Synergies between e-Mobility and Photovoltaic Potentials—A Case Study on an Urban Medium Voltage Grid


Abstract
1. Introduction
2. Data Description
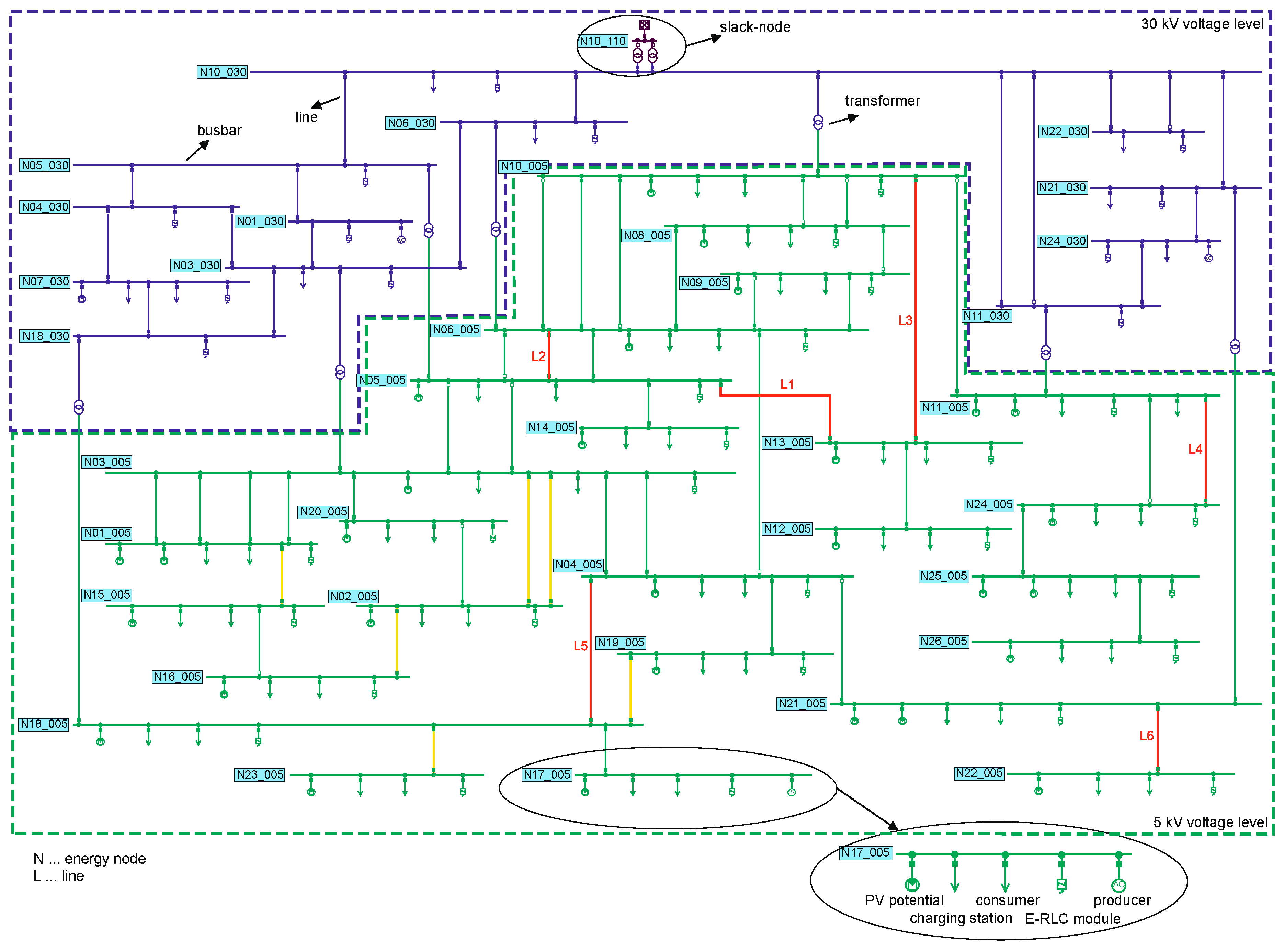
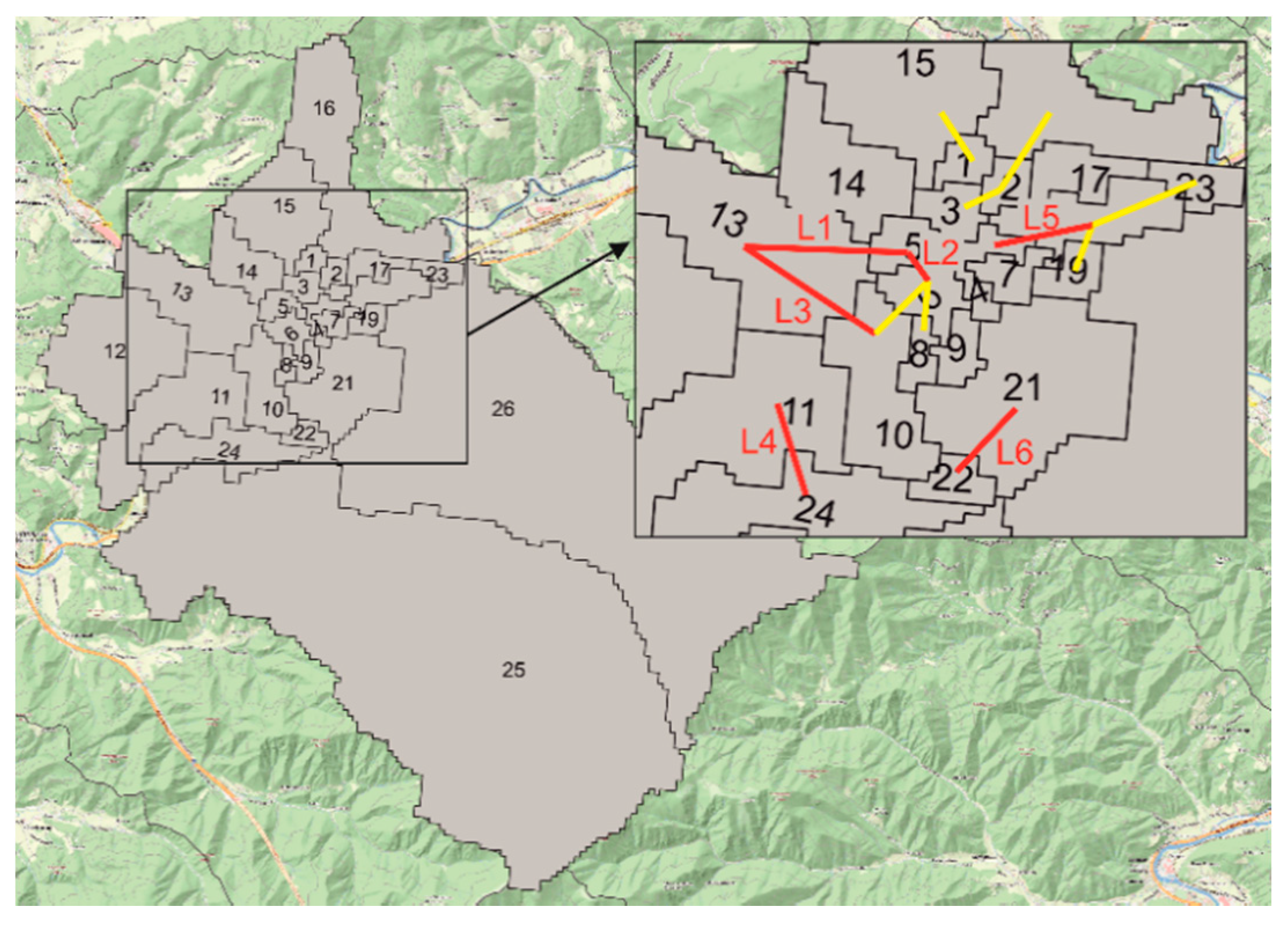
2.1. Medium-Voltage Grid
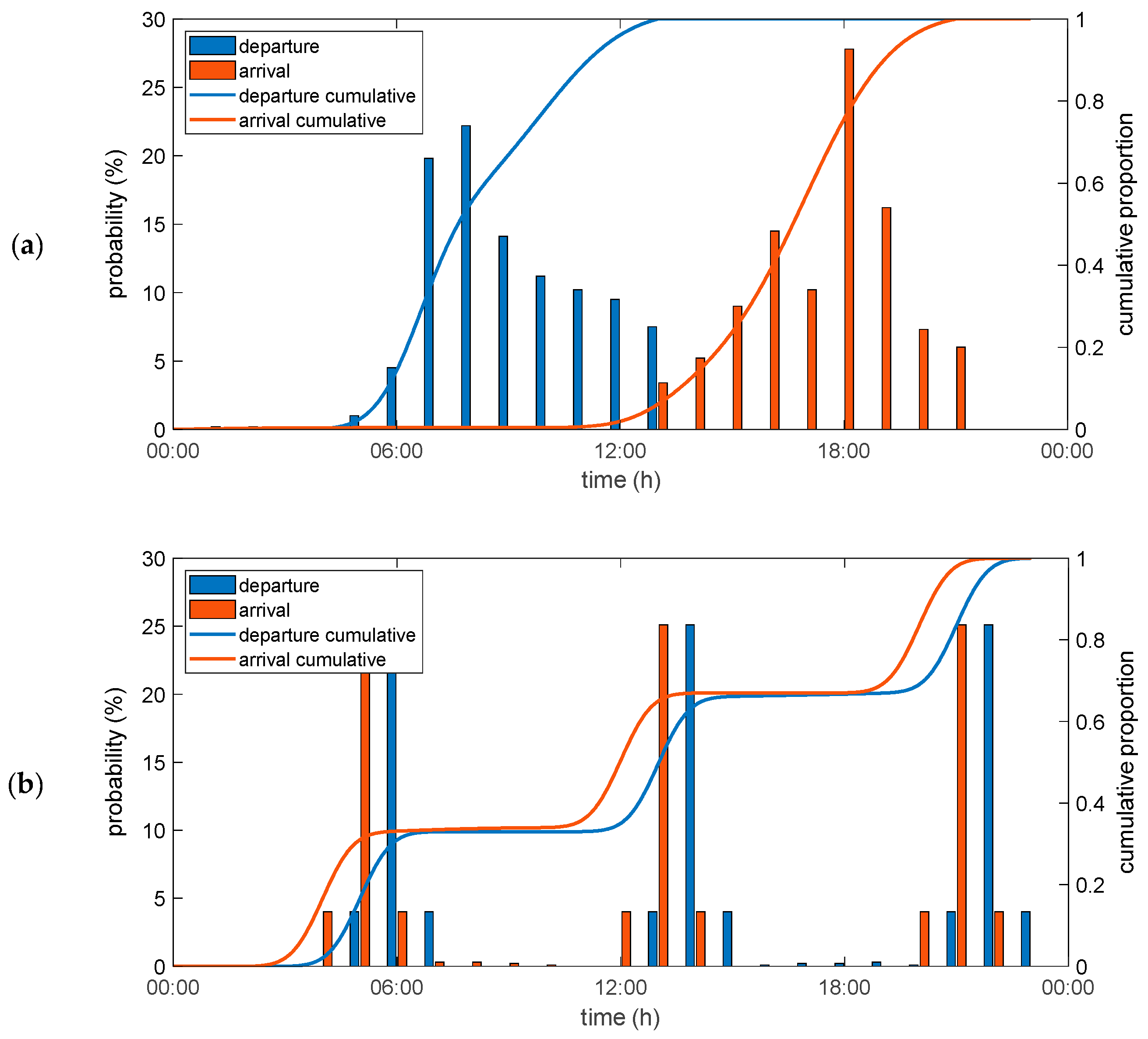
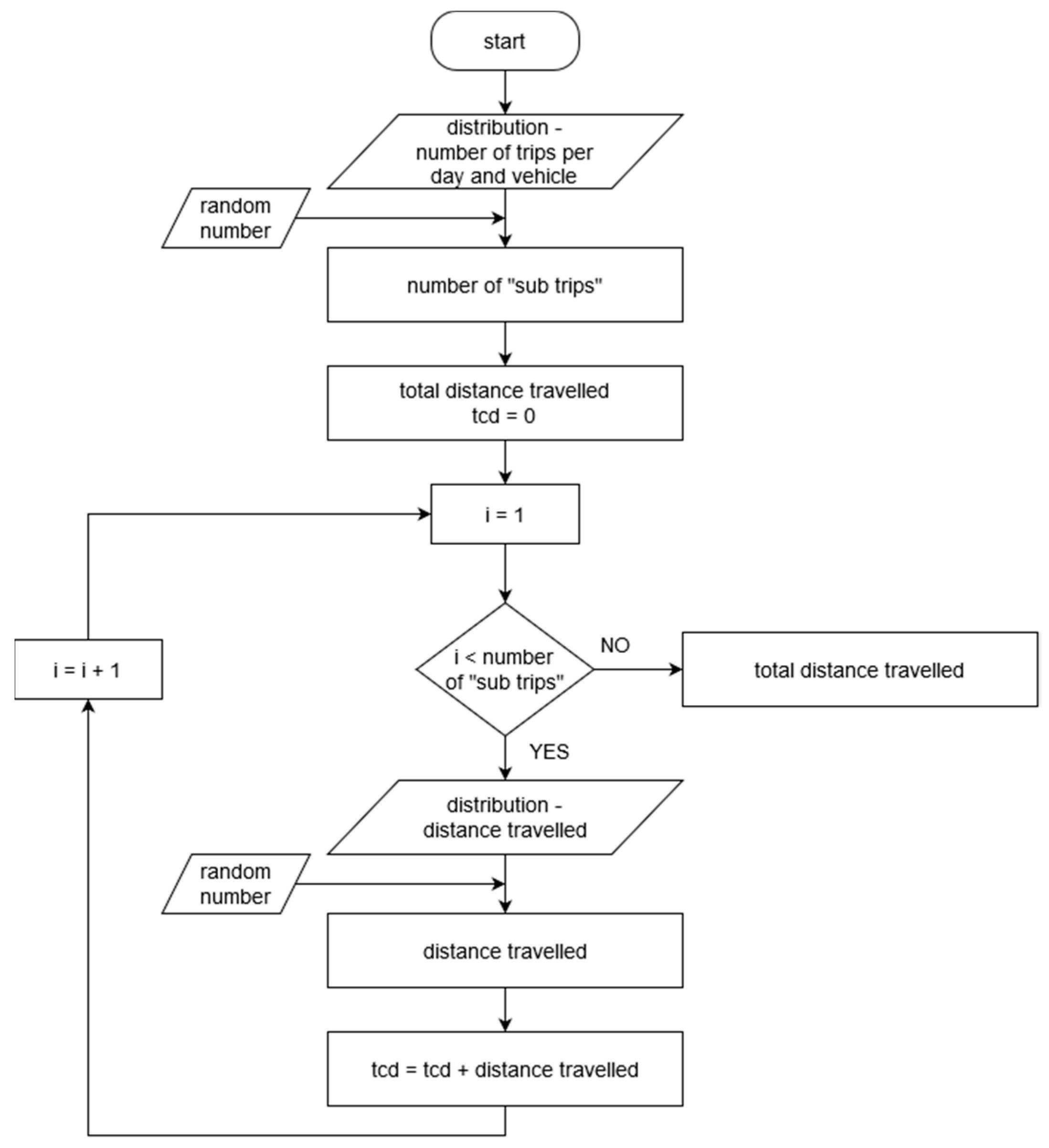
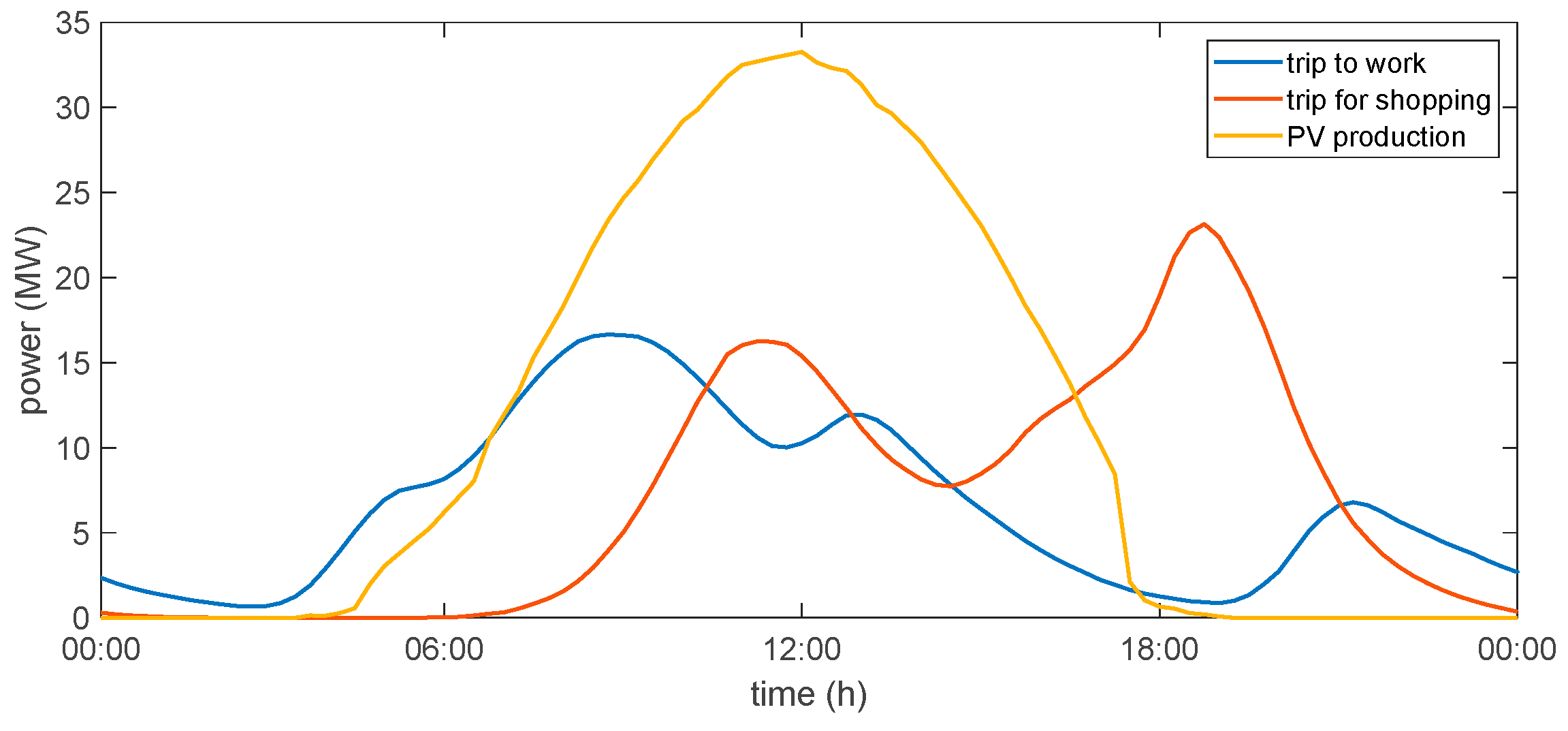
2.2. Traffic Analysis, Mobility Pattern and Traffic Model
2.3. PV Potential Profiles
3. Methods
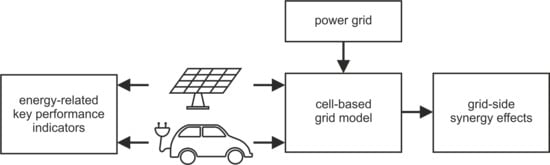
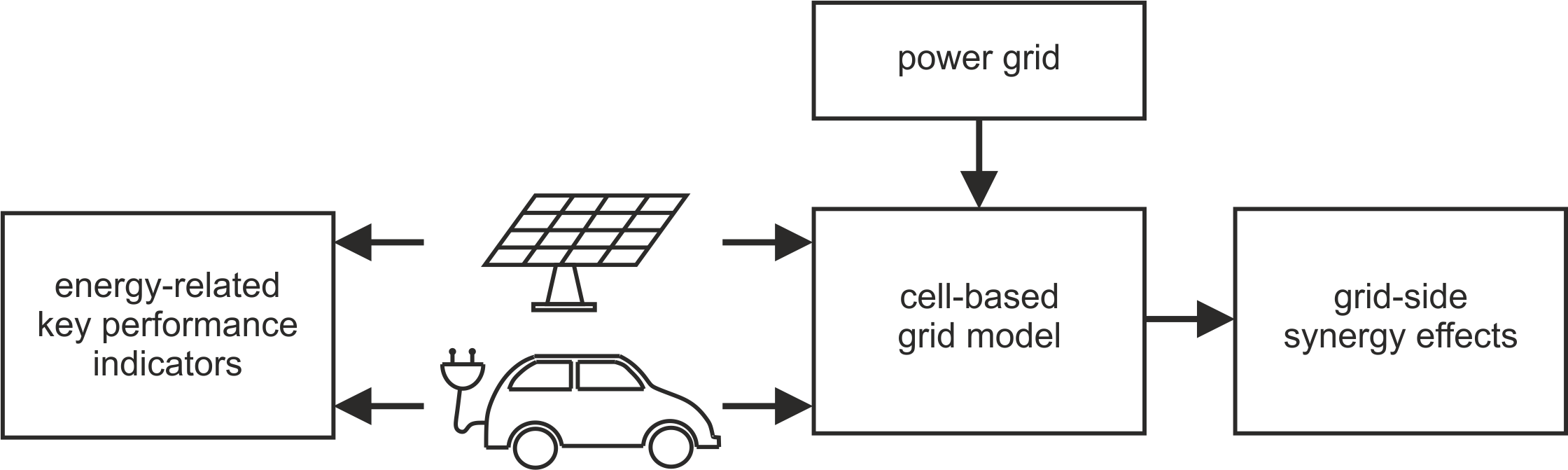
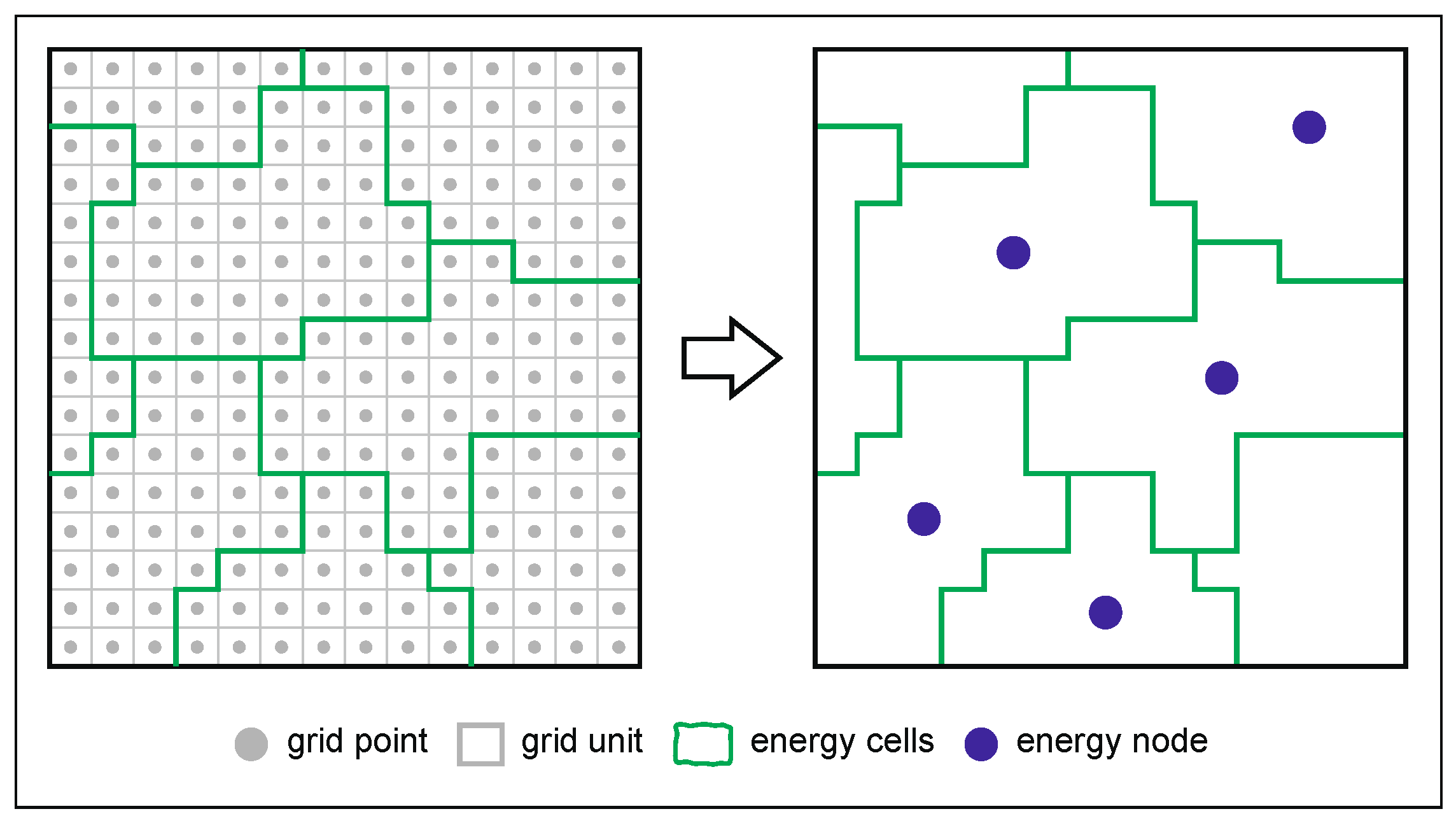
3.1. Cell-based Grid Model
3.2. Determination Load and Production Profiles
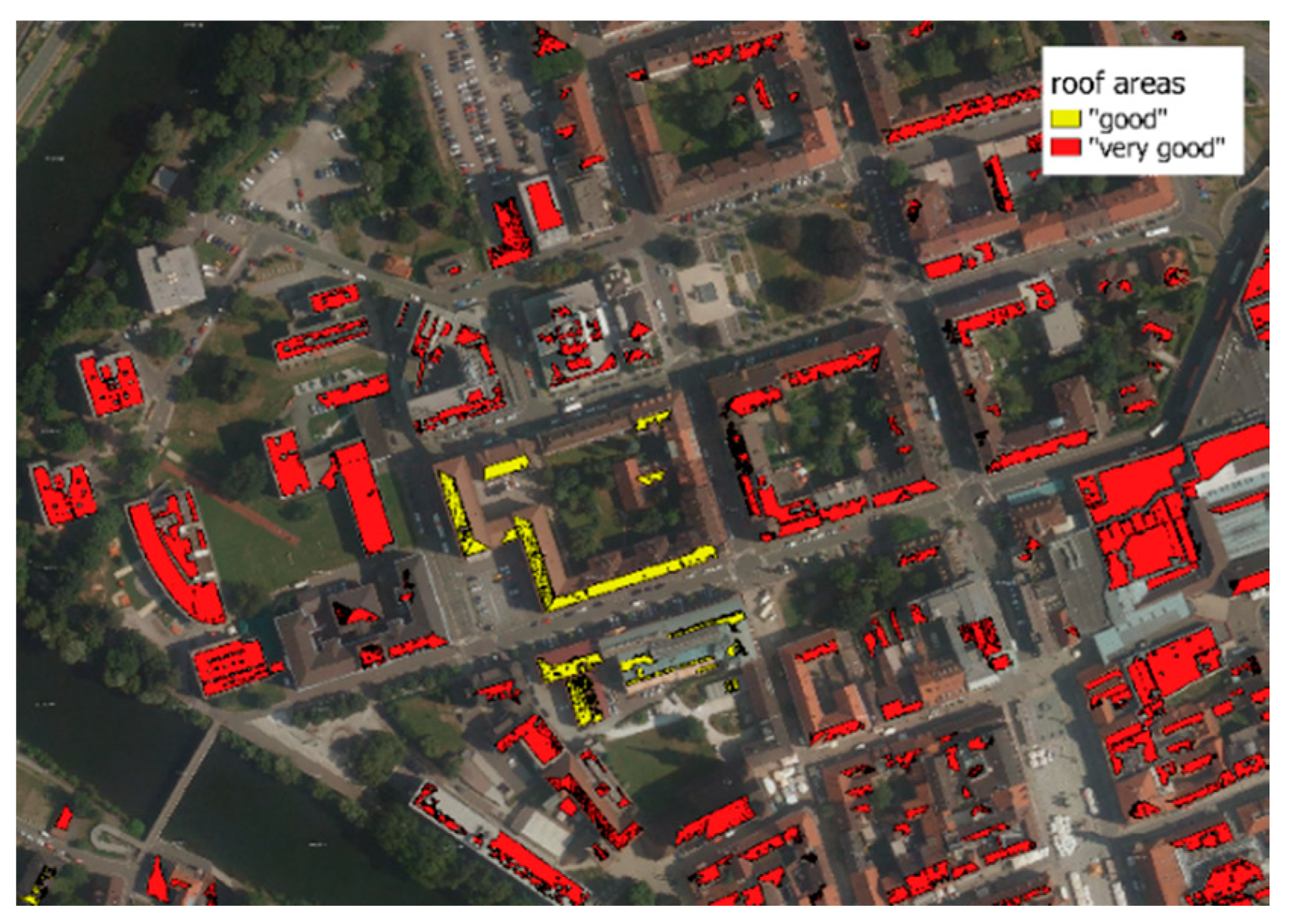
3.3. Determination of PV Potential Profiles
3.4. Simulation, Calculation and Evaluation
3.5. Scenario Definition
4. Results and Discussion
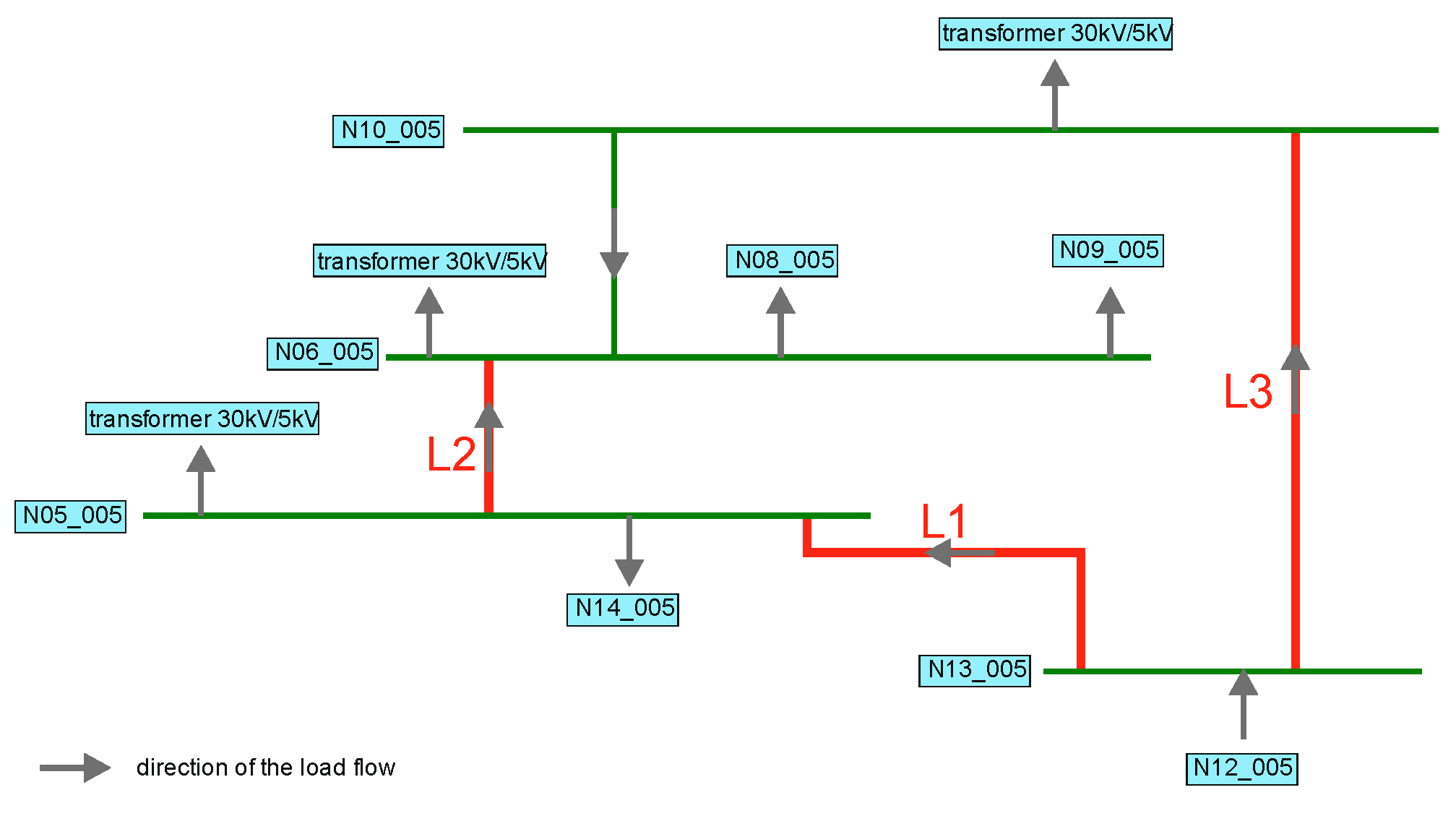
4.1. Cell-Based Grid Model
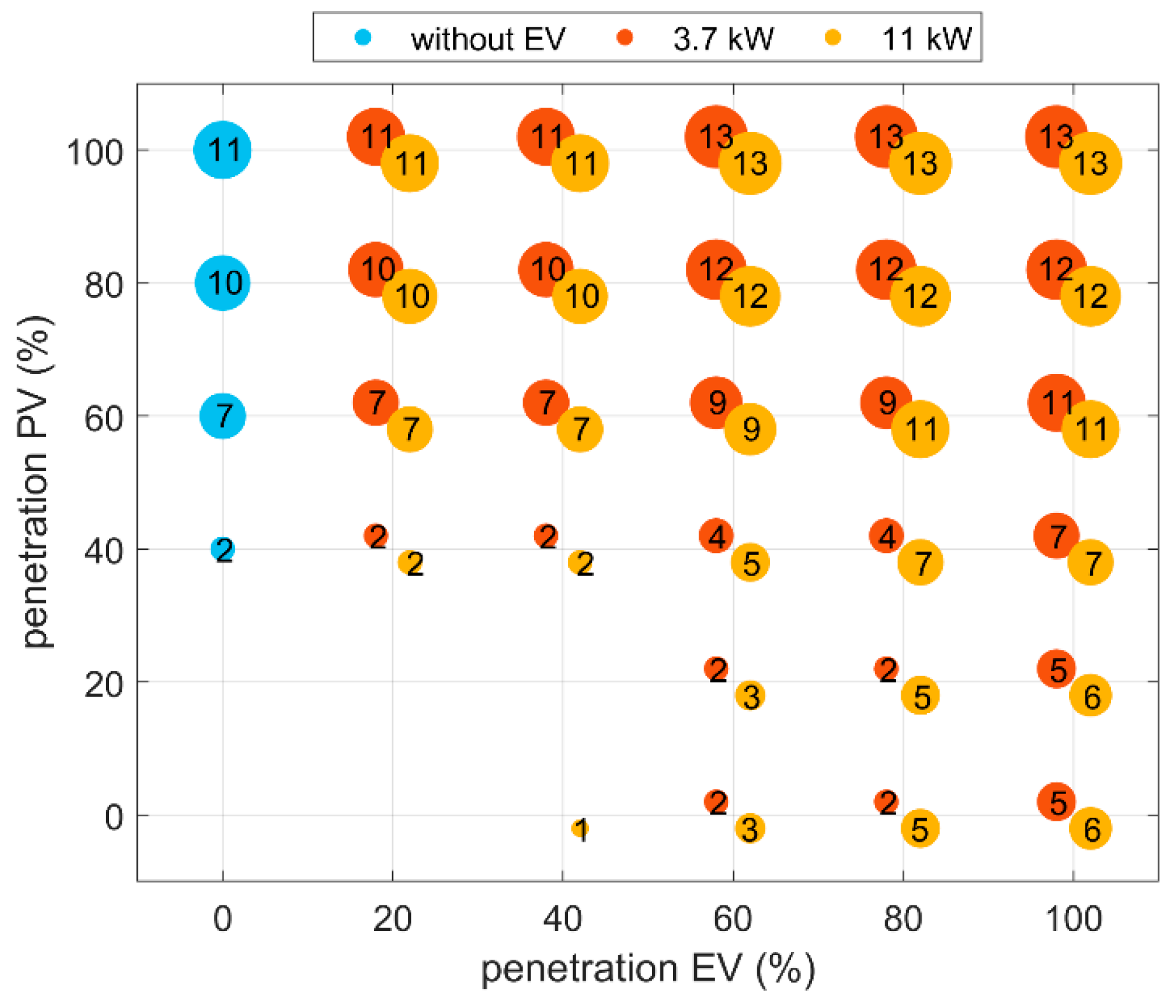
4.2. Grid-side Synergy Effects
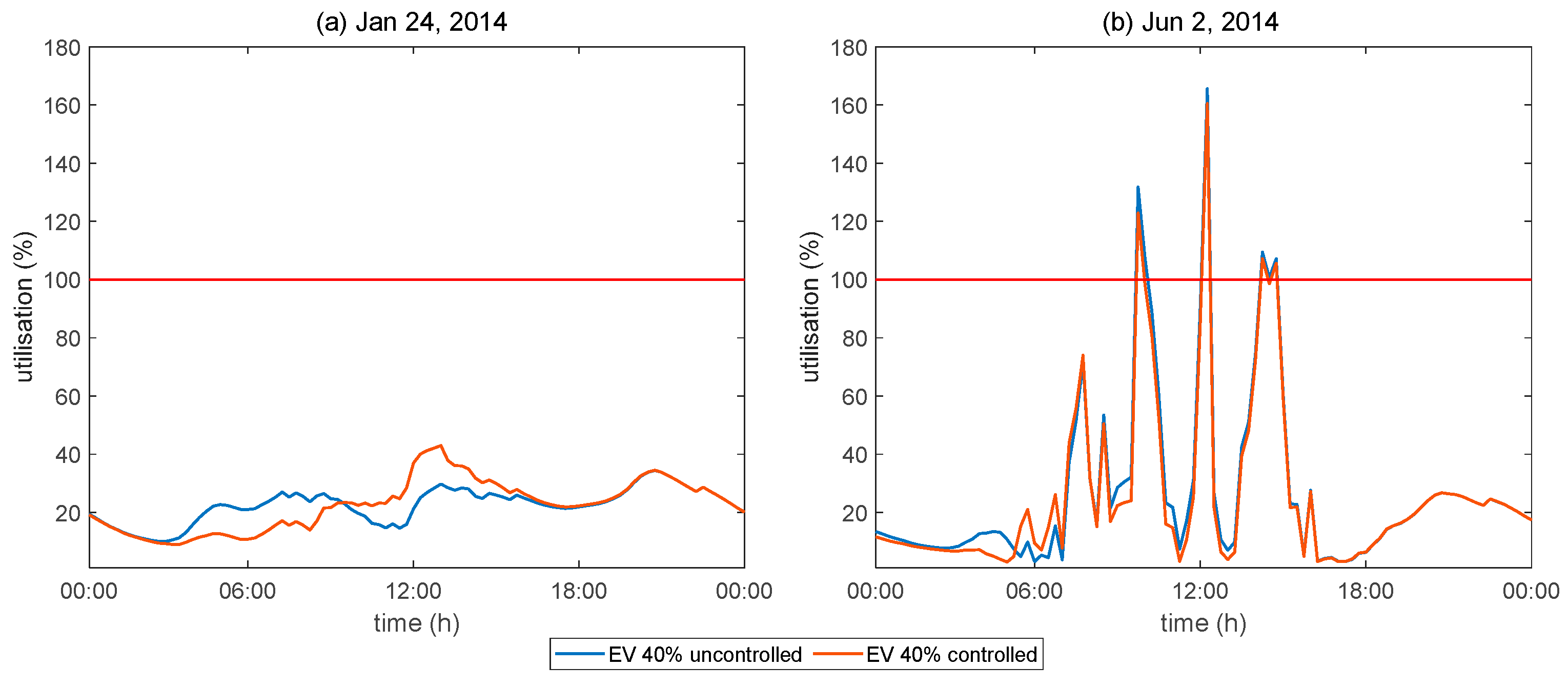
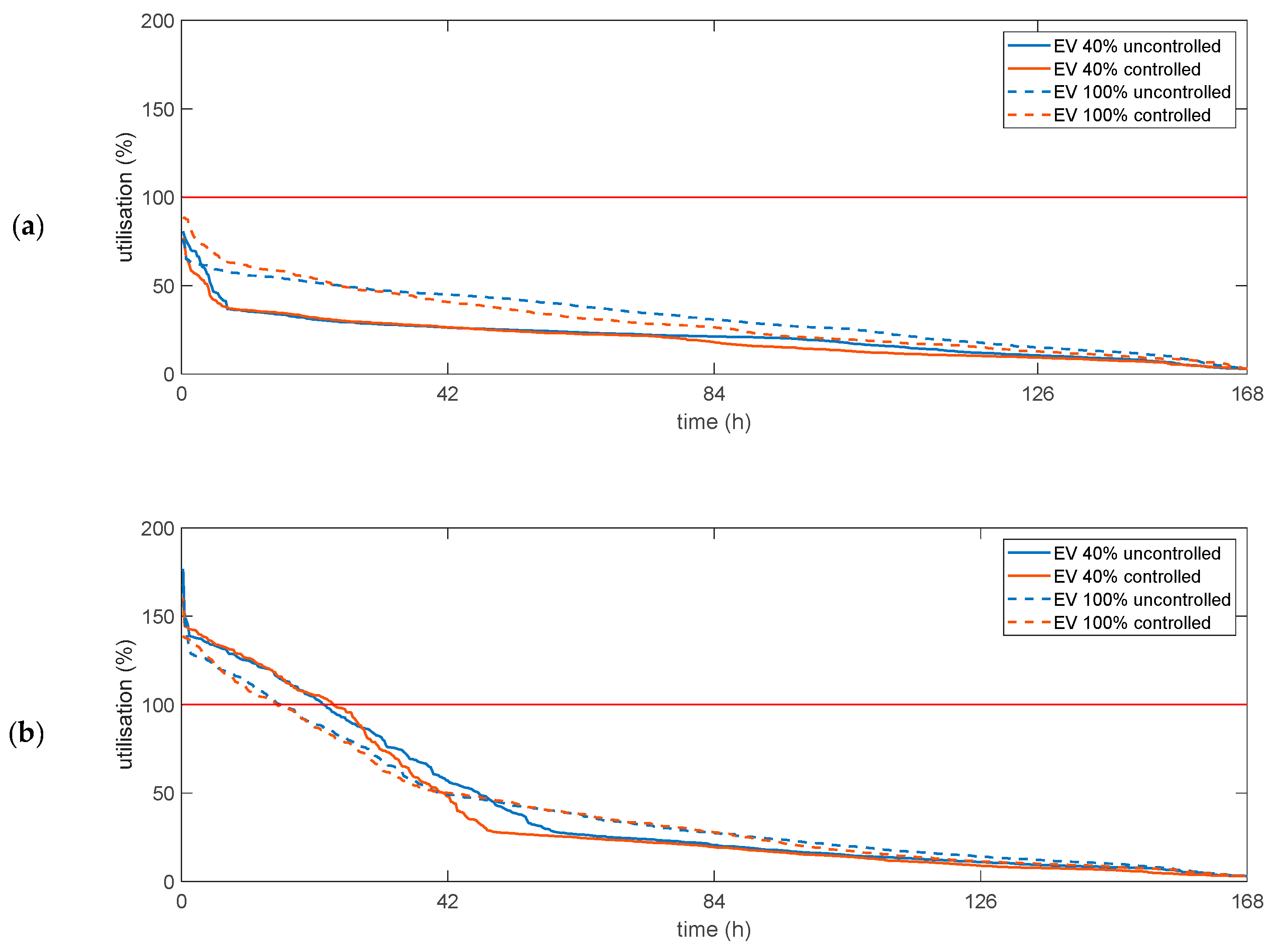
4.2.1. Charging Strategy 1 – Uncontrolled Charging
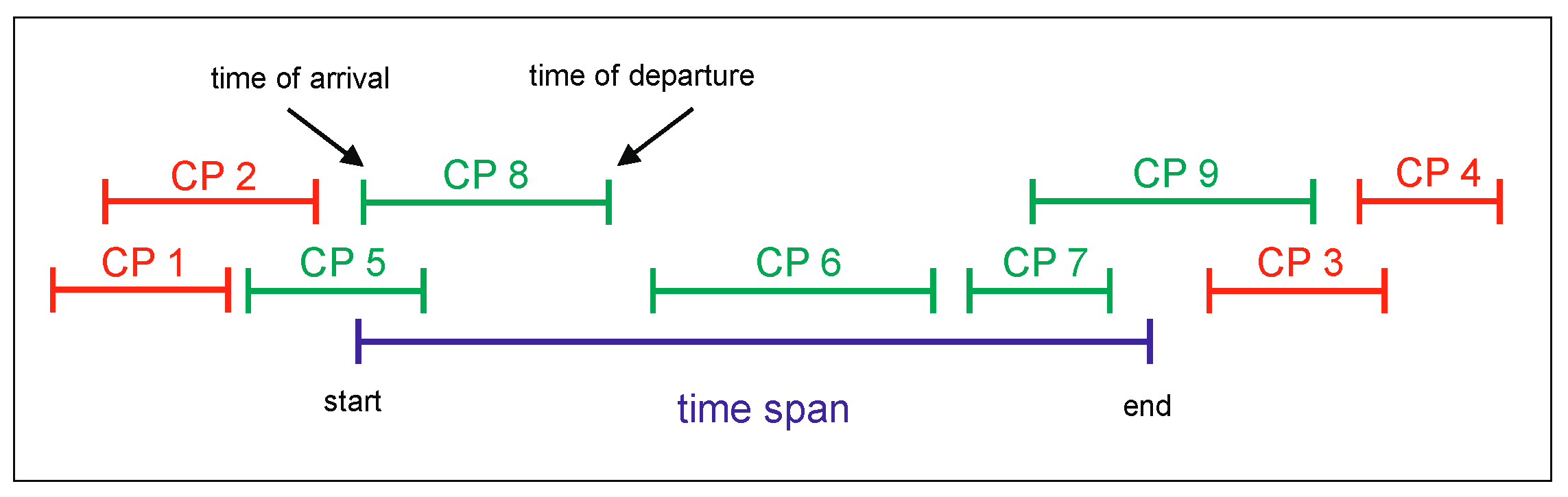
4.2.2. Charging Strategy 2—Controlled Charging
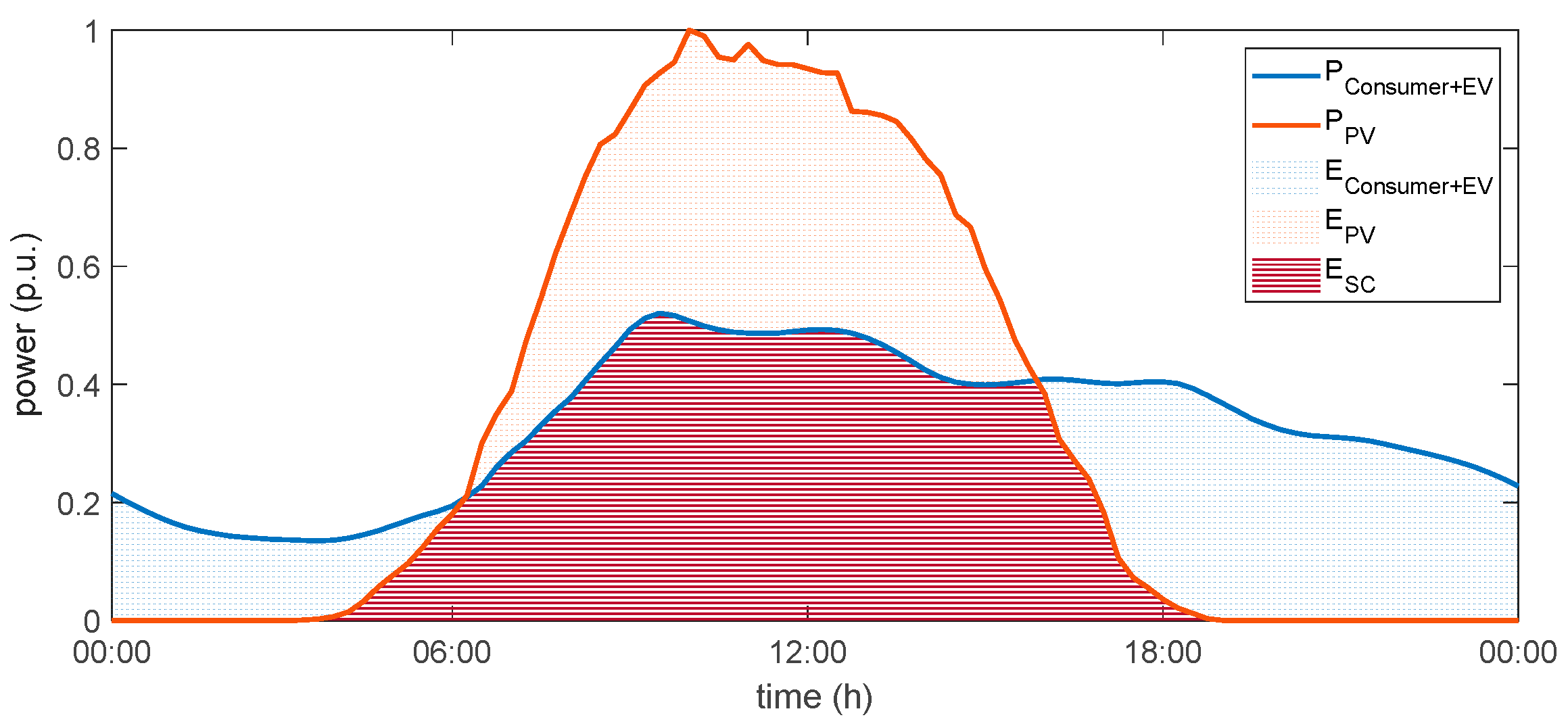
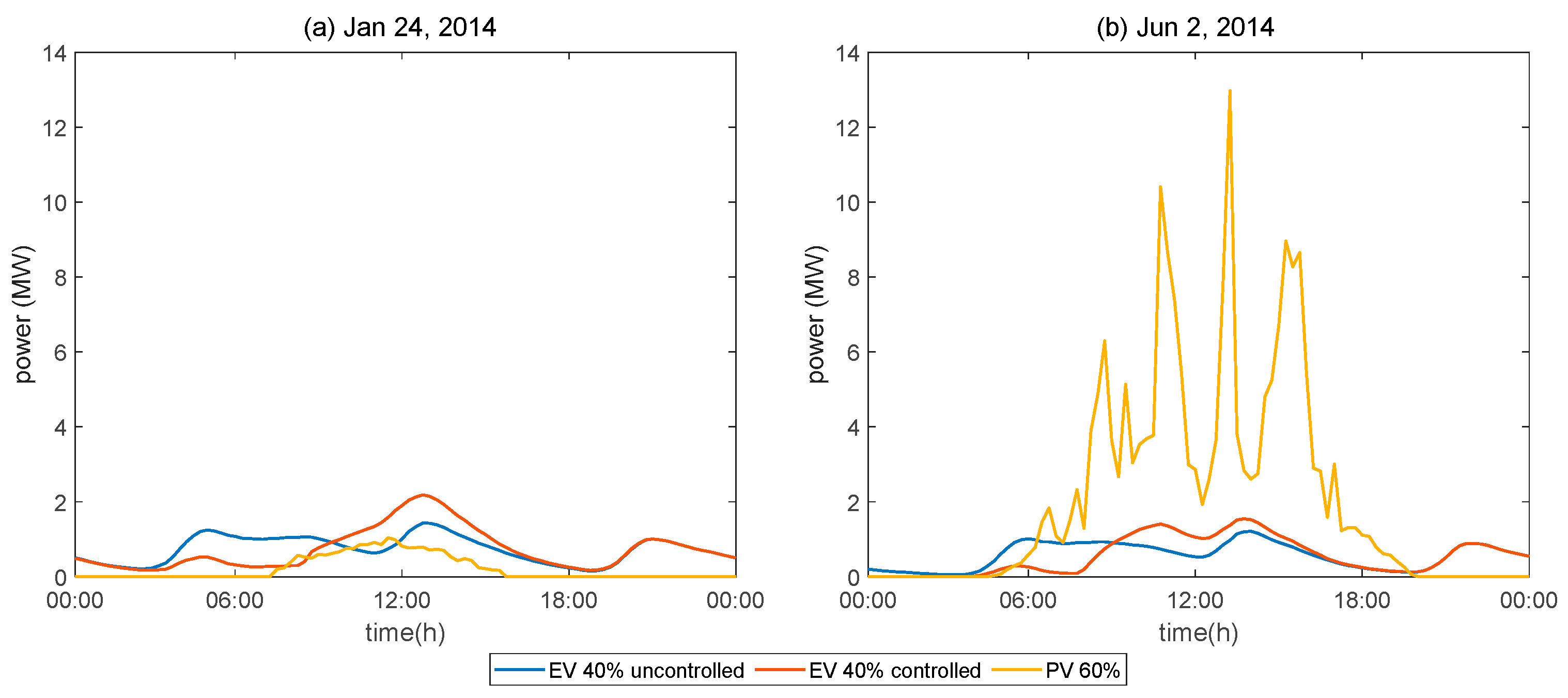
4.3. Energy Analyses
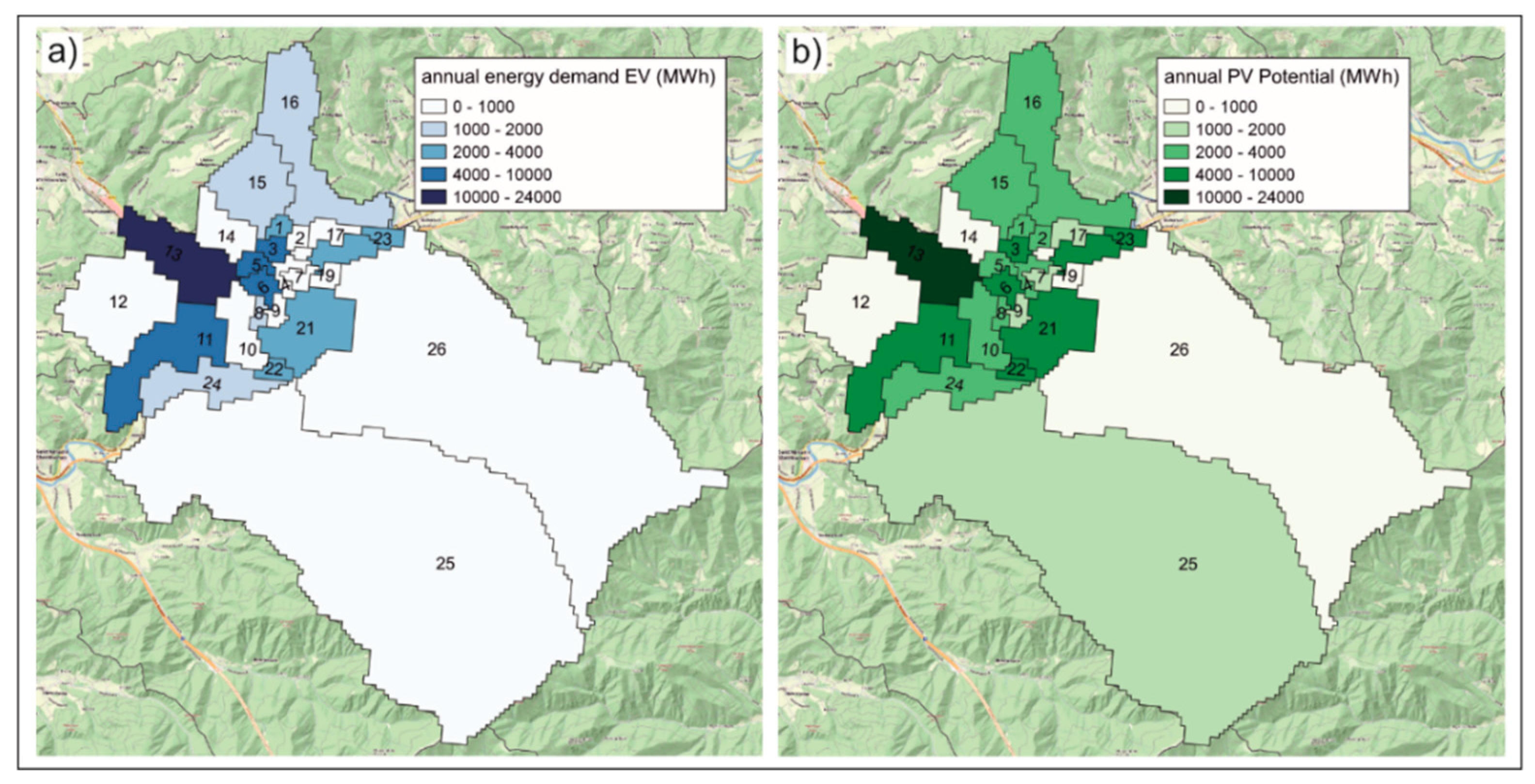
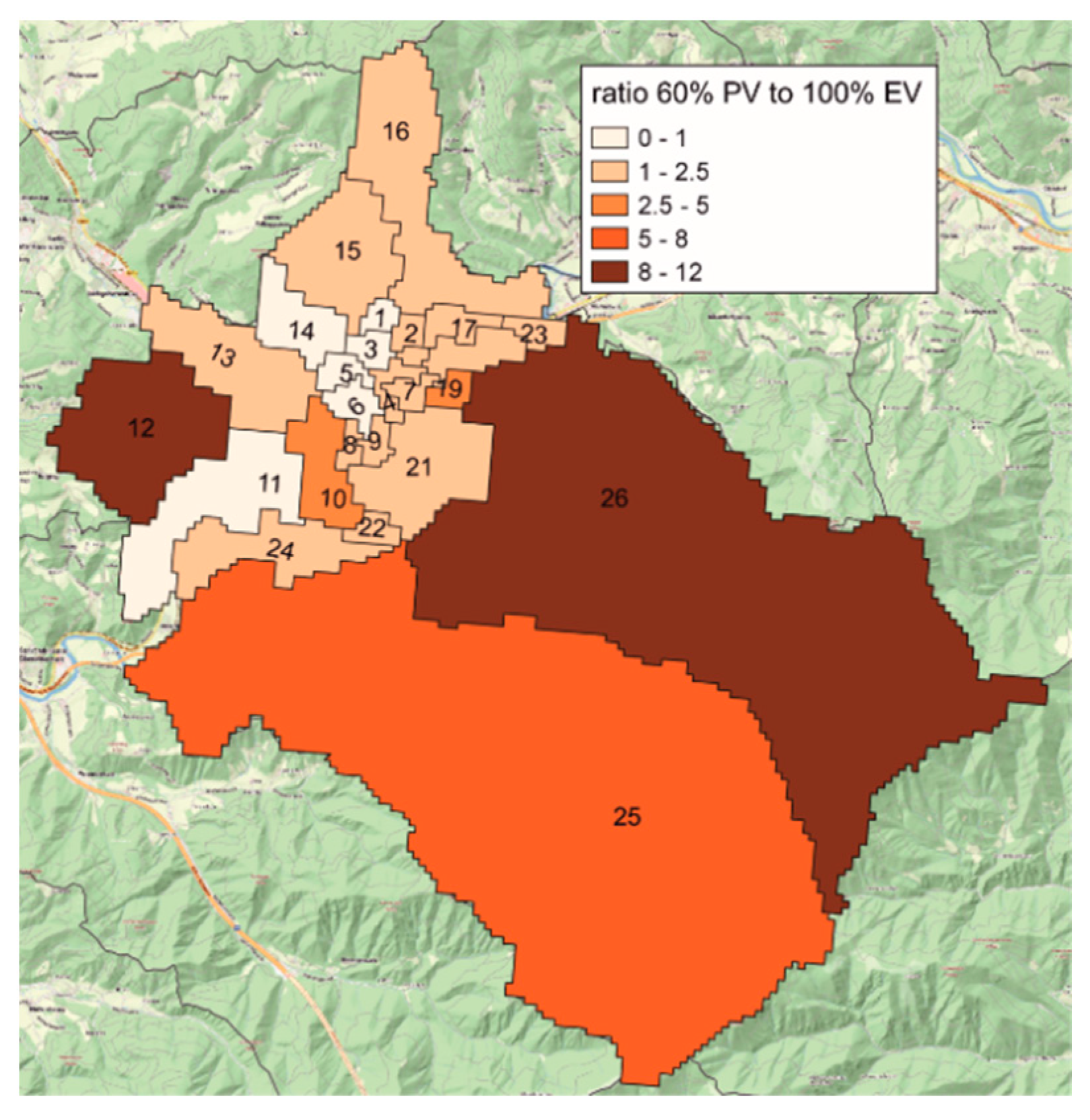
4.3.1. Interaction of Energy Surpluses between the Cells
4.3.2. Charging Strategy 1 – Uncontrolled Charging
4.3.3. Charging Strategy 2 – Controlled Charging
5. Conclusions
- To avoid line overloads, spatial planning is important in addition to the optimal energy and power ratio between e-mobility and PV potential.
- The optimal ratio between e-mobility and PV potential is limited by the seasonal component. This means, for example, while increasing e-mobility in summer counteracts negative effects of the PV potential, it leads to higher line utilisations in winter.
- Controlled charging for charging at work has only a minor positive effect on line overloads and key performance indicators.
Author Contributions
Funding
Conflicts of Interest
Appendix A
- A trip home
- ○
- number of residents
- ■
- number of residents arrivals and departures
- ■
- number of simultaneous residents vehicles
- ■
- average duration of stay
- ■
- average distance travelled
- ○
- number of visitors
- ■
- number of visitors arrivals and departures
- ■
- number of simultaneous visitor vehicles
- ■
- average duration of stay
- ■
- average distance travelled
- ○
- number of delivery trips
- ■
- number of delivery trips
- A trip to work with private or official car
- ○
- number of employees
- ■
- number of employee arrivals and departures
- ■
- number of simultaneous employee vehicles
- ■
- average duration of stay
- ■
- average distance travelled
- ○
- number of delivery trips
- ■
- number of delivery trips
- ○
- employers
- ■
- sector/industry
- ○
- number of business trips
- ■
- number of company vehicles
- ■
- number of company vehicle arrivals and departures
- ■
- number of simultaneous company vehicles
- ■
- average duration of stay for company vehicles
- ■
- average ride-distance company vehicles
- A trip for shopping
- ○
- Sales area per sector
- ○
- number of employees
- ■
- number of employee arrivals and departures
- ■
- number of simultaneous employee vehicles
- ■
- average duration of stay
- ■
- average distance travelled
- ○
- number of customers and visitors
- ■
- number of customers and visitor vehicles arrivals and departures
- ■
- number of simultaneous customers and visitors vehicles
- ■
- average duration of stay
- ■
- average distance travelled
- ○
- number of delivery trips
- ■
- number of delivery trips
- A trip for execution (e.g., doctor’s visit)
- ○
- number of employees
- ■
- number of employee arrivals and departures
- ■
- number of simultaneous employee vehicles
- ■
- average duration of stay
- ■
- average distance travelled
- ○
- number of customers and visitors
- ■
- number of customers and visitor vehicles arrivals and departures
- ■
- number of simultaneous customers and visitors vehicles
- ■
- average duration of stay
- ■
- average distance travelled
- ○
- number of delivery trips
- ■
- number of delivery trips
- A trip to leisure activities
- ○
- size (area)
- ○
- number of employees
- ■
- number of employee arrivals and departures
- ■
- number of simultaneous employee vehicles
- ■
- average duration of stay
- ■
- average distance travelled
- ○
- number of visitors per day
- ■
- number of customers and visitor vehicles arrivals and departures
- ■
- number of simultaneous customers and visitors vehicles
- ■
- average duration of stay
- ■
- average distance travelled
- ○
- number of delivery trips
- ■
- number of delivery trips
- A trip to education
- ○
- number of employees
- ■
- number of employee arrivals and departures
- ■
- number of simultaneous employee vehicles
- ■
- average duration of stay
- ■
- average distance travelled
- ○
- number of pupils/students
- ■
- number of employee arrivals and departures
- ■
- number of simultaneous employee vehicles
- ■
- average duration of stay
- ■
- average distance travelled
- ○
- number of delivery trips
- ■
- number of delivery trips
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
Penetration (%) |
CP (kW) | CS |
Penetration (%) |
CP (kW) | CS |
Penetration (%) |
CP (kW) | CS |
Penetration (%) |
CP (kW) | CS | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PV | EV | PV | EV | PV | EV | PV | EV | ||||||||
| 0 | 0* | 0 | 0 | ||||||||||||
| 0 | 20 | 3.7 | 1 | 0 | 20 | 11 | 1 | 0 | 20 | 3.7 | 2 | 0 | 20 | 11 | 2 |
| 0 | 40 | 3.7 | 1 | 0 | 40 | 11 | 1 | 0 | 40 | 3.7 | 2 | 0 | 40 | 11 | 2 |
| 0 | 60 | 3.7 | 1 | 0 | 60 | 11 | 1 | 0 | 60 | 3.7 | 2 | 0 | 60 | 11 | 2 |
| 0 | 80 | 3.7 | 1 | 0 | 80 | 11 | 1 | 0 | 80 | 3.7 | 2 | 0 | 80 | 11 | 2 |
| 0 | 100 | 3.7 | 1 | 0 | 100 | 11 | 1 | 0 | 100 | 3.7 | 2 | 0 | 100 | 11 | 2 |
| 20 | 0* | 0 | 0 | ||||||||||||
| 20 | 20 | 3.7 | 1 | 20 | 20 | 11 | 1 | 20 | 20 | 3.7 | 2 | 20 | 20 | 11 | 2 |
| 20 | 40 | 3.7 | 1 | 20 | 40 | 11 | 1 | 20 | 40 | 3.7 | 2 | 20 | 40 | 11 | 2 |
| 20 | 60 | 3.7 | 1 | 20 | 60 | 11 | 1 | 20 | 60 | 3.7 | 2 | 20 | 60 | 11 | 2 |
| 20 | 80 | 3.7 | 1 | 20 | 80 | 11 | 1 | 20 | 80 | 3.7 | 2 | 20 | 80 | 11 | 2 |
| 20 | 100 | 3.7 | 1 | 20 | 100 | 11 | 1 | 20 | 100 | 3.7 | 2 | 20 | 100 | 11 | 2 |
| 40 | 0 | 3.7 | 1 | 40 | 0 | 11 | 1 | 40 | 0 | 3.7 | 2 | 40 | 0 | 11 | 2 |
| 40 | 20 | 3.7 | 1 | 40 | 20 | 11 | 1 | 40 | 20 | 3.7 | 2 | 40 | 20 | 11 | 2 |
| 40 | 40 | 3.7 | 1 | 40 | 40 | 11 | 1 | 40 | 40 | 3.7 | 2 | 40 | 40 | 11 | 2 |
| 40 | 60 | 3.7 | 1 | 40 | 60 | 11 | 1 | 40 | 60 | 3.7 | 2 | 40 | 60 | 11 | 2 |
| 40 | 80 | 3.7 | 1 | 40 | 80 | 11 | 1 | 40 | 80 | 3.7 | 2 | 40 | 80 | 11 | 2 |
| 40 | 100 | 3.7 | 1 | 40 | 100 | 11 | 1 | 40 | 100 | 3.7 | 2 | 40 | 100 | 11 | 2 |
| 60 | 0* | 0 | 0 | ||||||||||||
| 60 | 20 | 3.7 | 1 | 60 | 20 | 11 | 1 | 60 | 20 | 3.7 | 2 | 60 | 20 | 11 | 2 |
| 60 | 40 | 3.7 | 1 | 60 | 40 | 11 | 1 | 60 | 40 | 3.7 | 2 | 60 | 40 | 11 | 2 |
| 60 | 60 | 3.7 | 1 | 60 | 60 | 11 | 1 | 60 | 60 | 3.7 | 2 | 60 | 60 | 11 | 2 |
| 60 | 80 | 3.7 | 1 | 60 | 80 | 11 | 1 | 60 | 80 | 3.7 | 2 | 60 | 80 | 11 | 2 |
| 60 | 100 | 3.7 | 1 | 60 | 100 | 11 | 1 | 60 | 100 | 3.7 | 2 | 60 | 100 | 11 | 2 |
| 80 | 0 | 0 | 0 | ||||||||||||
| 80 | 20 | 3.7 | 1 | 80 | 20 | 11 | 1 | 80 | 20 | 3.7 | 2 | 80 | 20 | 11 | 2 |
| 80 | 40 | 3.7 | 1 | 80 | 40 | 11 | 1 | 80 | 40 | 3.7 | 2 | 80 | 40 | 11 | 2 |
| 80 | 60 | 3.7 | 1 | 80 | 60 | 11 | 1 | 80 | 60 | 3.7 | 2 | 80 | 60 | 11 | 2 |
| 80 | 80 | 3.7 | 1 | 80 | 80 | 11 | 1 | 80 | 80 | 3.7 | 2 | 80 | 80 | 11 | 2 |
| 80 | 100 | 3.7 | 1 | 80 | 100 | 11 | 1 | 80 | 100 | 3.7 | 2 | 80 | 100 | 11 | 2 |
| 100 | 0* | 0 | 0 | ||||||||||||
| 100 | 20 | 3.7 | 1 | 100 | 20 | 11 | 1 | 100 | 20 | 3.7 | 2 | 100 | 20 | 11 | 2 |
| 100 | 40 | 3.7 | 1 | 100 | 40 | 11 | 1 | 100 | 40 | 3.7 | 2 | 100 | 40 | 11 | 2 |
| 100 | 60 | 3.7 | 1 | 100 | 60 | 11 | 1 | 100 | 60 | 3.7 | 2 | 100 | 60 | 11 | 2 |
| 100 | 80 | 3.7 | 1 | 100 | 80 | 11 | 1 | 100 | 80 | 3.7 | 2 | 100 | 80 | 11 | 2 |
| 100 | 100 | 3.7 | 1 | 100 | 100 | 11 | 1 | 100 | 100 | 3.7 | 2 | 100 | 100 | 11 | 2 |
| Brand of Car | Model | Battery Capacity [28] (kWh) | Average Energy Consumption [28] (kWh/100 km) |
|---|---|---|---|
| Audi | E-tron | 95.0 | 23.7 |
| BMW | i3 | 27.2 | 18.4 |
| Hyundai | Ioniq Elektro | 28.0 | 14.7 |
| Hyundai | Kona | 64.0 | 19.5 |
| Nissan | e-NV 200 | 40.0 | 28.1 |
| Nissan | Leaf | 40.0 | 22.1 |
| Renault | Zoe | 41.0 | 20.3 |
| VW | e-Golf | 34.9 | 17.3 |
| VW | e-up! | 18.7 | 17.7 |
| Jaguar | I-PACE | 90.0 | 27.6 |
| Kia | Soul EV | 27.0 | 19.1 |
| Smart | fortwo | 17.6 | 18.3 |
| Smart | forfour | 17.6 | 18.3 |
| Tesla | Model S | 90.0 | 24.0 |
| Tesla | Model 3 | 75.0 | 20.9 |
References
- Vopava, J.; Kienberger, T. Impact of increasing electric mobility on a distribution grid at the medium voltage level. In Proceedings of the 2nd E-Mobility Power System Integration, Stockholm, Sweden, 15 October 2018. [Google Scholar]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The Impact of Charging Plug-In Hybrid Electric Vehicles on a Residential Distribution Grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef]
- Deb, S.; Tammi, K.; Kalita, K.; Mahanta, P. Impact of Electric Vehicle Charging Station Load on Distribution Network. Energies 2018, 11, 178. [Google Scholar] [CrossRef]
- Leemput, N.; Geth, F.; van Roy, J.; Olivella-Rosell, P.; Driesen, J.; Sumper, A. MV and LV Residential Grid Impact of Combined Slow and Fast Charging of Electric Vehicles. Energies 2015, 8, 1760–1783. [Google Scholar] [CrossRef]
- Osório, G.; Shafie-khah, M.; Coimbra, P.; Lotfi, M.; Catalão, J. Distribution System Operation with Electric Vehicle Charging Schedules and Renewable Energy Resources. Energies 2018, 11, 3117. [Google Scholar] [CrossRef]
- Munkhammar, J.; Widén, J.; Rydén, J. On a probability distribution model combining household power consumption, electric vehicle home-charging and photovoltaic power production. Appl. Energy 2015, 142, 135–143. [Google Scholar] [CrossRef]
- Chaouachi, A.; Bompard, E.; Fulli, G.; Masera, M.; De Gennaro, M.; Paffumi, E. Assessment framework for EV and PV synergies in emerging distribution systems. Renew. Sustain. Energy Rev. 2016, 55, 719–728. [Google Scholar] [CrossRef]
- Su, S.; Hu, Y.; Yang, T.; Wang, S.; Liu, Z.; Wei, X.; Xia, M.; Ota, Y.; Yamashita, K. Research on an Electric Vehicle Owner-Friendly Charging Strategy Using Photovoltaic Generation at Office Sites in Major Chinese Cities. Energies 2018, 11, 421. [Google Scholar] [CrossRef]
- Chandra Mouli, G.R.; Bauer, P.; Zeman, M. System design for a solar powered electric vehicle charging station for workplaces. Appl. Energy 2016, 168, 434–443. [Google Scholar] [CrossRef]
- Gnann, T.; Klingler, A.L.; Kühnbach, M. The load shift potential of plug-in electric vehicles with different amounts of charging infrastructure. J. Power Sources 2018, 390, 20–29. [Google Scholar] [CrossRef]
- Vopava, J.; Koczwara, C.; Traupmann, A.; Kienberger, T. Investigating the Impact of E-Mobility on the Electrical Power Grid Using a Simplified Grid Modelling Approach. Energies 2020, 13, 39. [Google Scholar] [CrossRef]
- Babrowski, S.; Heinrichs, H.; Jochem, P.; Fichtner, W. Load shift potential of electric vehicles in Europe. J. Power Sources 2014, 255, 283–293. [Google Scholar] [CrossRef]
- Su, W.; Wang, J.; Zhang, K.; Chow, M.Y. Framework for investigating the impact of PHEV charging on power distribution system and transportation network. In Proceedings of the IECON 2012, 38th annual conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 4735–4740, ISBN 978-1-4673-2421-2. [Google Scholar]
- ZAMG Zentralanstalt für Meteorologie und Geodynamik. Einstrahlungsmessdaten und Temperaturmesswerte des Jahres 2014 für Kapfenberg; ZAMG Zentralanstalt für Meteorologie und Geodynamik: Wien, Austria, 2014. [Google Scholar]
- Amt der Steiermärkischen Landesregierung. Solardachkataster Steiermark. Available online: https://www.landesentwicklung.steiermark.at/cms/beitrag/11864478/142970647/ (accessed on 3 July 2020).
- Zhang, T.Z.; Chen, T.D. Smart charging management for shared autonomous electric vehicle fleets: A Puget Sound case study. Transp. Res. Part D 2020, 78, 102184. [Google Scholar] [CrossRef]
- Steinmüller, H.; Tichler, R.; Kienberger, T.; Gawlik, W.; Lehner, M.; Muggenhumer, G.; Kriechbaum, L.; Böckl, B.; Winter, A.; Biegger, P.; et al. Smart Exergy Leoben—Final Report. Exergetische Optimierung der Energieflüsse für eine smarte Industriestadt Leoben; Klima- und Energiefonds: Wien, Austria, 2017. [Google Scholar]
- Kienberger, T.; Hammer, A.; Vopava, J.; Thormann, B.; Kriechbaum, L.; Sejkora, C.; Hermann, R.; Watschka, K.; Bergmann, U.; Frewein, M.; et al. Move2Grid—Final Report. Umsetzung regionaler Elektromobilitätsversorgung durch hybride Kopplung; Bundesministerium für Verkehr, Innovation und Technologie: Wien, Austria, 2019. [Google Scholar]
- NEPLAN AG; NEPLAN: Küsnacht, Switzerland, 2015.
- BDEW—Budesverband der Energie- und Wasserwirtschaft e.V. Standardlastprofile Strom. Available online: https://www.bdew.de/energie/standardlastprofile-strom/ (accessed on 3 April 2019).
- E-CONTROL. Sonstige Marktregeln. Kapitel 6: Zählwerte, Datenformate und Standardisierte Lastprofile. Available online: https://www.e-control.at/recht/marktregeln/sonstige-marktregeln-strom#p_p_id_56_INSTANCE_10318A20066_ (accessed on 3 April 2019).
- QGIS Development Team. QGIS Geographisches Informationssystem. Available online: https://qgis.org/en/site/ (accessed on 3 July 2020).
- Bosserhoff, D. Integration von Verkehrsplanung und Räumlicher Planung. Teil2: Abschätzung der Verkehrserzeugung Durch Vorhaben der Bauleitungsplanung; Hessisches Landesamt für Straßen- und Verkehrswesen: Wiesbaden, Germany, 2000. [Google Scholar]
- Fraunhofer-Institut für System- und Innovationsforschung ISI. Codebook REM 2030 Driving Profiles Database; Fraunhofer-Institut für System- und Innovationsforschung ISI: Karlsruhe, Germany, 2015. [Google Scholar]
- Infas—Institut für angewandte Sozialwissenschaft GmbH; TRICONSULT—Wirtschaftsanalytische Forschung Gesellschaft m.b.H; HERRY Consult GmbH; Sammer und Partner Zivilingenieur GmbH, ZIS+P Verkehrsplanung; Institut für Verkehrswesen der Universität für Bodenkultur. Österreich Unterwegs 2013/2014. Ergebnisbericht; Bundesministerium für Verkehr, Innovation und Technologie: Wien, Austria, 2016. [Google Scholar]
- Infas-Institut für angewandte Sozialwissenschaften GmBH; Deutsches Zentrum für Luft und Raumfahrt e.V.; Institut für Verkehrsforschung; IVT Research GmbH. Mobilität in Deutschland—MiD. Ergebnisbericht; Bundesministerium für Verkehr und digitale Infrastruktur: Bonn, Germany, 2018. [Google Scholar]
- Kraftfahrt-Bundesamt. Neuzulassungen—Deutschland. Available online: https://www.kba.de/DE/Statistik/Fahrzeuge/Neuzulassungen/neuzulassungen_node.html (accessed on 15 July 2019).
- Allgemeiner Deutscher Automobil-Club e.V. ADAC Ecotest. Available online: https://www.adac.de/infotestrat/tests/eco-test (accessed on 1 July 2019).
- Tober, W. Praxisbericht Elektromobilität und Verbrennungsmotor. Analyse elektrifizierter Pkw-Antriebskonzepte; Springer: Wiesbaden, Germany, 2016; ISBN 9783658136017. [Google Scholar]
- World Meteorological Organization. Mean Daily Temperature Provided for Each Month by “World Weather Information Service”. Available online: https://www.wwis.dwd.de/de/home.html (accessed on 3 July 2020).
- Kapfenberger-Pock, A. Grazer Solardachkataster. Solarthermie bzw. Photovoltaik; Stadtvermessungsamt: Graz, Austria, 2013. [Google Scholar]
- Perez, R.; Seals, R.; Ineichen, P.; Stewart, R.; Menicucci, D. A new simplified version of the perez diffuse irradiance model for tilted surfaces. Sol. Energy 1987, 39, 221–231. [Google Scholar] [CrossRef]
- Perez, R.; Stewart, R.; Seals, R.; Guertin, T. The Development and Verification of the Perez Diffuse Radiation Model; Sandia National Labs: Livermore, CA, USA, 1988. [Google Scholar]
- Perez, R.; Ineichen, P.; Seals, R.; Michalsky, J.; Stewart, R. Modeling daylight availability and irradiance components from direct and global irradiance. Sol. Energy 1990, 44, 271–289. [Google Scholar] [CrossRef]
- Duffie, J.A.; Beckman, W.A. Solar Engineering of Thermal Processes, 3rd ed.; Wiley: Hoboken, NJ, USA, 2006; ISBN 9780471698678. [Google Scholar]
- Pretschuh, P. Solares Energiepotential Kleiner und Mittlerer Städte; Montanuniversität Leoben: Leoben, Austria, 2016. [Google Scholar]
























| Charging Strategy | Type of Charging | Start of the Charging Process (CP) | Further Information |
|---|---|---|---|
| 1 | Uncontrolled | Time of arrival | Basis for charging strategy 2 |
| 2 | Intelligent controlled | Depending on the time span in which the CP can be shifted | Two approaches: Shifting CPs into PV Peak or sequencing of CPs |
| Penetration (%) | Duration of Overload (h) Line 1 | Penetration (%) | Duration of Overload (h) Line 5 | ||||
|---|---|---|---|---|---|---|---|
| PV | EV | 3.7 kW | 11 kW | PV | EV | 3.7 kW | 11 kW |
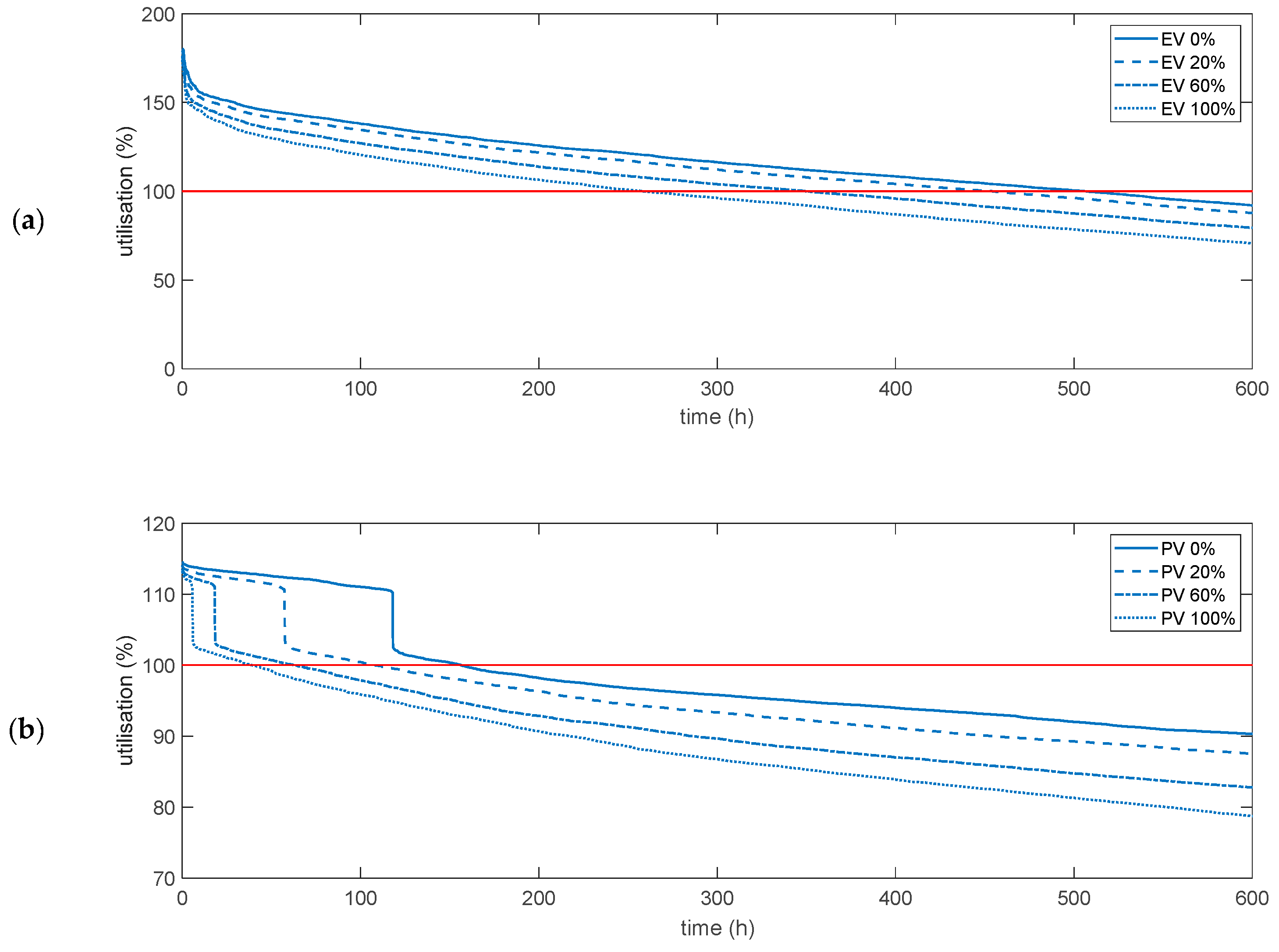
| 60 | 0 | 506.50 | 506.50 | 0 | 60 | 154.50 | 155.75 |
| 60 | 20 | 454.00 | 450.50 | 20 | 60 | 107.75 | 132.25 |
| 60 | 40 | 396.75 | 392.00 | 40 | 60 | 84.25 | 106.00 |
| 60 | 60 | 349.50 | 346.25 | 60 | 60 | 62.75 | 92.50 |
| 60 | 80 | 300.75 | 294.75 | 80 | 60 | 47.50 | 79.00 |
| 60 | 100 | 258.5 | 206.75 | 100 | 60 | 39.00 | 67.00 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vopava, J.; Bergmann, U.; Kienberger, T. Synergies between e-Mobility and Photovoltaic Potentials—A Case Study on an Urban Medium Voltage Grid. Energies 2020, 13, 3795. https://doi.org/10.3390/en13153795
Vopava J, Bergmann U, Kienberger T. Synergies between e-Mobility and Photovoltaic Potentials—A Case Study on an Urban Medium Voltage Grid. Energies. 2020; 13(15):3795. https://doi.org/10.3390/en13153795
Chicago/Turabian StyleVopava, Julia, Ulrich Bergmann, and Thomas Kienberger. 2020. "Synergies between e-Mobility and Photovoltaic Potentials—A Case Study on an Urban Medium Voltage Grid" Energies 13, no. 15: 3795. https://doi.org/10.3390/en13153795
APA StyleVopava, J., Bergmann, U., & Kienberger, T. (2020). Synergies between e-Mobility and Photovoltaic Potentials—A Case Study on an Urban Medium Voltage Grid. Energies, 13(15), 3795. https://doi.org/10.3390/en13153795