Overview of Human Walking Induced Energy Harvesting Technologies and Its Possibility for Walking Robotics


Abstract
1. Introduction
- (i)
- Research motivations have been confined to the supply power for portable, wearable, or even implanted electronic devices. In consideration of the long-term vision and more extensive application, the wearable frames that assist humans to move and take steps have the potential for energy regeneration, such as a gait orthotic system and exoskeleton [24,25].
- (ii)
- Harvested energy tends to suffer from insufficient output power. The energy produced by foot strike is in large quantity. So, how to find a more effective energy conversion and management way is a challenging subject, regarding the interdisciplinary knowledge of mechanical design, materials, circuit, power transmission, and control, etc.
- (iii)
- Storage and arrangement of captured energy is as important as energy conversion to achieve effective recovery. Various batteries are easy to access for commercial use, irrespective of limited capacity and energy efficiency, so no special effort has been made on this topic [26]. Electricity generation is a very convenient way to transfer energy, but it is difficult to store in quantities to meet the diversity of customer demand [27].
2. Human Walking Induced Energy Conversion
2.1. Smart Materials Based Harvester
2.1.1. Piezoelectric Materials
2.1.2. Other Smart Materials
2.2. Electromagnetic Induction Generator
2.2.1. Traditional Generator
2.2.2. Generator with Liquid Metal
2.3. Triboelectric Generator
2.4. Electrostatic Energy Conversion
3. Human Walking Induced Energy Storage
3.1. Considerations for Energy Storage
3.2. Frequently Adopted Energy Storage Methods
4. Challenges and Possible Solutions
4.1. Limitations of Current Energy Harvest Techniques
4.1.1. Energy Conversion
4.1.2. Energy Storage
4.1.3. Use of Regenerative Energy
4.2. Potential Solutions
4.2.1. Improving Energy Efficiency
- ➢
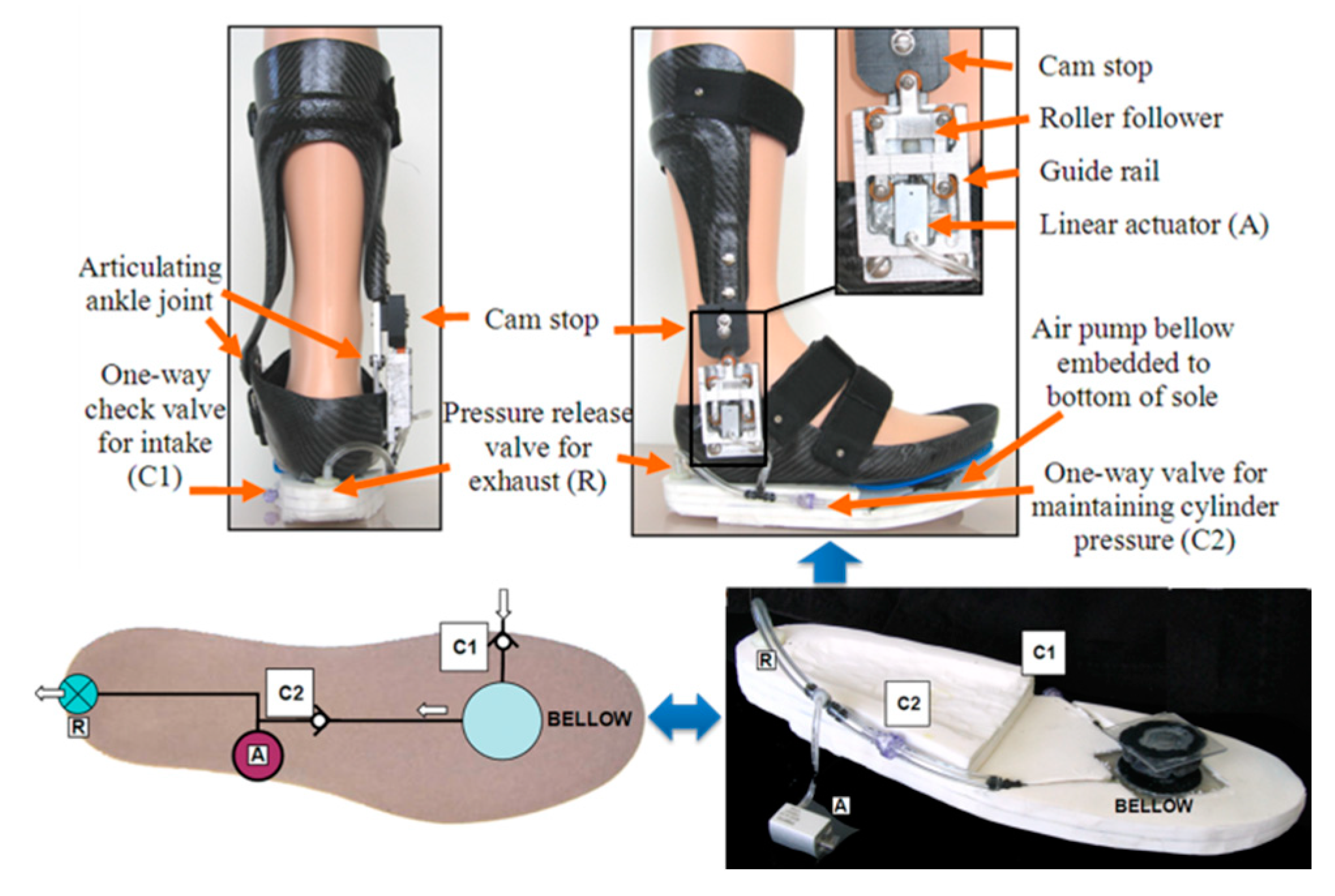
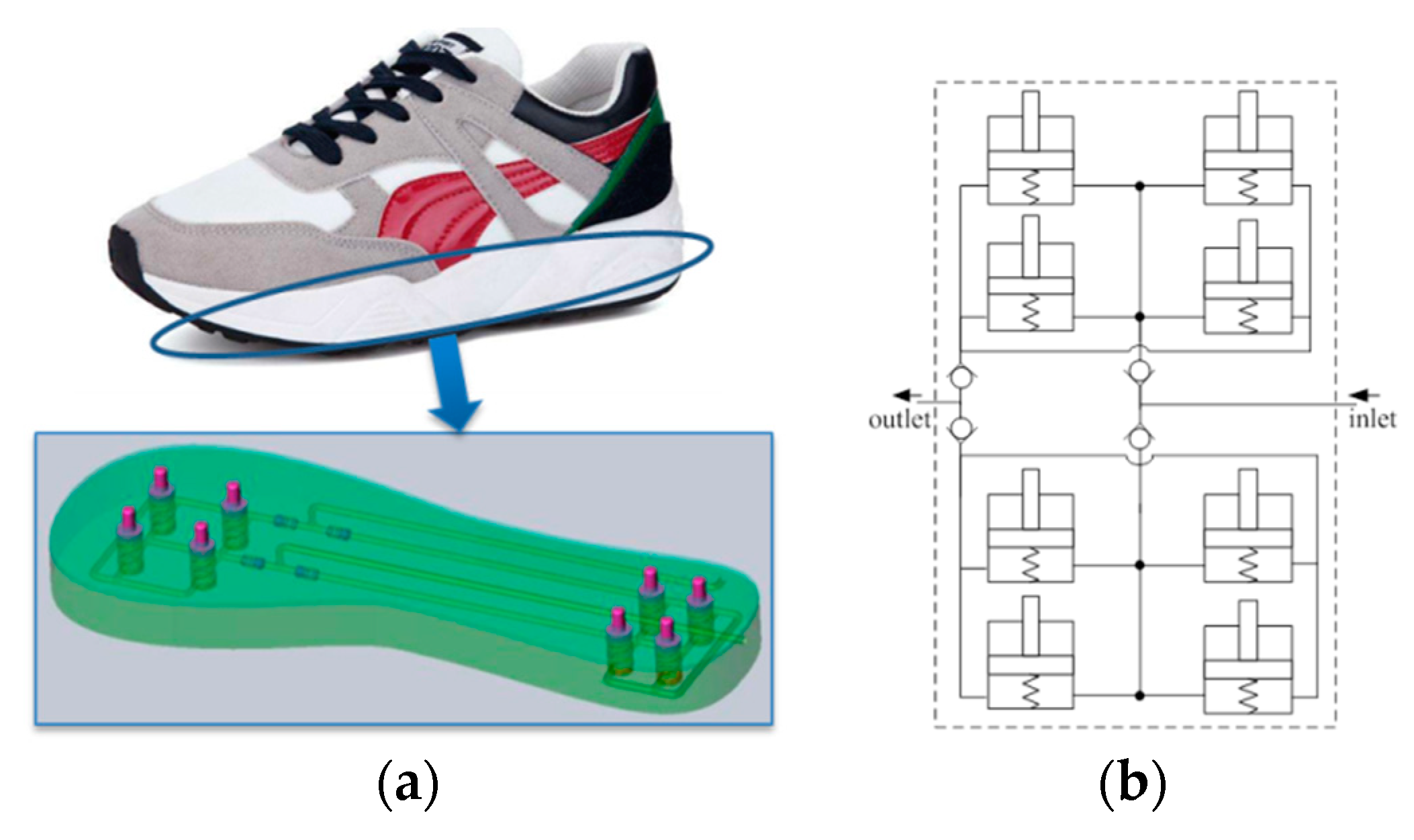
- Energy conversionWith the development of fabrication technology of hydraulic components and systems in the micro scale, robots driven by micro hydraulic actuators have emerged in the past few years, featured by compact structure and higher power to weight ratio [120,121]. Such micro hydraulic systems with excellent drive performance provide a promising solution for the wearable robotic equipment like an exoskeleton. For instance, a hydraulic energy harvester can be designed and embedded into the insole with reference to the other harvesters reviewed above. As shown in Figure 13, the harvester works based on the principle of a volumetric pump and supplies high pressure fluid when the foot is applying downward forces. The walking induced energy is regenerated by high pressure fluid, and then the energy conversion is achieved. As for component fabrication, additive manufacturing has been employed to make the integrated hydraulic actuation system for a legged robot and has proven its significant performance in constructing compact and lightweight drive units [122,123].
- ➢
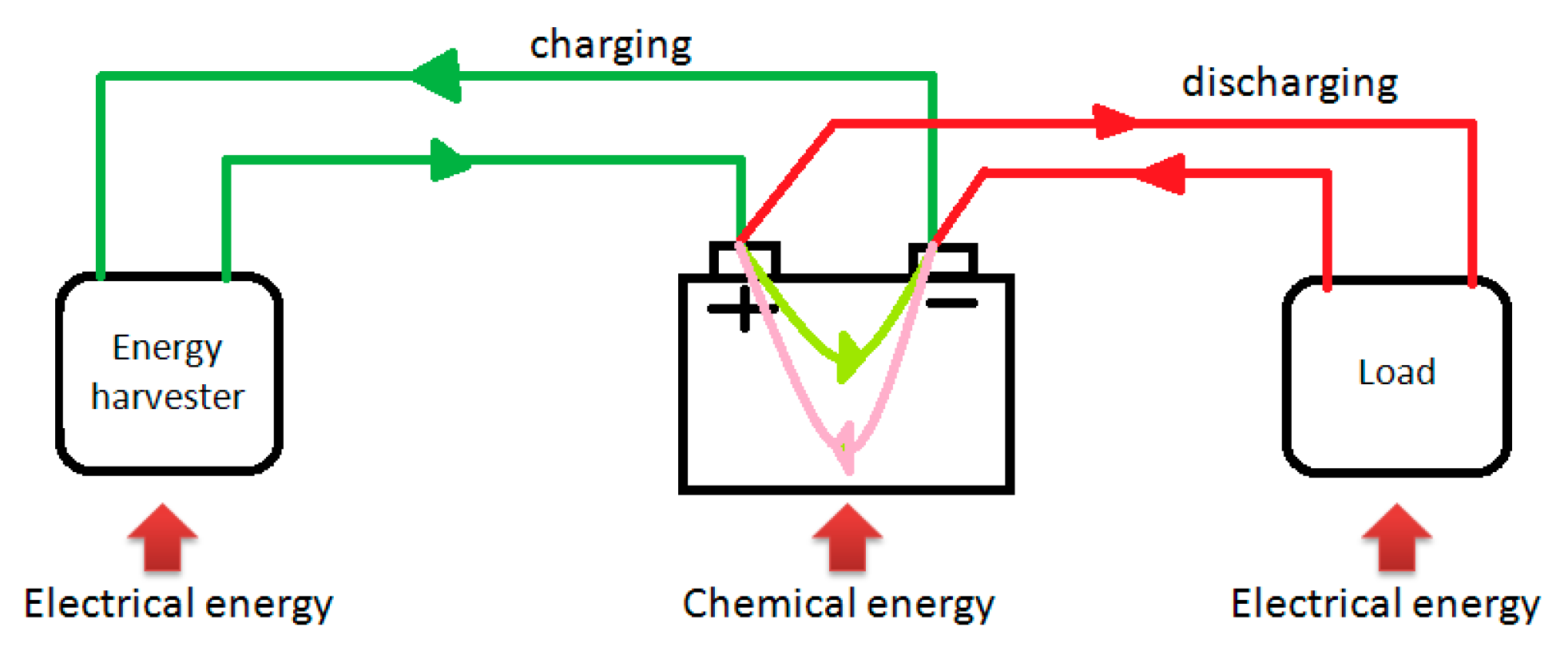
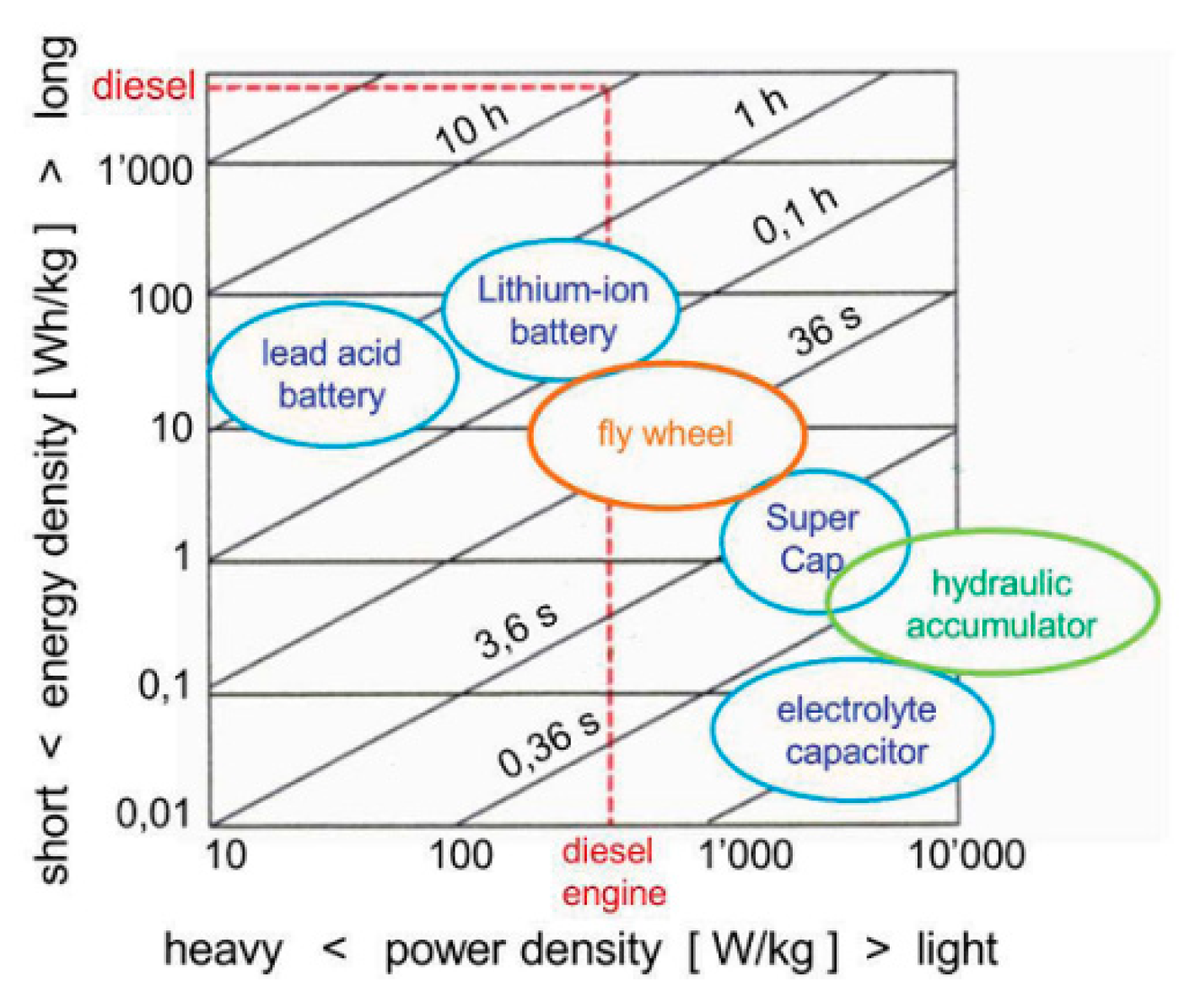
- Energy storageEnergy storage is complicated in an electrical system, and it takes a long time to charge the battery. The electric signal transmitted during the energy conversion process has to suffer from rectification before electric energy storage [124]. The hydraulic power system, by contrast, is characterized by the combination of energy conversion and storage with an accumulator to realize easily. Furthermore, the consistent use of regenerative energy is particularly significant to the efficiency improvement. Hence, compact and powerful energy storage devices are required at any time. Comparisons of electrical, mechanical, and hydraulic energy storage devices illustrated in Figure 14 show that the classical hydraulic accumulator has very good superiority [125]. The energy efficiency of hydraulic drives has increased dramatically over the past decades, taking advantage of its easily implemented energy regeneration [126,127]. Similar to the bulky frame of the battery, the fluid energy storage device is usually not a lightweight component. It is critical, especially for mobile application, and should be improved by reducing the weight. With the emerging new material and the advanced manufacturing technology, such components with a mass reduction of more than 50% compared to the metallic structure have been reported [128]. This achievement is very exciting for the current fluid power system and makes it possible to expand the application scope of the fluid energy storage device.
- ➢
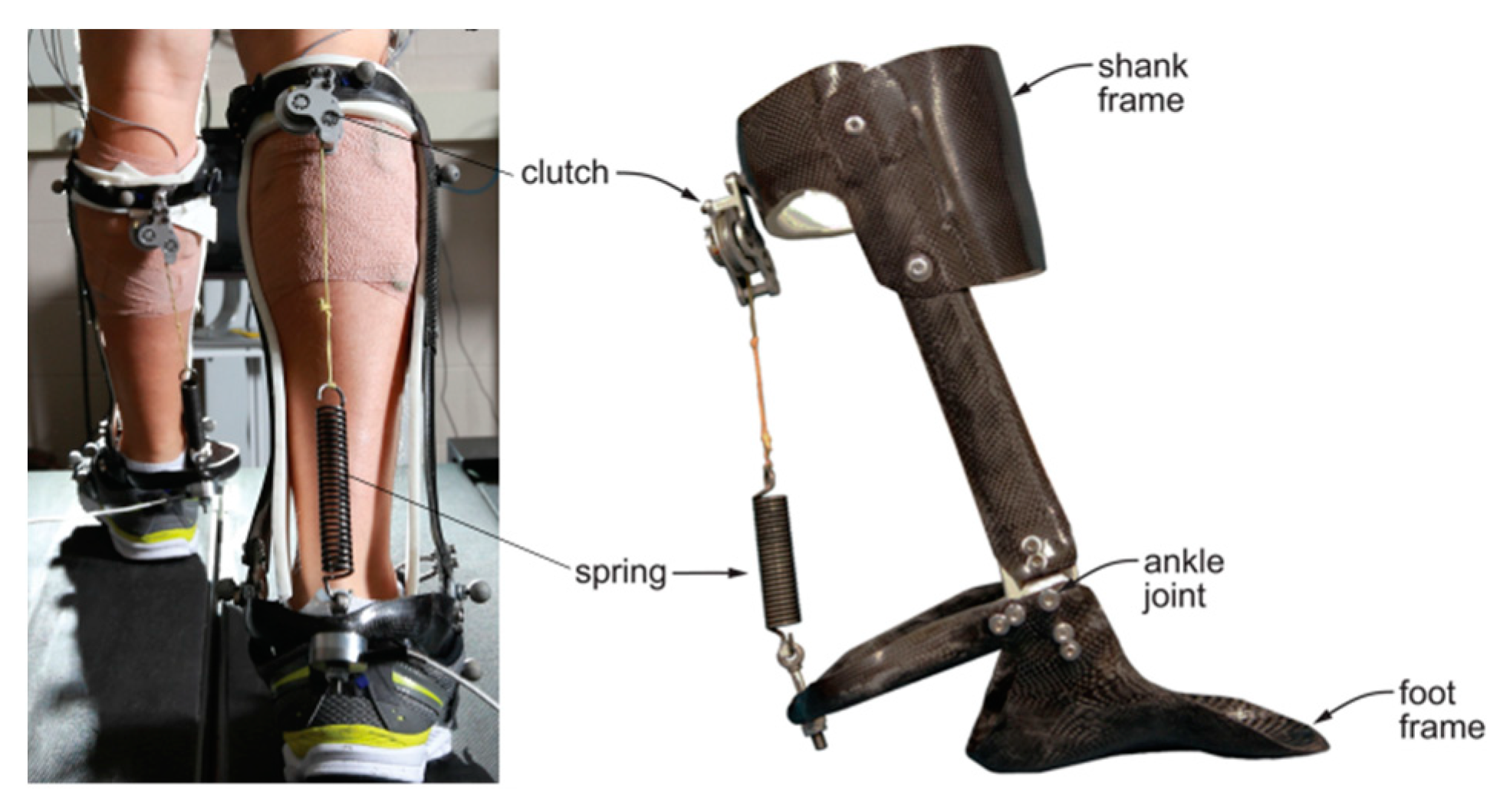
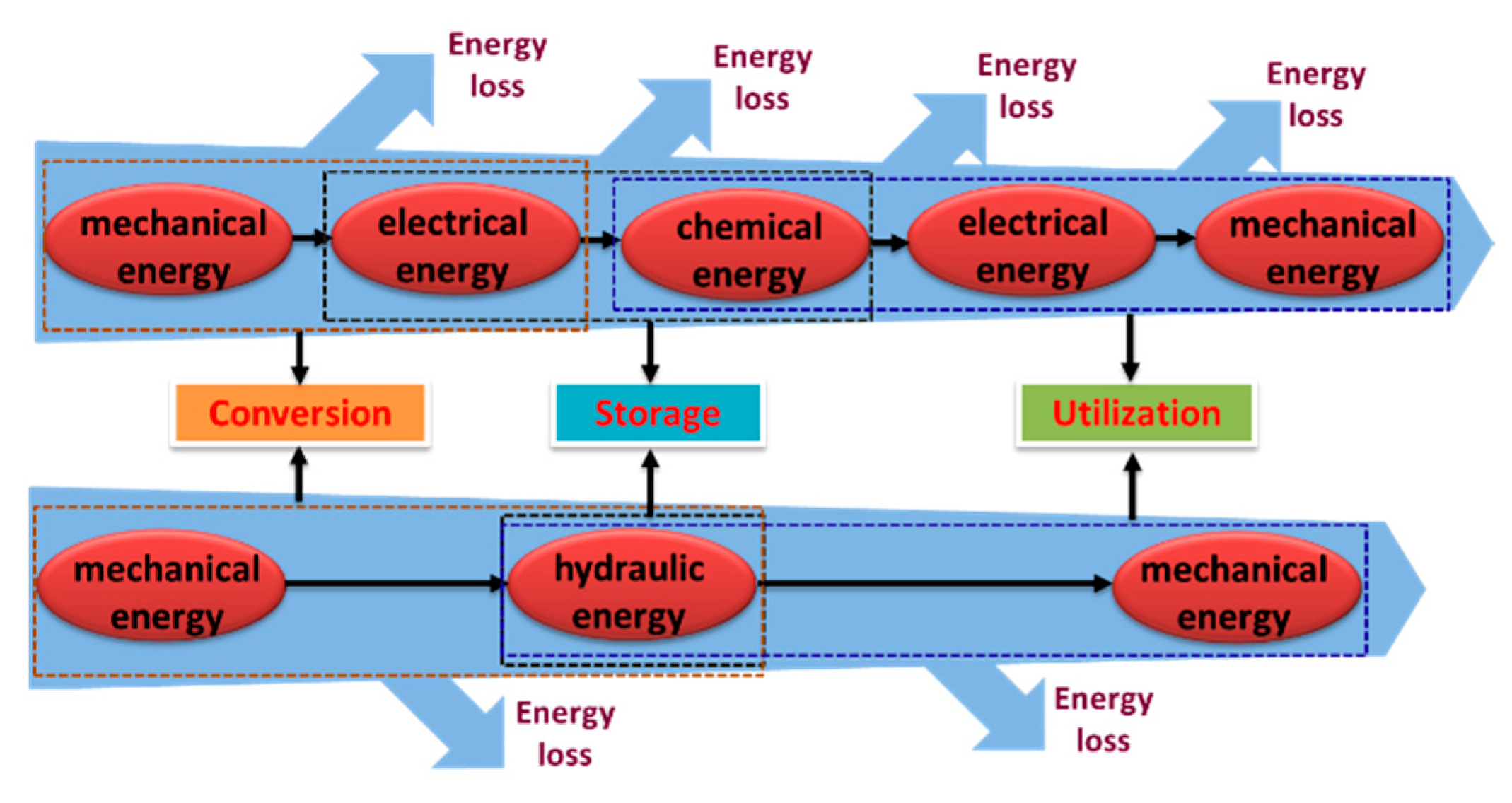
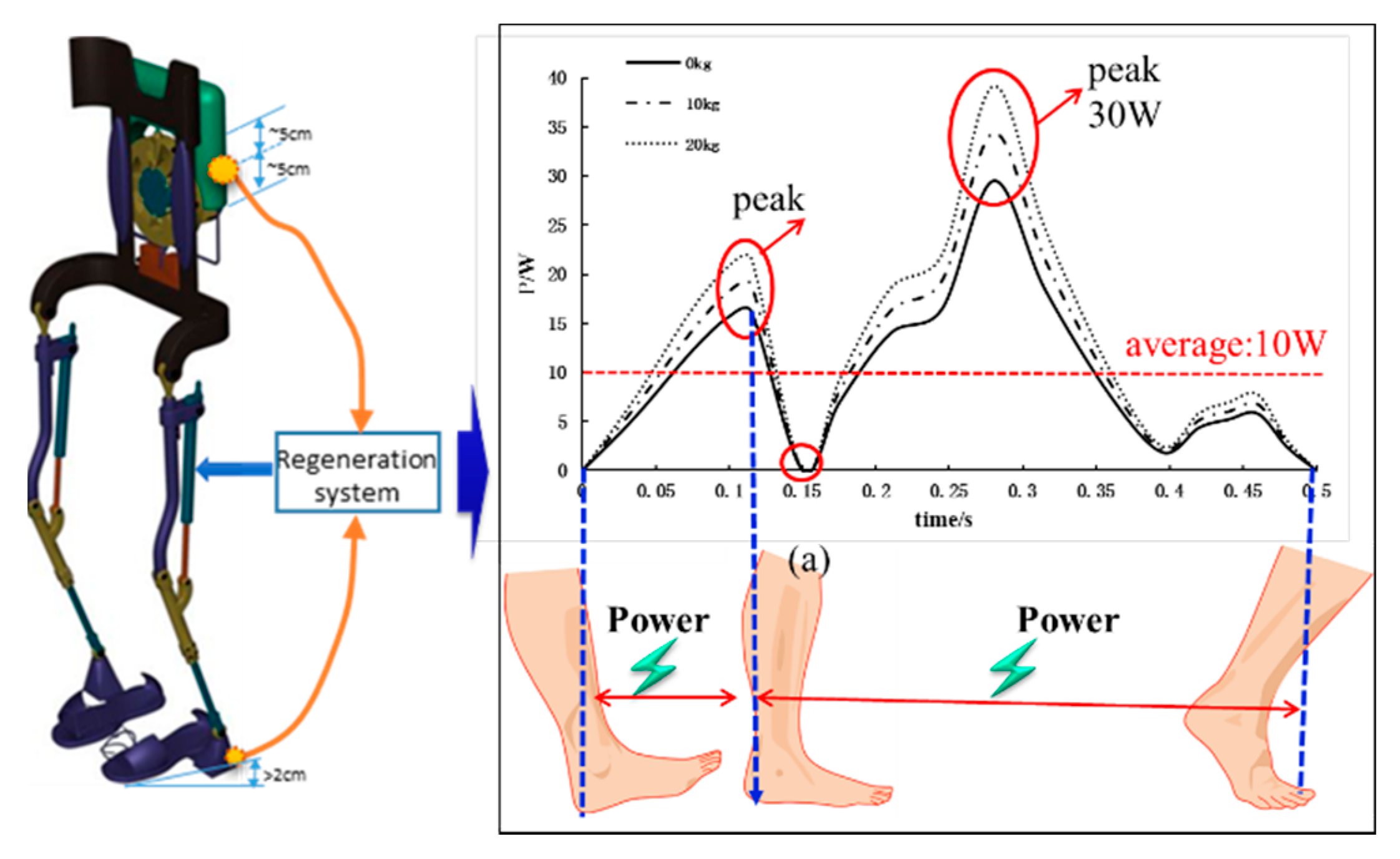
- Energy utilizationSince hydraulic energy can be converted into mechanical energy and perform work directly, the energy regulation and distribution has more flexibility when applied in the energy harvesting system. Consequently, the exoskeleton robot system for human power assistance driven by hydraulic actuators still owns a large share in the field applications, sharing the market together with electric drives, especially dedicated for the lower limb assistance or prosthesis, which usually consumes more power [129,130,131]. Taking advantage of relatively simple energy conversion and storage procedures, a hydraulic drive system with energy regeneration design could be more attractive in practice and rightly cover the shortage results from energy efficiency in most cases [132]. It is indicated that a great quantity of energy can even be regenerated and feedback to the hydraulic drive system of a wearable lower extremity, focusing on the walking induced energy merely by foot strike [133]. As illustrated in Figure 15, it definitely benefits from the shorter energy transfer chain than the electric system. With a properly designed accumulator, it can not only store hydraulic energy in high density but also absorb shocks brought about by frequent foot strike and lift movements.
4.2.2. Maximizing the Captured Power
5. Prospects
6. Conclusions
- (1)
- Human walking induced energy can be produced in great quantity and it is possible to be captured. The energy caused by the walking motion may either result from body vibration or exist as inertial energy of moving limbs, or even do work by interactions between foot and ground. It is of great significance to exploit the human walking action that keeps generating mechanical energy continually.
- (2)
- Various parasitic harvesters have been made with smart materials and different types of generators based on electromagnetic induction, triboelectric effect, or electrostatic effect. However, from the aspect of energy saving of drive and mechatronic systems aiming at doing work rather than merely lighting LEDs, conversion from kinetic into electric energy involves a complicated process to some extent and vice versa. Further, electric signals have to be rectified, together with relatively complex procedures of energy storage and utilization, the overall energy efficiency of the harvesting system gets low and it cannot reach the expectations.
- (3)
- Energy harvesting on the walking and wearable robotics seems more promising in efficiency. Converting mechanical energy into fluid power could be more direct with less energy loss. Under the circumstance, energy conversion, storage, and utilization can be realized easily within an integrated system. It is appropriate for the artificial exoskeleton to achieve power augmentation or assisting rehabilitation of lower limb because these robotic devices perform walking motions simultaneously. Such applications are expected to increase the duration of robots with batteries of certain capacity as the power supply or reduce the installed power and volume of the drive unit effectively.
Author Contributions
Funding
Conflicts of Interest
References
- Mateu, L.; Moll, F. Review of energy harvesting techniques and applications for microelectronics. Microtechnol. New Millenn. 2005, 359–373. [Google Scholar]
- Starner, T. Human-powered wearable computing. IBM Syst. J. 1996, 35, 618–629. [Google Scholar] [CrossRef]
- Niu, P.; Chapman, P.; Riemer, R. Evaluation of motions and actuation methods for biomechanical energy harvesting. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference, Aachen, Germany, 20–25 June 2004; pp. 2100–2106. [Google Scholar]
- Guo, Y.; Zhang, Q.; Li, Y.; Wang, H. Progress of the research on wearable triboelectric nanogenerator. Mater. China 2016, 35, 91–100. [Google Scholar]
- Hansen, B.J.; Liu, Y.; Yang, R. Hybrid nanogenerator for concurrently harvesting biomechanical and biochemical energy. ACS Nano 2010, 4, 3647–3652. [Google Scholar] [CrossRef] [PubMed]
- Leonov, V. Thermoelectric energy harvesting of human body heat for wearable sensors. IEEE Sens. J. 2013, 13, 2284–2291. [Google Scholar] [CrossRef]
- Hyland, M.; Hunter, H.; Liu, J.; Veety, E. Wearable thermoelectric generators for human body heat harvesting. Appl. Energy 2016, 182, 518–524. [Google Scholar] [CrossRef]
- Kim, M.; Lee, S.; Kim, C.; Kim, Y. Wearable thermoelectric generator for harvesting human body heat energy. Smart Mater. Struct. 2014, 23, 105002. [Google Scholar] [CrossRef]
- Weber, J.; Potje-Kamloth, K.; Haase, F. Coin-size coiled-up polymer foil thermoelectric power generator for wearable electronics. Sens. Actuators A Phys. 2006, 132, 325–330. [Google Scholar] [CrossRef]
- Xie, L.; Du, R. Design and analysis of a mechanical device to harvest energy from human footstep motion. Chin. J. Mech. Eng. 2011, 24, 738–743. [Google Scholar] [CrossRef]
- Fu, H.; Xu, R.; Seto, K. Energy Harvesting from Human Motion Using Footstep-Induced Airflow. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2015; p. 012060. [Google Scholar]
- Choi, Y.M.; Lee, M.G.; Jeon, Y. Wearable biomechanical energy harvesting technologies. Energies 2017, 10, 1483. [Google Scholar] [CrossRef]
- Anton, S.R.; Sodano, H.A. A review of power harvesting using piezoelectric materials 2003–2006. Smart Mater. Struct. 2007, 16, R1–R21. [Google Scholar] [CrossRef]
- Jung, W.S.; Lee, M.; Kang, M. Powerful curved piezoelectric generator for wearable applications. Nano Energy 2015, 13, 174–181. [Google Scholar] [CrossRef]
- Vineesh, K.; Amarnath, K.T.; Lavanya, M.; Priya, R.A. Review on foot step power generation by piezoelectric transducer. Int. J. Appl. Eng. Res. 2015, 10, 3814–3816. [Google Scholar]
- Li, Z.; Y., Z.; Naguib, H.E.; Zu, J. Design and studies on a low-frequency truss-based compressive-mode piezoelectric energy harvester. IEEE Trans. Mech. 2018, 23, 2849–2858. [Google Scholar] [CrossRef]
- Huang, H.; Merrett, G.V.; Metcalf, C.D.; White, N.M. A feasibility study on body-worn inertial energy harvesting during walking and running. Energy Harvest. 2011, 2, 272973. [Google Scholar]
- Kuo, A.D. Harvesting energy by improving the economy human walking. Science 2005, 309, 1686–1687. [Google Scholar] [CrossRef]
- Yang, W.; Chen, J.; Zhu, G.; Yang, J. Harvesting energy from the natural vibration of human walking. ACS Nano 2013, 7, 11317–11324. [Google Scholar] [CrossRef]
- Galhardi, M.A.; Guilherme, T.H.; Junior, V.L. A review of power harvesting on mechanical vibration using piezoelectric materials and applications. In Proceedings of the 7th Brazilian Conference on Dynamics, Control and Applications, São Paulo, Brazil, 7–9 May 2008. [Google Scholar]
- Rao, Y.; McEachern, K.M.; Arnold, D.P. A compact human-powered energy harvesting system. Energy Harvest. Syst. 2013, 1, 89–100. [Google Scholar] [CrossRef]
- Bai, P.; Zhu, G.; Lin, Z.; Jing, Q. Integrated multilayered triboelectric nanogenerator for harvesting biomechanical energy from human motions. ACS Nano 2013, 7, 3713–3719. [Google Scholar] [CrossRef]
- Yi, F.; Lin, L.; Niu, S.; Yang, P.K. Stretchable-rubber-based triboelectric nanogenerator and its application as self-powered body motion sensors. Adv. Funct. Mater. 2015, 25, 3688–3696. [Google Scholar] [CrossRef]
- Shorter, K.A.; Xia, J.; Hsiao-Wecksler, E.T. Technologies for powered ankle-foot orthotic systems: Possibilities and challenges. IEEE/ASME Trans. Mech. 2013, 18, 337–347. [Google Scholar] [CrossRef]
- Zoss, A.B.; Kazerooni, H.; Chu, A. Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX). IEEE/ASME Trans. Mech. 2006, 11, 128–138. [Google Scholar] [CrossRef]
- Zhu, W.H.; Zhu, Y.; Davis, Z. Energy efficiency and capacity retention of Ni-MH batteries for storage applications. Appl. Energy 2013, 106, 307–313. [Google Scholar] [CrossRef]
- Luo, X.; Wang, J.; Dooner, M.; Clarke, J. Overview of current development in electrical energy storage technologies and the application potential in power system operation. Appl. Energy 2015, 37, 511–536. [Google Scholar] [CrossRef]
- Liu, H.; Zhong, J.; Lee, C.; Lee, S.W.; Lin, L. A comprehensive review on piezoelectric energy harvesting technology: Materials, mechanisms, and applications. Appl. Phys. Rev. 2018, 5, 041306. [Google Scholar] [CrossRef]
- Zhao, J.; You, Z. A shoe-embedded piezoelectric energy harvester for wearable sensors. Sensors 2014, 14, 12497–12510. [Google Scholar] [CrossRef]
- Xie, L.; Cai, M. Increased piezoelectric energy harvesting from human footstep motion by using an amplification mechanism. Appl. Phys. Lett. 2014, 105, 143901. [Google Scholar] [CrossRef]
- Kymissis, J.; Kendall, C.; Paradiso, J.; Gershenfeld, N. Parasitic power harvesting in shoes. In Proceedings of the Digest of Papers. Second International Symposium on Wearable Computers, Pittsburgh, PA, USA, 19–20 Octorber 1998; pp. 132–139. [Google Scholar]
- Beeby, S.P.; Tudor, M.J.; White, N.M. Energy harvesting vibration sources for microsystems applications. Meas. Sci. Tech. 2016, 17, R175–R195. [Google Scholar] [CrossRef]
- Ahmed, R.; Mir, F.; Banerjee, S. A review on energy harvesting approaches for renewable energies from ambient vibrations and acoustic waves using piezoelectricity. Smart Mat. Struct. 2017, 26, 085031. [Google Scholar] [CrossRef]
- Bian, Y.; Yang, C. A review of current research for energy harvesting based on vibration of piezoelectric materials. Piezoelectr. Acousto Opt. 2011, 33, 612–622. [Google Scholar]
- Kim, H.S.; Kim, J.H.; Kim, J. A review of piezoelectric energy harvesting based on vibration. Int. J. Precis. Eng. Manuf. 2001, 12, 1129–1141. [Google Scholar] [CrossRef]
- Sodano, H.A.; Inman, D.J. A review of power harvesting from vibration using piezoelectric materials. Shock Vib. Dig. 2004, 36, 197–205. [Google Scholar] [CrossRef]
- Granstrom, J.; Feenstra, J.; Sodano, H.A.; Farinholt, K. Energy harvesting from a backpack instrumented with piezoelectric shoulder straps. Smart Mater. Struct. 2007, 16, 1810–1820. [Google Scholar] [CrossRef]
- Pillatsch, P.; Yeatman, E.M.; Holmes, A.S. Real world testing of a piezoelectric rotational energy harvester for human motion. J. Phys. Conf. Series 2013, 476, 012010. [Google Scholar] [CrossRef]
- Halloran, A.; Malley, F.; McHugh, P. A review on dielectric elastomer actuators, technology, applications, and challenges. J. Appl. Phys. 2008, 104, 071101. [Google Scholar] [CrossRef]
- Pelrine, R.; Kornbluh, R.D.; Eckerle, J. Dielectric elastomers: Generator mode fundamentals and applications. In Smart Structures and Materials 2001: Electroactive Polymer Actuators and Devices. Int. Soc. Opt. Photonics 2001, 4239, 148–156. [Google Scholar]
- Nam, J.D.; Choi, H.R.; Koo, J.C.; Lee, Y.K.; Kim, K.J. Dielectric elastomers for artificial muscles. In Electroactive Polymers for Robotic Applications; Springer: London, UK, 2007; pp. 37–48. [Google Scholar]
- Shankar, R.; Ghosh, T.K.; Spontak, R.J. Dielectric elastomers as next-generation polymeric actuators. Soft Matter. 2007, 3, 1116–1129. [Google Scholar] [CrossRef]
- Prahlad, H.; Kornbluh, R.; Pelrine, R. Polymer power: Dielectric elastomers and their applications in distributed actuation and power generation. In Proceedings of the ISSS 2005 International Conference on Smart Materials Structures and Systems, Bangalore, India, 28–30 July 2005. [Google Scholar]
- Kornbluh, D.; Pelrine, R.; Pei, Q. Electroelastomers: Applications of dielectric elastomer transducers for actuation, generation, and smart structures. In Smart Structures and Materials 2002: Industrial and Commercial Applications of Smart Structures Technologies; Society of Photo Optical: San Diego, CA, USA, 2002; Volume 4698. [Google Scholar]
- Pelrine, R.E.; Kornbluh, R.D.; Joseph, J.P. Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation. Sens. Actuators A Phys. 1998, 64, 77–85. [Google Scholar] [CrossRef]
- Deng, Z.; Dapino, M.J. Review of magnetostrictive vibration energy harvesters. Smart Mater. Struct. 2017, 26, 103001. [Google Scholar] [CrossRef]
- Saren, A.; Musiienko, D.; Smith, A.R.; Tellinen, J.; Ullakko, K. Modeling and design of a vibration energy harvester using the magnetic shape memory effect. Smart Mater. Struct. 2015, 24, 095002. [Google Scholar] [CrossRef]
- Amin, M.; Farsangi, A.; Cottone, F.; Sayyaadi, H. Energy harvesting from structural vibrations of magnetic shape memory alloys. Appl. Phys. Lett. 2017, 110, 103905. [Google Scholar]
- Berdy, D.F.; Valentino, D.J.; Peroulis, D. Kinetic energy harvesting from human walking and running using a magnetic levitation energy harvester. Sens. Actuators A Phys. 2015, 222, 262–271. [Google Scholar] [CrossRef]
- Wang, L.; Yuan, F.G. Vibration energy harvesting by magnetostrictive material. Smart Mater. Struct. 2008, 17, 045009. [Google Scholar] [CrossRef]
- Poulin, G.; Sarraute, E.; Costa, F. Generation of electrical energy for portable devices: Comparative study of an electromagnetic and a piezoelectric system. Sens. Actuators A Phys. 2004, 116, 461–471. [Google Scholar] [CrossRef]
- Arroyo, E.; Badel, A.; Formosa, F. Comparison of electromagnetic and piezoelectric vibration energy harvesters: Model and experiments, Sens. Actuators A Phys. 2012, 183, 148–156. [Google Scholar] [CrossRef]
- Wang, X.; Liang, X.; Hao, Z. Comparison of electromagnetic and piezoelectric vibration energy harvesters with different interface circuits. Mech. Syst. Signal Proces. 2016, 72, 906–924. [Google Scholar] [CrossRef]
- Pokale, R.S.; Deshmukh, T.R. Design and analysis of a mechanical device to harvest energy from human footstep motion. Int. J. Innov. Emerg. Res. Eng. 2016, 3, 545–550. [Google Scholar]
- Paradiso, J.A.; Starner, T. Energy scavenging for mobile and wireless electronics. IEEE Pervasive Comput. 2005, 4, 18–27. [Google Scholar] [CrossRef]
- Saha, C.R.; O’Donnell, T.; Wang, N.; McCloskey, P. Electromagnetic generator for harvesting energy from human motion. Sens. Actuators A Phys. 2008, 147, 248–253. [Google Scholar] [CrossRef]
- Rome, L.C.; Flynn, L.; Goldman, E.M.; Yoo, T.D. Generating electricity while walking with loads. Science 2005, 309, 1725–1728. [Google Scholar] [CrossRef]
- Kluger, J.M.; Sapsis, T.P.; Slocum, A.H. Robust energy harvesting from walking vibrations by means of nonlinear cantilever beams. J. Sound Vib. 2015, 341, 174–194. [Google Scholar] [CrossRef]
- Miah, A.H.; Hyunok, C.; Md, S.; Jae, Y.P. A miniaturized electromagnetic vibration energy harvester using flux-guided magnet stacks for human-body-induced motion. Sens. Actuators A Phys. 2016, 249, 23–31. [Google Scholar]
- Chapius, A.; Jaquet, E. The History of the Self-Winding Watch 1770–1931; Roto-Sadag: Geneva, Switzerland, 1956. [Google Scholar]
- Hayakawa, M. Electric Wristwatch with Generator. U.S. Patent 5,001,685, 19 March 1991. [Google Scholar]
- Mitcheson, P.D.; Yeatman, E.M.; Rao, G.K. Energy harvesting from human and machine motion for wireless electronic devices. Proc. IEEE 2008, 96, 1457–1486. [Google Scholar] [CrossRef]
- Huang, H.; Merrett, G.V.; White, N.M. Design of a linearized magnetic spring for body-worn inertial energy harvesters. In Proceedings of the 2012 Ninth International Conference on Networked Sensing, Antwerp, Belgium, 11–14 June 2012. [Google Scholar]
- Fan, K.; Yu, B.; Tang, L. Scavenging energy from human limb motions. In Proceedings of the SPIE 10164, Active and Passive Smart Structures and Integrated Systems, Portland, OR, USA, 11 April 2017. [Google Scholar]
- Donelan, J.M.; Li, Q.; Naing, V. Biomechanical energy harvesting: Generating electricity during walking with minimal user effort. Science 2008, 319, 807–810. [Google Scholar] [CrossRef]
- Li, Q.; Naing, V.; Donelan, J.M. Development of a biomechanical energy harvester. J. Neuroeng. Rehabil. 2009, 6, 22. [Google Scholar] [CrossRef]
- Kuang, Y.; Ruan, T.; Chew, Z.J.; Zhu, M. Energy harvesting during human walking to power a wireless sensor node. Sens. Actuators A Phys. 2017, 254, 69–77. [Google Scholar] [CrossRef]
- Shan, Q.; Zhang, M.; Chen, Q. Inertia energy harvest of human walking to power mobile electronic. J. Electron. Meas. Instru. 2009, 23, 70–75. [Google Scholar]
- Li, Q.; Naing, V.; Hoffer, J.A.; Weber, D.J.; Kuo, A.D.; Donelan, J.M. Biomechanical energy harvesting: Apparatus and method. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadens, CA, USA, 19–23 May 2008. [Google Scholar]
- El-Hami, M.; Glynne, P.; White, N.M.; Hill, M. Design and fabrication of a new vibration-based electromechanical power generator. Sens. Actuators A Phys. 2001, 92, 335–342. [Google Scholar] [CrossRef]
- Wei, X.; Liu, J. Power sources and electrical recharging strategies for implantable medical devices. Front. Energy Power Eng. China 2008, 2, 1–13. [Google Scholar] [CrossRef]
- Dai, D.; Liu, J.; Zhou, Y. Harvesting biomechanical energy in the walking by shoe based on liquid metal magnetohydrodynamics. Front. Energy 2012, 6, 112–121. [Google Scholar] [CrossRef]
- Dai, D.; Zhou, Y.; Liu, J. Liquid metal based thermoelectric generation system for waste heat recovery. Renew. Energy 2011, 36, 3530. [Google Scholar] [CrossRef]
- Jia, D.; Liu, J.; Zhou, Y. Harvesting human kinematical energy based on liquid metal magnetohydrodynamics. Phys. Lett. A 2009, 373, 1305. [Google Scholar] [CrossRef]
- Krupenkin, T.; Taylor, J.A. Reverse electrowetting as a new approach to high-power energy harvesting. Nat. Commun. 2011, 2, 448. [Google Scholar] [CrossRef] [PubMed]
- Mugele, F.; Duits, M.; Van, D.E. Electrowetting: A versatile tool for drop manipulation, generation, and characterization. Adv. Colloid Interface Sci. 2010, 161, 115–123. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.L. Towards self-powered nanosystems: From nanogenerators to nanopiezotronics. Adv. Funct. Mater. 2010, 18, 3553–3567. [Google Scholar] [CrossRef]
- Hou, T.; Yang, Y.; Zhang, H.; Chen, J. Triboelectric nanogenerator built inside shoe insole for harvesting walking energy. Nano Energy 2013, 2, 856–862. [Google Scholar] [CrossRef]
- Fan, F.; Tian, Z.; Wang, Z. Flexible triboelectric generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Huang, T.; Wang, C.; Yu, H. Human walking-driven wearable all-fiber triboelectric nanogenerator containing electrospun polyvinylidene fluo-ride piezoelectric nanofibers. Nano Energy 2015, 14, 226–235. [Google Scholar] [CrossRef]
- Zheng, Y.; Cheng, L.; Yuan, M. An electrospun nanowire-based triboelectric nanogenerator and its application in a fully self-powered UV detector. Nanoscale 2014, 6, 7842–7846. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, H.; Lin, Z. Human skin based triboelectric nanogenerators for harvesting biomechanical energy and as self-powered active tactile sensor system. ACS Nano 2013, 7, 9213–9222. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Xie, Y.; Niu, S. Freestanding triboelectric-layer-based nanogenerators for harvesting energy from a moving object or human motion in contact and non-contact modes. Adv. Mater. 2014, 26, 2818–2824. [Google Scholar] [CrossRef] [PubMed]
- Xie, Y.; Wang, S.; Niu, S. Grating-structured freestanding triboelectric-layer nanogenerator for harvesting mechanical energy at 85% total conversion efficiency. Adv. Mater. 2014, 26, 6599–6607. [Google Scholar] [CrossRef] [PubMed]
- Mitcheson, P.D.; Sterken, T.; He, C.; Kiziroglou, M. Electrostatic microgenerators. Meas. Control 2008, 41, 114–119. [Google Scholar] [CrossRef]
- Baginsky, I.L.; Kostsov, E.G.; Kamishlov, V.F. Two-capacitor electrostatic microgenerators. Engineering 2013, 5, 9–18. [Google Scholar] [CrossRef]
- San, H.; Cheng, Z.; Deng, Z. Design and simulation of MEMS based radioisotope converter with electrostatic capacitive energy conversion mechanism. In Proceedings of the 2011 6th IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Kaohsiung, Taiwan, 20–23 February 2011. [Google Scholar]
- Roundy, S.; Wright, P.K.; Pister, K.S. Micro-electrostatic vibration-to-electricity converters. Fuel Cells 2002, 220, 1–10. [Google Scholar]
- Basset, P.; Galayko, D.; Cottone, F. Electrostatic vibration energy harvester with combined effect of electrical nonlinearities and mechanical impact. J. Micromech. Microeng. 2014, 24, 035001. [Google Scholar] [CrossRef]
- Dragunov, V.; Dorzhiev, V. Electrostatic vibration energy harvester with increased charging current. J. Phys. Conf. Ser. 2013, 476, 012115. [Google Scholar] [CrossRef]
- Divya, K.C.; Østergaard, J. Battery energy storage technology for power systems-An overview. Electr. Power Syst. Res. 2009, 79, 511–520. [Google Scholar] [CrossRef]
- Aneke, M.; Wang, M. Energy storage technologies and real life applications—A state of the art review. Appl. Energy 2016, 179, 350–377. [Google Scholar] [CrossRef]
- Hadjipaschalis, I.; Poullikkas, A.; Efthimiou, V. Overview of current and future energy storage technologies for electric power applications. Renew. Sustain. Energy Rev. 2009, 13, 1513–1522. [Google Scholar] [CrossRef]
- Dunn, B.; Kamath, H.; Tarascon, J. Electrical energy storage for the grid: A battery of choices. Science 2011, 334, 928. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Li, F.; Ma, L.P.; Cheng, H.M. Advanced materials for energy storage. Adv. Mater. 2010, 22, E28–E62. [Google Scholar] [CrossRef] [PubMed]
- Sodano, H.A.; Inman, D.J.; Park, G. Generation and storage of electricity from power harvesting devices. J. Intell. Mater. Syst. Struct. 2005, 16, 67–75. [Google Scholar] [CrossRef]
- Wei, S.; Hu, H.; He, S. Modeling and experimental investigation of an impact-driven piezoelectric energy harvester from human motion. Smart Mater. Struct. 2013, 22, 105020. [Google Scholar] [CrossRef]
- Sheng, W.; Zhang, T.; Xu, L. A review of power scavenging from vibration sources based on the piezoelectric effect. Mech. Sci. Tech. Aerosp. Eng. 2010, 29, 1515–1521. [Google Scholar]
- Zanchi, V.; Papi, V.; Cecic, M. Quantitative human gait analysis. Simul. Pract. Theory 2000, 8, 127–139. [Google Scholar] [CrossRef]
- Borowy, B.S.; Salameh, Z.M. Dynamic response of a stand-alone wind energy conversion system with battery energy storage to a wind gust. IEEE Trans. Energy Convers. 1997, 12, 73–78. [Google Scholar] [CrossRef]
- Fathima, A.H.; Palanisamy, K. Battery energy storage applications in wind integrated systems-A review. In Proceedings of the 2014 International Conference on Smart Electric Grid (ISEG), Guntur, India, 19–20 September 2014. [Google Scholar]
- Chan, C.K.; Peng, H.; Liu, G.; McIlwrath, K. High-performance lithium battery anodes using silicon nanowires. Nat. Nanotech. 2008, 3, 31–35. [Google Scholar] [CrossRef]
- Guan, M.; Liao, W.H. On the energy storage devices in piezoelectric energy harvesting. In Proceedings of the Smart Structures and Materials 2006: Damping and Isolation. Int. Soc. Opt. Photonics 2006, 6169, 61690C. [Google Scholar]
- Ouyang, X.; Ding, S.; Fan, B.; Li, P. Development of a novel compact hydraulic power unit for the exoskeleton robot. Mechatronics 2016, 38, 68–75. [Google Scholar] [CrossRef]
- Gonz’alez, J.L.; Rubio, A.; Moll, F. Human powered piezoelectric batteries to supply power to wearable electronic devices. Int. J. Soc. Mater. Eng. Resour. 2002, 10, 34–40. [Google Scholar] [CrossRef]
- Indrajit, S.; Sagar, M.; Kalyan, B. A review of energy harvesting technology and its potential applications. Environ. Earth Sci. Res. J. 2017, 4, 33–38. [Google Scholar]
- Jia, Y.; Wei, X.; Pu, J.; Xie, P.; Wen, T.; Wang, C.; Lian, P.; Xue, S.; Shi, Y. A numerical feasibility study of kinetic energy harvesting from lower limb prosthetics. Energies 2019, 12, 3824. [Google Scholar] [CrossRef]
- Han, J.; Von, J.A.; Le, T. Novel power conditioning circuits for piezoelectric micro-power generators. In Proceedings of the Nineteenth Annual IEEE Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, 22–26 February 2004; pp. 1541–1546. [Google Scholar]
- Ottman, G.K.; Hofmann, H.F. Adaptive piezoelectric energy harvesting circuit for wireless remote power supply. In Proceedings of the 19th AIAA Applied Aerodynamics Conference, Anaheim, CA, USA, 11–14 June 2001. [Google Scholar]
- Bonisoli, E.; Repetto, M.; Manca, N.; Gasparini, A. Electro-mechanical and electronic integrated harvester for shoes application. IEEE/ASME Trans. Mech. 2017, 22, 1921–1932. [Google Scholar] [CrossRef]
- Rome, L.C.; Flynn, L.; Yoo, T.D. Rubber bands reduce the cost of carrying loads. Nature 2006, 444, 1023–1024. [Google Scholar] [CrossRef]
- Collins, S.H.; Wiggin, M.B.; Sawicki, G.S. Reducing the energy cost of human walking using an unpowered exoskeleton. Nature 2015, 522, 212–215. [Google Scholar] [CrossRef]
- Collins, S.H.; Kuo, A.D. Recycling energy to restore impaired ankle function during human walking. PLoS ONE 2010, 5, e9307. [Google Scholar] [CrossRef]
- Bansal, P.; Marshall, N. Feasibility of hydraulic power recovery from waste energy in bio-gas scrubbing processes. Appl. Energy 2010, 87, 1048–1053. [Google Scholar] [CrossRef]
- Hirai, H.; Ozawa, R.; Goto, S.; Fujigaya, H. Development of an ankle-foot orthosis with a pneumatic passive element. In Proceedings of the ROMAN 2006-The 15th IEEE International Symposium on Robot and Human Interactive Communication, Hatfield, UK, 6–8 September 2006. [Google Scholar]
- Yang, H.; Pan, M. Engineering research in fluid power: A review. J. Zhejiang Univ. Sci. A 2015, 16, 427–442. [Google Scholar] [CrossRef]
- Chin, R.; Hsiao-Wecksler, E.T.; Loth, E. A pneumatic power harvesting ankle-foot orthosis to prevent foot-drop. J. Neuroeng. Rehabil. 2009, 6, 19. [Google Scholar] [CrossRef] [PubMed]
- Takaiwa, M.; Noritsugu, T. Development of pneumatic walking support shoes using wearer’s potential energy. In Proceedings of the JFPS International Symposium on Fluid Power, Toyama, Japan, 15–18 September 2008. [Google Scholar]
- Zoss, A.; Kazerooni, H. Design of an electrically actuated lower extremity exoskeleton. Adv. Robo. 2006, 20, 967–988. [Google Scholar] [CrossRef]
- Lee, S.; Oh, L.; Lee, Y.; Choi, L. Development of micro hydraulic actuator for force assistive wearable robot. In Proceedings of the IEEE ISR 2013, 24–26 October 2013; pp. 1–6. [Google Scholar]
- Kang, T.; Kaminaga, H.; Nakamura, Y. A robot hand driven by hydraulic cluster actuators. In Proceedings of the 2014 IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 39–44. [Google Scholar]
- Zhu, Y.; Zou, J.; Yang, H. Wear performance of metal parts fabricated by selective laser melting: A literature review. J. Zhejiang Univ. Sci. A 2018, 19, 95–110. [Google Scholar] [CrossRef]
- Semini, C.; Goldsmith, J.; Manfredi, D.; Calignano, F. Additive manufacturing for agile legged robots with hydraulic actuation. In Proceedings of the 2015 International Conference on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July 2015. [Google Scholar]
- Liu, Y.; Xu, L.; Zuo, L. Design, modeling, lab and field tests of a mechanical-motion-rectifier-based energy harvester using a ball-screw mechanism. IEEE/ASME Trans. Mech. 2017, 22, 1933–1943. [Google Scholar] [CrossRef]
- Lodewyks, J.; Zurbrügg, P. Decentralized energy-saving hydraulic concepts for mobile working machines. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016. [Google Scholar]
- Stelson, K.A. Saving the world’s energy with fluid power. In Proceedings of the 8th JFPS International Symposium on Fluid Power, Okinawa, Japan, 25–28 October 2011. [Google Scholar]
- Schroter, J.; Jacobs, G. Development of high speed electric drives for mobile machinery-challenges and potential solutions. In Proceedings of the 9th International Fluid Power Conference, Aachen, Germany, 24–26 March 2014. [Google Scholar]
- Ulbricht, A.; Gude, M.; Barfuß, D.; Birke, M. Potential and application fields of lightweight hydraulic components in multi-material design. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germnay, 8–10 March 2016. [Google Scholar]
- Foglyano, K.M.; Kobetic, R.; To, C.S. Feasibility of a hydraulic power assist system for use in hybrid neuroprostheses. Appl. Bionics Biomech. 2005, 2005, 205104. [Google Scholar] [CrossRef]
- Lee, H.; Kim, W.; Han, J.; Han, C. The technical trend of the exoskeleton robot system for human power assistance. Int. J. Precis. Eng. Manuf. 2012, 13, 1491–1497. [Google Scholar] [CrossRef]
- Yu, T.; Plummer, A.; Iravani, P. The design, analysis and testing of a compact electrohydrostatic powered ankle prosthesis. In Proceedings of the BATH/ASME 2016 Symposium on Fluid Power and Motion Control, Bath, UK, –9 September 2016. [Google Scholar]
- Zhang, X.; Guo, Q.; Zhao, C.; Zhang, Y.; Luo, X. Development of a lower extremity exoskeleton suit actuated by hydraulic. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 587–591. [Google Scholar]
- Wang, Z.; Shi, H.; Wang, H.; Mei, X. An energy harvesting mechanism transfer human walking energy to hydraulic power. In Proceedings of the 2017 24th International Conference on Mechatronics and Machine Vision in Practice, Auckland, New Zealand, 21–23 November 2017. [Google Scholar]
- Nilsson, J.; Thorstensson, A. Ground reaction forces at different speeds of human walking and running. Acta Physiol. Scand. 1989, 136, 217–227. [Google Scholar] [CrossRef]
- Zakria, M.; Maqbool, H.F.; Hussain, T. Heuristic based gait event detection for human lower limb movement. In Proceedings of the 2017 IEEE EMBS International Conference on Biomedical & Health Informatics (BHI), Orlando, FL, USA, 16–19 February 2017. [Google Scholar]
- Walter, P.; Regina, K. Gait disorders in adults and the elderly: A clinical guide. Wien. Klin. Wochenschr. 2016, 129, 1–15. [Google Scholar]
- Giakas, G.; Vasilios, B. Time and frequency domain analysis of ground reaction forces during walking: An investigation of variability and symmetry. Gait Posture 1997, 5, 189–197. [Google Scholar] [CrossRef]
- Keller, T.S.; Weisberger, A.M.; Ray, J.L. Relationship between vertical ground reaction force and speed during walking, slow jogging, and running. Clin. Biomech. 1996, 11, 253–259. [Google Scholar] [CrossRef]
- Sue, C.; Tsai, N. Human powered MEMS-based energy harvest devices. Appl. Energy 2012, 93, 390–403. [Google Scholar] [CrossRef]
- Paradiso, J.A. System for human-powered mobile computing. In Proceedings of the 2006 43rd ACM/IEEE Design Automation Conference, San Francisco, CA, USA, 24–28 July 2006; Volume 30, pp. 645–650. [Google Scholar]
- McAdams, E.; Krupaviciute, A.; Gehin, C.; Grenier, E.; Massot, B. Wearable sensor systems: The challenges. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 Auguest–3 September 2011. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Energy Sources | Foot Stepping | Inertia Energy | Vibrations |
|---|---|---|---|
| Smart materials | √ | √ | √ |
| Electromagnetic induction | √ | √ | √ |
| Triboelectric effect | √ | √ | |
| Electrostatic capacitance | √ |
| References | Generated Electricity (W) |
|---|---|
| Paradiso et al. [55] | 0.25 |
| Rome et al. [16] | 7.4 |
| Donelan et al. [65] | 5 |
| Saha et al. [56] | 0.3–2.5 × 10−3 |
| Wei et al., 2009 [71] | 0-0.55 |
| Different Ways | Power Obtained | Advantages | Shortages |
|---|---|---|---|
| Smart materials | small | Compact/lightweight | Limited to light LEDs |
| Electromagnetic induction | medium | Fixed at many locations around body | Complex/bulky, difficult for storage |
| Triboelectric effect | small | integrated/lightweight | Affected by covered area |
| Electrostatic capacitance | small | compact/lightweight | Depend on the mechanical vibration frequency |
| Spring | large | No conversion of mechanical energy and direct storage | Release at the location of storage, poor flexibility for use |
| Fluid power (pneumatics, hydraulics) | large | Integration of harvest and utilization, easy for storage and transmission | Need pipelines, limited to walking machines or robotics driven by fluid power |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, H.; Liu, Z.; Mei, X. Overview of Human Walking Induced Energy Harvesting Technologies and Its Possibility for Walking Robotics. Energies 2020, 13, 86. https://doi.org/10.3390/en13010086
Shi H, Liu Z, Mei X. Overview of Human Walking Induced Energy Harvesting Technologies and Its Possibility for Walking Robotics. Energies. 2020; 13(1):86. https://doi.org/10.3390/en13010086
Chicago/Turabian StyleShi, Hu, Zhaoying Liu, and Xuesong Mei. 2020. "Overview of Human Walking Induced Energy Harvesting Technologies and Its Possibility for Walking Robotics" Energies 13, no. 1: 86. https://doi.org/10.3390/en13010086
APA StyleShi, H., Liu, Z., & Mei, X. (2020). Overview of Human Walking Induced Energy Harvesting Technologies and Its Possibility for Walking Robotics. Energies, 13(1), 86. https://doi.org/10.3390/en13010086