Power System Hardware in the Loop (PSHIL): A Holistic Testing Approach for Smart Grid Technologies

 , , and
, , and
Abstract
1. Introduction
2. PSHIL Architecture
2.1. Real-Time Simulated Power System
2.2. Physical Power System
2.3. Power Supply
- External network. This is the most cost-effective option to supply the PSHIL platform since only a connection with an available external network is required. This usually corresponds to a node of the laboratory network in case of scaled-down distribution systems. The rated power and voltage depend on the characteristic of this connection node. This, however, has limited flexibility, as the PSHIL voltage and frequency are mainly imposed by the laboratory network. Therefore, intentional events such as voltage and frequency disturbances required for testing the provision of ancillary services [21,22,23] cannot be reproduced in a straightforward manner. This option, however, is adequate for analyzing the interaction of different DUTs and the power system in quasi-steady-state conditions [24,25,26,27].
- Synchronous generator. In this case, a synchronous generator driven by a primary energy source (steam/hydraulic turbine, diesel motor, DC machine or induction motor fed with a variable speed drive) provides the power to the network [28]. Note that without a connection to an external network, the physical environment is operated in islanded mode. This endows the system with greater flexibility because it should be possible to reproduce frequency and voltage disturbances. Moreover, with the adequate control actions on those prime movers based on electrical machines (DC machine or induction motor fed with a variable speed drive), it should be possible to reproduce the dynamic behavior of any actual generator driven by a hydraulic/steam turbine or diesel motor without any complex auxiliary systems [29].
- Controllable voltage source. This is the power-electronic counterpart of the synchronous generator where the mechanically coupled rotating machines are substituted by two voltage-source converters (VSCs) in a back-to-back configuration. This allows a total controlability of the output voltage with really fast dynamics. Note also that controllable voltage sources are an indispensable component for interfacing the real-time simulated with the physical network if required. The main drawback of these devices is the high cost, especially for those that are based on linear technology.
- Actual renewable generators. This type of power supply, including photovoltaic and wind generators, provides realism to the testing. Its main drawback, however, refers to the impossibility of controlling the primary energy source, which considerably limits the replicability of the testing conditions.
2.4. Loads
- Passive elements. These are elements with no control capability to change their operating states according to setpoints. Resistors, inductors, and capacitors are within this group. The main advantage of these elements is that they are inexpensive, but at the cost of providing a limited flexibility, which may limit the testing scenarios.
- Active elements. This kind of load allows controlling the power demand according to setpoints, with adapting the testing scenarios according to the user needs being possible. Moreover, this capability allows reproducing the daily load profiles of different customer types (domestic, commercial, and industrial loads). Commercial electronic loads or VSCs supplied from the DC side with an external DC source may act as a controllable active element. The main drawback, however, is that they are complex devices involving different technologies like power electronics and control and communication systems.
2.5. Devices and Algorithms under Test—DUTs and AUTs
2.6. PSHIL Management
- Local controllers. The first control layer consists of the different LCs associated with each element, i.e., loads, generators, or DUTs. The objective of each LC is to guarantee that the corresponding device follows specific setpoints during the tests, which are sent by the centralized PSHIL management. Additionally, LCs are in charge of monitoring and protecting the controlled device.
- Centralized PSHIL management. This layer is in charge of several tasks, which can be broadly classified into two main categories [24]: off-line and on-line tasks. On the one hand, off-line tasks are devoted to configuring the testing scenario by: (i) adjusting the topology and parameters of the networks; (ii) defining the operation of loads and generators; and (iii) setting the functionalities of DUTs and AUTs. On the other hand, online tasks are committed to controlling and supervising the tests. Control tasks are required to send to the different LCs the adequate setpoints according to the defined testing scenario. Note that some of these setpoints are defined by the offline tasks, e.g., active power demand of a load, but other ones can be determined in real-time by the AUT, e.g., optimal reactive power of a distributed generator. In any case, all of these setpoints are managed by this centralized management layer. In turn, supervision tasks are in charge of monitoring the relevant electrical magnitudes with a twofold objective: guaranteeing the safe operation of all of the physical components (network, loads, generators, and DUTs) and gathering all of the required measurements. These measurements are provided to the AUTs, which may use them to compute the DUT setpoints, but are also stored for later analysis.
2.7. Energy Management
3. PSHIL Benefits
- Simultaneous testing of different DUTs considering their mutual interaction through the real-time simulated or actual power system.
- Simultaneous testing of DUTs and AUTs, which analyzing the performance of closed control loop actions in real conditions.
- Simultaneous testing of different technologies such as power electronics, control software, communication infrastructure, etc., which may interact each other.
- Power-system-oriented testing capability in addition to the classical device-oriented approach.
4. PSHIL Infrastructure at the University of Sevilla
- Real-time simulated network. OPAL-RT is available for simulating in real-time any transmission or distribution network.
- Physical electrical network. The PSHIL infrastructure has a scaled-down version of the MV distribution network proposed by the CIGRE Task Force C06.04.02 for the analysis of the distributed generation [58]. This physical system, whose one-line diagram is shown in Figure 5, is fully described in [24]. Basically, it is composed of two feeders with 14 nodes where different loads, generators, and DUTs can be connected. The lines between the different nodes are emulated using their corresponding lumped resistive and inductive parameters. This physical system is rated to 400 V and 100 kVA at the head of the feeders.
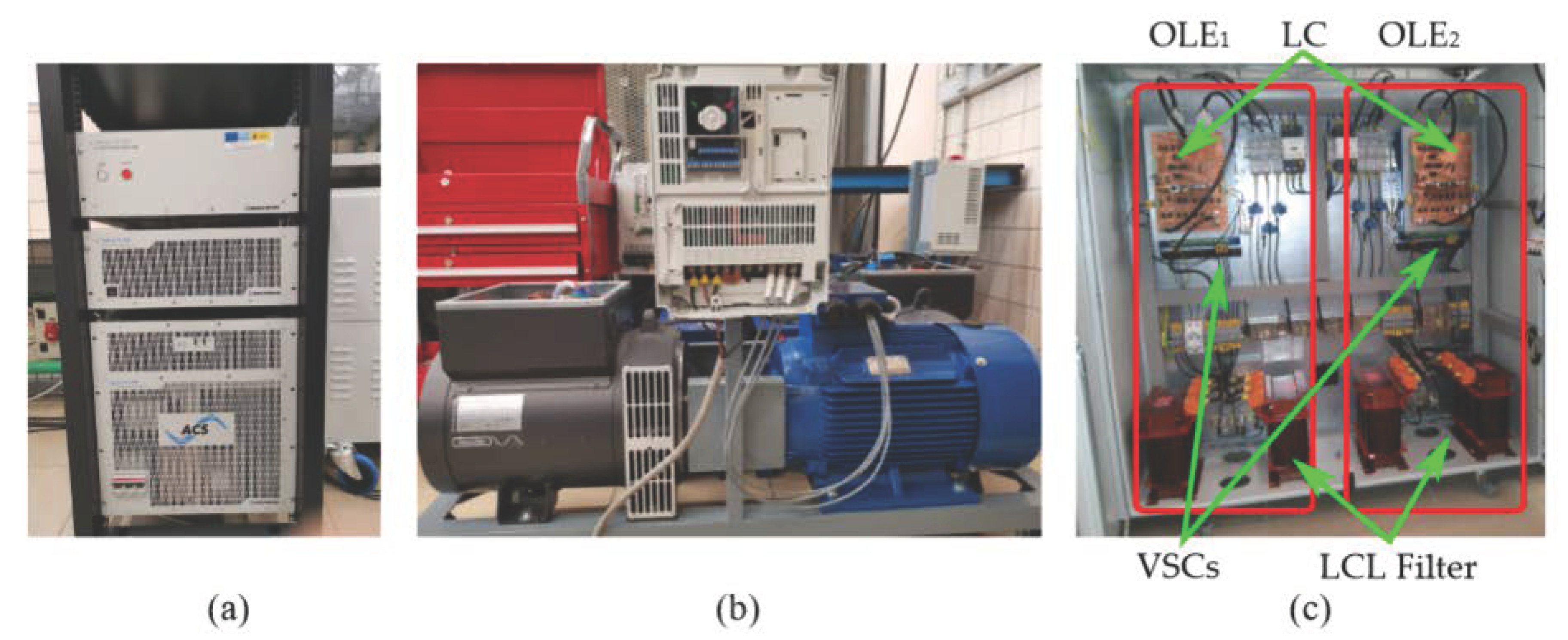
- Power supply. Three different possibilities are available: laboratory LV network, synchronous generators, and power amplifier. The laboratory LV network, 400 V and 100 kVA, is the common option for the grid-connected analysis of the network under study. For those tests where a precise control of the supply voltage is required, a Regatron TC.ACS power amplifier shown in Figure 6a, 400 V and 50 kVA, is used. This power amplifier can also be connected to the OPAL-RT platform for interfacing a DUT. The synchronous generators shown in Figure 6b, 3 units rated to 400 V and 15 kVA, can be used for testing the network in islanded conditions. In this case, the synchronous generators are driven by induction motors fed with a variable speed drive.
- Loads. The PSHIL infrastructure is equipped with active loads able to change their operating point (active and reactive powers) according to an external reference provided by the management layer. The active loads are based on the Omnimode Load Emulator (OLE) concept [24]. Basically, an OLE is composed pf a controlled VSC that is connected to a node of the scaled-down distribution network in its AC side. Additionally, the DC side is connected to a common DC bus that is controlled by an additional VSC in charge of providing the required active power of each OLE connected to the DC bus. Note that the OLEs can be used for emulating loads or generators, and the balanced VSC, which is connected to the laboratory LV grid, has to provide just the net power injected to the physical scaled-down distribution network. Each individual OLE, shown in Figure 6c, is based on a two-level VSC that is controlled following a classical PI approach in dq coordinates [24]. All of the OLEs are rated to 400V and 20 kVA, while the balanced VSC in charge of regulating the DC bus voltage is rated to 400 V and 100 kVA. The OLEs are connected to the buses N3, N5, N6, N7, N8, N9, N10, and N14.
- DUTs. Two DUTs are so far available to be tested in this PSHIL infrastructure. First, a DC link between the nodes N8 and N14 for controlling the active power transfer between the feeders and also the reactive power injections at these nodes as shown in Figure 5. The DC link is rated to 400 V and 20 kVA. Second, a static OLTC based on thyristor technology coupled to a V transformer installed at the connection point with the laboratory network, which allows regulating the supply voltage on load. In addition, it is important to highlight that the design of this PSHIL infrastructure is quite flexible, being possible to incorporate also as DUT some of the already analyzed OLEs, or any other device. In fact, [25] analyzes the minimization of power losses (AUT) in the scaled-down distribution system using the static OLTC, the DC link, and the reactive power injections of some distributed generators emulated with the OLEs.
- PSHIL management. It has been implemented in a real-time platform provided by SpeedGoat. Particularly, this management system provides a bidirectional communication channel with the OLEs, DUTs, and AUTs by means of an UDP/IP communication protocol. The time latency with the local controllers of OLEs and DUTs is in the range of hundreds of microseconds, while the characteristic latency of AUTs depends on the algorithm but are in the range of minutes.
5. PSHIL Example of Application
5.1. PSHIL Infrastructure Used in the Application Example
5.2. PSHIL Test Cases
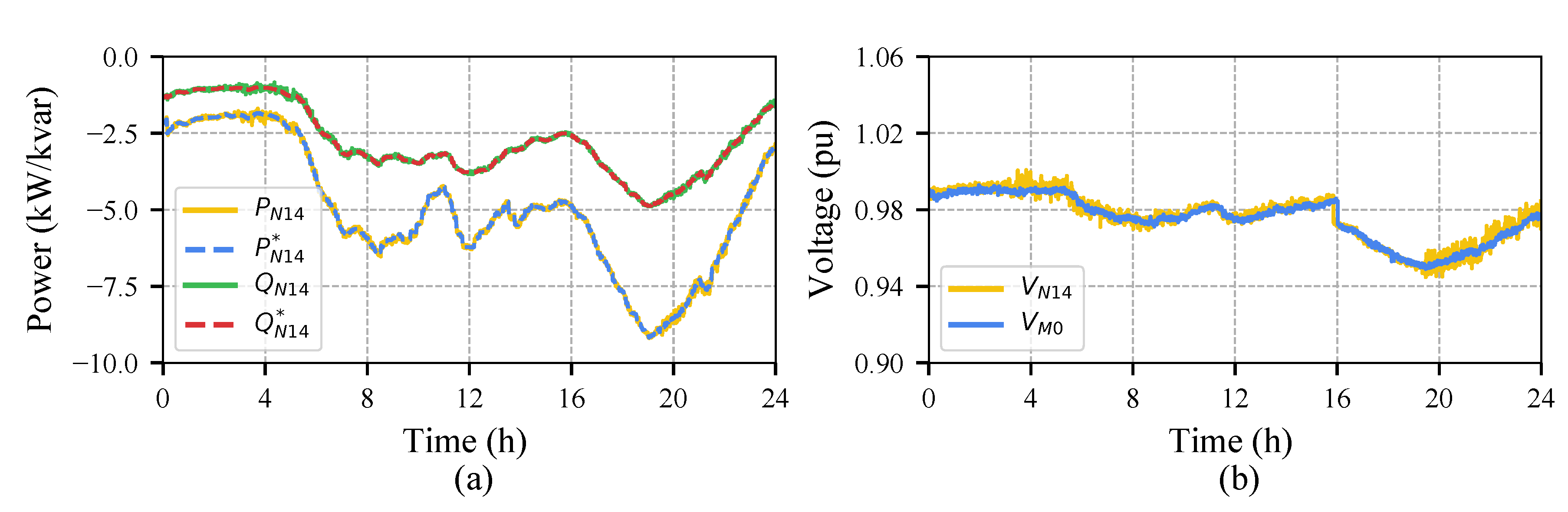
- PSHIL MV and LV network coupling (PSHIL-1). This test case evaluates the performance of the DUT in charge of interfacing the physical network and the real-time simulated network. This corresponds to the OLE connected to bus N14 of the physical system.
- PSHIL MV control assets (PSHIL-2). The MV network DUTs (DERs, OLTC, and DC Link) are added to the previous case with setpoints computed by an AUT based on an OPF to minimize power losses. In addition to the assessment of each individual DUT, this case is focused on the impact of MV control assets to both MV and LV networks.
- PSHIL MV/LV control assets (PSHIL-3). This case adds to the previous case the voltage control on the LV network using a local reactive power droop strategy. Therefore, it should be possible to evaluate how the LV network control assets react with the MV and LV network changes.
5.3. PSHIL Experimental Results
5.3.1. PSHIL-1 Results
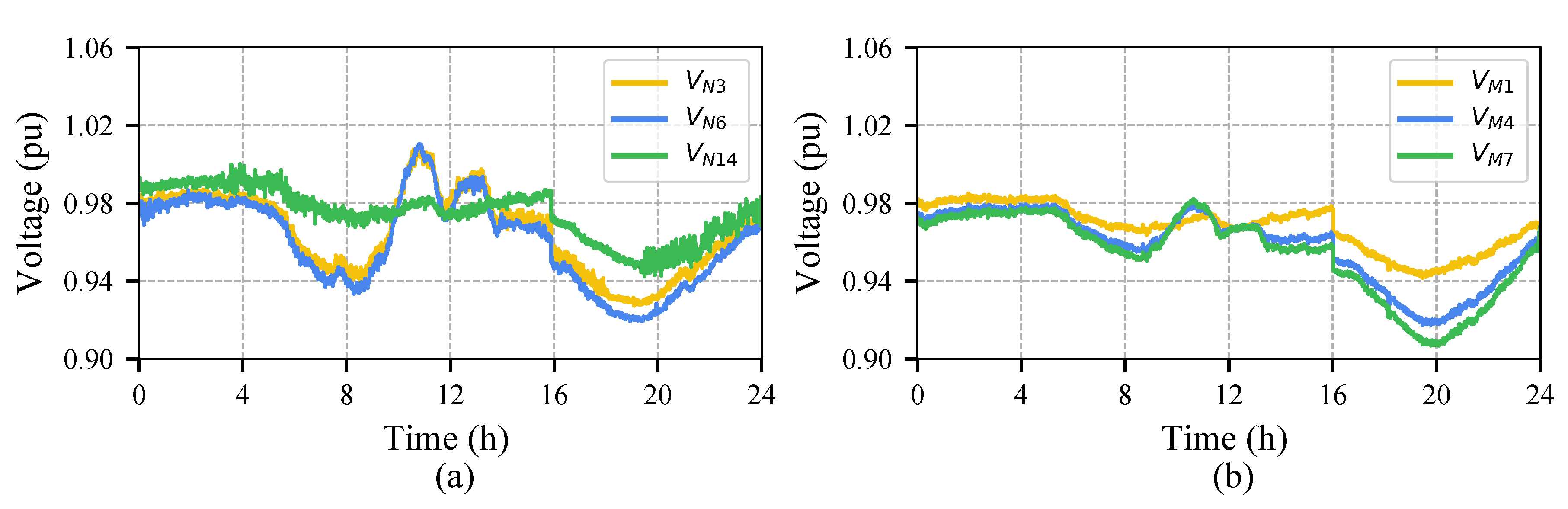
5.3.2. PSHIL-2 Results
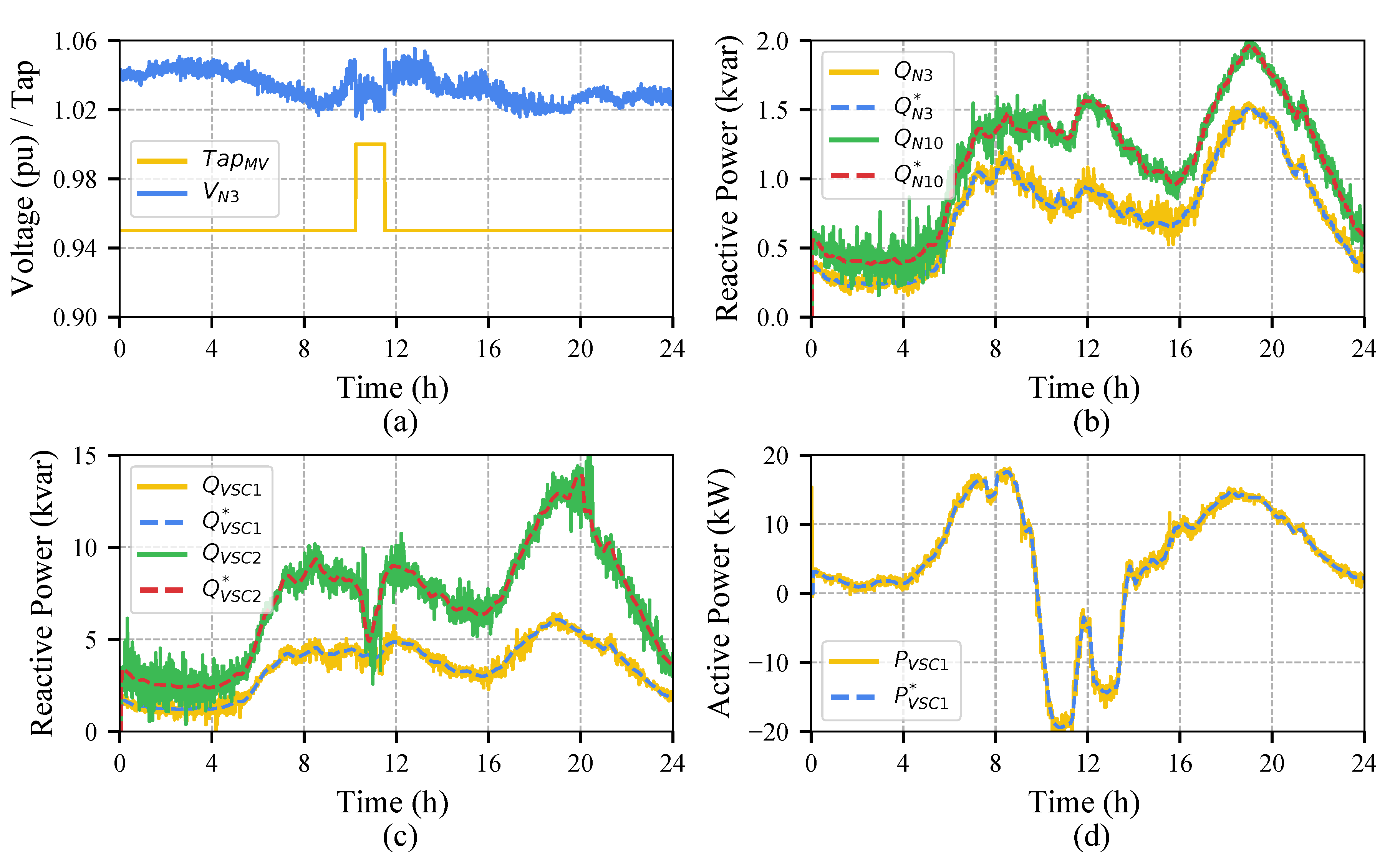
- OLTC. Figure 12a shows the 24-h OLTC tap position and the voltage of bus N3. The tap position is maintained most of the time in the lowest position in order to increase the MV voltages to reduce the power losses as much as possible. However, the tap is changed to its central position during the period when the DER injects the maximum power to fulfill the maximum voltage constraint imposed by the OPF (1.05 pu).
- DERs. The reactive power injections of DERs connected to buses N3 and N10 are depicted in Figure 12b. These show a proper tracking of the setpoints computed by the AUT. Note that the reactive power injection in bus N10 is higher that in bus N3 because of the electrical distance. This bus is farther away from the initial node of the MV scaled-down network and, therefore, experiences a larger voltage drop caused by the loads. This requires a higher reactive power injection to maintain the voltages as high as possible.
- DC link. The 24-h active and reactive power flows through the DC link are depicted in Figure 12c and Figure 12d, respectively. The setpoints computed by the AUT are tracked without errors by the DC link. Both DC-link sides inject reactive power to their corresponding connection nodes to increase the voltages locally. In addition, the DC link transfers active power from N8 to N14 around noon when the PV generation injects the maximum power. The opposite situation happens in the rest of the day, where the DC link acts to equalize the load of each MV scaled-down distribution feeder to reduce the active power losses as much as possible.
5.3.3. PSHIL-3 Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AC | Alternating Current |
| AUT | Algorithm Under Test |
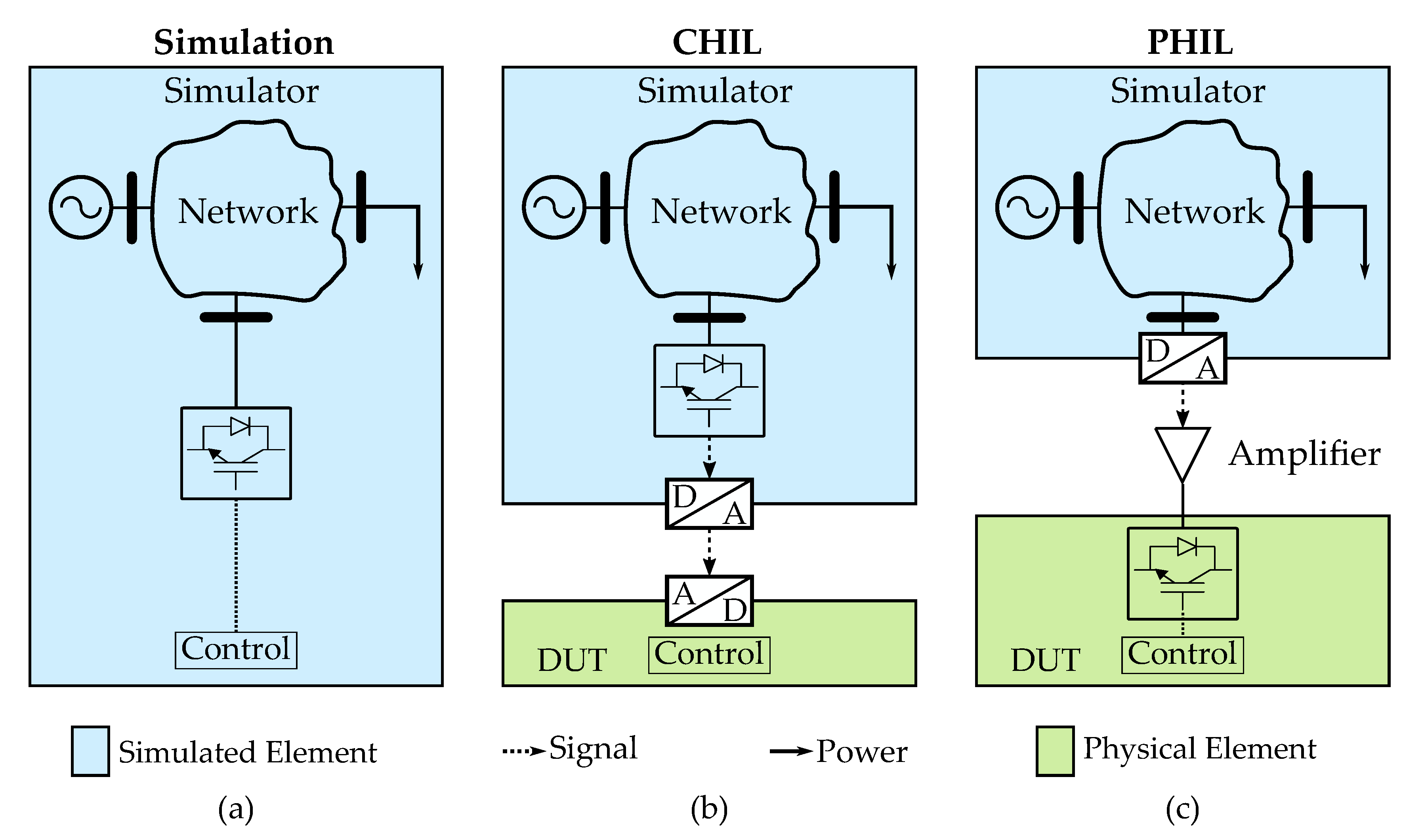
| CHIL | Controller-Hardware-in-the-Loop |
| DC | Direct Current |
| DER | Distributed Energy Resource |
| DUT | Device Under Test |
| FACTS | Flexible AC Transmission System |
| HIL | Hardware-in-the-Loop |
| HVDC | High-Voltage DC |
| LC | Local Control |
| LV | Low Voltage |
| MV | Medium Voltage |
| OLE | Omnimode Load Emulator |
| OLTC | On-Load Tap-Changer |
| OPF | Optimal Power Flow |
| PHIL | Power-Hardware-in-the-Loop |
| PSHIL | Power-System-Hardware-in-the-Loop |
| POI | Point of Interconnection |
| PV | Photovoltaic |
| RTCS | Real-Time Control System |
| VSC | Voltage Source Converter |
References
- International Energy Agency. Global EV Outlook 2018: Towards cross-modal electrification. In Proceedings of the Clean Energy Ministerial, Copenhagen, Denmark, 22–24 May 2018. [Google Scholar]
- Kyoto Protocol to the United Nations Framework Convention on Climate Change. 1998. Available online: https://unfccc.int/resource/docs/convkp/kpeng.pdf (accessed on 16 March 1998).
- Steinberg, D.; Bielen, D.; Eichman, J.; Eurek, K.; Logan, J.; Mai, T.; McMillan, C.; Parker, A.; Vimmerstedt, L.; Wilson, E. Electrification and Decarbonization: Exploring U.S. Energy Use and Greenhouse Gas Emissions in Scenarios with Widespread Electrification and Power Sector Decarbonization; Technical Report; NREL: Washington, DC, USA, 2017. [CrossRef]
- De Quevedo, P.M.; Muñoz-Delgado, G.; Contreras, J. Impact of Electric Vehicles on the Expansion Planning of Distribution Systems Considering Renewable Energy, Storage, and Charging Stations. IEEE Trans. Smart Grid 2019, 10, 794–804. [Google Scholar] [CrossRef]
- Yu, X.; Jiang, Z.; Zhang, Y. Control of Parallel Inverter-Interfaced Distributed Energy Resources. In Proceedings of the 2008 IEEE Energy 2030 Conference, Atlanta, GA, USA, 17–18 November 2008; pp. 1–8. [Google Scholar] [CrossRef]
- Li, H.; Li, F.; Xu, Y.; Rizy, D.T.; Kueck, J.D. Adaptive Voltage Control With Distributed Energy Resources: Algorithm, Theoretical Analysis, Simulation, and Field Test Verification. IEEE Trans. Power Syst. 2010, 25, 1638–1647. [Google Scholar] [CrossRef]
- Li, H.; Li, F.; Xu, Y.; Rizy, D.T.; Kueck, J.D. Interaction of multiple distributed energy resources in voltage regulation. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Yang, T.; Wu, D.; Stoorvogel, A.A.; Stoustrup, J. Distributed coordination of energy storage with distributed generators. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, S.; Sun, H.; Zhang, Z.; Guo, Q.; Zhao, B.; Bi, J.; Zhang, B. MAS-Based Decentralized Coordinated Control Strategy in a Micro-Grid with Multiple Microsources. Energies 2020, 13, 2141. [Google Scholar] [CrossRef]
- Salcedo, R.; Corbett, E.; Smith, C.; Limpaecher, E.; Rekha, R.; Nowocin, J.; Lauss, G.; Fonkwe, E.; Almeida, M.; Gartner, P.; et al. Banshee distribution network benchmark and prototyping platform for hardware-in-the-loop integration of microgrid and device controllers. J. Eng. 2019, 2019, 5365–5373. [Google Scholar] [CrossRef]
- Kotsampopoulos, P.; Lagos, D.; Hatziargyriou, N.; Faruque, M.O.; Lauss, G.; Nzimako, O.; Forsyth, P.; Steurer, M.; Ponci, F.; Monti, A.; et al. A Benchmark System for Hardware-in-the-Loop Testing of Distributed Energy Resources. IEEE Power Energy Technol. Syst. J. 2018, 5, 94–103. [Google Scholar] [CrossRef]
- Newaz, A.; Ospina, J.; Faruque, M.O. Controller Hardware-in-the-Loop Validation of a Graph Search Based Energy Management Strategy for Grid-Connected Distributed Energy Resources. IEEE Trans. Energy Convers. 2020, 35, 520–528. [Google Scholar] [CrossRef]
- Pellegrino, L.; Sandroni, C.; Bionda, E.; Pala, D.; Lagos, D.T.; Hatziargyriou, N.; Akroud, N. Remote Laboratory Testing Demonstration. Energies 2020, 13, 2283. [Google Scholar] [CrossRef]
- Kotsampopoulos, P.; Georgilakis, P.; Lagos, D.T.; Kleftakis, V.; Hatziargyriou, N. FACTS Providing Grid Services: Applications and Testing. Energies 2019, 12, 2554. [Google Scholar] [CrossRef]
- Rizy, D.T.; Xu, Y.; Li, H.; Li, F.; Irminger, P. Volt/Var control using inverter-based distributed energy resources. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–8. [Google Scholar] [CrossRef]
- Huerta, F.; Gruber, J.K.; Prodanovic, M.; Matatagui, P. Power-hardware-in-the-loop test beds: Evaluation tools for grid integration of distributed energy resources. IEEE Ind. Appl. Mag. 2016, 22, 18–26. [Google Scholar] [CrossRef]
- Huerta, F.; Gruber, J.K.; Prodanovic, M.; Matatagui, P.; Gafurov, T. A laboratory environment for real-time testing of energy management scenarios: Smart Energy Integration Lab (SEIL). In Proceedings of the 2014 International Conference on Renewable Energy Research and Application (ICRERA), Glasgow, UK, 27–30 September 2014; pp. 514–519. [Google Scholar] [CrossRef]
- Darbali-Zamora, R.; Quiroz, J.E.; Hernández-Alvidrez, J.; Johnson, J.; Ortiz-Rivera, E.I. Validation of a Real-Time Power Hardware-in-the-Loop Distribution Circuit Simulation with Renewable Energy Sources. In Proceedings of the 2018 IEEE 7th World Conference on Photovoltaic Energy Conversion (WCPEC) (A Joint Conference of 45th IEEE PVSC, 28th PVSEC 34th EU PVSEC), Waikoloa, HI, USA, 10–15 June 2018; pp. 1380–1385. [Google Scholar] [CrossRef]
- Kikusato, H.; Ustun, T.S.; Suzuki, M.; Sugahara, S.; Hashimoto, J.; Otani, K.; Shirakawa, K.; Yabuki, R.; Watanabe, K.; Shimizu, T. Microgrid Controller Testing Using Power Hardware-in-the-Loop. Energies 2020, 13, 44. [Google Scholar] [CrossRef]
- Kotsampopoulos, P.C.; Kleftakis, V.A.; Hatziargyriou, N.D. Laboratory Education of Modern Power Systems Using PHIL Simulation. IEEE Trans. Power Syst. 2017, 32, 3992–4001. [Google Scholar] [CrossRef]
- Oureilidis, K.; Malamaki, K.N.; Gallos, K.; Tsitsimelis, A.; Dikaiakos, C.; Gkavanoudis, S.; Cvetkovic, M.; Mauricio, J.M.; Maza Ortega, J.M.; Ramos, J.L.M.; et al. Ancillary Services Market Design in Distribution Networks: Review and Identification of Barriers. Energies 2020, 13, 917. [Google Scholar] [CrossRef]
- Maza-Ortega, J.M.; Mauricio, J.M.; Barragán-Villarejo, M.; Demoulias, C.; Gómez-Expósito, A. Ancillary Services in Hybrid AC/DC Low Voltage Distribution Networks. Energies 2019, 12, 3591. [Google Scholar] [CrossRef]
- Yu, X.; Tolbert, L.M. Ancillary services provided from DER with power electronics interface. In Proceedings of the 2006 IEEE Power Engineering Society General Meeting, Montreal, QC, USA, 18–22 June 2006; p. 8. [Google Scholar] [CrossRef]
- Maza-Ortega, J.M.; Barragán-Villarejo, M.; García-López, F.d.P.; Jiménez, J.; Mauricio, J.M.; Alvarado-Barrios, L.; Gómez-Expósito, A. A Multi-Platform Lab for Teaching and Research in Active Distribution Networks. IEEE Trans. Power Syst. 2017, 32, 4861–4870. [Google Scholar] [CrossRef]
- García-López, F.d.P.; Barragán-Villarejo, M.; Marano-Marcolini, A.; Maza-Ortega, J.M.; Martínez-Ramos, J.L. Experimental Assessment of a Centralised Controller for High-RES Active Distribution Networks. Energies 2018, 11, 3364. [Google Scholar] [CrossRef]
- De Paula García-López, F.; Barragán-Villarejo, M.; Maza-Ortega, J.M. Grid-friendly integration of electric vehicle fast charging station based on multiterminal DC link. Int. J. Electr. Power Energy Syst. 2020, 114, 105341. [Google Scholar] [CrossRef]
- Carpita, M.; Affolter, J.; Bozorg, M.; Houmard, D.; Wasterlain, S. ReIne, a flexible laboratory for emulating and testing the Distribution grid. In Proceedings of the 2019 21st European Conference on Power Electronics and Applications (EPE ’19 ECCE Europe), Genova, Italy, 2–6 September 2019; pp. P.1–P.6. [Google Scholar] [CrossRef]
- Orue, I.; Larrieta, J.; Gilbert, I.P. Development and requirements of a new High Power Laboratory. In Proceedings of the IEEE PES T&D 2010, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Torres, M.; Lopes, L. Inverter-Based Diesel Generator Emulator for the Study of Frequency Variations in a Laboratory-Scale Autonomous Power System. Energy Power Eng. 2013, 5, 274–283. [Google Scholar] [CrossRef]
- Liu, Y.; Lan, P.; Lin, H. Grid-connected PV inverter test system for solar photovoltaic power system certification. In Proceedings of the 2014 IEEE PES General Meeting|Conference Exposition, Washington, DC, USA, 27–31 July 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Chinchilla, M.; Arnaltes, S.; Rodriguez-Amenedo, J.L. Laboratory set-up for wind turbine emulation. In Proceedings of the 2004 IEEE International Conference on Industrial Technology, IEEE ICIT ’04, Hammamet, Tunisia, 8–10 December 2004; Volume 1, pp. 553–557. [Google Scholar] [CrossRef]
- Sanchez, S.; D’Arco, S.; Holdyk, A.; Tedeschi, E. An approach for small scale power hardware in the loop emulation of HVDC cables. In Proceedings of the 2018 Thirteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 10–12 April 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Aktas, A.; Erhan, K.; Ozdemir, S.; Ozdemir, E. Experimental investigation of a new smart energy management algorithm for a hybrid energy storage system in smart grid applications. Electr. Power Syst. Res. 2017, 144, 185–196. [Google Scholar] [CrossRef]
- Zecchino, A.; Hu, J.; Coppo, M.; Marinelli, M. Experimental testing and model validation of a decoupled-phase on-load tap-changer transformer in an active network. IET Gener. Transm. Distrib. 2016, 10, 3834–3843. [Google Scholar] [CrossRef]
- Papaspiliotopoulos, V.A.; Korres, G.N.; Kleftakis, V.A.; Hatziargyriou, N.D. Hardware-In-the-Loop Design and Optimal Setting of Adaptive Protection Schemes for Distribution Systems With Distributed Generation. IEEE Trans. Power Deliv. 2017, 32, 393–400. [Google Scholar] [CrossRef]
- Madureira, A.G.; Lopes, J.A.P. Coordinated voltage support in distribution networks with distributed generation and microgrids. IET Renew. Power Gener. 2009, 3, 439–454. [Google Scholar] [CrossRef]
- Fang, J.; Tang, Y.; Li, H.; Blaabjerg, F. The Role of Power Electronics in Future Low Inertia Power Systems. In Proceedings of the 2018 IEEE International Power Electronics and Application Conference and Exposition (PEAC), Shenzhen, China, 4–7 November 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. On the Inertia of Future More-Electronics Power Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 2130–2146. [Google Scholar] [CrossRef]
- Dimitra Tragianni, S.; Oureilidis, K.O.; Demoulias, C.S. Supercapacitor sizing based on comparative study of PV power smoothing methods. In Proceedings of the 2017 52nd International Universities Power Engineering Conference (UPEC), Heraklion, Greece, 28–31 August 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Lashab, A.; Sera, D.; Guerrero, J.M. A Dual-Discrete Model Predictive Control-Based MPPT for PV Systems. IEEE Trans. Power Electron. 2019, 34, 9686–9697. [Google Scholar] [CrossRef]
- Mei, Q.; Shan, M.; Liu, L.; Guerrero, J.M. A Novel Improved Variable Step-Size Incremental-Resistance MPPT Method for PV Systems. IEEE Trans. Ind. Electron. 2011, 58, 2427–2434. [Google Scholar] [CrossRef]
- Nieves-Portana, M.; Barragán-Villarejo, M.; Maza-Ortega, J.; Mauricio-Ferramola, J. Reduction of Zero Sequence Components in Three-Phase Transformerless Multiterminal DC link based on Voltage Source Converters. Renew. Energy Power Qual. J. 2013, 1206–1211. [Google Scholar] [CrossRef]
- Harnefors, L.; Wang, X.; Yepes, A.G.; Blaabjerg, F. Passivity-Based Stability Assessment of Grid-Connected VSCs—An Overview. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 116–125. [Google Scholar] [CrossRef]
- Song, I.; Jung, W.; Kim, J.; Yun, S.; Choi, J.; Ahn, S. Operation Schemes of Smart Distribution Networks With Distributed Energy Resources for Loss Reduction and Service Restoration. IEEE Trans. Smart Grid 2013, 4, 367–374. [Google Scholar] [CrossRef]
- Fahmy, B.N.; Soliman, M.H.; Talaat, H.E. Active Voltage Control in Distribution Networks including Distributed Generations using Hardware-In-The-Loop Technique. In Proceedings of the 2019 21st International Middle East Power Systems Conference, MEPCON 2019, Cairo, Egypt, 17–19 December 2019; pp. 656–661. [Google Scholar] [CrossRef]
- Ko, M.S.; Lim, S.H.; Kim, J.K.; Hur, K. Distribution voltage regulation using combined local and central control based on real-time data. In Proceedings of the 2019 IEEE Milan PowerTech, PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Fandi, G.; Ahmad, I.; Igbinovia, F.O.; Muller, Z.; Tlusty, J.; Krepl, V. Voltage Regulation and Power Loss Minimization in Radial Distribution Systems via Reactive Power Injection and Distributed Generation Unit Placement. Energies 2018, 11, 1399. [Google Scholar] [CrossRef]
- Kulmala, A.; Angioni, A.; Repo, S.; Giustina, D.D.; Barbato, A.; Ponci, F. Experiences of Laboratory and Field Demonstrations of Distribution Network Congestion Management. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 3543–3549. [Google Scholar] [CrossRef]
- Karagiannopoulos, S.; Gallmann, J.; Vayá, M.G.; Aristidou, P.; Hug, G. Active Distribution Grids Offering Ancillary Services in Islanded and Grid-Connected Mode. IEEE Trans. Smart Grid 2020, 11, 623–633. [Google Scholar] [CrossRef]
- Lauss, G.; Strunz, K. Multirate Partitioning Interface for Enhanced Stability of Power Hardware-in-the-Loop Real-Time Simulation. IEEE Trans. Ind. Electron. 2019, 66, 595–605. [Google Scholar] [CrossRef]
- Li, Y.; Nejabatkhah, F. Overview of control, integration and energy management of microgrids. J. Mod. Power Syst. Clean Energy 2014, 2, 212–222. [Google Scholar] [CrossRef]
- Nehrir, M.H.; Wang, C.; Strunz, K.; Aki, H.; Ramakumar, R.; Bing, J.; Miao, Z.; Salameh, Z. A Review of Hybrid Renewable/Alternative Energy Systems for Electric Power Generation: Configurations, Control, and Applications. IEEE Trans. Sustain. Energy 2011, 2, 392–403. [Google Scholar] [CrossRef]
- Katiraei, F.; Iravani, R.; Hatziargyriou, N.; Dimeas, A. Microgrids management. IEEE Power Energy Mag. 2008, 6, 54–65. [Google Scholar] [CrossRef]
- Colet-Subirachs, A.; Ruiz-Alvarez, A.; Gomis-Bellmunt, O.; Alvarez-Cuevas-Figuerola, F.; Sudria-Andreu, A. Centralized and Distributed Active and Reactive Power Control of a Utility Connected Microgrid Using IEC61850. IEEE Syst. J. 2012, 6, 58–67. [Google Scholar] [CrossRef]
- Zhao, P.; Suryanarayanan, S.; Simoes, M.G. An Energy Management System for Building Structures Using a Multi-Agent Decision-Making Control Methodology. IEEE Trans. Ind. Appl. 2013, 49, 322–330. [Google Scholar] [CrossRef]
- Tehrani, K. A smart cyber physical multi-source energy system for an electric vehicle prototype. J. Syst. Archit. 2020, 111, 101804. [Google Scholar] [CrossRef]
- Guerrero, J.M.; de Vicuna, L.G.; Matas, J.; Castilla, M.; Miret, J. A wireless controller to enhance dynamic performance of parallel inverters in distributed generation systems. IEEE Trans. Power Electron. 2004, 19, 1205–1213. [Google Scholar] [CrossRef]
- CIGRE. Benchmark Systems for Network Integration of Renewable and Distributed Energy Resources; Electra: Paris, France, 2019. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tested Element | Simulation | CHIL | PHIL | PSHIL |
|---|---|---|---|---|
| DUT | • | • | • | • |
| AUT | • | • | • | |
| AUT & DUT | • | • |
| Node | Generation (kW) | Load (kW) | ||
|---|---|---|---|---|
| PV | Wind Turbine | Industrial | Household | |
| N3 | 4.34 | 0.00 | 2.82 | 2.52 |
| N5 | 7.04 | 0.00 | 0.00 | 6.61 |
| N6 | 6.52 | 0.00 | 0.00 | 5.01 |
| N7 | 0.00 | 6.07 | 0.91 | 0.00 |
| N8 | 6.52 | 0.00 | 0.00 | 5.36 |
| N9 | 7.04 | 0.00 | 6.75 | 0.00 |
| N10 | 6.52 | 0.00 | 0.80 | 4.35 |
| N14 | 0.00 | 0.00 | 9.05 | 0.00 |
| Node | PV | Household |
|---|---|---|
| Generation (kW) | Load (kW) | |
| M7 | 15 | 15 |
| M8 | 52 | 52 |
| M9 | 55 | 55 |
| M10 | 35 | 35 |
| M11 | 47 | 47 |
| DUT/AUT | Case PSHIL-1 | Case PSHIL-2 | Case PSHIL-3 |
|---|---|---|---|
| MV/LV network interconnection | • | • | • |
| HV/MV OLTC | • | • | |
| MV DER reactive power | • | • | |
| DC link | • | • | |
| LV PV reactive power | • | ||
| Functionalities | |||
| Current control (DER, DC link) | • | • | |
| Reactive power control (DER, DC link) | • | • | |
| Active Power control (DC link) | • | • | |
| OLTC tap Control | • | • | |
| OPF for MV power losses minimization | • | • | |
| Local droop for LV voltage control | • |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barragán-Villarejo, M.; García-López, F.d.P.; Marano-Marcolini, A.; Maza-Ortega, J.M. Power System Hardware in the Loop (PSHIL): A Holistic Testing Approach for Smart Grid Technologies. Energies 2020, 13, 3858. https://doi.org/10.3390/en13153858
Barragán-Villarejo M, García-López FdP, Marano-Marcolini A, Maza-Ortega JM. Power System Hardware in the Loop (PSHIL): A Holistic Testing Approach for Smart Grid Technologies. Energies. 2020; 13(15):3858. https://doi.org/10.3390/en13153858
Chicago/Turabian StyleBarragán-Villarejo, Manuel, Francisco de Paula García-López, Alejandro Marano-Marcolini, and José María Maza-Ortega. 2020. "Power System Hardware in the Loop (PSHIL): A Holistic Testing Approach for Smart Grid Technologies" Energies 13, no. 15: 3858. https://doi.org/10.3390/en13153858
APA StyleBarragán-Villarejo, M., García-López, F. d. P., Marano-Marcolini, A., & Maza-Ortega, J. M. (2020). Power System Hardware in the Loop (PSHIL): A Holistic Testing Approach for Smart Grid Technologies. Energies, 13(15), 3858. https://doi.org/10.3390/en13153858