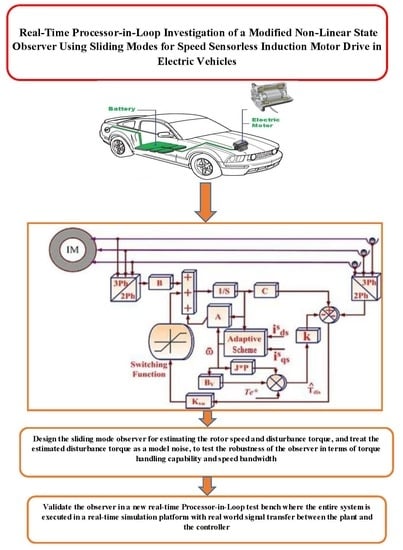
Real-Time Processor-in-Loop Investigation of a Modified Non-Linear State Observer Using Sliding Modes for Speed Sensorless Induction Motor Drive in Electric Vehicles

 , ,
, ,  ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
1. Introduction
- Very few cater to the handling of measurement and model disturbances and their effects on the steady state and dynamic performance of the drive.
- Existing disturbance observers have short comings in terms of speed bandwidth, parameter estimation, torque profile and stability issues.
- Although many have been validated in an offline simulation platform, some in an experimental test bench, none of them have been tested in a real-time PIL test bench (which is an intermediate between offline simulation and full hardware verification).
- By effective placement of the estimated disturbance torque in the proposed observer state dynamic equation, greater handling of the disturbance is seen as compared to the other disturbance observer whose tracking performance is affected. The speed bandwidth is increased and the torque holding capacity is also good. It is comparatively more stable and the dame has been analyzed through the pole placement technique.
- Furthermore, in a new real-time PIL platform, the plant and the controller are made to interact through digital and analog I/O cards by providing a real-time link. This testing is based on a model based design paradigm and has not been performed in the existing literature.
2. Basic Principle of MRAS and Structure of the SMLO
2.1. Motor Model (Reference)
2.2. Disturbance Torque Estimation
2.3. SMLO1
2.4. SMLO2
2.5. Adaptive Mechanism with LFC
2.6. Stability Analysis by the Pole Placement Technique—SMLO1 and SMLO2
3. Indirect Vector Control Strategy—Mathematical Structure
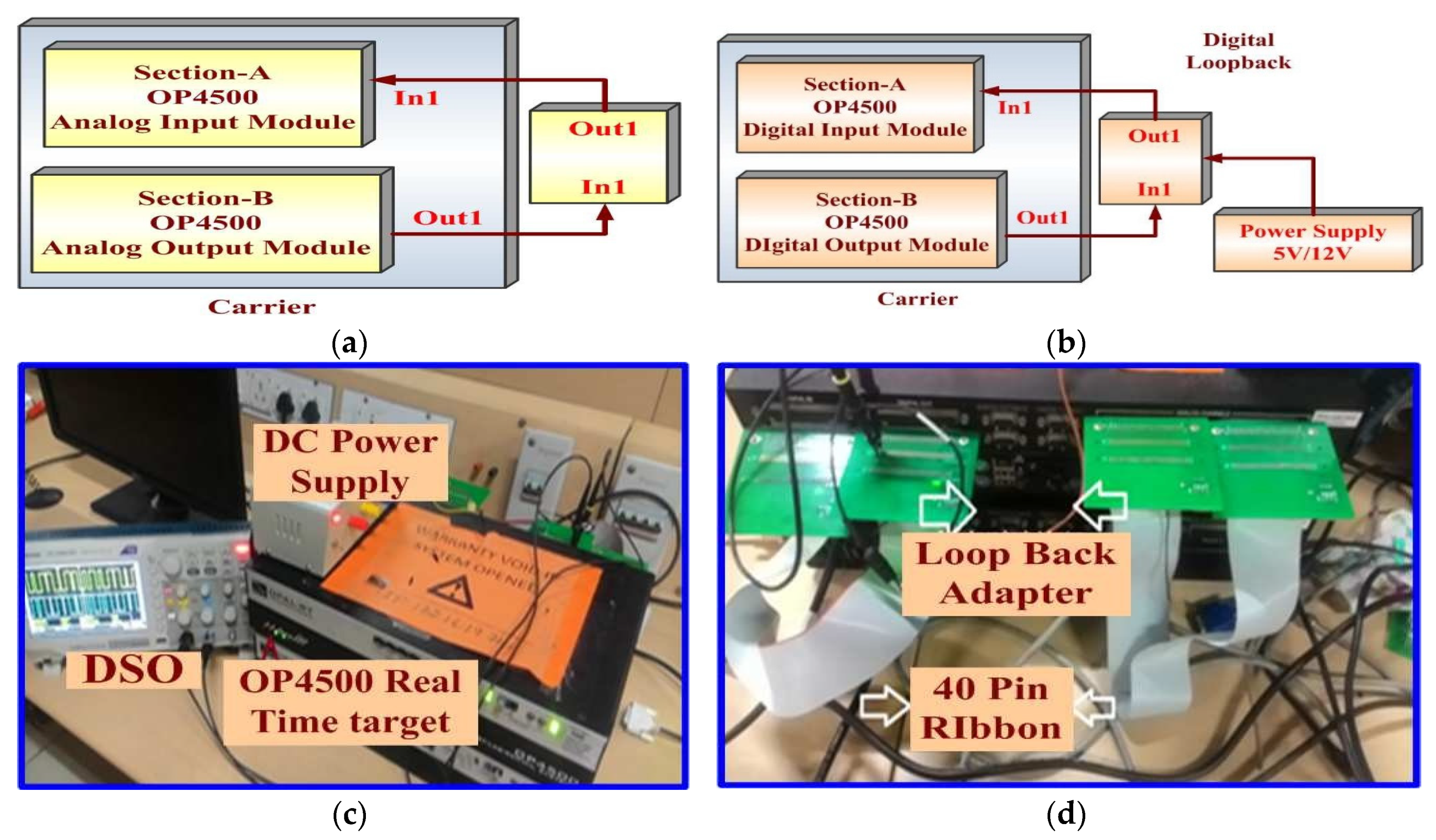
4. RT-Lab Based PIL Test Bench
5. Results (Real-Time Simulation and PIL Based Validation): Analysis and Discussion
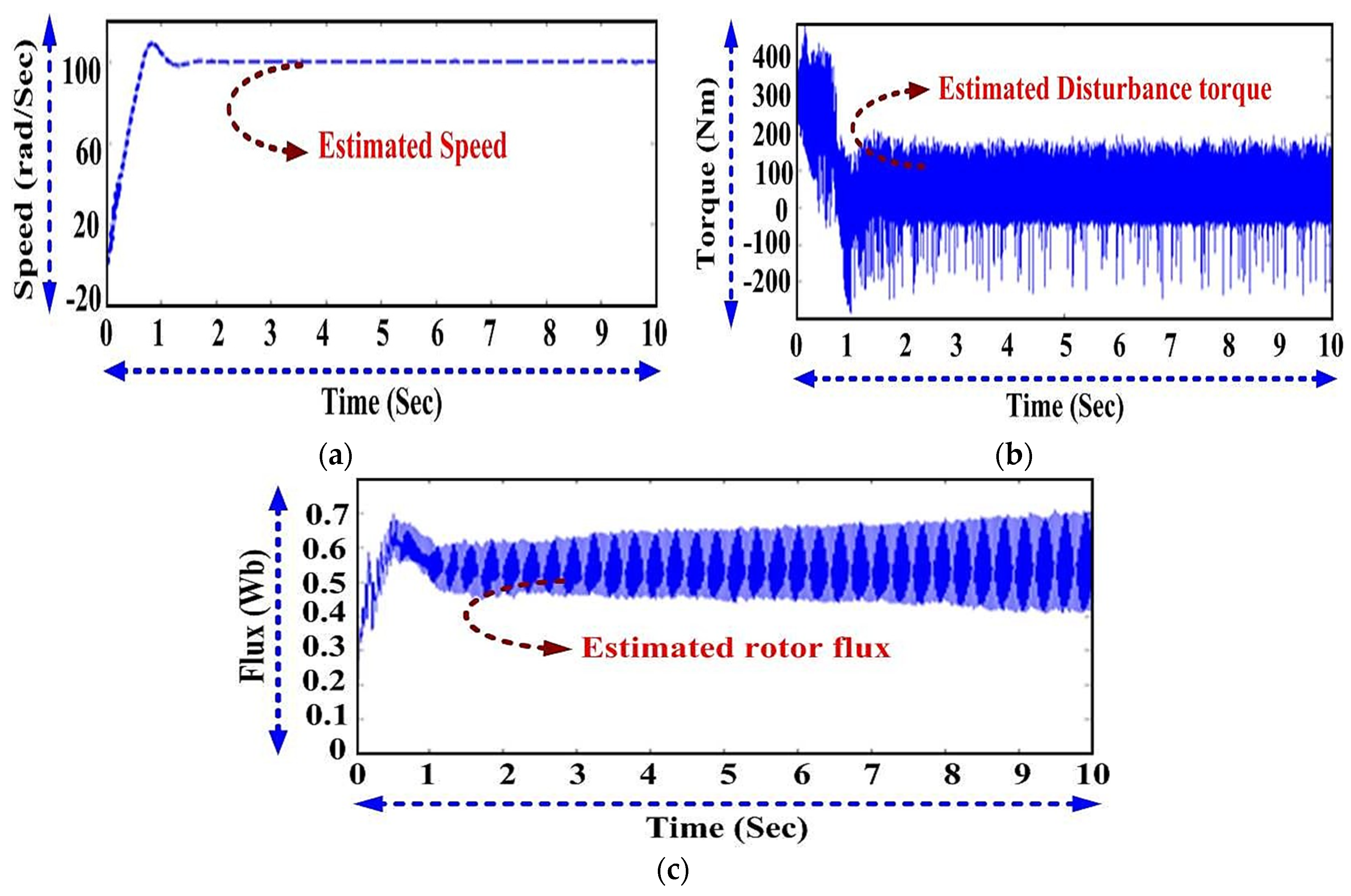
5.1. A Constant Speed Reference of 100 rad/s with a Constant Load Perturbation of 100 Nm
5.1.1. SMLO1
5.1.2. SMLO2
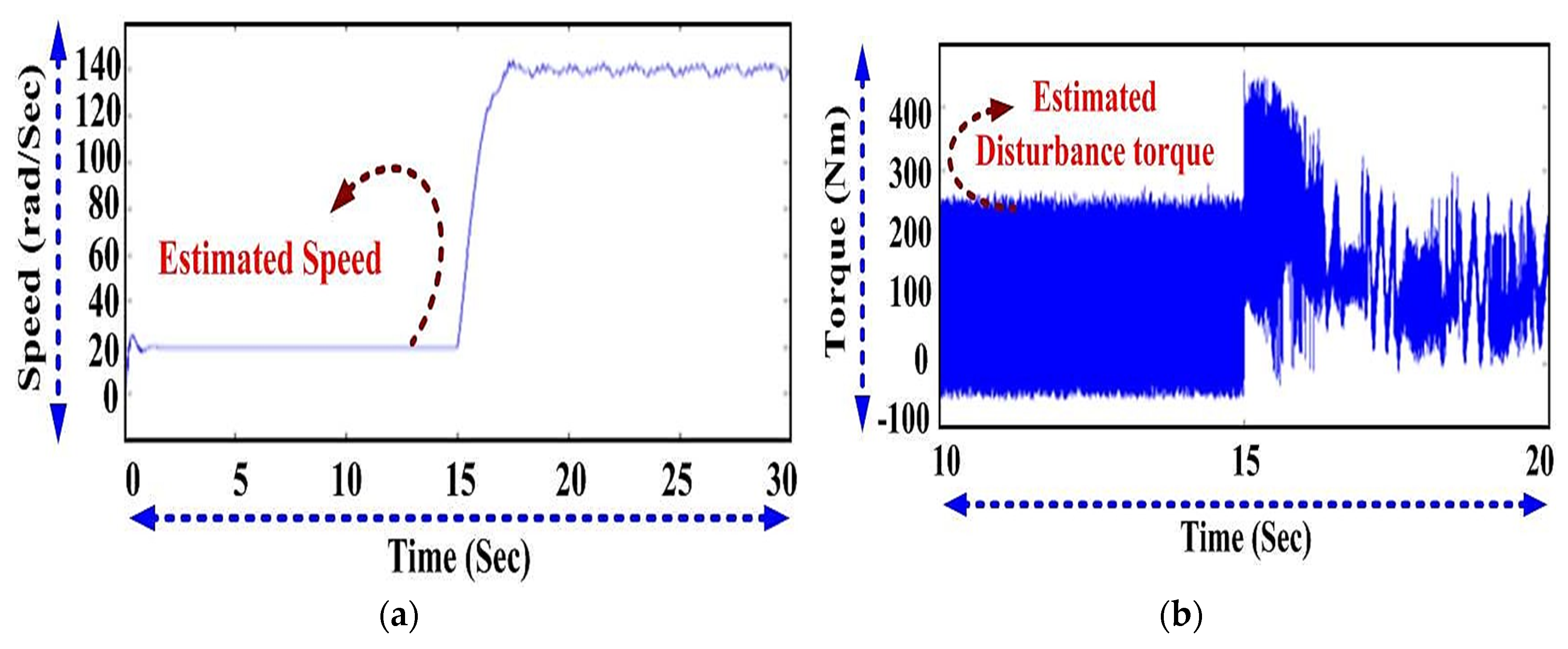
5.2. A Constant Speed Reference of 100 rad/s with a Step Load Perturbation (Initially at 5 Nm, after a Fixed Time Interval of 15 s, Stepped up to 200 Nm)
5.2.1. SMLO1
5.2.2. SMLO2
5.3. A Step Speed Reference with a Constant Load Perturbation of 100 Nm
5.3.1. SMLO1
5.3.2. SMLO2
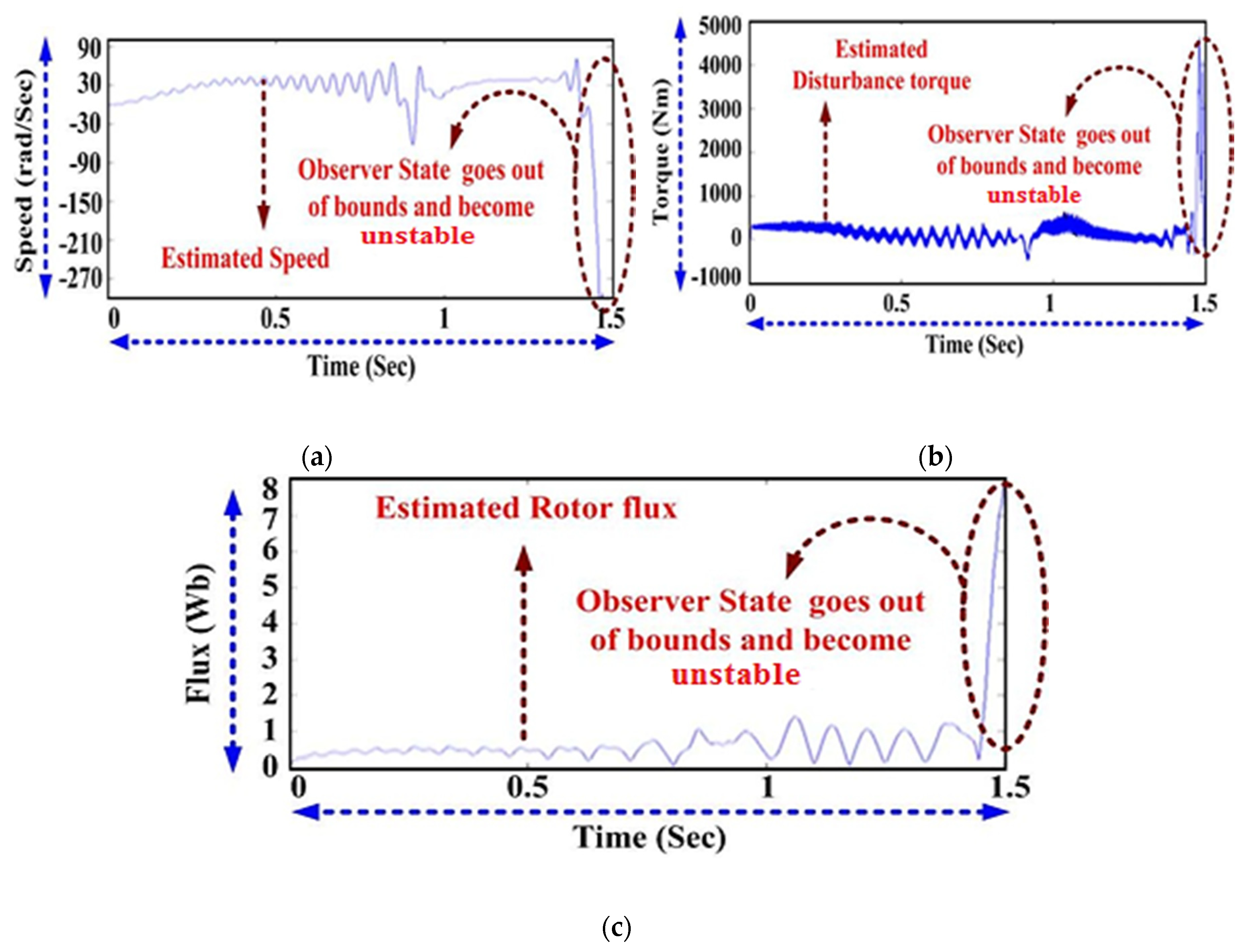
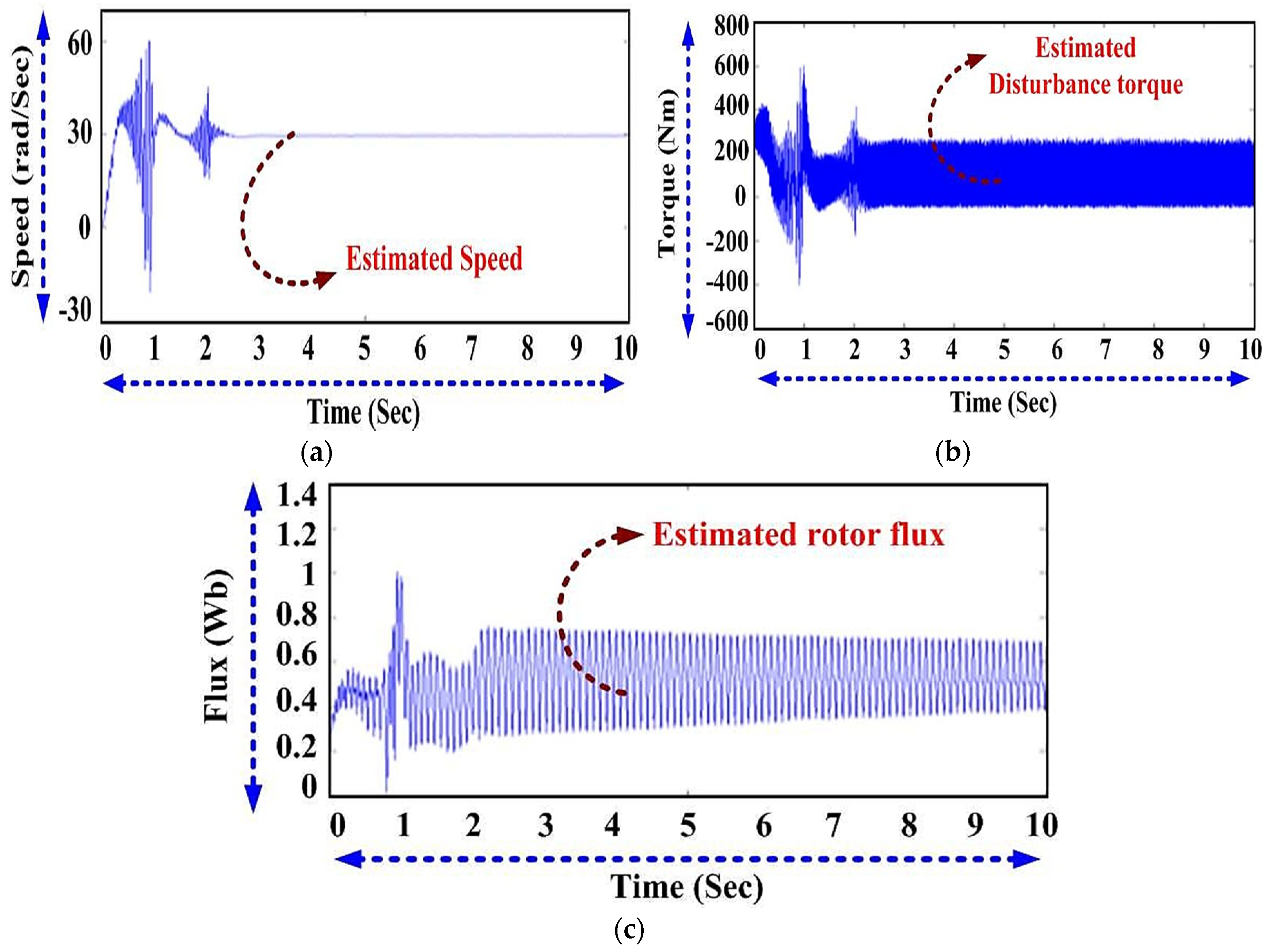
5.4. Low Speed Command of 30 rad/s with a Constant Load Perturbation of 100 Nm
5.4.1. SMLO1
5.4.2. SMLO2
Analysis Case 1: Real Time Simulation with Processor-in-Loop Validation
Analysis Case 2: Real Time Simulation without Processor-in-Loop Validation
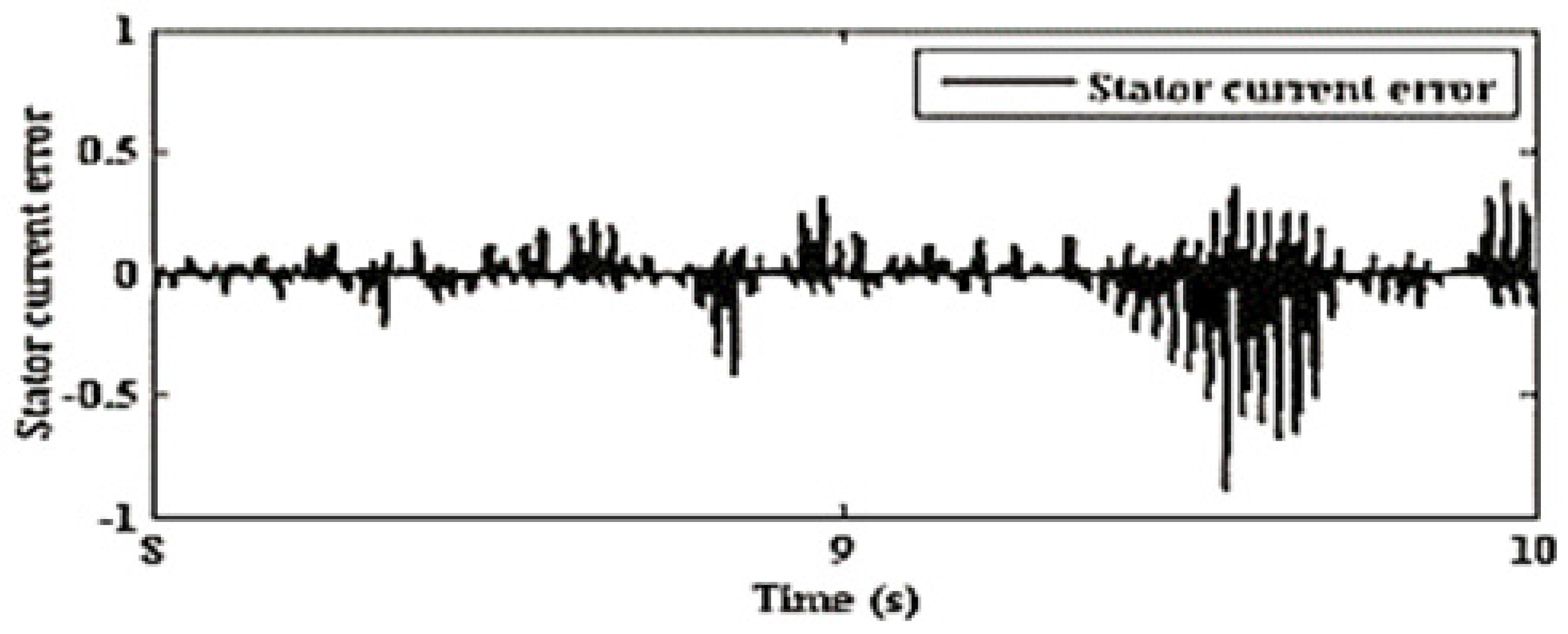
5.4.3. SMLO1 and SMLO2 Stator Current Error Convergence
5.5. Estimated Speed Waveforms for a Constant Load Perturbation of 100 Nm as Recorded in Digital Storage Oscilloscope
6. Conclusions
- The purpose of validating the same in a Processor-in-Loop platform is to introduce a real-world signal routing and interaction where the system is placed virtually in the front end.
- The dynamic performance can be treated almost on par with an actual physical system with precise timing requirements.
- SMLO2 displays better performance at low speed regions (less than 70 rps), particularly in terms of tracking, better disturbance handling and stability.
- It also has increased speed bandwidth (20–150 rps) and reduced speed oscillations at lower speeds (20–30 rps).
- The proposed method (SMLO2) would be more ideal for the EV to address the issue of range anxiety. It also delivers considerably better dynamic performance and able to handle disturbances better.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| idss, iqss, idrr, iqrr | d- and q-axis stator and rotor currents in the stationary and rotating reference |
| vdss, vqss | d- and q-axis stator voltages in stationary reference |
| Tr, Rs, Rr | Rotor time constant, stator and rotor resistance |
| σ, Lr, Lm, Ls | Leakage reactance, rotor, magnetizing and stator self inductance |
| Lls, Llr | Stator and rotor leakage inductances |
| Actual, estimated, reference and base synchronous speed | |
| ψdss, ψqss, ψdrs, ψqrs | d and q axes stator and rotor flux linkages in stationary reference |
| d and q axes estimated rotor flux linkages | |
| Field angle, slip angle and rotor angle | |
| d and q axes stator currents in synchronously rotating reference | |
| Three phase reference currents |
References
- Tomislav, S.; Siegfried, S.; Wolfgang, G. The Flux-Based Sensorless Field-Oriented Control of Permanent Magnet Synchronous Motors without Integrational Drift. Actuators 2018, 7, 1–22. [Google Scholar]
- Tsuji, M.; Chen, S.; Izumi, K.; Yamada, E. A Sensorless Vector Control System for Induction Motors Using q-Axis Flux with Stator Resistance Identification. IEEE Trans. Ind. Electron. 2001, 48, 185–194. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Y.C.; Ge, X. Sliding-mode observer-based speed-sensorless vector control of linear induction motor with a parallel secondary resistance online identification. IET. Electr. Power Appl. 2018, 12, 1215–1224. [Google Scholar] [CrossRef]
- Hosseyni, A.; Trabelsi, R.; Mimouni, M.F.; Iqbal, A.; Padmanaban, S. Novel Sensorless Sliding Mode Observer of a Five-Phase Permanent Magnet Synchronous Motor Drive in Wide Speed Range. Lect. Notes Electr. Eng. 2017, 436, 213–220. [Google Scholar]
- Hosseyni, A.; Trabelsi, R.; Iqba, A.; Padmanaban, S.; Mimouni, M. An Improved Sensorless Sliding Mode Control/ Adaptive Observer of a Five-Phase Permanent Magnet Synchronous Motor Drive. Int. J. Adv. Manuf. Tech. 2017, 93, 1029–1039. [Google Scholar] [CrossRef]
- Krishna, S.M.; Daya, J.L.F. Effect of Parametric variations and Voltage Unbalance on Adaptive Speed Estimation Schemes for Speed Sensorless Induction Motor Drives. Int. J. Power Electron. Drives. 2015, 6, 77–85. [Google Scholar] [CrossRef]
- Ali Karami, M.; Hamed, T. Estimation of load torque in induction motors via dynamic sliding mode control and new nonlinear state observer. J. Mech. Sci. Technol. 2018, 32, 2283–2288. [Google Scholar] [CrossRef]
- Alexander, I.K.; Alexey, A.E.; Dmitriy, V.S.; Yuriy, N.K. An Approach of the Wavelet-Fuzzy Controller of Vector Control System by the Induction Motor. In Proceedings of the IEEE International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon), Vladivostok, Russia, 3–4 October 2018; pp. 1–6. [Google Scholar]
- Ho, T.J.; Chang, C.H. Robust Speed Tracking of Induction Motors: An Arduino-Implemented Intelligent Control Approach. Appl. Sci. 2018, 8, 159. [Google Scholar] [CrossRef]
- Zhao, X.; Yu, Q.; Yu, M.; Tang, Z. Research on an equal power allocation electronic differential system for electric vehicle with dual-wheeledmotor front drive based on a wavelet controller. Adv. Mech. Eng. 2018, 10, 1–24. [Google Scholar] [CrossRef]
- Bouhoune, K.; Yazid, K.; Boucherit, M.S.; Chriti, A. Hybrid control of the three phase induction machine using artificial neural networks and fuzzy logic. Appl. Soft Comput. 2017, 55, 289–301. [Google Scholar] [CrossRef]
- Daya, J.L.F.; Padmanaban, S.; Blaabjerg, F.; Wheeler, P.; Ojo, O. Implementation of Wavelet Based Robust Differential Control for Electric Vehicle Application. IEEE Trans. Power Electr. 2015, 30, 6510–6513. [Google Scholar] [CrossRef]
- Chekroun, S.; Zerikat, M.; Mechernene, A.; Benharir, N. Novel Observer Scheme of Fuzzy-MRAS Sensorless Speed Control of Induction Motor Drive. J. Phys. Conf. 2017, 783, 1–13. [Google Scholar] [CrossRef]
- Lamia, Y.; Sebti, B.; Farid, N.; Mihai, C.; Luis Guasch, P. Design of an Adaptive Fuzzy Control System for Dual Star Induction Motor Drives. Adv. Electr. Comput. Eng. 2018, 18, 37–44. [Google Scholar]
- Krisztián, H.; Márton, K. Speed sensorless field oriented control of induction machines using unscented Kalman filter. In Proceedings of the International Conference on Optimization of Electrical and Electronic Equipment (OPTIM) & Intl Aegean Conference on Electrical Machines and Power Electronics (ACEMP), Brasov, Romania, 25–27 May 2017; pp. 523–528. [Google Scholar]
- Bo, F.; Zhumu, F.; Leipo, L.; Jiangtao, F. The full-order state observer speed-sensorless vector control based on parameters identification for induction motor. Meas. Control 2019, 52, 202–211. [Google Scholar]
- Ali, H.; Rachid, D.; Othman, H. A New Direct Speed Estimation and Control of the Induction Machine Benchmark: Design and Experimental Validation. Math. Probl. Eng. 2018, 2018, 1–10. [Google Scholar]
- Krishna, S.M.; Daya, J.L.F.; Padmanaban, S.; Mihet-Popa, L. Real-time Analysis of a Modified State Observer for Sensorless Induction Motor Drive used in Electric Vehicle Applications. Energies 2017, 10, 1077. [Google Scholar] [CrossRef]
- Youssef, A.; Mabrouk, J.; Yassine, K.; Boussak, M. A Very-Low-Speed Sensorless Control Induction Motor Drive with Online Rotor Resistance Tuning by Using MRAS Scheme. Power Electron. Drives 2019, 4, 125–140. [Google Scholar]
- Abderrahim, B.; Sandeep, B.; Mustapha, J.; Adil, E.; Mohammed, A. Real Time High Performance of Sliding Mode Controlled Induction Motor Drives. Procedia Comput. Sci. 2018, 132, 971–982. [Google Scholar]
- Kandoussi, Z.; Boulghasoul, Z.; Elbacha, A.; Tajer, A. Real time implementation of a new fuzzy-sliding-mode-observer for sensorless IM drive. COMPEL 2017, 36, 938–958. [Google Scholar] [CrossRef]
- Ilten, E.; Demirtas, M. Fractional order super-twisting sliding mode observer for sensorless control of induction motor. COMPEL 2019, 38, 878–892. [Google Scholar] [CrossRef]
- Tang, J.; Yang, Y.; Blaabjerg, F.; Chen, J.; Diao, L.; Liu, Z. Parameter Identification of Inverter-Fed Induction Motors: A Review. Energies 2018, 11, 2194. [Google Scholar] [CrossRef]
- Krishna, S.M.; Daya, J.L.F. A modified disturbance rejection mechanism in sliding mode state observer for sensorless induction motor drive. Arab. J. Sci. Eng. 2016, 41, 3571–3586. [Google Scholar] [CrossRef]
- Krzeminski, Z. Observer of induction motor speed based on exact disturbance model. In Proceedings of the IEEE 13th International Power Electronics and Motion Control Conference, Poznan, Poland, 1–3 September 2008; pp. 2294–2299. [Google Scholar]
- Albu, M.; Horga, V.; Ratoi, M. Disturbance torque observers for the induction motor drives. J. Electr. Eng. 2006, 6, 1–6. [Google Scholar]
- Slotine, J.J.E.; Li, W. Applied Non Linear Control; Prentice-Hall: Upper Saddle River, NJ, USA, 1991. [Google Scholar]
- Bose, B.K. Power Electronics and Variable Frequency Drives—Technology and Applications; Wiley-IEEE Press: River Street Hoboken, NJ, USA, 2013. [Google Scholar]
- Mikkili, S.; Panda, A.K.; Prattipati, J. Review of Real-Time Simulator and the Steps Involved for Implementation of a Model from MATLAB/SIMULINK to Real-Time. J. Inst. Eng. India Ser. B 2015, 96, 179–196. [Google Scholar] [CrossRef]
- Mossa, M.A.; Echeikh, H.; Iqbal, A.; Duc Do, T.; Al-Sumaiti, A.S. A Novel Sensorless Control for Multiphase Induction Motor Drives Based on Singularly Perturbed Sliding Mode Observer-Experimental Validation. Appl. Sci. 2020, 10, 2776. [Google Scholar] [CrossRef]
- Krishna, S.M.; Daya, J.L.F. Adaptive Speed Observer with Disturbance Torque Compensation for Sensorless Induction Motor Drives using RT-Lab. Turk. J. Electr. Eng. Comput. Sci. 2016, 24, 3792–3806. [Google Scholar] [CrossRef]
- Krishna, S.M.; Daya, J.L.F. MRAS speed estimator with fuzzy and PI stator resistance adaptation for sesnorless induction motor drives using RT-Lab. Perspect. Sci. 2016, 8, 121–126. [Google Scholar] [CrossRef]
- Ali, H.; Olfa, B. Real-Time Low-Cost Speed Monitoring and Control of Three-Phase Induction Motor via a Voltage/Frequency Control Approach. Math. Probl. Eng. 2020, 2020, 1–14. [Google Scholar]
- Amit Kumar, K.S.; Ilamparithi, T.; Prakash, O.; Belanger, J. Hybrid CPU-Core and FPGA based real-time implementation of a high frequency aircraft power system. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Montreal, QC, Canada, 20–24 September 2015; pp. 5425–5430. [Google Scholar]
- Amit Kumar, K.S.; Ilamparithi, T. Real-time studies on an improved modular stacked transmission and distribution system. In Proceedings of the IEEE 16th Workshop on Control and Modeling for Power Electronics (COMPEL), Vancouver, BC, Canada, 12–15 July 2015; pp. 1–8. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Ratings |
|---|---|
| Rated Power | 50 HP |
| Rated Load Torque | 237.4 Nm |
| Rs | 0.087 Ω |
| Rr | 0.228 Ω |
| Lls | 0.8 mH |
| Llr | 0.8 mH |
| Lm | 34.7 mH |
| Inertia, J | 1.662 kg m2 |
| Friction factor | 0.1 |
| Parameters | SMLO1 | SMLO2 (Proposed) |
|---|---|---|
| Medium speeds and near synchronous speed (70–150 rps) | Exhibits good tracking performance | Exhibits good tracking performance |
| Low speeds (<70 rps) | Convergence is affected and does not track well. | Tracks up to 20 rps and considerably better disturbance rejection. |
| Speed oscillations | Has more oscillations even in the steady state region | Comparatively less oscillations |
| Observer stability | Less stable than the proposed observer, due to which the speed bandwidth is reduced. | Proposed observer poles are shifted to the left of the SMLO1, which explains the extended speed bandwidth. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krishna Srinivasan, M.; Daya John Lionel, F.; Subramaniam, U.; Blaabjerg, F.; Madurai Elavarasan, R.; Shafiullah, G.M.; Khan, I.; Padmanaban, S. Real-Time Processor-in-Loop Investigation of a Modified Non-Linear State Observer Using Sliding Modes for Speed Sensorless Induction Motor Drive in Electric Vehicles. Energies 2020, 13, 4212. https://doi.org/10.3390/en13164212
Krishna Srinivasan M, Daya John Lionel F, Subramaniam U, Blaabjerg F, Madurai Elavarasan R, Shafiullah GM, Khan I, Padmanaban S. Real-Time Processor-in-Loop Investigation of a Modified Non-Linear State Observer Using Sliding Modes for Speed Sensorless Induction Motor Drive in Electric Vehicles. Energies. 2020; 13(16):4212. https://doi.org/10.3390/en13164212
Chicago/Turabian StyleKrishna Srinivasan, Mohan, Febin Daya John Lionel, Umashankar Subramaniam, Frede Blaabjerg, Rajvikram Madurai Elavarasan, G. M. Shafiullah, Irfan Khan, and Sanjeevikumar Padmanaban. 2020. "Real-Time Processor-in-Loop Investigation of a Modified Non-Linear State Observer Using Sliding Modes for Speed Sensorless Induction Motor Drive in Electric Vehicles" Energies 13, no. 16: 4212. https://doi.org/10.3390/en13164212
APA StyleKrishna Srinivasan, M., Daya John Lionel, F., Subramaniam, U., Blaabjerg, F., Madurai Elavarasan, R., Shafiullah, G. M., Khan, I., & Padmanaban, S. (2020). Real-Time Processor-in-Loop Investigation of a Modified Non-Linear State Observer Using Sliding Modes for Speed Sensorless Induction Motor Drive in Electric Vehicles. Energies, 13(16), 4212. https://doi.org/10.3390/en13164212