Generalized Fault-Location Scheme for All-Parallel AT Electric Railway System


Abstract
1. Introduction
- To simplify the fault location scheme to match different feeding conditions, we classified the feeding conditions of faulted sections into three types and introduced the corresponding fault location methods, thus we improved the up and down current ratio method, neutral current ratio method and reactance method for long-section feeding conditions.
- To identify the faulted section and its feeding condition, we first formed a switch state matrix based on the adjacency matrix and mapped the fault current distribution into a current state matrix, then we unified the two matrices into a fault state matrix to reflect the fault state of AARS.
- To achieve accurate fault location in each of the feeding conditions, we proposed a generalized fault location scheme combining the fault location method and fault identification.
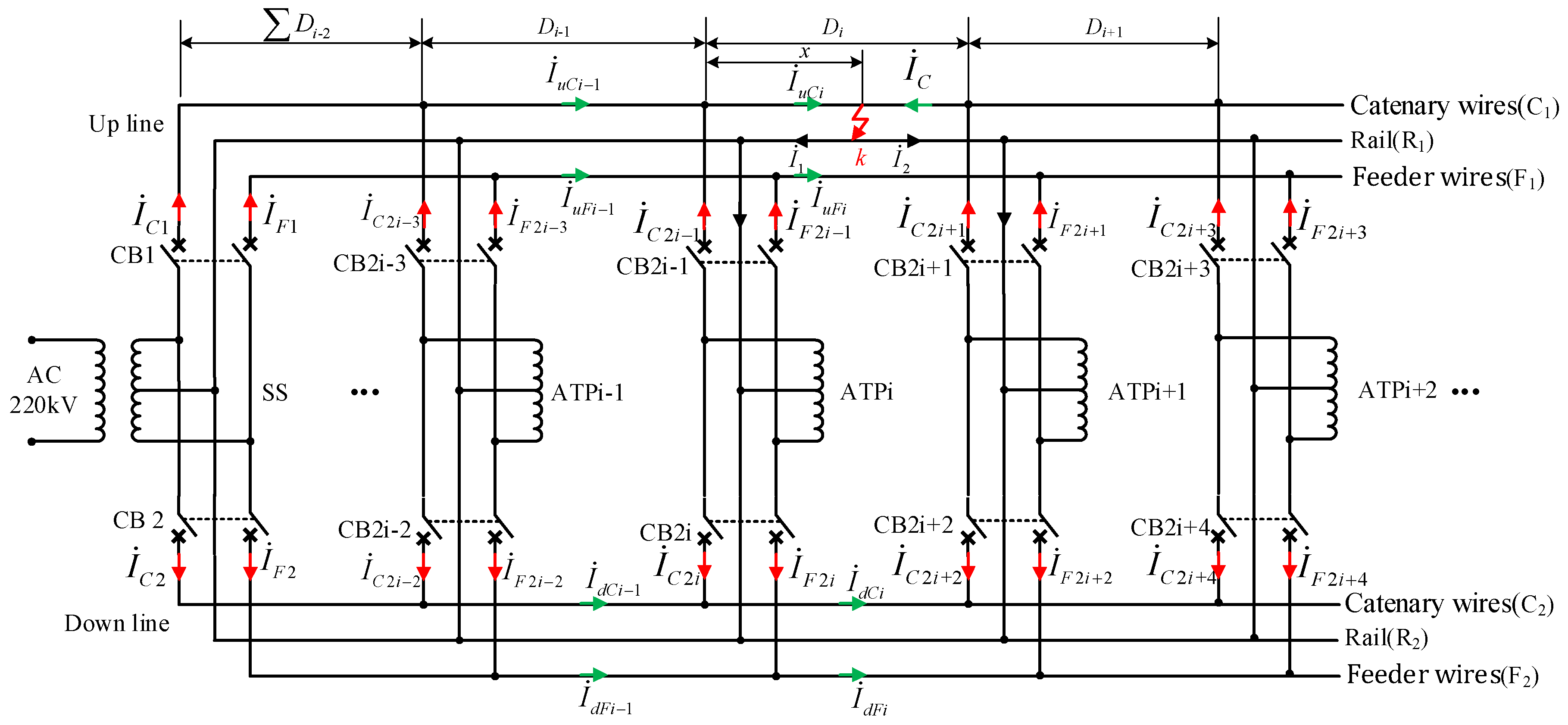
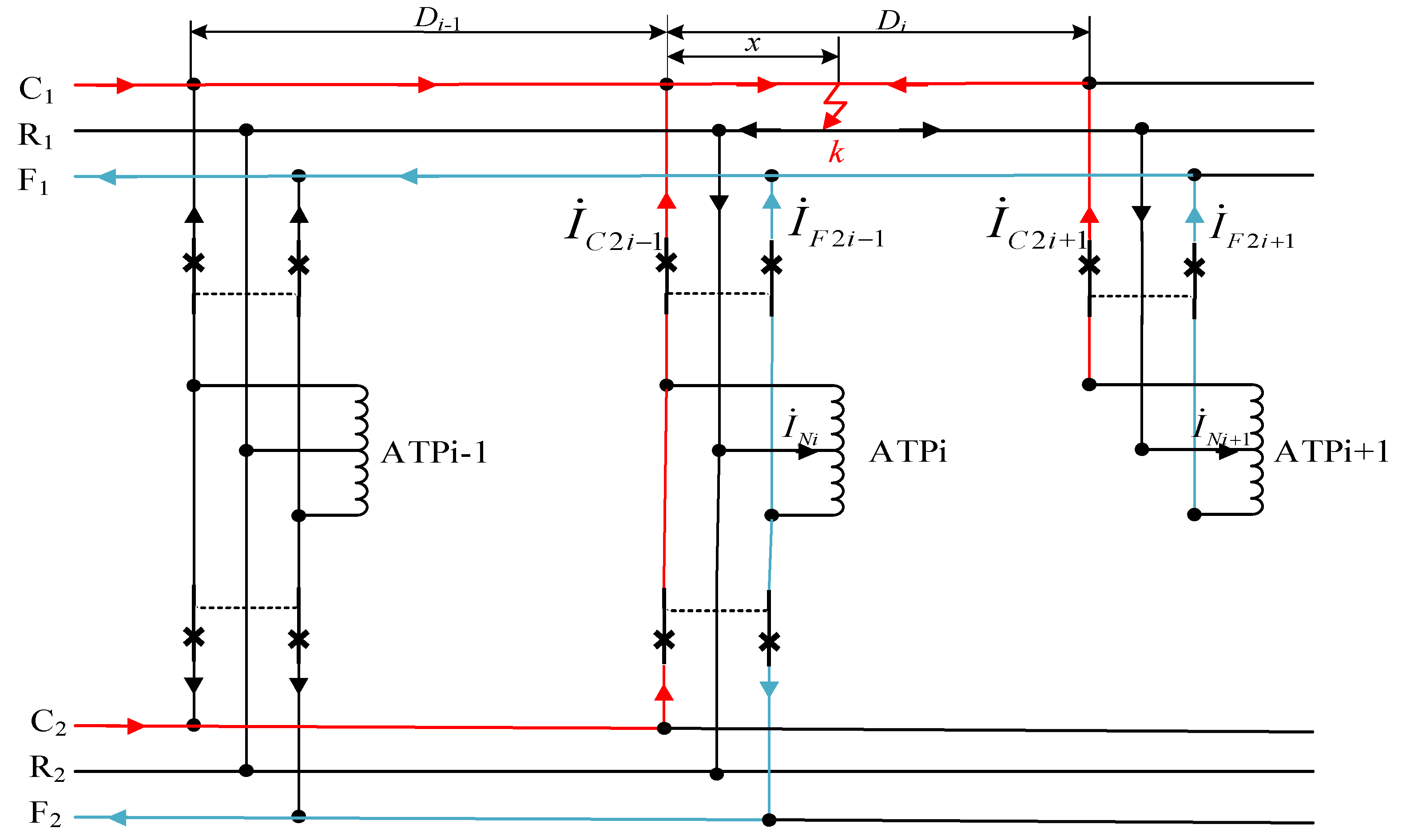
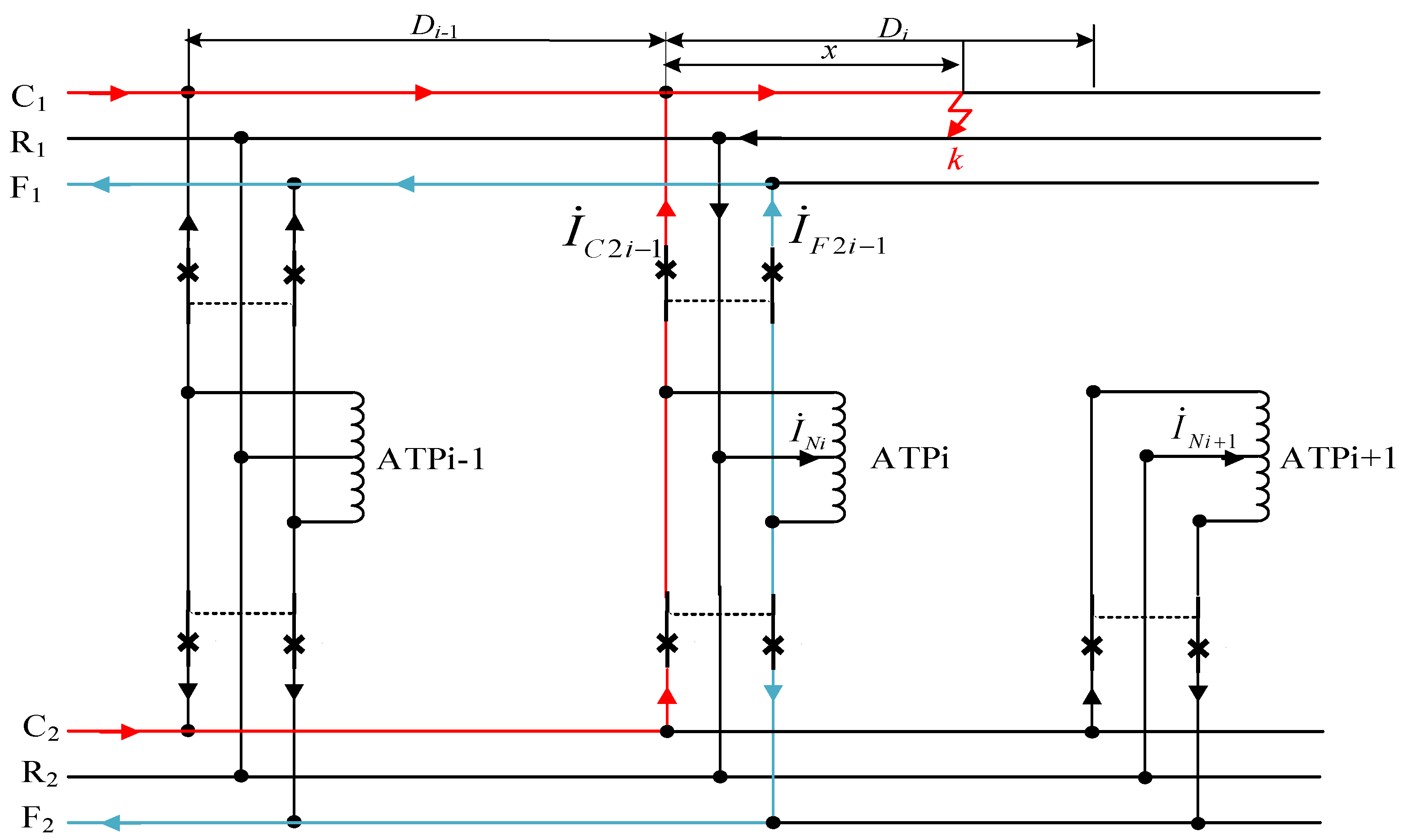
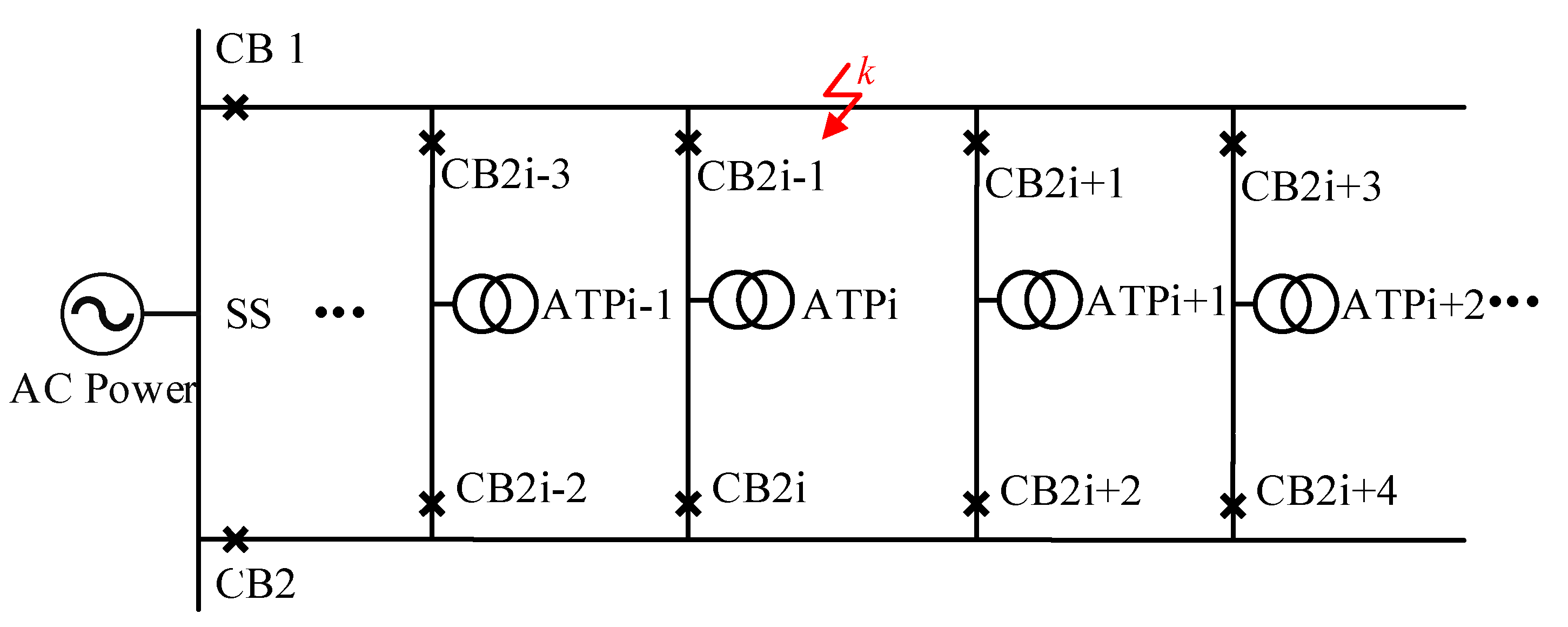
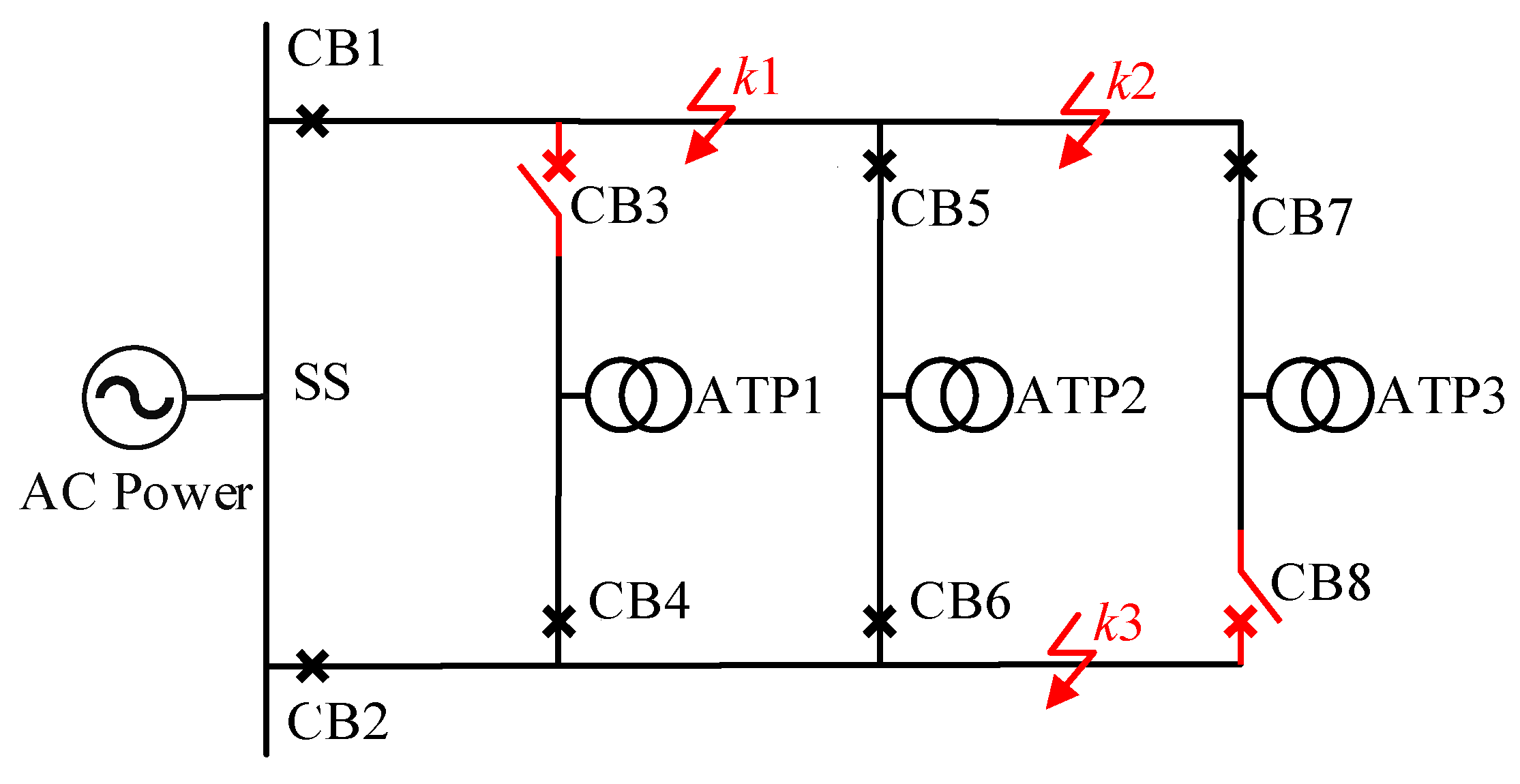
2. Fault Characteristics of AARS
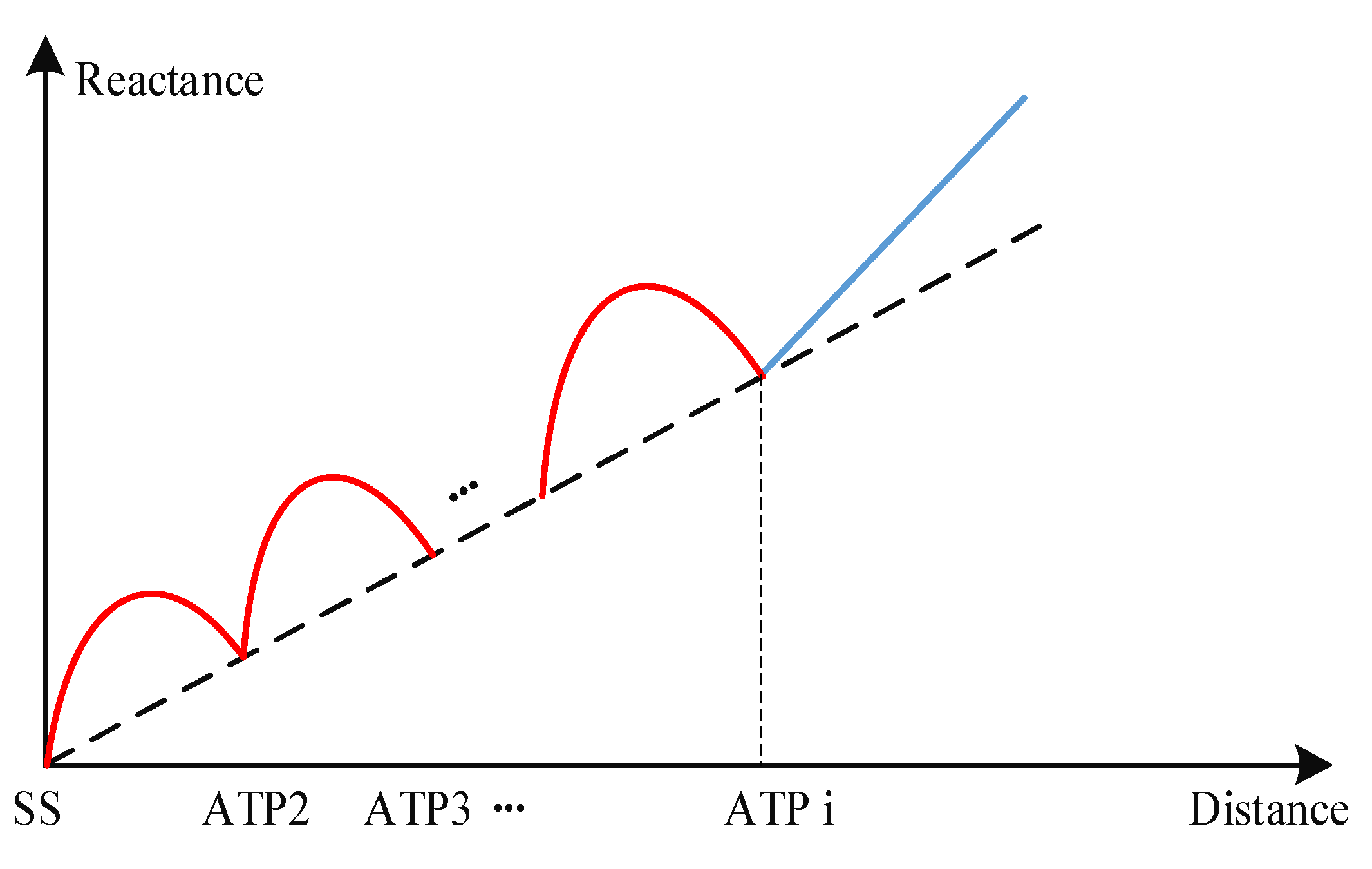
3. Classification of Feeding Conditions of the Faulted Section and Fault Location Methods
4. Generalized Fault Location Scheme
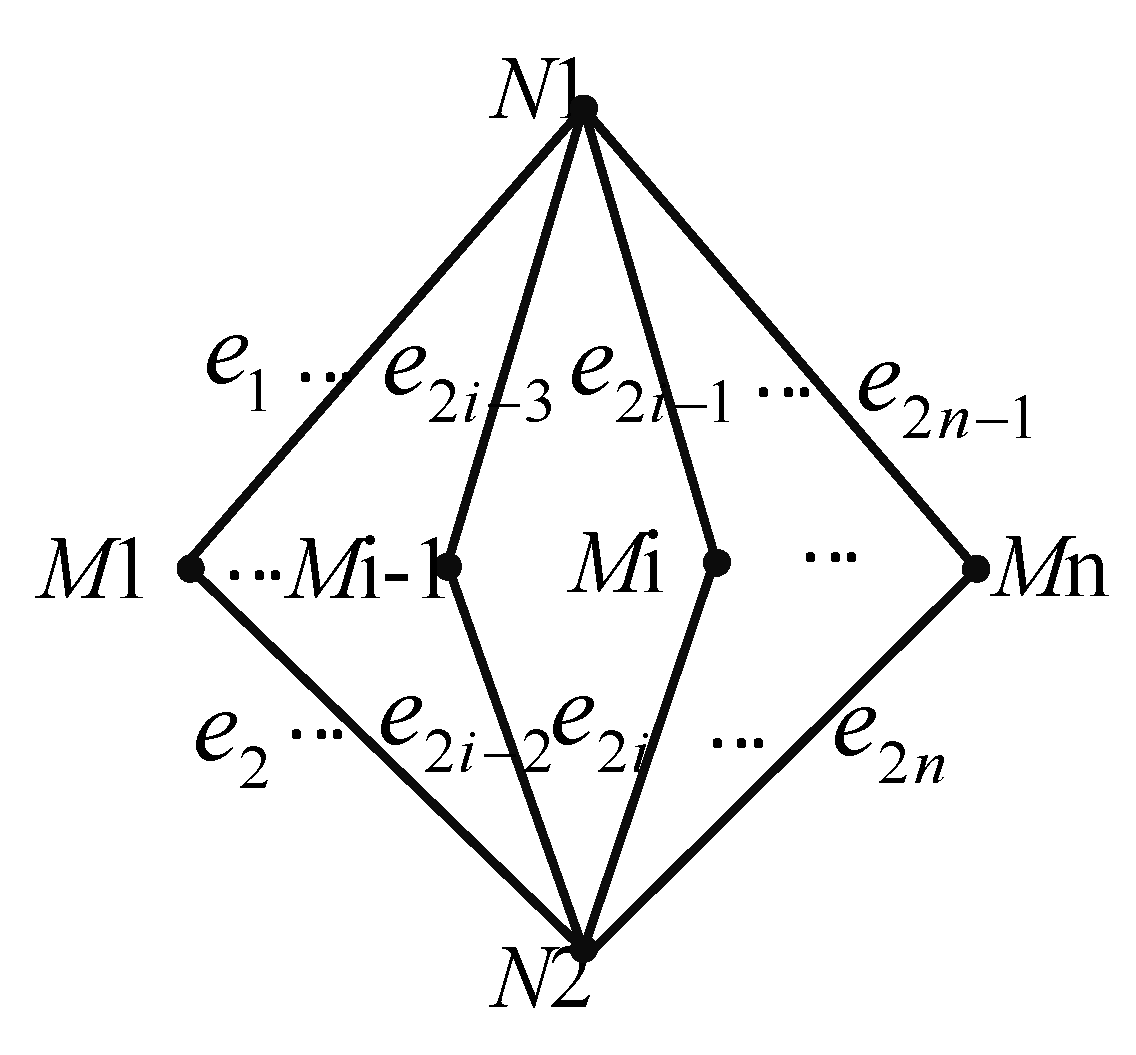
4.1. Fault State Matrix

- (1)
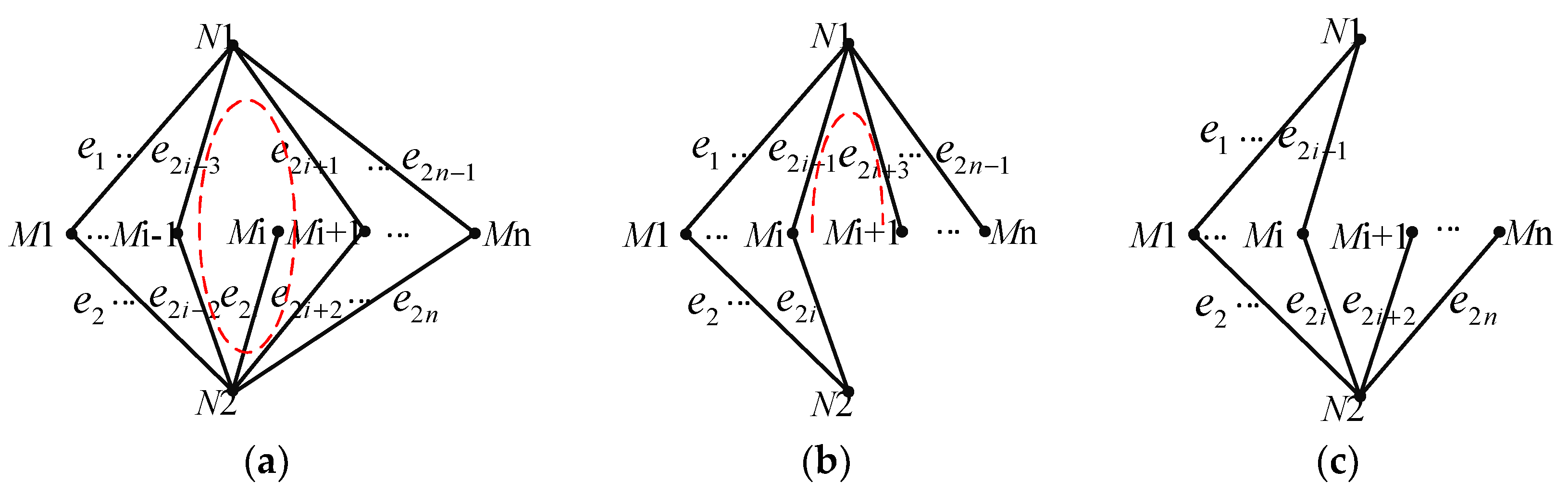
- When the two circuit breakers of one parallel line are both closed, only elements corresponding to the first parallel connections before and after the fault point have a value of 1.
- (2)
- When one circuit breaker of one parallel line is closed, only the elements corresponding to the first ATP before and after the fault point have a value of 1.
- (3)
- When one circuit breaker at the SS is open, the two elements of the first column have a value of 1.
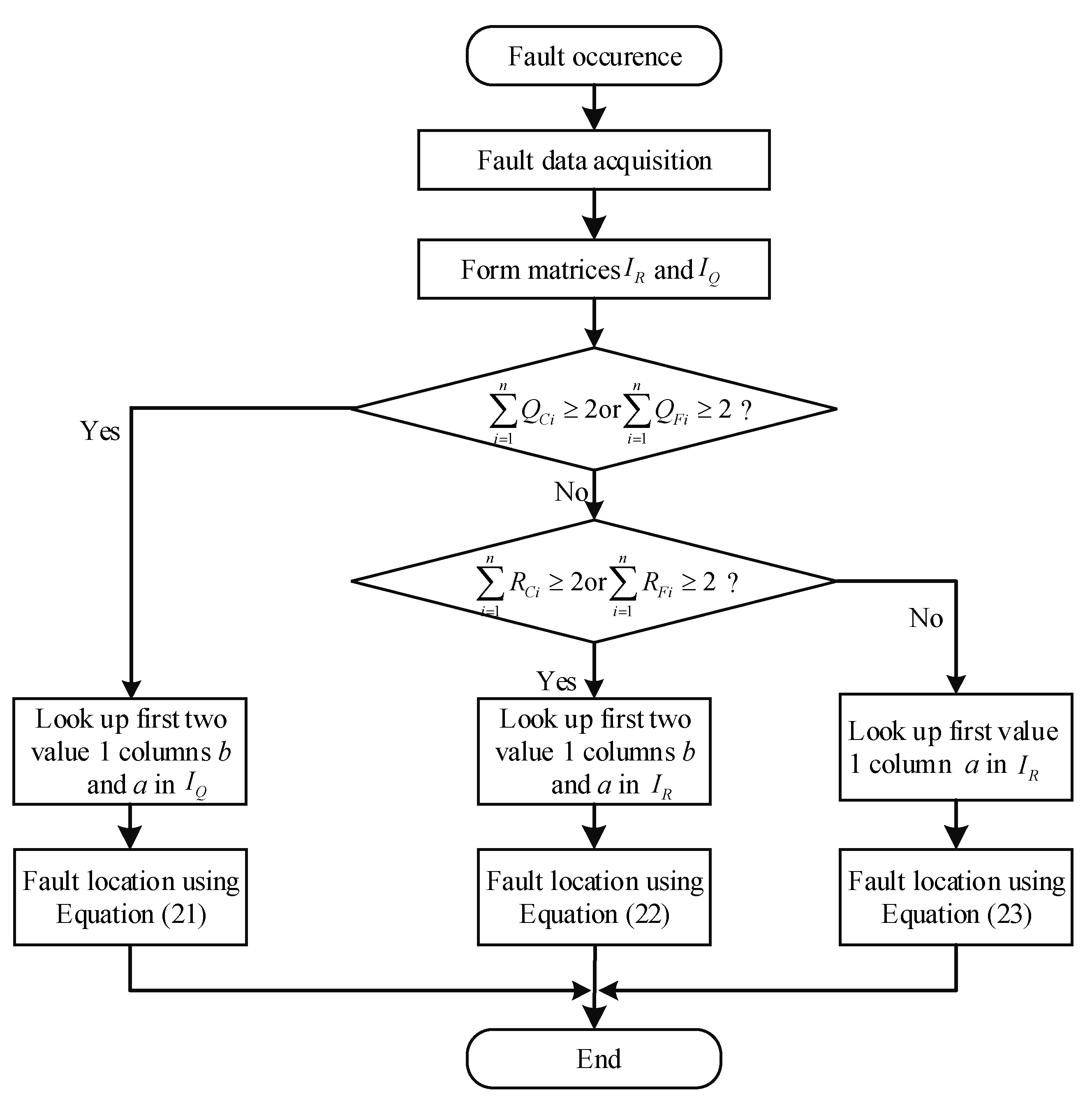
4.2. Identification of Faulted Section and Fault Location Scheme
5. Simulation and Analysis
5.1. Case Analysis
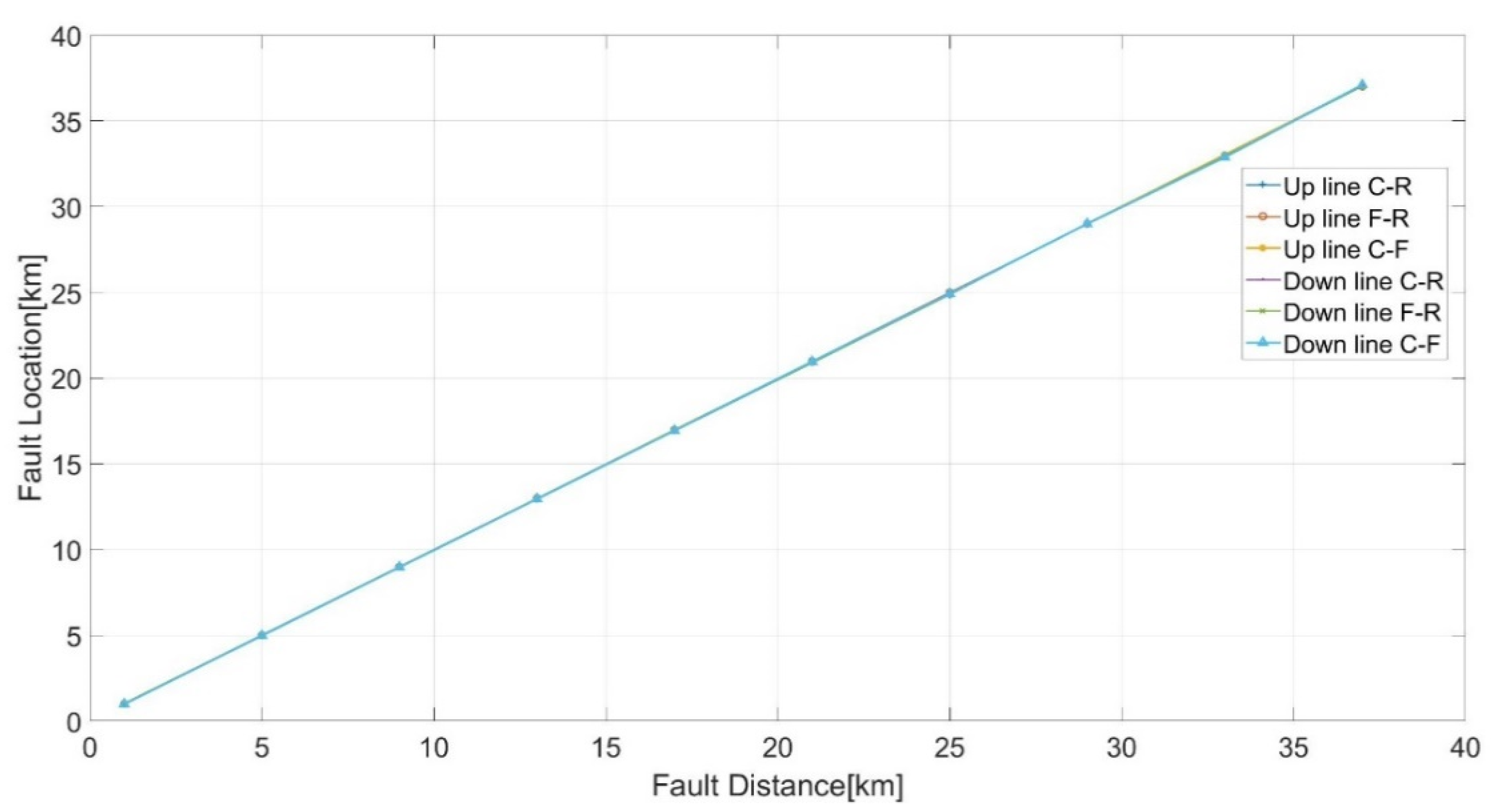
5.2. Results of Proposed Scheme
- (a)
- Impact of Fault Distance
- (b)
- Impact of the Feeding Condition
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhou, Y.; Xu, G.; Chen, Y. Fault Location in Power Electrical Traction Line System. Energies 2012, 5, 5002–5018. [Google Scholar] [CrossRef]
- Yu, C.; Chang, L.; Cho, J. New Fault Impedance Computations for Unsychronized Two-Terminal Fault-Location Computations. IEEE Trans. Power Del. 2011, 26, 2879–2881. [Google Scholar] [CrossRef]
- Bains, T.; Zadeh, M. Supplementary Impedance-Based Fault Location Algorithm for Series Compensated Lines. IEEE Trans. Power Del. 2015, 31, 334–342. [Google Scholar] [CrossRef]
- Zhu, J.; Lubkeman, D.; Girgis, A. Automated Fault Location and Diagnosis on Electric Power Distribution Feeders. IEEE Trans. Power Del. 1997, 12, 801–808. [Google Scholar]
- Dashti, R.; Tahavori, M.; Daisy, M.; Shaker, H. A New Matching Algorithm for Fault Section Estimation in Power Distribution Networks. In Proceedings of the 2018 International Symposium on Advanced Electrical and Communication Technologies (ISAECT), Rabat, Morocco, 21–23 November 2018; pp. 1–4. [Google Scholar]
- Liao, Y. Generalized Fault-Location Methods for Overhead Electric Distribution Systems. IEEE Trans. Power Del. 2011, 26, 53–64. [Google Scholar] [CrossRef]
- Han, Z.; Li, S.; Liu, S.; Gao, S. A Reactance-Based Fault Location Method for Overhead Lines of AC Electrified Railway. IEEE Trans. Power Del. 2020. [Google Scholar] [CrossRef]
- Fujie, H.; Miura, A. Fault Location System in Autotransformer Feeding Circuit of AC Electric Railways. Electr. Eng. Jpn. 1976, 5, 96–105. [Google Scholar] [CrossRef]
- Gao, S.; Huang, W. Principle and Application of a New Type Microprocessor-based Fault Locator for AT Feeding Traction System. In Proceedings of the Sixth International Conference on Developments in Power System Protection, Nottingham, UK, 25–27 March 1997; pp. 323–326. [Google Scholar]
- Wang, C.; Yin, X. Comprehensive Revisions on Fault-Location Algorithm Suitable for Dedicated Passenger Line of High-Speed Electrified Railway. IEEE Trans. Power Del. 2012, 27, 2415–2417. [Google Scholar] [CrossRef]
- Serrano, J.; Platero, C.; López-Toledo, M.; Granizo, R. A New Method of Ground Fault Location in 2 × 25 kV Railway Power Supply Systems. Energies 2017, 10, 340. [Google Scholar] [CrossRef]
- Cho, G.; Kim, C.; Kim, M.; Kim, D.-H.; Heo, S.-H.; Min, M.-H.; An, T.-P. A Novel Fault-Location Algorithm for AC Parallel Autotransformer Feeding System. IEEE Trans. Power Del. 2019, 34, 475–485. [Google Scholar] [CrossRef]
- Duan, J.J.; Xue, Y.D.; Xu, B.Y.; Sun, B. Study on technology of traveling wave method fault location in traction power supply system. In Proceedings of the 10th IET International Conference on Developments in Power System Protection (DPSP 2010). Managing the Change, Manchester, UK, 29 March–1 April 2010; pp. 1–5. [Google Scholar]
- Zhang, D.; Wu, M.; Xia, M. Study on Traveling Wave Fault Location Device for Electric Railway Catenary System Based on DSP. In Proceedings of the 2009 International Conference on Sustainable Power Generation and Supply, Nanjing, China, 6–7 April 2009; pp. 1–4. [Google Scholar]
- Xia, M.; Wu, M. Traveling Wave Fault Location Scheme for Jing-Jin Dedicated Passenger Line Electric Railway Traction System. In Proceedings of the 2009 International Conference on Power Engineering, Energy and Electrical Drives, Lisbon, Portugal, 18–20 March 2009; pp. 447–449. [Google Scholar]
- Oura, Y.; Mochinaga, Y.; Nagasawa, H. Railway Electric Power Feeding systems. Jpn. Railw. Transp. Rev. 1998, 16, 48–58. [Google Scholar]
- Zhao, T.; Wu, M. Electric Power Characteristics of All-Parallel AT Traction Power Supply System. In Proceedings of the 2011 International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE), Changchun, China, 16–18 December 2011; pp. 895–898. [Google Scholar]
- Zhang, S.; Yan, Y.; Bao, W.; Guo, S.; Jiang, J.; Ma, M. Network Topology Identification Algorithm Based on Adjacency Matrix. In Proceedings of the 2017 IEEE Innovative Smart Grid Technologies—Asia (ISGT-Asia), Auckland, New Zealand, 4–7 December 2017; pp. 1–5. [Google Scholar]
- Wang, Y.; Liu, Z.; Yan, W. Algorithms for Random Adjacency Matrixes Generation Used for Scheduling Algorithms Test. In Proceedings of the 2010 International Conference on Machine Vision and Human-machine Interface, Kaifeng, China, 24–25 April 2010; pp. 422–424. [Google Scholar]
- Han, Z.; Zhang, Y.; Liu, S.; Gao, S. Modeling and Simulation for Traction Power Supply System of High-Speed Railway. In Proceedings of the 2011 Asia-Pacific Power and Energy Engineering Conference (APPEEC), Wuhan, China, 25–28 March 2011; pp. 1–4. [Google Scholar]
- Han, Z.; Liu, S.; Gao, S.; Bo, Z. Protection Scheme for China High-Speed Railway. In Proceedings of the 10th IET International Conference on Developments in Power System Protection (DPSP 2010). Managing the Change, Manchester, UK, 29 March–1 April 2010; pp. 1–5. [Google Scholar]
- Gu, J.; Yu, S. Removal of DC Offset in Current and Voltage Signals Using a Novel Fourier Filter Algorithm. IEEE Trans. Power Del. 2000, 15, 73–79. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| uncertain | uncertain | no-fault | fault |
| Fault Distance/km | Fault Location/km | |||||
|---|---|---|---|---|---|---|
| Up line | Down Line | |||||
| C-R | F-R | C-F | C-R | F-R | C-F | |
| 1 | 1.03 | 1.01 | 1.02 | 0.99 | 0.99 | 0.99 |
| 5 | 5.00 | 5.00 | 5.00 | 4.98 | 4.97 | 4.98 |
| 9 | 8.97 | 9.00 | 8.99 | 8.97 | 8.96 | 8.97 |
| 13 | 12.94 | 13.00 | 12.97 | 12.96 | 12.94 | 12.95 |
| 17 | 16.92 | 16.99 | 16.98 | 16.96 | 16.91 | 16.94 |
| 21 | 20.89 | 20.99 | 20.94 | 20.96 | 20.88 | 20.93 |
| 25 | 24.86 | 24.99 | 24.93 | 24.96 | 24.86 | 24.92 |
| 29 | 29.00 | 29.00 | 29.00 | 29.00 | 29.00 | 29.00 |
| 33 | 32.90 | 32.98 | 33.02 | 32.91 | 32.96 | 32.88 |
| 37 | 37.03 | 37.01 | 37.06 | 37.08 | 37.01 | 37.10 |
| No. | Switch State Matrix | k1 | k2 | k3 | |||
|---|---|---|---|---|---|---|---|
| Faulted Section | Fault Location/km | Faulted Section | Fault Location/km | Faulted Section | Fault Location/km | ||
| 1 | ATP1-ATP2 | 16.98 | ATP2-ATP3 | 33.02 | ATP2-ATP3 | 32.96 | |
| 2 | SS-ATP3 | 16.94 | SS-ATP3 | 32.85 | SS-ATP3 | 32.96 | |
| 3 | ATP1-ATP2 | 17.06 | ATP2-ATP3 | 33.05 | - | - | |
| 4 | SS-ATP3 | 17.08 | SS-ATP3 | 33.03 | SS-ATP3 | 32.95 | |
| 5 | ATP1-ATP2 | 16.98 | ATP2-ATP3 | 33.11 | ATP2-ATP3 | 32.87 | |
| 6 | SS-ATP2 | 17.00 | ATP2-ATP3 | 33.02 | ATP2-ATP3 | 33.01 | |
| 7 | ATP1-ATP2 | 17.12 | ATP2-ATP3 | 33.02 | ATP1-ATP3 | 33.02 | |
| 8 | SS-ATP2 | 16.99 | ATP2-ATP3 | 32.90 | ATP2-ATP3 | 32.88 | |
| 9 | ATP1-ATP2 | 16.97 | ATP2-ATP3 | 33.02 | ATP2-ATP3 | 32.87 | |
| 10 | ATP1-ATP3 | 16.94 | ATP1-ATP3 | 33.01 | ATP1-ATP3 | 32.99 | |
| 11 | SS-ATP2 | 16.96 | ATP2-ATP3 | 32.98 | ATP1-ATP3 | 33.00 | |
| 12 | ATP1-ATP2 | 17.06 | ATP2-ATP3 | 32.90 | ATP1-ATP3 | 32.97 | |
| 13 | SS-ATP3 | 17.01 | SS-ATP3 | 32.92 | ATP2-ATP3 | 32.87 | |
| 14 | ATP1-ATP3 | 16.98 | ATP1-ATP3 | 32.92 | ATP2-ATP3 | 32.89 | |
| 15 | SS-ATP3 | 17.12 | SS-ATP3 | 33.10 | ATP1-ATP3 | 32.97 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Z.; Li, S.; Liu, S.; Gao, S. Generalized Fault-Location Scheme for All-Parallel AT Electric Railway System. Energies 2020, 13, 4081. https://doi.org/10.3390/en13164081
Han Z, Li S, Liu S, Gao S. Generalized Fault-Location Scheme for All-Parallel AT Electric Railway System. Energies. 2020; 13(16):4081. https://doi.org/10.3390/en13164081
Chicago/Turabian StyleHan, Zhengqing, Shuai Li, Shuping Liu, and Shibin Gao. 2020. "Generalized Fault-Location Scheme for All-Parallel AT Electric Railway System" Energies 13, no. 16: 4081. https://doi.org/10.3390/en13164081
APA StyleHan, Z., Li, S., Liu, S., & Gao, S. (2020). Generalized Fault-Location Scheme for All-Parallel AT Electric Railway System. Energies, 13(16), 4081. https://doi.org/10.3390/en13164081