
Electrical Infrastructure Design Methodology of Dynamic and Static Charging for Heavy and Light Duty Electric Vehicles





Abstract
1. Introduction
- Static: LDVs and HDVs charge at static charging stations located along the highway.
- Inductive: LDVs and HDVs are supplied by dynamic inductive charging infrastructure along the route.
- Hybrid: LDVs charge at static charging stations, and HDVs are supplied by the dynamic catenary charging infrastructure.
2. Charging Technologies
- Plug-in chargers
- Most of the chargers are slow private chargers connected to the low-voltage network. A large part of the publicly accessible fast chargers presents power characteristics suitable for passenger vehicle charging, but chargers for HDVs are increasing sensibly in the last years, with power that ranges from 150 up to 400 kW. It follows that Direct Current Fast Charging (DCFC) stations with rated power designed for high-power electric trucks on highways can be directly connected to the medium-voltage grid [12].
- Inductive charging
- In an inductive charging system, energy is transferred wirelessly through the magnetic field: the scheme resembles the magnetic pairing of a transformer, where a transmitter coil beneath the asphalt of the road represents the primary side, and a receiver coil located beneath the vessel of the car represents the secondary side. Coils and switches below the surface of the road energize small road segments (1–50 m) when a vehicle is positioned above them. The scheme resembles the magnetic pairing of a transformer, where a transmitter coil beneath the asphalt of the road represents the primary side, and a receiver coil located beneath the vessel of the car represents the secondary side. Alternating Current (AC) electricity is usually supplied through power inverters at 400V AC. Inductive technology is assessed to be characterized by higher costs than other alternatives, but allows both LDVs and HDVs to charge without the installation of a pick-up element. AC electricity is supplied through inverters usually at 400V AC.
- Catenary charging
- The catenary charging scheme resembles the one of a DC railway power supply, although sizing the catenary system can result in being more complex than for trains: factors such as time schedule and distances between HDVs cannot be regulated as easily as for trains/metros. The complexity of the load demand from the aggregation of several trucks, with different conditions of slope, distance between each other, etc., will not be analyzed in depth since it is not in the scope of the article. Traction substations typically include transformers and uncontrolled 6 or 12 pulse diode-based rectifiers, or in some cases, an AC–DC bi-directional converter. Despite the fact that they do not generate imbalances, they can generate high harmonic pollution. Bi-directional converters can be installed as substitutes for or in parallel to rectifiers to take advantage of the energy regenerated during breaking or downhill segments and to inject electricity back into the grid [13].
3. Methodology
3.1. Preliminary Design Considerations
3.2. Vehicle Energy Consumption Models
3.2.1. Static Energy Model
- A vehicle needs to be recharged if its SoC goes below a minimum level of 20%: below this value, the driver will experience charging anxiety and will charge at the nearest charging station in its driving direction.
- Once the EV has reached its energy demand at the static charging station, a new energy demand will be selected from a random range. The minimum of this interval corresponds to the amount of energy necessary to complete the specific journey of the car. The maximum value is the energy necessary to reach 80% of the battery capacity, where the charging current decreases due to the chemical characteristics of common vehicle batteries [22].
- Plug-in charging stations are assumed to be characterized by a maximum capacity of 50 kW for LDVs and 400 kW for HDVs.
3.2.2. Dynamic Energy Model
3.3. Charging Infrastructure Scenarios
3.3.1. Static Scenario
- As a first step, it is necessary to assume a share of electric vehicles to be electrified: based on current policies, it is expected that in 2030, up to 25% of all road transport vehicles will be electric. In order to meet global climate goals, this percentage should increase up to 45% [12].
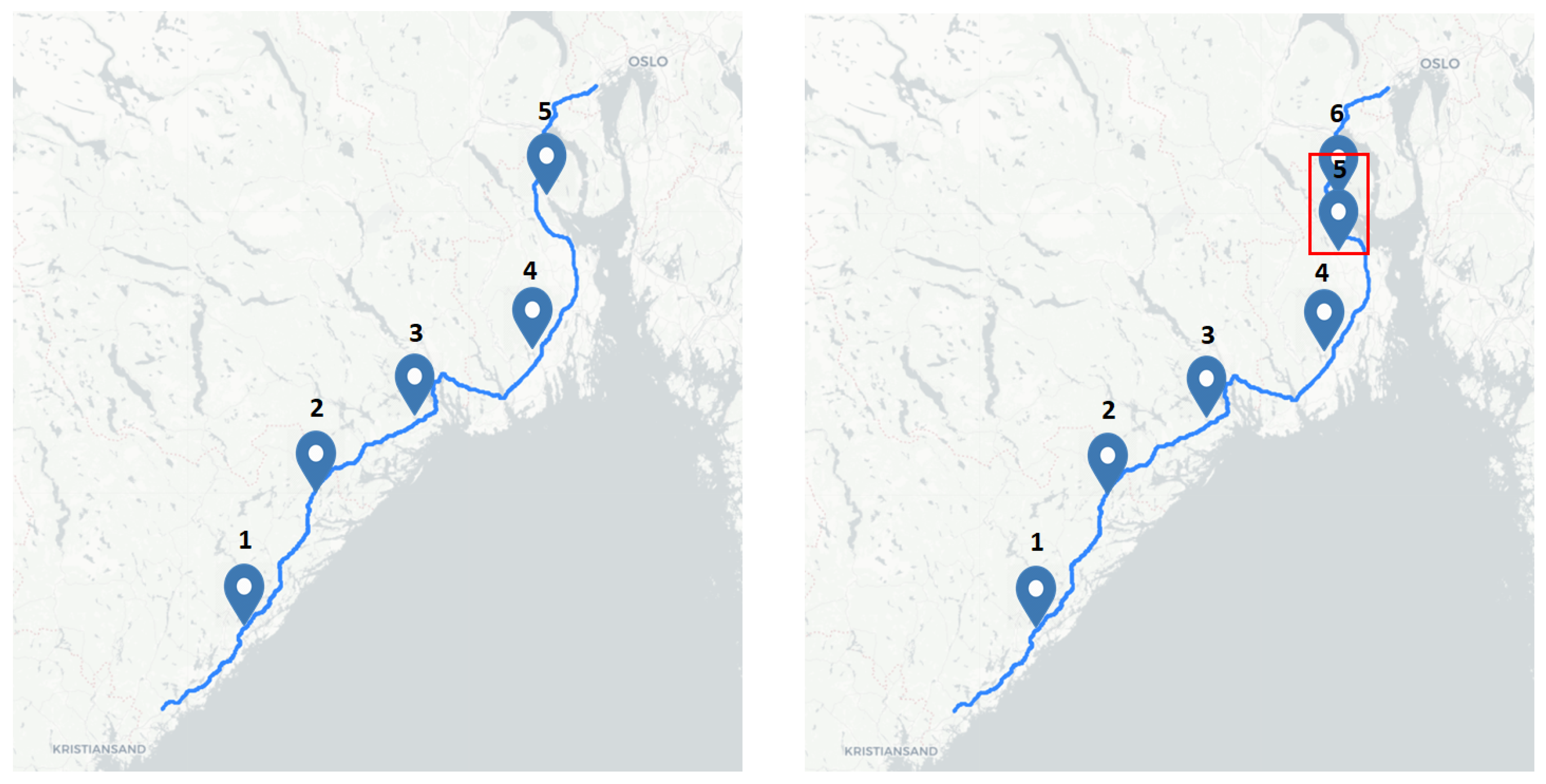
- The locations of the charging stations are defined based on heuristics: charging stations were located every 50 km in line with the recommendation of the European Joint Research Center. It is stated that for every highway direction, a maximum distance of 60 km would provide adequate infrastructure [23]. The first charging station is located on the stretch in order that its distance from the entry point of the road is below 50 km, and the following stations are located along the highway applying a space interval of 50 km.
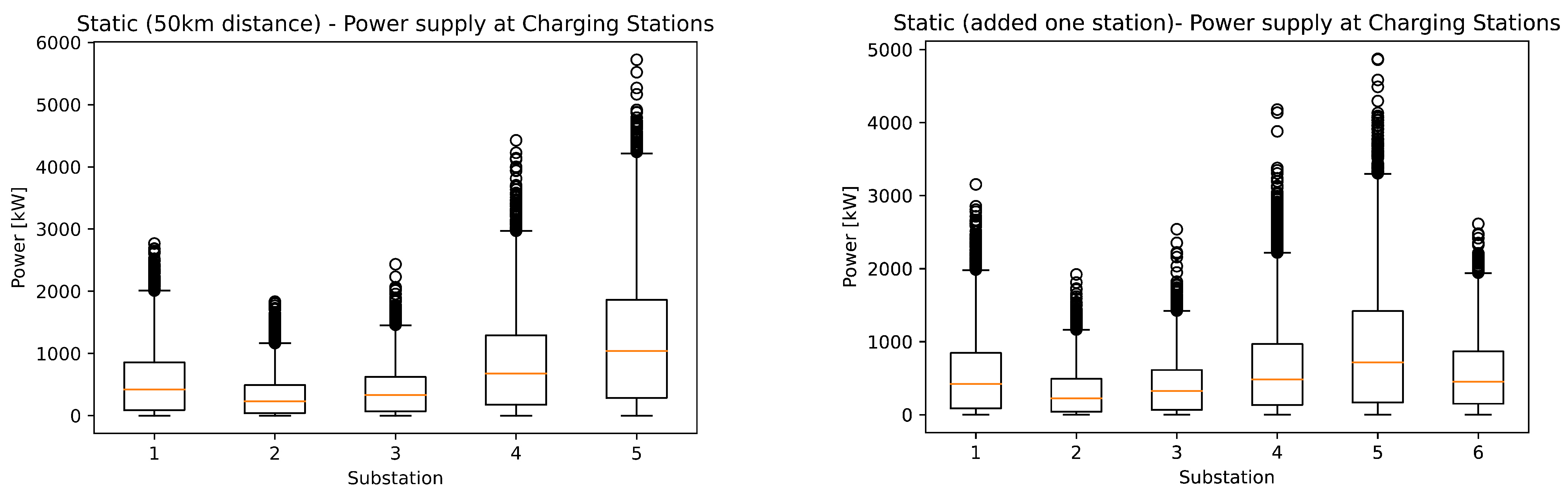
- A first load assessment is carried out to detect if the traffic demand is split between the stations in an even way. If the simulation output shows one or multiple stations that are loaded substantially more than the average station along the highway, because of the traffic conditions, then another charging station is added in order to flatten and distribute the demand.
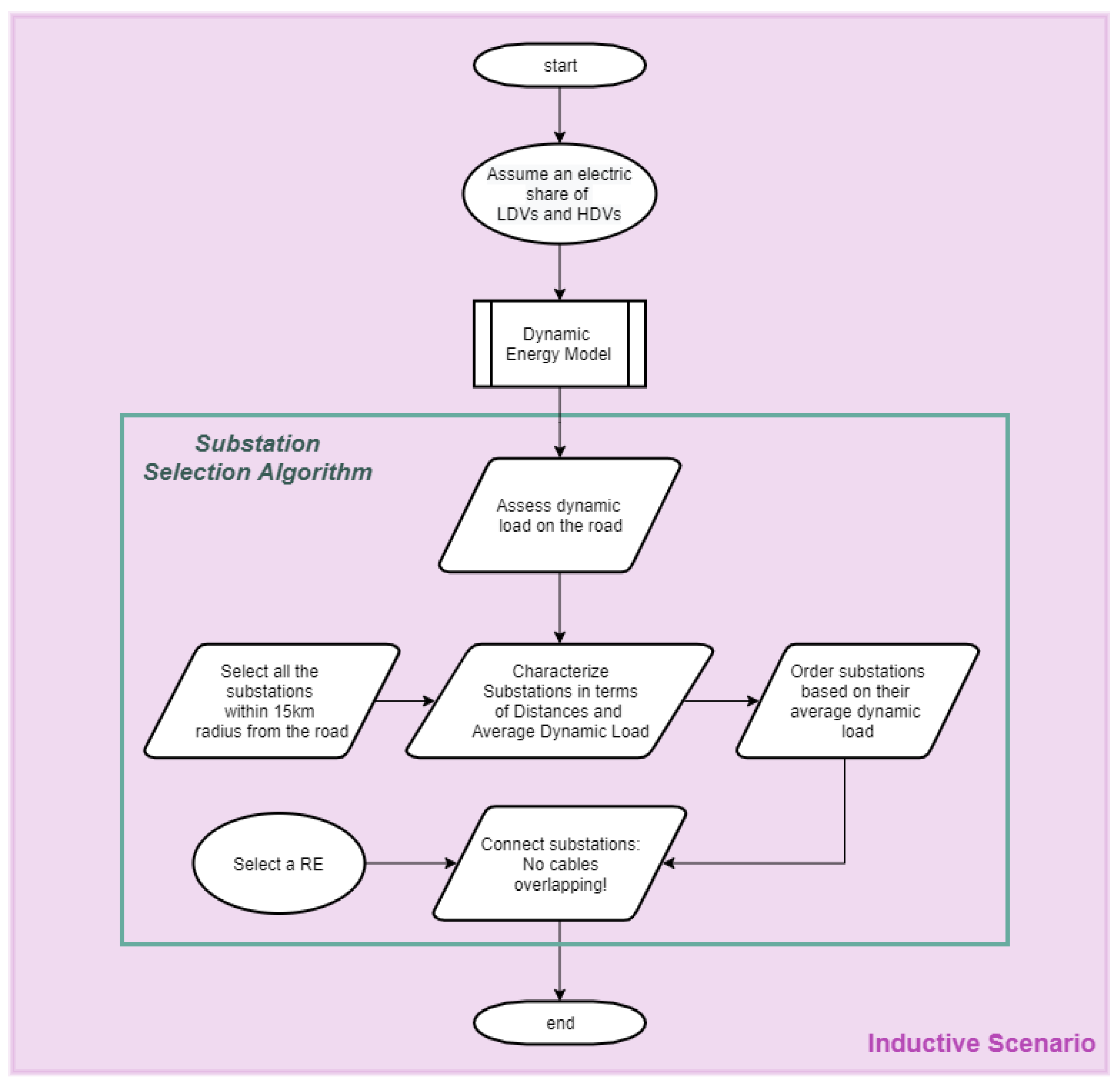
3.3.2. Inductive Scenario
- The Dynamic Energy Model produces an energy demand output along the highway, which depends mainly on the varying traffic flow.
- Medium-Voltage Substations in the near proximity of the highway are selected. The minimum requirements in order execute this step are the geospatial coordinates of the substations, and the voltage level of the transformer.
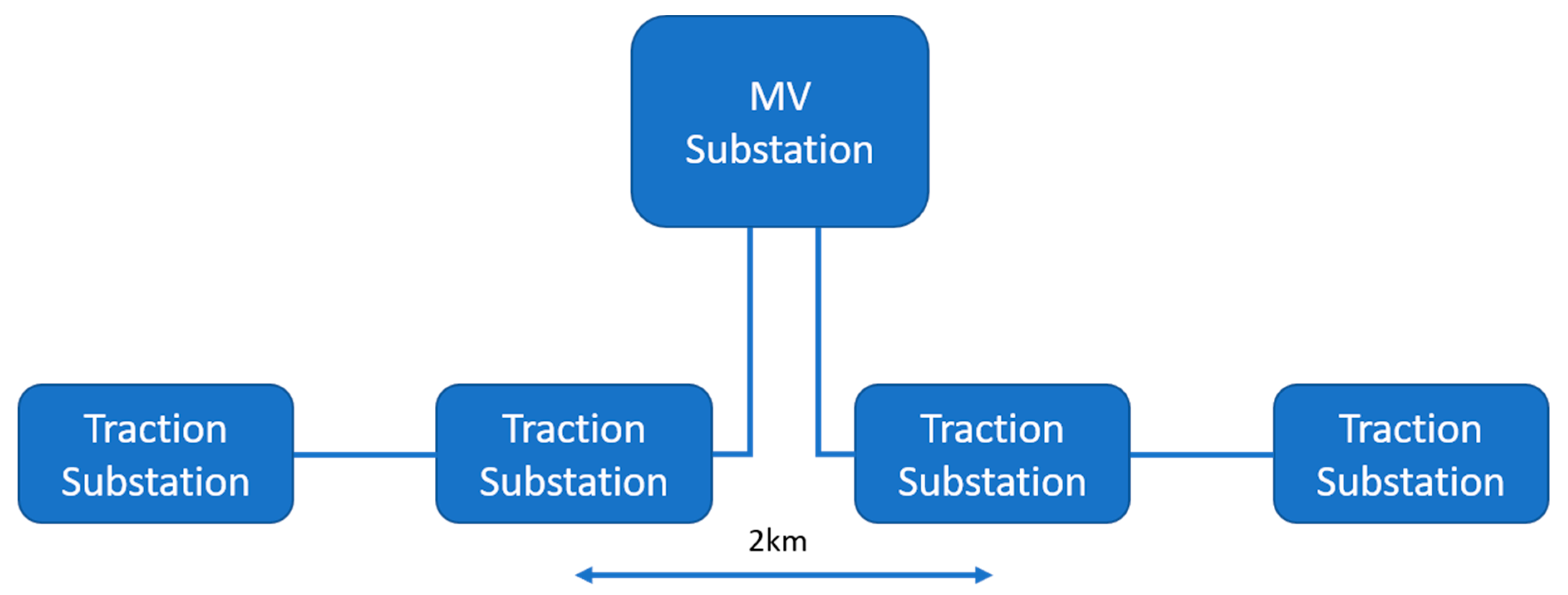
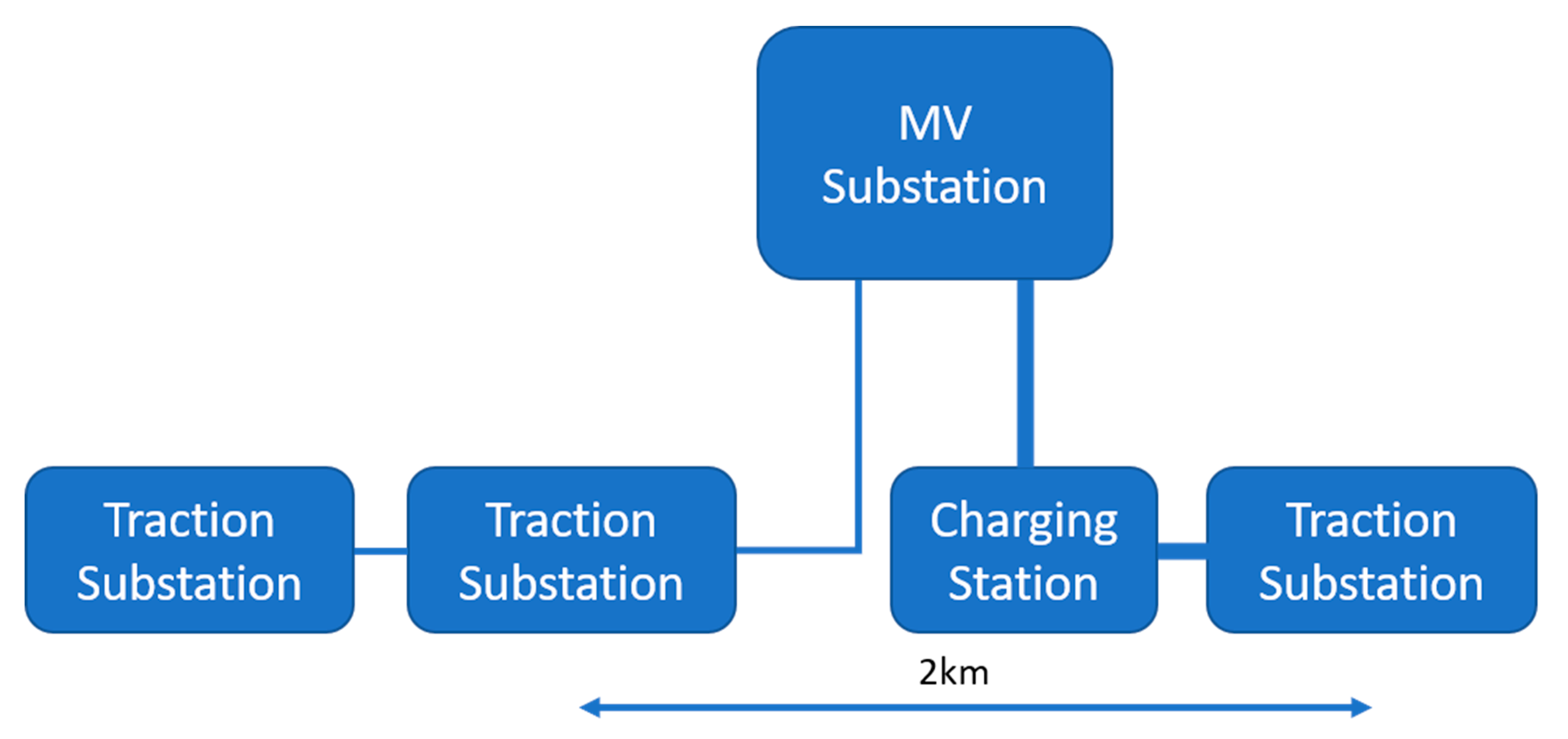
- The euclidean distance of a particular substation from the highway is defined as . As a first step, is calculated for all the substations. Secondly, two cables are stretched from each of them, as illustrated in Figure 3. Depending on the position at which the substations are located, and the traffic load present on the highway stretches, the length of the cables that are electrifying the highway will change due to voltage drop limits. The distance between the first traction substation supplied by the MV line and the last one is defined as . It is important to highlight that given a substation at distance from the highway and keeping all other factors constant (voltage level, type of cable, load on the cable etc.), we can say that and are in a relationship for which their sum remains constant. Thus, if is increased, decreases. This factor is central in the catenary design due to regulatory and economic disadvantages such as voltage drop, losses, and cabling costs. In [24], the authors state that taking into account a MV grid in the range of 11–22 kV that supplies only a catenary system, the maximum distance allowed for voltage regulations should be in the 10–20 km range. At the same time, increasing the line voltage (e.g., up to 30 kV) allows the length of the electrification stretch to be increased.
- Each substation is characterized by the energy it should hypothetically provide if it was part of the dynamic infrastructure. Substations are then sorted: the order reflects a trade-off between proximity to the highway and traffic level.
- One by one, the algorithm connects the substations to the highway, starting from the one which is characterized by the highest load. A condition in the algorithm ensures that cables do not overlap each other.
- The algorithm ends when a chosen share of the highway has been electrified, which is named the Rate of Electrification (RE).
- The Dynamic Energy Model is used to calculate their energy demand
- The SSA described in this chapter is applied
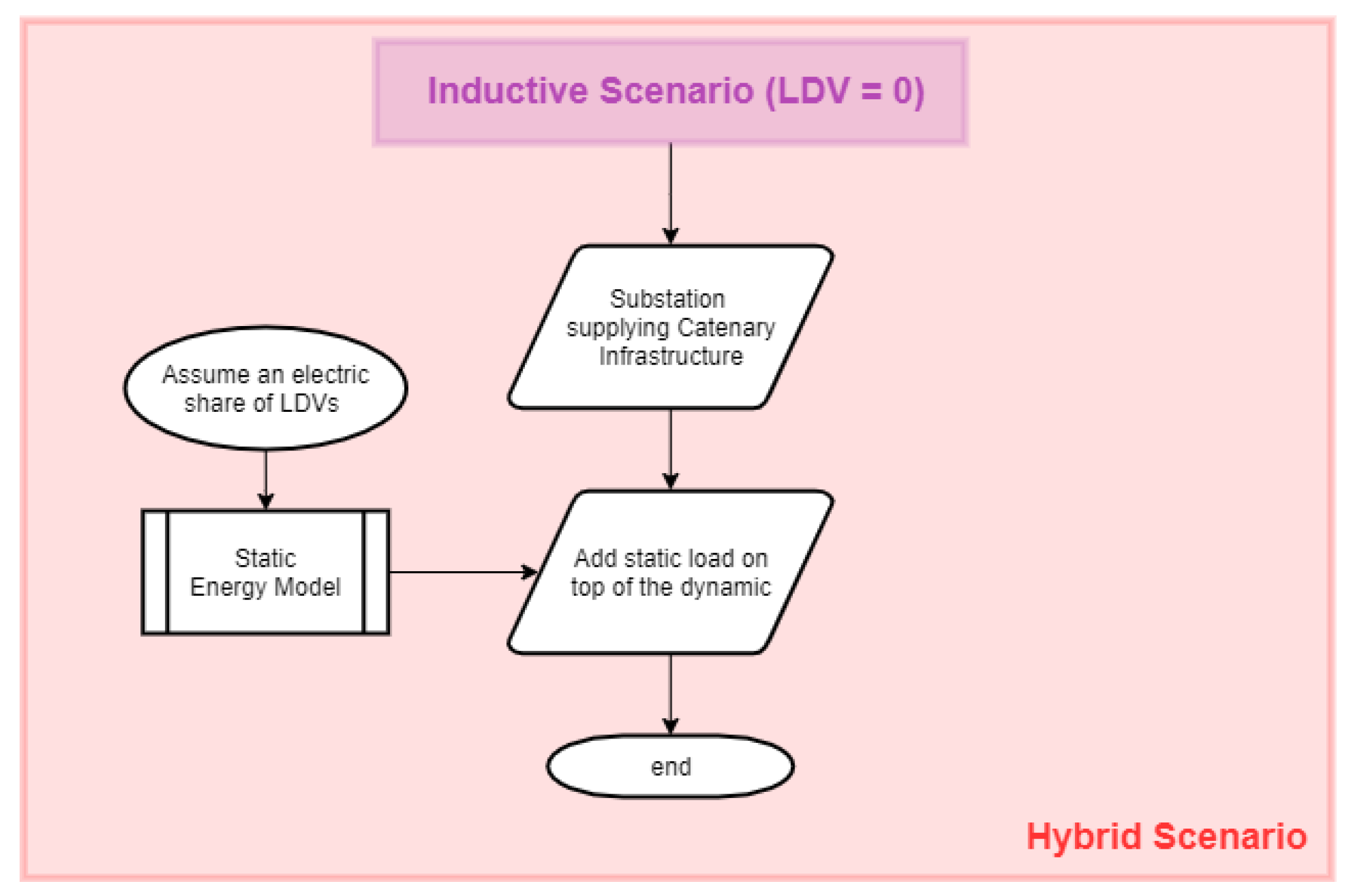
3.3.3. Hybrid Scenario
- The algorithm implemented for the selection of the substation for the hybrid scenario is the same as in the inductive scenario, with a small difference: only HDV traffic is taken into account for calculations, as shown in Figure 5.
- Finally, the selected substations receive on the spot the energy demand from LDVs charging at plug-in stations.
4. Case Study: Electrification of E18
4.1. Design
4.2. Input Data
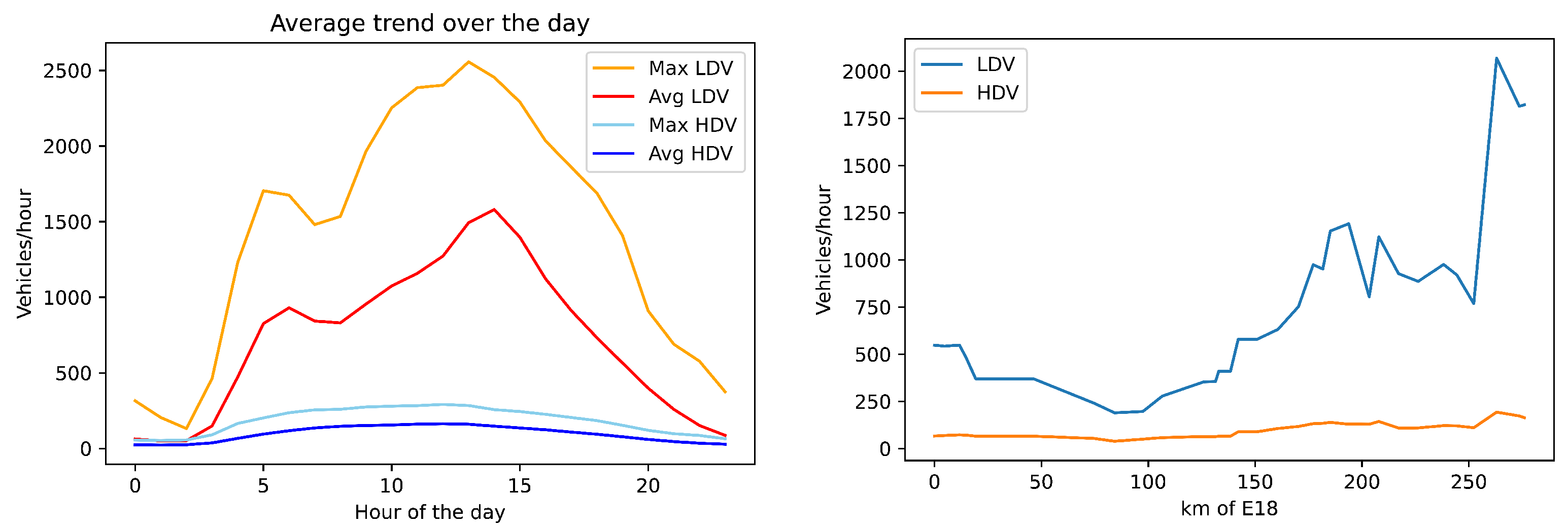
- Traffic. Inspired by [27], data of the hourly passing vehicles was downloaded from [28] for the year of 2019, for both HDVs (over 7.6 m of length) and LDVs (below 5.2 m), for a total of 35 measuring stations across the highway. In Figure 7, the spatial and temporal dependencies of the data input are presented.
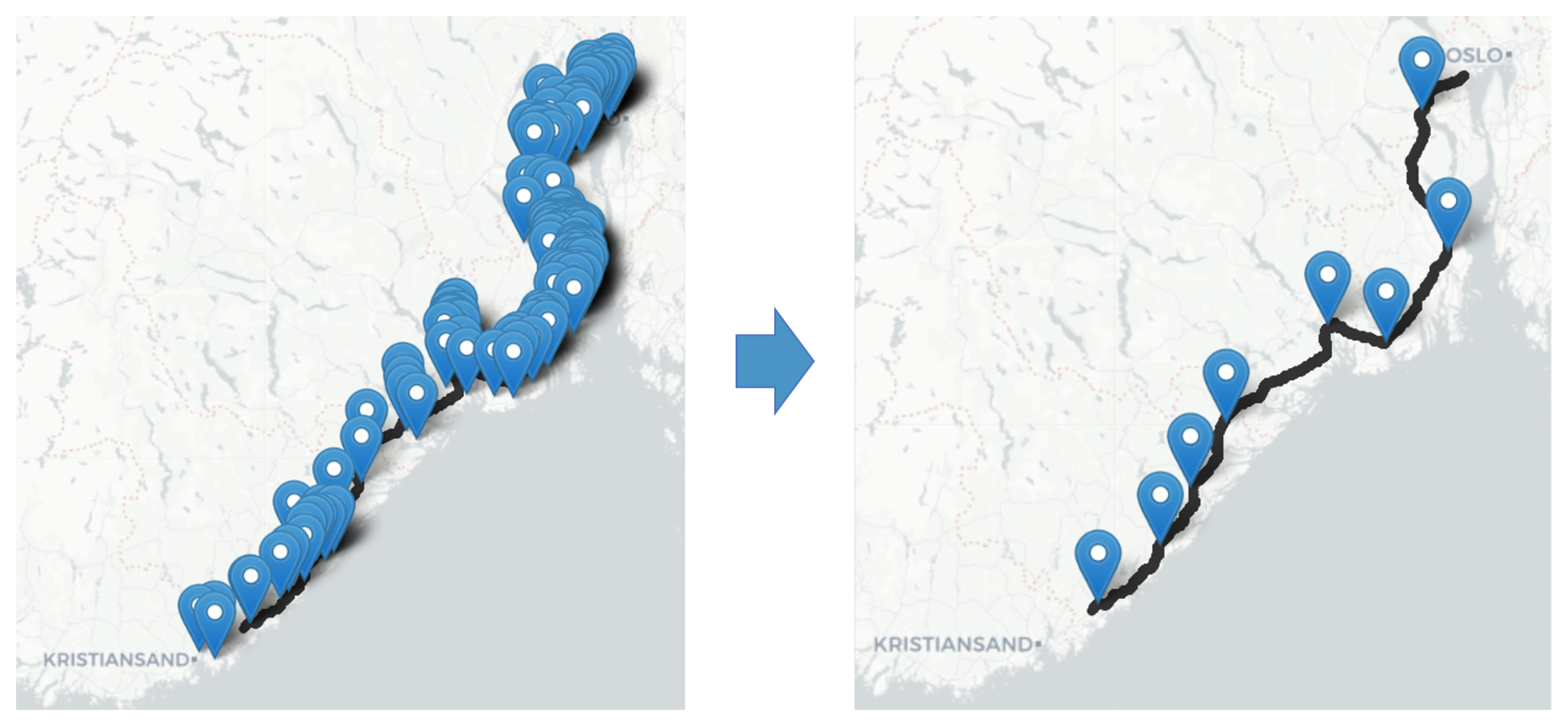
- Electric Infrastructure. The geolocations of the substations connecting the high-voltage to the medium-voltage grid were downloaded from the Open Street Maps dataset [29]. Then, a proximity analysis was implemented in order to filter only substations that were at a maximum distance of 15 km from the highway.
- Road Infrastructure. A graph of the highway is downloaded from Open Street Maps to follow distances and design the charging infrastructure with accuracy. The altitude profile of the road has been evaluated through Google Maps—from the analysis of the altimetrical profile, it is concluded that the contribution of regenerative breaking can be neglected. In fact, less than 1% of the road share is characterized by slopes over 2%.
Data Processing
4.3. Results
4.3.1. Static
4.3.2. Inductive
4.3.3. Hybrid
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- UNFCCC. The Paris Declaration on Electro-Mobility and Climate Change and Call to Action; UNFCCC: New York, NY, USA, 2015. [Google Scholar]
- European Parliament. Regulation of the European Parliament and of the Council setting CO2 Emission Performance Standards for New Heavy-Duty Vehicles; Technical Report; European Parliament: Brussels, Belgium, 2018. [Google Scholar]
- Gnann, T.; Plötz, P.; Kühn, A.; Wietschel, M. How to Decarbonise Heavy Road Transport? ECEEE Summer Study; European Council for an Energy-Efficient Economy: Stockholm, Sweden, 2017. [Google Scholar]
- Muncrief, R. Shell Game? Debating Real-World Fuel Consumption Trends for Heavy-Duty Vehicles in Europe; International Council on Clean Transportation: San Francisco, CA, USA, 2017. [Google Scholar]
- Kenny, S.; Cornelis, S.; Sihvonen, J.; Ambel, C.C. Roadmap to Climate-Friendly Land Freight and Buses in Europe; Technical Report; Transport & Environment: Brussels, Belgium, 2017. [Google Scholar]
- Bunsen, T.; Cazzola, P.; D’Amore, L.; Gorner, M.; Scheffer, S.; Schuitmaker, R.; Signollet, H.; Tattini, J.; Paoli, J.T.L. Global EV Outlook 2019 to Electric Mobility; OECD: Paris, France, 2019; p. 232. [Google Scholar]
- Mareev, I.; Becker, J.; Sauer, D.U. Battery dimensioning and life cycle costs analysis for a heavy-duty truck considering the requirements of long-haul transportation. Energies 2018, 11, 55. [Google Scholar] [CrossRef]
- Langhelle, O.; Bohne, R.; Nørbech, T.E. Electric Roads in Norway? Summary of a Concept Analysis; Technical Report; SINTEF: Trondheim, Norway, 2018. [Google Scholar]
- Nicolaides, D.; McMahon, R.; Cebon, D.; Miles, J. A national power infrastructure for charge-on-the-move: An appraisal for Great Britain. IEEE Syst. J. 2019, 13, 720–728. [Google Scholar] [CrossRef]
- Marquez-Fernandez, F.J.; Domingues-Olavarria, G.; Lindgren, L.; Alakula, M. Electric roads: The importance of sharing the infrastructure among different vehicle types. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific, Harbin, China, 7–10 August 2017. [Google Scholar] [CrossRef]
- Taljegard, M.; Göransson, L.; Odenberger, M.; Johnsson, F. Spacial and dynamic energy demand of the E39 highway-Implications on electrification options. Appl. Energy 2017. [Google Scholar] [CrossRef]
- IEA. Global EV Outlook 2020; IEA: Paris, France, 2020. [Google Scholar] [CrossRef]
- Arboleya, P.; Mayet, C.; Mohamed, B.; Aguado, J.A.; de La Torre, S. A Review of Railway Feeding Infrastructures: Mathematical Models for Planning and Operation. eTransportation 2020, 5, 100063. [Google Scholar] [CrossRef]
- Suul, J.A.; Guidi, G. Technology for Dynamic On-Road Power Transfer to Electric Vehicles—Overview and Electro-Technical Evaluation of the State-of-the-Art for Conductive and Inductive Power Transfer Technologies; ELinGo: Freiburg, Germany, 2018. [Google Scholar]
- Volkswagenag. Towards a ‘Zero Impact’ eHighway; Volkswagenag: Wolfsburg, Germany, 2018. [Google Scholar]
- Plötz, P.; Gnann, T.; Jochem, P.; Ümitcan Yilmaz, H.; Kaschub, T. Impact of electric trucks powered by overhead lines on the European electricity system and CO2 emissions. Energy Policy 2019. [Google Scholar] [CrossRef]
- Schulte, J.; Ny, H. Electric road systems: Strategic stepping stone on the way towards sustainable freight transport? Sustainability 2018, 10, 1148. [Google Scholar] [CrossRef]
- Taljegard, M.; Thorson, L.; Odenberger, M.; Johnsson, F. Large-scale implementation of electric road systems: Associated costs and the impact on CO2 emissions. Int. J. Sustain. Transp. 2019, 1–14. [Google Scholar] [CrossRef]
- Zhao, H.; Qian, W.; Fulton, L.; Jaller, M.; Burke, A. A Comparison of Zero-Emission Highway Trucking Technologies; University of California Institute of Transportation Studies: Berkeley, CA, USA, 2018; p. 58. [Google Scholar] [CrossRef]
- Malik, F.H.; Lehtonen, M. Analysis of power network loading due to fast charging of Electric Vehicles on highways. In Proceedings of the 2016 Electric Power Quality and Supply Reliability (PQ), Tallinn, Estonia, 29–31 August 2016; pp. 101–106. [Google Scholar] [CrossRef]
- Ivarsøy, E.; Torsæter, B.N.; Korpås, M. Stochastic Load Modeling of High-Power Electric Vehicle Charging—A Norwegian Case Study. In Proceedings of the 2020 International Conference on Smart Energy Systems and Technologies (SEST), Istanbul, Turkey, 7–9 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Ji, H.; Zhang, W.; Pan, X.; Hua, M.; Chung, Y.; Shu, C.; Zhang, L. State of health prediction model based on internal resistance. Int. J. Energy Res. 2020, 44, 6502–6510. [Google Scholar] [CrossRef]
- Gkatzoflias, D.; Drossinos, Y.; Zubaryeva, A.; Zambelli, P.; Dilara, P.; Thiel, C.; Doi, E. Optimal Allocation of Electric Vehicle Charging Infrastructure in Cities and Regions; Technical Report; European Commission: Luxembourg, 2016. [Google Scholar] [CrossRef]
- Rennemo, O.; Hjelkrem, O.A.; Terje, K.; Suul, J.; Brauhaus, P.; Aamodt, A. Energy and Infrastructure-Demands and Requirements Work Package 3; Technical Report; 2018; Available online: https://www.sintef.no/globalassets/project/elingo/18-0733-rapport-5-memo-work-package-3-til-nett.pdf (accessed on 20 May 2020).
- Skoglund, J. Her Blir Det Mulighet for påfyll og hvile: Det 36 mål Store Veiserviceanlegget åpner før Sommeren; Veier24.No: Oslo, Norway, 2019. [Google Scholar]
- Tesla. Tesla Superchargers |Tesla. Available online: https://chargeatlas.com/by_id/grenstolsupercharger.html (accessed on 20 May 2020).
- Berg, K.; Hjelkrem, O.A.; Torsæter, B.N. A proposed methodology for modelling the combined load of electric roads and households for long-term grid planning. In Proceedings of the 2020 17th International Conference on the European Energy Market (EEM), Stockholm, Sweden, 16–18 September 2020. [Google Scholar] [CrossRef]
- Trafficadata. Available online: https://www.vegvesen.no/ (accessed on 20 May 2020).
- OPS. OpenStreetMap. Available online: https://www.openstreetmap.org/ (accessed on 27 January 2021).
- Ivars, E. Optimal Planning of Fast Charging Stations for EVs—A Norwegian Case Study. Master’s Thesis, NTNU, Trondheim, Norway, 2020. [Google Scholar]
- Gustavsson, M.G.H.; Hacker, F. Overview of ERS Concepts and Complementary Technologies; Swedish-German Research Collaboration on Electric Road Systems, Ed.; Technical Report; CollERS Report; 2019; Available online: https://www.electricroads.org/report-overview-of-ers-concepts-and-complementary-technologies/ (accessed on 20 May 2020).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Range | |||
|---|---|---|---|
| Time (h) | LDV | HDV | |
| (km) | 25/125 | 120/400 | |
| d | −1/+1 | 0.63 | |
| 0–12 12–24 | 0.6/0.8 0.3/0.5 | 0.6/0.8 0.3/0.5 | |
| (kWh) | 15/25 | 54/180 | |
| 5 | 0.45 | ||
| LDV | HDV | |
|---|---|---|
| Mass (kg) | 1500 | 40,000 |
| Air resistance coefficient | 0.3 | 0.63 |
| Front area of the vehicle (m) | 2.1 | 3 |
| Average speed (km/h) | 80 | 80 |
| Acceleration values (m/s) | 1.5 | 1 |
| Rolling resistance coefficient | 0.012 | 0.007 |
| Efficiency | Distance (m) | |
|---|---|---|
| Inductive | 0.77 | 2000 |
| Catenary | 0.77 | 2000 |
| Plug-in | 0.73 | 50,000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Danese, A.; Garau, M.; Sumper, A.; Torsæter, B.N. Electrical Infrastructure Design Methodology of Dynamic and Static Charging for Heavy and Light Duty Electric Vehicles. Energies 2021, 14, 3362. https://doi.org/10.3390/en14123362
Danese A, Garau M, Sumper A, Torsæter BN. Electrical Infrastructure Design Methodology of Dynamic and Static Charging for Heavy and Light Duty Electric Vehicles. Energies. 2021; 14(12):3362. https://doi.org/10.3390/en14123362
Chicago/Turabian StyleDanese, Alberto, Michele Garau, Andreas Sumper, and Bendik Nybakk Torsæter. 2021. "Electrical Infrastructure Design Methodology of Dynamic and Static Charging for Heavy and Light Duty Electric Vehicles" Energies 14, no. 12: 3362. https://doi.org/10.3390/en14123362
APA StyleDanese, A., Garau, M., Sumper, A., & Torsæter, B. N. (2021). Electrical Infrastructure Design Methodology of Dynamic and Static Charging for Heavy and Light Duty Electric Vehicles. Energies, 14(12), 3362. https://doi.org/10.3390/en14123362