1. Introduction
Compared to direct current electric motors, induction motors (IMs) have a lower cost and higher efficiency, require lower maintenance, and have been replacing them in variable speed operations with increasing use in the past twenty years [
1]. In variable speed applications, the IM is fed by different types of alternating current (AC) drives [
2], which differ in their performance with respect to the starting torque, transient speed behavior, and steady-state speed-accuracy of the desired speed [
1]. For low, medium, and high-performance applications, three main control schemes are used: scalar control scheme (SCS) [
3], direct torque control (DTC) [
4], and field-oriented control (FOC) [
5,
6] respectively. There is also a simpler AC/AC soft starter based on thyristors [
3], but it does not allow variable speed operation. It only reduces the starting stator current while moving low starting torque loads. This reduction is made by reducing the starting voltage applied to the motor.
The AC drive with a rotor speed closed loop (CL), based on FOC or DTC, is used for high-performance applications, such as winding and takeoffs. Its capabilities consist of starting with torque around 150% of the nominal torque, having a rapid and no oscillatory transient speed behavior, and exhibiting 0.01% of steady-state speed accuracy. It needs parameter estimators to compute its characteristic variable slip frequency of operation. The AC drive based on sensorless DTC or sensorless FOC, is used for medium-performance applications. These consist of cranes, positive displacement pumps, and compressors. Its capabilities consist of starting with torque around 120% of the nominal torque, having a rapid and no oscillatory transient speed behavior, and 0.1% of steady-state speed accuracy. It needs parameter estimators and variable observers to compute its characteristic direct torque and flux control. In contrast, the cheapest AC-drive-based SCS is used for low-performance applications. Examples of these include blowers, fans, and centrifugal pumps. SCS only needs the rated voltage per phase and the frequency taken from the motor data plate. It moves loads needing a starting torque lower than 40% of the nominal torque [
7] with 1% to 3% of steady-state speed accuracy and nonrapid and even oscillatory transient behavior [
8,
9,
10]. These facts about SCS remain even if a CL speed control is considered as mainly improving steady-state accuracy [
9]. This is the reason why FOC is finally proposed in [
10] to reach a higher performance. Oscillatory transient behavior issues of the SCS are studied in detail in [
11].
Several research works aim to improve the simplest SCS [
12,
13,
14,
15,
16,
17]. Compared to the DTC [
4] and the FOC [
5,
6], the SCS needs neither parameter estimators nor estimator or sensor of the rotor speed. SCS schemes [
3,
12,
13,
14,
15,
16,
17] assume that the electrical angular speed is equal to the reference rotor angular speed, neglecting the slip, or equals to the reference rotor angular speed plus an estimated slip. These are the simplest and most effective ways the estimated rotor angle is implemented. Improvements in works [
12,
13,
14,
15] consider estimating the slip to improve the rotor steady-state speed-accuracy. The electromagnetic torque is estimated in [
12], and later the slip is based on this estimate. The gap power is estimated in [
13] and then the slip is estimated, adjusting also the boost voltage. The slip is calculated based on a stator flux observer in [
14], which depends on parameter estimators. A simpler slip calculation scheme is proposed in [
15], where the computing depends on the rated stator current and the rated slip. The speed control of all these SCS schemes has an open-loop (OL) speed control.
In addition, to improve the steady-state rotor speed accuracy of the SCS, a CL speed controller is proposed in [
16]. The required electrical frequency is set by a CL speed fuzzy controller in [
16]. It depends on the measurement of a rotor angular speed sensor. A rotor angular speed observer based on a spectral search method is proposed in [
17] to improve the SCS speed monitoring. It is suggested in [
17] that this monitoring could be used in other works to develop a CL sensorless SCS, but this is not fully addressed by [
17].
All these schemes [
12,
13,
14,
15,
16,
17] aim to improve the accuracy of the steady-state rotor speed. They all need parameter estimators, depending on the accuracy of the estimates. The low starting torque issue of the SCS is not addressed in these references from [
12,
13,
14,
15,
16,
17]. It is in this paper where a solution is suggested.
The mining and minerals industry, for instance, has machinery such as conveyor belts. These need high starting torque but no steady-state speed accuracy. One employed solution is to consider AC drives with a DTC or FOC scheme, paying an over cost. Another solution considers an AC drive with SCS to move the belt conveyors unloaded at the start. This last solution has an issue when unforeseen detentions occur. This paper aims to propose an alternative simple solution to move high starting-torque loads. It uses for current-control purposes the same current sensors used today by the basic SCS for motor protection. Compared to the DTC [
4] and the FOC [
5,
6], the proposed high starting torque (HST)-SCS needs neither parameter estimators, variable observers, nor estimator or sensor of the rotor speed. As a result, it moves loads needing a starting torque around 100% of the nominal torque from 1% to 3% of steady-state speed accuracy and nonrapid and even oscillatory transient behavior [
8,
9,
10]. It expands the applications of the SCS but is not capable of substituting the FOC nor DTC schemes.
The main contribution of this paper is the proposal of an HST-SCS. It adds a CL adaptive-passivity-based controller (APBC) for current to the basic SCS. This is based on the adaptive theory from [
18,
19] developed for linear dynamical systems but extended herein for a class of nonlinear dynamical systems expressed in the normal form, which has a linear explicit parametric dependence with a linear internal dynamic and encompasses the IM model. The use of normalized FG is proposed to adjust the adaptive controller parameters.
The paper is organized as follows:
Section 2 describes the IM model, the basic SCS method, and the APBC basis. The proposed APBC method for a class of nonlinear systems is proposed in
Section 3. Experimental results comparing basic SCS and the proposed HST-SCS are described in
Section 4. Finally, in
Section 5, some conclusions are drawn.
3. HST-SCS Proposal
As previously described, it can be seen from (3) that the flux modulus
is proportional to the quotient of the phase rated stator voltage and the rated frequency (after neglecting the stator voltage drop in the stator impedance). However, from (3), it can also be seen that the flux modulus
is proportional to the modulus of the magnetizing current
. Replacing
from (A2), we get
Considering Equation (5), we explore how to keep a constant by keeping a constant stator phase current to guarantee an HST. This is obtained from (A3) and results as .
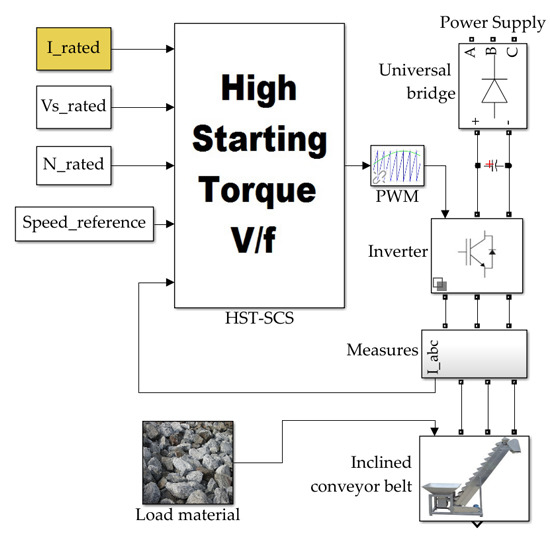
3.1. HST-SCS for IM
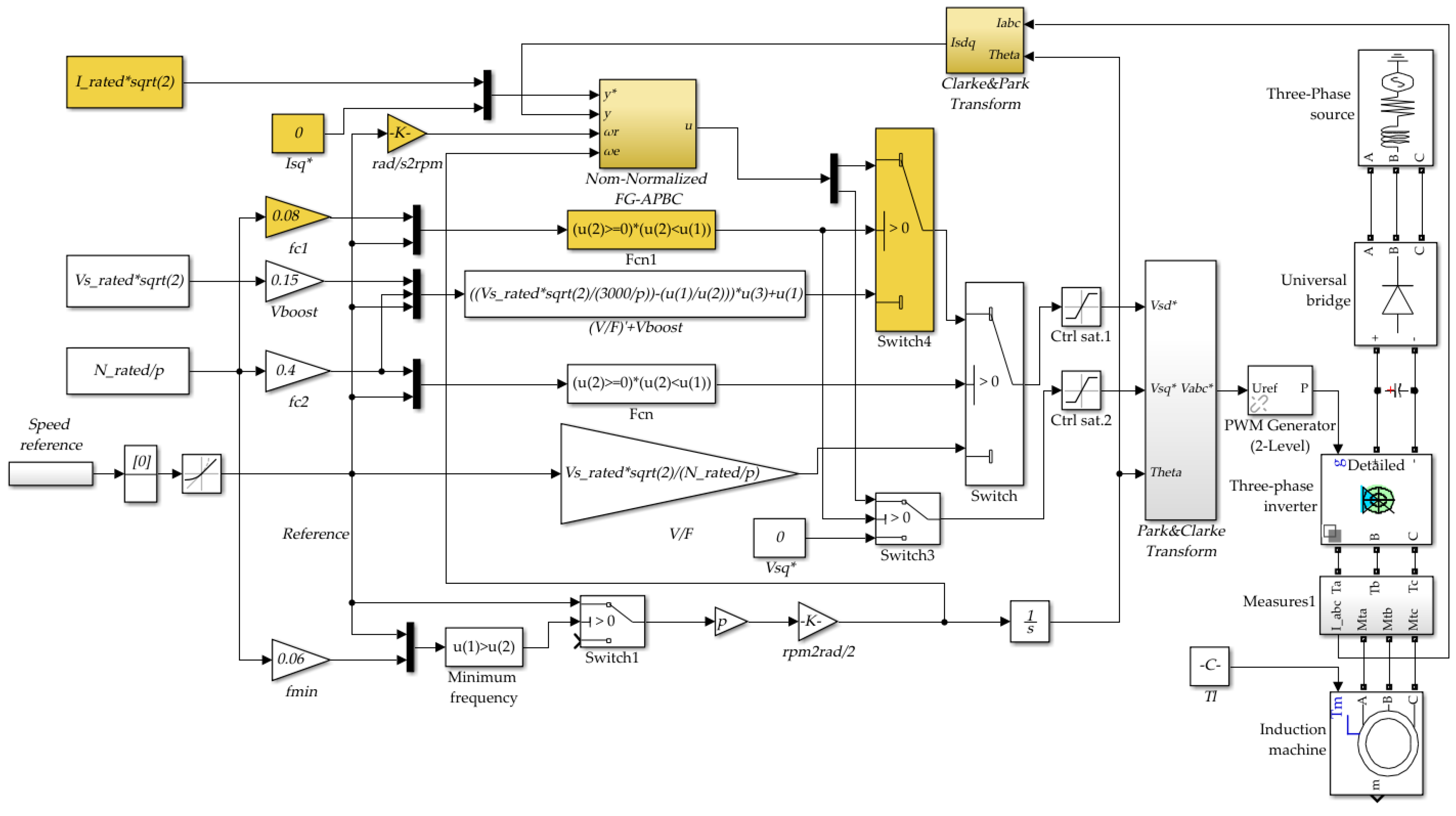
A general diagram of the proposed HST-SCS is shown in
Figure 2. Here, a new HST control loop (marked in yellow) operating from the minimum frequency
to the lower frequency
was added to the basic SCS. It moves the
operation from
to
, keeping the
operating from
to
. The new transition frequency
from HST control to
control is lower than
.
In the proposed HST-SCS, Equation (1) takes the form
where the added HST control loop
is the adaptive HST controller parameter, depending on the fixed-gains
and the information vector
.
,
, and
are all defined in
Section 3.2.
3.2. Normalized FG-APBC
The APBC basis for tracking and regulation purposes is thoroughly described in [
19] for nonlinear dynamical systems with unknown parameters. It will be extended in this paper for the class of nonlinear dynamical systems (4) and using a normalized FG.
Due to the characteristics of the internal dynamics
z of Equation (4), Laplace transform [
24] can be applied. Considering constant
D and
C, and assuming initial condition
,
is obtained. Applying the final value theorem [
24], i.e.,
, we have
. Thus, after replacing
in the terms
of Equation (4), we get that
, and the dynamical system (4) takes the form
where the output variable
and the input (control) variable
are accessible. All system parameters
and
are unknown with
B invertible, and
is the known time constant of the system (7). It is assumed that
sign(B) is known. The system function
is known.
For the IM case, in Equation (7), the system function , the system parameters are , and .
In what follows, the adaptive controller is proposed.
Theorem 1. Let us consider the nonlinear system (7) with unknown parameters. The following adaptive controller isguarantees that . Here, is the known required output, fixed by the operator, is the controller (8) output, applied to the system (7) input, and the controller parameters K and are adjusted by the designer. Here, is the accessible information vector given bywhere K is a Hurwitz matrix chosen by the designer as with the known time constant of system (7), and are the adaptive controller parameters adjusted through the adaptive lawsHere, the fixed-gains is a diagonal matrix computed according to the following normalized FG equationwith is the rated information vector defining the operational range of , is a positive adjustable parameter chosen by the designer, and is the identity matrix of order . Proof: Let us define the control error as
. Subtracting
to both sides of (7), adding and subtracting the term
in the right-hand side, and making some algebraic arrangements, it is obtained that
where
is the controller ideal fixed parameters of the controller, which are unknown. Substituting (8) in (12), defining the controller parameters error as
(which implies
as
is constant), and considering (9), the equations describing the evolution of the errors are
Let us propose the following Lyapunov candidate function, which is positive definite
Taking the time derivative of (14), it is obtained that
. Substituting into this last expression the derivatives of the controlled variable error
from (13) and the controller parameters error
(13), considering that
,
due to
is a diagonal matrix, that
equals the
multiplied by
, and grouping terms, we obtain
. Now, considering the two vectors property where
to write into the trace the second term
and rearranging, we have
. Canceling terms allows obtaining
As can be seen in (15), the first-time derivative of the Lyapunov function (14) is negative semidefinite; thus, using Lapunov Theorem, it can be concluded that system (13) is stable.
- (a)
Let us now prove that control error e converges to zero.
Integrating Equation (15) in the interval
it is obtained that
Since the system is stable, are all bounded (), and from (14) it can be concluded that is always bounded. Thus, the left-hand side of (16) is always bounded, which implies from the right-hand side of (16) that .
Since and the reference output is assumed to be bounded, it can be concluded from the errors expressions that . Thus, since is assumed a bounded function for a bounded , from (9) , and consequently, from (13), it can be concluded that .
Thus, since
and
, using Barbalat’s Lemma [
18] it can be concluded that
and this concludes the proof. The controller parameters error
is stable, and the adaptive controller parameters
not necessarily tend to the controller ideal parameters
. □
The normalized FG-APBC for the IM is described in
Figure 3, where summarizing,
,
, with
,
with
,
due to
, and
. The value
is chosen, with
the motor inertia taken from the IM datasheet. The value
came from the widely used criterion considering the inner current loop 10 as times faster than the outer mechanical loop and our proposal for the normalized FG-APBC of considering a controller time as a constant of a fifth the inner time constant of the plant.
In order to verify the achievement of the proposal goal, comparative experimental results considering real-time simulations are described in the next section.
4. Experimental Comparative Results and Discussion
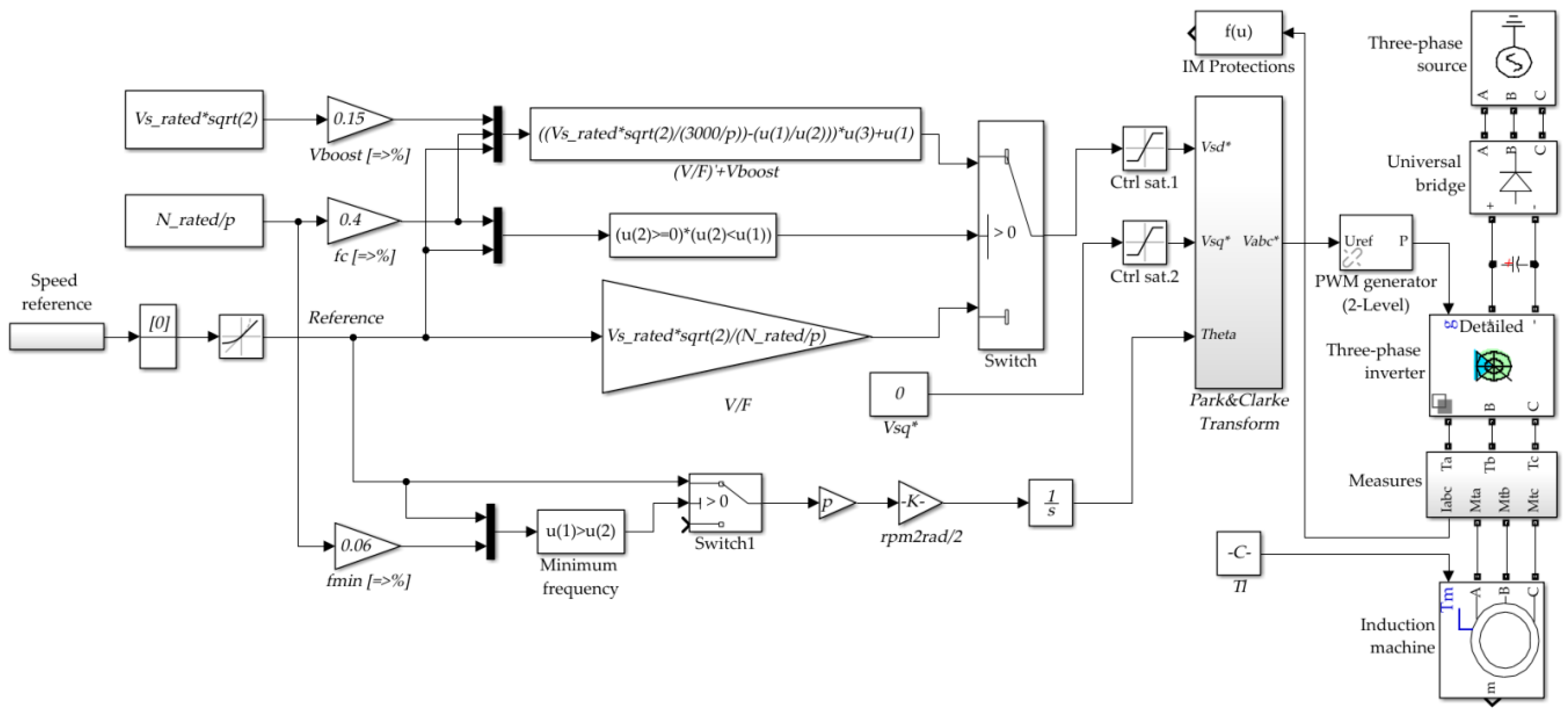
The schemes from
Figure 1 (basic SCS) and
Figure 2 (proposed HST-SCS) were applied to an IM of 200 HP. These were programmed in Simulink version 8.9 of Matlab R2017a (9.2.0.538062) for Win64. Later, they were downloaded into a real-time simulator controller 4510 v2 from OPAL-RT and run. The field-programmable gate array (FPGA) of the OPAL was used to creates a hardware implementation of portions of the software application.
The real-time simulations started at 0 s and stopped at 35 s using a sampling time of 10 μs. In both cases, a constant speed setpoint was applied equal to the nominal speed value and a ramp of 50 rpm/s.
The inverter trip unit was running at the FPGA of the controller and works at 2 kHz. The motor data plate is 149.2 kW, 460 V, 60 Hz, 1755 rpm (183.8 rad/s), fp = 0.85, η = 86.6%, Tnom = 812 Nm, and the motor inertia taken from its datasheet is 3.1 Kgm2. The parameters of the motor-load set (considered unknown) are p = 4, Lm = 10.46 mH, Ls = Lr = 10.7627 mH, Rs = 14.85 mΩ, Rr = 9.295 mΩ, J = 6.2 Kgm2, and B = 0.08 Nms.
4.1. Basic SCS
In this case, the following SCS configuration parameters were used:
,
,
,
, and
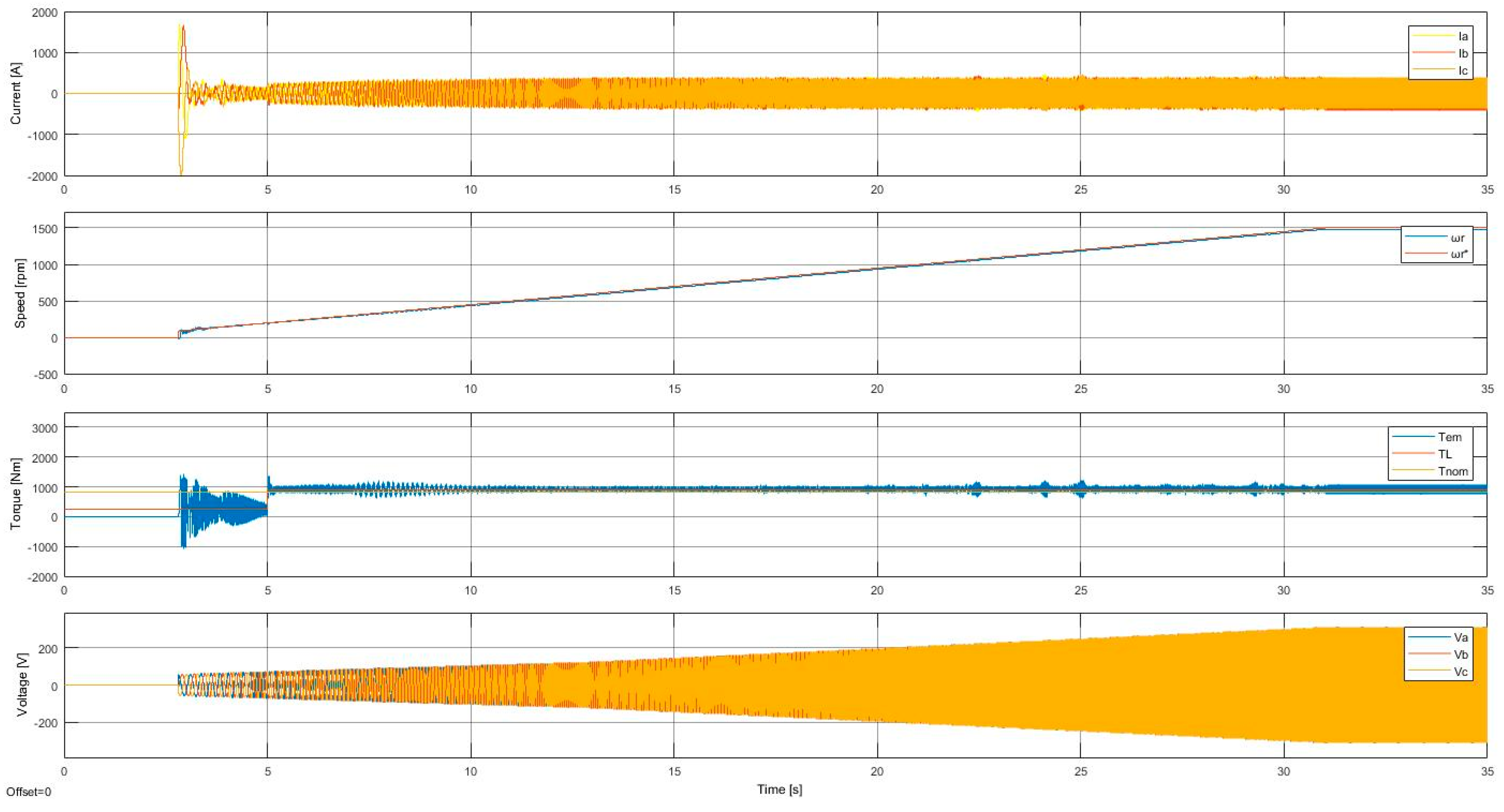
. The experimental results for a starting torque
Tl = 30%
Tnom, increasing to 110%
Tnom at 5 s, are shown in
Figure 4.
Figure 4 shows the results of the basic SCS, starting with 30% of the nominal torque. The slope of the voltage amplitude decreased at a time between 15 and 20 s at 40% of the required speed. A torque ripple is shown at low speeds. The real rotor speed followed the required rotor with an accuracy of 2.2%.
There is a smooth change when switching the voltage in Equation (1) at the frequency . Neither the rotor speed, the stator current, nor the torque is affected by this change of the control method.
4.2. Proposed Adaptive HST-SCS
The SCS configuration parameters in this case were the same used by the basic SCS (
,
,
,
, and
), and additionally,
,
,
, and
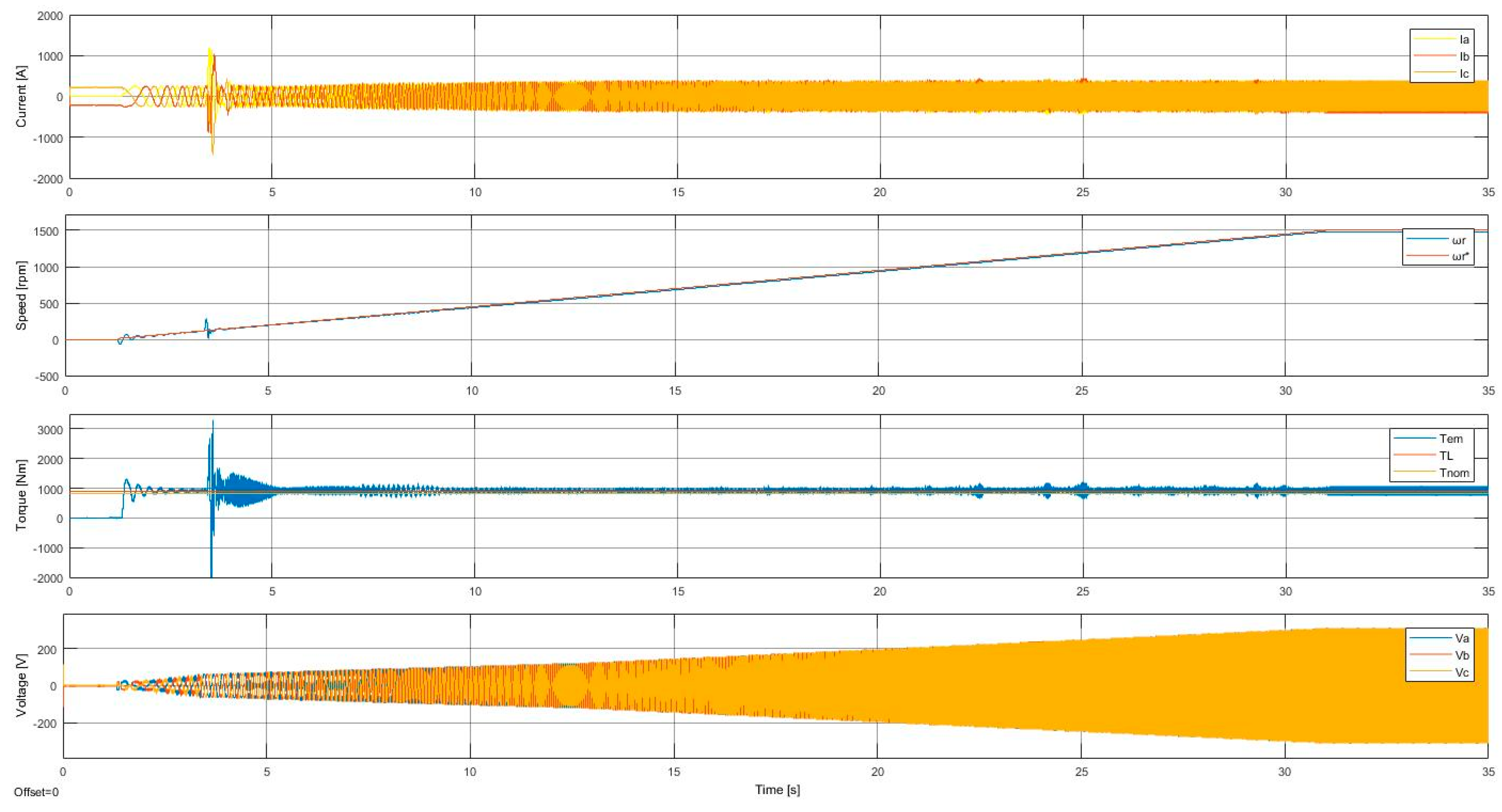
. The experimental results are shown in
Figure 5.
Results from
Figure 5 show the achievement of the proposed goal after starting with 110% of the nominal torque. Conversely to the basic SCS results from
Figure 4, the HST-SCS is characterized by having the motor magnetized from zero speed consuming the rated stator current. It has a higher voltage slope after starting. It also consumes a starting stator current smaller than the basic SCS loaded with 30% of the nominal torque (see
Figure 4). After
, the HST-SCS behaves like the basic SCS: the slope of the voltage amplitude decreased at a time between 15 to 20 s at 40% of the required speed; a torque ripple is also shown at low speeds, and the real rotor speed followed the required rotor with an accurate of 2.2%.
Distinctly from the basic SCS (
Figure 4), the HST-SCS (
Figure 5) shows an extra change in the slope of the voltage amplitude. It is higher at a time between 3 and 4 s at 8% of the required speed. At this point, the control strategy changes from the HST-SCS to the SCS, showing higher torque amplitude in correspondence to the higher torque load. The exact switching point fixed at 8% could change, looking for a smoother strategy change.
When switching between its control methods, the rotor speed, the stator current, and the torque shown in
Figure 5 are affected in the HST-SCS. In particular, there is a torque ripple caused by the algorithm switching which is higher than for the basic SCS (
Figure 4). This is a disadvantage of the HST-SCS over the basic SCS that should be improved in future work.
5. Conclusions
An HST-SCS for IM was proposed based on the basic SCS. The proposed SCS considers an adaptive current controller based on a direct APBC scheme using a normalized FG to fine-tune the adaptive controller parameter that works without the knowledge of the motor-load parameters. The main advantages of the HST-SCS include the capability to move higher starting-torque loads, together with a simple and cost-effective implementation without needing a rotor speed sensor or estimator, variable observers, or parameter estimators. The basic SCS for IM and the HST-SCS were applied to an IM of 200 HP and tested using the real-time simulator controller 4510 v2 from OPAL-RT. The HST-SCS started with 110% of the nominal torque, consuming less stator current than the basic SCS with a load torque of 30% of the nominal torque. Besides the rated voltage per phase needed by the basic SCS, the proposed HST-SCS needs the rated current per phase and motor inertia taken from the IM datasheet.
There is a torque ripple caused by the algorithm-switching of the HST-SCS, which is higher than for the basic SCS starting. This is a disadvantage of the HST-SCS over the basic SCS, which has a smooth change between its methods. Neither the rotor speed, the stator current, nor the torque is affected by this change of the control method in the basic SCS.
In future work, the proposed HST-SCS should be validated under a small scale test bench. In addition, using a motor of low rated power, the torque ripple magnitude, increased during the switching between methods, should be studied and decreased as much as possible.

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}