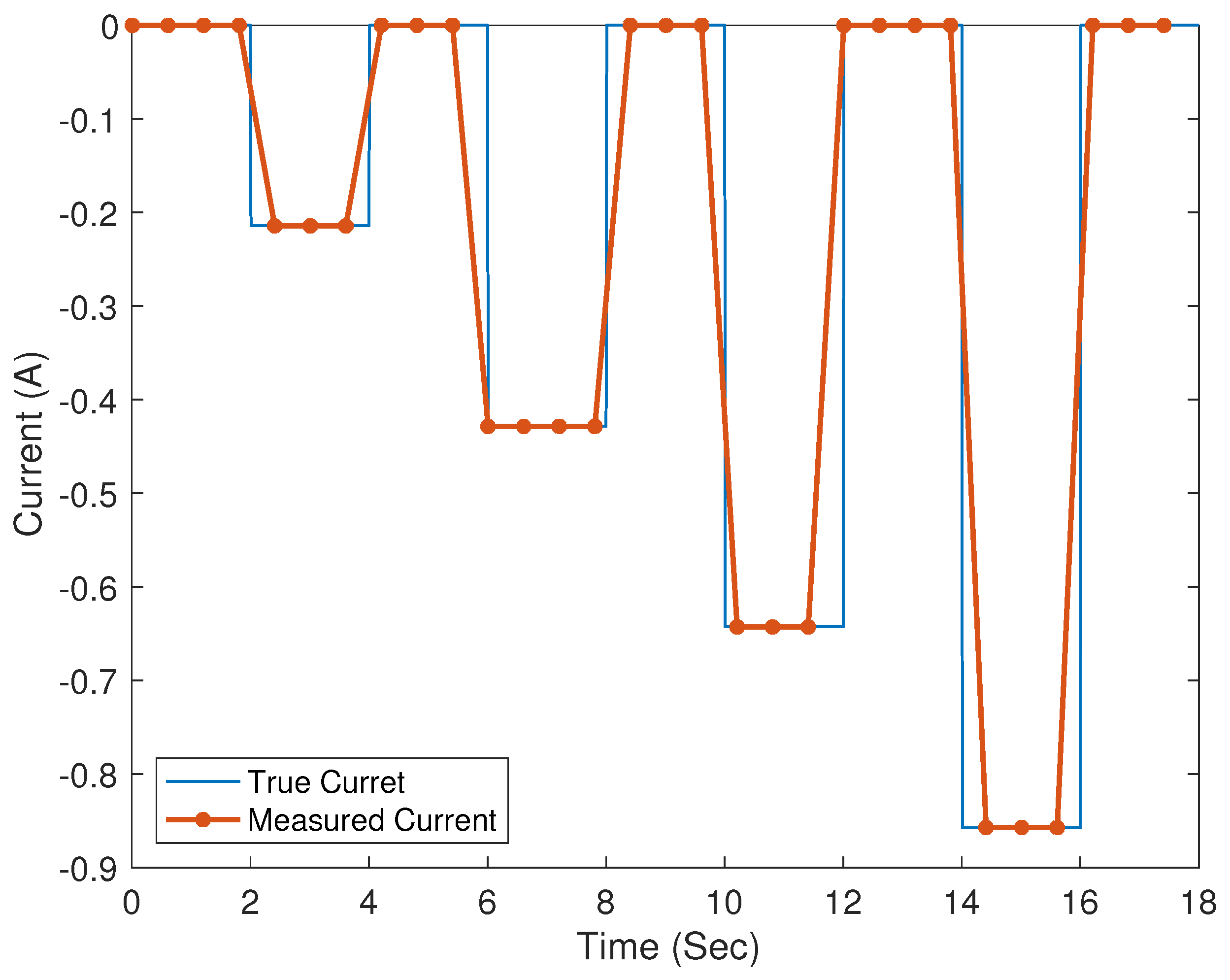
- First 18 s of the noiseless current profile is shown in red in Figure 7. Note that the true current profile is the downsampled version—this emulates the fact that the discretely measured current is always a downsampled version, and it will never be the same as the real current (shown in blue). First four minutes of the current profile along with the true SOC (assuming initial SOC =1) is shown in Figure 8.
- 2.
- Let the true battery capacity be .
- 3.
- Assuming the knowledge of the true capacity, compute the true SOC at time k, , using the geometric approach illustrated in Figure 3 for the entire duration of the profile, i.e., for where n denotes the number of samples in the entire current profile.
- –
- The second plot in Figure 8 shows the true SOC.
- 4.
- Set , where m denotes the index of the Monte Carlo run.
- 5.
- 6.
- If , where M denotes the maximum number of Monte Carlo runs, go to step (g); otherwise, set and go to step (e).
- 7.
- End of simulation (all the data generated during the above steps need to be stored for analysis).

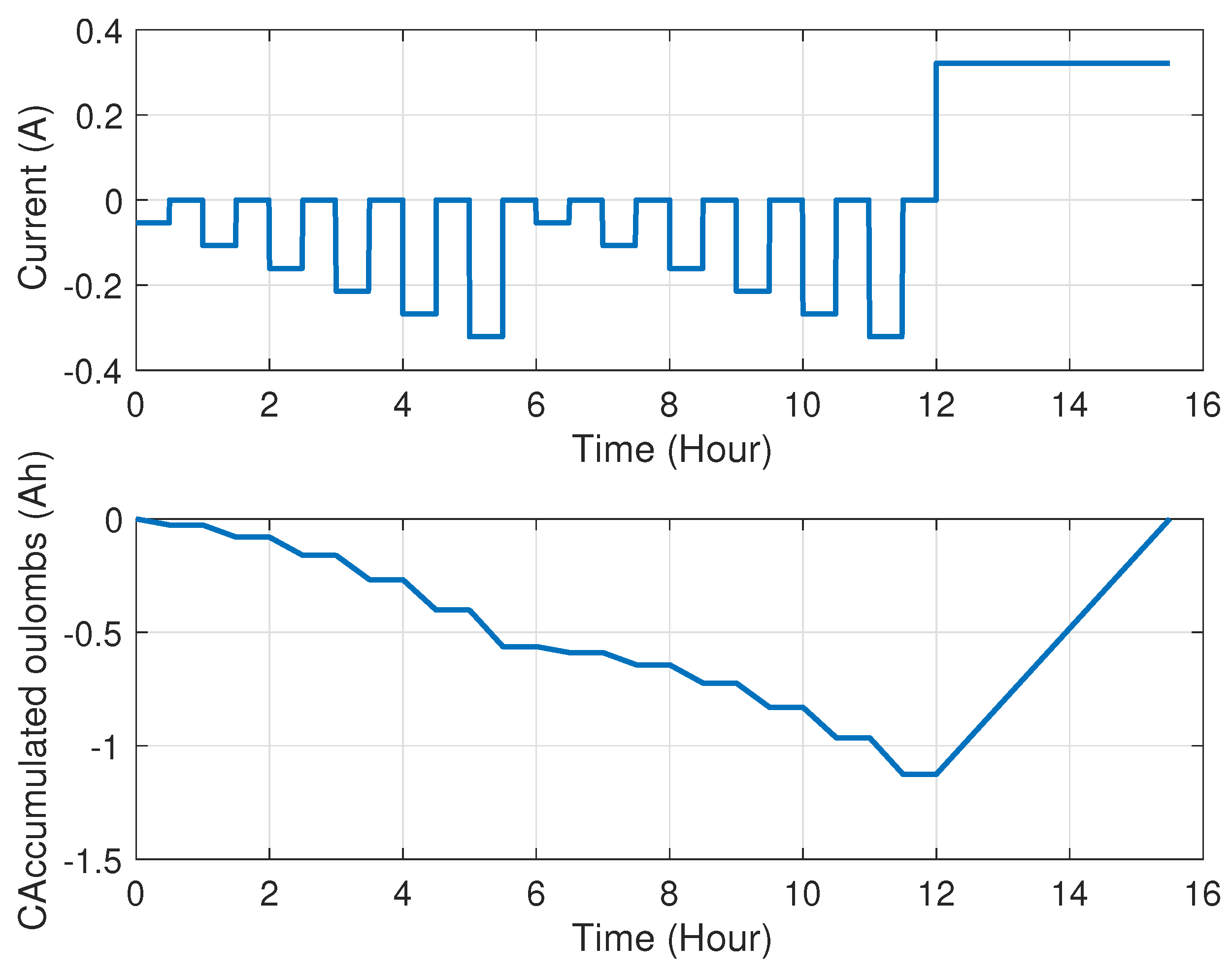
6.3. Effect of Battery Capacity Uncertainty
- 1.
- Generate a perfectly integrable current where the generated current profile denotes in (10).
- –
- The entire true current profile generated for the experiment is shown at the top plot Figure 10.
- 2.
- Let the true battery capacity be .
- 3.
- Assuming the knowledge of the true capacity, compute the true SOC at time k, , using the geometric approach illustrated Figure 3 for the entire duration of the profile, i.e., for where n denotes the number of samples in the entire current profile.
- –
- The second plot in Figure 10 shows the accumulated Coulombs . From this, the true SOC can be computed as
- 4.
- Set , where m denotes the index of the Monte Carlo run.
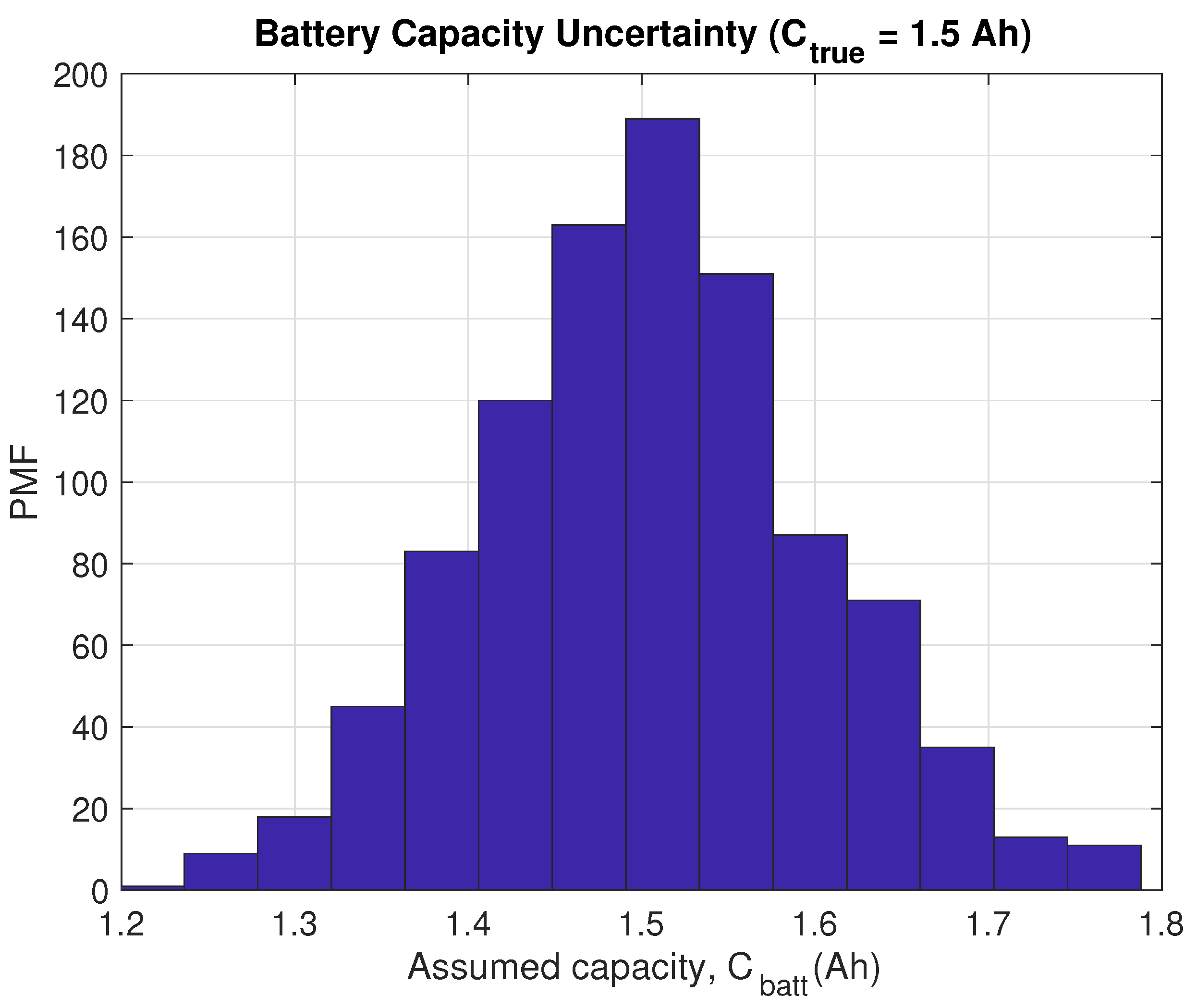
- 5.
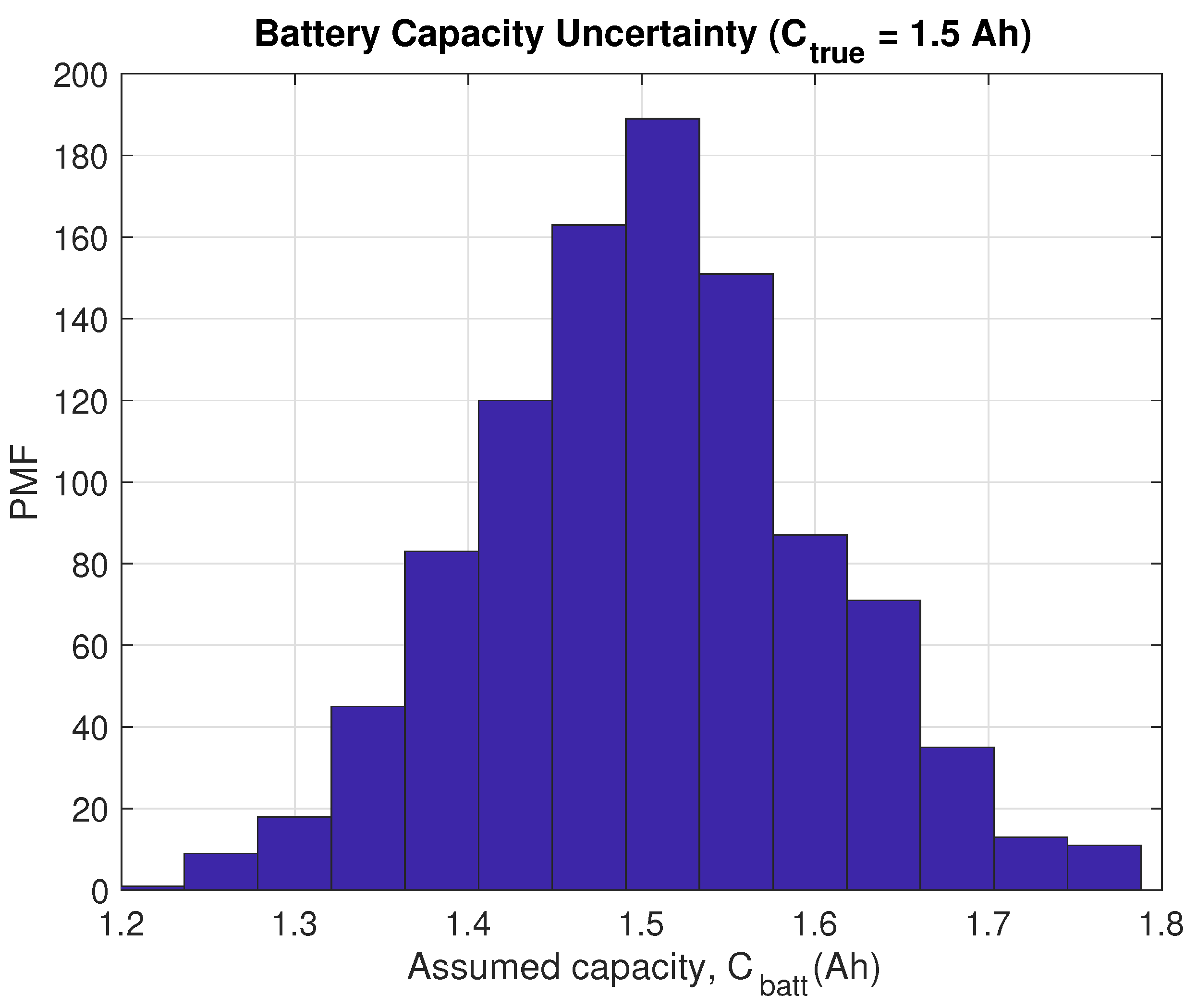
- Assuming a capacity estimation error s.d. of , use the capacity uncertainty model of (48) to compute the estimated battery capacity where it is a zero mean random number with standard deviation
- –
- Figure 11 shows all the values generated for in the form of a histogram.
- 6.
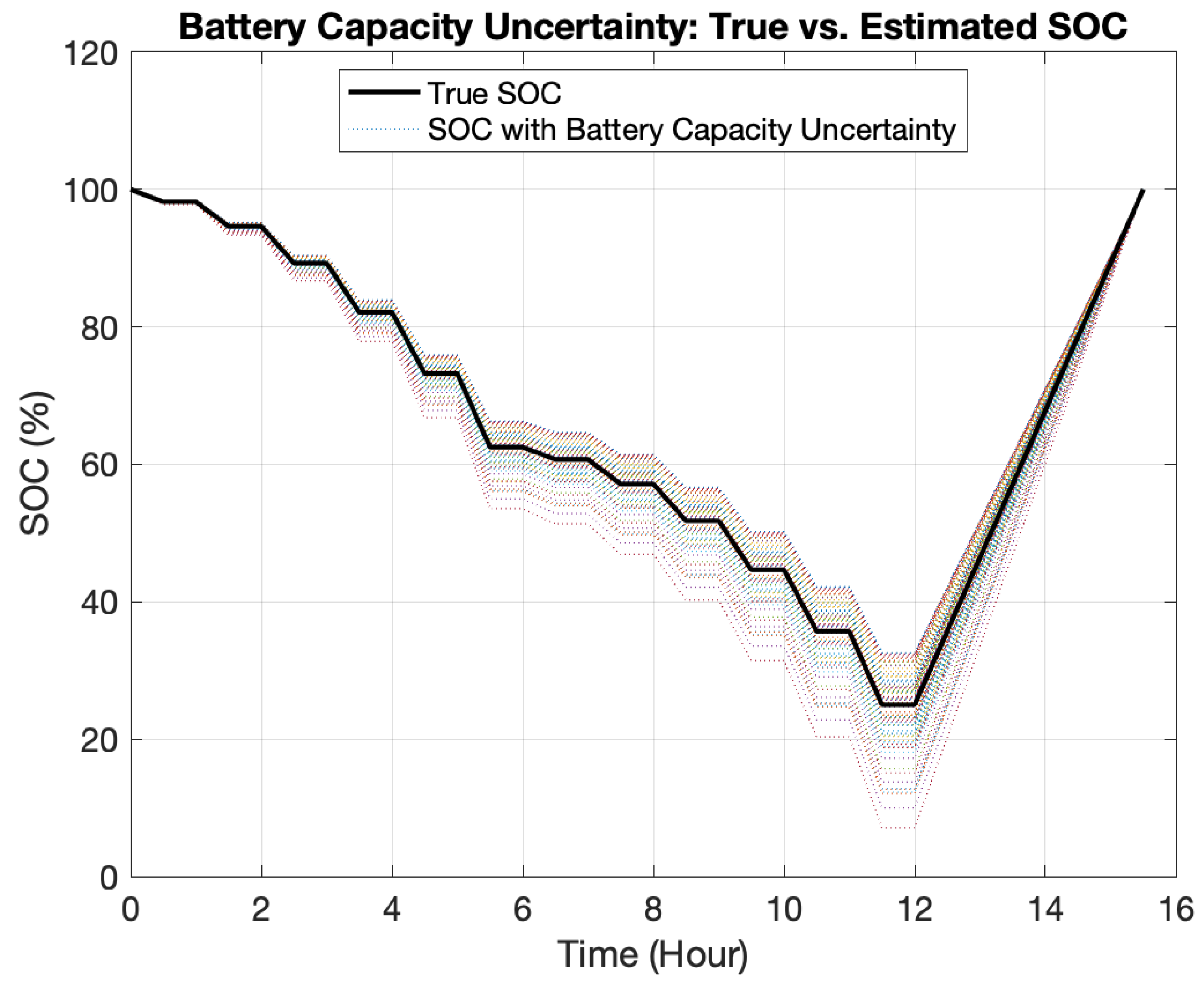
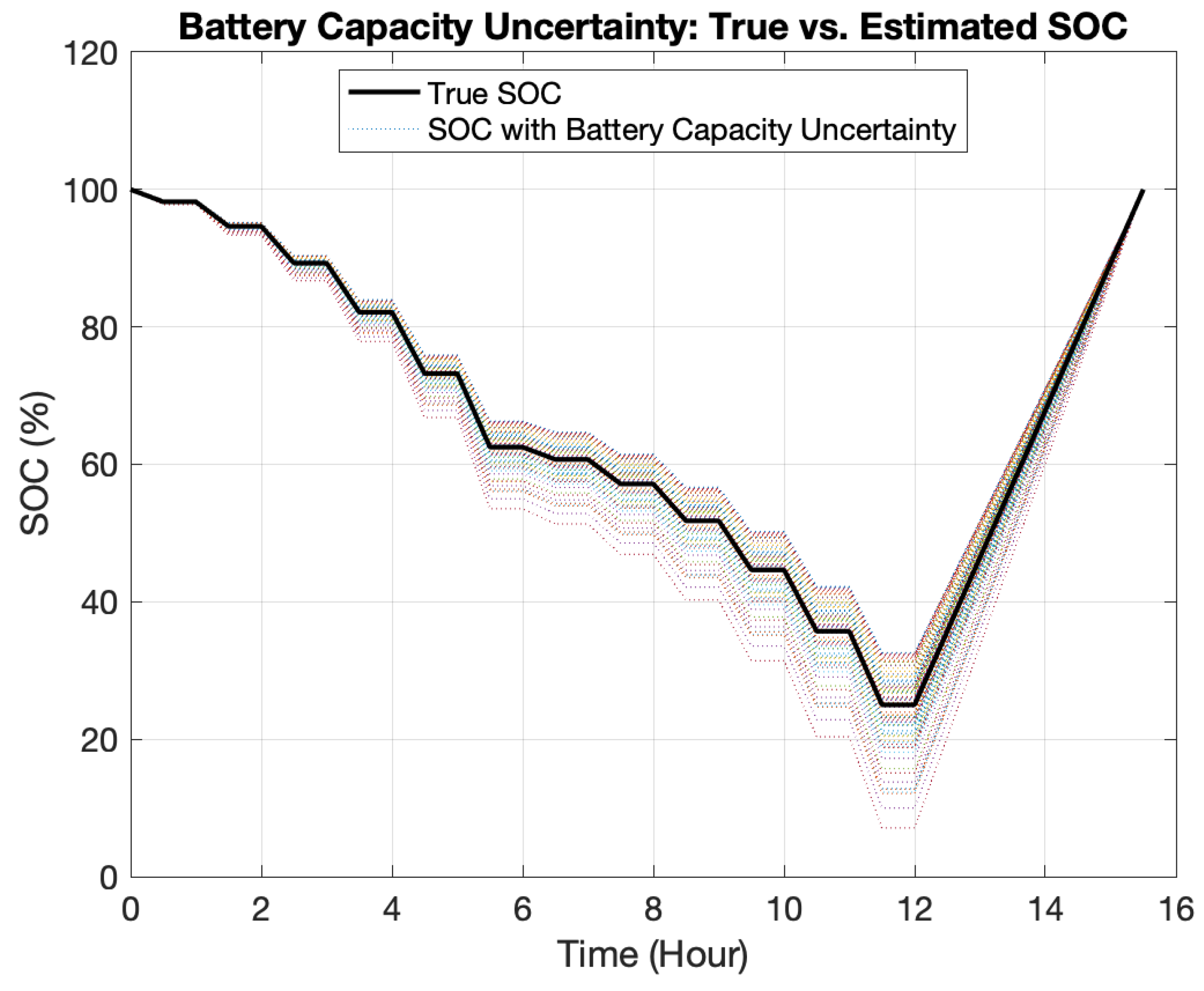
- Compute the (noisy) SOC , using the traditional Coulomb counting equation given in (65), i.e., the following:where the subscript m denotes the Monte-Carlo run.
- –
- Figure 12 shows the true SOC and the computed noisy SOC for different Monte Carlo runs.
- 7.
- If , where M denotes the maximum number of Monte Carlo runs, go to step (h); otherwise, set and go to step (e).
- 8.
- End of simulation (all the data generated during the above steps need to be stored for analysis).
7. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CRLB | Cramer–Rao lower bound |
| ECM | Equivalent circuit model |
| EKF | Extended Kalman filter |
| OCV | Open circuit voltage |
| PCRLB | Posterior Cramer–Rao lower bound |
| RLS | Recursive least squares |
| SOC | State of charge |
List of Notations
| True battery capacity (see (48)) | |
| Assumed battery capacity (5) | |
| Battery capacity uncertainty (48) | |
| Current integration error at time k (30) | |
| Sampling duration at time k (8) | |
| Sampling time that is assumed constant (14) | |
| True sampling time (71) | |
| Timing oscillator error (71) | |
| Coulomb counting efficiency (5) | |
| Charging efficiency (6) | |
| Discharging efficiency (6) | |
| Current through battery at time t (5) | |
| Sampled current through battery at time instant k (7) | |
| Current measurement noise (10) | |
| Process noise (3) | |
| Measurement noise (4) | |
| Integration error constant (36) | |
| Current measurement noise coefficient (28) | |
| Current integration noise coefficient (45) | |
| Capacity uncertainty coefficient (60) | |
| Charging uncertainty coefficient (68) | |
| Discharging uncertainty coefficient (68) | |
| Timing error coefficient (72) | |
| SOC at time t (5) | |
| Initial SOC (5) | |
| SOC at discretized time instance k (7) | |
| Change in SOC over n samples (16) | |
| Std. deviation of current measurement error (11) | |
| Std. deviation of load current changes (33) | |
| Std. deviation of battery capacity uncertainty (49) | |
| Std. deviation of charging uncertainty (70) | |
| Std. deviation of discharging uncertainty (70) | |
| Std. deviation of timing uncertainty (90) | |
| Std. deviation of (25) | |
| Std. deviation of (43) | |
| Std. deviation of (59) | |
| Std. deviation of (70) | |
| Std. deviation of (79) | |
| Std. deviation of (90) | |
| SOC error due to current measurement error (16) | |
| SOC error due to current integration error (39) | |
| SOC error due to battery capacity uncertainty(54) | |
| SOC error due to the uncertainty in c/d efficiency (66) | |
| SOC error due to timing oscillator uncertainty (75) | |
| SOC error due combined uncertainties (87) | |
| Measured current at time k (10) | |
| Measured voltage at time k (91) |
References
- Balasingam, B.; Pattipati, K. Elements of a Robust Battery-Management System: From Fast Characterization to Universality and More. IEEE Electrif. Mag. 2018, 6, 34–37. [Google Scholar] [CrossRef]
- Waag, W.; Fleischer, C.; Sauer, D.U. On-line estimation of lithium-ion battery impedance parameters using a novel varied-parameters approach. J. Power Sources 2013, 237, 260–269. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Yuan, S.; Wu, H.; Yin, C. State of charge estimation using the extended Kalman filter for battery management systems based on the ARX battery model. Energies 2013, 6, 444–470. [Google Scholar] [CrossRef]
- Balasingam, B.; Ahmed, M.; Pattipati, K. Battery Management Systems—Challenges and Some Solutions. Energies 2020, 13, 2825. [Google Scholar] [CrossRef]
- Pattipati, B.; Balasingam, B.; Avvari, G.; Pattipati, K.R.; Bar-Shalom, Y. Open circuit voltage characterization of lithium-ion batteries. J. Power Sources 2014, 269, 317–333. [Google Scholar] [CrossRef]
- Balasingam, B.; Avvari, G.; Pattipati, B.; Pattipati, K.; Bar-Shalom, Y. A robust approach to battery fuel gauging, part I: Real time model identification. J. Power Sources 2014, 272, 1142–1153. [Google Scholar] [CrossRef]
- Plett, G.L. Battery Management Systems, Volume I: Battery Modeling; Artech House Publishers: Boston, MA, USA, 2015. [Google Scholar]
- Plett, G.L. Battery Management Systems, Volume II: Equivalent-Circuit Methods; Artech House Publishers: Boston, MA, USA, 2015. [Google Scholar]
- Hariharan, K.S.; Tagade, P.; Ramachandran, S. Mathematical Modeling of Lithium Batteries: From Electrochemical Models to State Estimator Algorithms; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Ahmed, M.S.; Raihan, S.A.; Balasingam, B. A scaling approach for improved state of charge representation in rechargeable batteries. Appl. Energy 2020, 267, 114880. [Google Scholar] [CrossRef]
- Nikdel, M.; Nikdel, M. Various battery models for various simulation studies and applications. Renew. Sustain. Energy Rev. 2014, 32, 477–485. [Google Scholar]
- Balasingam, B.; Avvari, G.; Pattipati, B.; Pattipati, K.; Bar-Shalom, Y. A robust approach to battery fuel gauging, part II: Real time capacity estimation. J. Power Sources 2014, 269, 949–961. [Google Scholar] [CrossRef]
- Balasingam, B.; Avvari, G.; Pattipati, K.; Bar-Shalom, Y. Performance analysis results of a battery fuel gauge algorithm at multiple temperatures. J. Power Sources 2015, 273, 742–753. [Google Scholar] [CrossRef]
- Avvari, G.; Pattipati, B.; Balasingam, B.; Pattipati, K.; Bar-Shalom, Y. Experimental set-up and procedures to test and validate battery fuel gauge algorithms. Appl. Energy 2015, 160, 404–418. [Google Scholar] [CrossRef] [Green Version]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software; John Wiley & Sons: New York, NY, USA, 2004. [Google Scholar]
- Balasingam, B.; Pattipati, K. On the Identification of Electrical Equivalent Circuit Models Based on Noisy Measurements. IEEE Trans. Instrum. Meas. 2021, 70, 1–16. [Google Scholar] [CrossRef]
- Lee, S.; Mohtat, P.; Siegel, J.B.; Stefanopoulou, A.G.; Lee, J.W.; Lee, T.K. Estimation Error Bound of Battery Electrode Parameters With Limited Data Window. IEEE Trans. Ind. Inform. 2019, 16, 3376–3386. [Google Scholar] [CrossRef]
- Lin, X. Theoretical analysis of battery soc estimation errors under sensor bias and variance. IEEE Trans. Ind. Electron. 2018, 65, 7138–7148. [Google Scholar] [CrossRef]
- Bizeray, A.M.; Kim, J.H.; Duncan, S.R.; Howey, D.A. Identifiability and parameter estimation of the single particle lithium-ion battery model. IEEE Trans. Control. Syst. Technol. 2018, 27, 1862–1877. [Google Scholar] [CrossRef] [Green Version]
- Wei, Z.G.; Hu, J.; He, H.; Li, Y.; Xiong, B. Load Current and State of Charge Co-Estimation for Current Sensor-Free Lithium-ion Battery. IEEE Trans. Power Electron. 2021. [Google Scholar] [CrossRef]
- Hu, J.; He, H.; Wei, Z.; Li, Y. Disturbance-immune and aging-robust internal short circuit diagnostic for lithium-ion battery. IEEE Trans. Ind. Electron. 2021. [Google Scholar] [CrossRef]
- Wei, Z.; Zhao, J.; Ji, D.; Tseng, K.J. A multi-timescale estimator for battery state of charge and capacity dual estimation based on an online identified model. Appl. Energy 2017, 204, 1264–1274. [Google Scholar] [CrossRef]
- Song, Z.; Hou, J.; Hofmann, H.F.; Lin, X.; Sun, J. Parameter Identification and Maximum Power Estimation of Battery/Supercapacitor Hybrid Energy Storage System Based on Cramer–Rao Bound Analysis. IEEE Trans. Power Electron. 2018, 34, 4831–4843. [Google Scholar] [CrossRef]
- Song, Z.; Wang, H.; Hou, J.; Hofmann, H.; Sun, J. Combined State and Parameter Estimation of Lithium-Ion Battery with Active Current Injection. IEEE Trans. Power Electron. 2019, 35, 4439–4447. [Google Scholar] [CrossRef]
- Song, Z.; Hofmann, H.; Lin, X.; Han, X.; Hou, J. Parameter identification of lithium-ion battery pack for different applications based on Cramer-Rao bound analysis and experimental study. Appl. Energy 2018, 231, 1307–1318. [Google Scholar] [CrossRef]
- Klintberg, A.; Wik, T.; Fridholm, B. Theoretical bounds on the accuracy of state and parameter estimation for batteries. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 4035–4041. [Google Scholar]
- Lin, X. Analytic analysis of the data-dependent estimation accuracy of battery equivalent circuit dynamics. IEEE Control. Syst. Lett. 2017, 1, 304–309. [Google Scholar] [CrossRef]
- Zhang, L.; Lyu, C.; Hinds, G.; Wang, L.; Luo, W.; Zheng, J.; Ma, K. Parameter sensitivity analysis of cylindrical LiFePO4 battery performance using multi-physics modeling. J. Electrochem. Soc. 2014, 161, A762–A776. [Google Scholar] [CrossRef]
- Mendoza, S.; Liu, J.; Mishra, P.; Fathy, H. On the relative contributions of bias and noise to lithium-ion battery state of charge estimation errors. J. Energy Storage 2017, 11, 86–92. [Google Scholar] [CrossRef]
- Zhang, Y.; Song, W.; Lin, S.; Feng, Z. A novel model of the initial state of charge estimation for LiFePO4 batteries. J. Power Sources 2014, 248, 1028–1033. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, J.; Weng, H.; Hou, J.; Gao, T. Research on Online Correction of SOC estimation for Power Battery Based on Neural Network. In Proceedings of the Advanced Information Technology, Electronic and Automation Control Conference, Chongqing, China, 12–14 October 2018; pp. 2128–2132. [Google Scholar]
- Yan, J.; Xu, G.; Qian, H.; Xu, Y. Robust State of Charge Estimation for Hybrid Electric Vehicles: Framework and Algorithms. Energies 2010, 3, 1654–1672. [Google Scholar] [CrossRef]
- Xiong, R.; Yu, Q.; Lin, C. A novel method to obtain the open circuit voltage for the state of charge of lithium ion batteries in electric vehicles by using H infinity filter. Appl. Energy 2017, 207, 346–353. [Google Scholar] [CrossRef]
- Dong, G.; Wei, J.; Zhang, C.; Chen, Z. Online state of charge estimation and open circuit voltage hysteresis modeling of LiFePO4 battery using invariant imbedding method. Appl. Energy 2016, 162, 163–171. [Google Scholar] [CrossRef]
- Cho, Y.; Jeong, Y.; Ahn, J.; Ryu, S.; Lee, B. A new SOC estimation algorithm without integrated error using DCIR repetitive calculation. In Proceedings of the International Conference on Electrical Machines and Systems, Hangzhou, China, 22–25 October 2014; pp. 865–870. [Google Scholar]
- Wu, T.H.; Moo, C.S. State-of-Charge Estimation with State-of-Health Calibration for Lithium-Ion Batteries. Energies 2017, 10, 987. [Google Scholar]
- Sepasi, S.; Ghorbani, R.; Liaw, B.Y. Inline state of health estimation of lithium-ion batteries using state of charge calculation. J. Power Sources 2015, 299, 246–254. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Plett, G.L. Sigma-point Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2. Simultaneous state and parameter estimation. J. Power Sources 2006, 161, 1369–1384. [Google Scholar] [CrossRef]
- Linghu, J.; Kang, L.; Liu, M.; Hu, B.; Wang, Z. An Improved Model Equation Based on a Gaussian Function Trinomial for State of Charge Estimation of Lithium-ion Batteries. Energies 2019, 12, 1366. [Google Scholar] [CrossRef] [Green Version]
- Wei, Z.; Meng, S.; Xiong, B.; Ji, D.; Tseng, K.J. Enhanced online model identification and state of charge estimation for lithium-ion battery with a FBCRLS based observer. Appl. Energy 2016, 181, 332–341. [Google Scholar] [CrossRef]
- Wadi, A.; Abdel-Hafez, M.F.; Hussein, A.A. Mitigating the Effect of Noise Uncertainty on the Online State-of-Charge Estimation of Li-Ion Battery Cells. IEEE Trans. Veh. Technol. 2019, 68, 8593–8600. [Google Scholar] [CrossRef]
- Peng, S.; Chen, C.; Shi, H.; Yao, Z. State of charge estimation of battery energy storage systems based on adaptive unscented Kalman filter with a noise statistics estimator. IEEE Access 2017, 5, 13202–13212. [Google Scholar] [CrossRef]
- El Din, M.S.; Abdel-Hafez, M.F.; Hussein, A.A. Enhancement in Li-ion battery cell state-of-charge estimation under uncertain model statistics. IEEE Trans. Veh. Technol. 2015, 65, 4608–4618. [Google Scholar] [CrossRef]
- Sun, Q.; Zhang, H.; Zhang, J.; Ma, W. Adaptive unscented kalman filter with correntropy loss for robust state of charge estimation of lithium-ion battery. Energies 2018, 11, 3123. [Google Scholar] [CrossRef] [Green Version]
- Zhang, K.; Ma, J.; Zhao, X.; Zhang, D.; He, Y. State of Charge Estimation for Lithium Battery Based on Adaptively Weighting Cubature Particle Filter. IEEE Access 2019, 7, 166657–166666. [Google Scholar] [CrossRef]
- Xi, Z.; Dahmardeh, M.; Xia, B.; Fu, Y.; Mi, C. Learning of battery model bias for effective state of charge estimation of lithium-ion batteries. IEEE Trans. Veh. Technol. 2019, 68, 8613–8628. [Google Scholar] [CrossRef]
- Bi, Y.; Choe, S.Y. An adaptive sigma-point Kalman filter with state equality constraints for online state-of-charge estimation of a Li (NiMnCo) O2/Carbon battery using a reduced-order electrochemical model. Appl. Energy 2020, 258, 113925. [Google Scholar] [CrossRef]
- Movassagh, K.; Raihan, S.A.; Balasingam, B. Performance Analysis of Coulomb Counting Approach for State of Charge Estimation. In Proceedings of the IEEE Electrical Power and Energy Conference, Montreal, QC, Canada, 16–18 October 2019. [Google Scholar]
- Movassagh, K. Performance Analysis of Coulomb Counting Approach for State of Charge Estimation in Li-Ion Batteries. 2020. Available online: https://scholar.uwindsor.ca/etd/8384/ (accessed on 12 February 2021).
- Balasingam, B.; French, B.; Yaakov, B.S.; Pattipati, B.; Pattipati, K.; Meacham, J.; Williams, T.; Avvari, G.V.; Hwang, T.S. Battery State of Charge Tracking, Equivalent Circuit Selection and Benchmarking. U.S. Patent 10664562, 26 May 2020. [Google Scholar]
- Chapra, S.C.; Canale, R.P. Numerical Methods for Engineers; Mcgraw-Hill: New York, NY, USA, 1998; Volume 2. [Google Scholar]
- Barré, A.; Deguilhem, B.; Grolleau, S.; Gérard, M.; Suard, F.; Riu, D. A review on lithium-ion battery ageing mechanisms and estimations for automotive applications. J. Power Sources 2013, 241, 680–689. [Google Scholar] [CrossRef] [Green Version]
- Spotnitz, R. Simulation of capacity fade in lithium-ion batteries. J. Power Sources 2003, 113, 72–80. [Google Scholar] [CrossRef]


| 1 h | 24 h | 1 Year | |
|---|---|---|---|
| 0.0035 | 0.0172 | 0.3289 | |
| 0.0111 | 0.0544 | 1.0399 | |
| 0.0351 | 0.1721 | 3.2886 |
| 1 h | 24 h | 1 Year | |
|---|---|---|---|
| 0.0588 | 0.2879 | 5.5002 | |
| 0.1858 | 0.9104 | 17.3930 | |
| 0.5877 | 2.8789 | 55.0016 |
| 1 h | 24 h | 1 Year | |
|---|---|---|---|
| 0.0183 | 0.0899 | 1.7166 | |
| 0.0580 | 0.2841 | 5.4285 | |
| 0.1834 | 0.8985 | 17.1664 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Movassagh, K.; Raihan, A.; Balasingam, B.; Pattipati, K. A Critical Look at Coulomb Counting Approach for State of Charge Estimation in Batteries. Energies 2021, 14, 4074. https://doi.org/10.3390/en14144074
Movassagh K, Raihan A, Balasingam B, Pattipati K. A Critical Look at Coulomb Counting Approach for State of Charge Estimation in Batteries. Energies. 2021; 14(14):4074. https://doi.org/10.3390/en14144074
Chicago/Turabian StyleMovassagh, Kiarash, Arif Raihan, Balakumar Balasingam, and Krishna Pattipati. 2021. "A Critical Look at Coulomb Counting Approach for State of Charge Estimation in Batteries" Energies 14, no. 14: 4074. https://doi.org/10.3390/en14144074
APA StyleMovassagh, K., Raihan, A., Balasingam, B., & Pattipati, K. (2021). A Critical Look at Coulomb Counting Approach for State of Charge Estimation in Batteries. Energies, 14(14), 4074. https://doi.org/10.3390/en14144074