Research on the Starting Acceleration Characteristics of a New Mechanical–Electric–Hydraulic Power Coupling Electric Vehicle



Abstract
1. Introduction
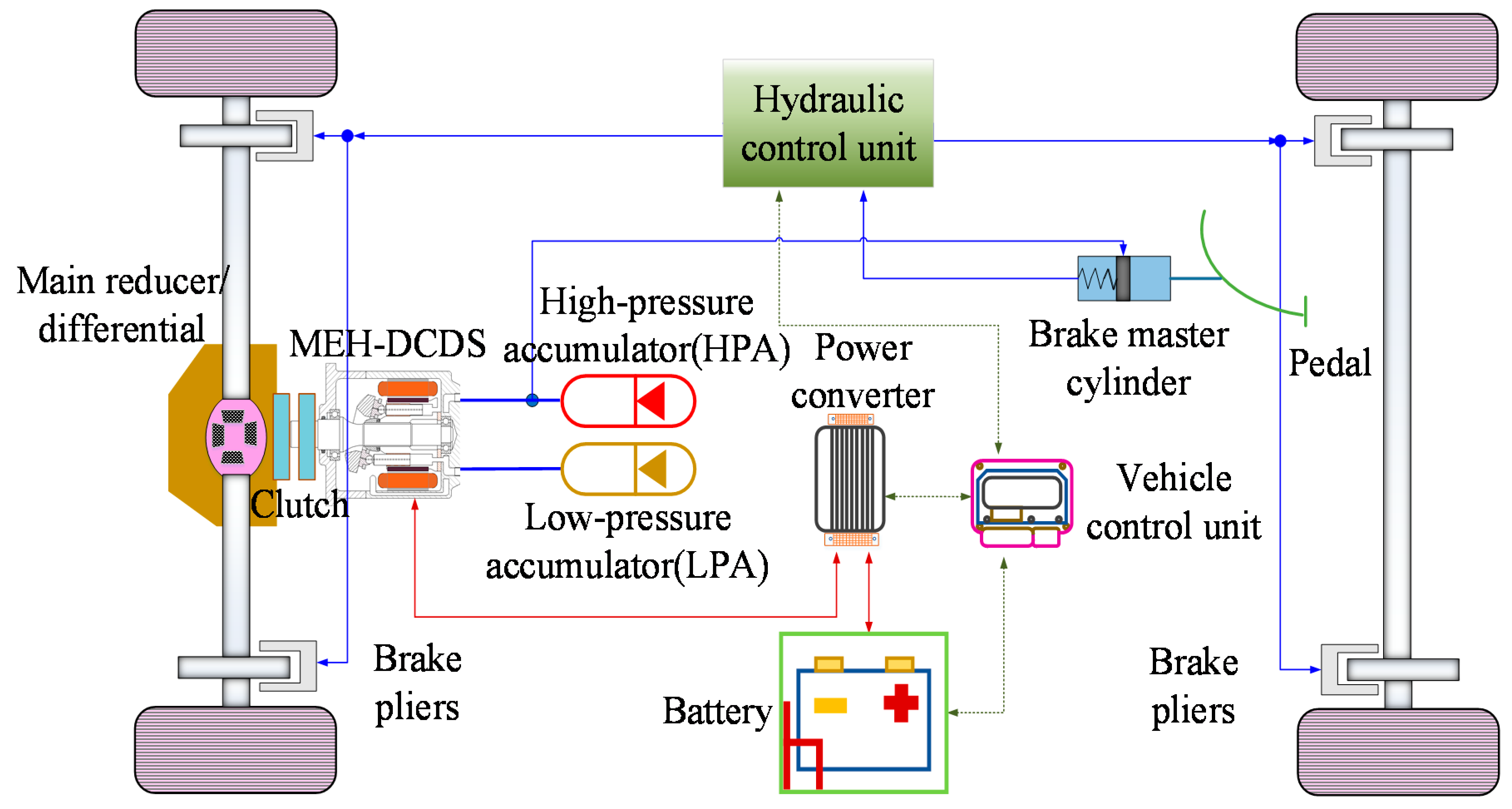
2. The Working Principle of the MEH-DCDS
- (1)
- The MEH-DCDS replaces the drive motor, transmission, and auxiliary drive system of traditional electric commercial vehicles. It optimizes the structure of the transmission system. Various power conversions are optimally matched through structural parameters within the system, which improves the transmission efficiency and makes the entire power transmission system more efficient. It also has a self-cooling function and compact structure.
- (2)
- Because of the high power density, hydraulic power can quickly start the car and double the car’s grade ability. It substantially improves the dynamics of the vehicle and greatly reduces the peak power of the electric power; when the MEH-DCDS brakes, hydraulic regenerative braking, electric regenerative braking, and friction braking (ABS braking) work together. This design decreases the braking distance and results in a more stable recovery of hydraulic power (over 70%).
- (3)
- The MEH-DCDS reduces the current impact caused by changes in vehicle load and the damage to the battery and electronic control system caused by the current impact. It reduces the utilization rate of the friction brake system, greatly improves the service life and reliability, and substantially increases the driving range.
3. Mathematical Modeling of the MEH-DCDS
3.1. Hydraulic Power
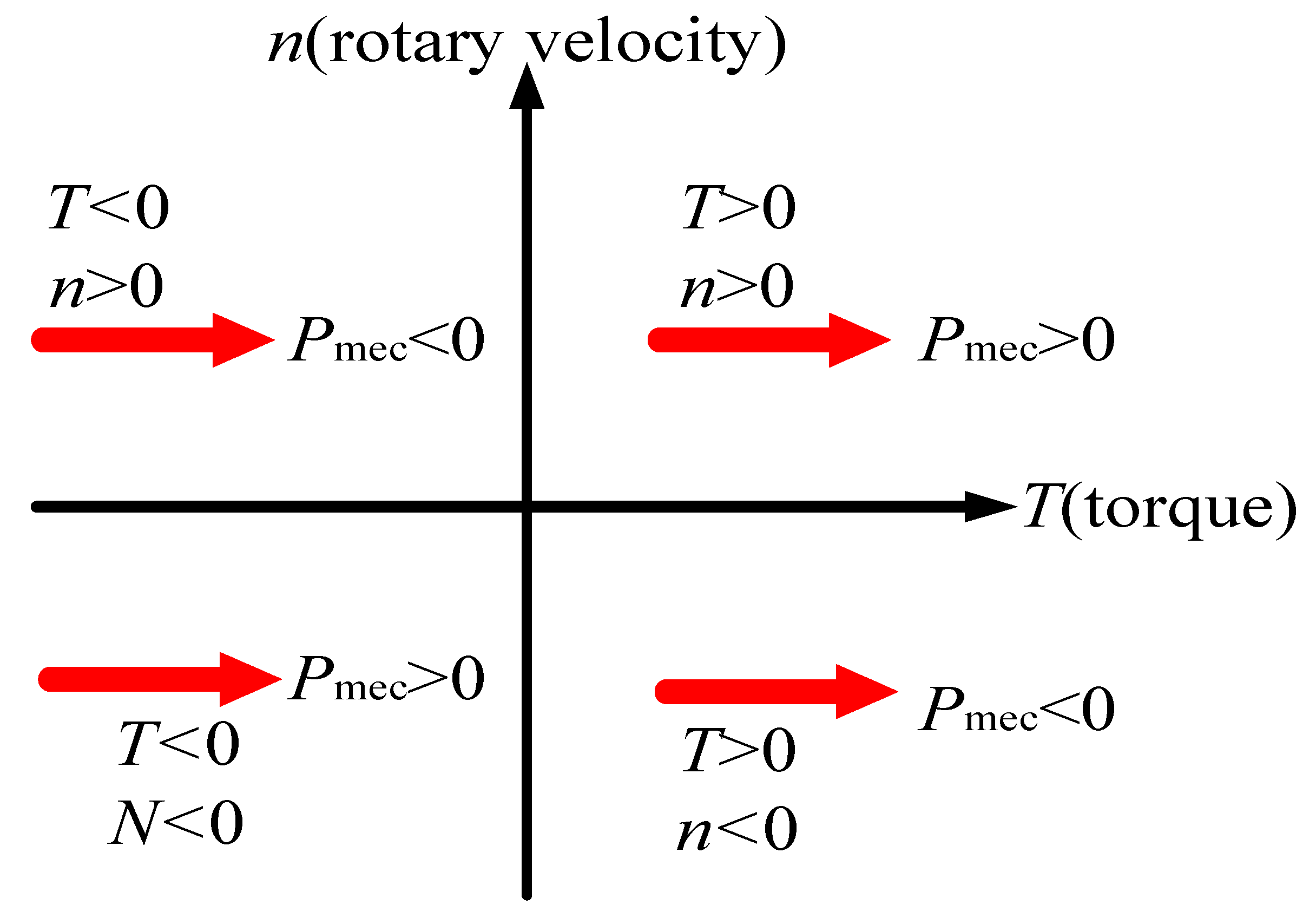
3.2. Electric Power
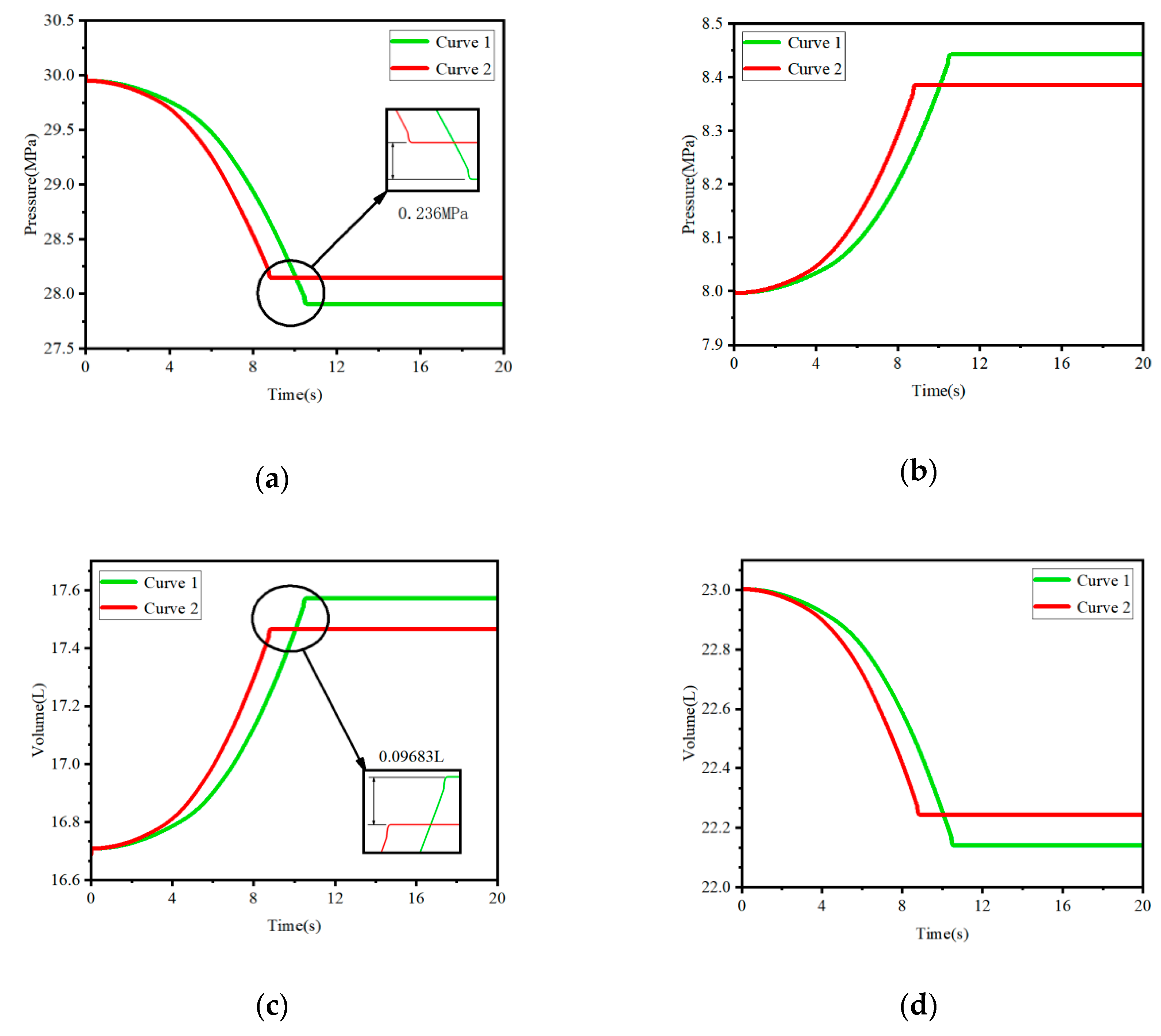
3.3. Hydraulic Accumulator
- (1)
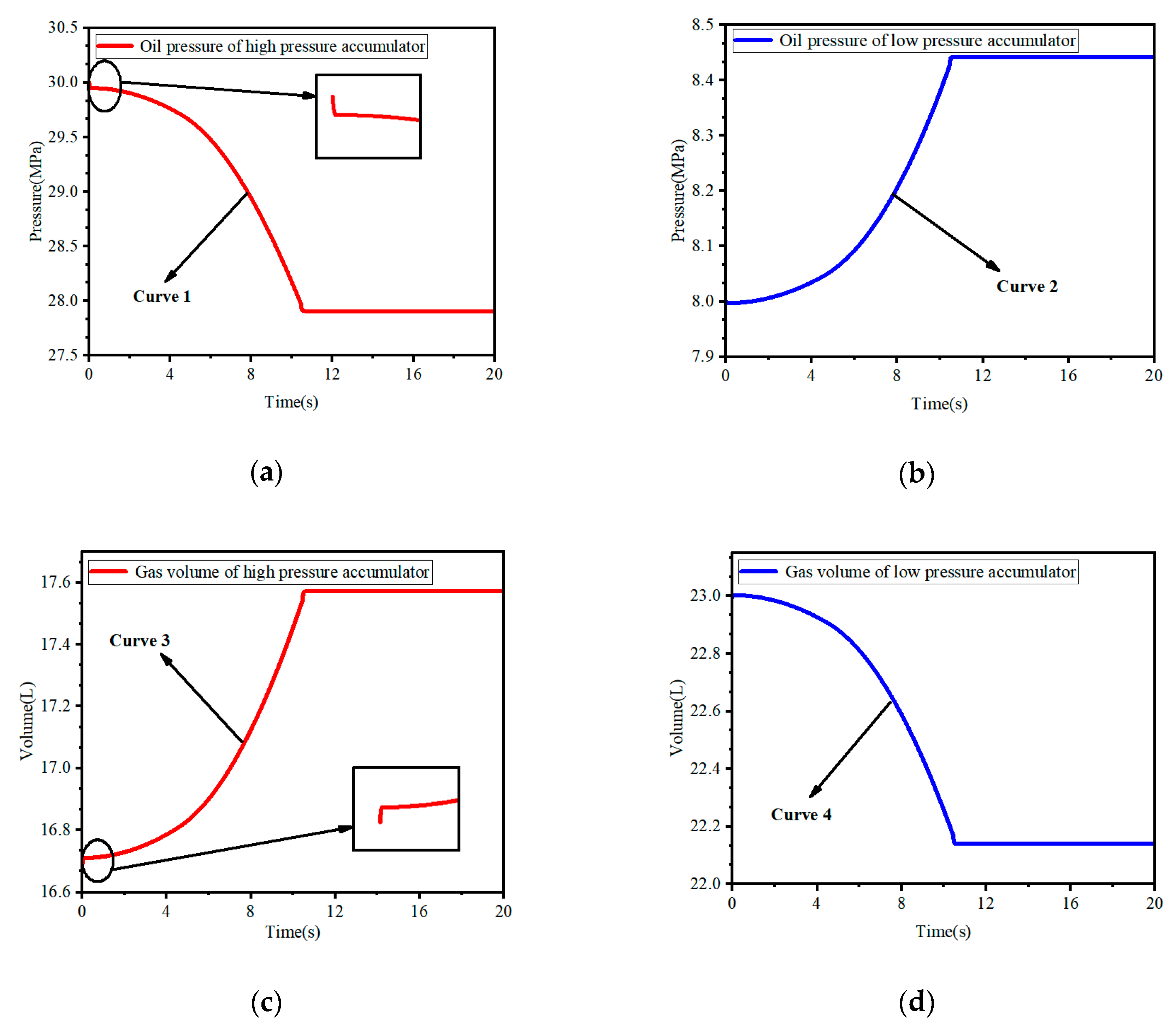
- If the energy of the accumulator is sufficient, the gas pressure of the accumulator is at the maximum, and the volume is at the minimum, hence:where Pgas is the gas pressure; Pmax is the maximum pressure; Vgas is the gas volume; and V0 is the accumulator volume.
- (2)
- If the accumulator has been completely discharged, the gas pressure of the accumulator is at the pre-charge value, and the volume is at the maximum, hence:
- (3)
- If the accumulator is neither fully discharged nor fully charged, the air pressure is identical to the hydraulic pressure:where Pout is the output pressure of the accumulator.
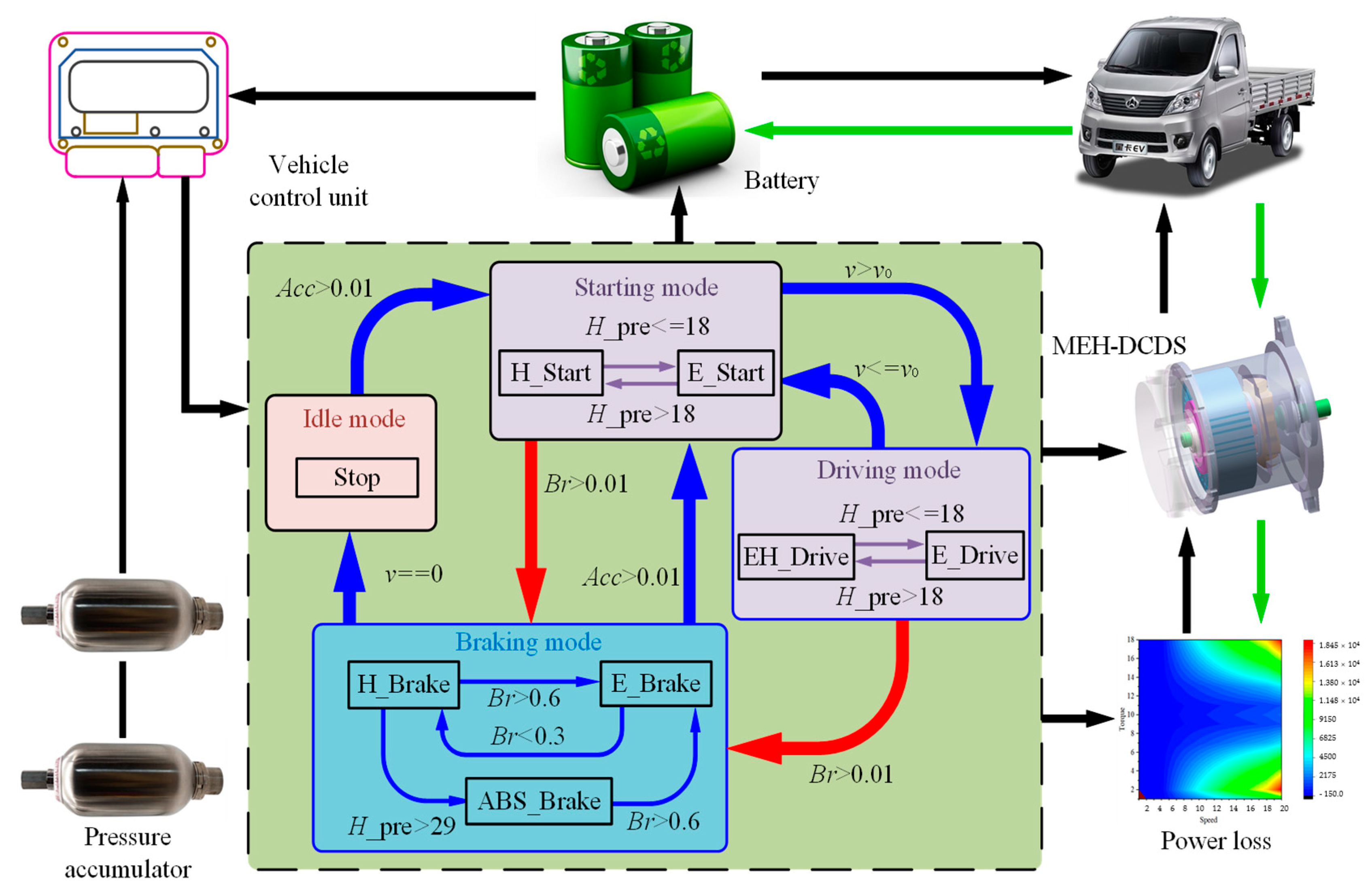
4. Analysis of the Working Mode and Energy Management Strategies
- (1)
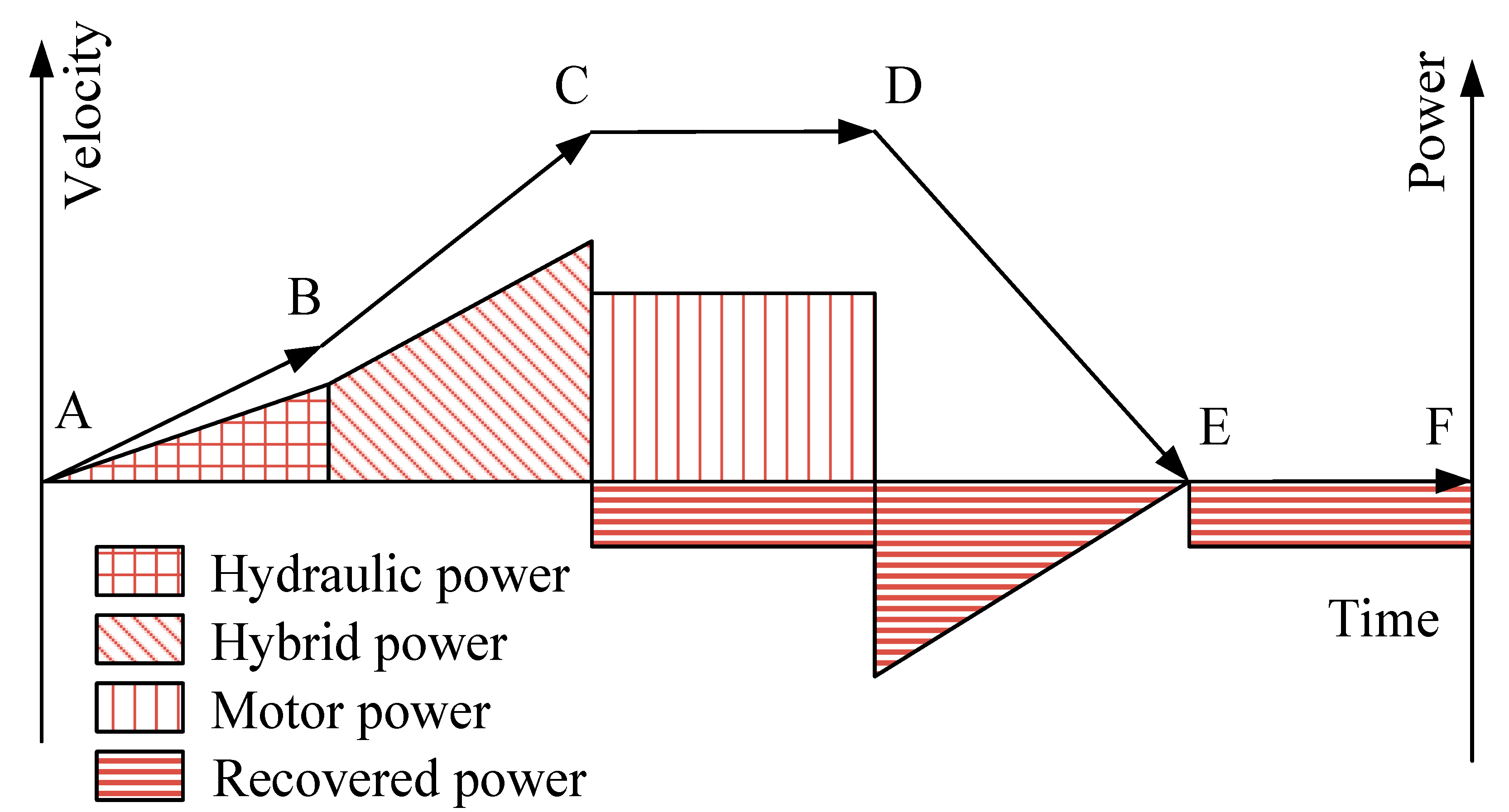
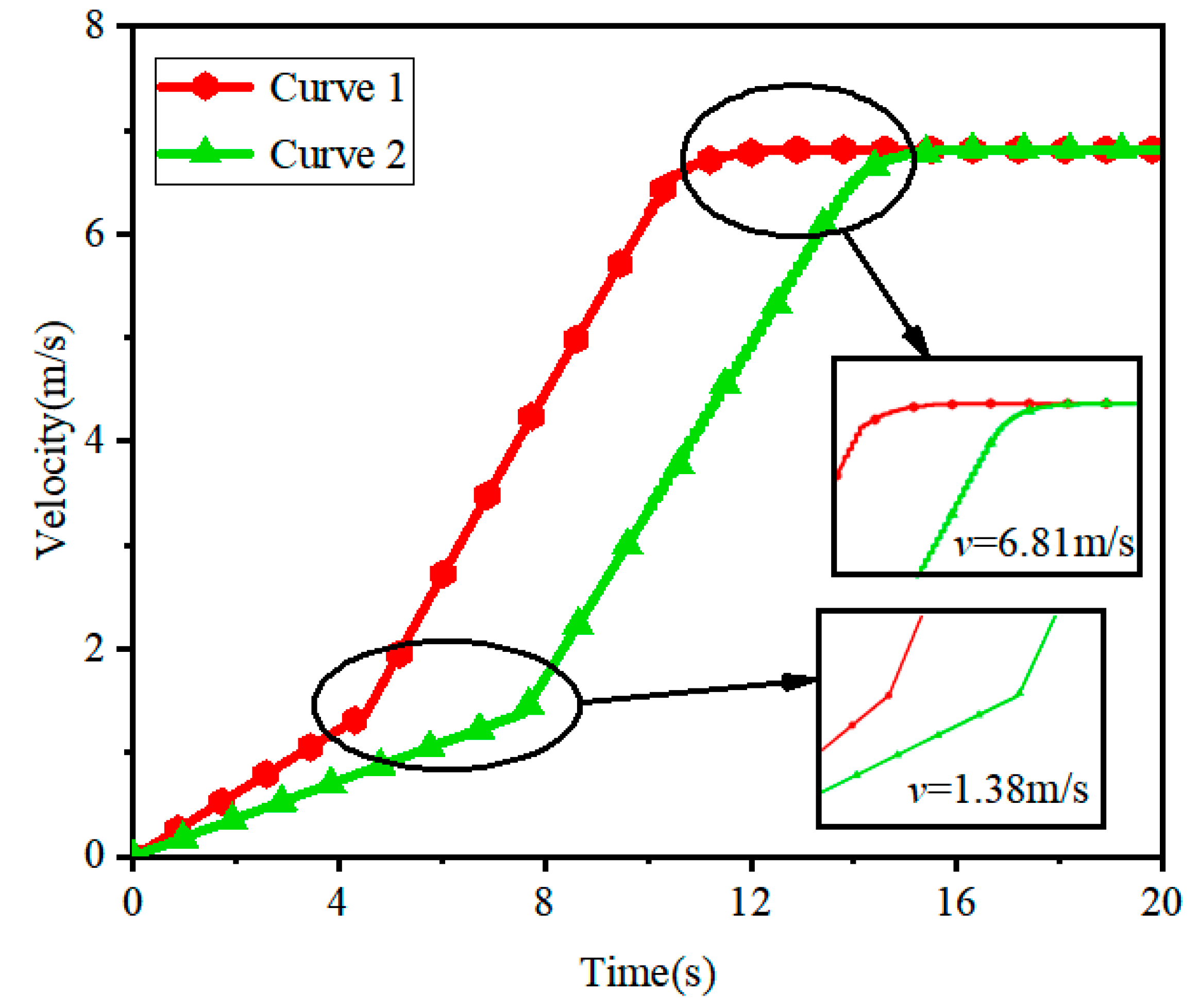
- Starting mode: As shown in section AB, the starting torque of the vehicle is greater during starting. The required peak torque makes the battery pack in a high current discharge state, which has a greater effect on the battery SOC. Therefore, when the vehicle begins to accelerate, only the hydraulic system drives the vehicle. When the pressure of the high-pressure accumulator in the hydraulic system is greater than the pressure of the low-pressure accumulator, the secondary element works in the motor state. All the solenoid valve switches are turned on. At this time, the hydraulic oil in the high-pressure accumulator flows to the low-pressure accumulator. The oil drives the hydraulic motor to rotate and converts the hydraulic energy stored in the hydraulic accumulator into mechanical energy. When the pressure is lower than the minimum working pressure of the accumulator, the hydraulic accumulator cannot release the hydraulic oil. At this time, the battery pack drives the electric motor/generator to charge the hydraulic accumulator.
- (2)
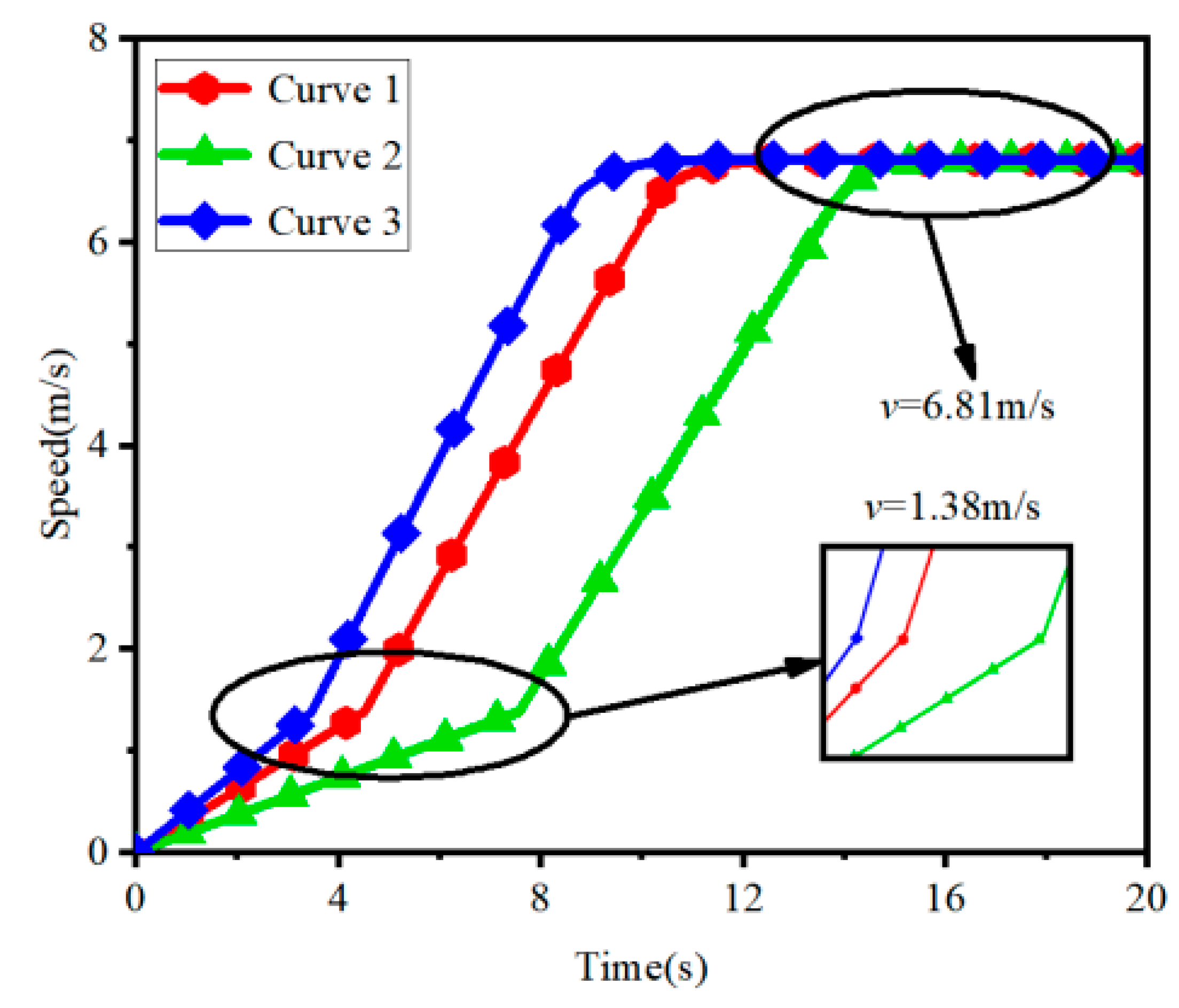
- Acceleration/climbing mode: As shown in section BC, the torque required for the vehicle to climb or accelerate must be sufficiently large to meet the driving requirements. After the vehicle is started, it accelerates to the vehicle speed threshold, and the battery pack begins to provide electrical energy. The electrical energy is converted into mechanical energy through the motor and coupled with hydraulic energy torque to achieve power mixing. It outputs electrical energy and hydraulic energy together as mechanical energy, which is converted into kinetic energy by the wheels to drive the vehicle to reduce the electrical power and current impact and increase the driving range.
- (3)
- Constant speed mode: As shown in the CD section, under uniform speed conditions, the traction of the vehicle needs only to overcome frictional resistance and slope resistance. The external load of the vehicle is relatively small during the start and acceleration conditions. At this time, the solenoid valve switch is closed, the hydraulic system does not operate, and the electric power alone outputs torque to drive the vehicle at a constant speed. Under this working condition, the motor can work in a high-efficiency region to a large extent. In addition, when the output power of the motor is large, the abundant power of the motor can also charge the hydraulic accumulator to further improve its operating point, not only to make the motor work stably in the high-efficiency region but also to reserve for operating conditions that require instantaneous high-power energy.
- (4)
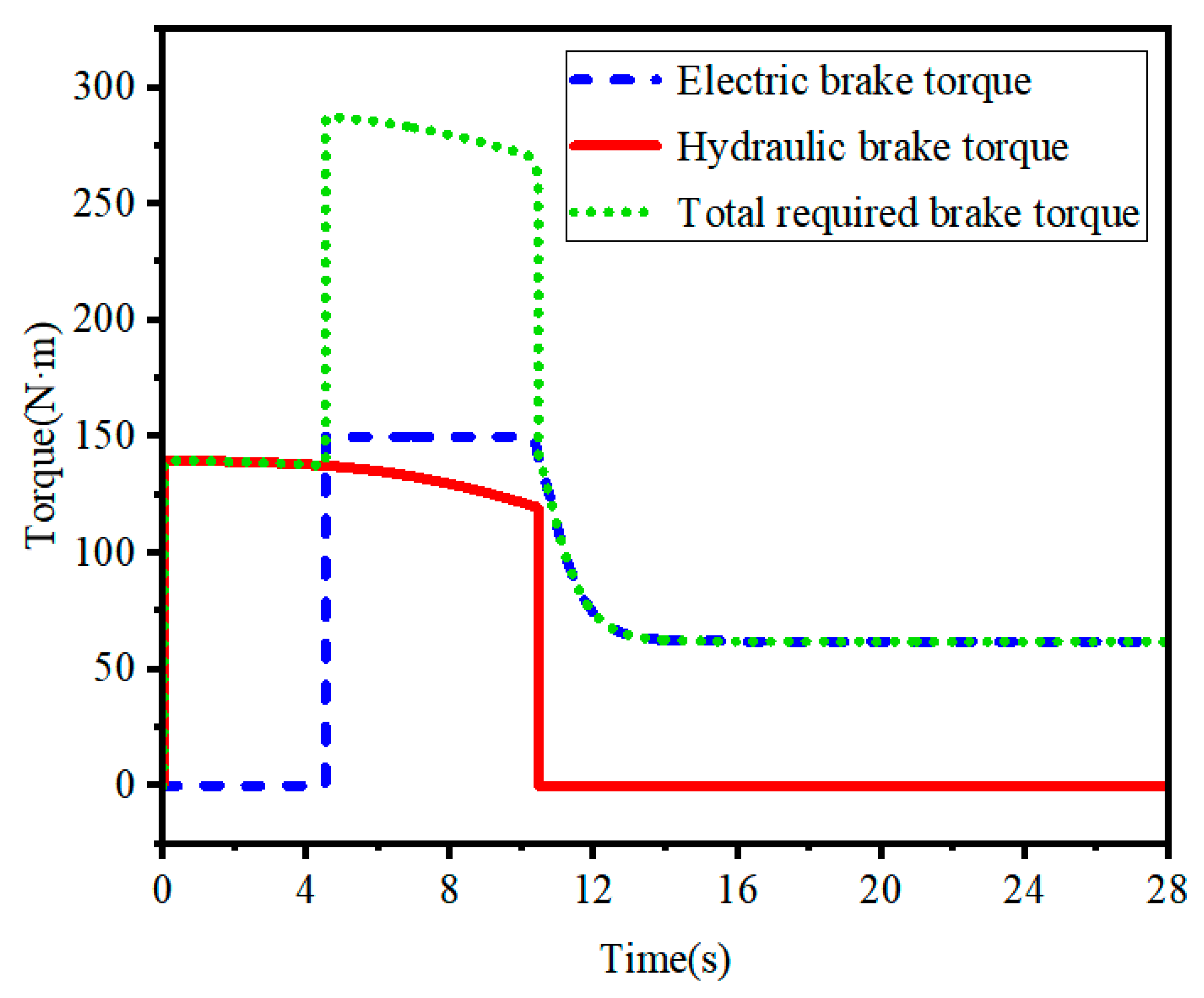
- Braking mode: As shown in section DE, when the vehicle is decelerating and braking, the regenerative braking energy is converted into hydraulic energy and recycled into the high-pressure accumulator. The remaining energy is converted into electrical energy by the generator and stored in the battery, which reserves a certain amount of hydraulic energy for the vehicle’s starting and acceleration conditions.
- (5)
- Idle mode: As shown in section EF, when the vehicle is idling, the electric power does not output mechanical energy to the outside. Instead, it converts electrical energy into hydraulic energy to charge hydraulic accumulators, which store energy for vehicle starting and working conditions that require instantaneous high power.
5. Simulation and Analysis
5.1. Basic Parameters
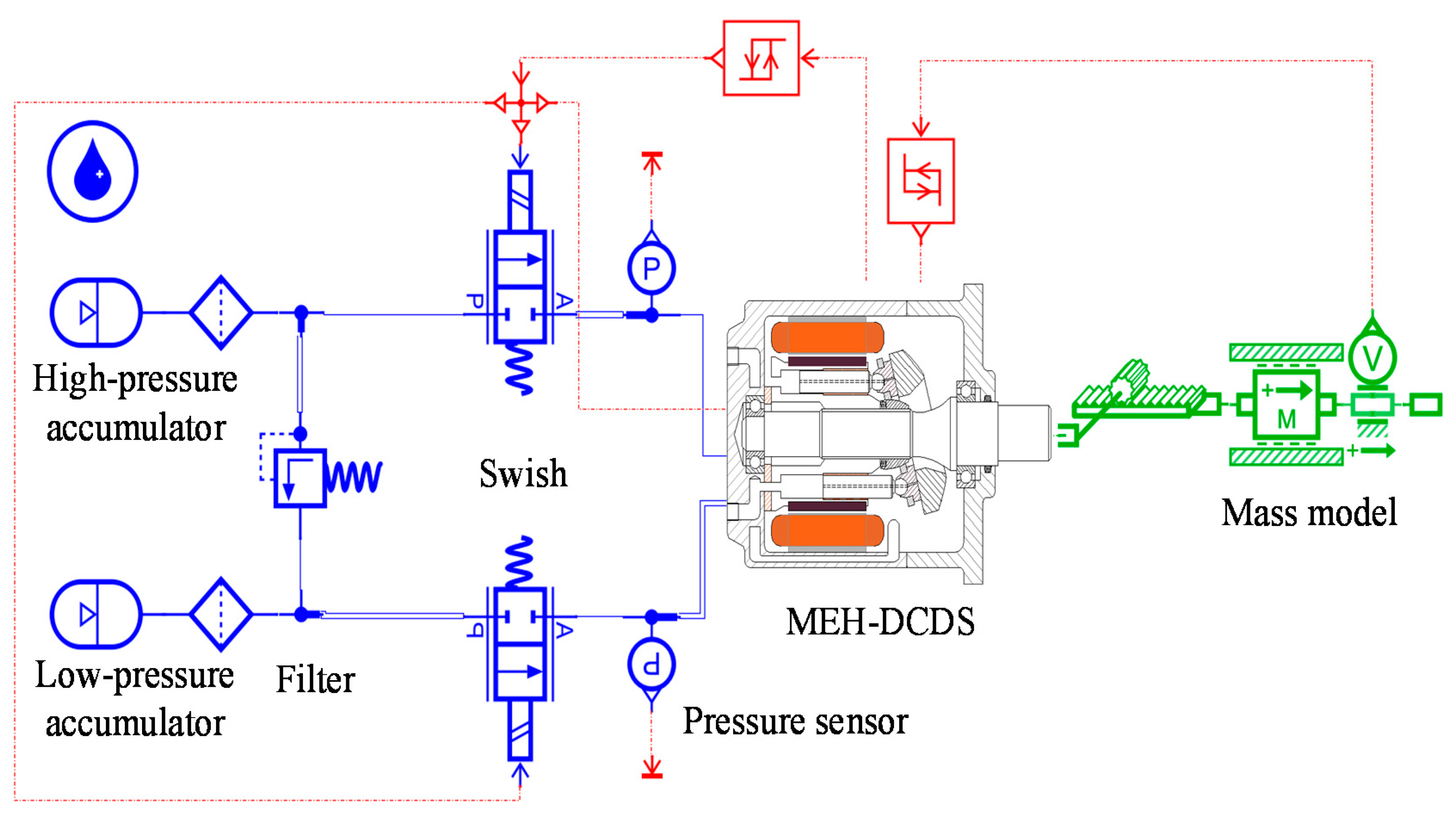
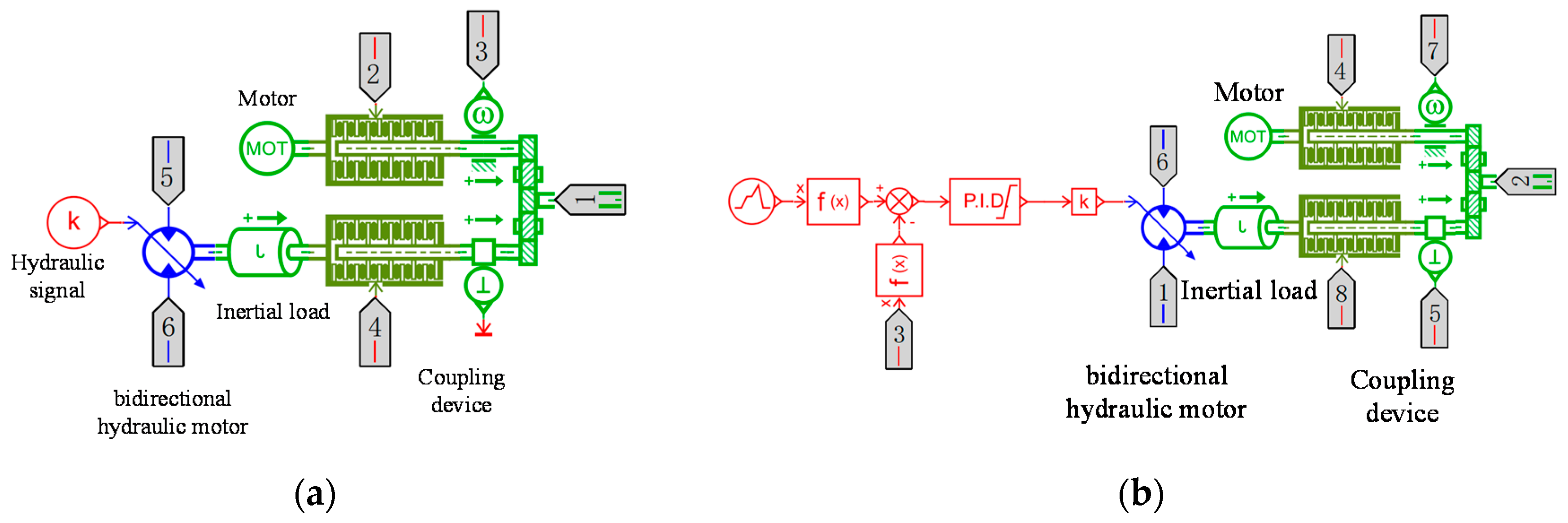
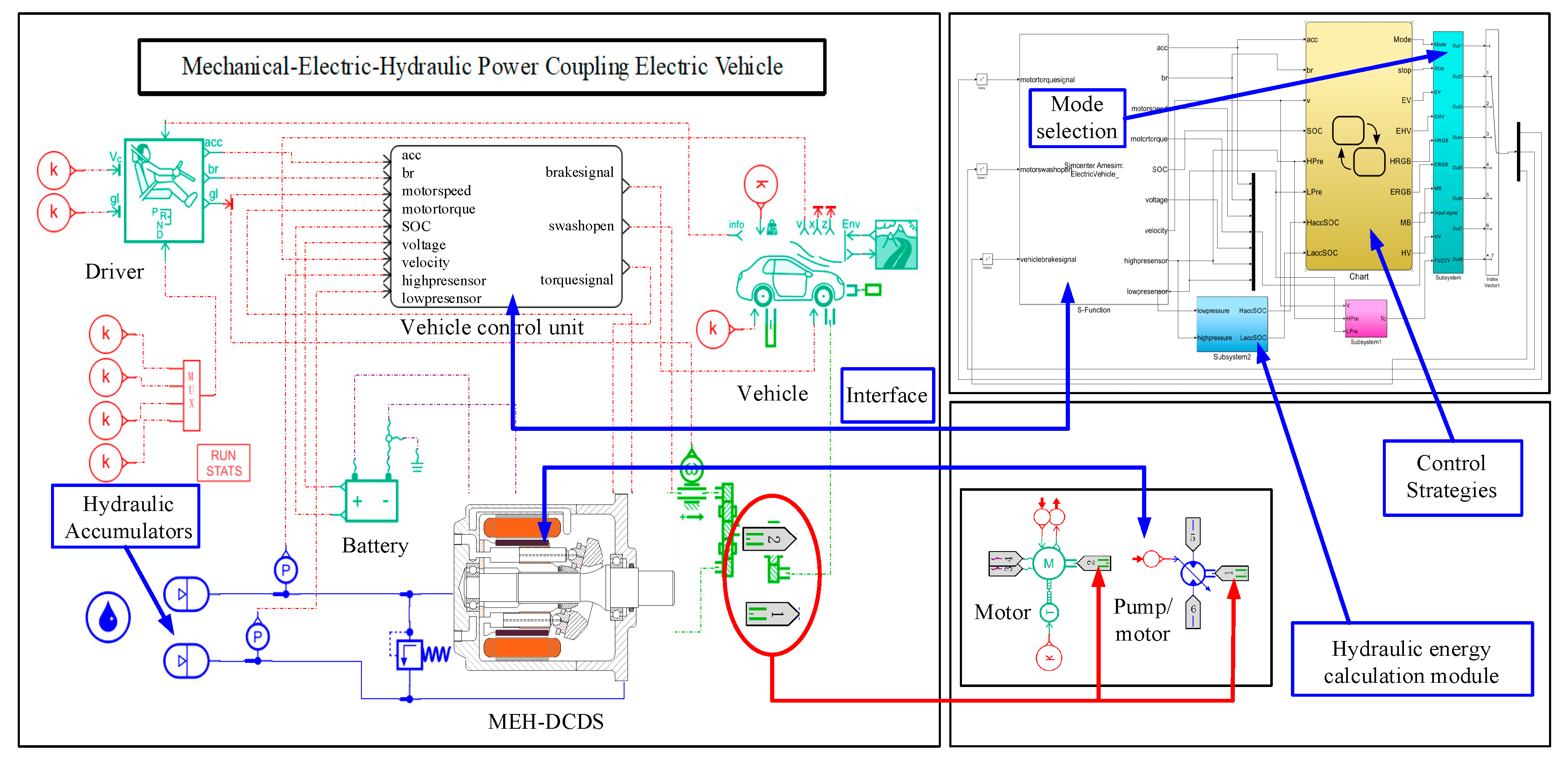
5.2. Simulation Model
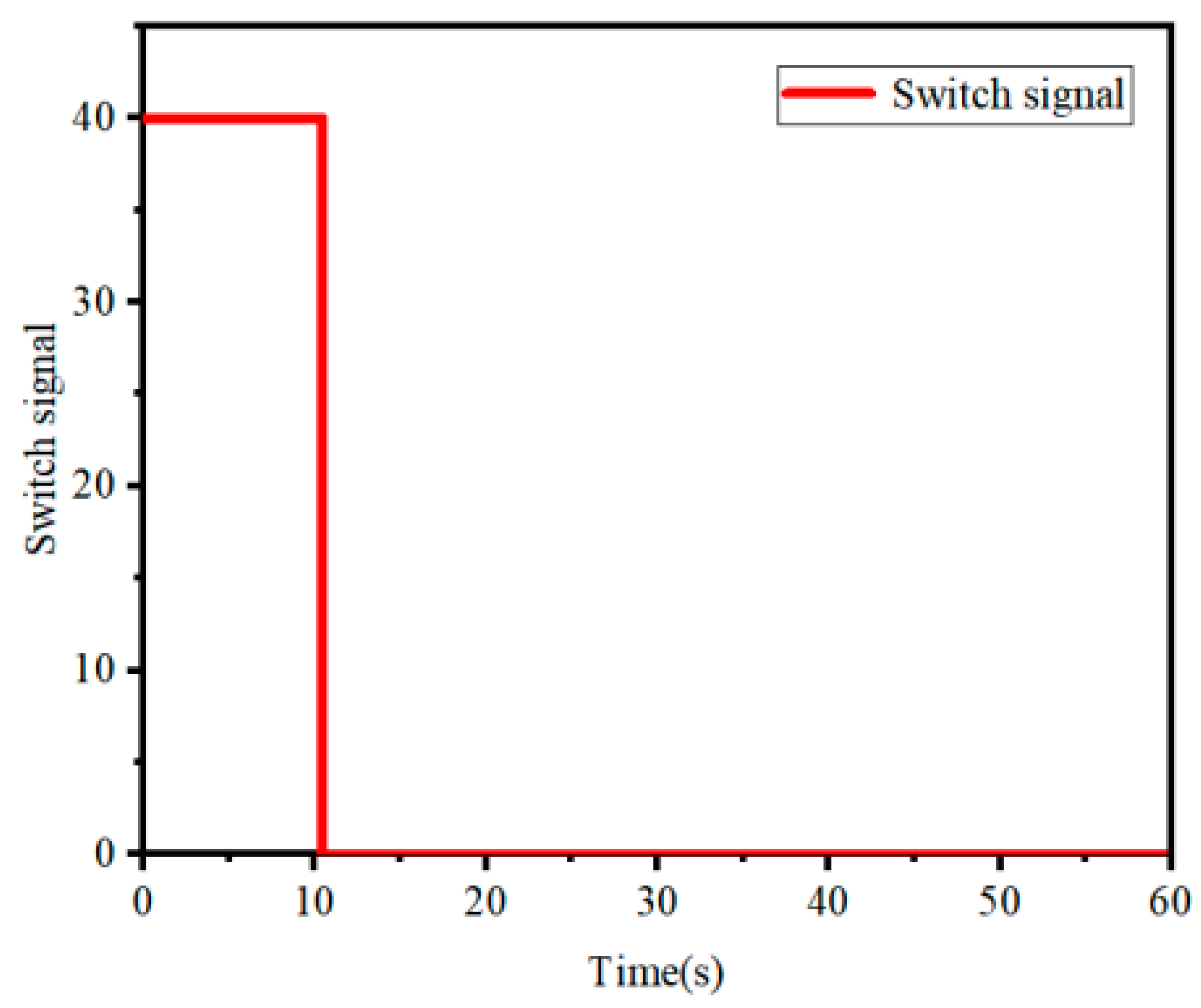
5.3. Analysis of the Simulation Results
6. Verification Based on Cyclic Conditions
6.1. Whole Vehicle Modeling
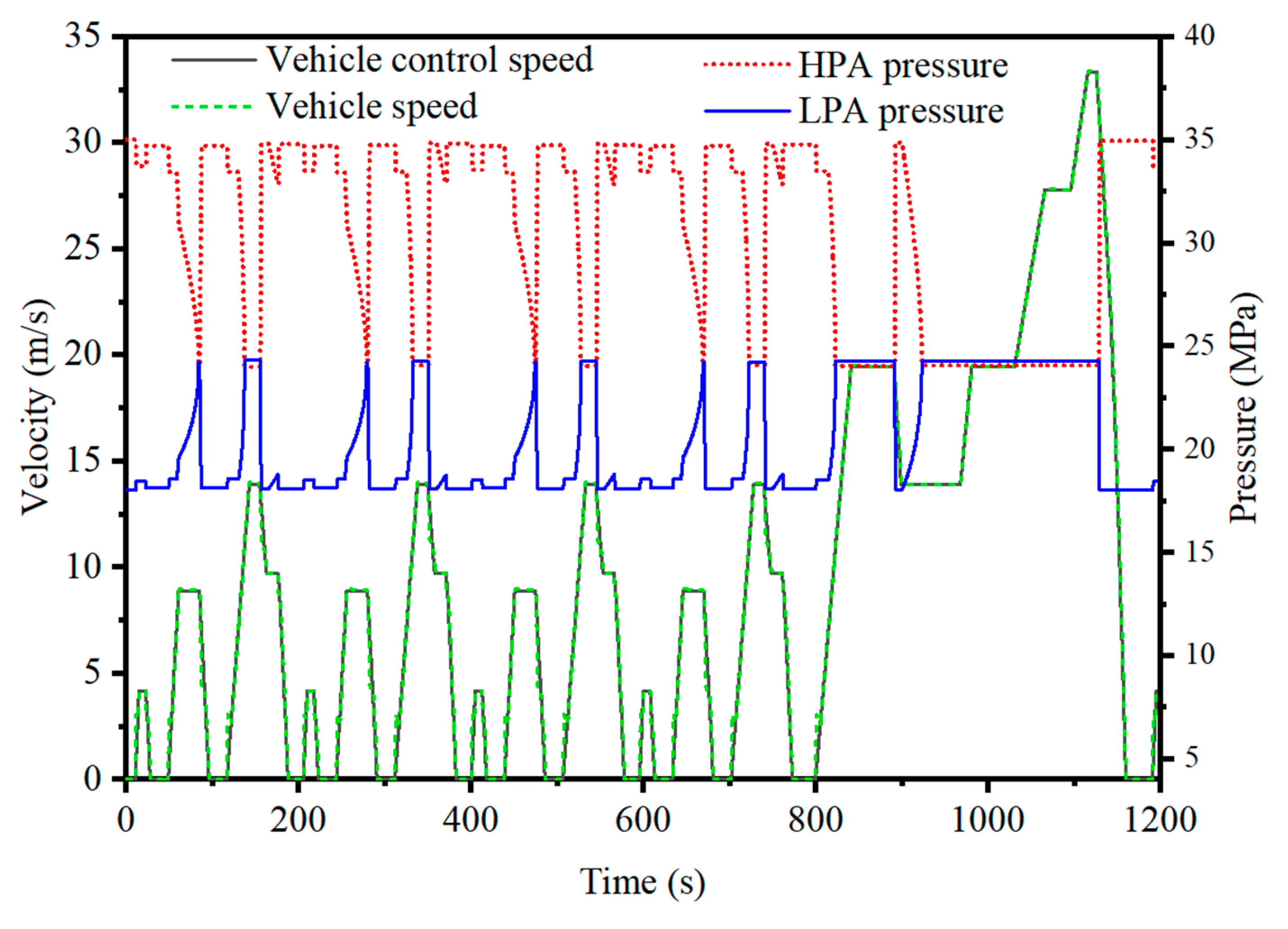
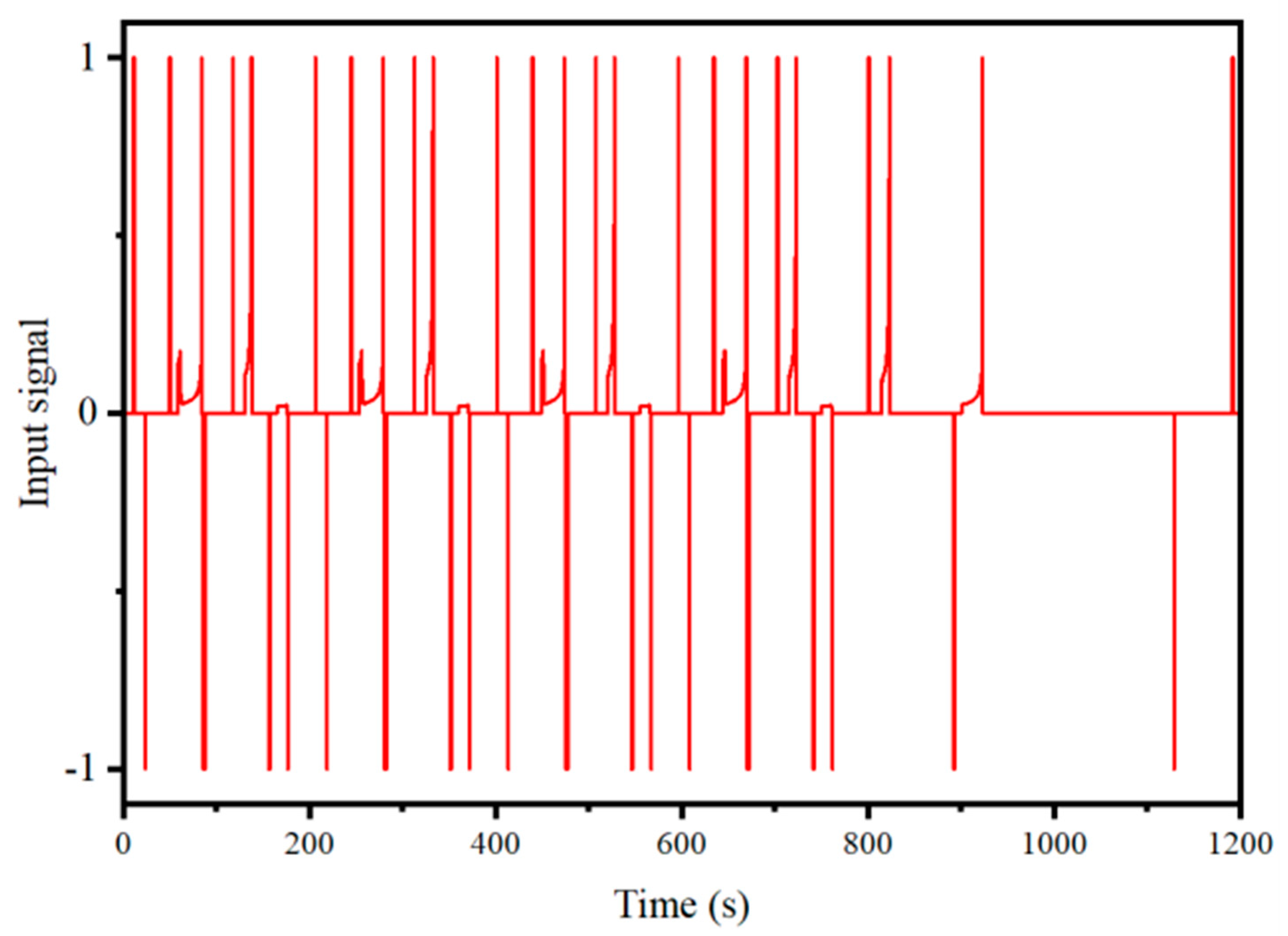
6.2. Results and Analysis of Validation
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hong, J.C.; Wang, Z.P.; Zhang, T.Z. Research on Performance Simulation of Load Isolation Pure Electric Driving Vehicles. Energy Procedia 2016, 104, 544–549. [Google Scholar] [CrossRef]
- Zhang, N.; Chen, X.; Yu, M. Materials chemistry for rechargeable zinc-ion batteries. Chen. Soc. Rev. 2020, 49, 4203–4219. [Google Scholar] [CrossRef] [PubMed]
- Lu, L.; Han, X.; Li, J.; Hua, J.; Ouyang, M. A review on the key issues for lithium-ion battery management in Electric Vehicles. J. Power Sources 2013, 226, 272–288. [Google Scholar] [CrossRef]
- Liu, K.; Luo, S.; Zhou, J. En-Route Battery Management and a Mixed Network Equilibrium Problem Based on Electric Vehicle Drivers’ En-Route Recharging Behaviors. Energies 2020, 13, 16. [Google Scholar] [CrossRef]
- Wu, Y.; Jiang, X.H.; Xie, J.Y. The reasons of rapid decline in cycle life of Li-ion battery. Battery Bimon. 2009, 39, 206–207. [Google Scholar]
- Deng, L.Z.; Wu, F.; Gao, X.G.; Wu, W. Development of a LiFePO4-based high power lithium secondary battery for HEVs applications. Rare Met. 2014, 39, 1457–1463. [Google Scholar] [CrossRef]
- Guo, W.; Cong, Z.; Guo, Z.; Chang, C.Y.; Pu, X. Dendrite-free Zn anode with dual channel 3D porous frameworks for rechargeable Zn batteries. Energy Storage Mater. 2020, 30, 104–112. [Google Scholar] [CrossRef]
- Wang, L.; Wang, X.; Yang, W. Optimal design of electric vehicle battery recycling network—From the perspective of electric vehicle manufacturers. Appl. Energy 2020, 275, 115328. [Google Scholar] [CrossRef]
- Zhao, K.G.; Liang, Z.H.; Huang, Y.J.; Wang, H.; Khajepour, A.; Zhen, Y.K. Research on a Novel Hydraulic/Electric Synergy Bus. Energies 2017, 11, 34. [Google Scholar] [CrossRef]
- Fiala, S.; Bubak, A.; Novotny, L. Control of hybrid electric-hydraulic drive for vertical feed axes of machine tools. MM Sci. J. 2019, 2019, 3228–3235. [Google Scholar] [CrossRef]
- Sun, H.; Jing, J.Q. Research on the System Configuration and Energy Control Strategy for Parallel Hydraulic Hybrid Loader. Automat. Constr. 2010, 19, 213–220. [Google Scholar]
- Pugi, L.; Pagliai, M.; Nocentini, A.; Lutzemberger, G.; Pretto, A. Design of a hydraulic servo-actuation fed by a regenerative braking system. Appl. Energy 2017, 187, 96–115. [Google Scholar] [CrossRef]
- Wang, J. Hierarchical Model Predictive Control for Hydraulic Hybrid Powertrain of a Construction Vehicle. Appl. Sci. 2020, 10, 745. [Google Scholar] [CrossRef]
- Pretto, A.; Pugi, L.; Pugi, L.; Giglioli, M.; Berzi, L.; Locorotondo, E. Simulation and design of a kit for the electrification of a light tricycle truck. Int. J. Heavy Veh. Syst. 2020, 27, 278–302. [Google Scholar] [CrossRef]
- Zhou, S.; Walker, P.; Tian, Y.; Zhang, N. Mode switching analysis and control for a parallel hydraulic hybrid vehicle. Veh. Syst. Dyn. 2020. [Google Scholar] [CrossRef]
- Niu, G.; Shang, F.; Krishnamurthy, M.; Garcia, J.M. Design and Analysis of an Electric Hydraulic Hybrid Powertrain in Electric Vehicles. IEEE Transp. Electr. 2016, 3, 48–57. [Google Scholar] [CrossRef]
- Hwang, H.Y.; Lan, T.S.; Chen, J.S. Optimization and Application for Hydraulic Electric Hybrid Vehicle. Energies 2020, 13, 322. [Google Scholar] [CrossRef]
- Sprengel, M.; Ivantysynova, M. Recent Developments in a Novel Blended Hydraulic Hybrid Transmission. SAE Tech. Pap. 2014, 2014. [Google Scholar] [CrossRef]
- Niu, G.; Shang, F.; Krishnamurthy, M. Evaluation and selection of accumulator size in electric-hydraulic hybrid (EH2) powertrain. ITEC 2016. [Google Scholar] [CrossRef]
- Midgley, W.; Cathcart, C.D. Modelling of hydraulic regenerative braking systems for heavy vehicles. Proc. Inst. Mech. Eng. 2013, 227, 1072–1084. [Google Scholar] [CrossRef]
- Wang, H.; Wang, Q. Parameter Matching and Control of Series Hybrid Hydraulic Excavator based on Electro-hydraulic. Composite Energy Storage. IEEE Access 2020, 8, 111899–111912. [Google Scholar] [CrossRef]
- Zhou, H.C.; Xu, Z.P.; Liu, L.; Liu, D.; Zhang, L.L. Design and validation of a novel hydraulic hybrid vehicle with wheel motors. Sci. Prog. 2019, 103, 003685041987802. [Google Scholar] [CrossRef] [PubMed]
- Nadeau, J.; Micheau, P.; Boisvert, M. Collaborative control of a dual electro-hydraulic regenerative brake system for a rear-wheel-drive electric vehicle. Proc. Inst. Mech. Eng. 2018, 233, 1035–1046. [Google Scholar] [CrossRef]
- Zhao, W.Z.; Zhou, X.C.; Wang, C.Y.; Luan, Z.K. Energy analysis and optimization design of vehicle electro-hydraulic compound steering system. Appl. Energy 2019, 255, 113713. [Google Scholar] [CrossRef]
- Liu, H.L.; Chen, G.P.; Xie, C.X.; Li, D.F.; Wang, J.W.; Li, S. Research on energy-saving characteristics of battery-powered electric-hydrostatic hydraulic hybrid rail vehicles. Energy 2020, 205, 118079. [Google Scholar] [CrossRef]
- Li, J.S.; Zhao, J.Y.; Zhang, X.C. A Novel Energy Recovery System Integrating Flywheel and Flow Regeneration for a Hydraulic Excavator Boom System. Energies 2020, 13, 315. [Google Scholar] [CrossRef]
- Hong, J.C.; Wang, Z.P.; Zhang, T.Z.; Yin, H.X.; Zhang, H.X.; Huo, W.; Zhang, Y.; Li, Y. Research on integration simulation and balance control of a novel load isolated pure electric driving system. Energy 2019, 189, 116220. [Google Scholar] [CrossRef]
- Wu, W.; Di, C.; Hu, J. Dynamics of a hydraulic-transformer-controlled hydraulic motor system for automobiles. Proc. Inst. Mech. Eng. 2016, 230, 229–239. [Google Scholar] [CrossRef]
- Golman, R.; Bhatia, S.; Kane, P.B. The dual accumulator model of strategic deliberation and decision making. Psychol. Rev. 2020, 127, 477–504. [Google Scholar] [CrossRef]
- Xin, Y.F.; Zhang, T.Z.; Zhang, H.X.; Zhao, Q.H.; Zheng, J.; Wang, C.C. Fuzzy Logic Optimization of Composite Brake Control Strategy for Load-Isolated Electric Bus. Math. Probl. Eng. 2019, 2019, 9735368. [Google Scholar] [CrossRef]
- Yang, Y.; Zhong, Z.; Wang, F.; Fu, C.Y.; Liao, J.Z. Real-time Energy Management Strategy for Oil-Electric-Liquid Hybrid System Based on Lowest Instantaneous Energy Consumption Cost. Energies 2020, 13, 4. [Google Scholar] [CrossRef]
- Zhou, S.; Walker, P.; Zhang, N. Parametric design and regenerative braking control of a parallel hydraulic hybrid vehicle. Mech. Mach. Theory 2020, 146, 103714. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
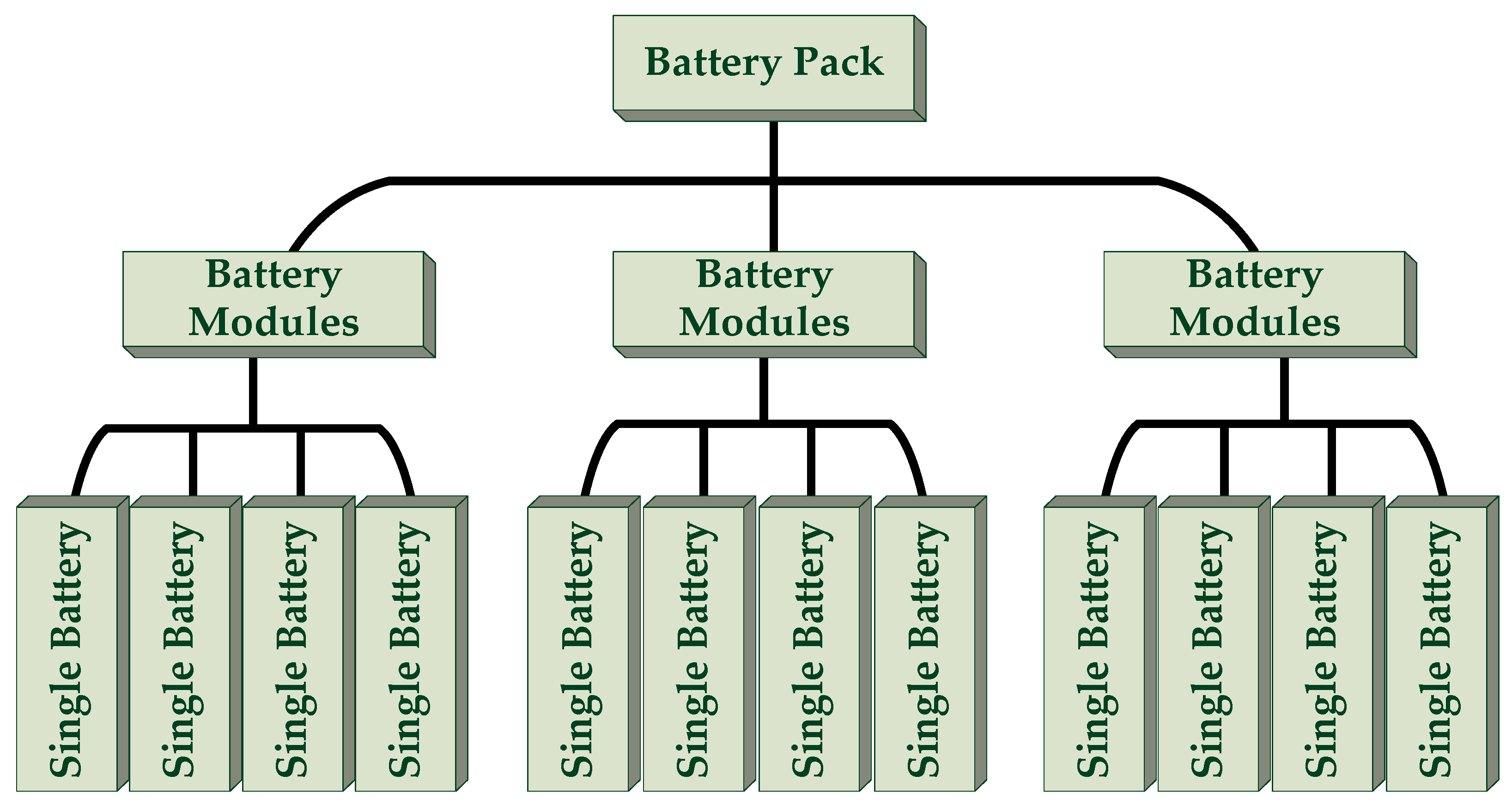
| Battery Pack Parameters | Value | Unit |
|---|---|---|
| Voltage of the battery pack | 310 | V |
| Maximum power of the battery pack | 35 | kw |
| Battery pack capacity | 65 | Ah |
| Number of battery modules connected in parallel | 1 | None |
| Number of battery modules in series | 6 | None |
| Number of individual cells in series per module | 40 | None |
| Working Mode | Power Source | Diagram of Energy Flow | |
|---|---|---|---|
| Motor | Hydraulic Pump/Motor | ||
| Starting mode | — | Hydraulic motor |  |
| Acceleration/climbing mode | Motor | Hydraulic motor |  |
| Constant speed mode | Motor | — |  |
| Braking mode | Generator | Hydraulic pump |  |
| Idle mode | Motor | Hydraulic pump |  |
| Components | Parameters | Value |
|---|---|---|
| Basic parameters of the vehicle | Loaded mass (m) | 1206 kg |
| Frontal area (A) | 2.28 m2 | |
| Rolling resistance coefficient (f) | 0.0135 | |
| Coefficient of air resistance (CD) | 0.32 | |
| Wheel width (R) | 290 mm | |
| Transmission efficiency (η) | 0.85 | |
| High pressure accumulator | Work pressure (P1) | 24–35 MPa |
| Volume (V) | 35 L | |
| Low pressure accumulator | Work pressure (P2) | 6–22 MPa |
| Volume (V) | 35 L | |
| Secondary component | Displacement (Vp) | 30 mL·r−1 |
| Motor | Rated power (Pe) | 32 kW |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Zhang, T.; Zhang, H.; Hong, J.; Meng, Z. Research on the Starting Acceleration Characteristics of a New Mechanical–Electric–Hydraulic Power Coupling Electric Vehicle. Energies 2020, 13, 6279. https://doi.org/10.3390/en13236279
Yang J, Zhang T, Zhang H, Hong J, Meng Z. Research on the Starting Acceleration Characteristics of a New Mechanical–Electric–Hydraulic Power Coupling Electric Vehicle. Energies. 2020; 13(23):6279. https://doi.org/10.3390/en13236279
Chicago/Turabian StyleYang, Jian, Tiezhu Zhang, Hongxin Zhang, Jichao Hong, and Zewen Meng. 2020. "Research on the Starting Acceleration Characteristics of a New Mechanical–Electric–Hydraulic Power Coupling Electric Vehicle" Energies 13, no. 23: 6279. https://doi.org/10.3390/en13236279
APA StyleYang, J., Zhang, T., Zhang, H., Hong, J., & Meng, Z. (2020). Research on the Starting Acceleration Characteristics of a New Mechanical–Electric–Hydraulic Power Coupling Electric Vehicle. Energies, 13(23), 6279. https://doi.org/10.3390/en13236279