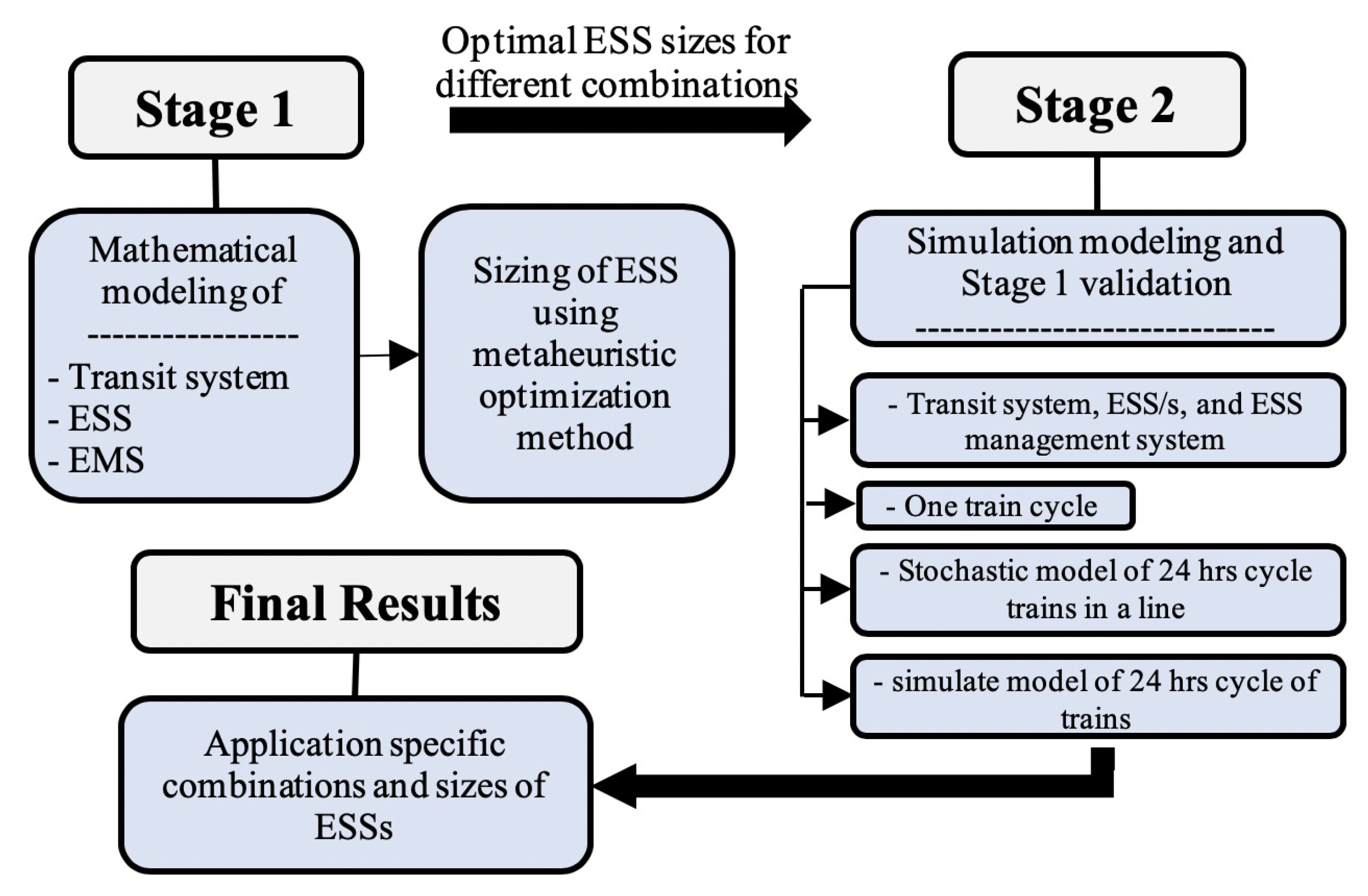
This section describes the first stage, consisting of mathematical modeling and optimization, of the two-stage framework proposed in this paper.
3.1. Mathematical Modeling
The ESSs may consist of a standalone BESS/SCESS/FESS or a combination of any two of the three types of ESSs. Thus, energy recuperated and discharged by the storage systems, at the low voltage side of a converter, can be formularized as Equations (
1) and (
2), respectively:
where
represents a binary number that can assume either 0 or 1 for battery/supercapacitor/flywheel but cannot assume the same value for all the three types of ESS at the same time. Such a condition eliminates the condition where none or all the three types of ESSs are deployed. The total energy captured/generated by ESSs, as expressed by (
1) and (
2), comprise independent contributions from BESS, SCESS, and FESS, which are expressed in the subsequent discussions. The efficiency of a BESS is contingent on its state of charge (SoC) constraints during both charging and discharging. SoC is expressed as
and the constraints on minimum/maximum limits of SoC of a battery during constant current discharging/charging are expressed in (
3) and (
4), respectively:
In this work,
are 30% and 40%, respectively, since degradation of a battery is minimum if its SoC remains within 30% and 80% of the full capacity [
17,
18].
The amount of energy, by which a BESS gets charged, can be expressed by (
5):
such that
and
. The objective behind the limits of integration in (
5) is to operate the battery within
and
. The open-circuit voltage
of a battery, as a function of SoC, increases from
to
as the SoC varies from
to
, respectively [
27]. If a BESS is functional for every acceleration and deceleration of the train, which happens within a span of 27–30 s, the C-rate for charging/discharging can be expected to be higher than 1C. Such a condition will cause the
of the battery to change from
to
within a very short period of time (around 27–30 s), so as to render an almost linear increase in
. Accordingly, the regenerative energy captured by the BESS, as derived from (
5), is expressed in (
6):
Similarly, the magnitude of energy contributed by the BESS during a train acceleration can be quantified as (
7):
The discharge current and time of a battery are not linearly related to its capacity in Ah. According to Peukert’s equation, the discharge time of a battery reduces for a higher C-rate of discharge, which is expressed in (
8) [
28]. Thus, (
8) acts as a nonlinear constraint on the battery discharge current and capacity. It is to be noted that there is no review yet of the application of Peukert’s equation on the charging current of a battery in literature:
According to (
8), a battery of capacity
discharging a current of
will get completely depleted within a time of
. However, it is not desirable for the SoH of the battery cells to be entirely depleted. Thus, a fraction of
has been considered in (
9) during which the battery remains operational;
The quantification of energy discharged by a BESS is concluded in (
10) by replacing (
8) and (
9) in (
7). The optimization method will search for the most suitable combination of charging/discharging current
and capacity
of the battery:
The SCESS has been sized in an approach similar to that of BESS. Expressions for energy recuperated and discharged by the supercapacitor are formulated by (
11) and (
12), respectively:
In (
11) and (
12), it is assumed that the SCESS has a constant charging/discharging current which will entail a trapezoidal shaped power profile. In addition, constraint on the minimum open-circuit voltage of the supercapacitor has been also considered in these two equations. This constraint is explicitly mentioned in (
13):
Change in voltage across a SC is rather nonlinearly related to the charge/discharge current [
28]. Equations for energy of the SCESS, as expressed by (
11) and (
12), do not consider this nonlinearity and are simplified to minimize the number of variables in the optimization problem. The fact that this linearization does not introduce unacceptable errors is verified by simulation, which uses a nonlinear model of the SC. The optimization process will determine the most suitable values for
. Thus, capacity of the SCESS in terms of energy can be obtained from its power rating subjected to the constraint in (
13).
Expressions for energy recuperated and discharged by a flywheel are illustrated by (
14) and (
15), respectively:
where
is the ratio between maximum and minimum angular speed of a flywheel. (
14) and (
15) are subjected to the constraints mentioned in (
16) and (
17) for a flywheel:
The following equations, from (
18) to (
20), represent the restrictions on energy captured and discharged by the comprising ESSs in (
1) and (
2). Each individual type of ESS should discharge as much amount of energy during train acceleration as it charged during a train deceleration, in order for it to be prepared to charge for the next train deceleration. This is expressed by (
18), (
19), and (
20) for BESS, SCESS, and FESS, respectively. These constraints are significant as the time duration for train acceleration and deceleration are usually not equal. In addition, charging and discharging efficiencies of ESS and converters are also different:
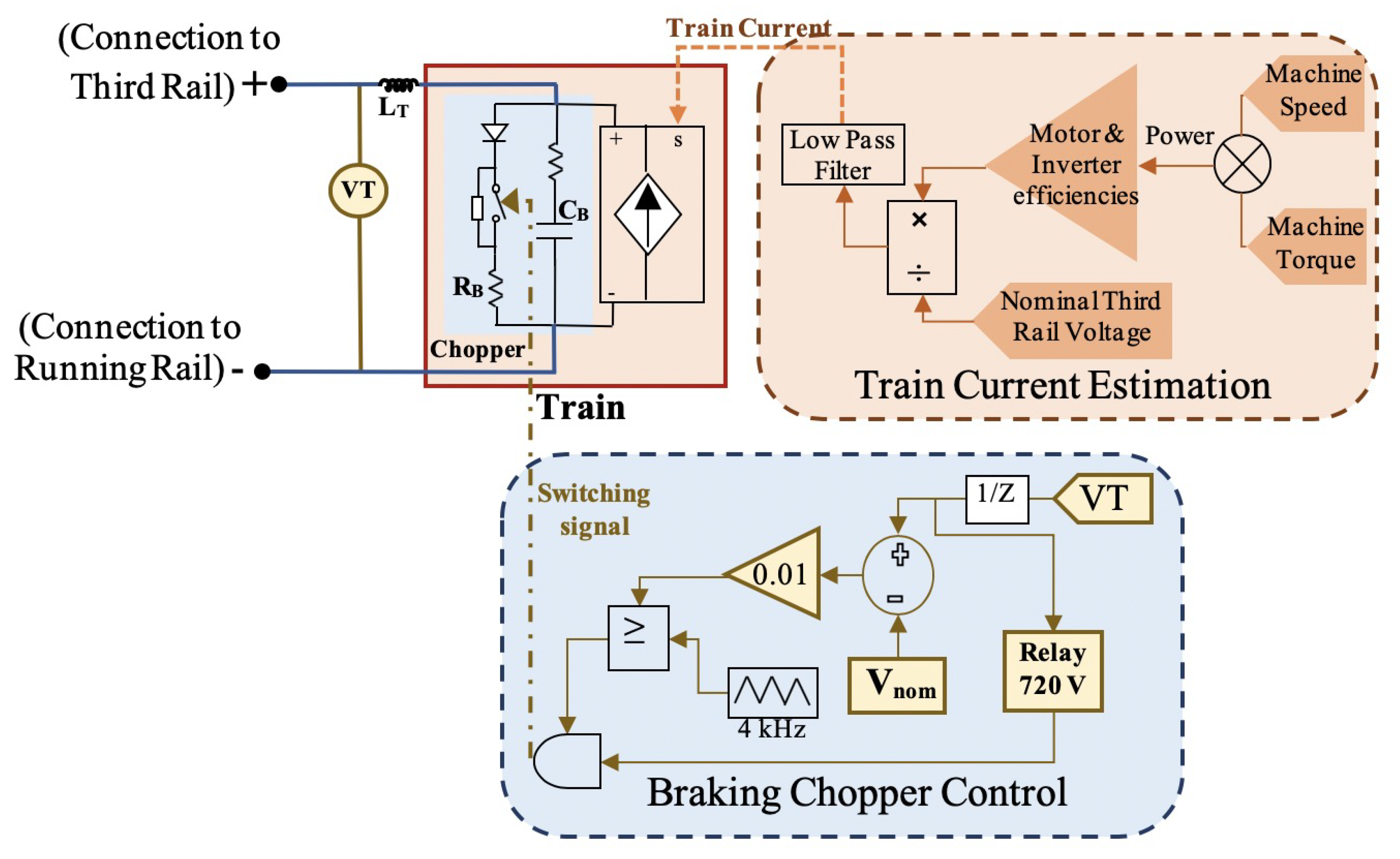
The total current that is regenerated by a train is partly lost in a chopper and partly sent to the third rail based on the voltage level of the latter [
12]. In order to comply with the lower and upper voltage limits of third rail, instantaneous power on either side of the bidirectional converter should be compared. Thus, constraints on the rail transit system can be expressed by (
21), which considers minimum/maximum limits on third rail voltage:
The objective of this optimization is to obtain sizes and type of ESS, in order to capture/contribute to the magnitude of energies specified in (
1) and (
2), so as to incur a minimum capital and operating cost. The capital and running costs are demonstrated in (
22) and (
23), respectively:
In (
22), the first and second terms represent capital costs for energy and power ratings of BESS, respectively. Similarly, the third and fourth terms express capital costs for energy and power ratings of SCESS, respectively. Finally, the fifth and sixth terms express capital costs for energy and power ratings of FESS, respectively:
In (
23), the first, second, and third terms stand for operating costs of BESS, SCESS, and FESS, respectively. It is to be noted that, in the first term, a modified parameter for number of BESS cycles have been used. This is because operating costs of BESS depend on its life-cycle cost, which in turn is related to its
DoD, expressed in (
24):
As the battery is not entirely discharged/charged for every cycle of train acceleration/deceleration, the actual number of battery cycles can be expressed as (
25):
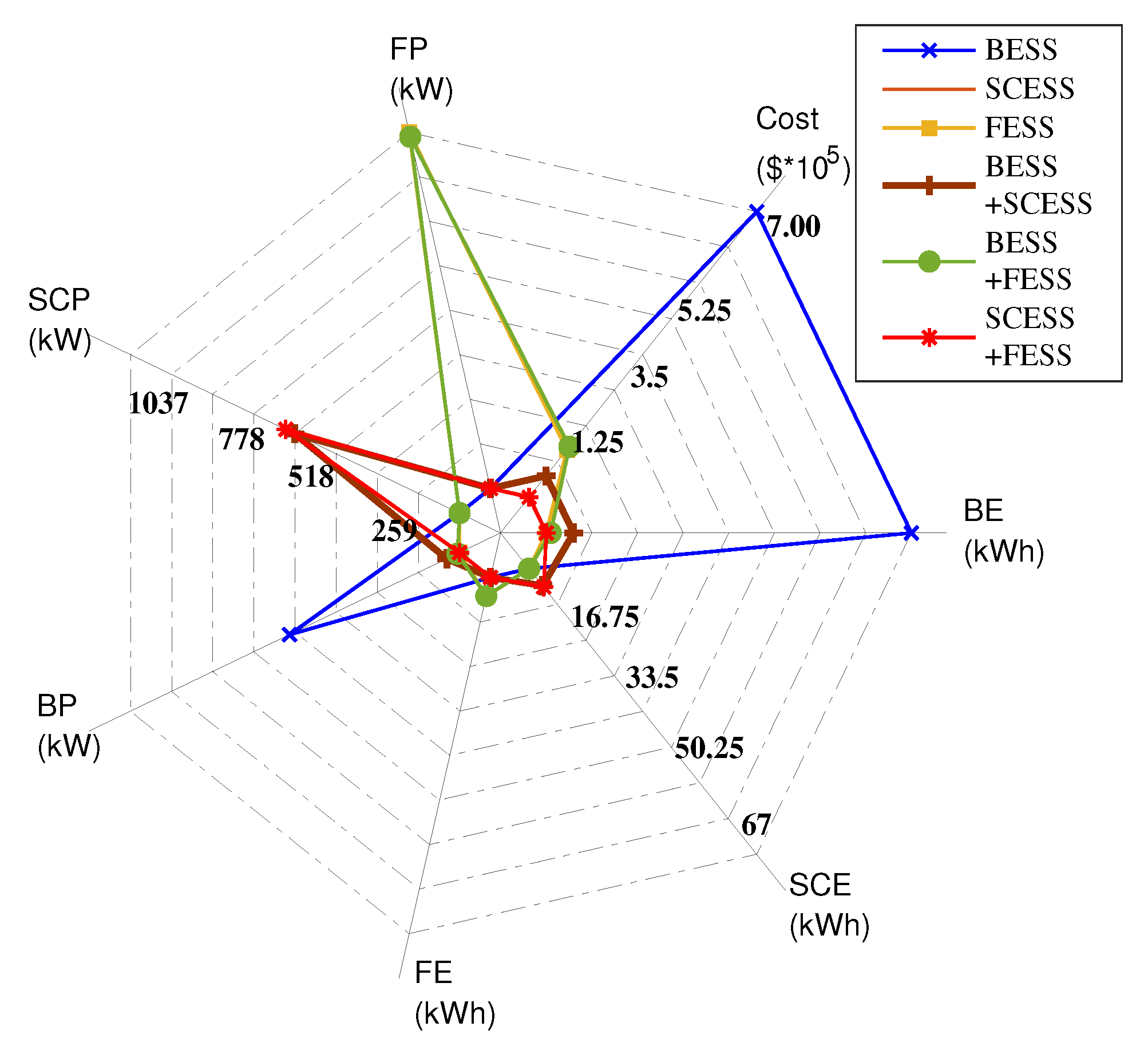
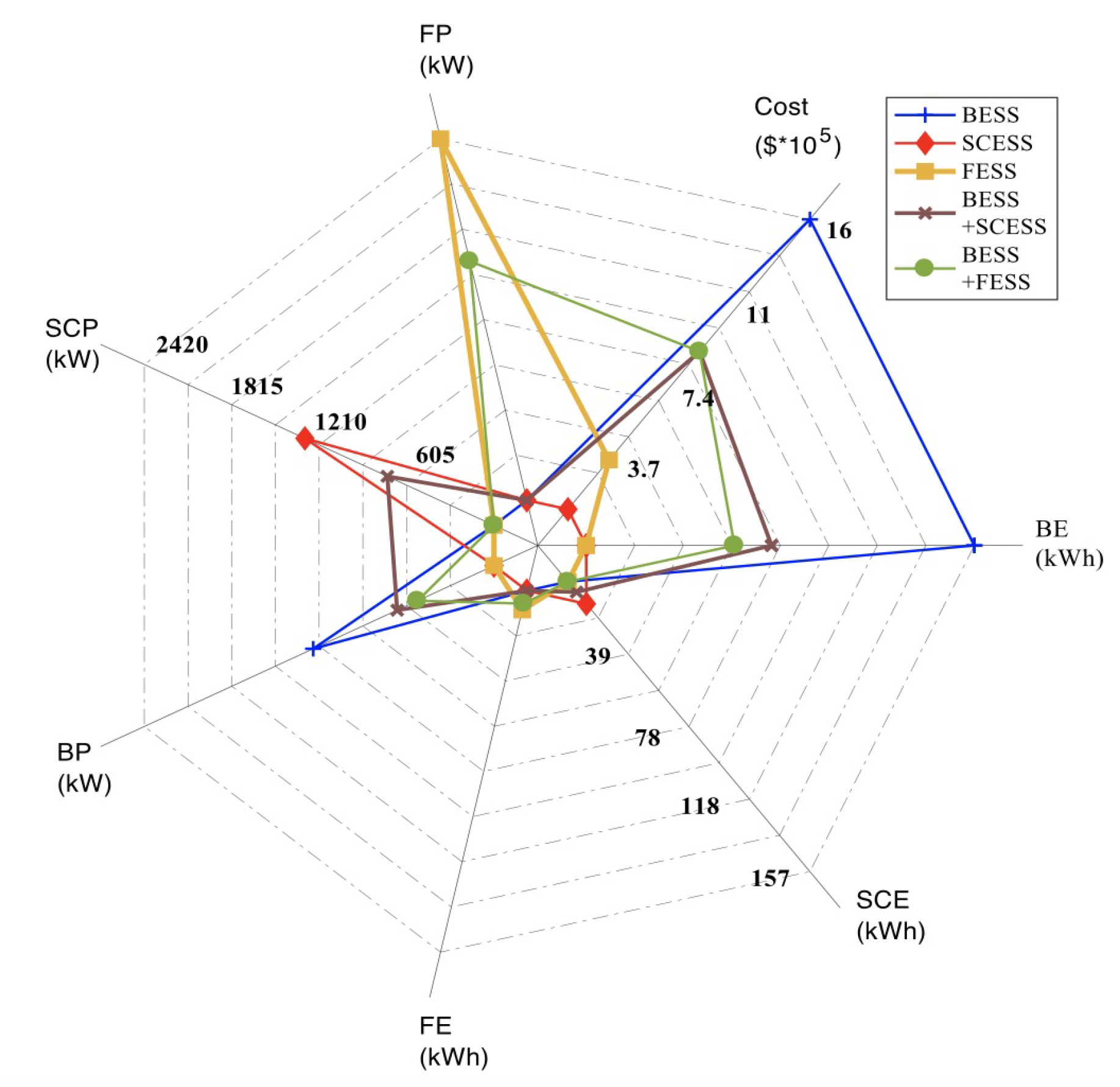
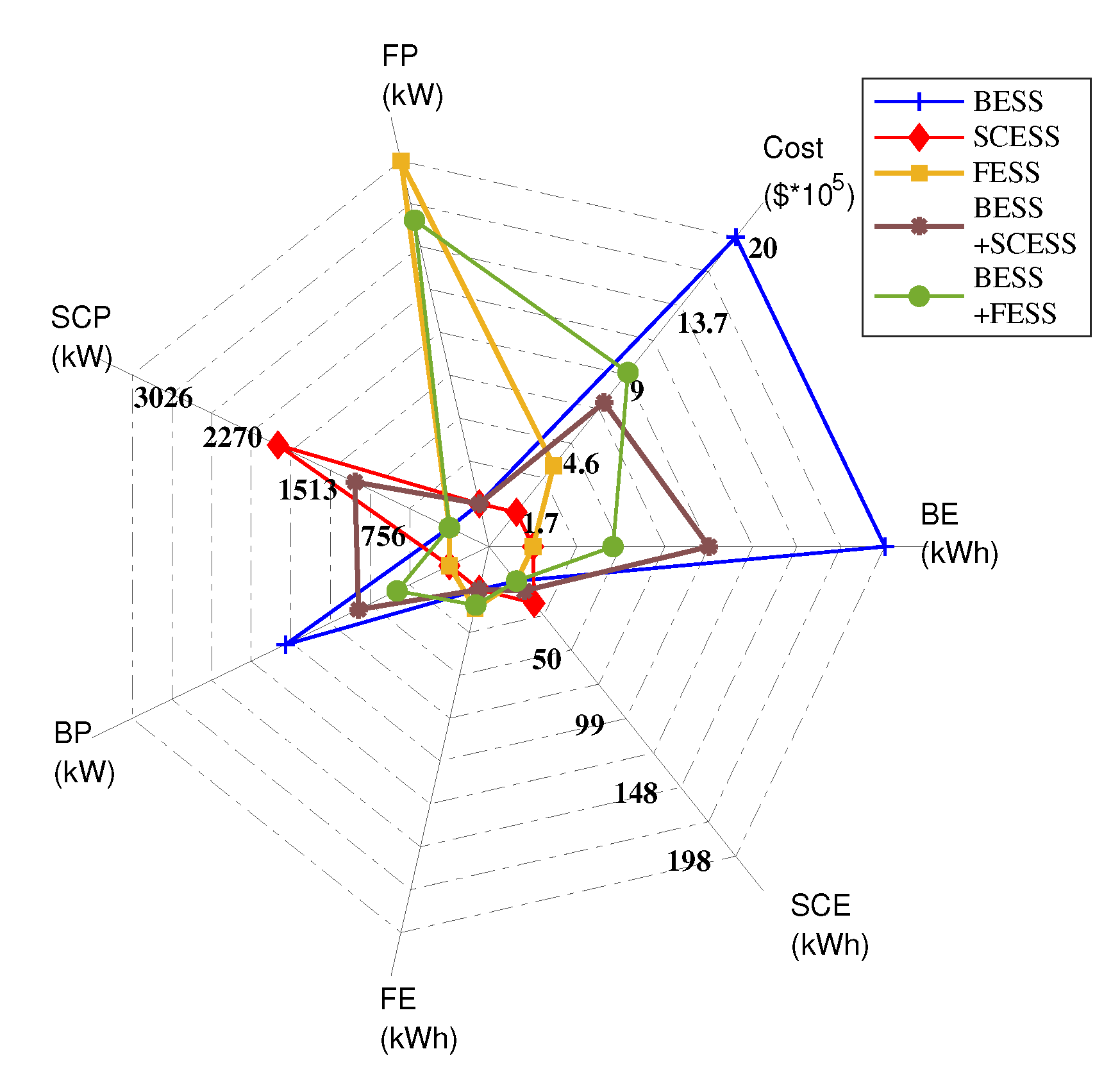
Feasibility of the sizes and combinations of ESSs can be evaluated with the help of cost savings, as expressed in (
26). This equation estimates the cost savings in terms of (a) energy consumption from utility that gets reduced due to the use of ESSs, and (b) peak power shaving in a 24 hr cycle of trains:




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



















