Evaluation of Phase Imbalance Compensation for Mitigating DFIG-Series Capacitor Interaction



Abstract
1. Introduction
2. Overview of Hardware Solutions for Mitigating DFIG-SSR
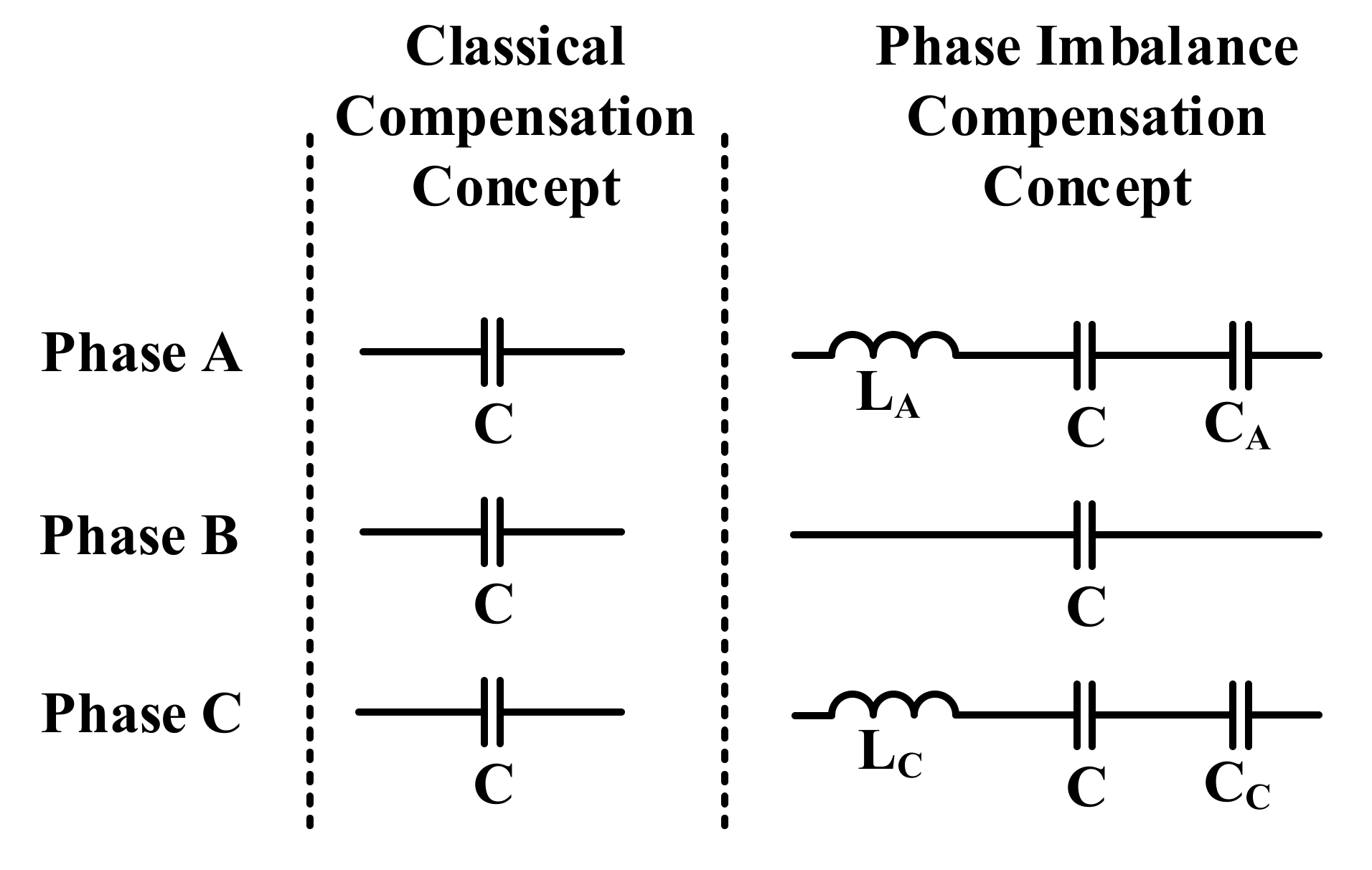
3. Classical Compensation Scheme
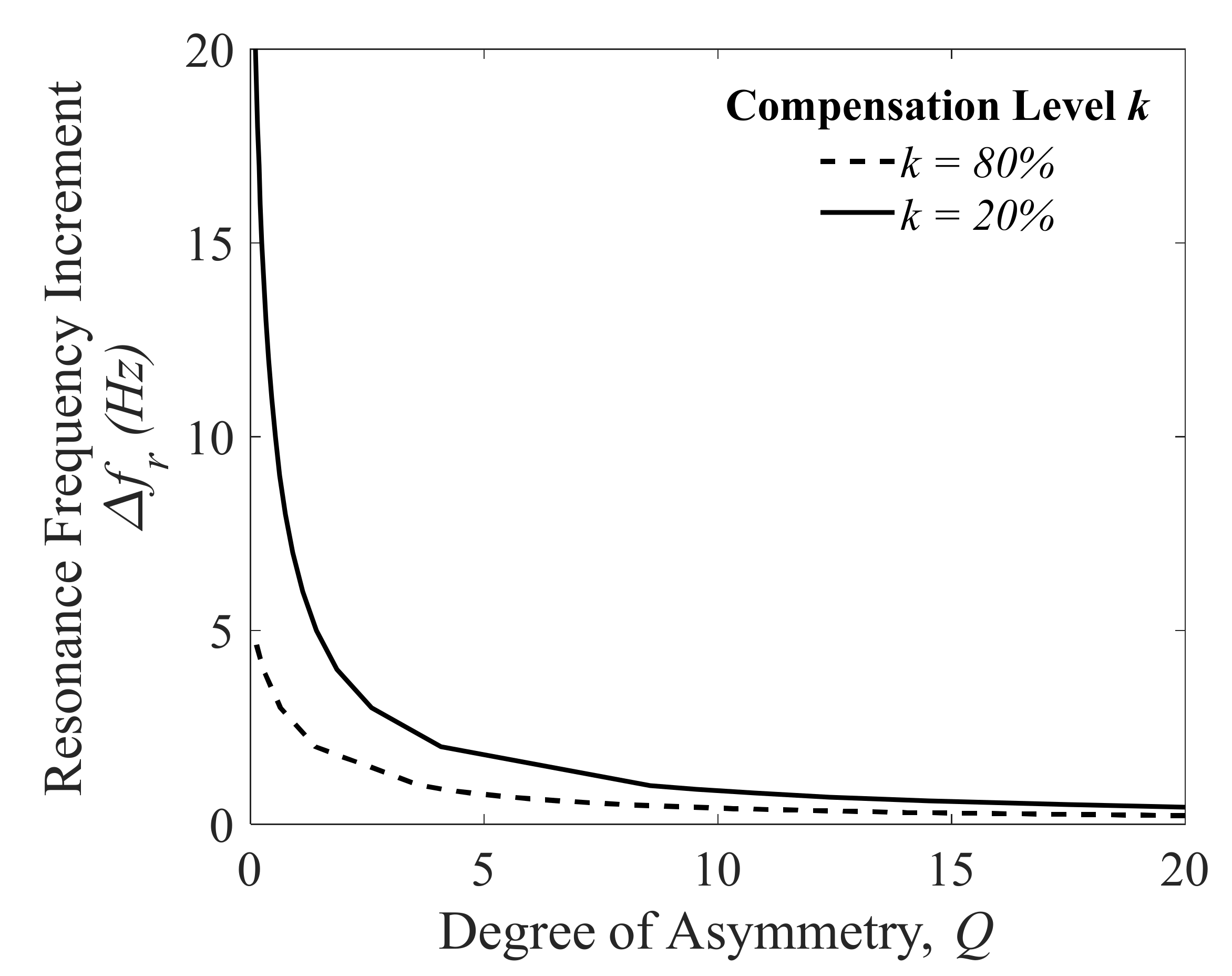
4. Phase Imbalance Compensation
4.1. Concept Description
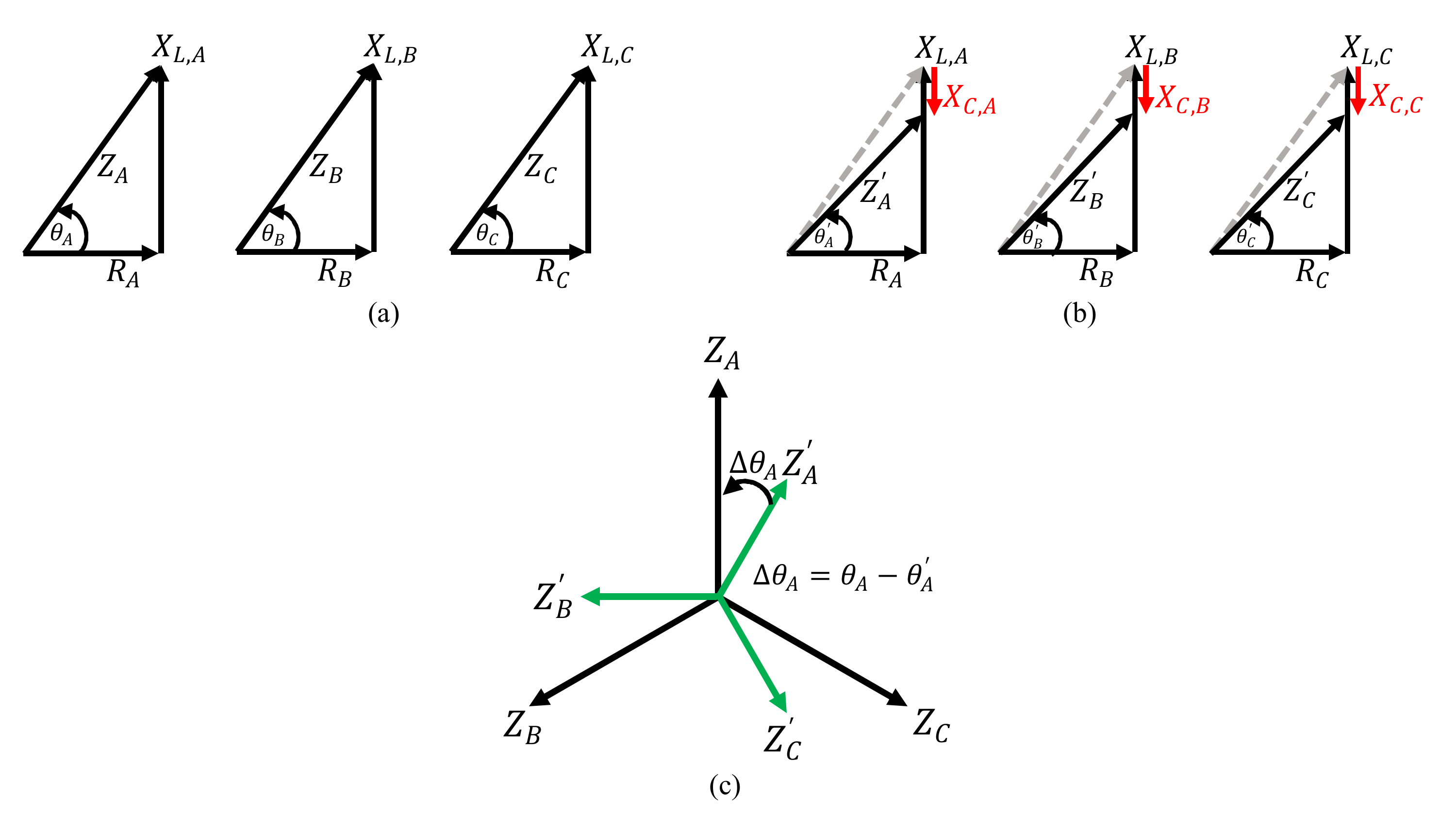
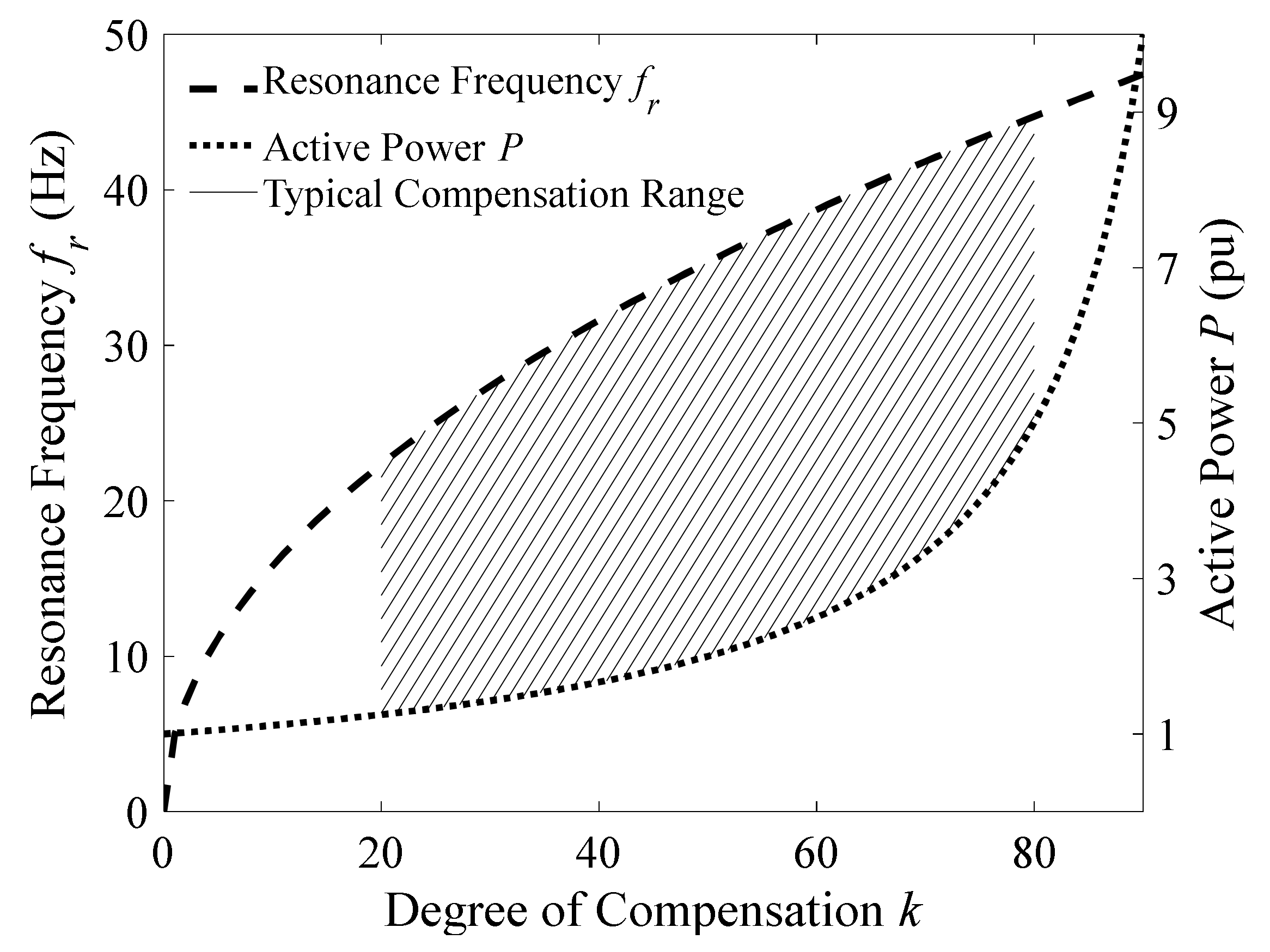
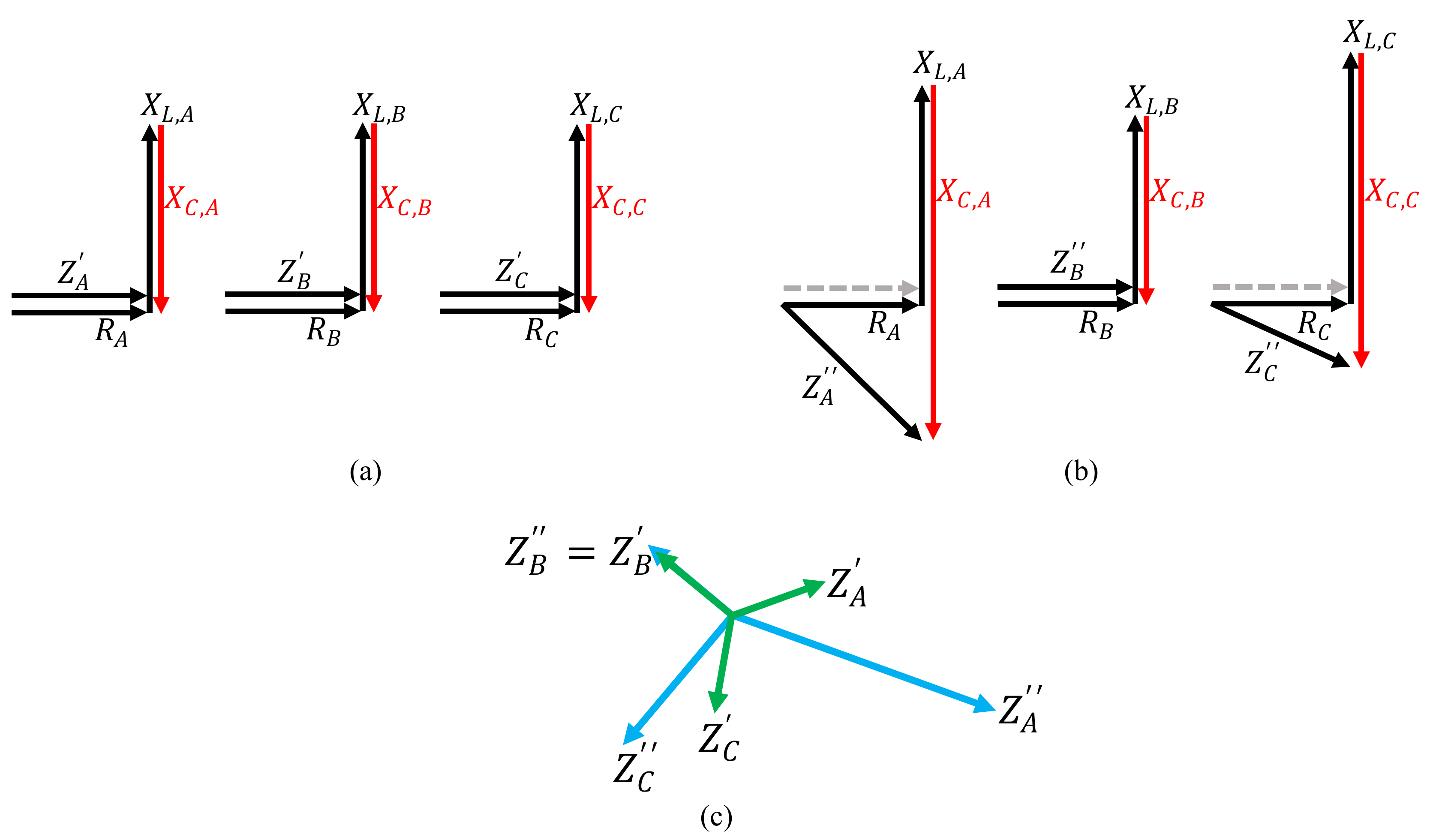
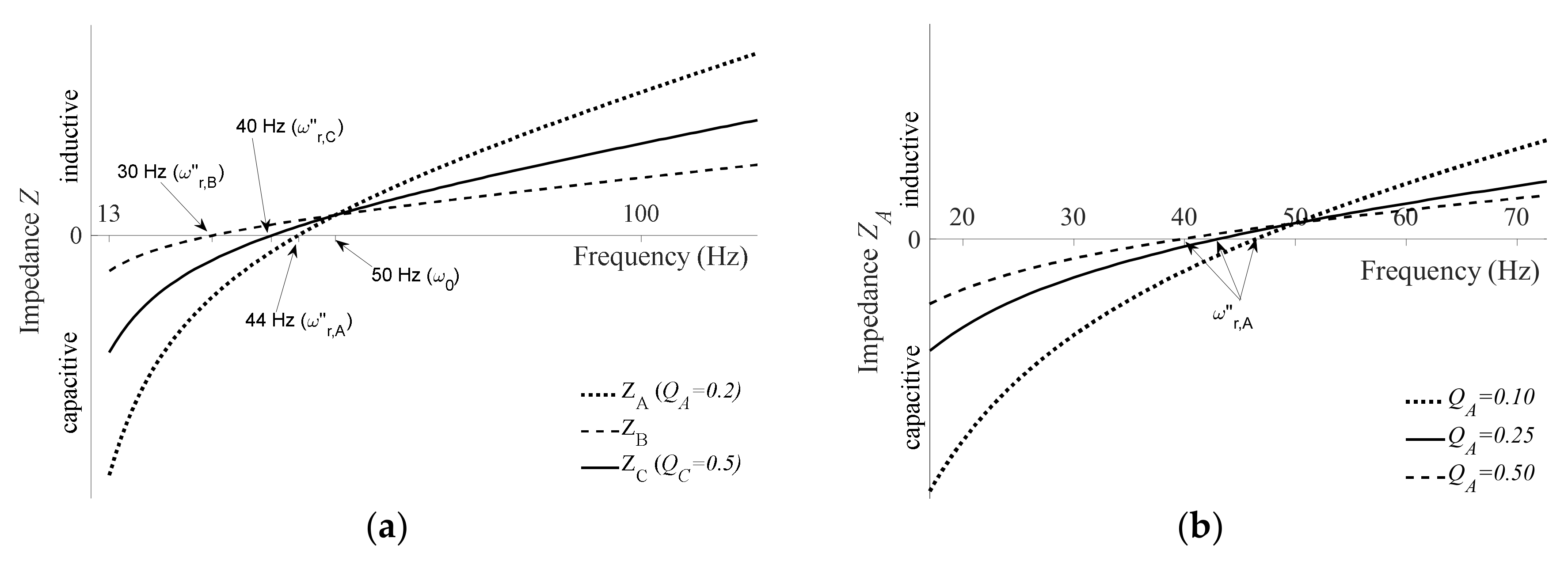
4.2. Developed Analytical Model for Phase Imbalace Compensation
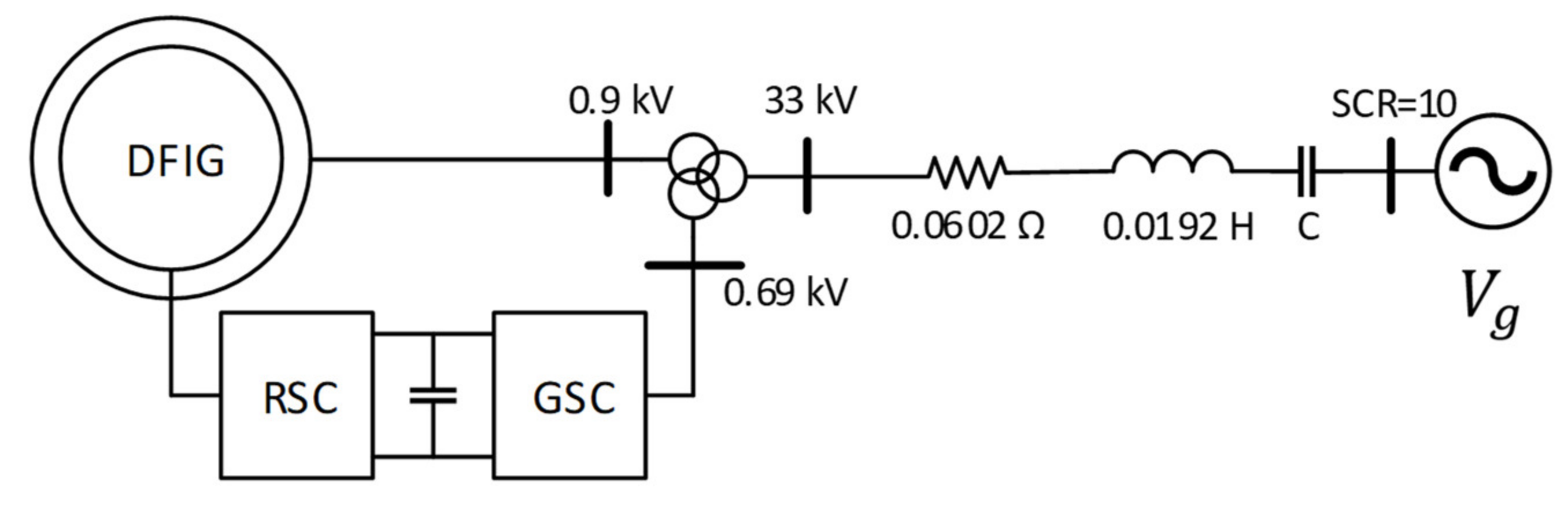
4.3. Development of the Power System Model and DFIG Model
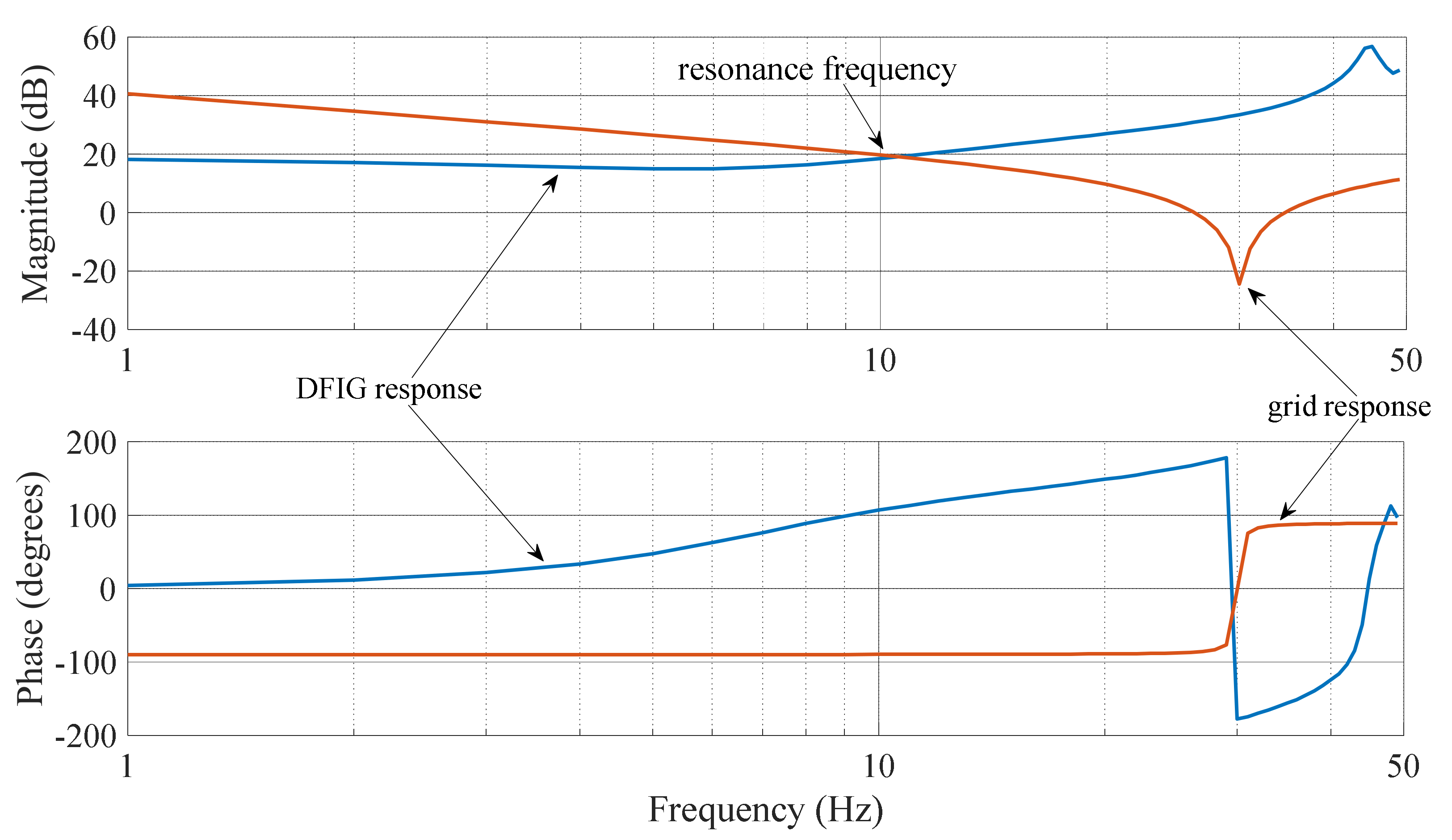
4.4. PIC Evaluation for DFIG-SSR Mitigation
4.5. Mitigating Torsional SSR with PIC
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| GENERATOR | |
| Machine rating | 4 MVA |
| Nominal system frequency | 50 Hz |
| Rated voltage | 0.9 kV |
| Stator leakage inductance | 0.10 p.u. |
| Rotor leakage inductance | 0.11 p.u. |
| Magnetizing inductance | 4.5 p.u. |
| Stator resistance | 0.0054 p.u. |
| Rotor resistance | 0.00607 p.u. |
| Stator/rotor turns ratio | 0.391 |
| Angular moment of inertia | 6 s |
| Drive train stiffness | 200 p.u. |
| Drive train damping | 1.7 p.u. |
| CONVERTER | |
| , , , | 5, 1, 1.2, 1.2 |
| , , , | 0.05, 0.1, 0.02, 0.02 |
| , , , | 0.2, 0.3, 1.5, 2 |
| , , , | 0.5, 0.06, 0.02, 0.02 |
References
- Sewdien, V.N.; Wang, X.; Rueda Torres, J.L.; van der Meijden, M. Critical Review of Mitigation Solutions for SSO in Modern Transmission Grids. Energies 2020, 13, 3449. [Google Scholar] [CrossRef]
- Adams, J.; Carter, C.; Huang, S.H. ERCOT experience with Sub-synchronous Control Interaction and proposed remediation. In Proceedings of the IEEE Power Engineering Society Transmission and Distribution Conference, Orlando, FL, USA, 7–10 May 2012; pp. 1–5. [Google Scholar]
- Pourbeik, P.; Koessler, R.J.; Dickmander, D.L.; Wong, W. Integration of Large Wind Farms into Utility Grids (Part 2—Performance Issues). In Proceedings of the 2003 IEEE Power Engineering Society General Meeting, Conference Proceedings, Toronto, ON, Canada, 13–17 July 2003; Volume 3, pp. 1520–1525. [Google Scholar]
- Song, Y.; Wang, X.; Blaabjerg, F. Impedance-Based High-Frequency Resonance Analysis of DFIG System in Weak Grids. IEEE Trans. Power Electron. 2017, 32, 3536–3548. [Google Scholar] [CrossRef]
- Vieto, I.; Sun, J. Damping of subsynchronous resonance involving Type-III wind turbines. In Proceedings of the 2015 IEEE 16th Workshop on Control and Modeling for Power Electronics, COMPEL 2015, Vancouver, BC, Canada, 12–15 July 2015. [Google Scholar]
- Fan, L.; Miao, Z. Nyquist-stability-criterion-based SSR explanation for type-3 wind generators. IEEE Trans. Energy Convers. 2012, 27, 807–809. [Google Scholar] [CrossRef]
- Vieto, I.; Sun, J. Impedance modeling of doubly-fed induction generators. In Proceedings of the 2015 17th European Conference on Power Electronics and Applications, EPE-ECCE Europe 2015, Geneva, Switzerland, 8–10 September 2015. [Google Scholar]
- Edris, A.-A. Series compensation schemes reducing the potential of subsynchronous resonance. IEEE Trans. Power Syst. 1990, 5, 219–226. [Google Scholar] [CrossRef]
- Edris, A.A. Subsynchronous resonance countermeasure using phase imbalance. IEEE Trans. Power Syst. 1993, 8, 1438–1447. [Google Scholar] [CrossRef]
- Rai, D.; Ramakrishna, G.; Faried, S.O.; Edris, A.A. Enhancement of power system dynamics using a phase imbalanced series compensation scheme. IEEE Trans. Power Syst. 2010, 25, 966–974. [Google Scholar] [CrossRef]
- Rai, D.; Faried, S.O.; Ramakrishna, G.; Edris, A.A. Damping inter-area oscillations using phase imbalanced series compensation schemes. IEEE Trans. Power Syst. 2011, 26, 1753–1761. [Google Scholar] [CrossRef]
- Karaagac, U.; Faried, S.O.; Mahseredjian, J.; Edris, A.A. Coordinated Control of Wind Energy Conversion Systems for Mitigating Subsynchronous Interaction in DFIG-Based Wind Farms. IEEE Trans. Smart Grid 2014, 5, 2440–2449. [Google Scholar] [CrossRef]
- Andersen, B.; Nilsson, S. (Eds.) Flexible AC Transmission Systems; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Ängquist, L.; Ingeström, G.; Jönsson, H.-Å. Dynamic Performance of TCSC Schemes. In Proceedings of the Proceedings of the 1996 CIGRE Session, Paris, France, 14–30 February 1996. [Google Scholar]
- Piyasinghe, L.; Miao, Z.; Khazaei, J.; Fan, L. Impedance model-based SSR analysis for TCSC compensated type-3 wind energy delivery systems. IEEE Trans. Sustain. Energy 2015, 6, 179–187. [Google Scholar] [CrossRef]
- Zhang, X.; Xie, X.; Shair, J.; Liu, H.; Li, Y.; Li, Y. A Grid-side Subsynchronous Damping Controller to Mitigate Unstable SSCI and its Hardware-in-the-loop Tests. IEEE Trans. Sustain. Energy 2020, 11, 1548–1558. [Google Scholar] [CrossRef]
- Khazaei, J.; Asrari, A.; Idowu, P.; Shushekar, S. Sub-Synchronous Resonance Damping using Battery Energy Storage System. In Proceedings of the 2018 North American Power Symposium (NAPS), Fargo, ND, USA, 9–11 September 2018; pp. 1–6. [Google Scholar]
- Crisci, F.; Gomes, P.; Li, B.; Sattinger, W.; Fang, Y.; Roggatz, C.; Lewis, S.; Porwal, R.; Giannuzzi, G.; Zaotini, R.; et al. Power System Restoration—World Practices & Future Trends. CIGRE Sci. Eng. J. 2019, 14, 6–22. [Google Scholar]
- Miller, J.; Brunet-watson, M.; Leighfield, J. Review of Series Compensation for Transmission Lines; PSC North America: Westborough, MA, USA, 2014. [Google Scholar]
- Wang, L.; Xie, X.; Jiang, Q.; Liu, H.; Li, Y.; Liu, H. Investigation of SSR in Practical DFIG-Based Wind Farms Connected to a Series-Compensated Power System. IEEE Trans. Power Syst. 2015, 30, 2772–2779. [Google Scholar] [CrossRef]
- IEEE Subsynchronous Resonance Working Group. First benchmark model for computer simulation of subsynchronous resonance. IEEE Trans. Power Appar. Syst. 1977, 96, 1565–1572. [Google Scholar] [CrossRef]
- Zhao, H.; Liu, F.; Zhang, H.; Liang, Z. Research on a learning rate with energy index in deep learning. Neural Netw. 2019, 110, 225–231. [Google Scholar] [CrossRef] [PubMed]
- Xie, X.; Liu, W.; Liu, H.; Du, Y.; Li, Y. A system-wide protection against unstable SSCI in series-compensated wind power systems. IEEE Trans. Power Deliv. 2018, 33, 3095–3104. [Google Scholar] [CrossRef]
- Li, P.; Xiong, L.; Wu, F.; Ma, M.; Wang, J. Sliding mode controller based on feedback linearization for damping of sub-synchronous control interaction in DFIG-based wind power plants. Electr. Power Energy Syst. 2019, 107, 239–250. [Google Scholar] [CrossRef]
- Zhao, S.; Wang, N.; Li, R.; Gao, B.; Shao, B.; Song, S. Sub-synchronous control interaction between direct-drive PMSG-based wind farms and compensated grids. Electr. Power Energy Syst. 2019, 109, 609–617. [Google Scholar] [CrossRef]
- IEC. International Standard 61400-27-1: Wind Turbines—Part 27-1: Electrical Simulation Models—Wind Turbines; IEC: Geneva, Switzerland, 2015. [Google Scholar]
- TenneT. H2020 Project MIGRATE Website. Available online: https://www.h2020-migrate.eu/ (accessed on 3 July 2020).
- MIGRATE. MIGRATE Project Type 3 and Type 4 EMT Model Documentation; MHRC: Winnipeg, MB, Canada, 2017. [Google Scholar]
- Wang, T.C.Y.; Ye, Z.; Sinha, G.; Yuan, X. Output filter design for a grid-interconnected three-phase inverter. In Proceedings of the PESC Record—IEEE Annual Power Electronics Specialists Conference, Acapulco, Mexico, 15–19 June 2003; Volume 2, pp. 779–784. [Google Scholar]
- Badrzadeh, B.; Sahni, M.; Zhou, Y.; Muthumuni, D.; Gole, A. General methodology for analysis of sub-synchronous interaction. IEEE Trans. Power Syst. 2013, 28, 1858–1869. [Google Scholar] [CrossRef]
- Haupt, R.L.; Haupt, S.E. Practical Genetic Algorithms; Wiley-Interscience: New York, NY, USA, 1998. [Google Scholar]
- PSCAD. USER’S GUIDE on the Use of PSCAD; PSCAD: Winnipeg, MB, Canada, 2018. [Google Scholar]
- Jiang, H.; Song, R.; Du, N.; Zhou, P.; Zheng, B.; Han, Y.; Yang, D. Application of UPFC to mitigate SSR in series-compensated wind farms. J. Eng. 2019, 2019, 2505–2509. [Google Scholar] [CrossRef]
- Tran, M.Q.; Dinh, M.C.; Lee, S.J.; Lee, J.I.; Park, M.; Lee, C.H.; Yoon, J.S. Analysis and mitigation of subsynchronous resonance in a Korean power network with the first TCSC installation. Energies 2019, 12, 2847. [Google Scholar] [CrossRef]













| Q | ||
|---|---|---|
| Classical Compensation | 10 | 0.214 |
| 0.1 | 20 | 0.383 |
| 0.2 | 16 | 0.368 |
| 0.5 | 14 | 0.279 |
| 2.5 | 13 | 0.231 |
| 5.0 | 12 | 0.226 |
| Wind Speed (m/s) | ||
| 5 | 6 | 41 |
| 6 | 6.5 | 41.25 |
| 7 | 7 | 41.5 |
| 8 | 7.5 | 42 |
| 9 | 8 | 43 |
| 10 | 8 | 43 |
| 15 | 9.8 | 43 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sewdien, V.; Rueda Torres, J.L.; van der Meijden, M. Evaluation of Phase Imbalance Compensation for Mitigating DFIG-Series Capacitor Interaction. Energies 2020, 13, 4512. https://doi.org/10.3390/en13174512
Sewdien V, Rueda Torres JL, van der Meijden M. Evaluation of Phase Imbalance Compensation for Mitigating DFIG-Series Capacitor Interaction. Energies. 2020; 13(17):4512. https://doi.org/10.3390/en13174512
Chicago/Turabian StyleSewdien, Vinay, Jose Luis Rueda Torres, and Mart van der Meijden. 2020. "Evaluation of Phase Imbalance Compensation for Mitigating DFIG-Series Capacitor Interaction" Energies 13, no. 17: 4512. https://doi.org/10.3390/en13174512
APA StyleSewdien, V., Rueda Torres, J. L., & van der Meijden, M. (2020). Evaluation of Phase Imbalance Compensation for Mitigating DFIG-Series Capacitor Interaction. Energies, 13(17), 4512. https://doi.org/10.3390/en13174512