ANFTS Mode Control for an Electronically Controlled Hydraulic Power Steering System on a Permanent Magnet Slip Clutch


Abstract
1. Introduction
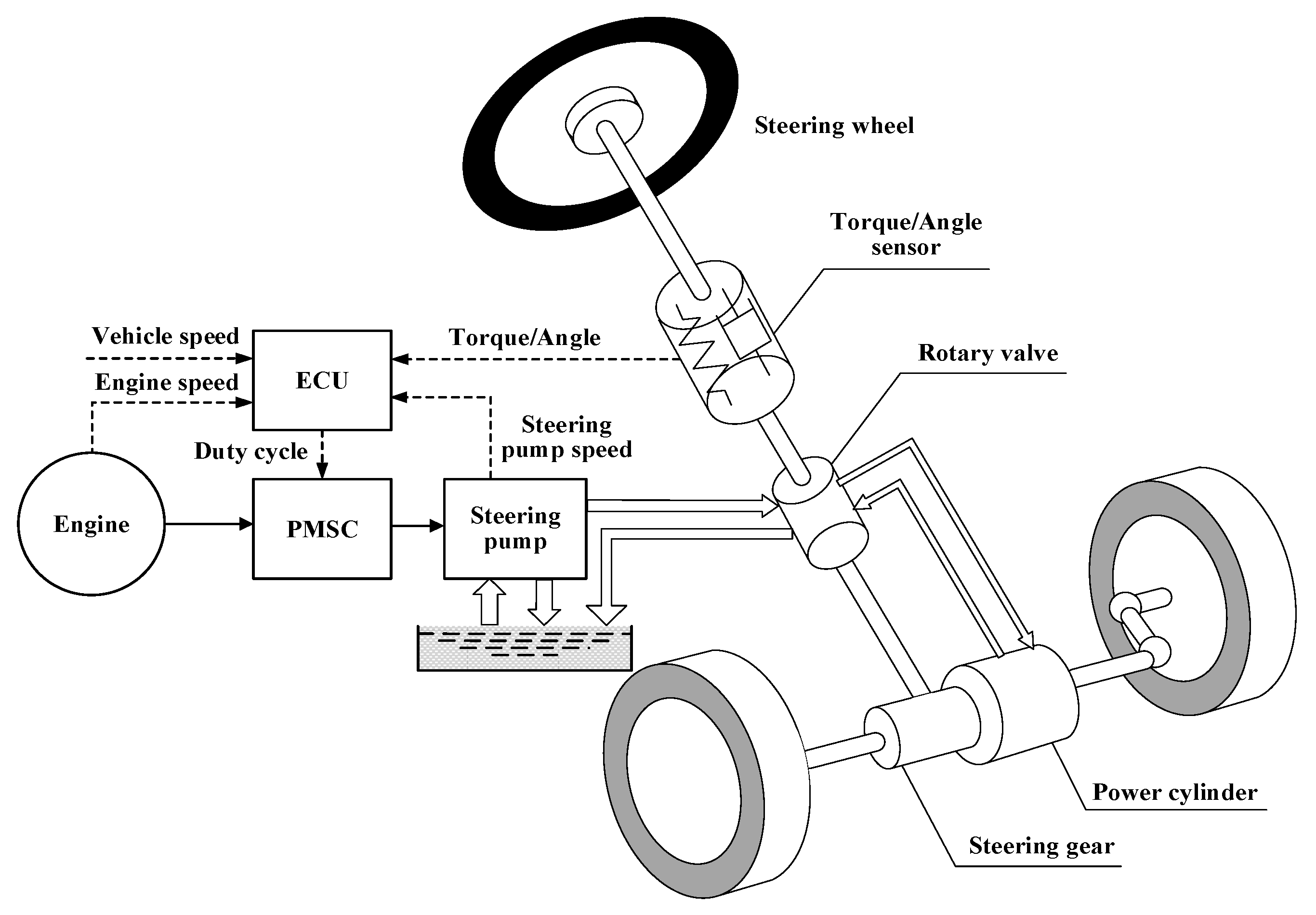
2. The Composition Principle of P-ECHPS
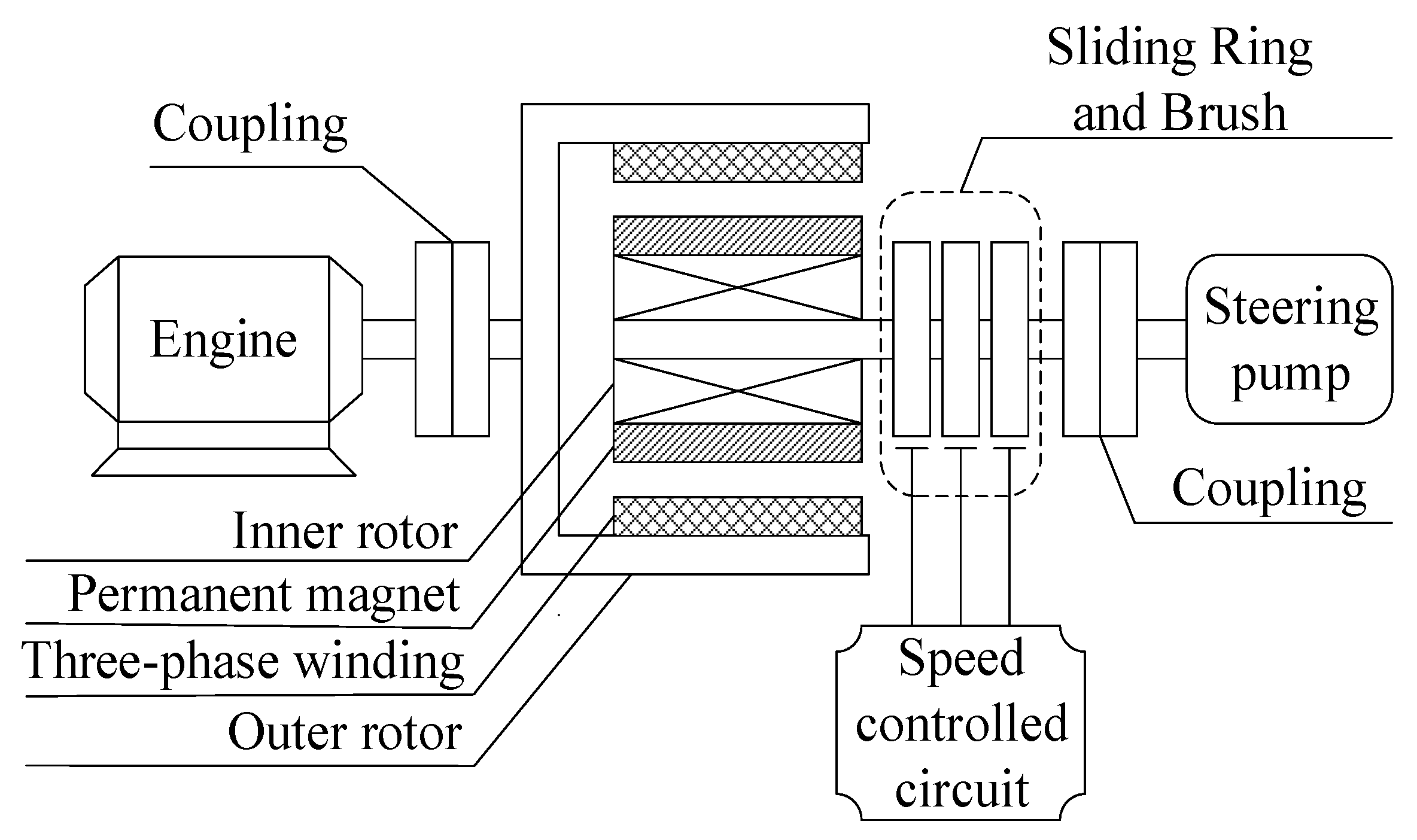
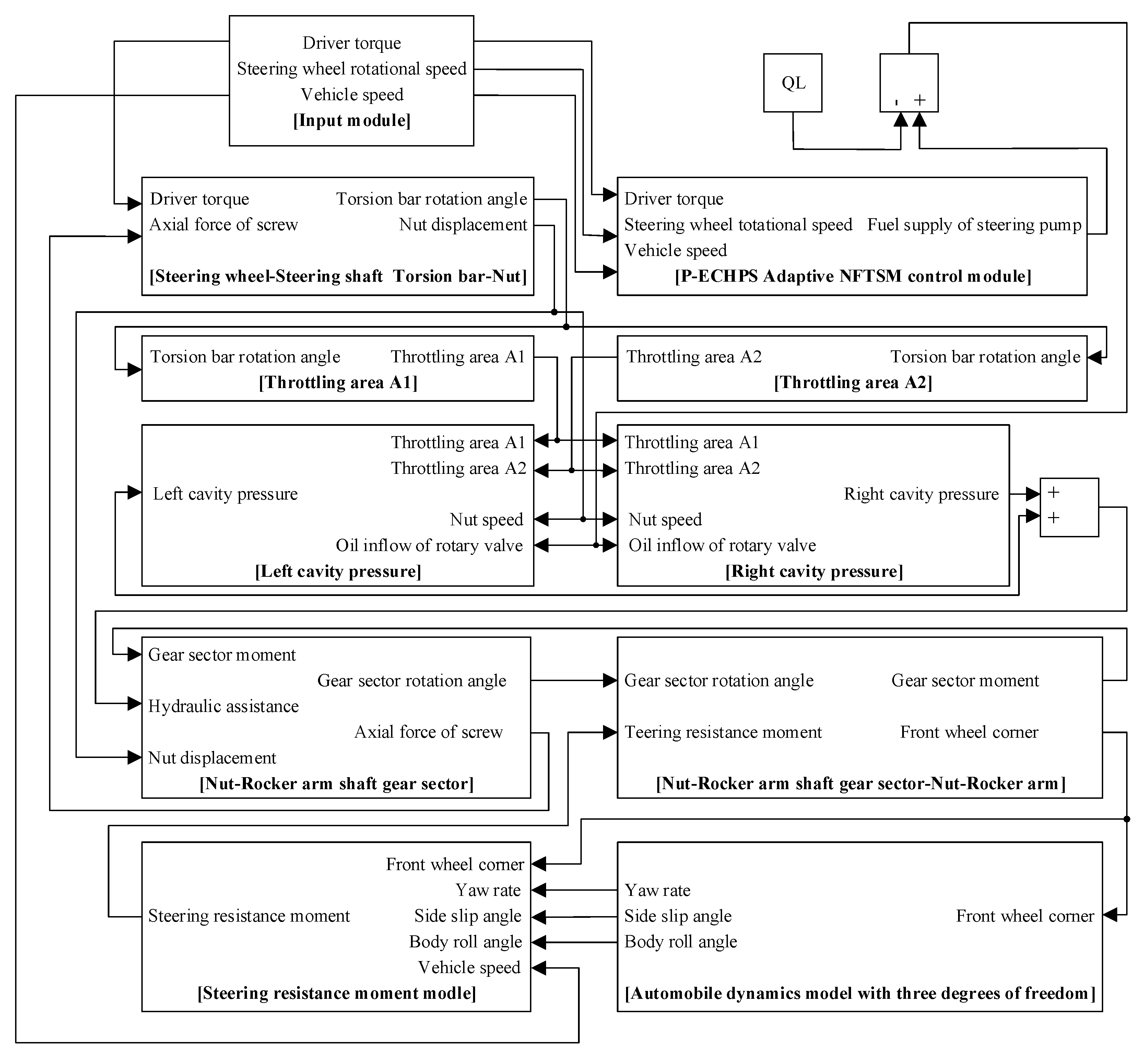
3. Structure and System Modeling of P-ECHPS
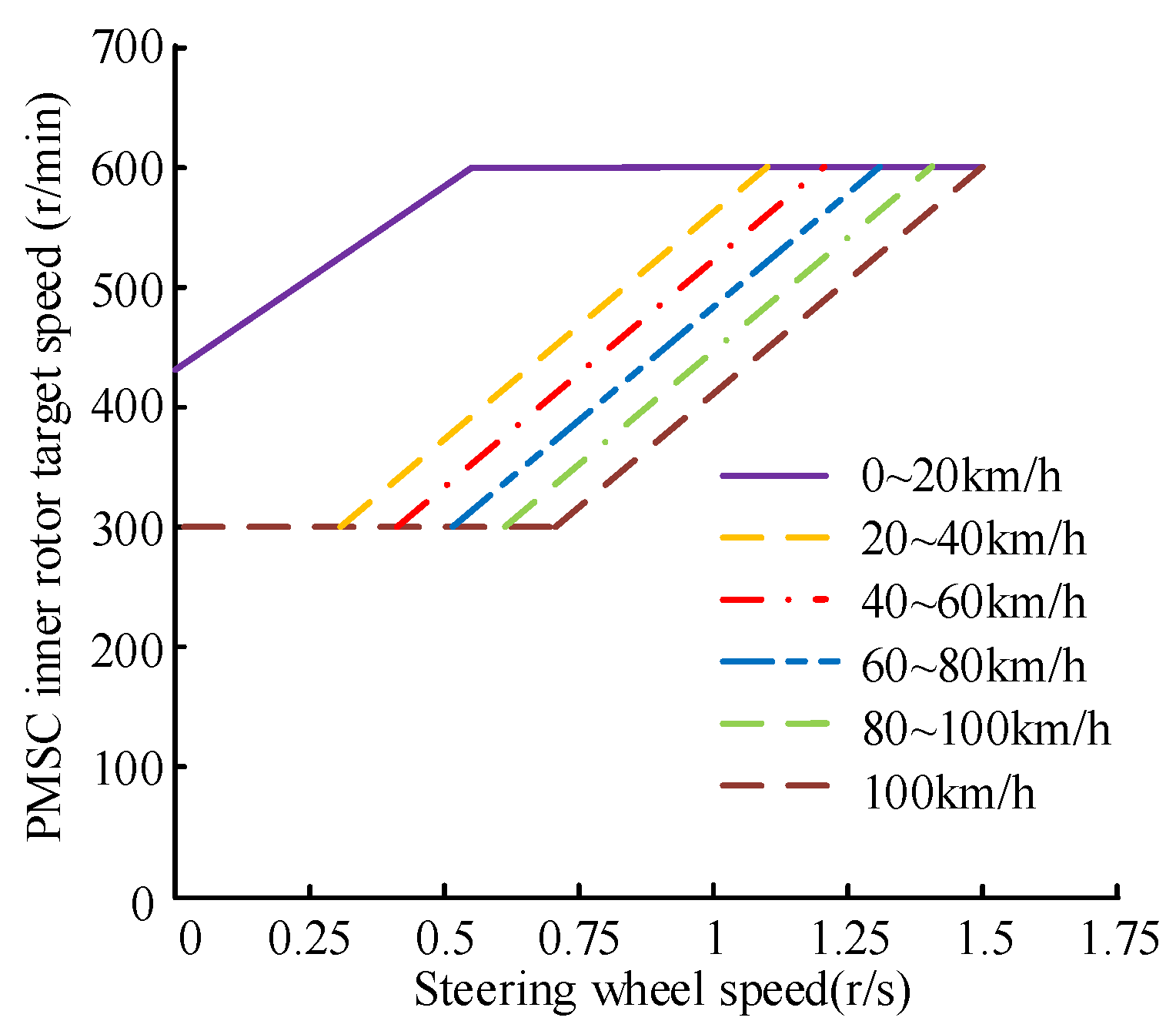
3.1. Speed Control Model of PMSC
3.2. Mechanical Subsystem Model
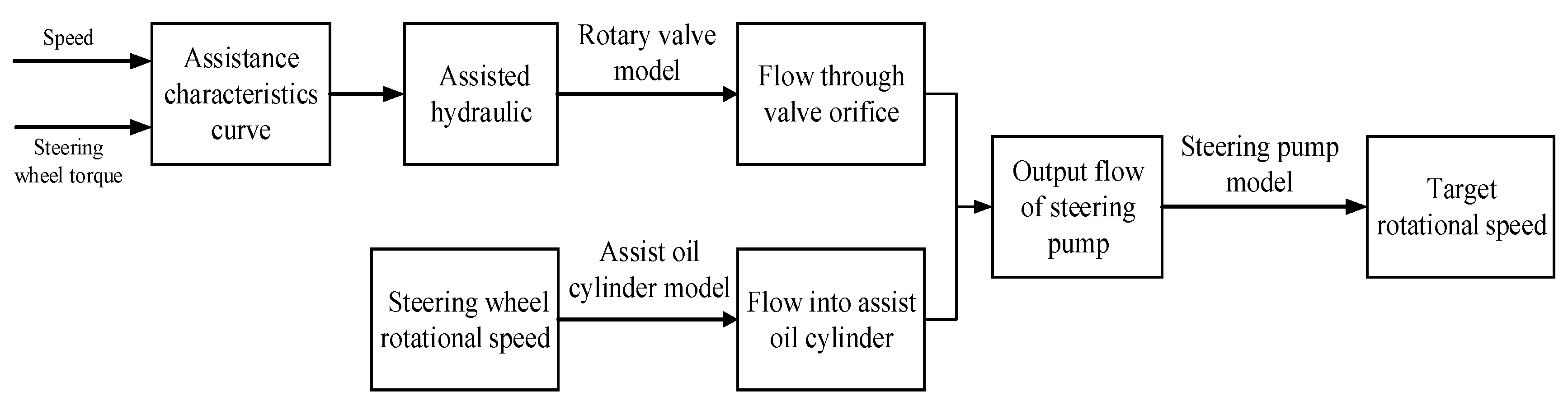
3.3. Hydraulic Subsystem Model
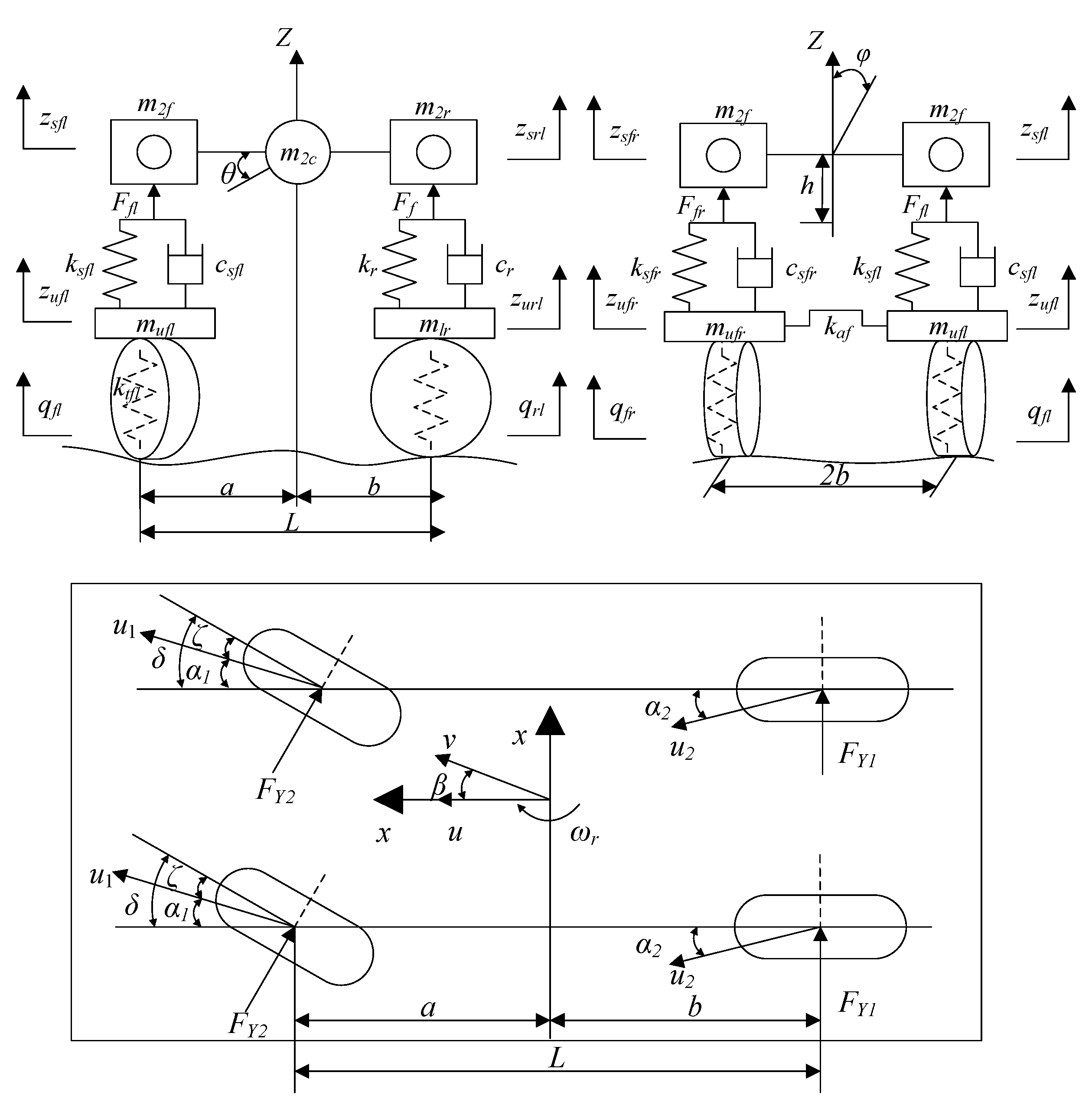
3.4. Automobile Dynamics Model
3.5. Tire Model and Steering Resistance Torque Model
4. P-ECHPS System Controller Design
4.1. Terminal Sliding Mode Control
4.1.1. Terminal Sliding Mode
4.1.2. Nonsingular Terminal Sliding Mode
4.1.3. Fast Terminal Sliding Mode
4.2. P-ECHPS System Control Strategy
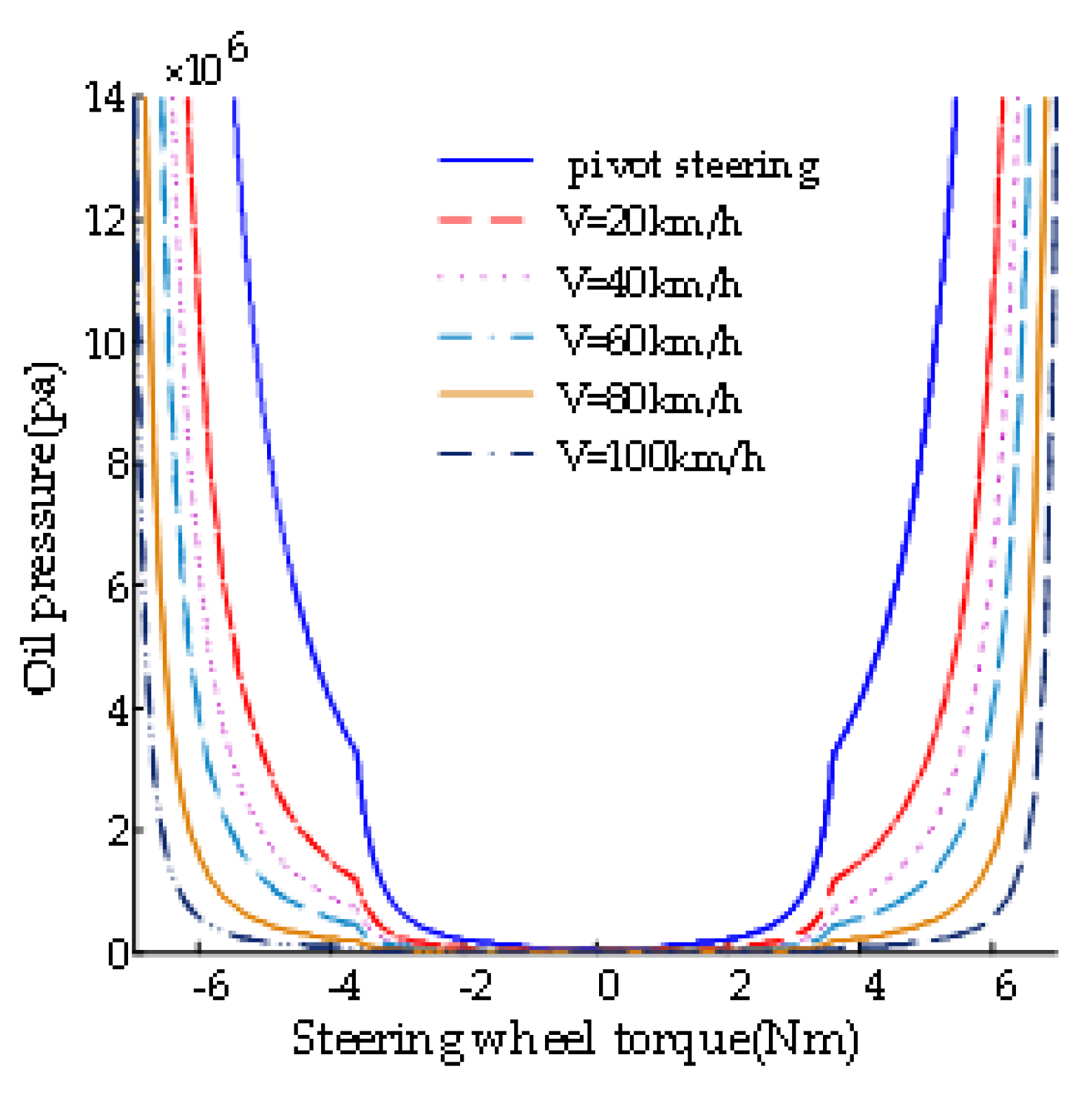
4.3. Assist Characteristics and Ideal Speed
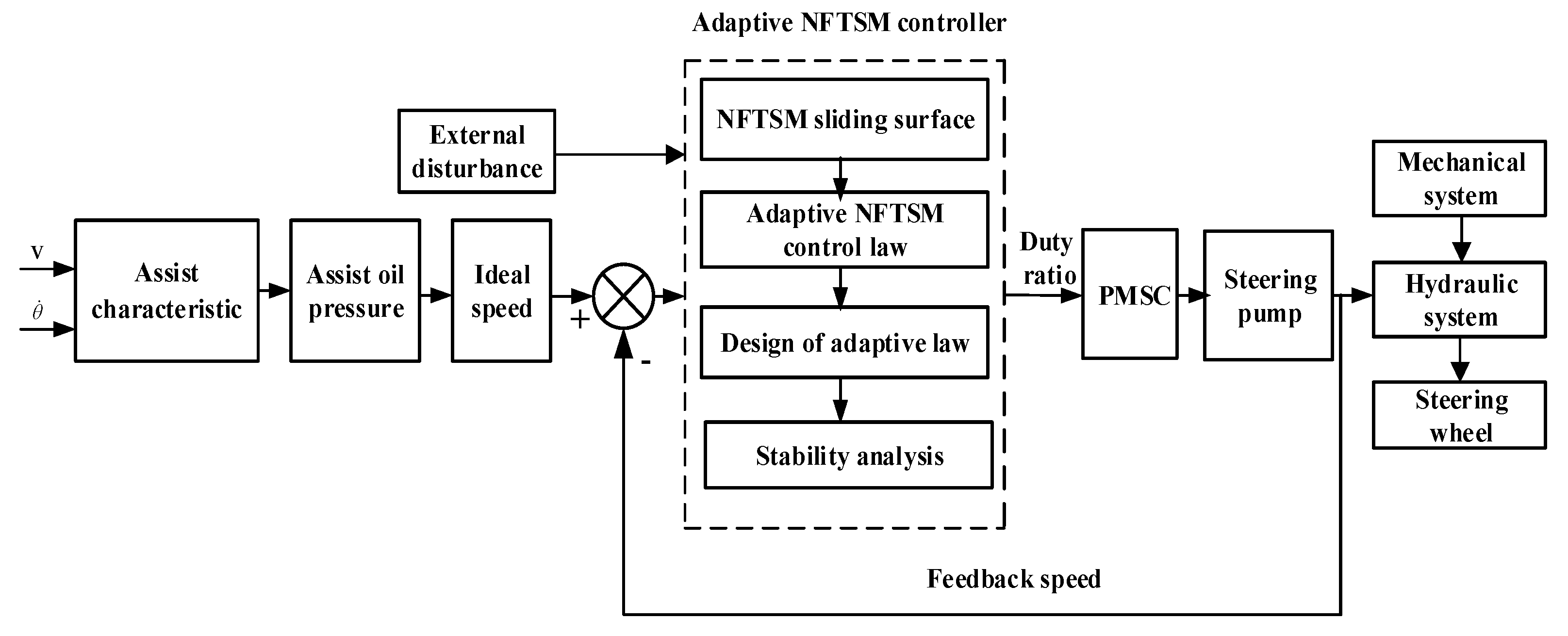
4.4. Adaptive NFTSM Controller Design
4.4.1. Error State Equation of the rotational Speed
4.4.2. Adaptive NFTSM Control Strategy
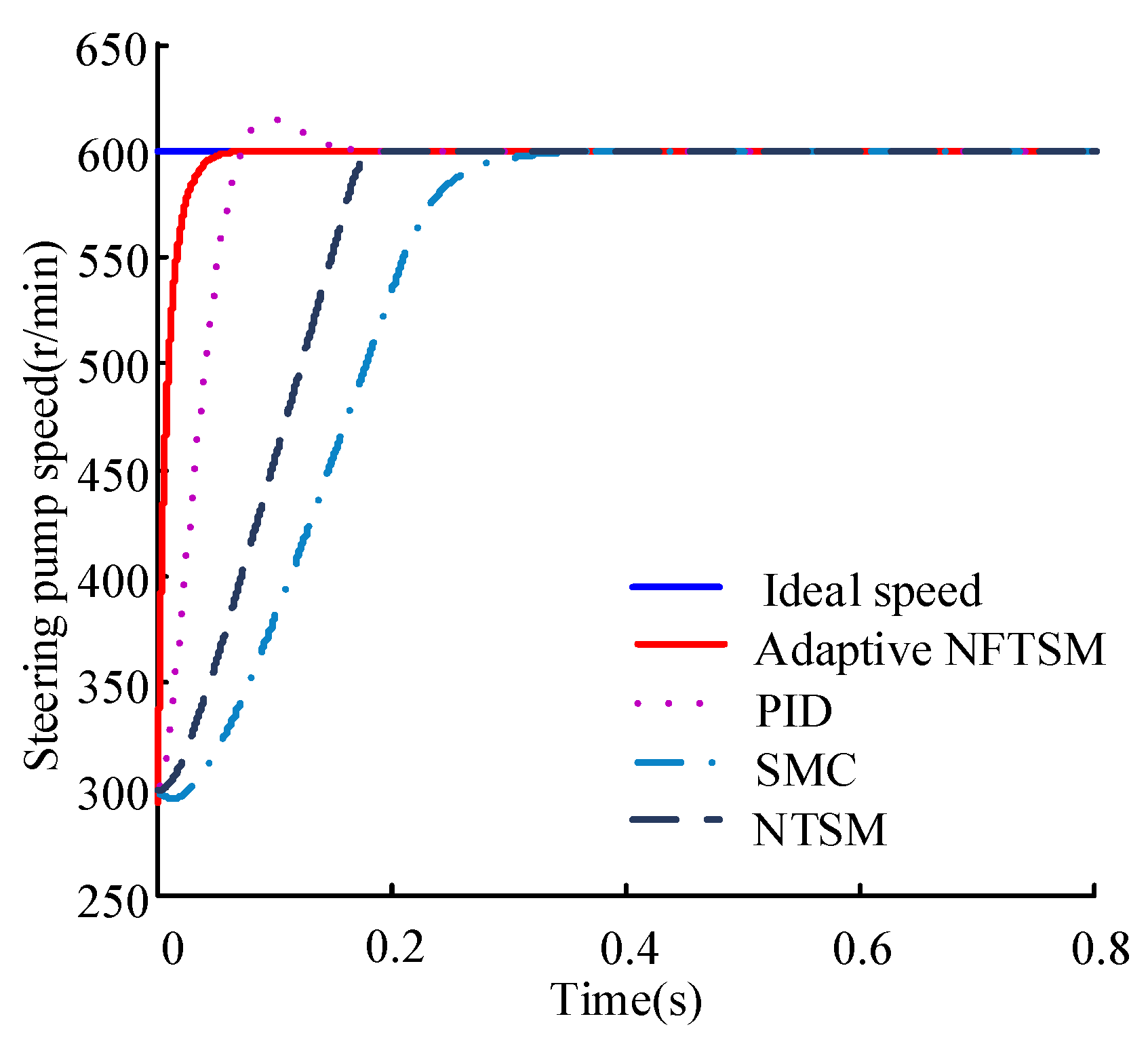
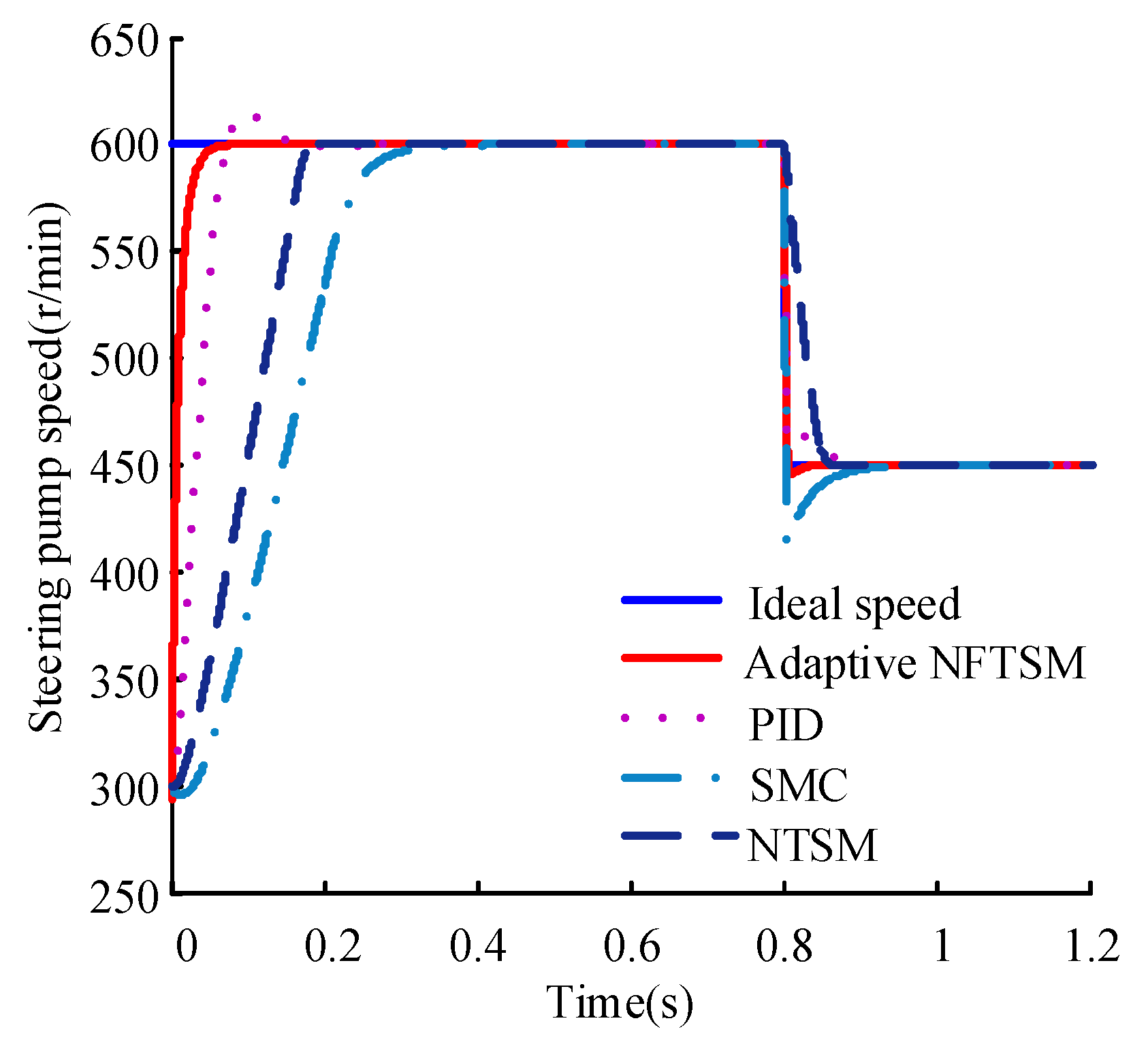
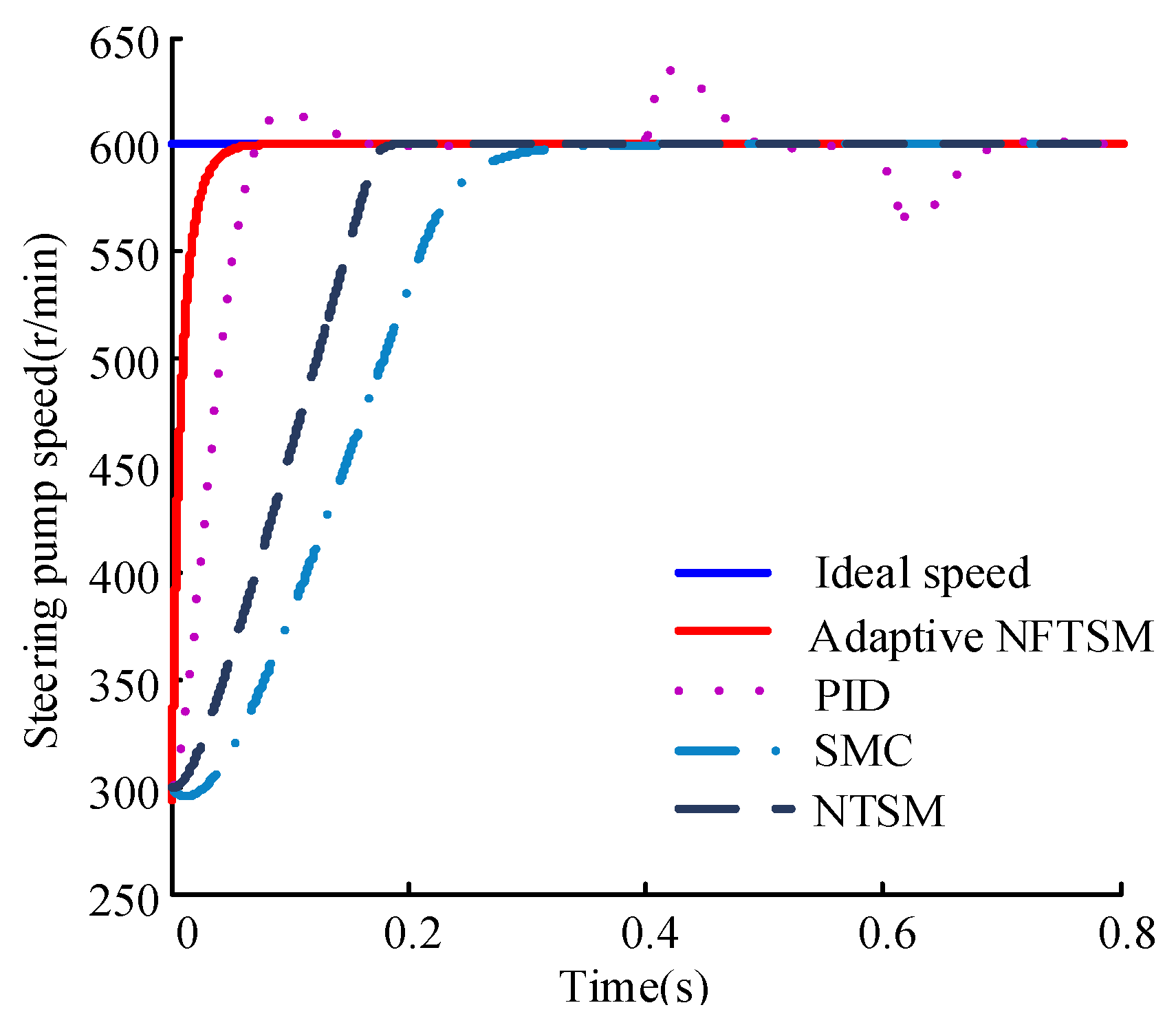
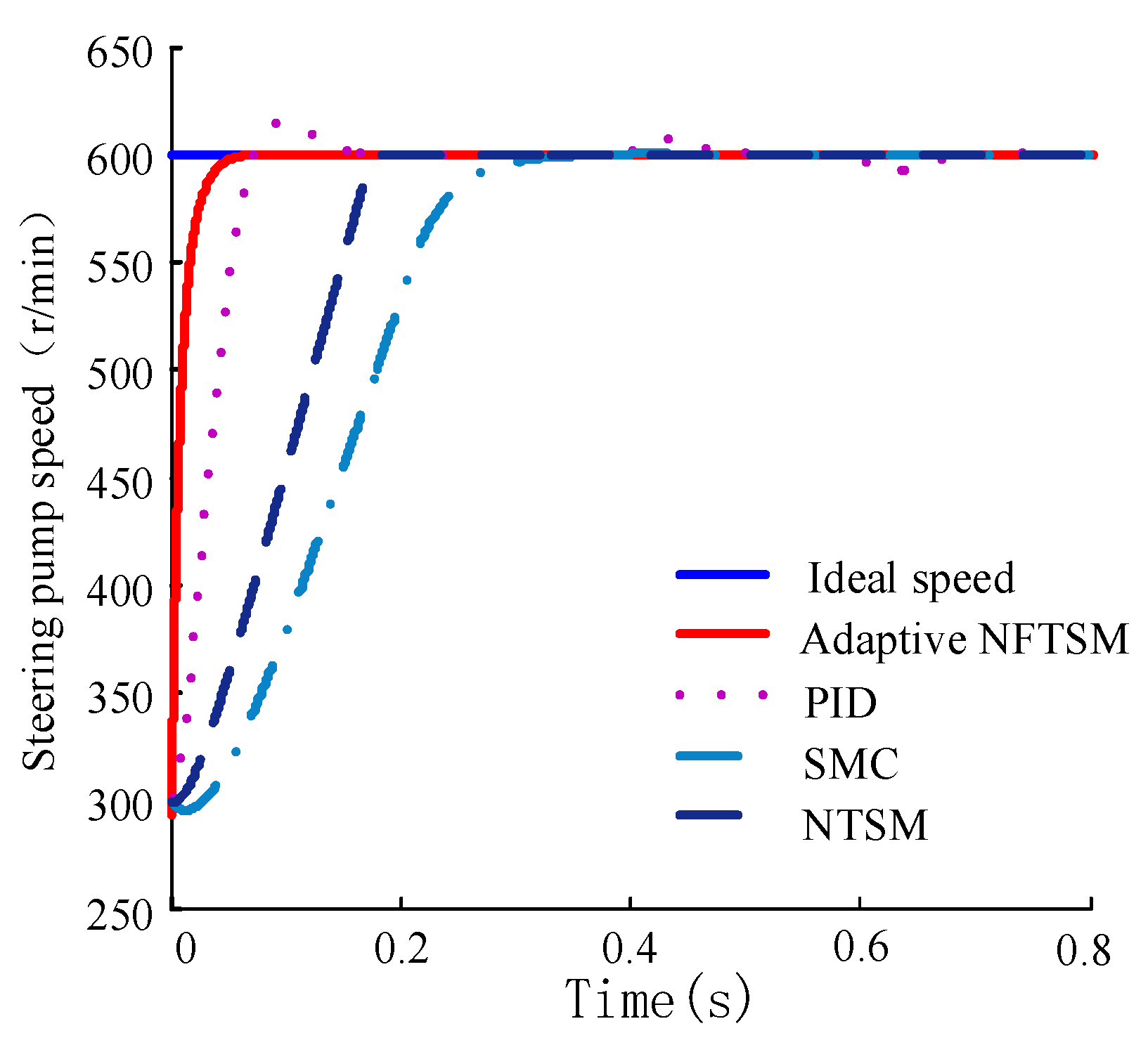
5. Simulation Analysis
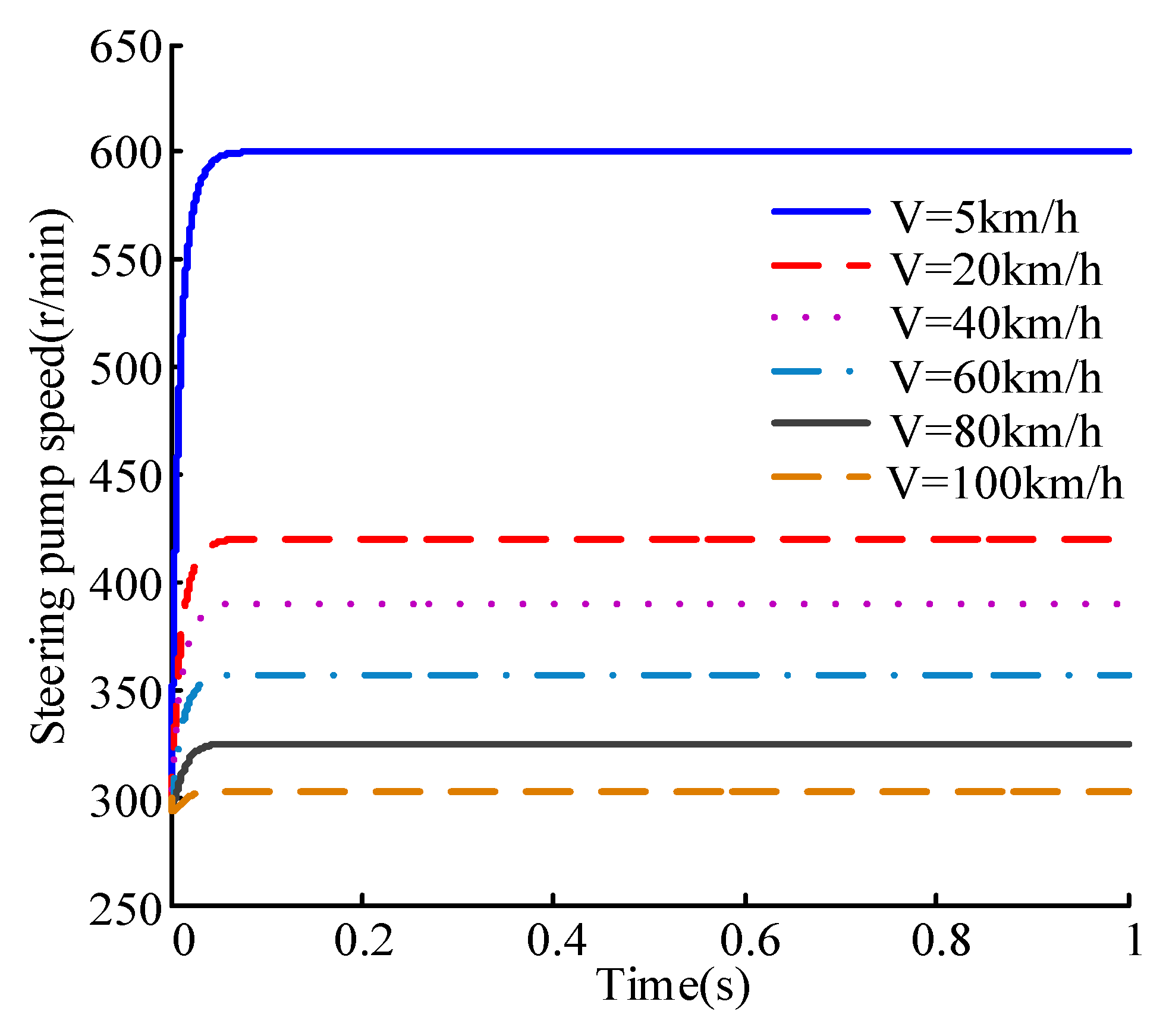
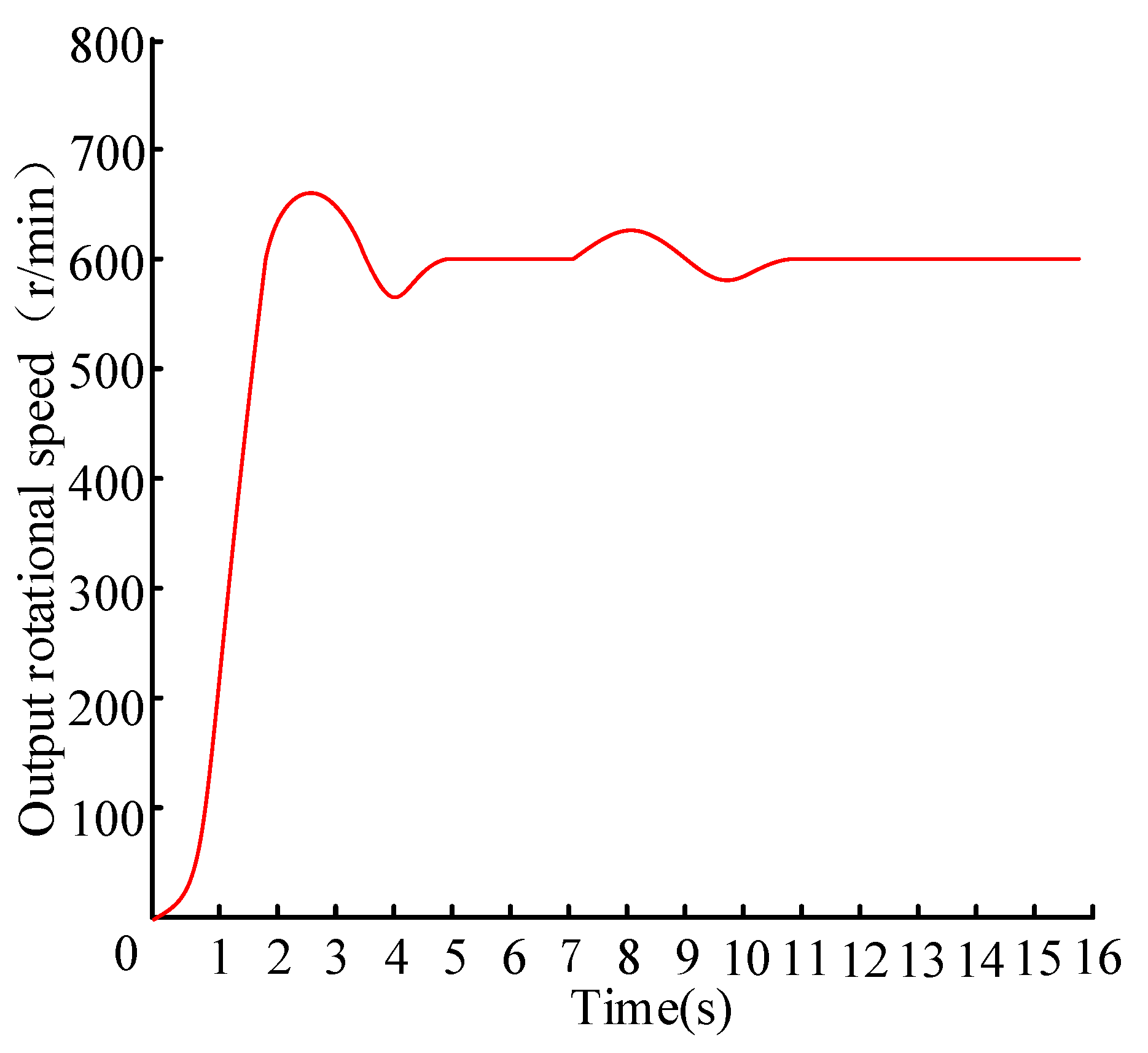
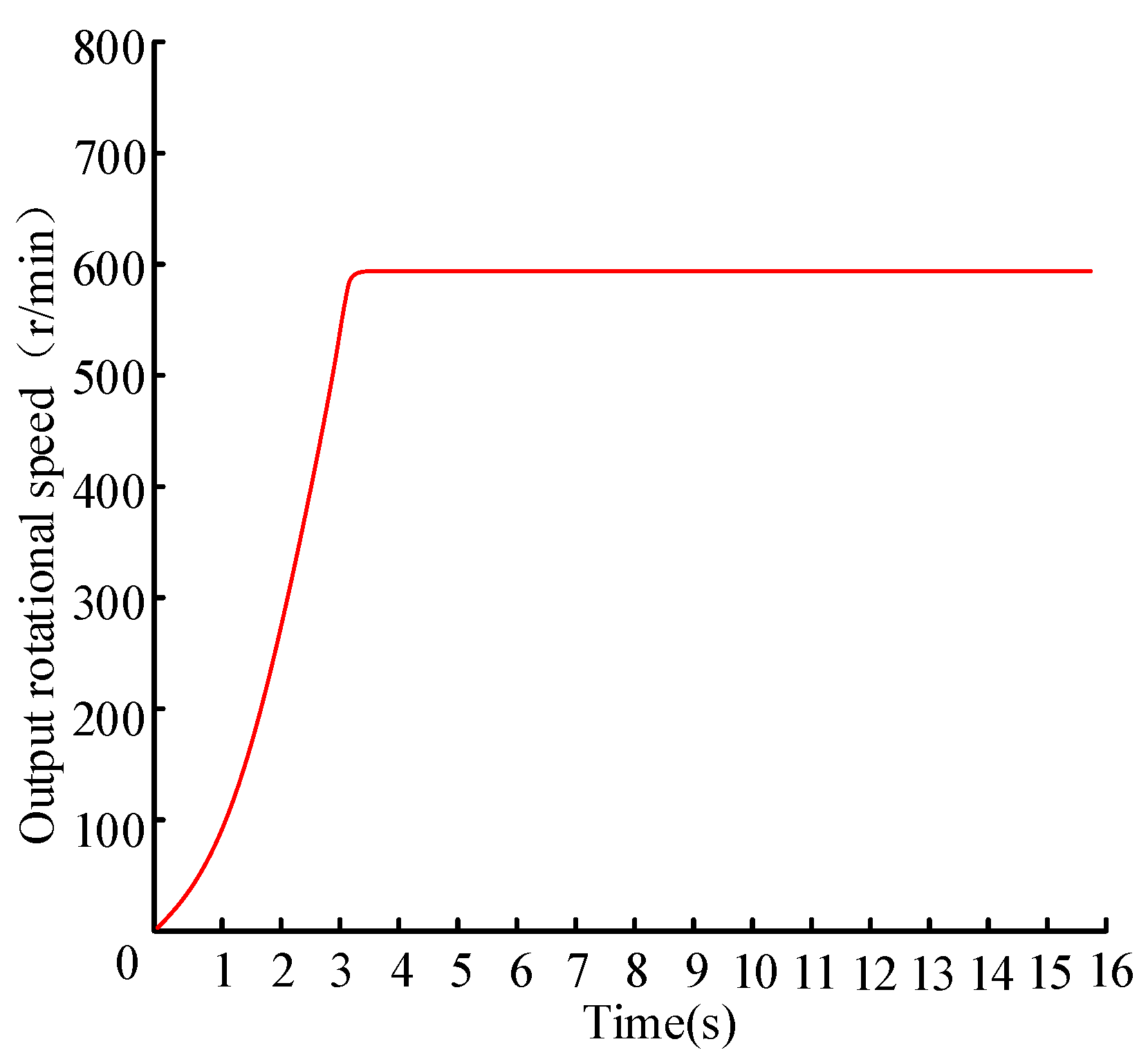
5.1. PMSC Speed Control System Simulation
5.2. P-ECHPS System Assist Characteristic Simulation
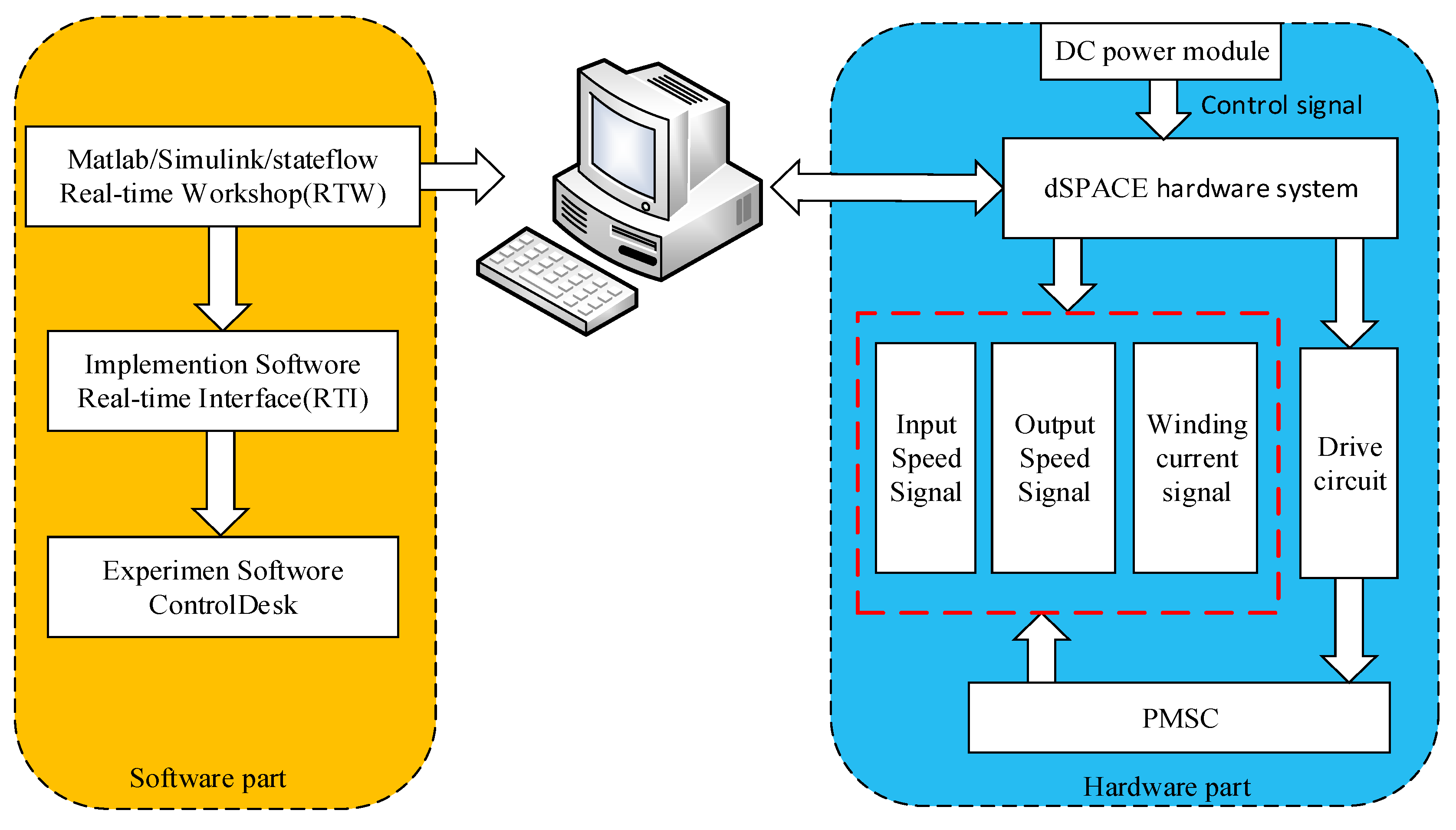
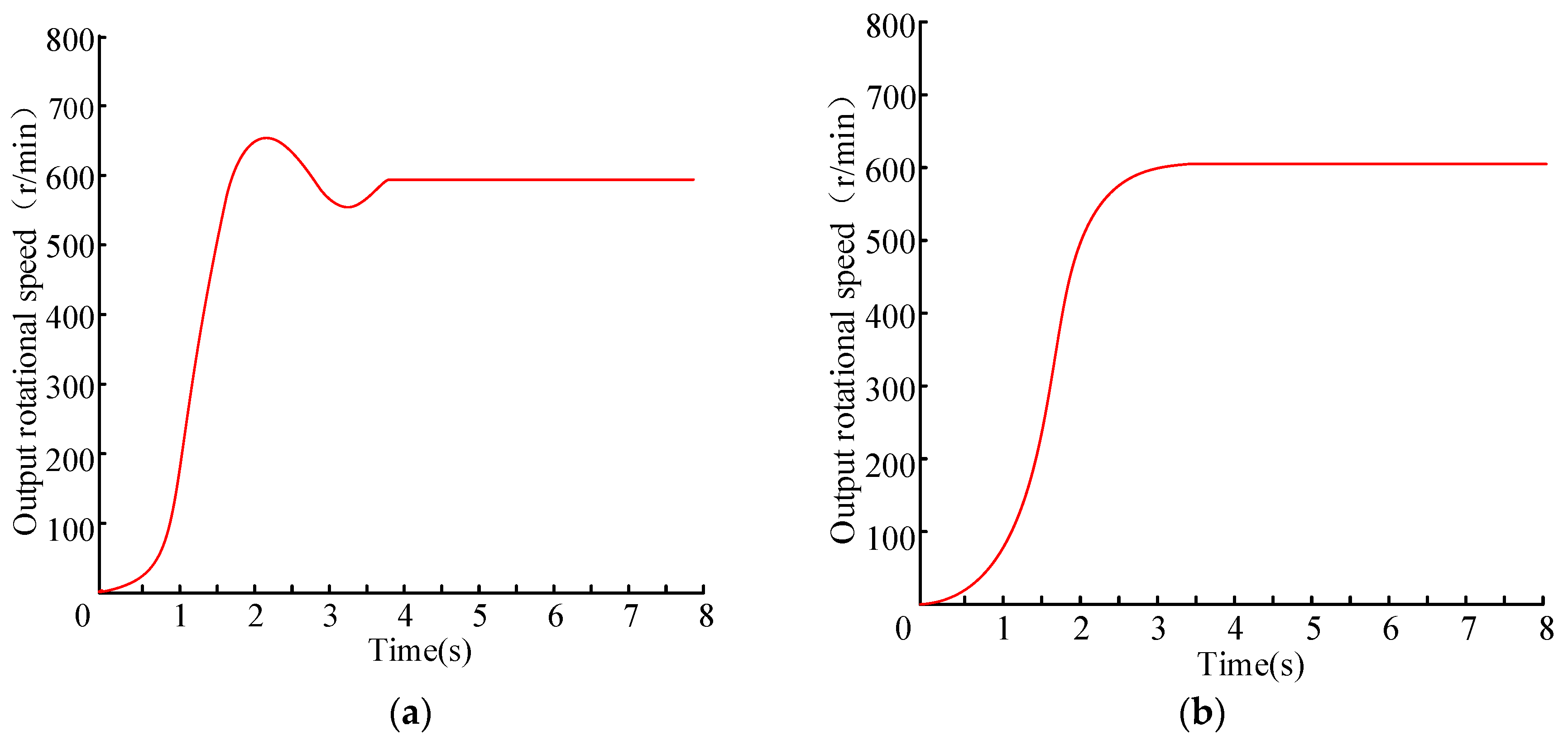
6. PMSC Rapid Control Prototype Test
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Baharom, M.B.; Hussain, K.; Day, A.J. Design of full electric power steering with enhanced performance over that of hydraulic power-assisted steering. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 390–399. [Google Scholar] [CrossRef]
- Kozuma, F.; Arita, T.; Tsuda, H. Development of energy saving power steering. Proc. JFPS Int. Symp. Fluid Power 2005, 2005, 297–300. [Google Scholar] [CrossRef][Green Version]
- Wolfgang, K.; Steffen, M.; Andreas, K. Mathematical modeling and nonlinear controller design for a novel electrohydraulic power-steering system. IEEE/ASME Trans. Mechatron. 2007, 12, 85–97. [Google Scholar]
- Murty, B.; Gopalakrishnan, S.; Namuduri, C.; Shoemaker, K. Magnetorheological coupling based hydraulic power steering: Low cost solution for fuel economy improvement. SAE Int. J. Passeng. Cars-Mech. Syst. 2009, 2, 219–228. [Google Scholar] [CrossRef]
- Wimmer, H.; Alsdorf, F. Modern front axle systems for city buses. ATZ Worldw. 2006, 108, 2–5. [Google Scholar] [CrossRef]
- Pawlak, A.M.; Graber, D.W.; Eckhardt, D.C. Magnetic power steering assist system-magnasteer. In 3rd Mobility. Technology Conference and Exhibit; SAE International: Warrendale, PA, USA, 1994. [Google Scholar]
- Zhang, K.M. Diagnosis and Detection of Electrically Controlled Power Steering System for Lingzhi Series Cars. Automot. Electr. Appl. 2004, 1, 36–37. [Google Scholar] [CrossRef]
- Xu, X.Y.; Lin, H. Integrated Position and Speed Design of Permanent Magnet Synchronous Motor Based on Dynamic Sliding Mode Control. TCES 2014, 29, 77–83. [Google Scholar] [CrossRef]
- Zak, M. Terminal Attractors in Neural Networks. Neural Netw. 1989, 2, 259–274. [Google Scholar] [CrossRef]
- Feng, Y.; Bao, W.; Yu, X.H. Design Method of Non-singular Terminal Sliding Mode Control System. Control Decis. 2002, 17, 194–198. [Google Scholar]
- Li, S.B.; Li, K.Q.; Wang, J.Q. Non-singular and Fast Terminal Sliding Mode Control Method. Inf. Control 2009, 38, 1–8. [Google Scholar]
- Li, H.; Dou, L.H.; Su, Z. Adaptive Non-singular fast terminal sliding mode control for electromechanical actuator. Int. J. Syst. Sci. 2013, 44, 401–415. [Google Scholar] [CrossRef]
- Zhao, L.; Jia, Y.M. Decentralized adaptive attitude synchronization control for spacecraft formation using Non-singular fast terminal sliding mode. Nonlinear Dyn. 2014, 78, 2779–2794. [Google Scholar] [CrossRef]
- Cheng, Y.; Lin, H. Non-singular fast terminal sliding mode position control of switched reluctance motor. J. Electr. Mach. Control 2012, 16, 78–82. [Google Scholar]
- Wang, W.B.; Su, H.S.; Zhang, X.C. Modeling and Simulation Analysis of Boost DC Converter Based on State Space Average Method. Electr. Drive Autom. 2013, 35, 29–32. [Google Scholar]
- Zhang, J.W.; Wang, B.S.; Wan, J. Analysis of Mechanical Characteristics of Chopper Cascade Speed Regulation System. Electr. Control Appl. 2010, 37, 25–29. [Google Scholar]
- Jiang, H.C.; Zhou, Z.L.; Qian, Y. Echps variable assist characteristics and control strategies for both maneuverability and energy conservation. J. Mech. Eng. 2015, 50, 17–26. [Google Scholar]
- Li, Z. Hydraulic Transmission; Mechanical Industry Press: Beijing, China, 2009. [Google Scholar]
- Ko, Y.E.; Song, C.K. Vehicle modeling with nonlinear tires for vehicle stability analysis. Int. J. Automot. Technol. 2010, 11, 339–344. [Google Scholar] [CrossRef]
- Jiang, H.B.; Tang, B.; Xu, Z.; Geng, G.Q. Electromagnetic and Torque Characteristics of Electromagnetic Slip Coupling Applied to Hydraulic Power Steering System for Heavy-Duty Vehicles. J. ASP. 2015, 12, 1069–1075. [Google Scholar]
- Wang, R.Q.; Zhou, Y.J.; Yin, P. Calculation of front wheel alignment and positive moment and steering force of automobile. J. Hunan Univ. Sci. Technol. 2010, 25, 42–46. [Google Scholar]
- Xia, J.; Hu, D.B. Research progress of terminal sliding mode control method. Chem. Autom. Instrum. 2011, 9, 1043–1047. [Google Scholar]
- Xiong, S.F.; Wang, W.H.; Wang, S. Nonsingular Fast Terminal Sliding Mode Guidance Law with Attack Angle Constraints. Control Theory Appl. 2014, 31, 269–278. [Google Scholar]
- Li, S.B.; Li, K.Q.; Wang, J.Q. Non-singular fast terminal sliding mode control method and its follow-up control application. Control Theory Appl. 2010, 27, 543–550. [Google Scholar]
- Zhang, X.G.; Zhao, K.; Sun, L. Mixed-non-singular terminal sliding mode variable structure control of permanent magnet synchronous motor. Proc. CSEE 2011, 31, 116–122. [Google Scholar]
- Geng, G.Q.; Miao, L.D.; Li, Q. According to the recommended values in reference Design Method of Electric Hydraulic Power Steering System. Res. Agric. Mech. 2006, 6, 207–210. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
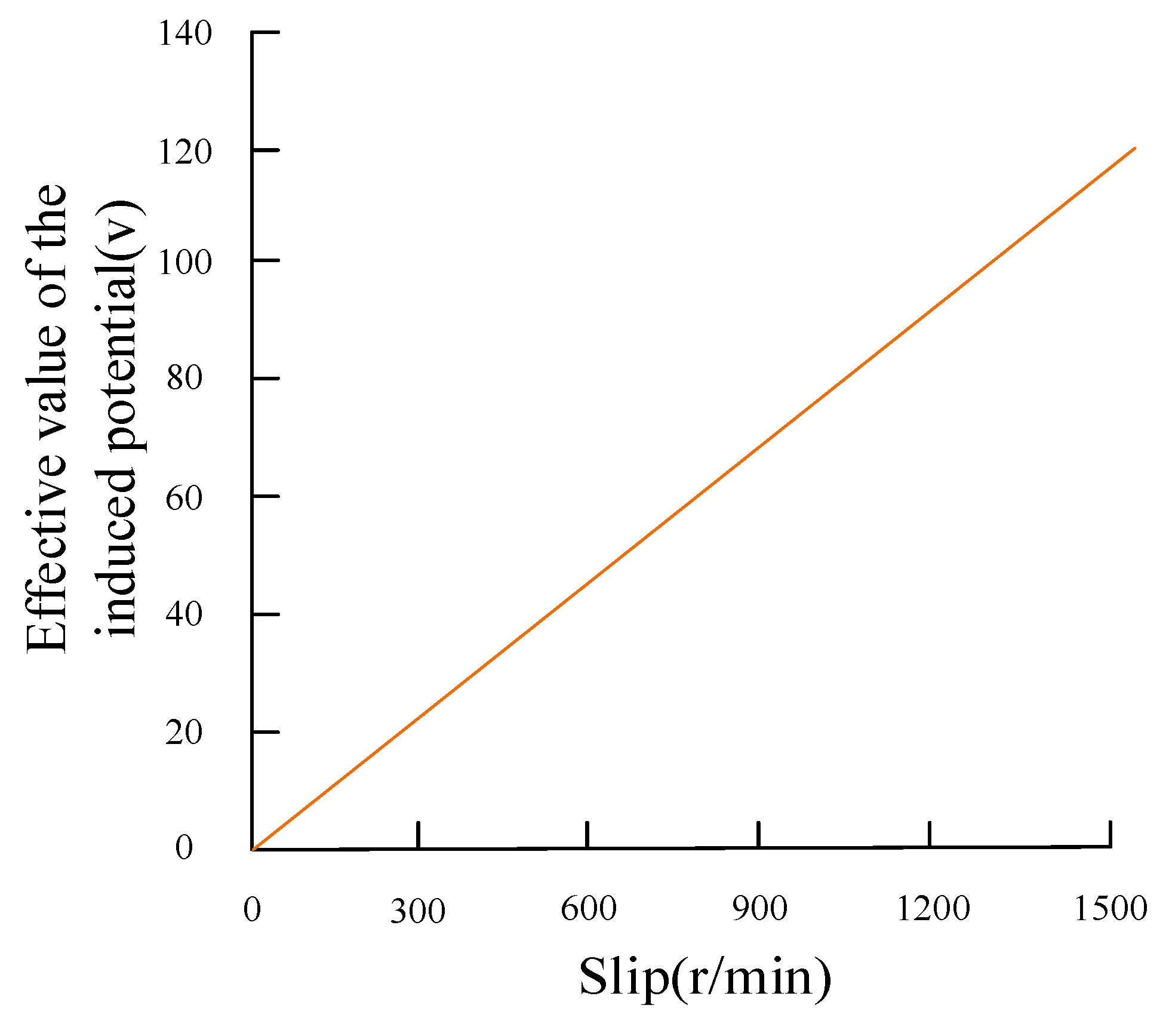
| Slip /r/min | 100 | 300 | 500 | 700 | 900 | 1100 | 1300 | 1500 |
| Induced Potential rms /v | 8.1 | 24.3 | 40.9 | 56.8 | 73.4 | 89.5 | 106.2 | 122.3 |
| Parameter | Numerical Value |
|---|---|
| Winding resistance R/Ω | 0.5 |
| Inductance Ld/H | 3 × 10−4 |
| Capacitance C/μF | 4 |
| Electromagnetic torque coefficient Cm | 1.82 |
| Inner rotor damping coefficient F2/Nm·s/rad | 0.02 |
| Inner rotor moment of inertia J2/kg·m2 | 8 × 10−3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geng, G.; Shen, Q.; Jiang, H. ANFTS Mode Control for an Electronically Controlled Hydraulic Power Steering System on a Permanent Magnet Slip Clutch. Energies 2019, 12, 1739. https://doi.org/10.3390/en12091739
Geng G, Shen Q, Jiang H. ANFTS Mode Control for an Electronically Controlled Hydraulic Power Steering System on a Permanent Magnet Slip Clutch. Energies. 2019; 12(9):1739. https://doi.org/10.3390/en12091739
Chicago/Turabian StyleGeng, Guoqing, Qingyuan Shen, and Haobin Jiang. 2019. "ANFTS Mode Control for an Electronically Controlled Hydraulic Power Steering System on a Permanent Magnet Slip Clutch" Energies 12, no. 9: 1739. https://doi.org/10.3390/en12091739
APA StyleGeng, G., Shen, Q., & Jiang, H. (2019). ANFTS Mode Control for an Electronically Controlled Hydraulic Power Steering System on a Permanent Magnet Slip Clutch. Energies, 12(9), 1739. https://doi.org/10.3390/en12091739