Control of a Modular Multilevel Matrix Converter for Unified Power Flow Controller Applications


 , ,
, ,  and
and 
Abstract
1. Introduction
- To the best of the authors’ knowledge, this is the first paper where the control strategies for an based UPFC are developed and experimentally validated.
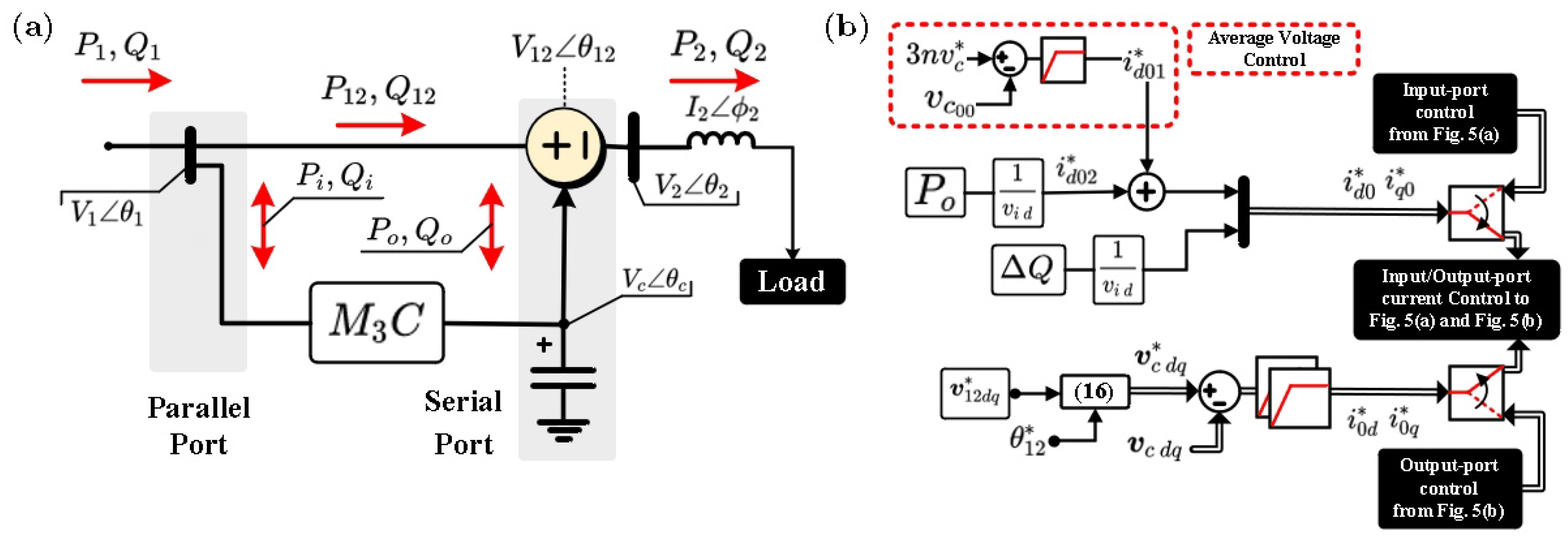
- In this work, the input port of the is regulated in grid-feeding mode, whereas the output port is regulated in grid-forming mode. Therefore, shunt and series control FACTS capabilities are enabled for the proposed based UPFC.
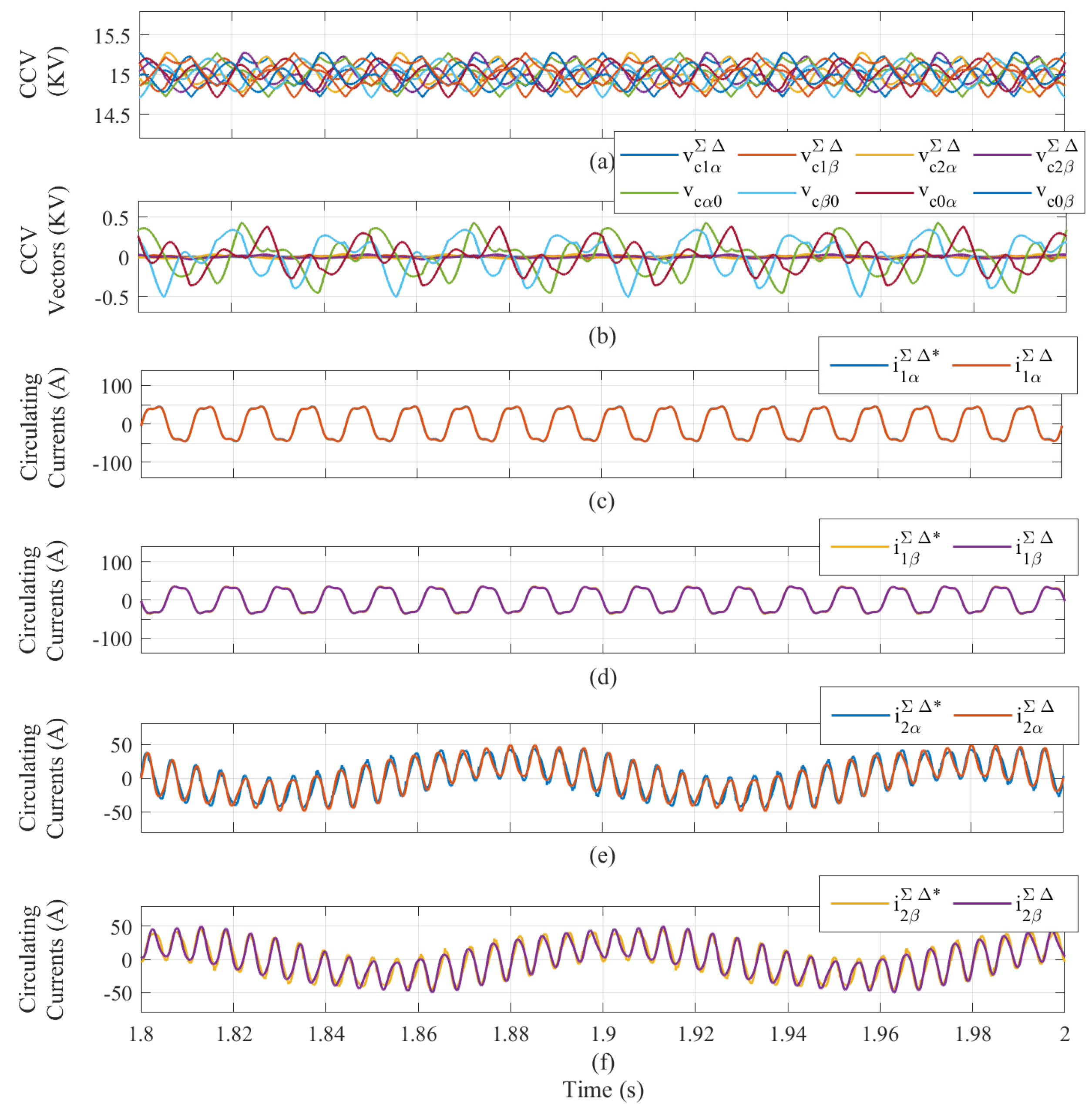
- The circulating current control is enhanced using proportional-resonant controllers implemented in the synchronous frame. This is different from the control systems previously published for applications (see [15,16,17,18,23,26]) where proportional controllers implemented in the stationary frame were utilized, which cannot ensure zero steady-state error.
2. Analysis of the
2.1. Voltage-Current Model of the
2.2. Power-CCV Model of the
- has a dominant frequency oscillation of .
- has a dominant frequency oscillation of .
- has a dominant frequency oscillation of .
- has a dominant frequency oscillation of .
3. Proposed Vector Control Strategy
3.1. Control of the Input-Output Ports
3.2. Control
3.2.1. CCV Control
3.2.2. Circulating Current Control
3.2.3. Single-Cell Control
4. UPFC Control System
4.1. Shunt Control FACT
4.2. Series Control FACT
5. Simulation Results
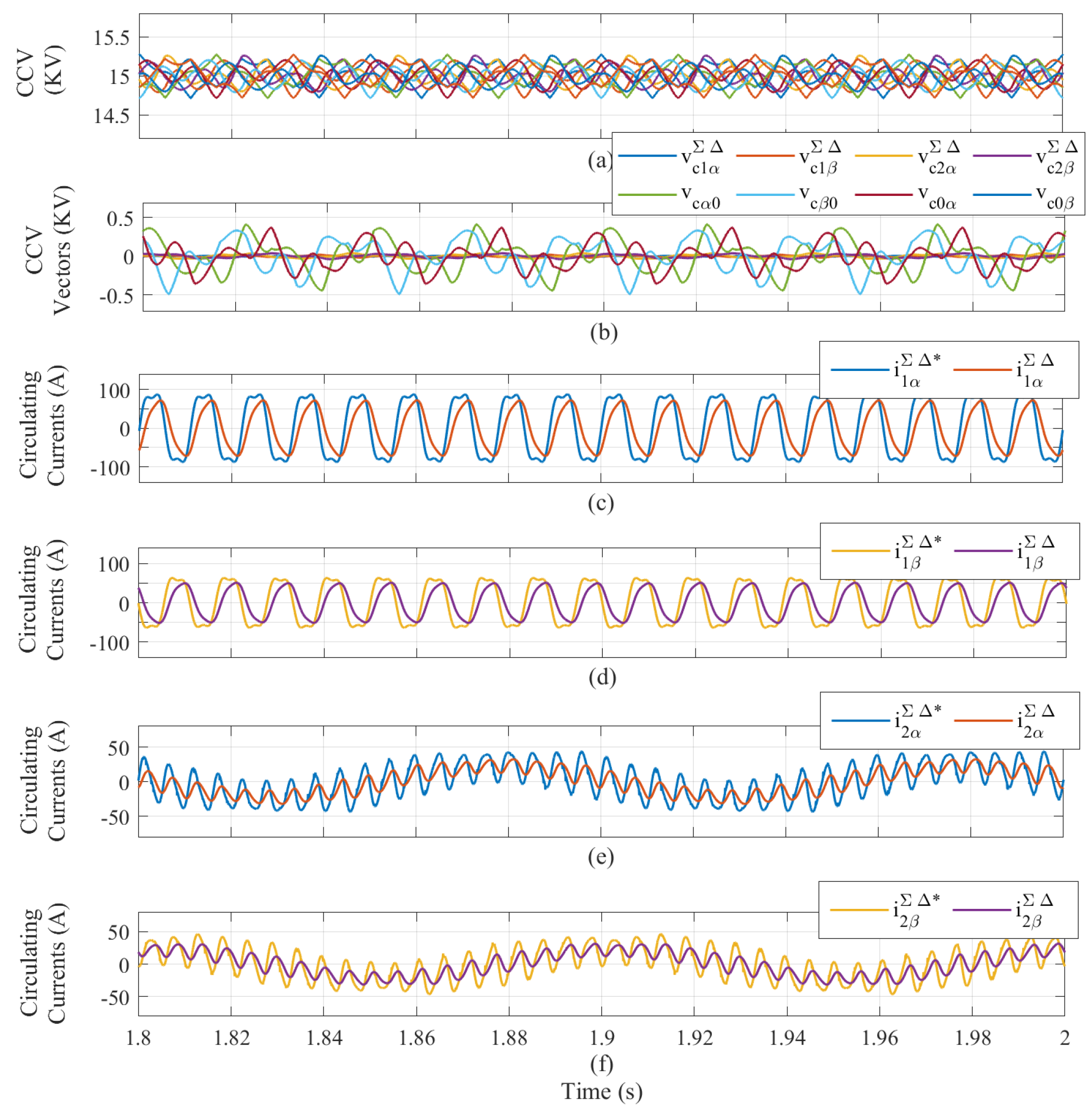
5.1. Test 2: Proportional Multi-Resonant Controller Performance
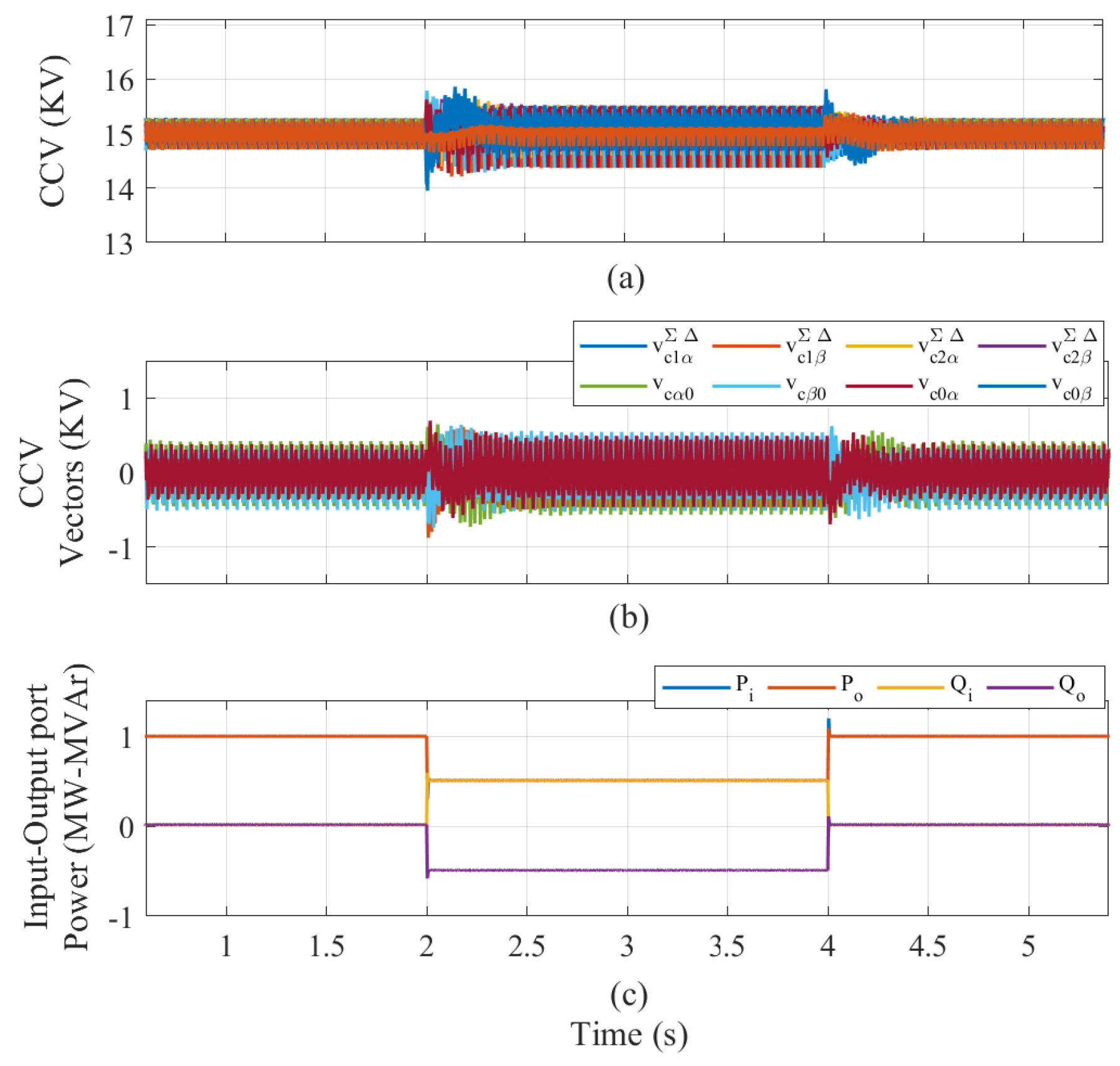
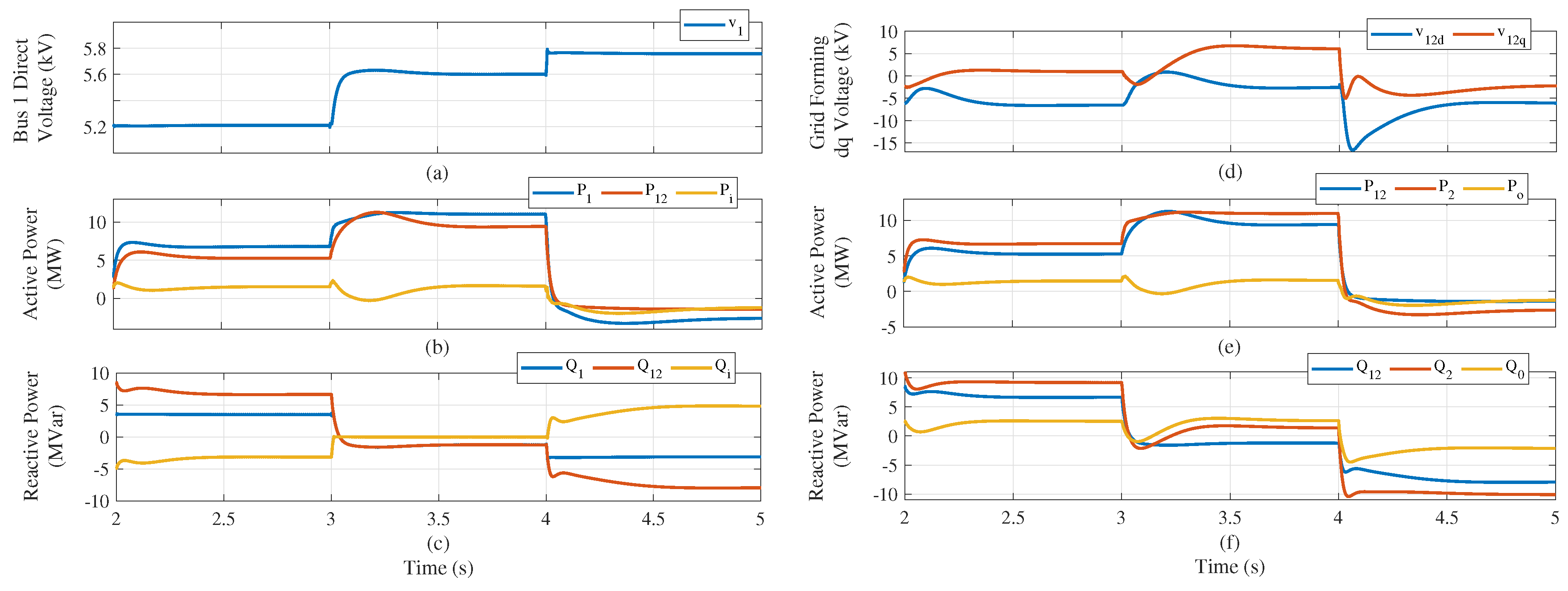
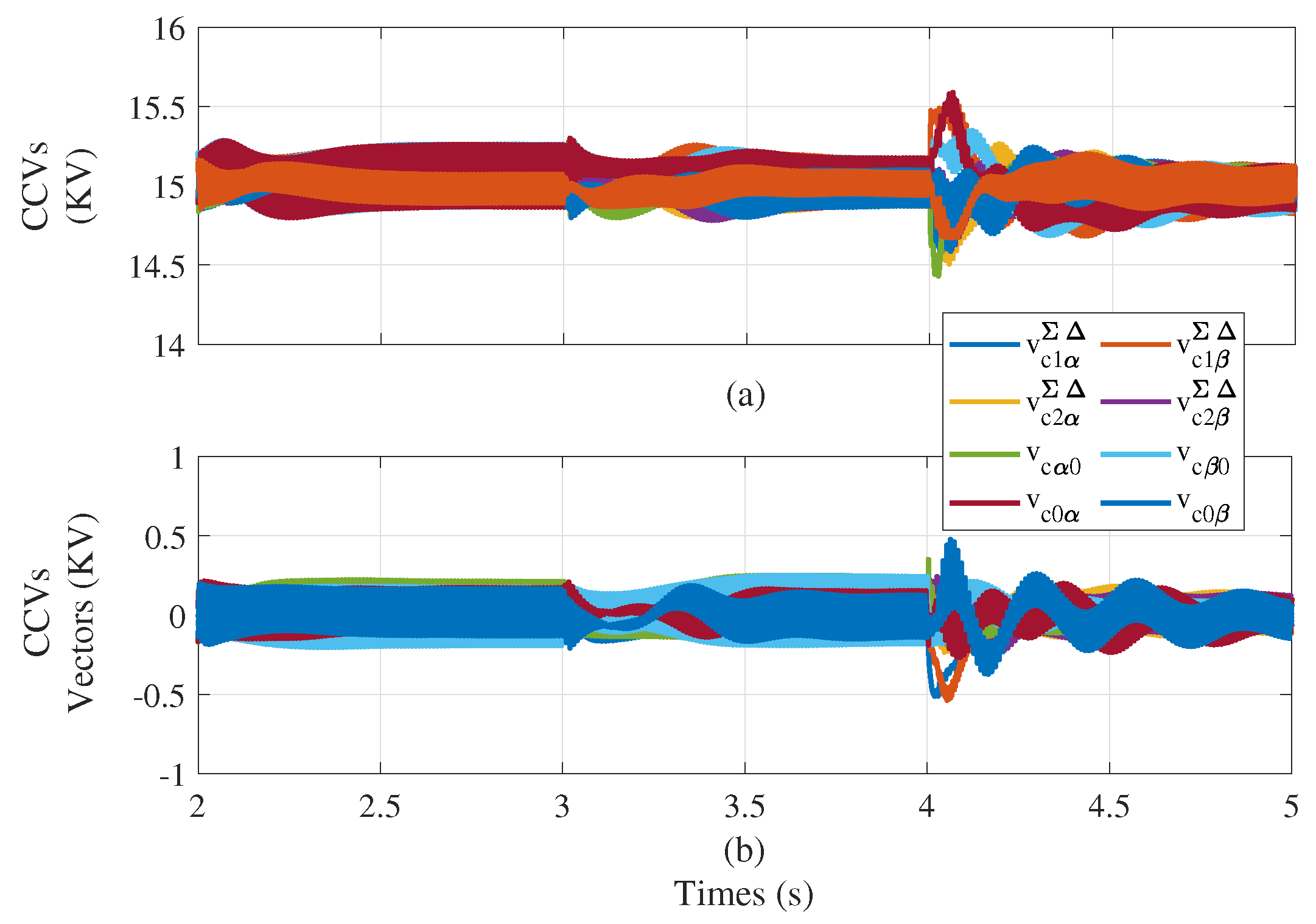
5.2. Test 3: UPFC Control
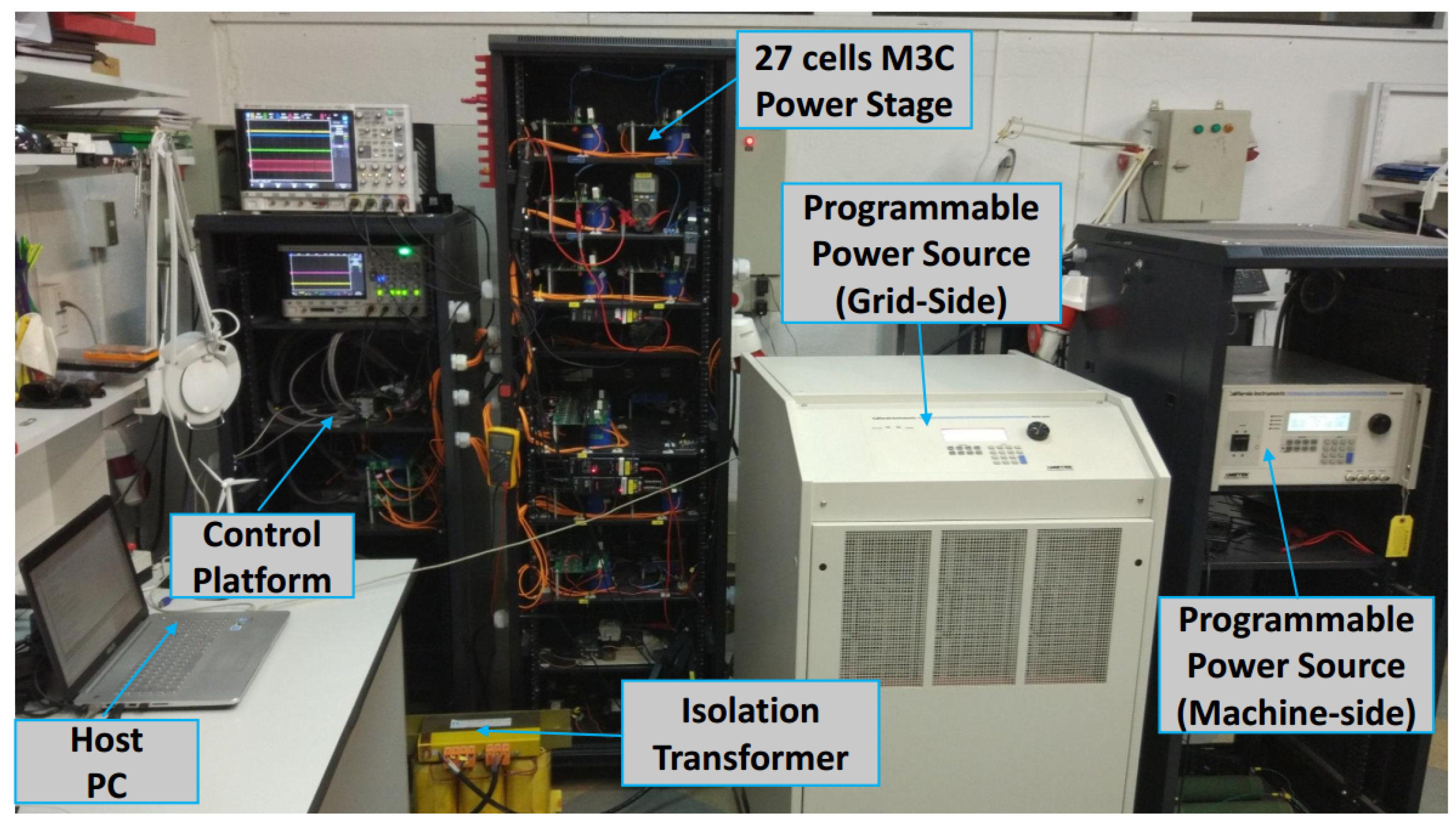
6. Experimental Results
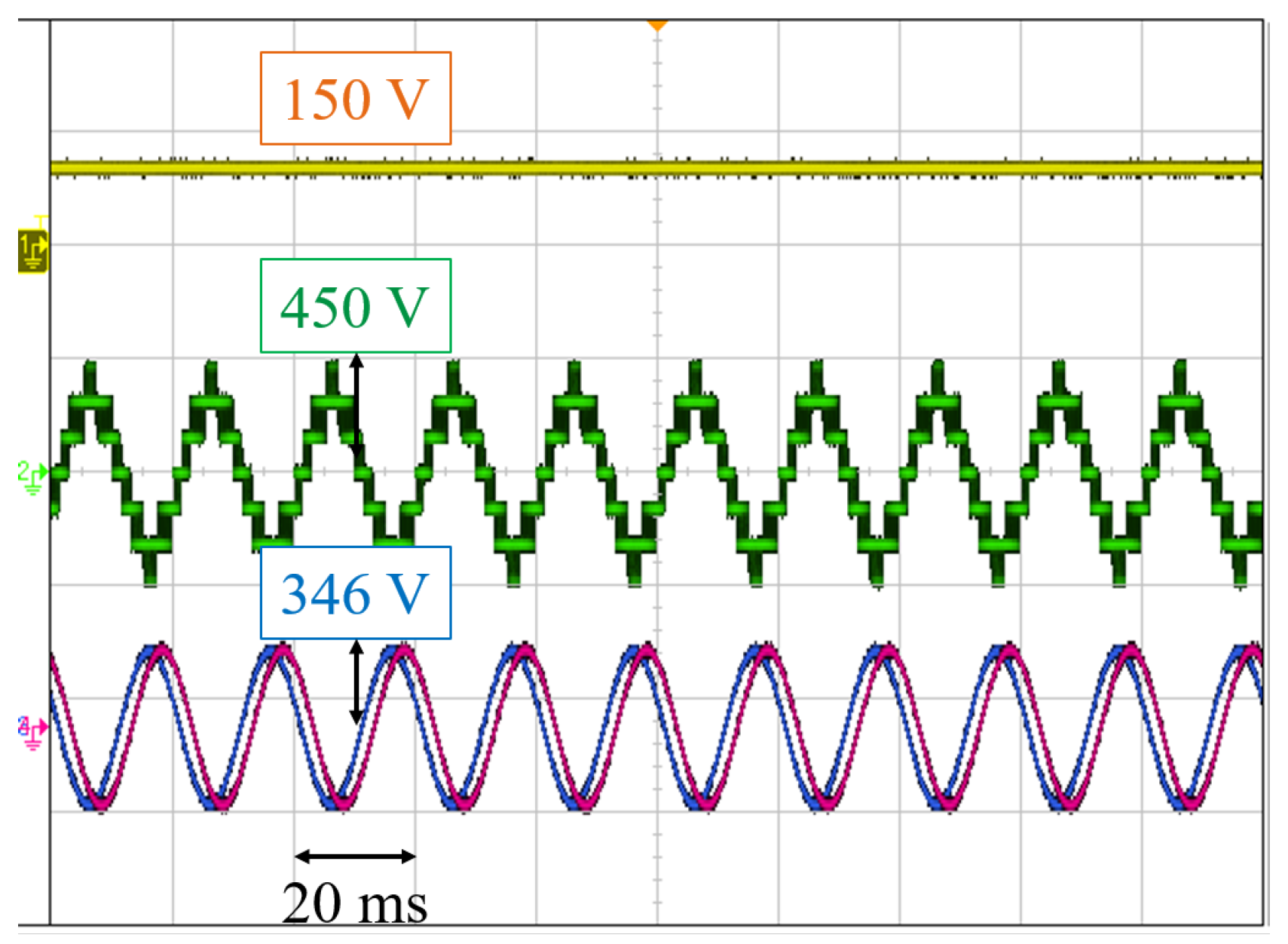
6.1. Test I: Steady-State Operation
6.2. Test II: Direct Power Control
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kotsampopoulos, P.; Georgilakis, P.; Lagos, D.T.; Kleftakis, V.; Hatziargyriou, N. Facts providing grid services: Applications and testing. Energies 2019, 12, 2554. [Google Scholar] [CrossRef]
- Hingorani, N.; Gyugyi, L. Understanding FACTS: Concepts and Technology of Flexible AC Transmission System, 1st ed.; Wiley-IEEE Press: New York, NY, USA, 2000. [Google Scholar]
- Zhang, X.P.; Handschin, E.; Yao, M. Multi-control functional static synchronous compensator (STATCOM) in power system steady-state operations. Electr. Power Syst. Res. 2004, 72, 269–278. [Google Scholar] [CrossRef]
- Sen, K.K. SSSC - Static Synchronous Series Compensator: Theory, modeling, and applications. IEEE Trans. Power Deliv. 1998, 13, 241–246. [Google Scholar] [CrossRef]
- Li, M.; Lin, Z.; Wu, W.; Lin, Y.; Jiang, P.; Hu, Z.; Ye, R.; Du, Y. Application of UPFC in Fujian 500 kV power grid. J. Eng. 2019, 2019, 2510–2513. [Google Scholar] [CrossRef]
- Kouro, S.; Rodriguez, J.; Wu, B.; Bernet, S.; Perez, M. Powering the future of industry: High-power adjustable speed drive topologies. IEEE Ind. Appl. Mag. 2012, 18, 26–39. [Google Scholar] [CrossRef]
- Akagi, H. Classification, terminology, and application of the modular multilevel cascade converter (MMCC). IEEE Trans. Power Electron. 2011, 26, 3119–3130. [Google Scholar] [CrossRef]
- Okazaki, Y.; Kawamura, W.; Hagiwara, M.; Akagi, H.; Ishida, T.; Tsukakoshi, M.; Nakamura, R. Experimental Comparisons Between Modular Multilevel DSCC Inverters and TSBC Converters for Medium-Voltage Motor Drives. IEEE Trans. Power Electron. 2017, 32, 1802–1817. [Google Scholar] [CrossRef]
- Marquardt, R. Modular Multilevel Converter: An universal concept for HVDC-Networks and extended DC-bus-applications. In Proceedings of the 2010 International Power Electronics Conference—ECCE Asia, IPEC 2010, Sapporo, Japan, 21–24 June 2010; pp. 502–507. [Google Scholar] [CrossRef]
- Allebrod, S.; Hamerski, R.; Marquardt, R. New transformerless, scalable modular multilevel converters for HVDC-transmission. In Proceedings of the PESC Record—IEEE Annual Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008; pp. 174–179. [Google Scholar] [CrossRef]
- Zhuo, G.; Jiang, D.; Lian, X. Modular multilevel converter for unified power flow controller application. In Proceedings of the 2012 Third International Conference on Digital Manufacturing & Automation, GuiLin, China, 31 July–2 August 2012; pp. 545–549. [Google Scholar] [CrossRef]
- Liu, J.; Xu, Z.; Xiao, L. Comprehensive power flow analyses and novel feedforward coordination control strategy for MMC-based UPFC. Energies 2019, 12, 824. [Google Scholar] [CrossRef]
- Li, P.; Wang, Y.; Feng, C.; Lin, J. Application of MMC-UPFC in the 500 kV power grid of Suzhou. J. Eng. 2017, 2017, 2514–2518. [Google Scholar] [CrossRef]
- Erickson, R.; Angkititrakul, S.; Almazeedi, K. A New Family of Multilevel Matrix Converters for Wind Power Applications: Final Report; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2006. [Google Scholar]
- Díaz, M.; Cárdenas, R.; Mauricio Espinoza, B.; Mora, A.; Rojas, F. A novel LVRT control strategy for modular multilevel matrix converter based high-power wind energy conversion systems. In Proceedings of the 2015 10th International Conference on Ecological Vehicles and Renewable Energies, EVER 2015, Monte Carlo, Monaco, 31 March–2 April 2015; pp. 1–11. [Google Scholar] [CrossRef]
- Diaz, M.; Rojas, F.; Donoso, F.; Cardenas, R.; Espinoza, M.; Mora, A.; Wheeler, P. Control of modular multilevel cascade converters for offshore wind energy generation and transmission. In Proceedings of the 2018 13th International Conference on Ecological Vehicles and Renewable Energies, EVER 2018, Monte-Carlo, Monaco, 10–12 April 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Diaz, M.; Cardenas, R.; Espinoza, M.; Rojas, F.; Mora, A.; Clare, J.C.; Wheeler, P. Control of Wind Energy Conversion Systems Based on the Modular Multilevel Matrix Converter. IEEE Trans. Ind. Electron. 2017, 64, 8799–8810. [Google Scholar] [CrossRef]
- Fan, B.; Wang, K.; Wheeler, P.; Gu, C.; Li, Y. An Optimal Full Frequency Control Strategy for the Modular Multilevel Matrix Converter Based on Predictive Control. IEEE Trans. Power Electron. 2018, 33, 6608–6621. [Google Scholar] [CrossRef]
- Diaz, M.; Espinosa, M.; Rojas, F.; Wheeler, P.; Cardenas, R. Vector control strategies to enable equal frequency operation of the modular multilevel matrix converter. J. Eng. 2019, 2019, 4214–4219. [Google Scholar] [CrossRef]
- Diaz, M.; Cardenas, R.; Espinoza, M.; Hackl, C.M.; Rojas, F.; Clare, J.C.; Wheeler, P. Vector control of a modular multilevel matrix converter operating over the full output-frequency range. IEEE Trans. Ind. Electron. 2019, 66, 5102–5114. [Google Scholar] [CrossRef]
- Kammerer, F.; Kolb, J.; Braun, M. Fully decoupled current control and energy balancing of the Modular Multilevel Matrix Converter. In Proceedings of the 2012 15th International Power Electronics and Motion Control Conference (EPE/PEMC), Novi Sad, Serbia, 4–6 September 2012; pp. LS2a.3:1–LS2a.3:8. [Google Scholar]
- Kawamura, W.; Hagiwara, M.; Akagi, H. Experimental verification of a modular multilevel cascade converter based on triple-star bridge-cells (MMCC-TSBC) for motor drives. In Proceedings of the 2013 1st International Future Energy Electronics Conference (IFEEC), Tainan, Taiwan, 3–6 November 2014; Volume 50, pp. 454–459. [Google Scholar] [CrossRef]
- Kammerer, F.; Gommeringer, M.; Kolb, J.; Braun, M. Energy balancing of the Modular Multilevel Matrix Converter based on a new transformed arm power analysis. In Proceedings of the 2014 16th European Conference on Power Electronics and Applications, EPE-ECCE Europe 2014, Lappeenranta, Finland, 26–28 August 2014. [Google Scholar] [CrossRef]
- Xu, Q.; Ma, F.; Luo, A.; He, Z.; Xiao, H. Analysis and Control of M3C-Based UPQC for Power Quality Improvement in Medium/High-Voltage Power Grid. IEEE Trans. Power Electron. 2016, 31, 8182–8194. [Google Scholar] [CrossRef]
- Monteiro, J.; Pinto, S.; Martin, A.D.; Silva, J.F. A new real time Lyapunov based controller for power quality improvement in Unified Power Flow Controllers using Direct Matrix Converters. Energies 2017, 10, 779. [Google Scholar] [CrossRef]
- Kawamura, W.; Hagiwara, M.; Akagi, H. A broad range of frequency control for the modular multilevel cascade converter based on triple-star bridge-cells (MMCC-TSBC). In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, ECCE 2013, Denver, CO, USA, 15–19 September 2013; pp. 4014–4021. [Google Scholar] [CrossRef]
- Cárdenas, R.; Peña, R. Sensorless vector control of induction machines for variable-speed wind energy applications. IEEE Trans. Energy Convers. 2004, 19, 196–205. [Google Scholar] [CrossRef]
- Espinoza, M.; Cárdenas, R.; Díaz, M.; Clare, J.C. An Enhanced dq-Based Vector Control System for Modular Multilevel Converters Feeding Variable-Speed Drives. IEEE Trans. Ind. Electron. 2017, 64, 2620–2630. [Google Scholar] [CrossRef]
- Espinoza, M.; Espina, E.; Diaz, M.; Mora, A.; Cardenas, R. Improved control strategy of the modular multilevel converter for high power drive applications in low frequency operation. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 5–9 September 2016; pp. 1–10. [Google Scholar] [CrossRef]
- Fujita, H.; Watanabe, Y.; Akagi, H. Control and analysis of a unified power flow controller. IEEE Annu. Power Electron. 1998, 1, 805–811. [Google Scholar] [CrossRef]
- Rem, B.A.; Keri, A.; Mehraban, A.S.; Schauder, C.; Stacey, E.; Kovalsky, L.; Gyugyi, L. Aep unified power flow controller performance. IEEE Trans. Power Deliv. 1999, 14, 1374–1381. [Google Scholar]
- Zhu, P.; Liu, L.; Liu, X.; Kang, Y.; Chen, J.; Member, S. Analysis and Comparison of two Control Strategies for UPFC. In Proceedings of the 2005 IEEE/PES Transmission & Distribution Conference & Exposition: Asia and Pacific, Dalian, China, 18 August 2005; pp. 1–7. [Google Scholar]
- Chen, J.; Tao, J.; Wang, C.; Wei, P.; Liu, J.; Li, Q.; Zhou, Q. Control strategy of UPFC based on power transfer distribution factor. J. Eng. 2019, 2019, 1897–1899. [Google Scholar] [CrossRef]
- Zhang, J.; Hu, Z.; Cui, D.; Zhang, H. Research of MMC-UPFC Control Strategy. In Proceedings of the 2019 IEEE PES Innovative Smart Grid Technologies Asia, ISGT 2019, Chengdu, China, 21–24 May 2019; pp. 2217–2222. [Google Scholar] [CrossRef]
- Fujita, H.; Tominaga, S.; Akagi, H. Analysis and design of a DC voltage-controlled static var compensator using quad-series voltage-source inverters. IEEE Trans. Ind. Appl. 1996, 32, 970–978. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameter | Value |
|---|---|
| Nominal power | 10 MW |
| Cells per branch | 5 |
| Input port voltage/frequency | 5.5 kV/50 Hz |
| Output port voltage/frequency | 5.39 kV/20–60 Hz |
| Cluster inductor | 1.3 |
| Single-cell C | 7000 uF |
| Single-cell capacitor voltage | 3 kV |
| Common-mode voltage magnitude | 2 kV |
| UCC [35] | 141.75 ms |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duran, A.; Ibaceta, E.; Diaz, M.; Rojas, F.; Cardenas, R.; Chavez, H. Control of a Modular Multilevel Matrix Converter for Unified Power Flow Controller Applications. Energies 2020, 13, 953. https://doi.org/10.3390/en13040953
Duran A, Ibaceta E, Diaz M, Rojas F, Cardenas R, Chavez H. Control of a Modular Multilevel Matrix Converter for Unified Power Flow Controller Applications. Energies. 2020; 13(4):953. https://doi.org/10.3390/en13040953
Chicago/Turabian StyleDuran, Alberto, Efrain Ibaceta, Matias Diaz, Felix Rojas, Roberto Cardenas, and Hector Chavez. 2020. "Control of a Modular Multilevel Matrix Converter for Unified Power Flow Controller Applications" Energies 13, no. 4: 953. https://doi.org/10.3390/en13040953
APA StyleDuran, A., Ibaceta, E., Diaz, M., Rojas, F., Cardenas, R., & Chavez, H. (2020). Control of a Modular Multilevel Matrix Converter for Unified Power Flow Controller Applications. Energies, 13(4), 953. https://doi.org/10.3390/en13040953