Variable Pitch Propeller for UAV-Experimental Tests


Abstract
1. Introduction
2. Materials and Methods
3. Results
3.1. Blade Characteristics
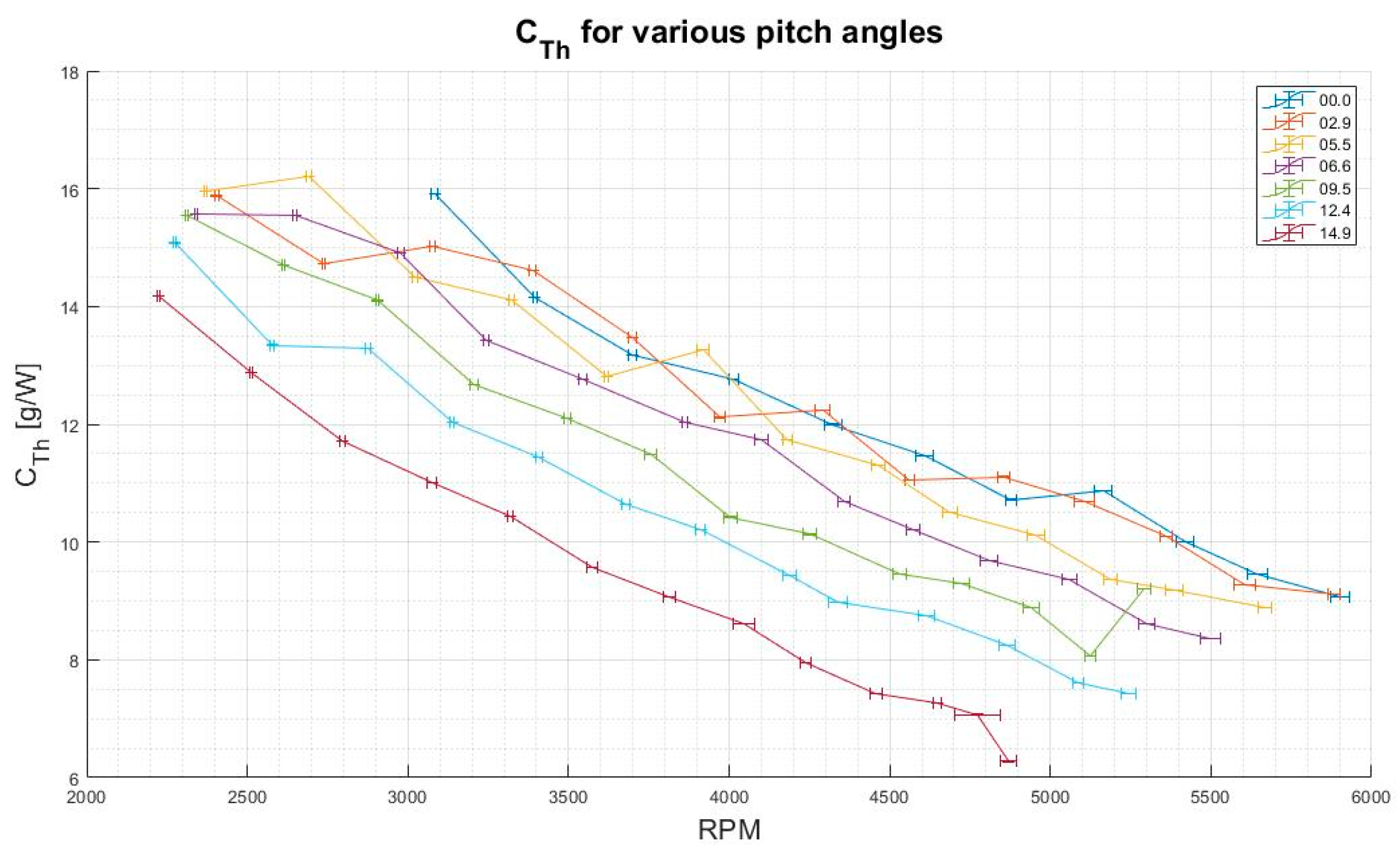
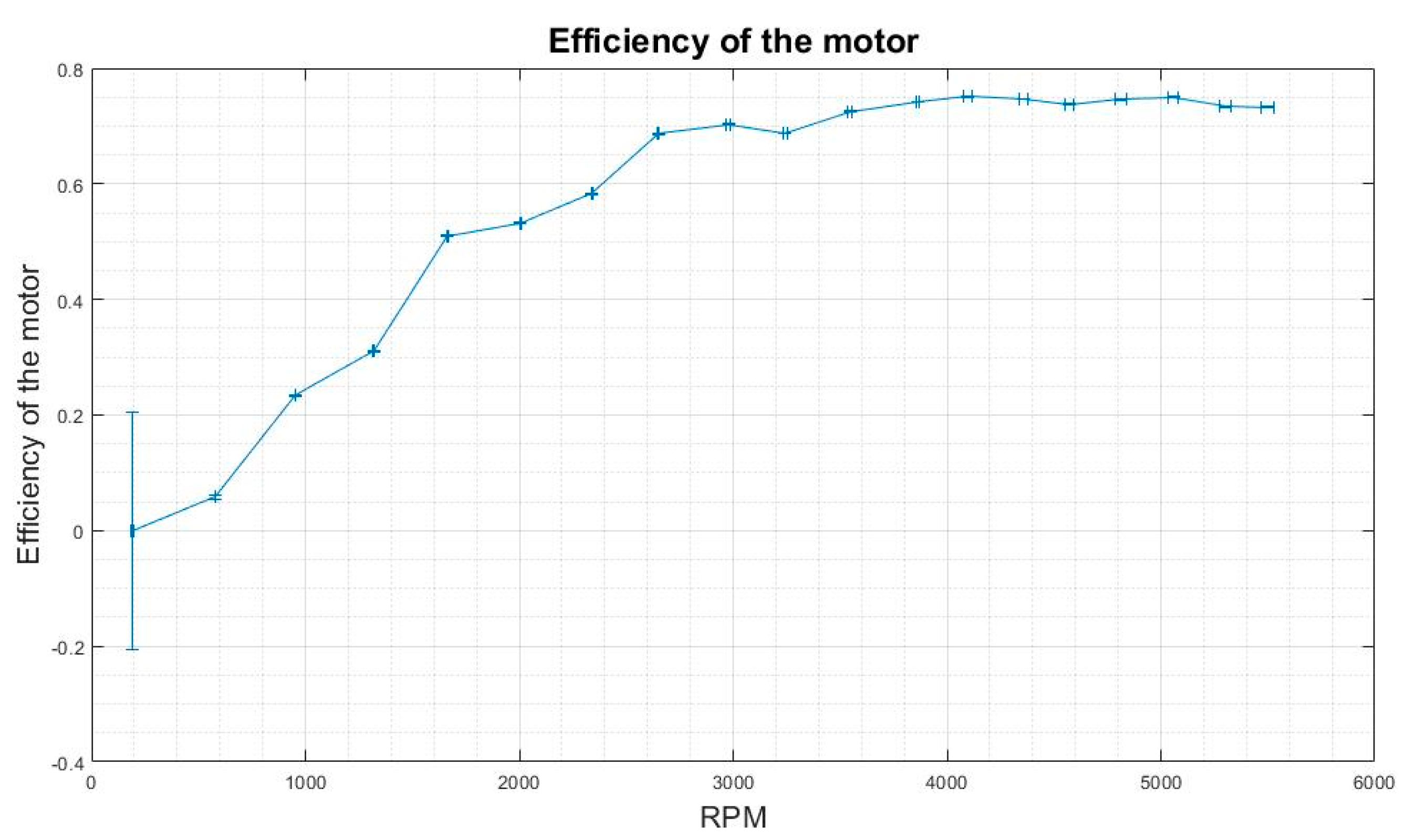
3.2. Coefficient of Thrust during Hover and Motor Efficiency Analysis
3.3. Recommendation towards a Pitch Control System Application
4. Discussion and Conclusions
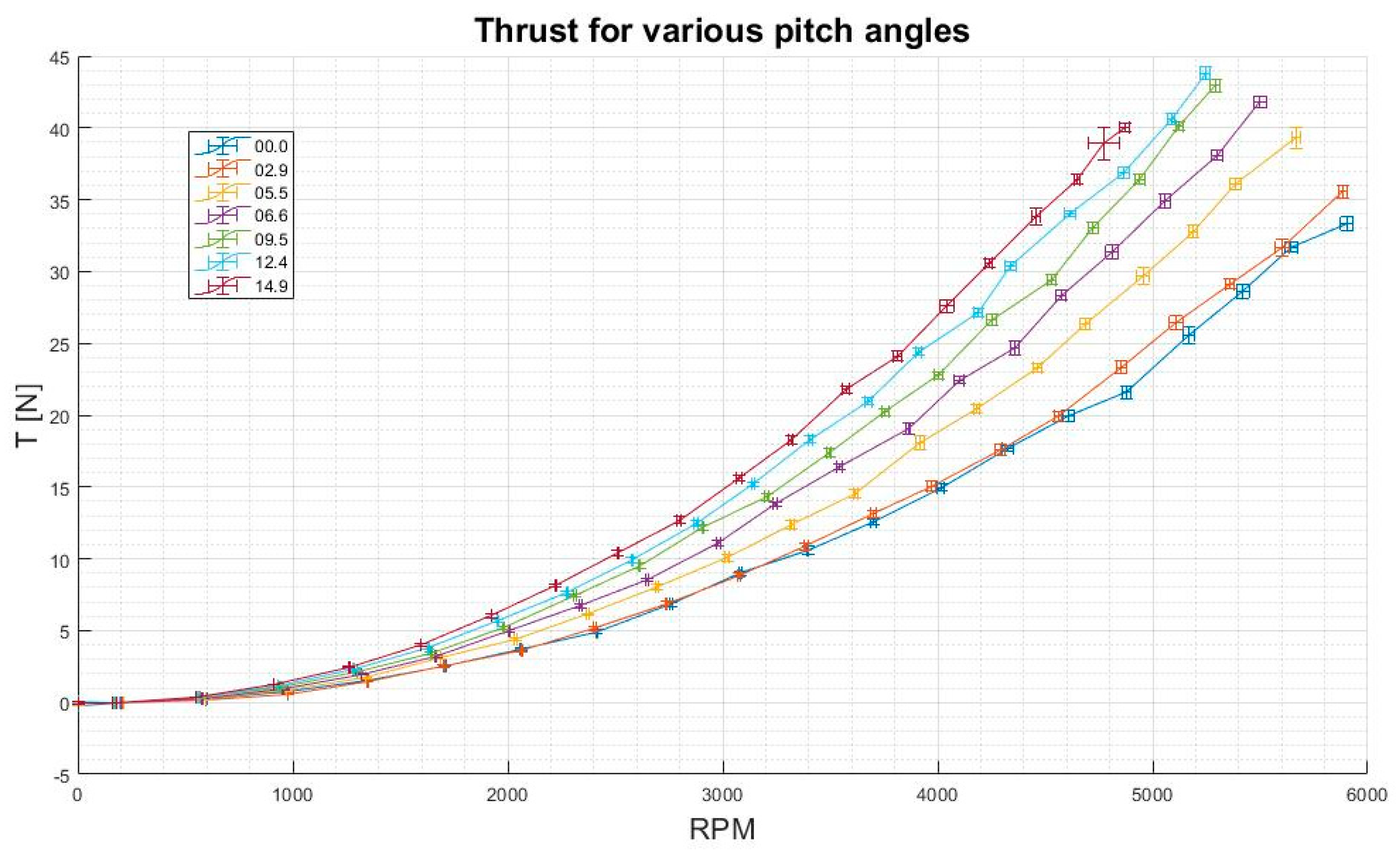
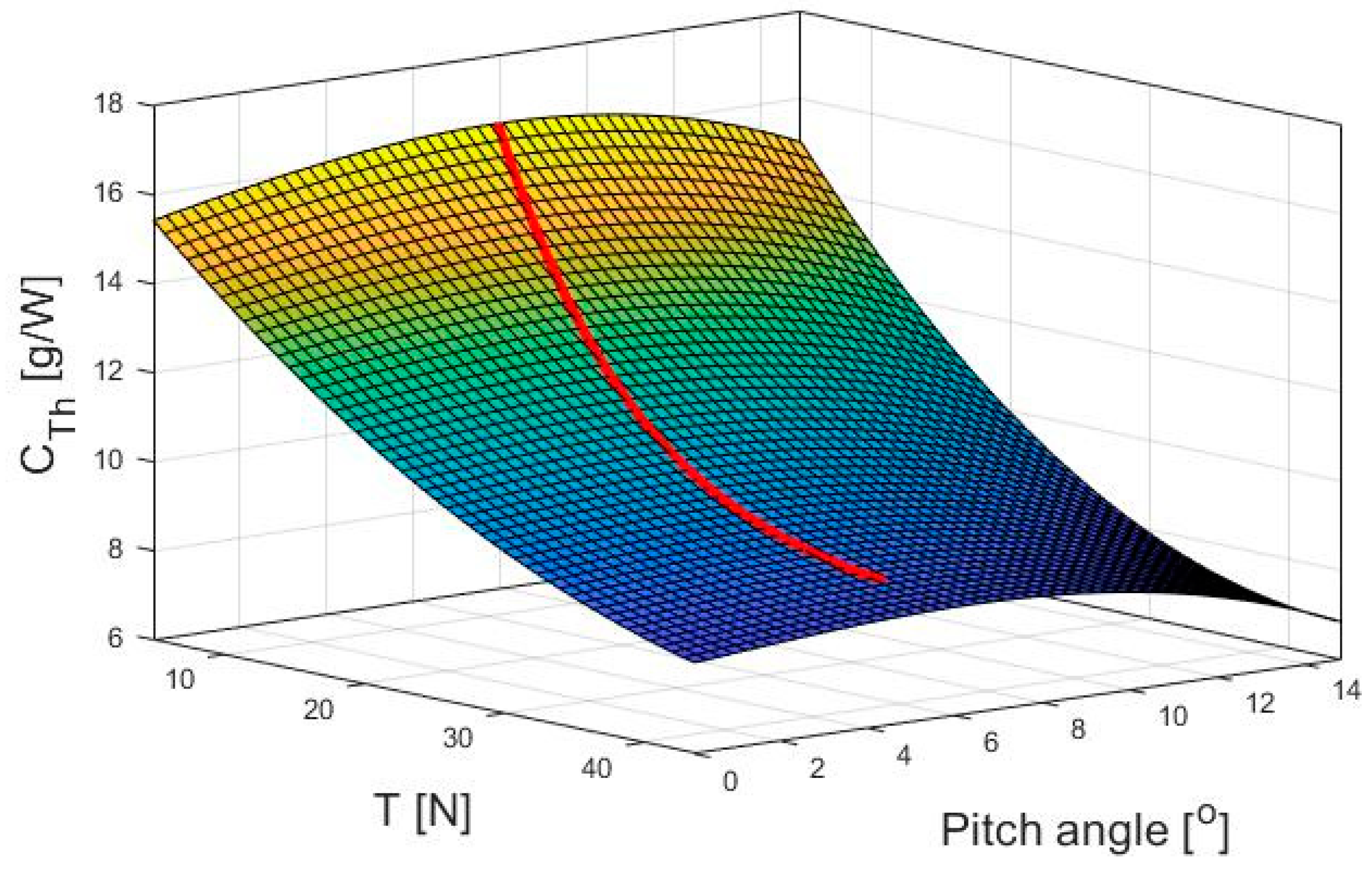
- Based on the dependence showed in Figure 5, it is indicated that the temporary load capacity can be significantly increased by changing the pitch angle of blades. The increase in thrust measured was 31% for 12.5°.
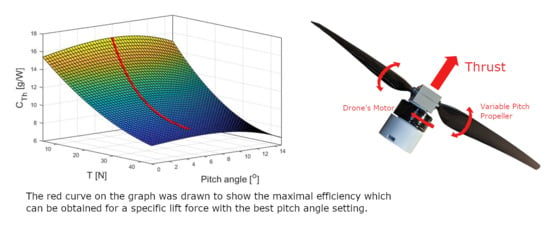
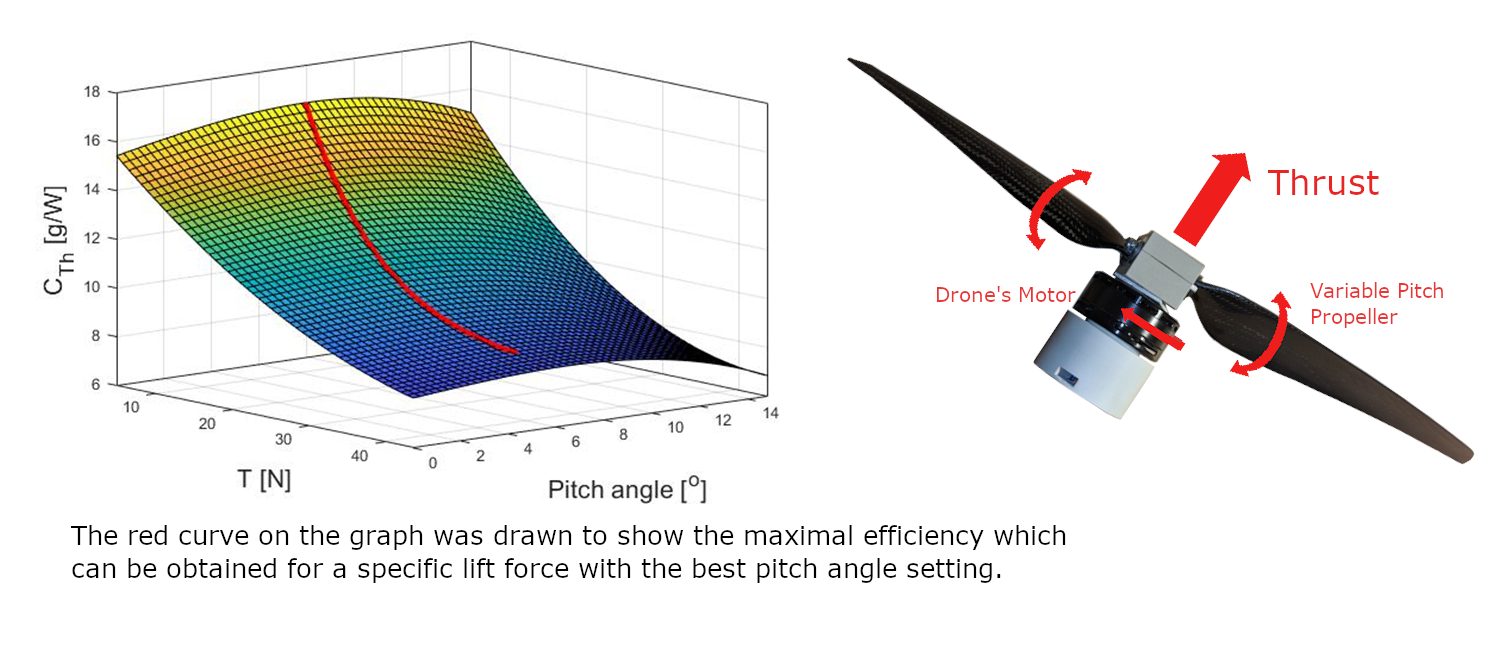
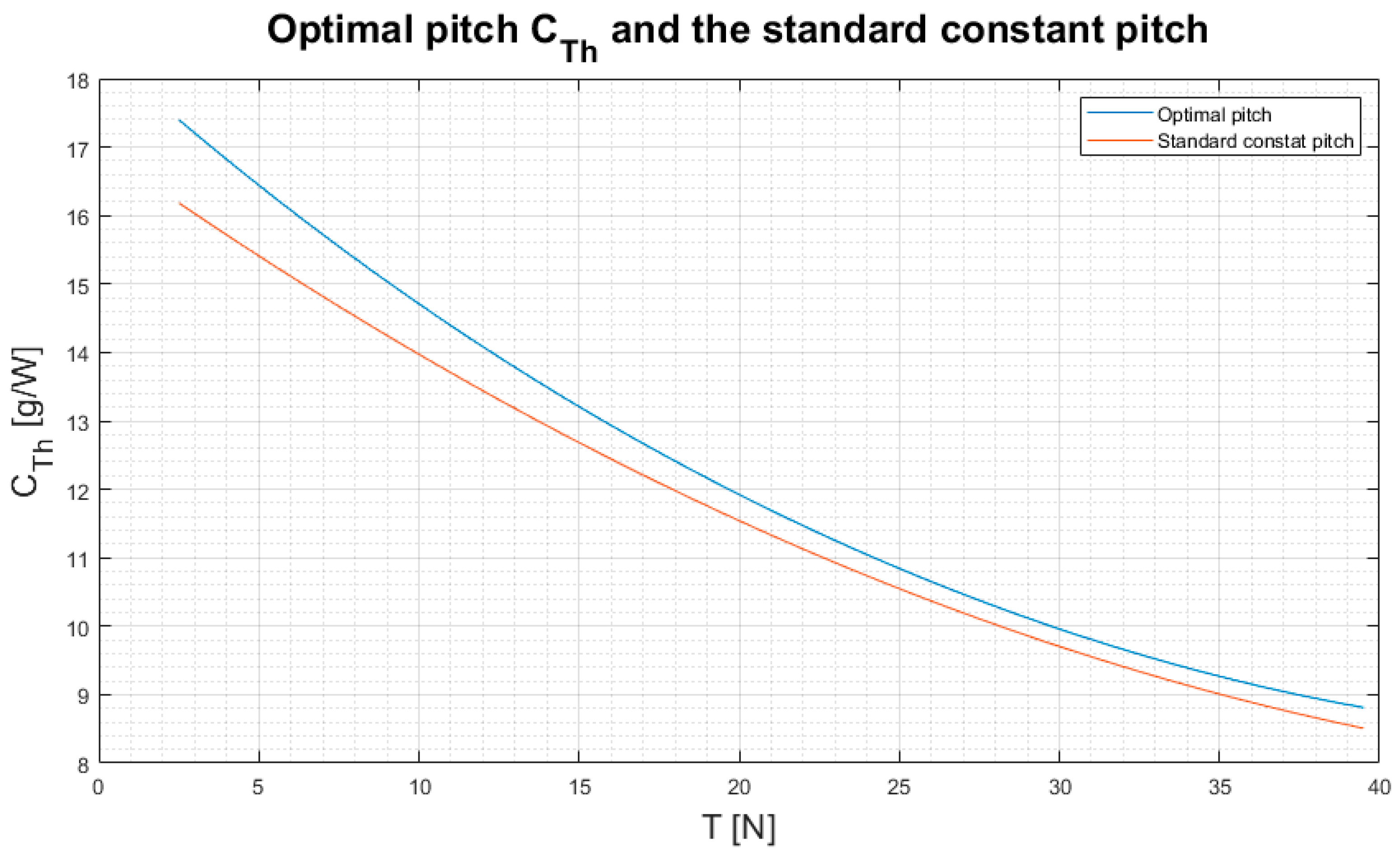
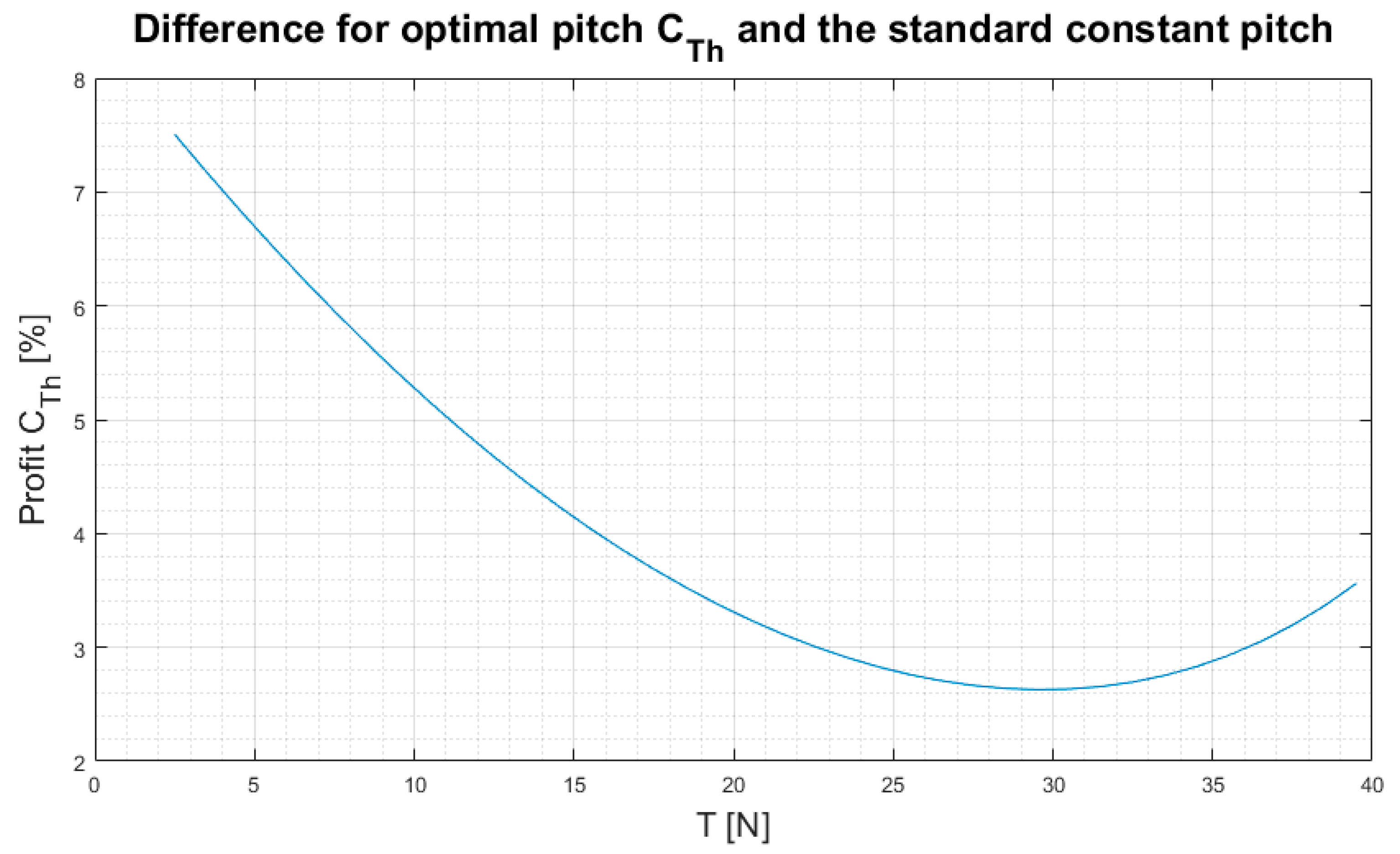
- Another benefit of using a variable pitch propeller is an ability to set the propeller pitch angle according to the needed thrust. We have shown that thanks to our method, efficiency of the flight in hover can be improved from 2.6% up to 7.5% depending on the needed thrust.
- The presented mathematical model can be used for similar propellers in a wide range of rotational speeds inherent to UAV motors. There is one optimal blade pitch angle that allows hovering with the least energy consumption for a particular thrust that is required for UAV hovering.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbol/Abbreviation | Units | Description |
| CT | - | Coefficient of thrust |
| CP | - | Coefficient of power |
| CTh | g/W | Coefficient of thrust during hover |
| D | m | Propeller diameter |
| g | m/s2 | Acceleration due to gravity |
| I | A | Current |
| Q | N·m | Rotational torque |
| n, rpm | rev/min | Rotation per minute |
| Pm | W | Mechanical power |
| Pe | W | Electrical power |
| R | m | Rotor blade radius |
| T | N | Thrust |
| U | V | Voltage |
| Uηm, UCT, UP, UCTh | Uncertainty of the corresponding measurement | |
| α | deg | Angle of attack |
| ηm | - | Efficiency of the motor |
| ρ | kg/m3 | Air density |
| θ | deg | Blade pitch angle |
| Φ | deg | Inflow angle |
| Ω | rad/s | Rotor angular velocity (rad/sec) |
| ESC | Electric speed controller | |
| VTOL | Vertical Takeoff Landing | |
| UAV | Unmanned Aerial Vehicle |
References
- Gordon, M.; Kondor, S.; Corban, E.; Schrage, D. Rotorcraft aerial robot challenges and solutions. In Proceedings of the Digital Avionics System Conference, Fort Worth, TX, USA, 25–28 October 1993; pp. 298–305. [Google Scholar]
- Park, D.; Lee, Y.; Cho, T.; Kim, C. Design and performance evaluation of propeller for solar-powered high-altitude long-endurance unmanned aerial vehicle. Int. J. Aerosp. Eng. 2018, 2018, 1–23. [Google Scholar] [CrossRef]
- Torabbeigi, M.; Lim, G.J.; Kim, S.J. Drone Delivery Scheduling Optimization Considering Payload-induced Battery Consumption Rates. J. Intell. Robot. Syst. 2020, 97, 471–487. [Google Scholar] [CrossRef]
- Oh, T.H. Conceptual design of small unmanned aerial vehicle with proton exchange membrane fuel cell system for long endurance mission. Energy Convers. Manag. 2018, 176, 349–356. [Google Scholar] [CrossRef]
- Sun, S.; Visser, C. Aerodynamic Model Identification of a Quadrotor Subjected to Rotor Failures in the High-Speed Flight Regime. IEEE Robot. Autom. Lett. 2019, 4, 3868–3875. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkef, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Horla, D.; Cieślak, J. On Obtaining Energy-Optimal Trajectories for Landing of UAVs. Energies 2020, 13, 2062. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects. Appl. Energy 2019, 255, 113823. [Google Scholar] [CrossRef]
- Chaturvedi, S.K.; Sekhar, R.; Banerjee, S.; Kamal, H. Comparative Review Study of Military and Civilian Unmanned Aerial Vehicles (UAVs). INCAS Bull. 2019, 11, 183–198. [Google Scholar] [CrossRef]
- Chan, K.I. Generalized Aerodynamic Optimization of Hovering Coaxial Rotor Blades. J. Am. Helicopter Soc. 2019, 64, 1–13. [Google Scholar] [CrossRef]
- Kirschstein, T. Comparison of energy demands of drone-based and ground-based parcel delivery services. Transp. Res. Part D Transp. Environ. 2020, 78, 102209. [Google Scholar] [CrossRef]
- Mohiuddin, A.; Taha, T.; Zweiri, Y.; Gan, D. UAV Payload Transportation via RTDP Based Optimized Velocity Profiles. Energies 2019, 12, 3049. [Google Scholar] [CrossRef]
- Scott, J.E.; Scott, C.H. Drone Delivery Models for Healthcare. In Proceedings of the 50th Hawaii International Conference on System Sciences, Waikoloa, HI, USA, 4–7 January 2017; pp. 1–8. [Google Scholar]
- Kellermann, R.; Biehle, T.; Fischer, L. Drones for parcel and passenger transportation: A literature review. Transp. Res. Interdiscip. Perspect. 2020, 4, 100088. [Google Scholar] [CrossRef]
- Zaludin, Z.; Harituddin, A.S.M. Challenges and Trends of Changing from Hover to Forward Flight for a Converted Hybrid Fixed Wing VTOL UAS from Automatic Flight Control System Perspective. In Proceedings of the 2019 IEEE 9th International Conference on System Engineering and Technology (ICSET), Shah Alam, Malaysia, 7 October 2019; pp. 247–252. [Google Scholar]
- Wu, Y.; Du, X.; Duivenvoorden, R.; Kelly, J. The Phoenix Drone: An Open-Source Dual-Rotor Tail-Sitter Platform for Research and Education. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA’19), Montreal, QC, Canada, 20–24 May 2019; pp. 5330–5336. [Google Scholar]
- Wang, W.; Zhu, J.; Kuang, M.; Yuan, X.; Tang, Y.; Lai, Y.; Chen, L.; Yang, Y. Design and hovering control of a twin rotor tail-sitter UAV. Sci. China Inf. Sci. 2019, 62, 194202. [Google Scholar] [CrossRef]
- Phillips, B.P.; Hrishikeshavan, V.; Rand, O.; Chopra, I. Design and Development of a Scaled Quadrotor Biplane with Variable Pitch Proprotors for Rapid Payload Delivery. In Proceedings of the American Helicopter Society 72nd Annual Forum, West Palm Beach, FL, USA, 17–19 May 2016; pp. 302–315. [Google Scholar]
- Liu, N.; Cai, Z.; Zhao, J.; Wang, Y. Predictor-based model reference adaptive roll and yaw control of a quad-tiltrotor UAV. Chin. J. Aeronaut. 2019, 33, 282–295. [Google Scholar] [CrossRef]
- Chen, C.; Zhang, J.; Zhang, D.; Shen, L. Control and flight test of a tilt-rotor unmanned aerial vehicle. Int. J. Adv. Robot. Syst. 2017, 14, 1–12. [Google Scholar] [CrossRef]
- Cetinsoy, E.; Dikyar, S.; Hancer, C.; Oner, K.T.; Sirimoglu, E.; Unel, M.; Aksit, M. Design and construction of a novel quad tilt-wing UAV. Mechatronics 2012, 22, 723–745. [Google Scholar] [CrossRef]
- Brandt, J.B.; Selig, M.S. Propeller performance data at low Reynolds numbers. In Proceedings of the 49th AIAA Aerospace Sciences Meeting, Orlando, FL, USA, 4–7 January 2011; p. 1255. [Google Scholar]
- Stajuda, M.; Karczewski, M.; Obidowski, D.; Jóźwik, K. Development of a CFD model for propeller simulation. Mech. Mech. Eng. 2016, 20, 579–593. [Google Scholar]
- Kotarski, D.; Krznar, M.; Piljek, P.; Simunic, N. Experimental Identification and Characterization of Multirotor UAV Propulsion. In Proceedings of the 2nd International Conference on Measurement Instrumentation and Electronics, Prague, Czech Republic, 9–11 June 2017; pp. 16–24. [Google Scholar]
- OL, M.; Zeune, C.; Logan, M. Analytical—Experimental Comparison for Small Electric Unmanned Air Vehicle Propellers. In Proceedings of the 26th AIAA Applied Aerodynamics Conference, Honolulu, HI, USA, 18–21 August 2008; p. 7345. [Google Scholar]
- Merchant, M.; Miller, L.S. Propeller performance measurement for low Reynolds number UAV applications. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006; p. 1127. [Google Scholar]
- Ning, Z. Experimental Investigations on the Aerodynamic and Aeroacoustic Characteristics of Small UAS Propellers. Ph.D. Thesis, Iowa State University Capstones, Ames, IA, USA, 2018. [Google Scholar]
- Molter, C.; Cheng, P. Propeller performance calculation for multicopter aircraft at forward flight conditions and validation with wind tunnel measurements. In Proceedings of the International Micro Air Vehicle Conference and Flight Competition 2017, Toulouse, France, 18–21 September 2017; pp. 307–315. [Google Scholar]
- Lee, B.E.; Byun, Y.S.; Kim, J.; Kang, B.S. Experimental hover performance evaluation on a small-scale rotor using a rotor test stand. J. Mech. Sci. Technol. 2011, 25, 1449. [Google Scholar] [CrossRef]
- Shrestha, R.; Benedict, M.; Hrishikeshavan, V.; Chopra, I. Hover performance of a small-scale helicopter rotor for flying on mars. J. Aircr. 2016, 53, 1160–1167. [Google Scholar] [CrossRef]
- Panayotov, F.; Dobrev, I.; Massouh, F.; Todorov, M. Experimental study of a helicopter rotor model in hover. In Proceedings of the 10th International Scientific Conference on Aeronautics, Automotive and Railway Engineering and Technologies, Sozopol, Bulgaria, 15–17 September 2018; p. 01002. [Google Scholar]
- Cohen, R.; Miculescu, S.; Reilley, K.K.; Pakmehr, M.; Feron, E. Online Performance Optimization of a DC Motor Driving a Variable Pitch Propeller. Available online: https://arxiv.org/abs/1310.0133 (accessed on 5 August 2020).
- Manchiin, A.; Lafta, W.M.; Dao, D.V. Smart variable pitch propeller system for unmanned aerial vehicles. Int. J. Sci. Eng. Res. 2018, 7, 5238–5241. [Google Scholar]
- Abhishek, R.D.; Duhoon, A.; Kothari, M.; Kadukar, S.; Rane, L.; Suryavanshi, G. Design, Development, and Closed-loop Flight-Testing of a Single Power Plant Variable Pitch Quadrotor Unmanned Air Vehicle. In Proceedings of the 73rd American Helicopter Society Annual Forum 2017, Fort Worth, TX, USA, 9–11 May 2017; pp. 205–218. [Google Scholar]
- Chipade, V.S.; Kothari, M.; Chaudhari, R.R. Systematic design methodology for development and flight testing of a variable pitch quadrotor biplane VTOL UAV for payload delivery. Mechatronics 2018, 55, 94–114. [Google Scholar] [CrossRef]
- Arellano-Quintana, V.M.; Merchán-Cruz, E.A.; Franchi, A. A novel experimental model and a drag-optimal allocation method for variable-pitch propellers in multirotors. IEEE Access 2018, 6, 68155–68168. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Blade Angle (Degree) | Maximal Thrust (N) | Maximal Rotational Speed (rev/min) |
|---|---|---|
| 0.0 | 33.34 | 5902 |
| 2.9 | 35.55 | 5883 |
| 5.5 | 39.30 | 5668 |
| 6.6 | 41.79 | 5498 |
| 9.5 | 42.95 | 5290 |
| 12.4 | 43.78 | 5244 |
| 14.9 | 40.06 | 4869 |
| Coefficients | ||||||||
| Value |
| Coefficients | ||||
| Value |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Podsędkowski, M.; Konopiński, R.; Obidowski, D.; Koter, K. Variable Pitch Propeller for UAV-Experimental Tests. Energies 2020, 13, 5264. https://doi.org/10.3390/en13205264
Podsędkowski M, Konopiński R, Obidowski D, Koter K. Variable Pitch Propeller for UAV-Experimental Tests. Energies. 2020; 13(20):5264. https://doi.org/10.3390/en13205264
Chicago/Turabian StylePodsędkowski, Maciej, Rafał Konopiński, Damian Obidowski, and Katarzyna Koter. 2020. "Variable Pitch Propeller for UAV-Experimental Tests" Energies 13, no. 20: 5264. https://doi.org/10.3390/en13205264
APA StylePodsędkowski, M., Konopiński, R., Obidowski, D., & Koter, K. (2020). Variable Pitch Propeller for UAV-Experimental Tests. Energies, 13(20), 5264. https://doi.org/10.3390/en13205264