Underwater Noise Emission Due to Offshore Pile Installation: A Review


Abstract
1. Introduction
2. Structure-Borne Noise in Offshore Piling: The Historical Development of Models
2.1. First Generation Models: The Fluid Approximation of the Seabed
2.2. Second Generation Models: Inclusion of the Elastic Seabed
3. The State-Of-The-Art in Predictive Modelling of Sound
3.1. Empirical Models
3.2. Advanced Models: The Mathematical Statement of the Problem
3.3. Semi-Analytical Solution Methods
3.3.1. Close-Range Module
3.3.2. Far-Range Module
3.4. Numerical Solution Methods
3.4.1. CMST Model
3.4.2. TUHH Model
3.4.3. JASCO Model
3.4.4. SNU Model (Seoul National University Underwater Acoustics Group)
3.4.5. TNO Model
- Aquarius 2: Combines a detailed FE model of the pile and the surrounding environment with an efficient adiabatic range dependent normal mode model for shallow water sound propagation [95,101]. Aquarius 2 has been used in research projects in which detailed information of pile and hammer force were available. It is benchmarked against both COMPILE workshops [131,151].
- Aquarius 3: Is based on a novel efficient implementation of the hybrid propagation model ‘Soprano’ for range-dependent shallow waveguides developed by Sertlek et al. [163]. It combines the accuracy of an incoherent adiabatic range-dependent normal mode model with the speed of Weston’s flux integral approach. For this model the same point source level is used as for Aquarius 1.
3.4.6. LUH Model
3.4.7. UoS/NPL Model (University of Southampton and the National Physics Laboratory)
3.5. Overview of Available Models
4. Key Features in Noise Prediction
4.1. Evolution of Noise Metrics with Distance
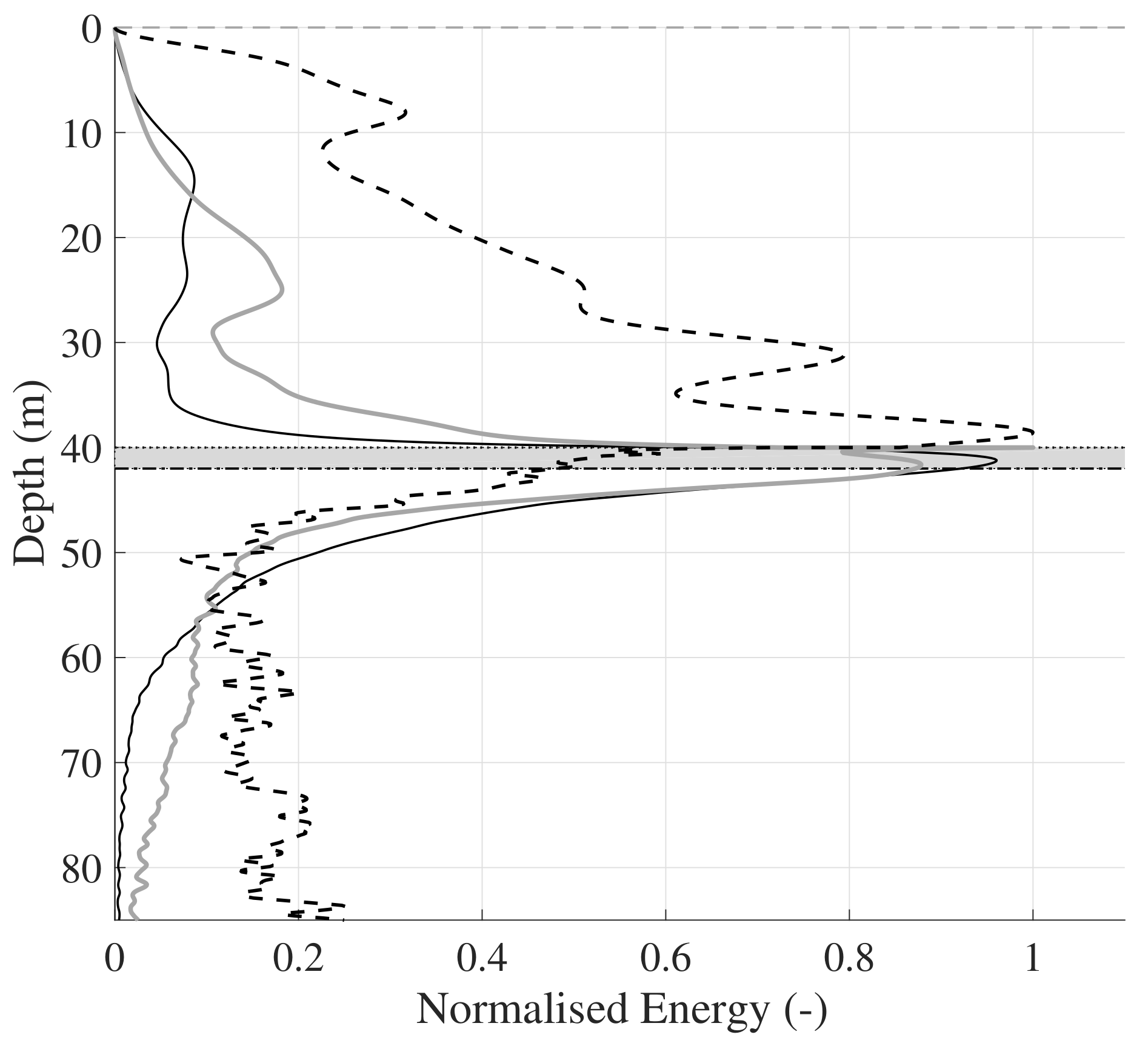
4.2. Energy Flux through the Seawater and the Seabed
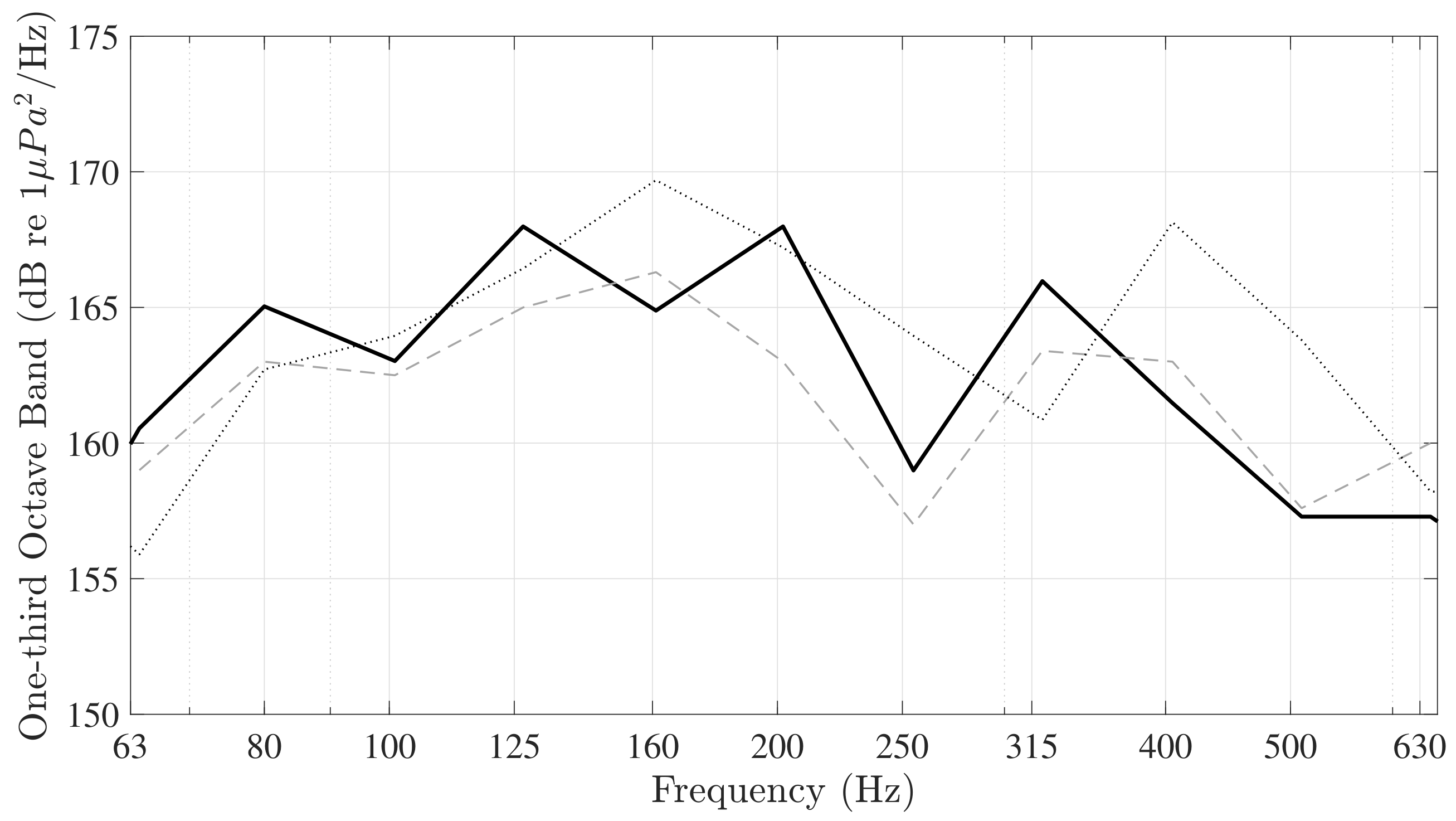
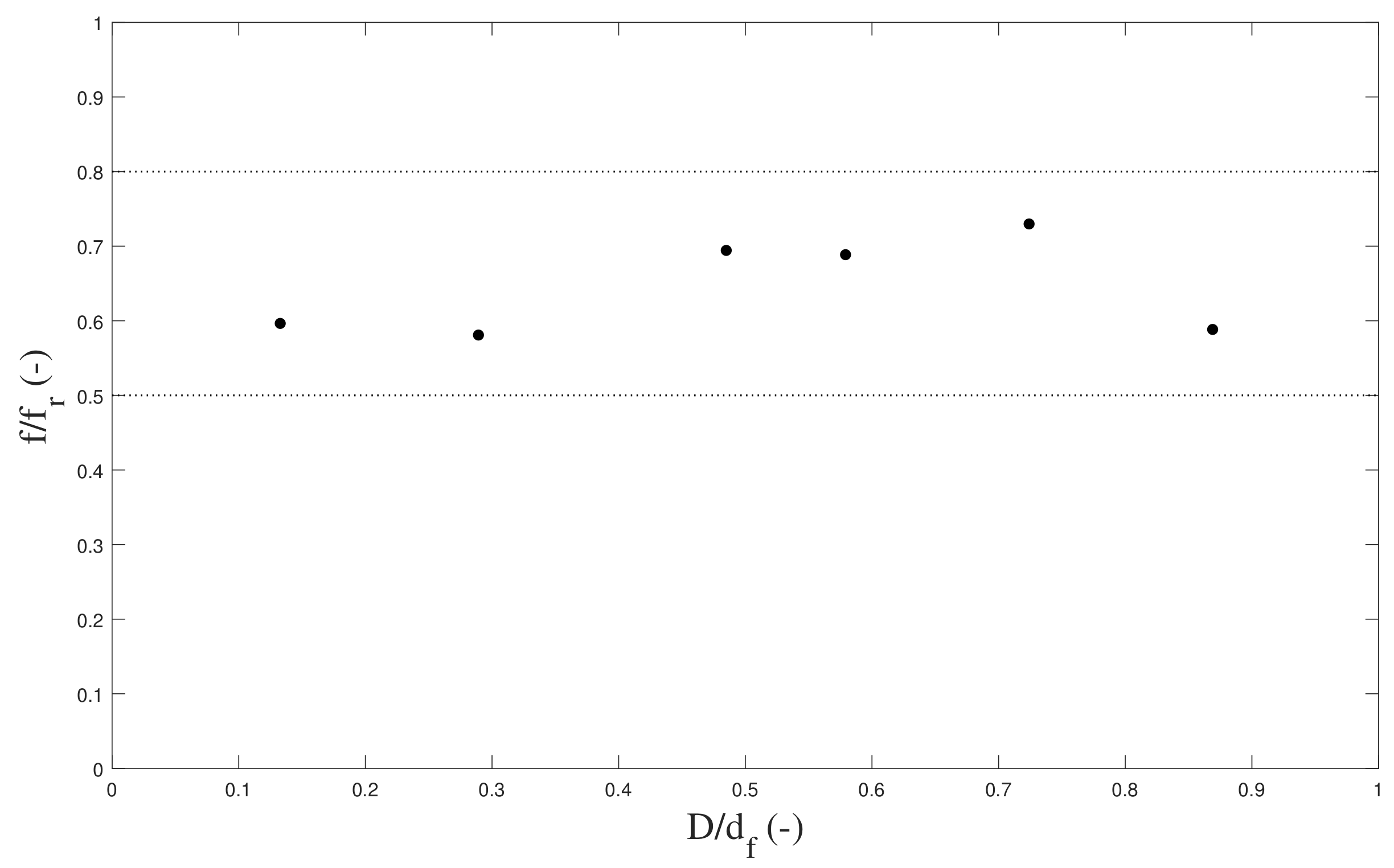
4.3. Noise Spectrum and Pile Size
5. Noise Mitigation Strategies
- casings that enclose the pile in the form of either a de-pressurised double-walled cylindrical shell [178] or lightweight inflatable fabrics which build an air-column around the pile and
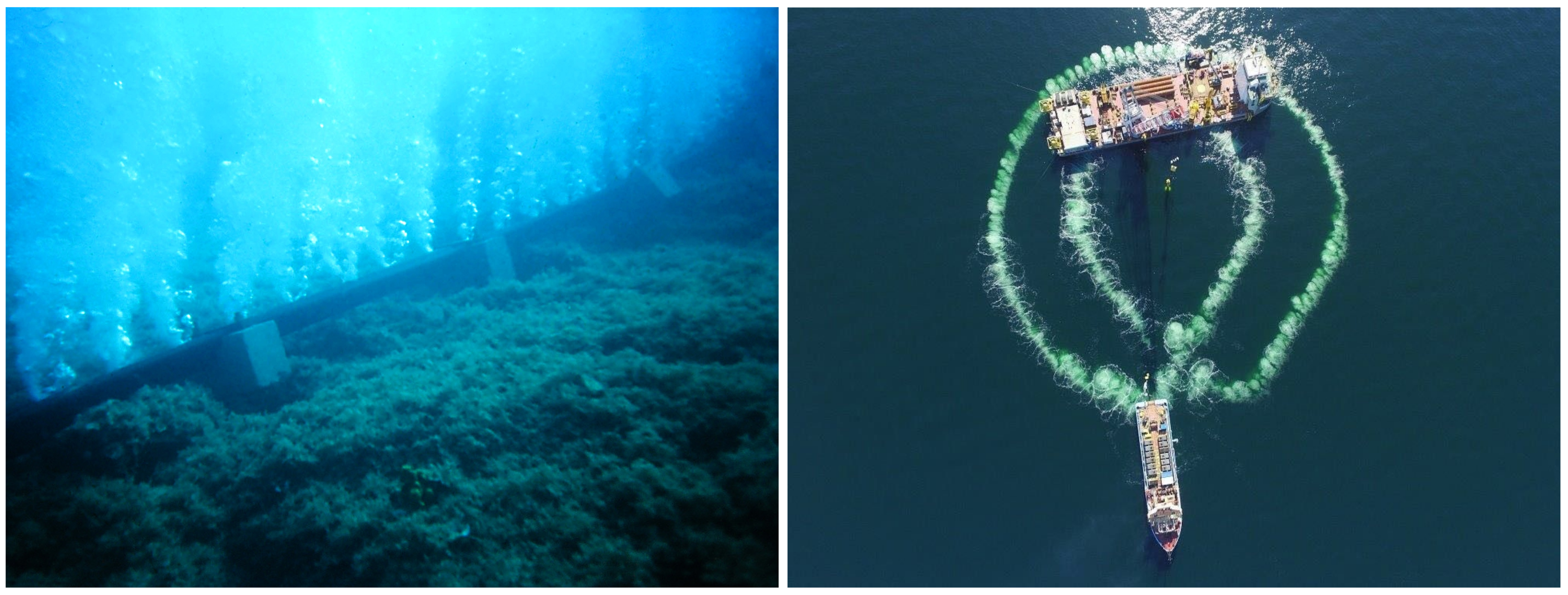
5.1. Air Bubble Curtains
5.1.1. Modelling the Air Bubble Curtain
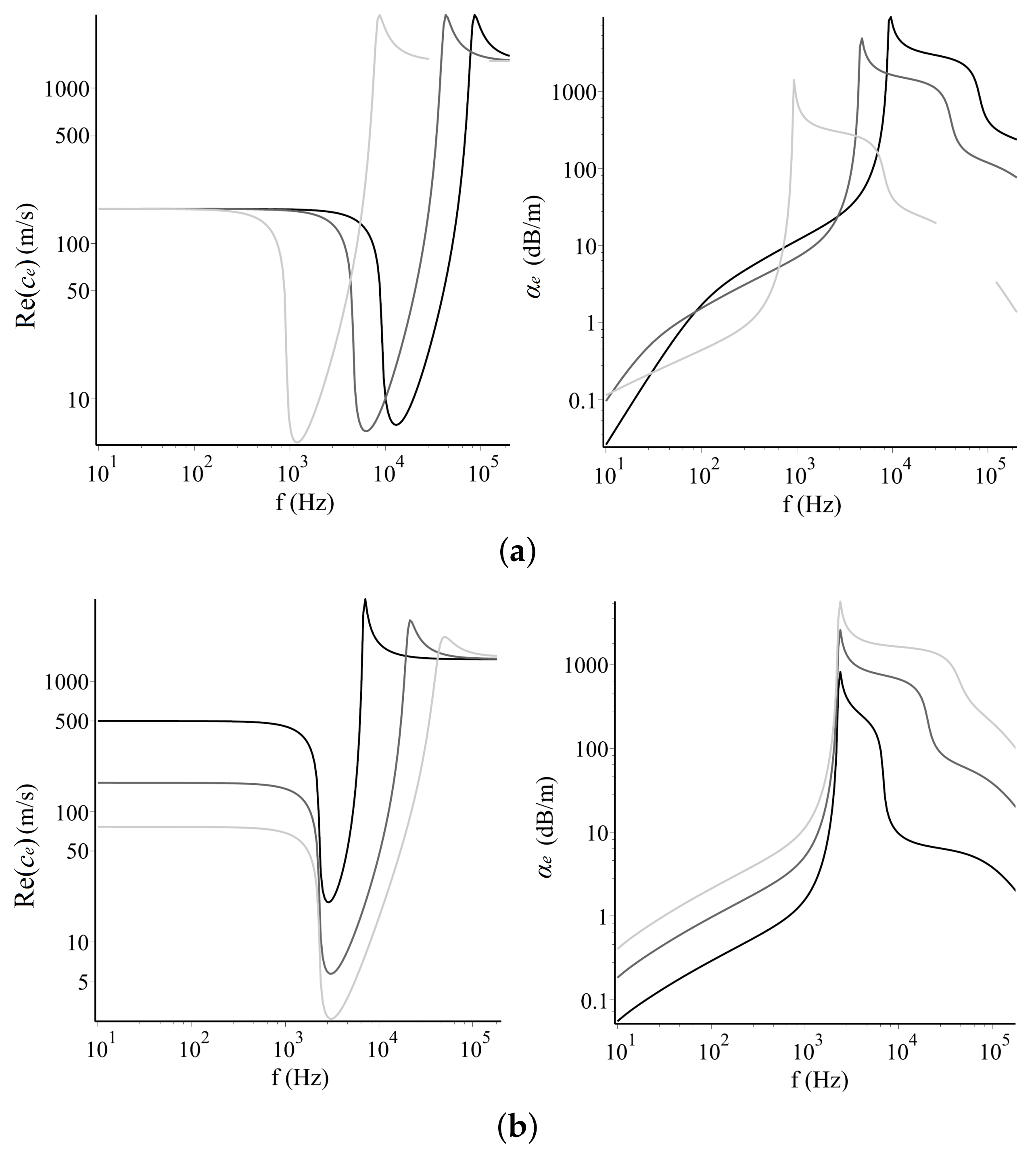
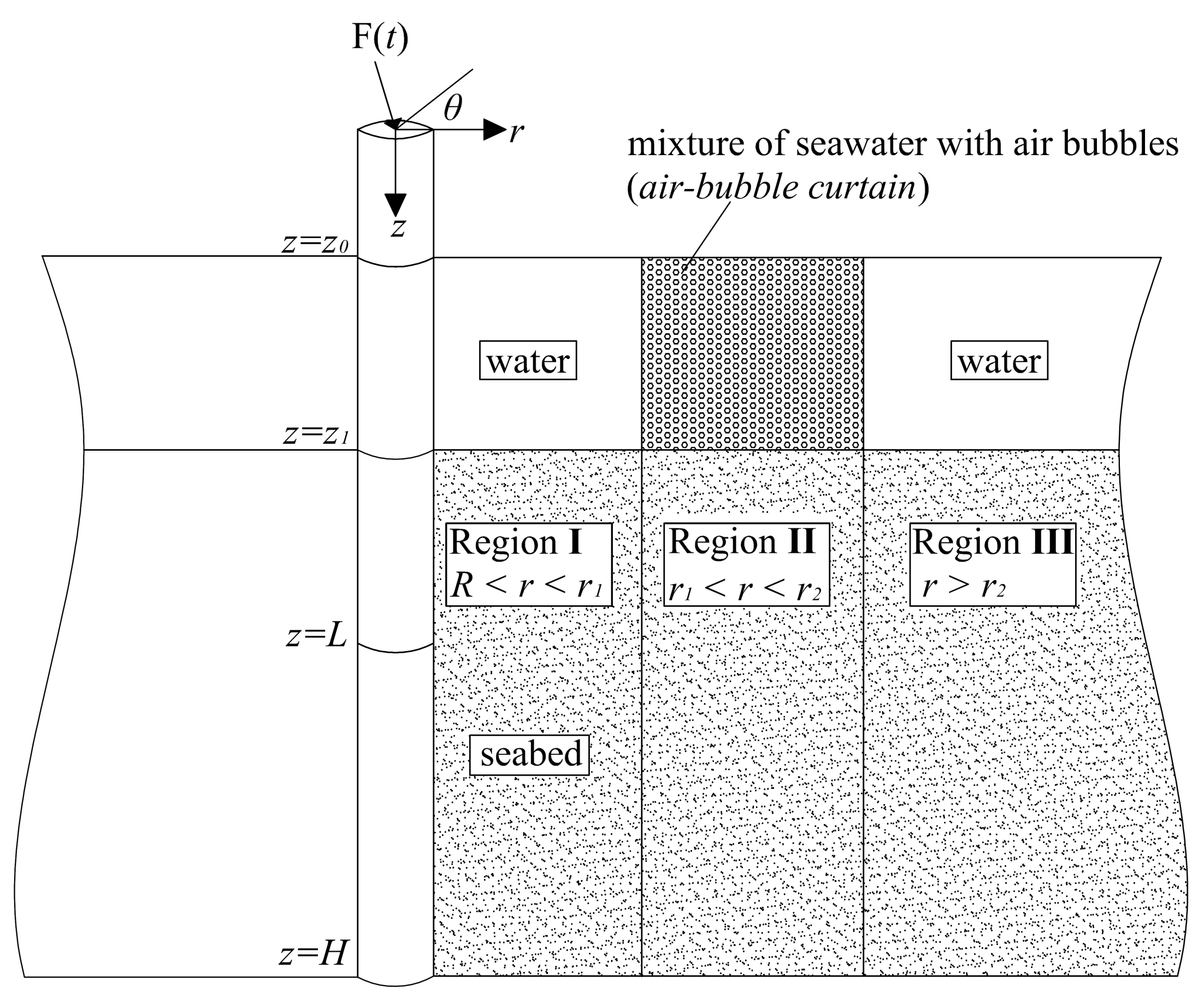
- The primary mechanism of noise reduction in the low-frequency range is the impedance mismatch between regions I and II (Figure 13). The attenuation of the waves in the bubbly layer seems not to be the governing factor in the noise reduction, mainly because of the relatively high resonance frequency of the small bubbles usually applied in practice (Figure 13).
- The effectiveness of the air bubble curtain is higher for an increased air–volume fraction in the bubbly medium (Figure 13). This has also been reported in [185]. An increase of the air–volume fraction results at a decreased wave velocity. This, in turn, yields a higher impedance contrast between the seawater and the bubbly medium (regions I and II).
- An increase in the thickness of the curtain does not lead to an increased noise reduction at the frequency range of interest in most cases. This holds for bubbly mixtures in which the principal mechanism of noise reduction is the impedance mismatch between the seawater and the air bubble curtain as explained earlier.
- The distance at which the bubble curtain is placed can influence its effectiveness. An increase in the horizontal distance leads to an increased noise reduction when all other parameters remain the same. This has been confirmed more recently by the cases analysed in [195], in which a more detailed explanation is given. This observation also explain why the noise reduction achieved by the BBC is superior to that of a LBC.
5.2. Pile Casings
5.2.1. Noise Mitigation Screens
5.2.2. Lightweight Inflatable Fabrics
5.3. Resonator-Type Systems
5.3.1. Hydro-Sound-Dampers (HSD)
- resonant effects of the air-filled balloons and the PE-foam elements fixed in the fishing net. The HSD-elements are adjustable both in terms of diameter and positioning on the net. Thus, they can be tuned in order to achieve optimum noise reduction at frequencies associated with the energy of acoustic waves of specific wavelengths;
- dissipation and material damping effects according to the chosen materials and the injected pressure in the air balloons; and
- reflection of the sound waves at the interface between the water and the fishing net caused by the impedance mismatch (although this mechanism is less efficient in this case compared to the case of a dense air bubble curtain).
5.3.2. Helmholtz Resonators (AdBm-NAS)
5.4. Overview of Mitigation Techniques and Spectral Insertion Loss
- No technique can reduce the noise levels effectively below 20 Hz.
- The noise reduction of all techniques is optimum at frequencies above 200 Hz.
- Only the double BBC and the NMS together with the BBC are capable of reducing the noise levels by more than 20 dB at frequencies ranging from 125 Hz up to 8 kHz. In the other techniques, the noise reduction is usually less and outside the frequency range of interest (>500 Hz).
- The spectral insertion loss depends strongly on the particular location as can be concluded by the application of the same system (BBC) in different projects.
6. Future Challenges
- Probabilistic modelling in which the uncertainties in the characterisation of the geometry or the properties of the acousto-elastic region are propagated at larger distances from the pile [155];
- Pile driving noise predictions in range- and/or angular-dependent environments.
- Simultaneous pile progression into the soil with noise prediction in the near-field (nonlinear pile-soil interaction).
- Challenges associated with the modelling of the various noise mitigation systems and demonstration of the efficacy of those systems for piles of larger diameters (8 m) and deeper waters (>45 m).
6.1. Advanced Modelling of the Seabed
6.2. Quantification and Propagation of Uncertainties
6.3. Three-Dimensional Domains and Non-Symmetric Responses
6.4. Pile Progression and Simultaneous Noise Prediction
6.5. Modelling the Noise Mitigation
7. Concluding Remarks
- Development of acoustic models suitable for vibro-piling and other installation technologies. Nowadays, all models focus on impact piling since this method is primarily used offshore and generates significant noise pollution. However, in order to reduce the costs, the offshore market will shift towards more silent methods of pile installation. Consequently, the need will arise to provide tools for noise assessment also in those cases.
- Modelling of the various noise mitigation systems to systematically study and optimise their deployment.
- Quantification and propagation of uncertainties in a systematic and computationally efficient manner to allow for sound judgements of the noise levels to be expected in different environments.
- Incorporation of three-dimensional domains and non-symmetric force excitations.
- Integration of the predictions by vibroacoustic models to the work accomplished by the marine biologists to provide unified tools for environmental impact assessment (EIA) studies.
Acknowledgments
Conflicts of Interest
References
- Breton, S.P.; Moe, G. Status, plans and technologies for offshore wind turbines in Europe and North America. Renew. Energy 2009, 34, 646–654. [Google Scholar] [CrossRef]
- Sun, X.; Huang, D.; Wu, G. The current state of offshore wind energy technology development. Energy 2012, 41, 298–312. [Google Scholar] [CrossRef]
- Athanasia, A.; Anne-Bénédicte, G.; Jacopo, M. The offshore wind market deployment: Forecasts for 2020, 2030 and impacts on the European supply chain development. Energy Procedia 2012, 24, 2–10. [Google Scholar] [CrossRef]
- Kaldellis, J.; Kapsali, M. Shifting towards offshore wind energy—Recent activity and future development. Energy Policy 2013, 53, 136–148. [Google Scholar] [CrossRef]
- Perveen, R.; Kishor, N.; Mohanty, S.R. Off-shore wind farm development: Present status and challenges. Renew. Sustain. Energy Rev. 2014, 29, 780–792. [Google Scholar] [CrossRef]
- Fried, L.; Shukla, S.; Sawyer, S. Chapter 26—Growth Trends and the Future of Wind Energy. In Wind Energy Engineering; Letcher, T.M., Ed.; Academic Press: Cambridge, MA, USA, 2017; pp. 559–586. [Google Scholar] [CrossRef]
- Bilgili, M.; Yasar, A.; Simsek, E. Offshore wind power development in Europe and its comparison with onshore counterpart. Renew. Sustain. Energy Rev. 2011, 15, 905–915. [Google Scholar] [CrossRef]
- Byrne, B.W.; Houlsby, G.T. Foundations for Offshore Wind Turbines. Philos. Trans. Math. Phys. Eng. Sci. 2003, 361, 2909–2930. [Google Scholar] [CrossRef]
- Oh, K.Y.; Nam, W.; Ryu, M.S.; Kim, J.Y.; Epureanu, B.I. A review of foundations of offshore wind energy convertors: Current status and future perspectives. Renew. Sustain. Energy Rev. 2018, 88, 16–36. [Google Scholar] [CrossRef]
- Wu, X.; Hu, Y.; Li, Y.; Yang, J.; Duan, L.; Wang, T.; Adcock, T.; Jiang, Z.; Gao, Z.; Lin, Z.; et al. Foundations of offshore wind turbines: A review. Renew. Sustain. Energy Rev. 2019, 104, 379–393. [Google Scholar] [CrossRef]
- Lozano-Minguez, E.; Kolios, A.; Brennan, F. Multi-criteria assessment of offshore wind turbine support structures. Renew. Energy 2011, 36, 2831–2837. [Google Scholar] [CrossRef]
- O’Kelly, B.; Arshad, M. 20—Offshore wind turbine foundations–analysis and design. In Offshore Wind Farms; Ng, C., Ran, L., Eds.; Woodhead Publishing: Cambridge, UK, 2016; pp. 589–610. [Google Scholar] [CrossRef]
- Negro, V.; López-Gutiérrez, J.S.; Esteban, M.D.; Alberdi, P.; Imaz, M.; Serraclara, J.M. Monopiles in offshore wind: Preliminary estimate of main dimensions. Ocean Eng. 2017, 133, 253–261. [Google Scholar] [CrossRef]
- European Wind Energy Association (EWEA). Offshore Wind in Europe—Key Trends and Statistics 2018; Technical Report; WindEurope asbl/vzw: Brussels, Belgium, 2019. [Google Scholar]
- Thomsen, K.E. Chapter Eleven—Commonly Used Installation Methods. In Offshore Wind; Thomsen, K.E., Ed.; Elsevier: Boston, MA, USA, 2012; pp. 157–184. [Google Scholar] [CrossRef]
- Jonker, G. Vibratory Pile Driving Hammers for Pile Installations and Soil Improvement Projects. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 27–30 April 1987. [Google Scholar] [CrossRef]
- Warrington, D. Theory and Development of Vibratory Pile-Driving Equipment. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 1989. [Google Scholar] [CrossRef]
- Viking, K. Vibro-Driveability—A Field Study of Vibratory Driven Sheet Piles in Non-Cohesive Soils. Ph.D. Thesis, KTH Byggvetenskap, Stockholm, Sweden, 2002. [Google Scholar]
- Tsouvalas, A. Underwater Noise Generated by Offshore Pile Driving. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2015. [Google Scholar] [CrossRef]
- Farcas, A.; Thompson, P.M.; Merchant, N.D. Underwater noise modelling for environmental impact assessment. Environ. Impact Assess. Rev. 2016, 57, 114–122. [Google Scholar] [CrossRef]
- Popper, A.; Hastings, M. The effects of anthropogenic sources of sound on fishes. J. Fish Biol. 2009, 75, 455–489. [Google Scholar] [CrossRef] [PubMed]
- Slabbekoorn, H.; Bouton, N.; van Opzeeland, I.; Coers, A.; ten Cate, C.; Popper, A.N. A noisy spring: The impact of globally rising underwater sound levels on fish. Trends Ecol. Evol. 2010, 25, 419–427. [Google Scholar] [CrossRef]
- Finneran, J.J. Noise-induced hearing loss in marine mammals: A review of temporary threshold shift studies from 1996 to 2015. J. Acoust. Soc. Am. 2015, 138, 1702–1726. [Google Scholar] [CrossRef]
- Erbe, C.; Dunlop, R.; Dolman, S. Effects of anthropogenic noise on animals. In Effects of Anthropogenic Noise on Animals; Springer: New York, NY, USA, 2018; pp. 277–309. [Google Scholar] [CrossRef]
- Bailey, H.; Senior, B.; Simmons, D.; Rusin, J.; Picken, G.; Thompson, P.M. Assessing underwater noise levels during pile-driving at an offshore windfarm and its potential effects on marine mammals. Mar. Pollution Bull. 2010, 60, 888–897. [Google Scholar] [CrossRef]
- Brandt, M.; Diederichs, A.; Betke, K.; Nehls, G. Responses of harbour porpoises to pile driving at the Horns Rev II offshore wind farm in the Danish North Sea. Mar. Ecol. Prog. Ser. 2011, 421, 205–216. [Google Scholar] [CrossRef]
- Tougaard, J.; Kyhn, L.A.; Amundin, M.; Wennerberg, D.; Bordin, C. Behavioral reactions of harbor porpoise to pile-driving noise. Adv. Exp. Med. Biol. 2012, 730, 277–280. [Google Scholar] [CrossRef]
- Dähne, M.; Gilles, A.; Lucke, K.; Peschko, V.; Adler, S.; Krügel, K.; Sundermeyer, J.; Siebert, U. Effects of pile-driving on harbour porpoises ( Phocoena phocoena ) at the first offshore wind farm in Germany. Environ. Res. Lett. 2013, 8, 025002. [Google Scholar] [CrossRef]
- Haelters, J.; Dulière, V.; Vigin, L.; Degraer, S. Towards a numerical model to simulate the observed displacement of harbour porpoises Phocoena phocoena due to pile driving in Belgian waters. Hydrobiologia 2015, 756, 105–116. [Google Scholar] [CrossRef]
- Carstensen, J.; Henriksen, O.; Teilmann, J. Impacts of offshore wind farm construction on harbour porpoises: Acoustic monitoring of echolocation activity using porpoise detectors (T-PODs). Mar. Ecol. Prog. Ser. 2006, 321, 295–308. [Google Scholar] [CrossRef]
- David, J. Likely sensitivity of bottlenose dolphins to pile-driving noise. Water Environ. J. 2006, 20, 48–54. [Google Scholar] [CrossRef]
- Madsen, P.; Wahlberg, M.; Tougaard, J.; Lucke, K.; Tyack, P. Wind turbine underwater noise and marine mammals: Implications of current knowledge and data needs. Mar. Ecol. Prog. Ser. 2006, 309, 279–295. [Google Scholar] [CrossRef]
- Herbert-Read, J.E.; Kremer, L.; Bruintjes, R.; Radford, A.N.; Ioannou, C.C. Anthropogenic noise pollution from pile-driving disrupts the structure and dynamics of fish shoals. Proc. R. Soc. B Biol. Sci. 2017, 284, 20171627. [Google Scholar] [CrossRef] [PubMed]
- Hastie, G.; Merchant, N.D.; Götz, T.; Russell, D.J.F.; Thompson, P.; Janik, V.M. Effects of impulsive noise on marine mammals: Investigating range-dependent risk. Ecol. Appl. 2019, 29, e01906. [Google Scholar] [CrossRef] [PubMed]
- Leunissen, E.M.; Dawson, S.M. Underwater noise levels of pile-driving in a New Zealand harbour, and the potential impacts on endangered Hector’s dolphins. Mar. Pollut. Bull. 2018, 135, 195–204. [Google Scholar] [CrossRef]
- Kastelein, R.A.; Hoek, L.; Gransier, R.; de Jong, C.A.F. Hearing thresholds of a harbor porpoise (Phocoena phocoena) for playbacks of multiple pile driving strike sounds. J. Acoust. Soc. Am. 2013, 134, 2302–2306. [Google Scholar] [CrossRef]
- Kastelein, R.A.; van Heerden, D.; Gransier, R.; Hoek, L. Behavioral responses of a harbor porpoise (Phocoena phocoena) to playbacks of broadband pile driving sounds. Mar. Environ. Res. 2013, 92, 206–214. [Google Scholar] [CrossRef]
- Kastelein, R.A.; Hoek, L.; Gransier, R.; Jennings, N. Hearing thresholds of two harbor seals (Phoca vitulina) for playbacks of multiple pile driving strike sounds. J. Acoust. Soc. Am. 2013, 134, 2307–2312. [Google Scholar] [CrossRef]
- Debusschere, E.; Hostens, K.; Adriaens, D.; Ampe, B.; Botteldooren, D.; De Boeck, G.; De Muynck, A.; Sinha, A.K.; Vandendriessche, S.; Van Hoorebeke, L.; et al. Acoustic stress responses in juvenile sea bass Dicentrarchus labrax induced by offshore pile driving. Environ. Pollut. 2016, 208, 747–757. [Google Scholar] [CrossRef]
- Bejder, L.; Samuels, A.; Whitehead, H.; Finn, H.; Allen, S. Impact assessment research: Use and misuse of habituation, sensitisation and tolerance in describing wildlife responses to anthropogenic stimuli. Mar. Ecol. Prog. Ser. 2009, 395, 177–185. [Google Scholar] [CrossRef]
- Teilmann, J.; Carstensen, J. Negative long term effects on harbour porpoises from a large scale offshore wind farm in the Baltic—Evidence of slow recovery. Environ. Res. Lett. 2012, 7, 045101. [Google Scholar] [CrossRef]
- Thompson, P.M.; Hastie, G.D.; Nedwell, J.; Barham, R.; Brookes, K.L.; Cordes, L.S.; Bailey, H.; McLean, N. Framework for assessing impacts of pile-driving noise from offshore wind farm construction on a harbour seal population. Environ. Impact Assess. Rev. 2013, 43, 73–85. [Google Scholar] [CrossRef]
- Russell, D.J.; Hastie, G.D.; Thompson, D.; Janik, V.M.; Hammond, P.S.; Scott-Hayward, L.A.; Matthiopoulos, J.; Jones, E.L.; McConnell, B.J. Avoidance of wind farms by harbour seals is limited to pile driving activities. J. Appl. Ecol. 2016, 53, 1642–1652. [Google Scholar] [CrossRef]
- Graham, I.M.; Merchant, N.D.; Farcas, A.; Barton, T.R.; Cheney, B.; Bono, S.; Thompson, P.M. Harbour porpoise responses to pile-driving diminish over time. R. Soc. Open Sci. 2019, 6, 190335. [Google Scholar] [CrossRef]
- Dahl, P.H.; Dall’Osto, D.R.; Farrell, D.M. The underwater sound field from vibratory pile driving. J. Acoust. Soc. Am. 2015, 137, 3544–3554. [Google Scholar] [CrossRef]
- Tsouvalas, A.; Metrikine, A. Structure-Borne Wave Radiation by Impact and Vibratory Piling in Offshore Installations: From Sound Prediction to Auditory Damage. J. Mar. Sci. Eng. 2016, 4, 44. [Google Scholar] [CrossRef]
- Paiva, E.G.; Salgado Kent, C.P.; Gagnon, M.M.; McCauley, R.; Finn, H. Reduced Detection of Indo-Pacific Bottlenose Dolphins (Tursiops aduncus) in an Inner Harbour Channel During Pile Driving Activities. Aquat. Mamm. 2015, 41, 455–468. [Google Scholar] [CrossRef]
- Graham, I.M.; Pirotta, E.; Merchant, N.D.; Farcas, A.; Barton, T.R.; Cheney, B.; Hastie, G.D.; Thompson, P.M. Responses of bottlenose dolphins and harbor porpoises to impact and vibration piling noise during harbor construction. Ecosphere 2017, 8, e01793. [Google Scholar] [CrossRef]
- Nehls, G.; Rose, A.; Diederichs, A.; Bellmann, M.; Pehlke, H. Noise Mitigation During Pile Driving Efficiently Reduces Disturbance of Marine Mammals. In Advances in Experimental Medicine and Biology; Springer: New York, NY, USA, 2016; pp. 755–762. [Google Scholar] [CrossRef]
- Dähne, M.; Tougaard, J.; Carstensen, J.; Rose, A.; Nabe-Nielsen, J. Bubble curtains attenuate noise from offshore wind farm construction and reduce temporary habitat loss for harbour porpoises. Mar. Ecol. Prog. Ser. 2017, 580, 221–237. [Google Scholar] [CrossRef]
- Compton, R.; Goodwin, L.; Handy, R.; Abbott, V. A critical examination of worldwide guidelines for minimising the disturbance to marine mammals during seismic surveys. Mar. Policy 2008, 32, 255–262. [Google Scholar] [CrossRef]
- Erbe, C. International regulation of underwater noise. Acoust. Aust. 2013, 41, 12–19. [Google Scholar]
- Williams, R.; Erbe, C.; Ashe, E.; Clark, C.W. Quiet(er) marine protected areas. Mar. Pollut. Bull. 2015, 100, 154–161. [Google Scholar] [CrossRef] [PubMed]
- Dolman, S.J.; Jasny, M. Evolution of Marine Noise Pollution Management. Aquat. Mamm. 2015, 41, 357–374. [Google Scholar] [CrossRef]
- Rossington, K.; Benson, T.; Lepper, P.; Jones, D. Eco-hydro-acoustic modeling and its use as an EIA tool. Mar. Pollut. Bull. 2013, 75, 235–243. [Google Scholar] [CrossRef]
- Werner, S. Towards a Precautionary Approach for Regulation of Noise Introduction in the Marine Environment from Pile Driving; Federal Environmental Agency: Stralsund, Germany, 2010.
- Lucke, K.; Siebert, U.; Lepper, P.A.; Blanchet, M.A. Temporary shift in masked hearing thresholds in a harbor porpoise (Phocoena phocoena) after exposure to seismic airgun stimuli. J. Acoust. Soc. Am. 2009, 125, 4060–4070. [Google Scholar] [CrossRef]
- Ainslie, M.A. Standard for Measurement and Monitoring of Underwater Noise, Part I. Physical Quantities and Their Units; Report No. TNO-DV 2011 C235; Nederlandse Organisatie voor Toegepast-Natuurwetenschappelijk Onderzoek (TNO): Den Haag, The Netherlands, 2011. [Google Scholar]
- De Jong, C.A.F.; Ainslie, M.A.; Blacquière, G. Standard for Measurement and Monitoring of Underwater Noise, Part II: Procedures for Measuring Underwater Noise in Connection with Offshore wind Farm Licensing; Report No. TNO-DV 2011 C251; Nederlandse Organisatie voor Toegepast-Natuurwetenschappelijk Onderzoek (TNO): Den Haag, The Netherlands, 2011. [Google Scholar]
- Brandt, M.J.; Höschle, C.; Diederichs, A.; Betke, K.; Matuschek, R.; Nehls, G. Seal scarers as a tool to deter harbour porpoises from offshore construction sites. Mar. Ecol. Prog. Ser. 2013, 475, 291–302. [Google Scholar] [CrossRef]
- Joint Nature Conservation Committee. Statutory Nature Conservation Agency Protocol for Minimising the Risk Injury to Marine Mammals from Piling Noise; JNCC: Aberdeen, UK, 2010. [Google Scholar]
- Dolman, S.; Simmonds, M. Towards best environmental practice for cetacean conservation in developing Scotland’s marine renewable energy. Mar. Policy 2010, 34, 1021–1027. [Google Scholar] [CrossRef]
- Bailey, H.; Brookes, K.L.; Thompson, P.M. Assessing environmental impacts of offshore wind farms: Lessons learned and recommendations for the future. Aquat. Biosyst. 2014, 10, 8. [Google Scholar] [CrossRef]
- Schaffeld, T.; Ruser, A.; Woelfing, B.; Baltzer, J.; Kristensen, J.H.; Larsson, J.; Schnitzler, J.G.; Siebert, U. The use of seal scarers as a protective mitigation measure can induce hearing impairment in harbour porpoises. J. Acoust. Soc. Am. 2019, 146, 4288–4298. [Google Scholar] [CrossRef]
- Tougaard, J.; Dähne, M. Why is auditory frequency weighting so important in regulation of underwater noise? J. Acoust. Soc. Am. 2017, 142, EL415–EL420. [Google Scholar] [CrossRef] [PubMed]
- Stöber, U.; Thomsen, F. Effect of impact pile driving noise on marine mammals: A comparison of different noise exposure criteria. J. Acoust. Soc. Am. 2019, 145, 3252–3259. [Google Scholar] [CrossRef] [PubMed]
- Etter, P. Underwater Acoustic Modeling and Simulation, 4th ed.; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar] [CrossRef]
- Urick, R. Principles of Underwater Sound, 3rd ed.; Peninsula Publishing: Los Altos, CA, USA, 2013. [Google Scholar]
- Bjørnø, L. Fundamentals of ocean acoustics. Ultrasonics 1983, 21, 237. [Google Scholar] [CrossRef]
- Adam, J.A. Ocean Acoustics. In Rays, Waves, and Scattering; Princeton University Press: Princeton, NJ, USA, 2017; pp. 237–254. [Google Scholar] [CrossRef]
- Kuperman, W.; Roux, P. Underwater Acoustics. In Springer Handbook of Acoustics; Springer: New York, NY, USA, 2007; pp. 149–204. [Google Scholar] [CrossRef]
- Ainslie, M. Principles of Sonar Performance Modelling; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Kuperman, W.A.; Lynch, J.F. Shallow-Water Acoustics. Phys. Today 2004, 57, 55–61. [Google Scholar] [CrossRef]
- Jensen, F.; Kuperman, W.; Porter, M.; Schmidt, H. Computational Ocean Acoustics; Modern Acoustics and Signal Processing; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Katsnelson, B.; Petnikov, V.; Lynch, J. Fundamentals of Shallow Water Acoustics; Springer: Boston, MA, USA, 2012. [Google Scholar] [CrossRef]
- Lynch, J.F.; Newhall, A.E. Chapter 7—Shallow-Water Acoustics. In Applied Underwater Acoustics; Neighbors, T.H., Bradley, D., Eds.; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar] [CrossRef]
- Pecknold, S.; Osler, J.C. Sensitivity of acoustic propagation to uncertainties in the marine environment as characterized by various rapid environmental assessment methods. Ocean Dyn. 2012, 62, 265–281. [Google Scholar] [CrossRef]
- Duncan, A.J.; Gavrilov, A.N.; Koessler, M.W. The influence of finely layered seabeds on acoustic propagation in shallow water. In Proceedings of the INTERNOISE 2014—43rd International Congress on Noise Control Engineering: Improving the World through Noise Control, Melbourne, Australia, 16–19 November 2014. [Google Scholar]
- Buckingham, M. Sound Propagation. In Applied Underwater Acoustics; Elsevier: Amsterdam, The Netherlands, 2017; pp. 85–184. [Google Scholar] [CrossRef]
- Rodkin, R.B.; Reyff, J.A. Underwater sound pressures from marine pile driving. J. Acoust. Soc. Am. 2004. [Google Scholar] [CrossRef]
- Hastings, M.C. Prediction of underwater noise from large cylindrical piles being driven by impact hammers. In Proceedings of the Institute of Noise Control Engineering of the USA—22nd National Conference on Noise Control Engineering (Noise-Con 2007), Reno, NV, USA, 22–24 October 2007. [Google Scholar]
- Duncan, A.J.; McCauley, R.D.; Parnum, I.; Salgado-Kent, C. Measurement and modelling of underwater noise from pile driving. In Proceedings of the 20th International Congress on Acoustics 2010 (ICA 2010), Sydney, Australia, 23–27 August 2010. [Google Scholar]
- Reinhall, P.G.; Dahl, P.H. Underwater Mach wave radiation from impact pile driving: Theory and observation. J. Acoust. Soc. Am. 2011, 130, 1209–1216. [Google Scholar] [CrossRef]
- Collins, M.D. A split-step Padé solution for the parabolic equation method. J. Acoust. Soc. Am. 1993, 93, 1736–1742. [Google Scholar] [CrossRef]
- Berenger, J.P. A perfectly matched layer for the absorption of electromagnetic waves. J. Comput. Phys. 1994, 114, 185–200. [Google Scholar] [CrossRef]
- Plotkin, K.J. State of the art of sonic boom modeling. J. Acoust. Soc. Am. 2002, 111, 530–536. [Google Scholar] [CrossRef]
- Krylov, V.V. Generation of ground vibrations by superfast trains. Appl. Acoust. 1995, 44, 149–164. [Google Scholar] [CrossRef]
- Thompson, D.J.; Kouroussis, G.; Ntotsios, E. Modelling, simulation and evaluation of ground vibration caused by rail vehicles. Veh. Syst. Dyn. 2019, 57, 936–983. [Google Scholar] [CrossRef]
- Beam forming of the underwater sound field from impact pile driving. J. Acoust. Soc. Am. 2013, 134, EL1–EL6. [CrossRef] [PubMed]
- Dahl, P.H.; Dall’Osto, D.R. On the underwater sound field from impact pile driving: Arrival structure, precursor arrivals, and energy streamlines. J. Acoust. Soc. Am. 2017, 142, 1141–1155. [Google Scholar] [CrossRef]
- Lippert, T.; Lippert, S. Modelling of pile driving noise by means of wavenumber integration. Acoust. Aust. 2012, 40, 178–182. [Google Scholar]
- Zampolli, M.; Nijhof, M.J.; Ainslie, M.A.; De Jong, C.A.; Jansen, E.H.; Abawi, A.T. Quantitative predictions of impact pile driving noise in water using a hybrid finite-element propagation model. J. Acoust. Soc. Am. 2012, 131, 3392. [Google Scholar] [CrossRef]
- Lippert, T.; Heitmann, K.; Ruhnau, M.; Lippert, S.; Von Estorff, O. On the prediction of pile drivimg induced underwater sound pressure levels over long ranges. In Proceedings of the 20th International Congress on Sound and Vibration 2013 (ICSV 2013), Bangkok, Thailand, 9–11 July 2013. [Google Scholar]
- Lippert, T.; von Estorff, O. On a Hybrid Model for the Prediction of Pile Driving Noise from Offshore Wind Farms. Acta Acust. United Acustica 2014, 100, 244–253. [Google Scholar] [CrossRef]
- Nijhof, M.J.; Binnerts, B.; De Jong, C.A.; Ainslie, M.A. An efficient model for prediction of underwater noise due to pile driving at large ranges. In Proceedings of the INTERNOISE 2014—43rd International Congress on Noise Control Engineering: Improving the World through Noise Control, Melbourne, Australia, 16–19 November 2014. [Google Scholar]
- Göttsche, K.; Steinhagen, U.; Juhl, P. Numerical evaluation of pile vibration and noise emission during offshore pile driving. Appl. Acoust. 2015, 99, 51–59. [Google Scholar] [CrossRef]
- Wilkes, D.R.; Gourlay, T.P.; Gavrilov, A.N. Numerical Modeling of Radiated Sound for Impact Pile Driving in Offshore Environments. IEEE J. Ocean. Eng. 2016, 41, 1072–1078. [Google Scholar] [CrossRef]
- MacGillivray, A. A model for underwater sound levels generated by marine impact pile driving. Proc. Meet. Acoust. 2013, 20, 045008. [Google Scholar] [CrossRef]
- MacGillivray, A.O. Finite difference computational modeling of marine impact pile driving. J. Acoust. Soc. Am. 2014, 136, 2206. [Google Scholar] [CrossRef]
- MacGillivray, A.O. Finite difference computational modeling of marine impact pile driving. In Proceedings of the 2015 Euronoise Conference, Maastrcht, The Netherlands, 1–3 June 2015; Volume 136, pp. 623–628. [Google Scholar]
- Zampolli, M.; Nijhof, M.J.J.; de Jong, C.A.F.; Ainslie, M.A.; Jansen, E.H.W.; Quesson, B.A.J. Validation of finite element computations for the quantitative prediction of underwater noise from impact pile driving. J. Acoust. Soc. Am. 2013, 133, 72–81. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Potty, G.R.; Dossot, G.; Smith, K.B.; Miller, J.H. Long range propagation modeling of offshore wind turbine construction noise using Finite Element and Parabolic Equation models. In Proceedings of the 2012 Oceans—Yeosu, Yeosu, Korea, 21–24 May 2012. [Google Scholar] [CrossRef]
- Schecklman, S.; Laws, N.; Zurk, L.M.; Siderius, M. A computational method to predict and study underwater noise due to pile driving. J. Acoust. Soc. Am. 2015, 138, 258–266. [Google Scholar] [CrossRef] [PubMed]
- Masoumi, H.; Degrande, G.; Lombaert, G. Prediction of free field vibrations due to pile driving using a dynamic soil-structure interaction formulation. Soil Dyn. Earthq. Eng. 2007, 27, 126–143. [Google Scholar] [CrossRef]
- Masoumi, H.; Degrande, G. Numerical modeling of free field vibrations due to pile driving using a dynamic soil-structure interaction formulation. J. Comput. Appl. Math. 2008, 215, 503–511. [Google Scholar] [CrossRef]
- Masoumi, H.R.; Francsois, S.; Degrande, G. A nonlinear coupled finite element-boundary element model for the prediction of vibrations due to vibratory and impact pile driving. Int. J. Numer. Anal. Methods Geomech. 2009, 33, 245–274. [Google Scholar] [CrossRef]
- Tsouvalas, A.; Metrikine, A.V. A semi-analytical model for the prediction of underwater noise from offshore pile driving. J. Sound Vib. 2013, 332, 3232–3257. [Google Scholar] [CrossRef]
- Hall, M.V. A semi-analytical model for non-mach peak pressure of underwater acoustic pulses from offshore pile driving. Acoust. Aust. 2013, 41, 42–51. [Google Scholar]
- Hall, M.V. Analytical model for the sound pressure waveform radiated under water when an offshore steel pipe pile is driven with an impact hammer. In Proceedings of the INTERNOISE 2014—43rd International Congress on Noise Control Engineering: Improving the World through Noise Control, Melbourne, Australia, 16–19 November 2014. [Google Scholar]
- Hall, M.V. An analytical model for the underwater sound pressure waveforms radiated when an offshore pile is driven. J. Acoust. Soc. Am. 2015, 138, 795–806. [Google Scholar] [CrossRef]
- Deng, Q.; Jiang, W.; Tan, M.; Xing, J.T. Modeling of offshore pile driving noise using a semi-analytical variational formulation. Appl. Acoust. 2016, 104, 85–100. [Google Scholar] [CrossRef]
- Deng, Q.; Jiang, W.; Zhang, W. Theoretical investigation of the effects of the cushion on reducing underwater noise from offshore pile driving. J. Acoust. Soc. Am. 2016, 140, 2780–2793. [Google Scholar] [CrossRef] [PubMed]
- Junger, M.; Feit, D. Sound, Structures and their interaction; MIT Press: Cambridge, MA, USA, 1986; pp. 294–298. [Google Scholar]
- Zhang, Z.Y.; Tindle, C.T. Improved equivalent fluid approximations for a low shear speed ocean bottom. J. Acoust. Soc. Am. 1995, 98, 3391–3396. [Google Scholar] [CrossRef]
- Tsouvalas, A.; Metrikine, A.V. A three-dimensional vibroacoustic model for the prediction of underwater noise from offshore pile driving. J. Sound Vib. 2014, 333, 2283–2311. [Google Scholar] [CrossRef]
- Tsouvalas, A.; Metrikine, A.V. A Three-Dimensional Semi-analytical Model for the Prediction of Underwater Noise Generated by Offshore Pile Driving. In Lecture Notes in Mechanical Engineering; Springer: Berlin/Heidelberg, Germany, 2014; pp. 259–264. [Google Scholar] [CrossRef]
- Tsouvalas, A.; Metrikine, A. Wave radiation from vibratory and impact pile driving in a layered acousto-elastic medium. In Proceedings of the 9th International Conference on Structural Dynamics, Porto, Portugal, 30 June–2 July 2014; pp. 3137–3144. [Google Scholar]
- Tsouvalas, A.; Hendrikse, H.; Metrikine, A. The completeness of the set of modes for various waveguides and its significance for the near-field interaction with vibrating structures. In Proceedings of the 9th International Conference on Structural Dynamics, Porto, Portugal, 30 June–2 July 2014; pp. 3137–3144. [Google Scholar]
- Kim, H. Prediction of Structure Borne Noise Radiation and Propagation from Offshore Impact Pile Driving. Ph.D. Thesis, University of Rhode Island, Kingston, RI, USA, 2014. [Google Scholar]
- Fricke, M.B.; Rolfes, R. Towards a complete physically based forecast model for underwater noise related to impact pile driving. J. Acoust. Soc. Am. 2015, 137, 1564–1575. [Google Scholar] [CrossRef] [PubMed]
- Pop, C.; Zania, V.; Trimoreau, B. Numerical modelling of offshore pile driving. In Proceedings of the XVI European Conference on Soil Mechanics and Geotechnical Engineering (ECSMGE 2015), Edinburgh, UK, 13–17 September 2015. [Google Scholar]
- Wilkes, D.R.; Gavrilov, A. Numerical Modelling of Sound Radiation from Marine Pile Driving over Elastic Seabeds. In Lecture Notes in Mechanical Engineering; Springer: Berlin/Heidelberg, Germany, 2016; pp. 107–112. [Google Scholar] [CrossRef]
- Wood, M.A. Modelling and Prediction of Acoustic Disturbances from Off-Shore Piling. Ph.D. Thesis, University of Southampton, Southampton, UK, 2016. [Google Scholar]
- Ruhnau, M.; Heitmann, K.; Lippert, T.; Lippert, S.; Von Estorff, O. Understanding soil transmission paths of offshore pile driving noise - Seismic waves and their implications. In Proceedings of the INTER-NOISE 2016—45th International Congress and Exposition on Noise Control Engineering: Towards a Quieter Future, Hamburg, Germany, 21–24 August 2016. [Google Scholar]
- Hazelwood, R.A.; Macey, P.C. Modeling Water Motion near Seismic Waves Propagating across a Graded Seabed, as Generated by Man-Made Impacts. J. Mar. Sci. Eng. 2016, 4, 47. [Google Scholar] [CrossRef]
- Mercer, J. Colossus Revisited: A Review and Extension of the Marsh-Schulkin Shallow Water Transmission Loss Model (1962); Defense Technical Information Center: Fort Belvoir, VA, USA, 1985. [Google Scholar]
- Hall, M.V. On modelling the seabed in order to predict low-frequency acoustic Transmission Loss in shallow water. In Proceedings of the Annual Conference of the Australian Acoustical Society (AAS’08), Geelong, Australia, 24–26 November 2008. [Google Scholar]
- Duncan, A.J.; Parsons, M.J. How wrong can you be? Can a simple spreading formula be used to predict worst-case underwater sound levels? In Proceedings of the Australian Acoustical Society Conference 2011, Acoustics 2011: Breaking New Ground, Gold Coast, QLD, Australia, 2–4 November 2011.
- Ainslie, M.A.; Dahl, P.H.; de Jong, C.; Laws, R.M.; Hague, T.; Ainslie, M.A. Practical Spreading Laws: The Snakes and Ladders. In Proceedings of the UA2014—2nd International Conference and Exhibition on Underwater Acoustics, Rhodes, Greece, 22–27 June 2014. [Google Scholar]
- Lippert, T.; Galindo-Romero, M.; Gavrilov, A.N.; von Estorff, O. Empirical estimation of peak pressure level from sound exposure level. Part II: Offshore impact pile driving noise. J. Acoust. Soc. Am. 2015, 138, EL287–EL292. [Google Scholar] [CrossRef]
- Lippert, T.; Ainslie, M.A.; von Estorff, O. Pile driving acoustics made simple: Damped cylindrical spreading model. J. Acoust. Soc. Am. 2018, 143, 310–317. [Google Scholar] [CrossRef]
- Martin, S.B.; Barclay, D.R. Determining the dependence of marine pile driving sound levels on strike energy, pile penetration, and propagation effects using a linear mixed model based on damped cylindrical spreading. J. Acoust. Soc. Am. 2019, 146, 109–121. [Google Scholar] [CrossRef]
- Farrell, D.M.; Dahl, P.H. Transmission loss for vibratory pile driving in shallow water: Modeling and field measurements for a Puget Sound location. J. Acoust. Soc. Am. 2013, 134, 4025. [Google Scholar] [CrossRef]
- Technical Committee: ISO/TC 43/SC 3 Underwater Acoustics. In ISO 18405:2017 Underwater acoustics—Terminology; American National Standards Institute: Washington, DC, USA, 2017; p. 51.
- Deeks, A.J.; Randolph, M.F. Analytical modelling of hammer impact for pile driving. Int. J. Numer. Anal. Methods Geomech. 1993, 17, 279–302. [Google Scholar] [CrossRef]
- Zingoni, A. (Ed.) Advances in Engineering Materials, Structures and Systems: Innovations, Mechanics and Applications; CRC Press: London, UK, 2019; pp. 103–108. [Google Scholar] [CrossRef]
- Soedel, W. Vibrations of Shells and Plates; Taylor and Francis: Abingdon, UK, 2005; pp. 294–298. [Google Scholar]
- Leissa, A.W. Vibration of shells; Scientific and Technical Information Office, National Aeronautics and Space Administration: Washington, DC, USA, 1973; 428p. [Google Scholar]
- Kaplunov, J.D.; Kossovich, L.Y.; Nolde, E.V. Dynamics of Thin Walled Elastic Bodies; Academic Press: Cambridge, MA, USA, 1998; pp. 129–134. [Google Scholar]
- Tsouvalas, A.; Peng, Y.; Metrikine, A. Underwater Noise Generated By Offshore Pile Driving: A Pile-Soil-Water Vibroacoustic Model Based On A Mode Matching Method. In Proceedings of the 5th Underwater Acoustics Conference and Exhibition 2019 (UACE2019), Hersonissos, Greece, 30 June–5 July 2019; pp. 667–674. [Google Scholar]
- Lothar, C.; Heckl, M.; Bjorn, A.; Petersson, A.T. Structure-Born Sound: Structural Vibrations and Sound Radiation at Audio Frequencies; Springer: Berlin/Heidelberg, Germany, 2005; p. 191. [Google Scholar]
- Tsouvalas, A.; van Dalen, K.N.; Metrikine, A.V. The significance of the evanescent spectrum in structure-waveguide interaction problems. J. Acoust. Soc. Am. 2015, 138, 2574–2588. [Google Scholar] [CrossRef] [PubMed]
- Nealy, J.L.; Collis, J.M.; Frank, S.D. Normal mode solutions for seismo-acoustic propagation resulting from shear and combined wave point sources. J. Acoust. Soc. Am. 2016, 139, EL95–EL99. [Google Scholar] [CrossRef] [PubMed]
- Ewing, W.; Jardetzky, W.; Press, F.; Observatory, L.G. Elastic Waves in Layered Media; McGraw Hill Book Company Inc.: New York, NY, USA, 1957. [Google Scholar]
- Bakr, A.A. Axisymmetric Potential Problems. In The Boundary Integral Equation Method in Axisymmetric Stress Analysis Problems; Springer: Berlin/Heidelberg, Germany, 1986; pp. 6–38. [Google Scholar] [CrossRef]
- Beskos, D.E. Boundary Element Methods in Dynamic Analysis. Appl. Mech. Rev. 1987, 40, 1–23. [Google Scholar] [CrossRef]
- Kontoni, D.P.N.; Beskos, D.E.; Manolis, G.D. Uniform half-plane elastodynamic problems by an approximate boundary element method. Soil Dyn. Earthq. Eng. 1987, 6, 227–238. [Google Scholar] [CrossRef]
- Beskos, D.E. Boundary Element Methods in Dynamic Analysis: Part II (1986–1996). Appl. Mech. Rev. 1997, 50, 149–197. [Google Scholar] [CrossRef]
- Achenbach, J.D. Wave Propagation in Elastic Solids; North Holland Publishing Company: Amsterdam, The Netherlands, 1973. [Google Scholar]
- Pak, R.Y.S.; Guzina, B.B. Three-Dimensional Green’s Functions for a Multilayered Half-Space in Displacement Potentials. J. Eng. Mech. 2002, 128, 449–461. [Google Scholar] [CrossRef]
- Lippert, S.; Nijhof, M.; Lippert, T.; Wilkes, D.; Gavrilov, A.; Heitmann, K.; Ruhnau, M.; von Estorff, O.; Schafke, A.; Schafer, I.; et al. COMPILE—A Generic Benchmark Case for Predictions of Marine Pile-Driving Noise. IEEE J. Ocean. Eng. 2016, 41, 1061–1071. [Google Scholar] [CrossRef]
- PACSYS: FEA/BEM Solutions. Available online: http://www.pafec.info/pafec/ (accessed on 11 June 2020).
- Westwood, E.K.; Tindle, C.T.; Chapman, N.R. A normal mode model for acousto-elastic ocean environments. J. Acoust. Soc. Am. 1996, 100, 3631–3645. [Google Scholar] [CrossRef]
- Heitmann, K.; Mallapur, S.; Lippert, T.; Ruhnau, M.; Lippert, S.; von Estorff, O. Numerical determination of equivalent damping parameters for a finite element model to predict the underwater noise due to offshore pile driving. Euronoise 2015, 2020, 605–610. [Google Scholar]
- Lippert, T.; von Estorff, O. The significance of parameter uncertainties for the prediction of offshore pile driving noise. J. Acoust. Soc. Am. 2014, 136, 2463–2471. [Google Scholar] [CrossRef]
- Nijhof, M.J.; Lippert, S.; Lippert, T. Compile II: A realistic benchmarking scenario for pile driving noise models. In Proceedings of the 25th International Congress on Sound and Vibration 2018: Hiroshima Calling, Hiroshima, Japan, 8–12 July 2018. [Google Scholar]
- Lippert, S.; Von Estorff, O.; Nijhof, M.J.; Lippert, T. COMPILE II—A benchmark of pile driving noise models against offshore measurements. In Proceedings of the INTER-NOISE 2018—47th International Congress and Exposition on Noise Control Engineering: Impact of Noise Control Engineering, Chicago, IL, USA, 26–29 August 2018. [Google Scholar]
- Von Pein, J.; Klages, E.; Lippert, S.; von Estorff, O. A hybrid model for the 3D computation of pile driving noise. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Meijers, P.C.; Tsouvalas, A.; Metrikine, A.V. The Effect of Stress Wave Dispersion on the Drivability Analysis of Large-Diameter Monopiles. Procedia Eng. 2017, 199, 2390–2395. [Google Scholar] [CrossRef]
- Park, J.; Seong, W.; Lee, K. Modeling of underwater noise from pile driving using coupled finite element and parabolic equation model with improved parabolic equation starting field. J. Acoust. Soc. Am. 2013, 134, 4114. [Google Scholar] [CrossRef]
- Weston, D.E. Intensity-range relations in oceanographic acoustics. J. Sound Vib. 1971, 18, 271–287. [Google Scholar] [CrossRef]
- Weston, D.E. Propagation in water with uniform sound velocity but variable-depth lossy bottom. J. Sound Vib. 1976, 47, 473–483. [Google Scholar] [CrossRef]
- Sertlek, H.O.; Ainslie, M.A.; Heaney, K.D. Analytical and Numerical Propagation Loss Predictions for Gradually Range-Dependent Isospeed Waveguides. IEEE J. Ocean. Eng. 2019, 44, 1240–1252. [Google Scholar] [CrossRef]
- Sertlek, H.O.; Ainslie, M.A. A depth-dependent formula for shallow water propagation. J. Acoust. Soc. Am. 2014, 136, 573–582. [Google Scholar] [CrossRef]
- Technical Committee: ISO/TC 43/SC 3 Underwater acoustics. In ISO 18406:2017-Underwater Acoustics—Measurement of Radiated Underwater Sound from Percussive Pile Driving; American National Standards Institute: Washington, DC, USA, 2017; p. 33.
- McCarthy, E. International Regulation of Underwater Sound: Establishing Rules and Standards to Address Ocean Noise Pollution; Solid Mechanics and Its Applications Series; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Nehls, G.; Betke, K.; Eckelmann, S.; Ros, M. Assessment and Costs of Potential Engineering Solutions for the Mitigation of the Impacts of Underwater Noise Arising from the Construction of Offshore Windfarms; COWRIE ENG-01-2007; BioConsult SH Report; COWRIE Ltd.: Husum, Germany, 2007; pp. 1–47. [Google Scholar]
- Koschinski, S.; Lüdemann, K. Development of Noise Mitigation Measures in Offshore Wind Farm Construction 2013; Technical Report; Federal Agency for Nature Conservation (Bundesamt für Naturschutz), BfN: Bonn, Germany, 2013.
- OSPAR Inventory of Measures to Mitigate the Emission and Environmental Impact of Underwater Noise; Technical Report; OSPAR Commission: London, UK, 2014.
- Verfuß, T. Noise mitigation systems and low-noise installation technologies. In Ecological Research at the Offshore Windfarm alpha ventus; Springer: Wiesbaden, Germany, 2014; pp. 181–191. [Google Scholar] [CrossRef]
- Van Rhijn, J.W. Reduction of Underwater Piling Noise: An Optimization of the Impact Force to Reduce Underwater Noise during the Installation of a Large Sized Monopole. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2017. [Google Scholar]
- Klages, E.; Pein, J.V.; von Estorff, O. Reducing offshore pile driving noise: Shape optimization of the impact hammer. In Proceedings of the 23rd International Congress and Exposition on Acoustics (ICA), Aachen, Germany, 9–13 September 2019; pp. 6231–6238. [Google Scholar]
- Perrow, M. Wildlife Wind Farms, Conflicts and Solutions: Offshore—Monitoring and Mitigation; Conservation Handbooks Series; Pelagic Publishing Limited: Exeter, UK, 2019. [Google Scholar]
- Metrikine, A.V.; Tsouvalas, A.; Segeren, M.L.; Elkadi, A.S.; Tehrani, F.S.; Gómez, S.S.; Atkinson, R.; Pisanó, F.; Kementzetzidis, E.; Tsetas, A.; et al. GDP: A new technology for Gentle Driving of (mono)Piles. In Proceedings of the 4th International Symposium on Frontiers in Offshore Geotechnics, Austin, TX, USA, 16–19 August 2020. [Google Scholar]
- Würsig, B.; Greene, C.R., Jr.; Jefferson, T. Development of an air bubble curtain to reduce underwater noise of percussive piling. Mar. Environ. Res. 2000, 49, 79–93. [Google Scholar] [CrossRef]
- Lucke, K.; Lepper, P.A.; Blanchet, M.A.; Siebert, U. The use of an air bubble curtain to reduce the received sound levels for harbor porpoises (Phocoena phocoena). J. Acoust. Soc. Am. 2011, 130, 3406–3412. [Google Scholar] [CrossRef]
- Rustemeier, J.; Griessmann, T.; Rolfes, R. Underwater sound mitigation of bubble curtains with different bubble size distributions. Proc. Meet. Acoust. 2012, 17, 779–784. [Google Scholar] [CrossRef]
- Jansen, H.W.; De Jong, C.A.; Jung, B.C. Experimental assessment of the insertion loss of an underwater noise mitigation screen for marine pile driving. In Proceedings of the 11th European Conference on Underwater Acoustics 2012 (ECUA 2012), Edinburgh, UK, 2–6 July 2012. [Google Scholar]
- Elmer, K.H. Efficient application of encapsulated bubbles and foam elements to mitigate offshore piling noise. J. Acoust. Soc. Am. 2013, 134, 4060. [Google Scholar] [CrossRef]
- Bruns, B.; Kuhn, C.; Stein, P.; Gattermann, J.; Elmer, K.H. The new noise mitigation system ‘Hydro Sound Dampers’: History of development with several hydro sound and vibration measurements. In Proceedings of the Inter-Noise 2014 Conference in Australia, Melbourne, Australia, 16–19 November 2014; pp. 1–9. [Google Scholar]
- Peng, Y.; Tsouvalas, A.; Metrikine, A.; Belderbos, E. Modelling and development of a resonator-based noise mitigation system for offshore pile driving. In Proceedings of the 25th International Congress on Sound and Vibration 2018 (ICSV 2018): Hiroshima Calling, Hiroshima, Japan, 8–12 July 2018; Volume 8, pp. 5070–5077. [Google Scholar]
- Elzinga, J.; Mesu, A.; van Eekelen, E.; Wochner, M.; Jansen, E.; Nijhof, M. Installing Offshore Wind Turbine Foundations Quieter: A Performance Overview of the First Full-Scale Demonstration of the AdBm Underwater Noise Abatement System. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 6–9 May 2019. [Google Scholar] [CrossRef]
- Verfuss, U.; Sinclair, R.; Sparling, C. A Review of Noise Abatement Systems for Offshore Wind Farm Construction Noise, and the Potential for Their Application in Scottish Waters; Technical Report No.1070; Scottish Natural Heritage Research: Inverness, UK, 2019. [Google Scholar]
- Novarini, J.; Keiffer, R.; Norton, G.V. A model for variations in the range and depth dependence of the sound speed and attenuation induced by bubble clouds under wind-driven sea surfaces. IEEE J. Ocean. Eng. 1998, 23, 423–438. [Google Scholar] [CrossRef]
- Bellmann, M. Overview of existing noise mitigation systems for reducing pile driving noise. In Proceedings of the International Congress and Exposition on Noise Control Engineering (INTER-NOISE), Melbourne, Australia, 16–19 November 2014; pp. 1–11. [Google Scholar]
- Morse, P.; Ingard, K. Theoretical Acoustics; International Series in Pure and Applied Physics; Princeton University Press: Princeton, NJ, USA, 1968. [Google Scholar]
- Hall, M.V. A comprehensive model of wind generated bubbles in the ocean and predictions of the effects on sound propagation at frequencies up to 40 kHz. J. Acoust. Soc. Am. 1989, 86, 1103–1117. [Google Scholar] [CrossRef]
- Tsouvalas, A.; Metrikine, A. Noise reduction by the application of an air bubble curtain in offshore pile driving. J. Sound Vib. 2016, 371, 150–170. [Google Scholar] [CrossRef]
- Oestman, R.; Buehler, D.; Reyff, J.; Rodkin, R. Technical Guidance for Assessment and Mitigation of the Hydroacoustic Effects of Pile Driving on Fish; Technical Report; California Department of Transportation: Sacramento, CA, USA, 2009.
- ITAP. Offshore Messkampagne 1 (OMK 1) für das Projekt BORA im Windpark BARD Offshore 1; Technical Report; Institüt für Technische und Angewandte Physik GmbH: Oldenburg, Germany, 2013. [Google Scholar]
- Kastelein, R.A.; von Benda-Beckmann, A.M.; Lam, F.P.A.; Jansen, E.; de Jong, C.A. Effect of a bubble screen on the behavioral responses of captive harbor porpoises (Phocoena phocoena) exposed to airgun sounds. Aquat. Mamm. 2019, 45, 706–716. [Google Scholar] [CrossRef]
- Wehner, D.; Landrø, M. The impact of bubble curtains on seismic air-gun signatures and its high-frequency emission. Geophysics 2020, 85, P1–P11. [Google Scholar] [CrossRef]
- Göttsche, K. Numerical prediction of underwater noise reduction during offshore pile driving by a Small Bubble Curtain. In Proceedings of the International Congress and Exposition on Noise Control Engineering (INTER-NOISE), Innsbruck, Austria, 15–18 September 2013; pp. 1–10. [Google Scholar]
- Bohne, T.; Griessmann, T.; Rolfes, R. Integral approach for modelling offshore bubble curtains. In Proceedings of the International Congress and Exposition on Noise Control Engineering (INTER-NOISE), Hamburg, Germany, 21–24 August 2016; pp. 4058–4063. [Google Scholar]
- Bohne, T.; Griessmann, T.; Rolfes, R. Modeling the noise mitigation of a bubble curtain. J. Acoust. Soc. Am. 2019, 146, 2212–2223. [Google Scholar] [CrossRef]
- Tsouvalas, A.; Metrikine, A.V. Parametric study of noise reduction by an air bubble curtain in offshore pile driving. In Proceedings of the ICSV 2016—23rd International Congress on Sound and Vibration: From Ancient to Modern Acoustics, Athens, Greece, 10–14 July 2016. [Google Scholar]
- Elmer, K.H.; Savery, J. New Hydro Sound Dampers to reduce piling underwater noise. In Proceedings of the Inter-Noise 2014 Conference in Australia, Melbourne, Australia, 16–19 November 2014; pp. 1–10. [Google Scholar]
- Buckingham, M.J. Theory of acoustic attenuation, dispersion, and pulse propagation in unconsolidated granular materials including marine sediments. J. Acoust. Soc. Am. 1997, 102, 2579–2596. [Google Scholar] [CrossRef]
- Buckingham, M.J. Wave propagation, stress relaxation, and grain-to-grain shearing in saturated, unconsolidated marine sediments. J. Acoust. Soc. Am. 2000, 108, 2796–2815. [Google Scholar] [CrossRef]
- Buckingham, M.J. Compressional and shear wave properties of marine sediments: Comparisons between theory and data. J. Acoust. Soc. Am. 2005, 117, 137–152. [Google Scholar] [CrossRef]
- Biot, M.A. Theory of Propagation of Elastic Waves in a Fluid Saturated Porous Solid: I. Low Frequency Range. J. Acoust. Soc. Am. 1956, 28, 168–178. [Google Scholar] [CrossRef]
- Biot, M.A. Theory of Propagation of Elastic Waves in a Fluid Saturated Porous Solid: II. Higher Frequency Range. J. Acoust. Soc. Am. 1956, 28, 179–191. [Google Scholar] [CrossRef]
- Biot, M.A. Mechanics of Deformation and Acoustic Propagation in Porous Media. J. Appl. Phys. 1962, 33, 1482–1498. [Google Scholar] [CrossRef]
- Biot, M.A. Generalized Theory of Acoustic Propagation in Porous Dissipative Media. J. Acoust. Soc. Am. 1962, 34, 1254–1264. [Google Scholar] [CrossRef]
- Wilkes, D.R.; Gavrilov, A.N. Sound radiation from impact-driven raked piles. J. Acoust. Soc. Am. 2017, 142, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Amaral, J.L.; Miller, J.H.; Potty, G.R.; Vigness-Raposa, K.J.; Frankel, A.S.; Lin, Y.T.; Newhall, A.E.; Wilkes, D.R.; Gavrilov, A.N. Characterization of impact pile driving signals during installation of offshore wind turbine foundations. J. Acoust. Soc. Am. 2020, 147, 2323–2333. [Google Scholar] [CrossRef] [PubMed]
- Lippert, S.; Ruhnau, M.; Heitmann, K.; Lippert, T.; Von Estorff, O.; Nijhof, M. COMPILE—An international benchmark study on the prediction of offshore pile driving noise. In Proceedings of the Forum Acusticum, Krakow, Poland, 7–12 September 2014. [Google Scholar]
- Hamilton, E.L. Geoacoustic modeling of the sea floor. J. Acoust. Soc. Am. 1980, 68, 1313–1340. [Google Scholar] [CrossRef]
- Van Dalen, K. Multi-Component Acoustic Characterization of Porous Media; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Blacquière, G.; Sertlek, H.O. Modeling the effects of a dynamic rough sea surface. In SEG Technical Program Expanded Abstracts 2018; Society of Exploration Geophysicists: Houston, TX, USA, 2018; pp. 3838–3842. [Google Scholar] [CrossRef]
- Blacquière, G.; Sertlek, H.O. Modeling and assessing the effects of the sea surface, from being flat to being rough and dynamic. Geophysics 2019, 84, T13–T27. [Google Scholar] [CrossRef]
- Sertlek, H.O.; Blacquière, G. Effects of the Rough Sea Surface on the Signature of a Single Air Gun. IEEE J. Ocean. Eng. 2019, 44, 575–581. [Google Scholar] [CrossRef]
- Kohlsche, T.; Lippert, S.; von Estorff, O. Gaussian process based surrogate modelling of acoustic systems. PAMM 2019, 19, e201900471. [Google Scholar] [CrossRef]
- Van den Bos, L.; Koren, B.; Dwight, R. Non-intrusive uncertainty quantification using reduced cubature rules. J. Comput. Phys. 2017, 332, 418–445. [Google Scholar] [CrossRef]
- Van den Bos, L.; Sanderse, B.; Blonk, L.; Bierbooms, W.; van Bussel, G. Efficient ultimate load estimation for offshore wind turbines using interpolating surrogate models. J. Phys. Conf. Ser 2018, 1037, 062017. [Google Scholar] [CrossRef]
- Van den Bos, L.; Sanderse, B.; Bierbooms, W.; van Bussel, G. Bayesian model calibration with interpolating polynomials based on adaptively weighted Leja nodes. Commun. Comput. Phys. 2019, 27, 33–69. [Google Scholar] [CrossRef]
- Van den Bos, L. Quadrature Methods for Wind Turbine Load Calculations. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2020. [Google Scholar]
- Weston, D.E. Acoustic flux methods for oceanic guided waves. J. Acoust. Soc. Am. 1980, 68, 287–296. [Google Scholar] [CrossRef]
- Sertlek, H. Aria of the Dutch North Sea: Propagation, Source and Sound Mapping Simulations for the Dutch North Sea. Ph.D. Thesis, Leiden University, Leiden, The Netherlands, 2016. [Google Scholar]
- Fritsch, M. Zur Modellbildung der Wellenausbreitung in Dynamisch Belasteten Pfählen (about the Modelling of Wave Propagation in Dynamically Loaded Piles). Ph.D. Thesis, Technische Universität Braunschweig, Braunschweig, Germany, 2008. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Modelling Approach | Remarks |
|---|---|---|
| CMST | Close-range: PACSYS [152] Long-range: ORCA [153] | •Axisymmetric model. •Seabed modelled as fluid. •Extension to full 3D possible in the long-range module. |
| TUHH | Close-range: ABAQUS [154] Long-range: WI algorithm [94,158] | •Axisymmetric model. •Close-range module includes elasticity of the seabed. • Range- and angular-dependent environments can be included within the all-fluid model approximation in the long-range module. |
| JASCO | Close-range: FDTD [100] Long-range: WI algorithm | • Axisymmetric model. • Seabed modelled as fluid. • Simplification of the shell theory with no bending energy stored in the shell surface. |
| SNU | Close-range: FE model [160] Long-range: PE model [84] | • Axisymmetric model. • Seabed modelled as fluid. • Range- and angular-dependent environments can be included within the all-fluid model approximation in the long-range module. |
| UoS/NPL | Close-range: FE model Long-range: BE model [123] | • Axisymmetric model. • Seabed modelled as fluid. |
| AQUARIUS (TNO) | Close-range: FE model [101]; Long-range: NM model [95,101] | • Axisymmetric model. • 3D effects in terms of range-dependent environments through the adoption of adiabatic theory for the normal modes within the all-fluid model approximation in the long-range module. |
| SILENCE (TUD) | Close-range: Semi-analytical model [140] (Section 3.3.1) Long-range: Boundary element (BE) model [115] (Section 3.3.2) | • Axisymmetric model including a layered elastic seabed description at both close- and long-range modules. • Range-dependency can be covered within the all-fluid model approximation in the long-range module [163,164]. • Modelling of the air bubble curtain (Section 5.1.1) within the all-fluid model approximation. |
| F&R (LUH) | Close-range: 1D driveability model to generate hammer force [135] and FE model to generate the sound field [120] Long-range: PE model [84] | • Axisymmetric model. • Close-range module includes elasticity of the seabed. • 3D effects in terms of varying bathymetry can be included within the all-fluid model approximation in the long-range module. |
| Parameter | Pile | Parameter | Fluid | Upper Soil Layer | Bottom Soil Layer |
|---|---|---|---|---|---|
| Length [m] | 85 | Depth [m] | 40 | 2 | ∞ |
| Density [kg/m3] | 7850 | [kg/m3] | 1000 | 1888 | 1908 |
| Outer diameter [m] | 3.35 | [m/s] | 1500 | 1705 | 1725 |
| Wall thickness [mm] | 70 | [m/s] | - | 186 | 370 |
| Final penetration depth [m] | 20 | [ dB/] | - | 0.91 | 0.88 |
| Maximum Blow Energy [kJ] | 1370 | [ dB/] | - | 1.86 | 2.77 |
| Mitigation System | Principal Mechanism of Noise Reduction | Number of Piles | ΔSEL |
|---|---|---|---|
| Big Bubble Curtain | Impedance mismatch between the water and the bubbly medium. Noise reduction depends upon the supplied air–volume, size of the air bubbles, successful encirclement of the radiating source and thickness of the bubble screen, single or double BBC. | >1000 | ∼13 for the single BBC and ∼17 for the double BBC |
| Noise Mitigation Screen | Shielding effect around the pile, reflection and absorption of the energy. Noise reduction depends upon the space between the inner and the outer wall, the distance between the pile and the inner screen, the isolation of the outer wall from the ground vibrations, the additional presence of a BBC around the screen. | >400 | ∼12 without the BBC and ∼17 with the BBC |
| Hydro-Sound Dampers | Scattering and absorption of the energy from the resonating bubbles and reflection of sound at the HSD-net/water interface. Noise reduction depends upon the number, the size and the configuration of the air balloons and PE-foam elements of the system. The system can be tuned to absorb acoustic energy at certain frequency bandwidths. | >250 | ∼15 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsouvalas, A. Underwater Noise Emission Due to Offshore Pile Installation: A Review. Energies 2020, 13, 3037. https://doi.org/10.3390/en13123037
Tsouvalas A. Underwater Noise Emission Due to Offshore Pile Installation: A Review. Energies. 2020; 13(12):3037. https://doi.org/10.3390/en13123037
Chicago/Turabian StyleTsouvalas, Apostolos. 2020. "Underwater Noise Emission Due to Offshore Pile Installation: A Review" Energies 13, no. 12: 3037. https://doi.org/10.3390/en13123037
APA StyleTsouvalas, A. (2020). Underwater Noise Emission Due to Offshore Pile Installation: A Review. Energies, 13(12), 3037. https://doi.org/10.3390/en13123037