Real-Time Building Smart Charging System Based on PV Forecast and Li-Ion Battery Degradation



Abstract
:1. Introduction
1.1. Literature Study
1.2. Contribution
- a Lithium-ion degradation model used to accurately assess and optimize the operational costs of EV and BES. It will be shown that the degradation costs are equal to 68% of the total grid electricity costs and are therefore nonnegligible;
- a two-stage model predictive controller consisting of an optimal charging algorithm and real-time controller implemented in a moving horizon control scheme to compensate forecasting and estimation errors, such as PV power or SoC estimation, at a one-minute resolution. It was found that using a moving horizon window and real-time control scheme furthers reduces the costs by 9.7% compared to the reduction in cost of only optimal scheduling;
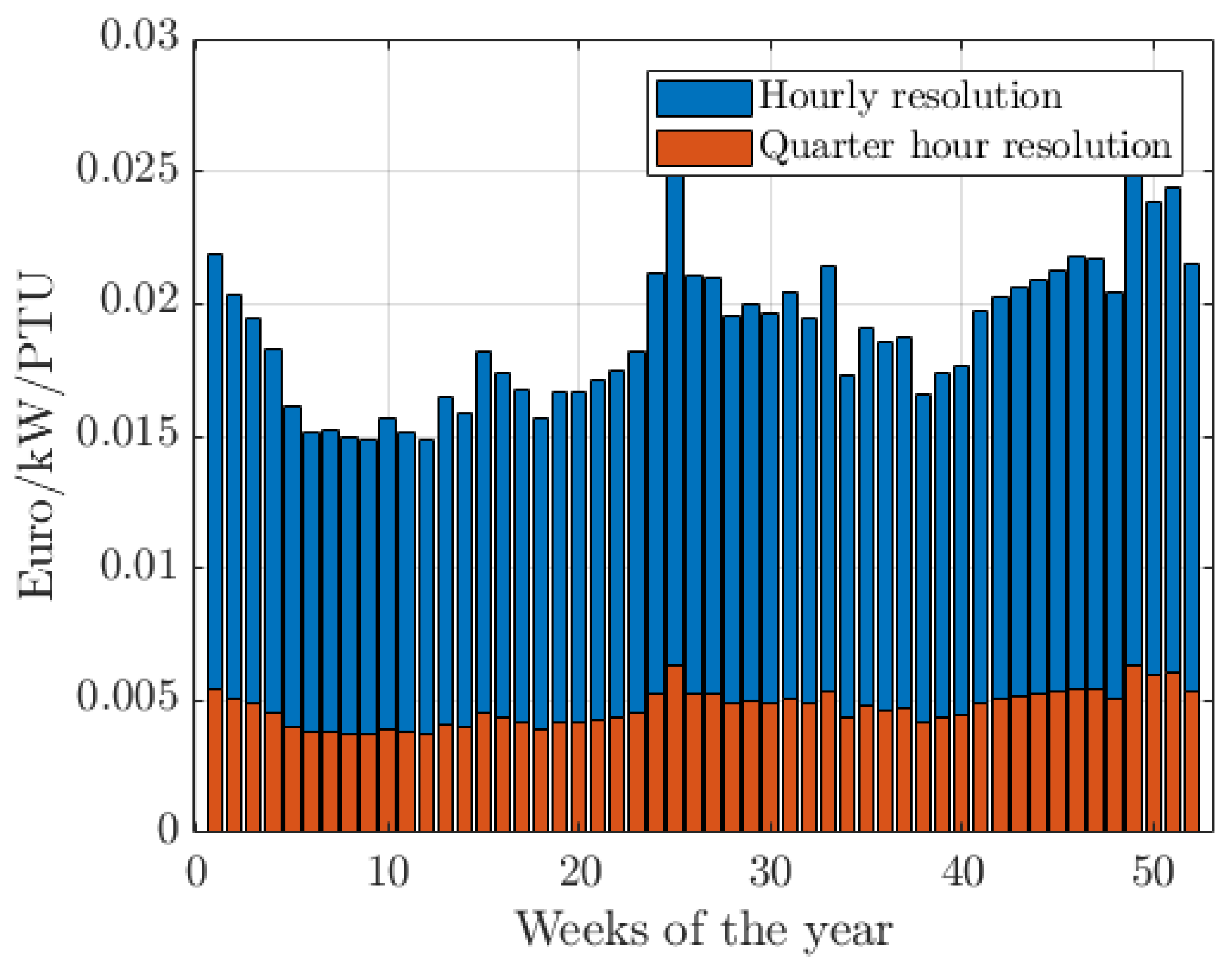
- a forecast of PV power and load demand in 15-min resolution up to 48 h ahead. Even using advanced irradiance forecasting, root mean square errors can be up to 45% [30], showing the necessity of a model predictive controller; and
- Smart grid implementation in order for the system to be integrated into a future smart grid, allowing for power curtailment and optimization of available reserved capacity for primary frequency regulation, further reducing the cost by 7.8%.
1.3. Paper Organization
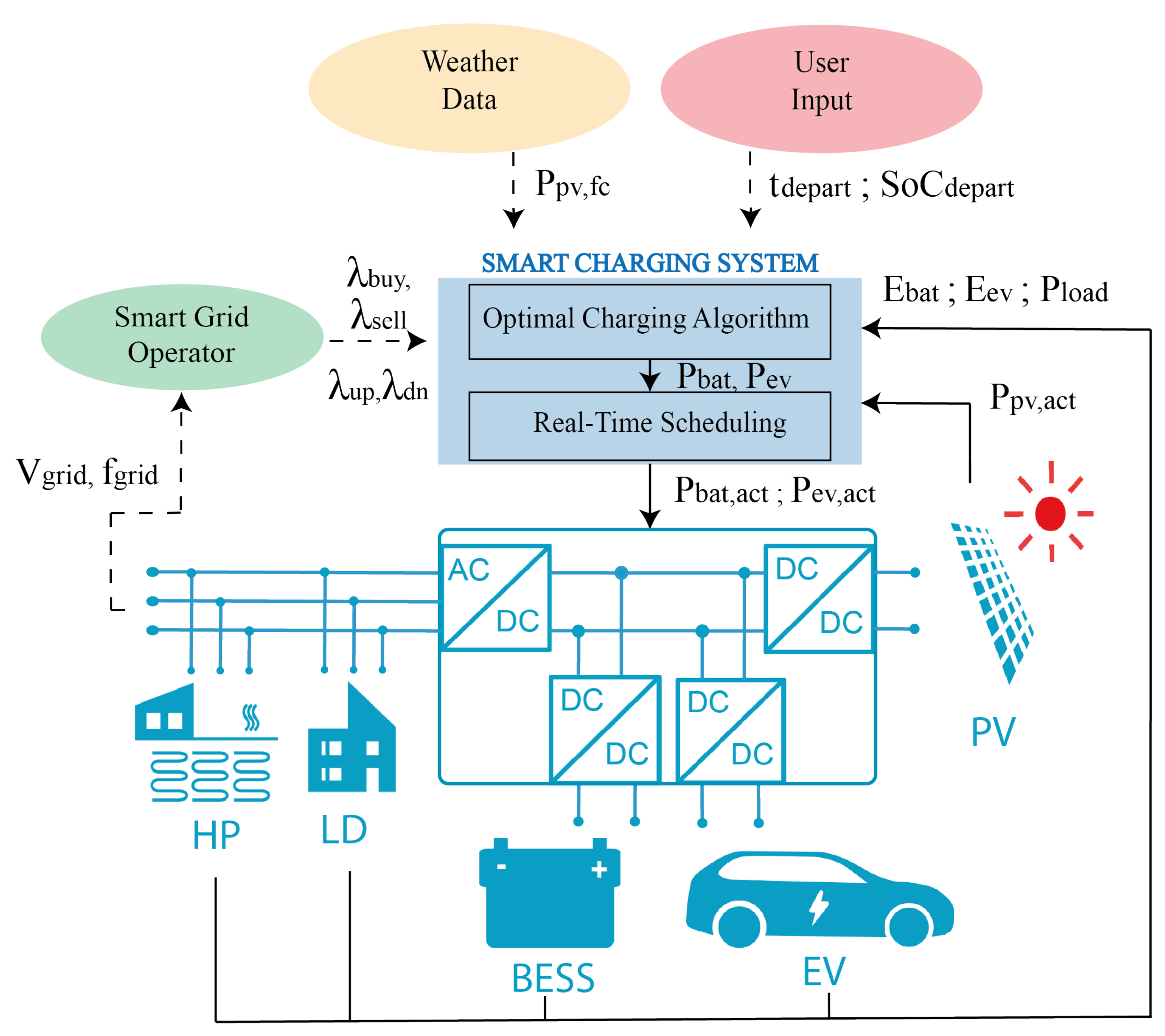
2. System Description and Smart Grid Implementation
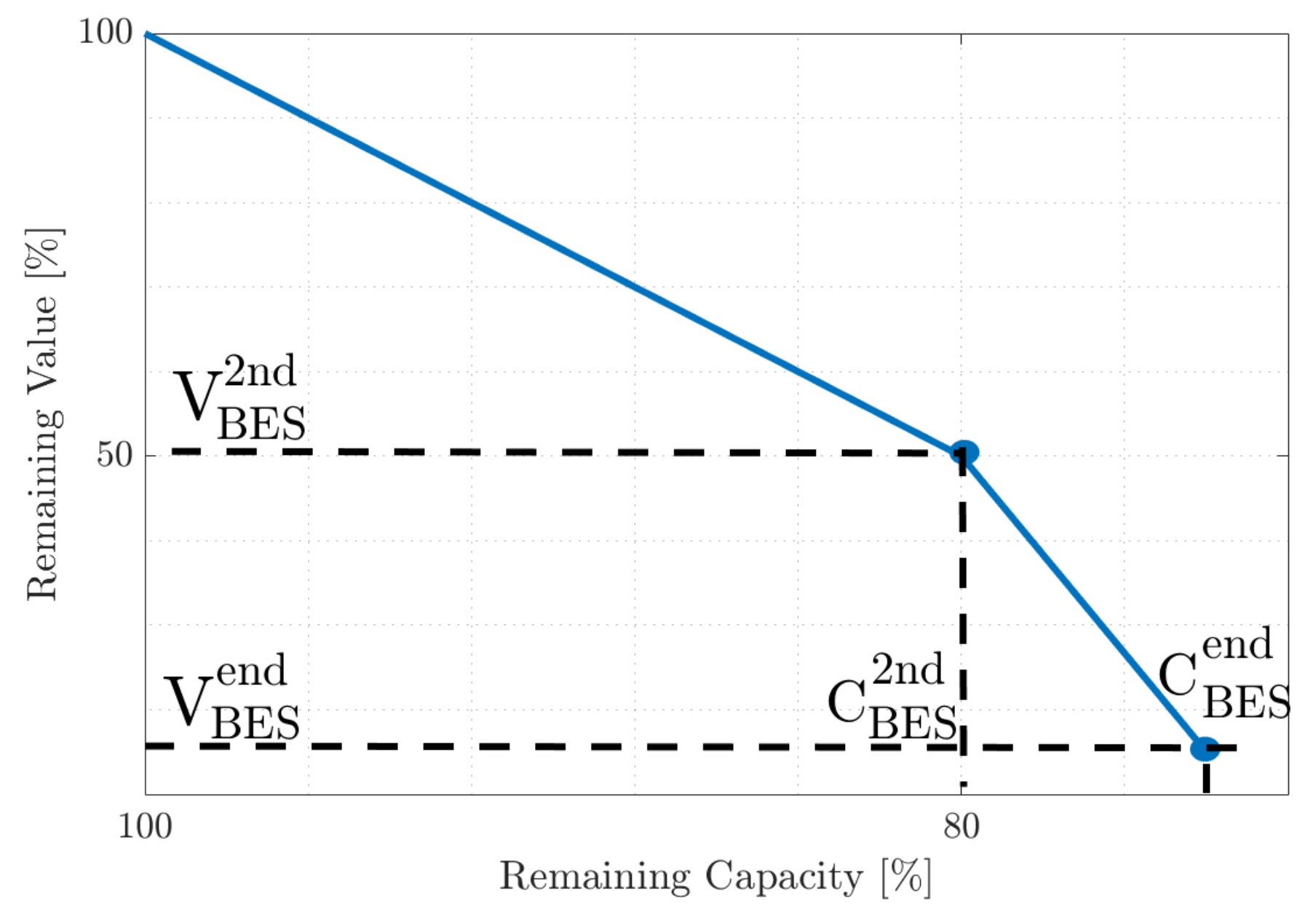
3. Second-Life Batteries
4. Materials and Methods
4.1. Forecasting
4.2. Optimal Charging Algorithm
4.2.1. Objective Function
4.2.2. Constraints
4.2.2.1. Lithium-Ion Degradation Model
4.2.2.2. Battery Energy Storage Constraints
4.2.2.3. Electric Vehicle Constraints
4.2.2.4. Power Balance Constraints
4.2.2.5. Grid Constraints
4.2.2.6. Regulation Market Constraints
4.2.2.7. Inverter Constraints
4.2.2.8. Photovoltaic Constraints
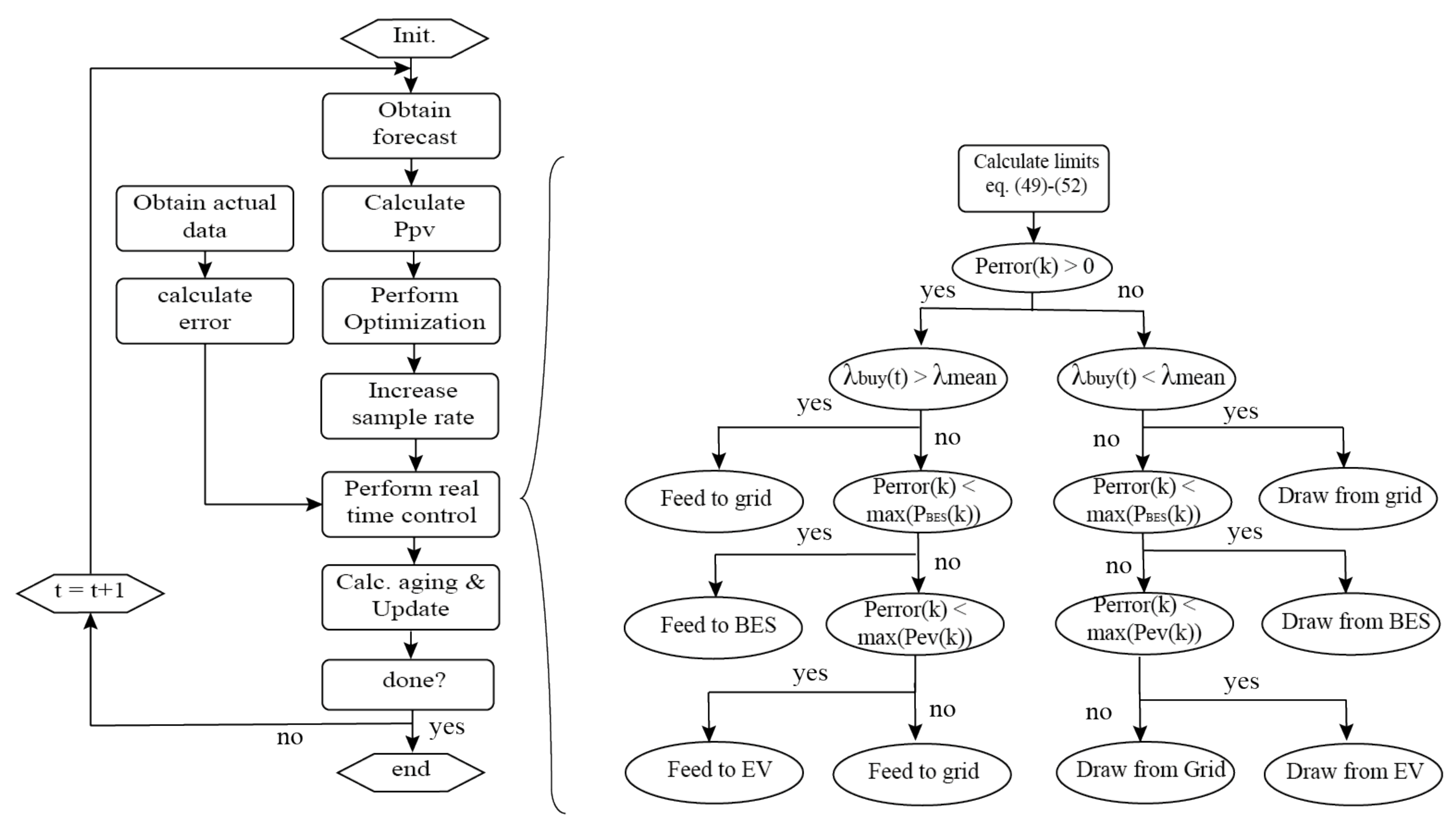
4.3. Moving Horizon Window and Real-Time Control
5. Use Case and Price Mechanism
6. Results and Discussion
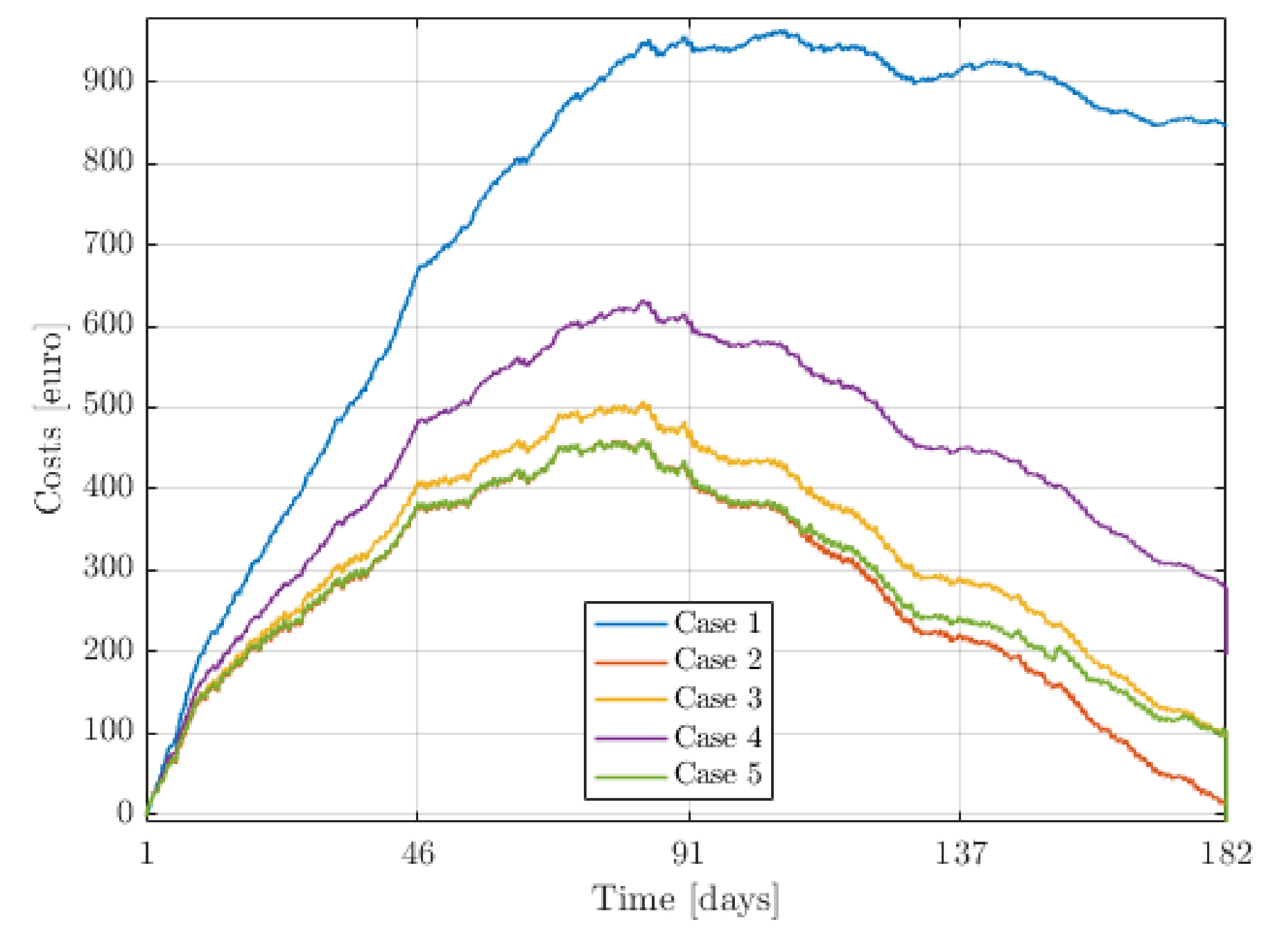
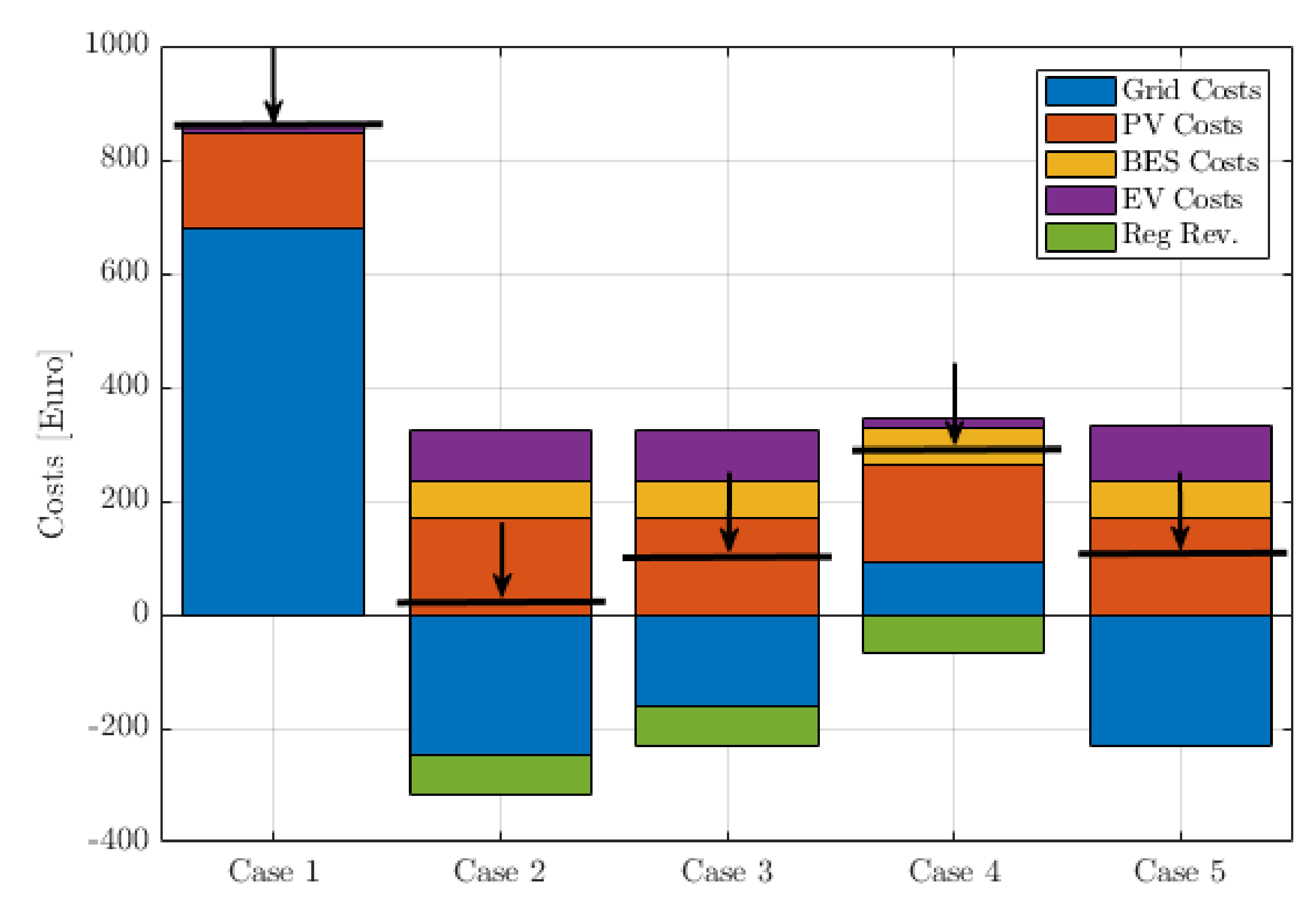
6.1. Comparison
- case 1: Uncontrolled case (only EV, PV, and load)
- case 2: Proposed optimal and real-time control scheme
- case 3: Proposed optimal control and error compensation using grid power
- case 4: Proposed optimal and real-time control scheme without V2G.
- case 5: Proposed optimal and real-time control scheme without up/downregulation.
Demand-Side Management: Power Curtailment
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| t | optimization time index (-) |
| optimization time step (-) | |
| k | real-time control time index (-) |
| Total cost of energy (Euro) | |
| BES costs (Euro) | |
| Electric vehicle costs (Euro) | |
| PV costs (Euro) | |
| Grid energy costs (Euro) | |
| up/downregulation revenue (Euro) | |
| New BES price per kWh (500 Euro) | |
| New EV price per kWh (500 Euro) | |
| 2nd life BES price per kWH (250 Euro) | |
| 2nd life EV price per kWH (250 Euro) | |
| PV energy price (0.03 Euro) | |
| Grid energy buying price (Euro) | |
| Grid energy buying price (Euro) | |
| up regulation price (Euro) | |
| down regulation price (Euro) | |
| BES capacity at time t (kWh) | |
| Initial maximum BES capacity (10 kWh) | |
| Max BES capacity at time t (kWh) | |
| Initial BES capacity (5 kWh) | |
| Total degraded BES capacity (kWh) | |
| Total degraded EV capacity (kWh) | |
| EV capacity at time t (kWh) | |
| Initial maximum EV capacity (80 kWh) | |
| Max EV capacity at time t (kWh) | |
| Initial EV capacity (35 kWh) | |
| Final EV capacity (35 kWh) | |
| EV departure charge (50 kWh) | |
| inverter power at time t (kW) | |
| Max inverter power (10 kW) | |
| negative (draw) inverter power (kW) | |
| positive (feed-in) inverter power (kW) | |
| BES power at time t (kW) | |
| Max BES power (10 kW) | |
| discharging BES power (kW) | |
| charging BES power (kW) | |
| EV power at time t (kW) | |
| Max EV power (kW) | |
| discharging EV power (kW) | |
| charging EV power (kW) | |
| produced PV power at time t (kW) | |
| forecasted PV power at time t (kW) | |
| forecasted PV power at time t (kW) | |
| total load power at time t (kW) | |
| grid power at time t (kW) | |
| Maximum grid power (kW) | |
| feed-in grid power (kW) | |
| buying grid power (kW) | |
| available up-regulation capacity (kW) | |
| available down-regulation capacity (kW) | |
| Average BES cell voltage (3.7 V) | |
| open circuit voltage BES (V) | |
| open circuit voltage BES (V) | |
| BES cell current (A) | |
| BES cell current (A) | |
| BES Energy Storage State of Charge (-) | |
| Electric vehicle State of Charge (-) | |
| MPPT efficiency (98%) | |
| Inverter efficiency (96%) | |
| EV/BES charging efficiency (97.5%) | |
| EV/BES discharging efficiency (97.5%) | |
| cable efficiency (99%) | |
| Electric vehicle departure time (8:00 h) | |
| Bank account interest rate (1%/year) | |
| a1 (3.679) | |
| a2 (−0.2528) | |
| a3 (0.9386) | |
| b1 (−0.1101) | |
| b2 (−6.829) | |
| c (0.00054) | |
| c (0.35) | |
| c (14,876) | |
| c (2.64 ) | |
| Amount of EV battery cell groups in parallel (145) | |
| Amount of EV battery cell in series (100) | |
| Amount of cells in series in BES (100) | |
| Amount of cells in parallel in BES [18] |
References
- Global Transportation Energy Consumption: Examination of Scenarios to 2040 Using ITEDD. Available online: https://www.eia.gov/analysis/studies/transportation/scenarios/pdf/globaltransportation.pdf (accessed on 7 April 2020).
- Kempton, W.; Tomić, J. Vehicle-to-grid power implementation: From stabilizing the grid to supporting large-scale renewable energy. J. Power Sources 2005, 144, 280–294. [Google Scholar] [CrossRef]
- Birnie, D.P. Solar-to-vehicle (S2V) systems for powering commuters of the future. J. Power Sources 2009, 186, 539–542. [Google Scholar] [CrossRef]
- haikh, P.H.; Nor, N.B.M.; Nallagownden, P.; Elamvazuthi, I.; Ibrahim, T. A review on optimized control systems for building energy and comfort management of smart sustainable buildings. Renew. Sustain. Energy Rev. 2014, 34, 409–429. [Google Scholar] [CrossRef]
- Cao, X.; Dai, X.; Liu, J. Building Energy-Consumption Status Worldwide and the State-of-the-Art Technologies for Zero-Energy Buildings during the Past Decade. Energy Build. 2016, 128, 198–213. [Google Scholar] [CrossRef]
- Teleke, S.; Baran, M.E.; Bhattacharya, S.; Huang, A.Q. Rule-Based Control of Battery Energy Storage for Dispatching Intermittent Renewable Sources. IEEE Trans. Sustain. Energy 2010, 1, 117–124. [Google Scholar] [CrossRef]
- Doukas, H.; Patlitzianas, K.D.; Iatropoulos, K.; Psarras, J. Intelligent building energy management system using rule sets. Build. Environ. 2007, 42, 3562–3569. [Google Scholar] [CrossRef]
- Wi, Y.-M.; Lee, J.-U.; Joo, S.-K. Electric vehicle charging method for smart homes/buildings with a photovoltaic system. IEEE Trans. Consum. Electron. 2013, 59, 323–328. [Google Scholar] [CrossRef]
- Brahman, F.; Honarmand, M.; Jadid, S. Optimal electrical and thermal energy management of a residential energy hub, integrating demand response and energy storage system. Energy Build. 2015, 90, 65–75. [Google Scholar] [CrossRef]
- Bozchalui, M.C.; Hashmi, S.A.; Hassen, H.; Canizares, C.A.; Bhattacharya, K. Optimal Operation of Residential Energy Hubs in Smart Grids. IEEE Trans. Smart Grid 2012, 3, 1755–1766. [Google Scholar] [CrossRef]
- Igualada, L.; Corchero, C.; Cruz-Zambrano, M.; Heredia, F.-J. Optimal Energy Management for a Residential Microgrid Including a Vehicle-to-Grid System. IEEE Trans. Smart Grid 2014, 5, 2163–2172. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Yue, H.; Zhang, J.; Booth, C. Minimization of Residential Energy Cost Considering Energy Storage System and EV with Driving Usage Probabilities. IEEE Trans. Sustain. Energy 2019, 10, 1752–1763. [Google Scholar] [CrossRef] [Green Version]
- Pedrasa, M.A.A.; Spooner, T.D.; MacGill, I.F. Coordinated Scheduling of Residential Distributed Energy Resources to Optimize Smart Home Energy Services. IEEE Trans. Smart Grid 2010, 1, 134–143. [Google Scholar] [CrossRef]
- Tushar, W.; Yuen, C.; Huang, S.; Smith, D.B.; Poor, H.V. Cost Minimization of Charging Stations with Photovoltaics: An Approach with EV Classification. IEEE Trans. Intell. Transp. Syst. 2016, 17, 156–169. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Zhang, Y.; Li, T.; Jiang, L.; Li, K.; Yin, H.; Ma, C. A Hierarchical Distributed Energy Management for Multiple PV-Based EV Charging Stations. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; IEEE: Washington, DC, USA, 2018; pp. 1603–1608. [Google Scholar]
- Guo, Y.; Xiong, J.; Xu, S.; Su, W. Two-Stage Economic Operation of Microgrid-Like Electric Vehicle Parking Deck. IEEE Trans. Smart Grid 2016, 7, 1703–1712. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, Q.; Shahidehpour, M.; Li, C.; Huang, S.; Wei, W. Transactive Real-Time Electric Vehicle Charging Management for Commercial Buildings with PV On-Site Generation. IEEE Trans. Smart Grid 2019, 10, 4939–4950. [Google Scholar] [CrossRef] [Green Version]
- Yan, Q.; Zhang, B.; Kezunovic, M. Optimized Operational Cost Reduction for an EV Charging Station Integrated with Battery Energy Storage and PV Generation. IEEE Trans. Smart Grid 2019, 10, 2096–2106. [Google Scholar] [CrossRef]
- Chaudhari, K.; Ukil, A.; Kumar, K.N.; Manandhar, U.; Kollimalla, S.K. Hybrid Optimization for Economic Deployment of ESS in PV-Integrated EV Charging Stations. IEEE Trans. Ind. Inf. 2018, 14, 106–116. [Google Scholar] [CrossRef]
- Tran, V.T.; Islam, M.d.R.; Muttaqi, K.M.; Sutanto, D. An Efficient Energy Management Approach for a Solar-Powered EV Battery Charging Facility to Support Distribution Grids. IEEE Trans. Ind. Appl. 2019, 55, 6517–6526. [Google Scholar] [CrossRef]
- Weckx, S.; Driesen, J. Load Balancing with EV Chargers and PV Inverters in Unbalanced Distribution Grids. IEEE Trans. Sustain. Energy 2015, 6, 635–643. [Google Scholar] [CrossRef] [Green Version]
- O’Connell, A.; Flynn, D.; Keane, A. Rolling Multi-Period Optimization to Control Electric Vehicle Charging in Distribution Networks. IEEE Trans. Power Syst. 2014, 29, 340–348. [Google Scholar] [CrossRef]
- Singh, M.; Kar, I.; Kumar, P. Influence of EV on grid power quality and optimizing the charging schedule to mitigate voltage imbalance and reduce power loss. In Proceedings of the 14th International Power Electronics and Motion Control Conference EPE-PEMC 2010, Ohrid, Macedonia, 6–8 September 2010; pp. T2-196–T2-203. [Google Scholar]
- Chandra Mouli, G.R. Charging Electric Vehicles from Solar Energy: Power Converter, Charging Algorithm and System Design. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2018. [Google Scholar]
- Hu, J.; You, S.; Lind, M.; Ostergaard, J. Coordinated Charging of Electric Vehicles for Congestion Prevention in the Distribution Grid. IEEE Trans. Smart Grid 2014, 5, 703–711. [Google Scholar] [CrossRef] [Green Version]
- Mets, K.; Verschueren, T.; De Turck, F.; Develder, C. Exploiting V2G to optimize residential energy consumption with electrical vehicle (dis)charging. In Proceedings of the IEEE First International Workshop on Smart Grid Modeling and Simulation (SGMS 2011), Brussels, Belgium, 17 October 2011. [Google Scholar]
- Chen, Q.; Wang, F.; Hodge, B.-M.; Zhang, J.; Li, Z.; Shafie-Khah, M.; Catalao, J.P.S. Dynamic Price Vector Formation Model-Based Automatic Demand Response Strategy for PV-Assisted EV Charging Stations. IEEE Trans. Smart Grid 2017, 8, 2903–2915. [Google Scholar] [CrossRef]
- Sortomme, E.; El-Sharkawi, M.A. Optimal Scheduling of Vehicle-to-Grid Energy and Ancillary Services. IEEE Trans. Smart Grid 2012, 3, 351–359. [Google Scholar] [CrossRef]
- Badawy, M.O.; Sozer, Y. Power Flow Management of a Grid Tied PV-Battery System for Electric Vehicles Charging. IEEE Trans. Ind. Applicat. 2017, 53, 1347–1357. [Google Scholar] [CrossRef]
- Wang, P.; van Westrhenen, R.; Meirink, J.F.; van der Veen, S.; Knap, W. Surface solar radiation forecasts by advecting cloud physical properties derived from Meteosat Second Generation observations. Solar Energy 2019, 177, 47–58. [Google Scholar] [CrossRef]
- Cecati, C.; Khalid, H.A.; Tinari, M.; Adinolfi, G.; Graditi, G. DC nanogrid for renewable sources with modular DC/DC LLC converter building block. IET Power Electron. 2017, 10, 536–544. [Google Scholar] [CrossRef]
- Chandra Mouli, G.R.; Bauer, P.; Zeman, M. System design for a solar powered electric vehicle charging station for workplaces. Appl. Energy 2016, 168, 434–443. [Google Scholar] [CrossRef] [Green Version]
- Tesla Model S. Available online: http://www.roperld.com/science/teslamodels.htm (accessed on 15 May 2020).
- LG Chem RESU 10H—400V Lithium-Ion Storage Battery. Available online: https://www.europe-solarstore.com/lg-chem-resu-10h-400v-lithium-ion-storage-battery.html (accessed on 15 May 2020).
- Cready, E.; Lippert, J.; Pihl, J.; Weinstock, I.; Symons, P. Technical and Economic Feasibility of Applying Used EV Batteries in Stationary Applications; SAND2002-4084; Sandia National Labs.: Albuquerque, NM, USA, 2003; p. 809607. [Google Scholar]
- Martinez-Laserna, E.; Sarasketa-Zabala, E.; Villarreal Sarria, I.; Stroe, D.-I.; Swierczynski, M.; Warnecke, A.; Timmermans, J.-M.; Goutam, S.; Omar, N.; Rodriguez, P. Technical Viability of Battery Second-life: A Study From the Ageing Perspective. IEEE Trans. Ind. Applicat. 2018, 54, 2703–2713. [Google Scholar] [CrossRef]
- Akhter, M.N.; Mekhilef, S.; Mokhlis, H.; Mohamed Shah, N. Review on forecasting of photovoltaic power generation based on machine learning and metaheuristic techniques. IET Renew. Power Gener. 2019, 13, 1009–1023. [Google Scholar] [CrossRef] [Green Version]
- van der Meer, D.; Ram Chandra Mouli, G.; Morales-Espana, G.; Ramirez Elizondo, L.; Bauer, P. Erratum to Energy Management System with PV Power Forecast to Optimally Charge EVs at the Workplace. IEEE Trans. Ind. 2018, 14, 311–320, 3298. [Google Scholar] [CrossRef] [Green Version]
- Forecast of Solar Radiation in The Netherlands. Available online: https://www.knmi.nl/research/observations-data-technology/projects (accessed on 7 April 2020).
- Voulis, N. Harnessing Heterogeneity: Understanding Urban Demand to Support the Energy Transition. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2019. [Google Scholar]
- Laslau, C.; Xie, L.; Robinson, C. The Next-Generation Battery Roadmap: Quantifying How Solid-State, Lithium-Sulfur, and Other Batteries Will Emerge After 2020. Lux Research Energy Storage Intelligence Research. 2015. Available online: https://members.luxresearchinc.com/research/report/17977 (accessed on 7 April 2020).
- BARON. Available online: https://minlp.com/baron (accessed on 7 April 2020).
- Battery Value Versus Remaining Energy. Available online: https://www.nrel.gov/docs/fy16osti/66140.pdf (accessed on 7 April 2020).
- Wang, J.; Purewal, J.; Liu, P.; Hicks-Garner, J.; Soukazian, S.; Sherman, E.; Sorenson, A.; Vu, L.; Tataria, H.; Verbrugge, M.W. Degradation of lithium ion batteries employing graphite negatives and nickel–cobalt–manganese oxide + spinel manganese oxide positives: Part 1, aging mechanisms and life estimation. J. Power Sources 2014, 269, 937–948. [Google Scholar] [CrossRef]
- De Systeemkosten van Warmte Voor Woningen. Available online: https://repository.tudelft.nl/view/tno/uuid:9d49b1d3-107b-4f49-a36c-b606786bc207 (accessed on 7 April 2020).
- Baccouche, I.; Jemmali, S.; Manai, B.; Omar, N.; Amara, N. Improved OCV Model of a Li-Ion NMC Battery for Online SOC Estimation Using the Extended Kalman Filter. Energies 2017, 10, 764. [Google Scholar] [CrossRef] [Green Version]
- Analyses. Available online: https://platform.elaad.io/analyses.html (accessed on 7 April 2020).
- Tesla Model 3 Standard Range. Available online: https://ev-database.org/car/1060/Tesla-Model-3-Standard-Range (accessed on 7 April 2020).
- Chandra Mouli, G.R.; Schijffelen, J.H.; Bauer, P.; Zeman, M. Design and Comparison of a 10-kW Interleaved Boost Converter for PV Application Using Si and SiC Devices. IEEE J. Emerg. Sel. Topics Power Electron. 2017, 5, 610–623. [Google Scholar] [CrossRef] [Green Version]
- Market Data. Available online: https://www.epexspot.com/en/market-data (accessed on 7 April 2020).
- Regelleistung. Net-Datencenter. Available online: https://www.regelleistung.net/apps/datacenter/tenders/ (accessed on 7 April 2020).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value |
|---|---|---|
| installed PV capacity power | 10 kWp | |
| Maximum EV (dis)charging power | 10 kW | |
| Maximum battery (dis)charging power | 10 kW | |
| Initial full EV capacity | 80 kWh | |
| Initial full battery capacity | 10 kWh | |
| EV voltage | 325–430 V | |
| BES voltage | 325–430 V |
| Symbol | Quantity | Value |
|---|---|---|
| Number of battery cells in parallel | 14 | |
| Number of battery cells in series | 100 | |
| curve fit parameter | 3.679 | |
| curve fit parameter | −0.1101 | |
| curve fit parameter | −0.2528 | |
| curve fit parameter | −6.829 | |
| curve fit parameter | 0.9386 | |
| ageing curve fit parameter | 0.00054 | |
| ageing curve fit parameter | 0.35 | |
| ageing curve fit parameter | 14,876 | |
| averaged calendar ageing per | 2.64 × 10 |
| Use Case | [€] | [€] | [€] | [€] | [€] | [€] |
|---|---|---|---|---|---|---|
| 1 | 679.5 | 169.14 | 0 | 10.38 | 0 | 859.01 |
| 2 | −247.27 | 169.14 | 64.61 | 91.88 | −66.74 | 11.76 |
| 3 | −163.09 | 169.14 | 64.34 | 91.7 | −66.74 | 95.24 |
| 4 | 93.4 | 169.14 | 65.68 | 16.94 | −66.83 | 278.3 |
| 5 | −230.74 | 169.14 | 65.54 | 98.367 | 0 | 102.3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vermeer, W.; Chandra Mouli, G.R.; Bauer, P. Real-Time Building Smart Charging System Based on PV Forecast and Li-Ion Battery Degradation. Energies 2020, 13, 3415. https://doi.org/10.3390/en13133415
Vermeer W, Chandra Mouli GR, Bauer P. Real-Time Building Smart Charging System Based on PV Forecast and Li-Ion Battery Degradation. Energies. 2020; 13(13):3415. https://doi.org/10.3390/en13133415
Chicago/Turabian StyleVermeer, Wiljan, Gautham Ram Chandra Mouli, and Pavol Bauer. 2020. "Real-Time Building Smart Charging System Based on PV Forecast and Li-Ion Battery Degradation" Energies 13, no. 13: 3415. https://doi.org/10.3390/en13133415
APA StyleVermeer, W., Chandra Mouli, G. R., & Bauer, P. (2020). Real-Time Building Smart Charging System Based on PV Forecast and Li-Ion Battery Degradation. Energies, 13(13), 3415. https://doi.org/10.3390/en13133415