An Intelligent Lightning Warning System Based on Electromagnetic Field and Neural Network


Abstract
:1. Introduction
2. Detection of Electric and Magnetic Field
2.1. Electric Field Mill (EFM) Sensor
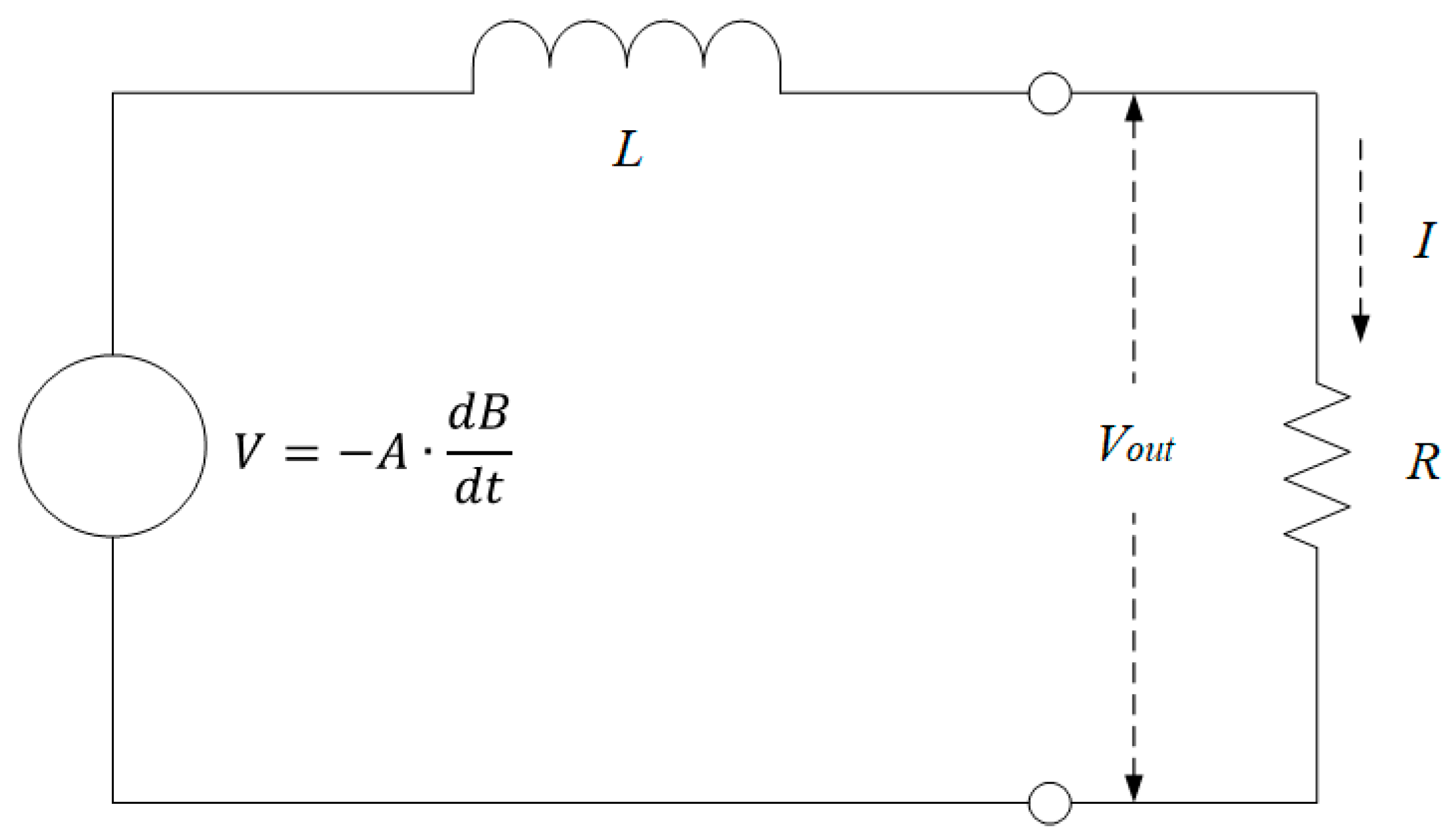
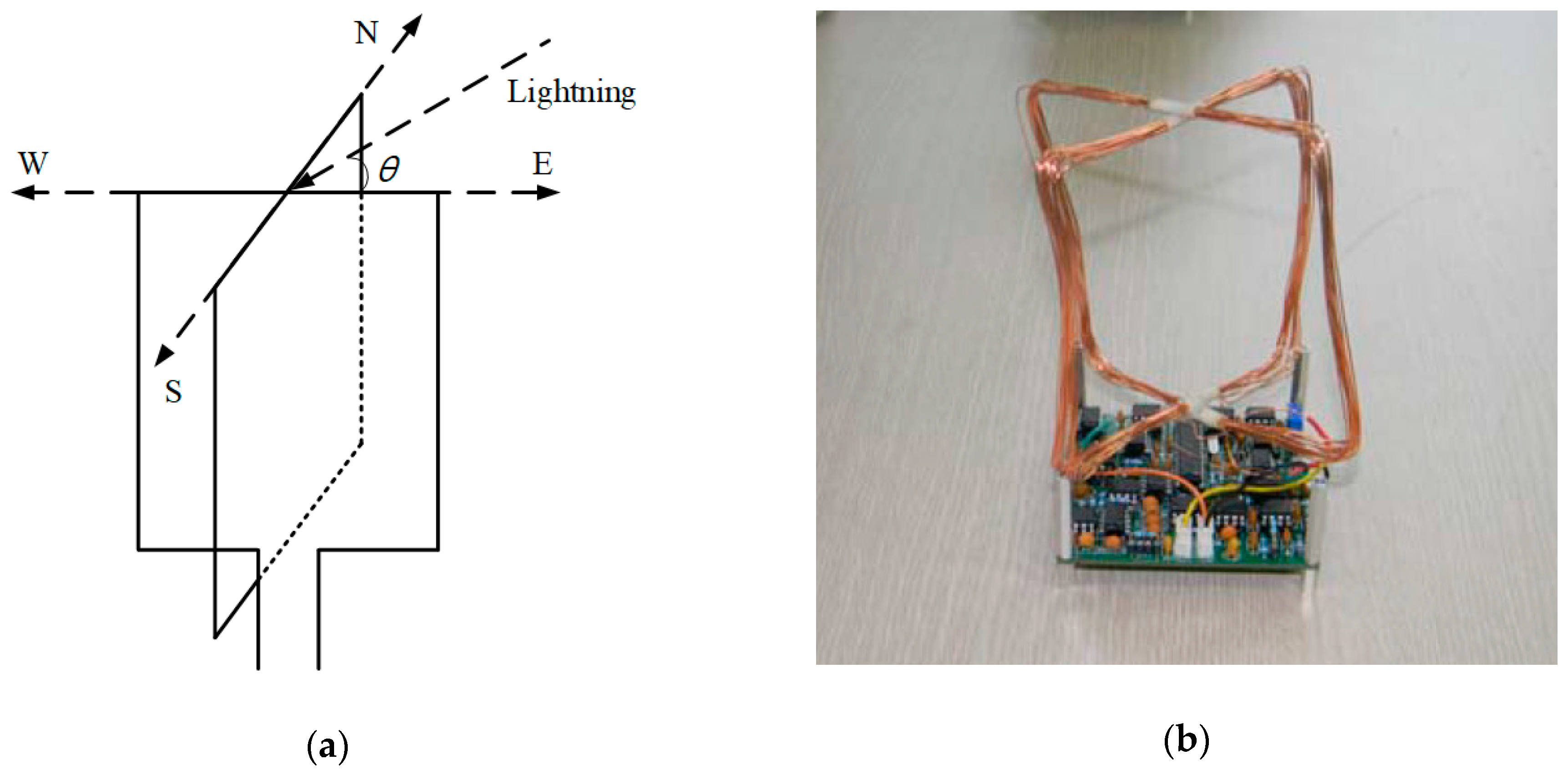
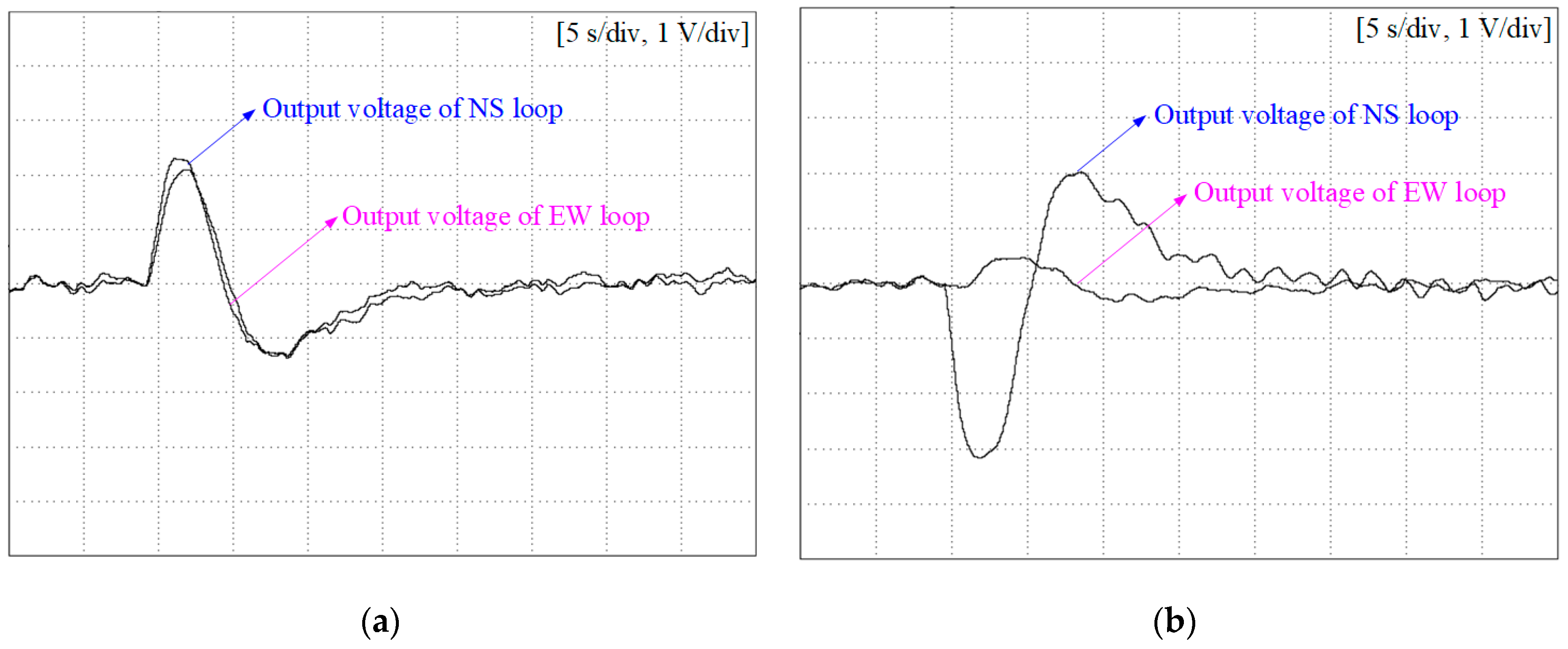
2.2. Loop Antenna
3. Intelligent Lightning Warning
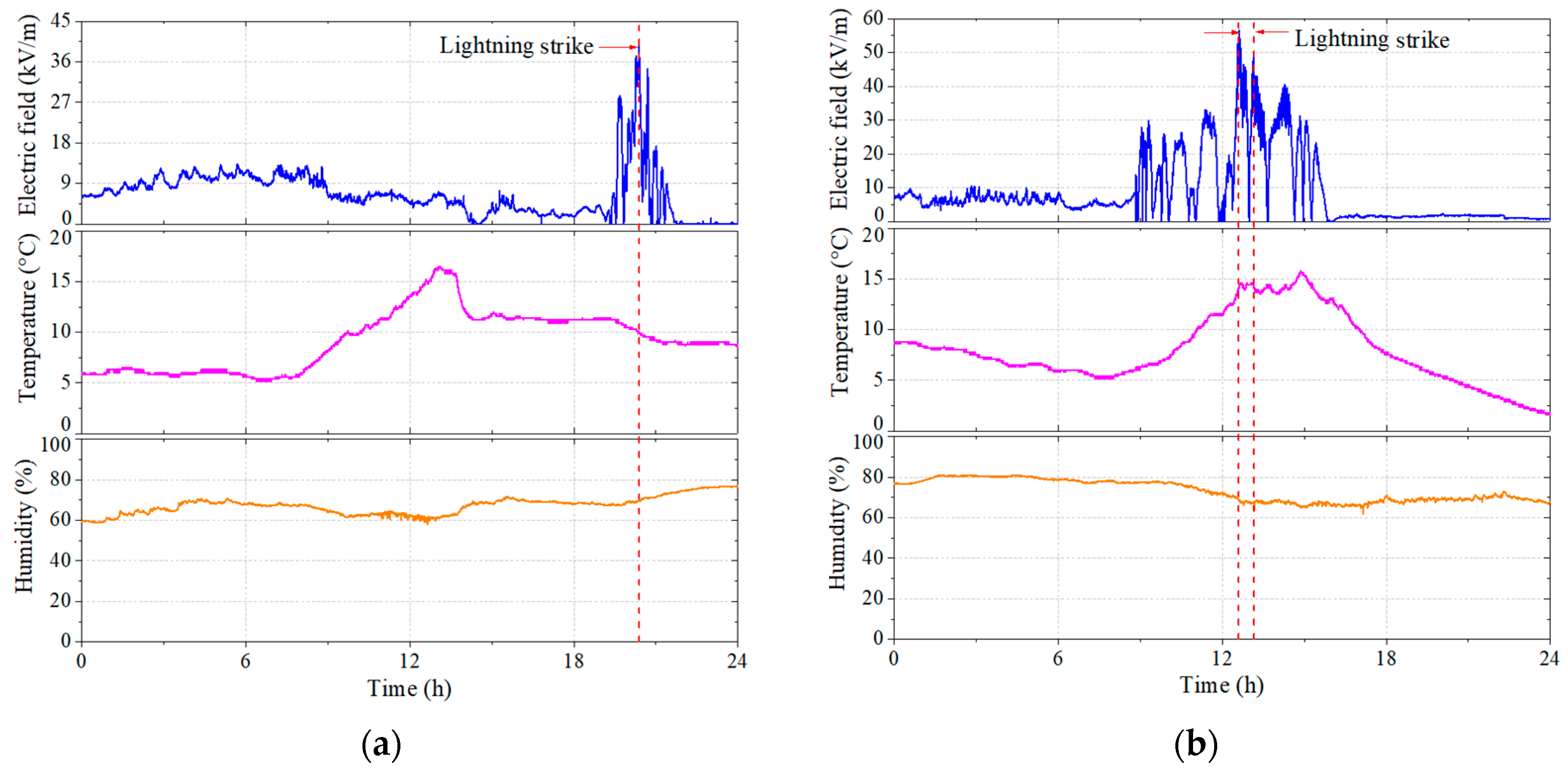
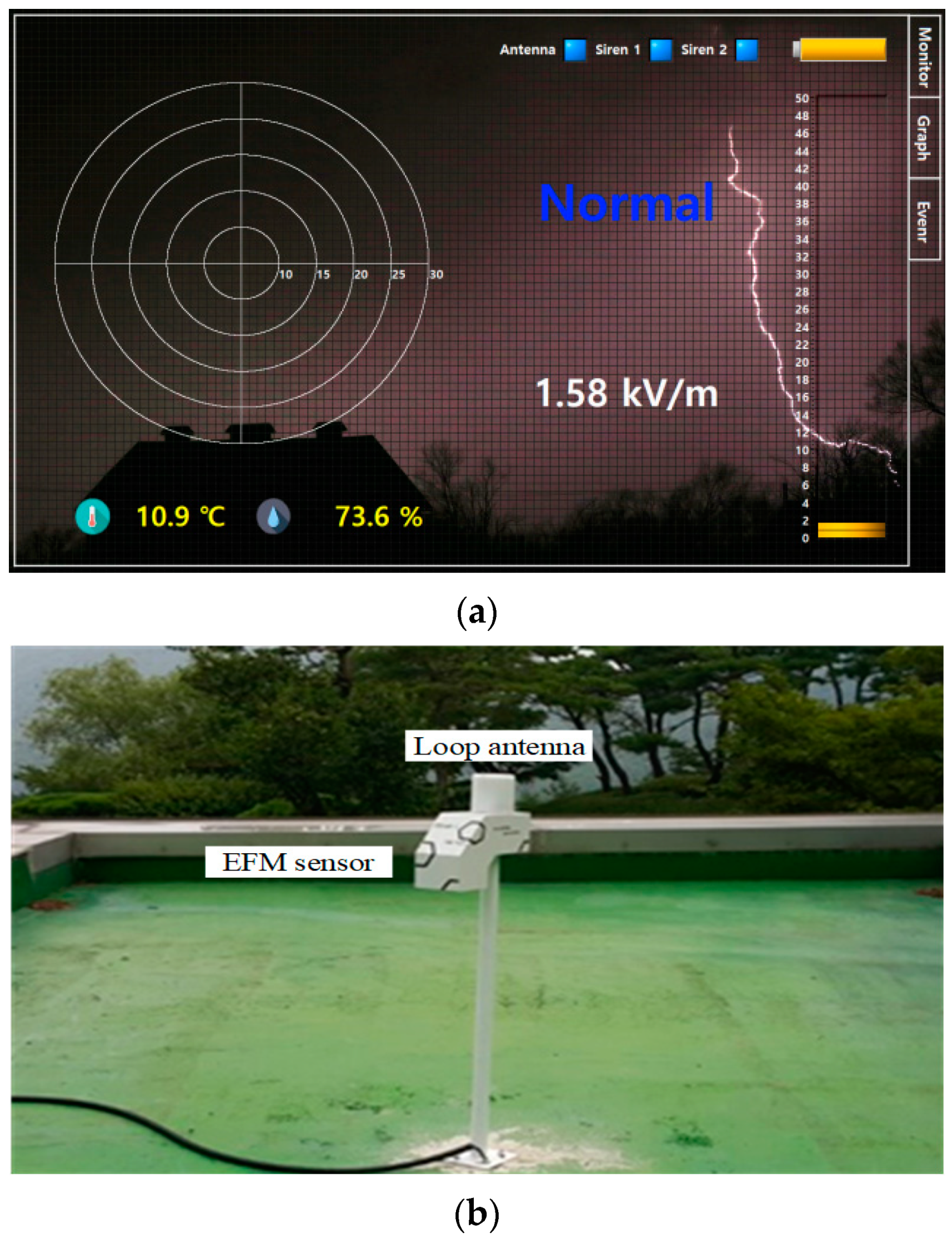
3.1. Data Acquisition
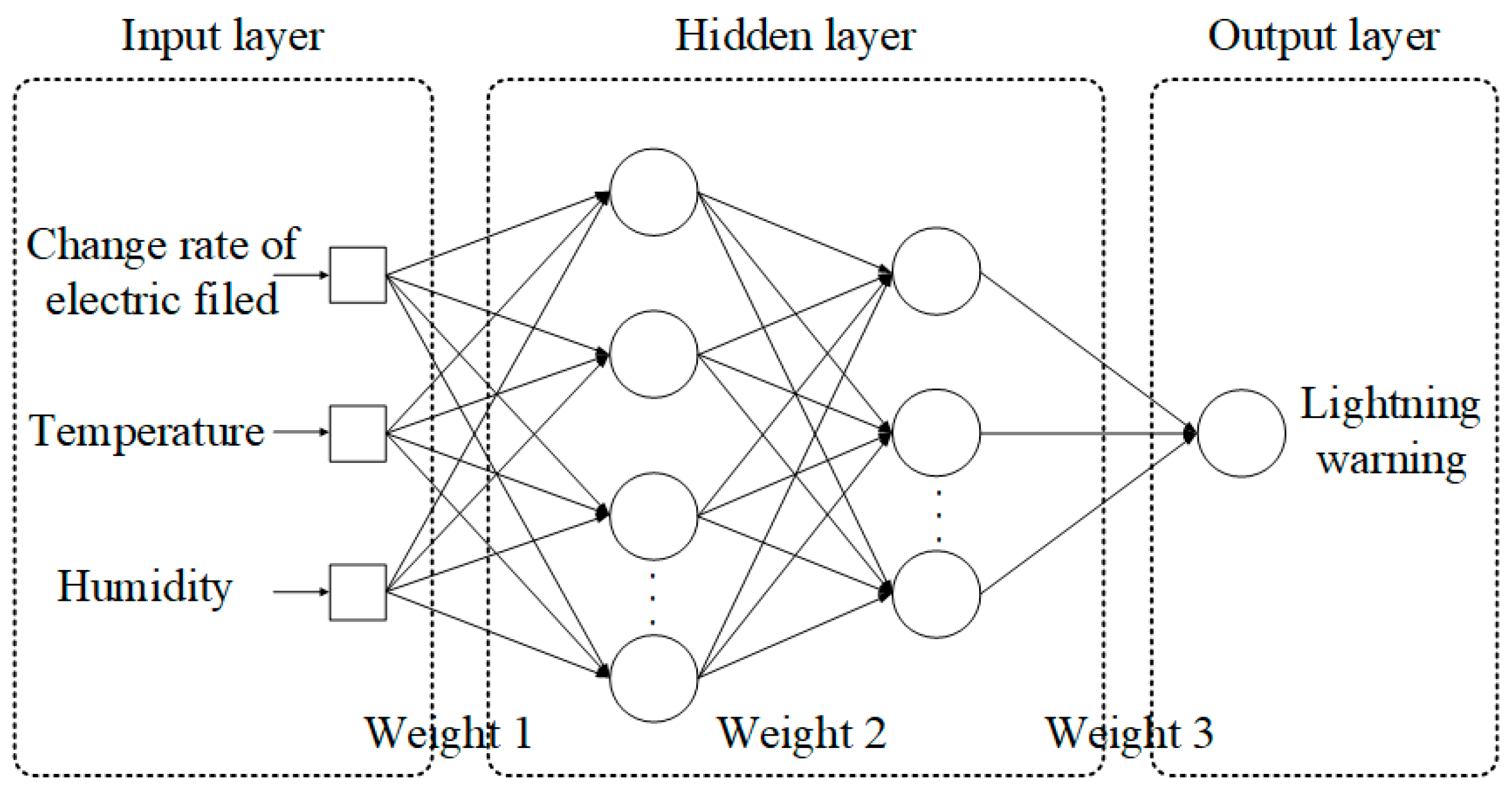
3.2. Artificial Neural Network (ANN)
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Haddad, A.; Warne, D.F. Advances in High Voltage Engineering, 1st ed.; The Institution of Engineering and Technology: London, UK, 2017; pp. 77–130. [Google Scholar] [CrossRef]
- Nur, H.Z.; Mohd, Z.A.A.K.; Mohd, A.M.R.; Mahdi, I.; Norhafiz, A.; Nor, I.A.; Mohd, S.M.N. Lightning surge analysis on a large scale grid-connected solar photovoltaic system. Energies 2017, 10, 2149. [Google Scholar] [CrossRef]
- Andreotti, A.; Mottola, F.; Pierno, A.; Proto, D. On the statistical characterization of lightning-induced voltages. Appl. Sci. 2018, 8, 651. [Google Scholar] [CrossRef]
- David, M.R.; Jacob, T.S.; David, V.; John, M. Projected increase in lightning strikes in the United States due to global warming. Science 2014, 346, 851–854. [Google Scholar] [CrossRef]
- Colin, P.; David, R. Possible implications of global climate change on global lightning distributions and frequencies. J. Geophys. Res. Atmos. 1994, 99, 10823–10831. [Google Scholar] [CrossRef]
- Lightning Report; Weather Radar Center of Korea Meteorological Administration: Seoul, Korea, 2018.
- Muhammad, A.B.S.; Hamizah, B.S.; Zainal, S.; Zokafle, B.; Zainuddin, N.; Hussein, A.; Muhammad, I.J.; Yanuar, Z.A. Lightning monitoring system for sustainable energy supply: A review. Renew. Sustain. Energy Rev. 2015, 48, 710–725. [Google Scholar] [CrossRef]
- Ibrahim, W.I.; Ghazali, M.R. Measurements of Electric and Magnetic Fields due to Lightning Strokes Based on Single-station Detection. In Proceedings of the IEEE Asia-Pacific Conference on Applied Electromagnetics, Melaka, Malaysia, 11 December 2012; pp. 268–273. [Google Scholar] [CrossRef]
- Adonis, F.R.L.; Vladimir, A.R.; Jose, P.F.; Brigida, R.P.R.; Manh, D.T. A low-cost system for measuring lightning electric field waveforms, its calibration and application to remote measurements of currents. IEEE Trans. Electromagn. Compat. 2018, 60, 414–422. [Google Scholar] [CrossRef]
- Rakov, V.A. Electromagnetic methods of lightning detection. Surv. Geophys. 2013, 34, 731–753. [Google Scholar] [CrossRef]
- Jelena, D.; Valdas, J.; Eleonora, G.; Lukas, G.; Tahir, C.A. Effects of Weather Conditions on Electromagnetic Field Parameters. In Proceedings of the International Conference on Ecological Vehicles and Renewable Energies, Monte Carlo, Monaco, 31 March 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Salam, M.A. Influence of humidity on charge density and electric field in electrostatic precipitators. J. Phys. D Appl. Phys. 1992, 25, 1318–1322. [Google Scholar] [CrossRef]
- Leena, H.K.; Harri, A.K.; Hiroo, T.; Jarmo, A.E. Influence of relative humidity on analyzing electric field exposure using ELF electric field measurements. Bioelectromagnetics 2013, 34, 414–418. [Google Scholar] [CrossRef]
- Cui, Y.; Yuan, H.; Song, X.; Zhao, L.; Liu, Y.; Lin, L. Model, design, and testing of field mill sensors for measuring electric fields under high-voltage direct-current power lines. IEEE Trans. Ind. Electron. 2018, 65, 608–615. [Google Scholar] [CrossRef]
- Martin, A.U. Lightning, 2nd ed.; Dover Publication Inc.: New York, NY, USA, 1984; pp. 47–113. [Google Scholar]
- Vladimir, A.R.; Martin, A.U. Review and evaluation of lightning return stroke models including some aspects of their application. IEEE Trans. Electromagn. Compat. 1998, 40, 403–426. [Google Scholar] [CrossRef]
- Kuo, P.H.; Huang, C.Y. A green energy application in energy management systems by an artificial intelligence-based solar radiation forecasting model. Energies 2018, 11, 819. [Google Scholar] [CrossRef]
- Zhang, G.; Patuwo, B.E.; Hu, M.Y. Forecasting with artificial neural networks: The state of the art. Int. J. Forecast. 1998, 14, 35–62. [Google Scholar] [CrossRef]
- Wang, G.M.; Kil, G.S. Measurement and analysis of partial discharge using an ultra-high frequency sensor for gas insulated structures. Metrol. Meas. Syst. 2017, 24, 515–524. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Existing Method | Proposed Method | ||||
|---|---|---|---|---|---|---|
| Electric Field (kV/m) | Accurately Predict | Change of Electric Field (kV/m) | Temperature (°C) | Humidity (%) | Accurately Predict | |
| 1 | 52.05 | Yes | 4.19 | 6.5 | 84.8 | Yes |
| 2 | 42.36 | No | 6.74 | 10.3 | 72.8 | Yes |
| 3 | 58.45 | No | 4.54 | 14.4 | 68.4 | Yes |
| 4 | 72.11 | Yes | 3.66 | 7.5 | 83.5 | Yes |
| 5 | 66.13 | Yes | 5.63 | 7.7 | 83.2 | Yes |
| 6 | 46.45 | No | 3.24 | 10.5 | 78.8 | Yes |
| 7 | 58.99 | Yes | 1.09 | 7.1 | 88.9 | Yes |
| 8 | 49.97 | No | 0.97 | 7.1 | 88.9 | Yes |
| 9 | 64.14 | Yes | 3.22 | 12.0 | 78.9 | Yes |
| 10 | 51.07 | Yes | 2.27 | 9.5 | 76.8 | Yes |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Kim, W.-H.; Kil, G.-S.; Park, D.-W.; Kim, S.-W. An Intelligent Lightning Warning System Based on Electromagnetic Field and Neural Network. Energies 2019, 12, 1275. https://doi.org/10.3390/en12071275
Wang G, Kim W-H, Kil G-S, Park D-W, Kim S-W. An Intelligent Lightning Warning System Based on Electromagnetic Field and Neural Network. Energies. 2019; 12(7):1275. https://doi.org/10.3390/en12071275
Chicago/Turabian StyleWang, Guoming, Woo-Hyun Kim, Gyung-Suk Kil, Dae-Won Park, and Sung-Wook Kim. 2019. "An Intelligent Lightning Warning System Based on Electromagnetic Field and Neural Network" Energies 12, no. 7: 1275. https://doi.org/10.3390/en12071275
APA StyleWang, G., Kim, W.-H., Kil, G.-S., Park, D.-W., & Kim, S.-W. (2019). An Intelligent Lightning Warning System Based on Electromagnetic Field and Neural Network. Energies, 12(7), 1275. https://doi.org/10.3390/en12071275