Experimental Research of Transmissions on Electric Vehicles’ Energy Consumption


 and
and 
Abstract
1. Introduction
2. Experimental Set-Up
2.1. Vehicle Specifications
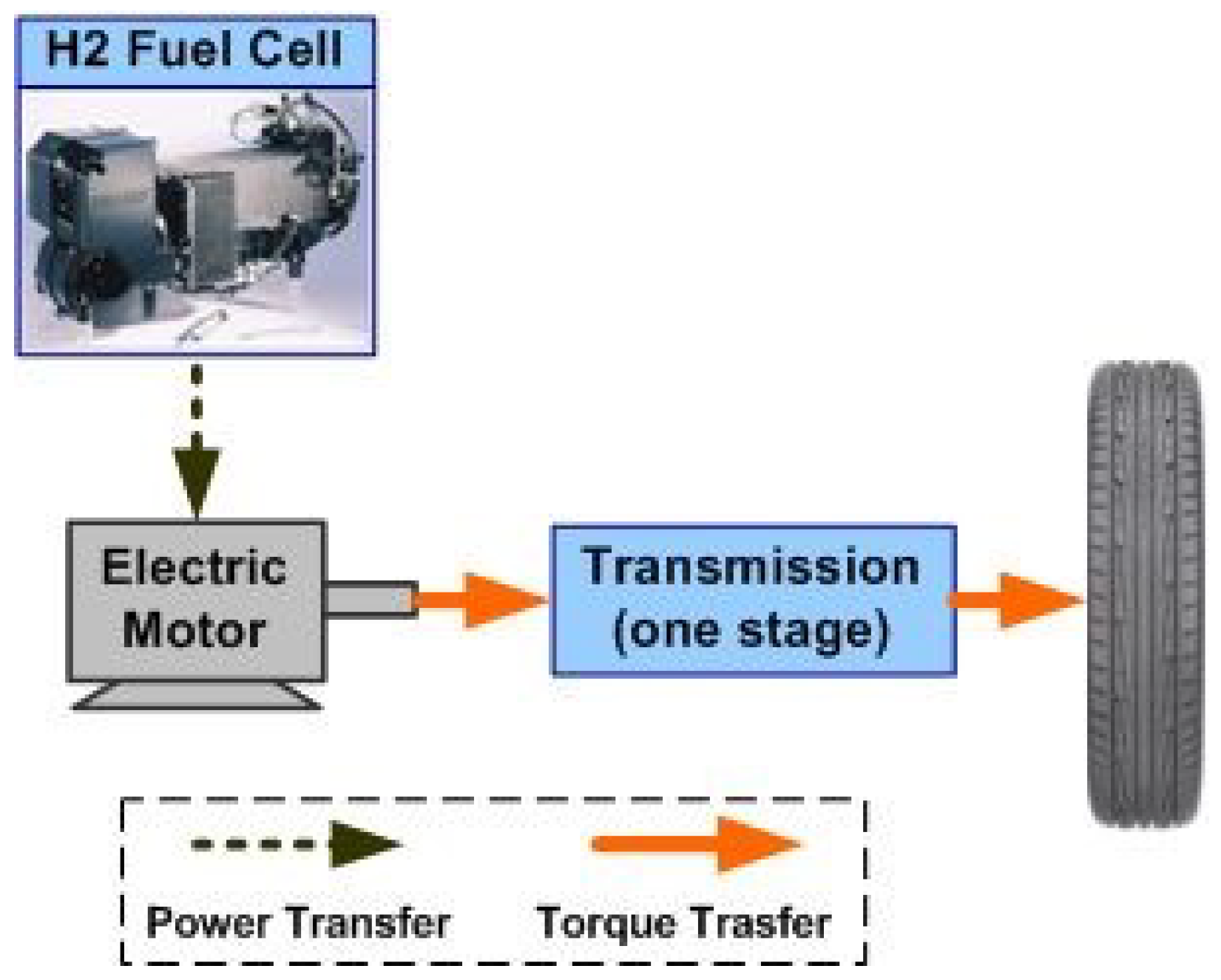
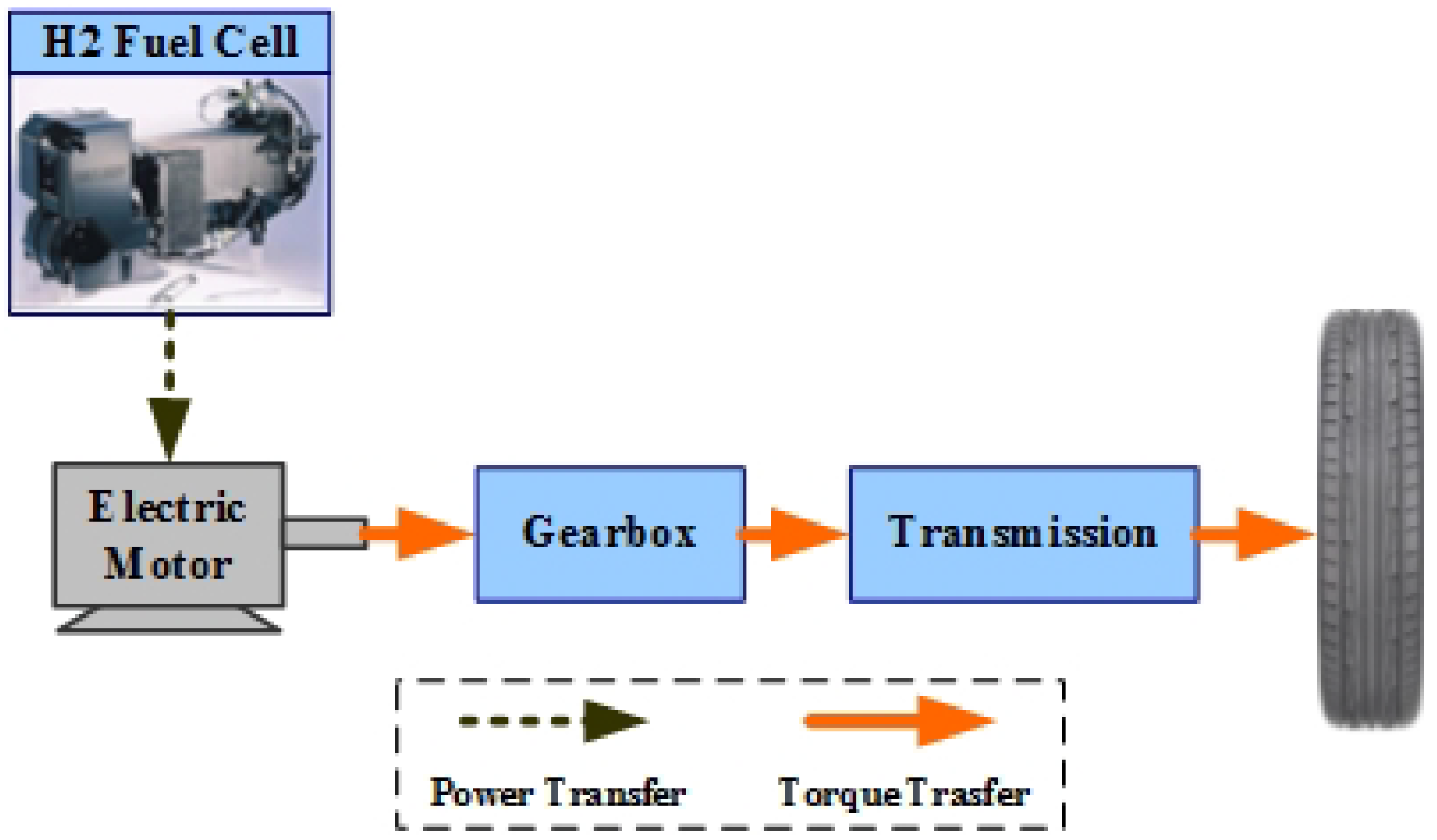
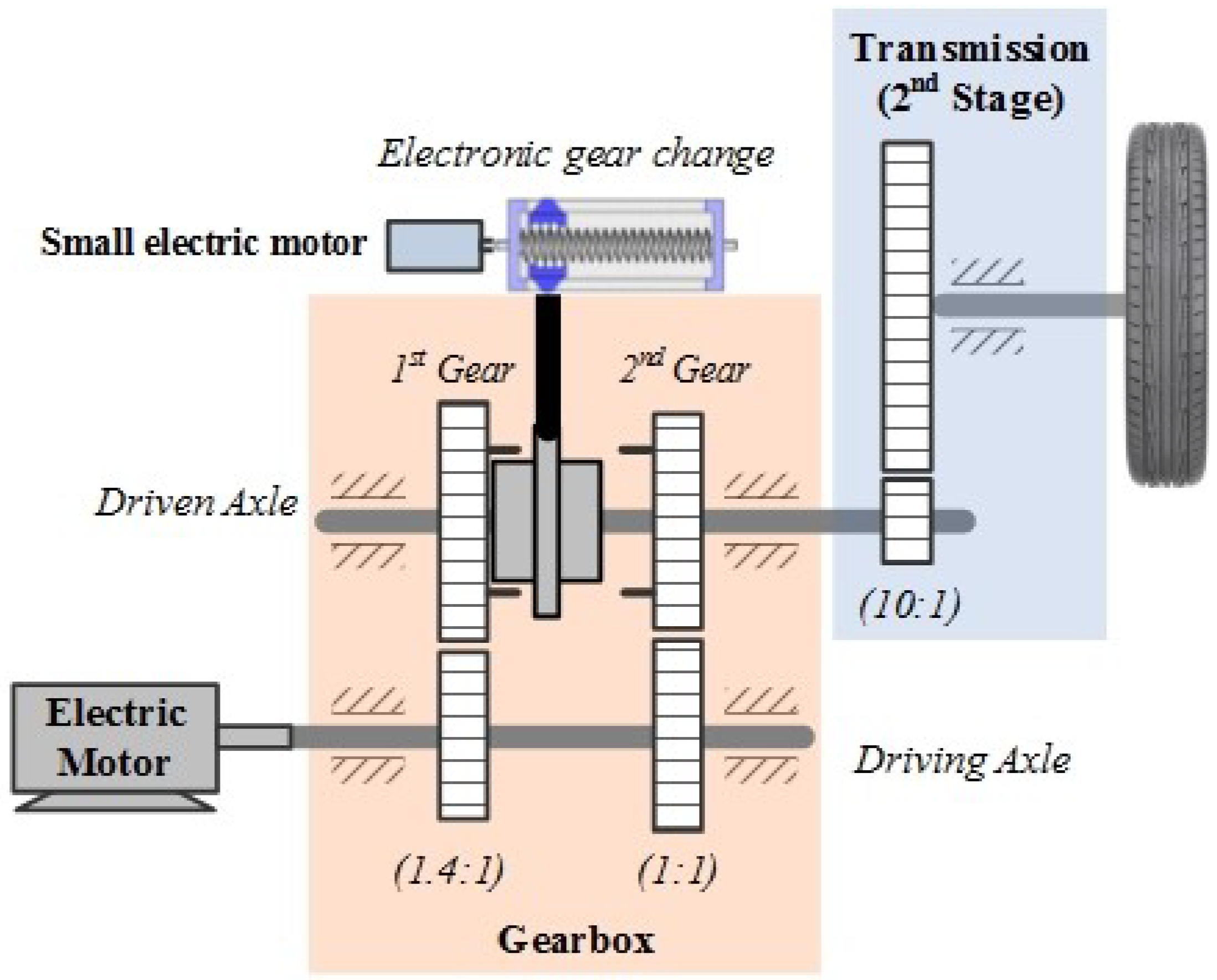
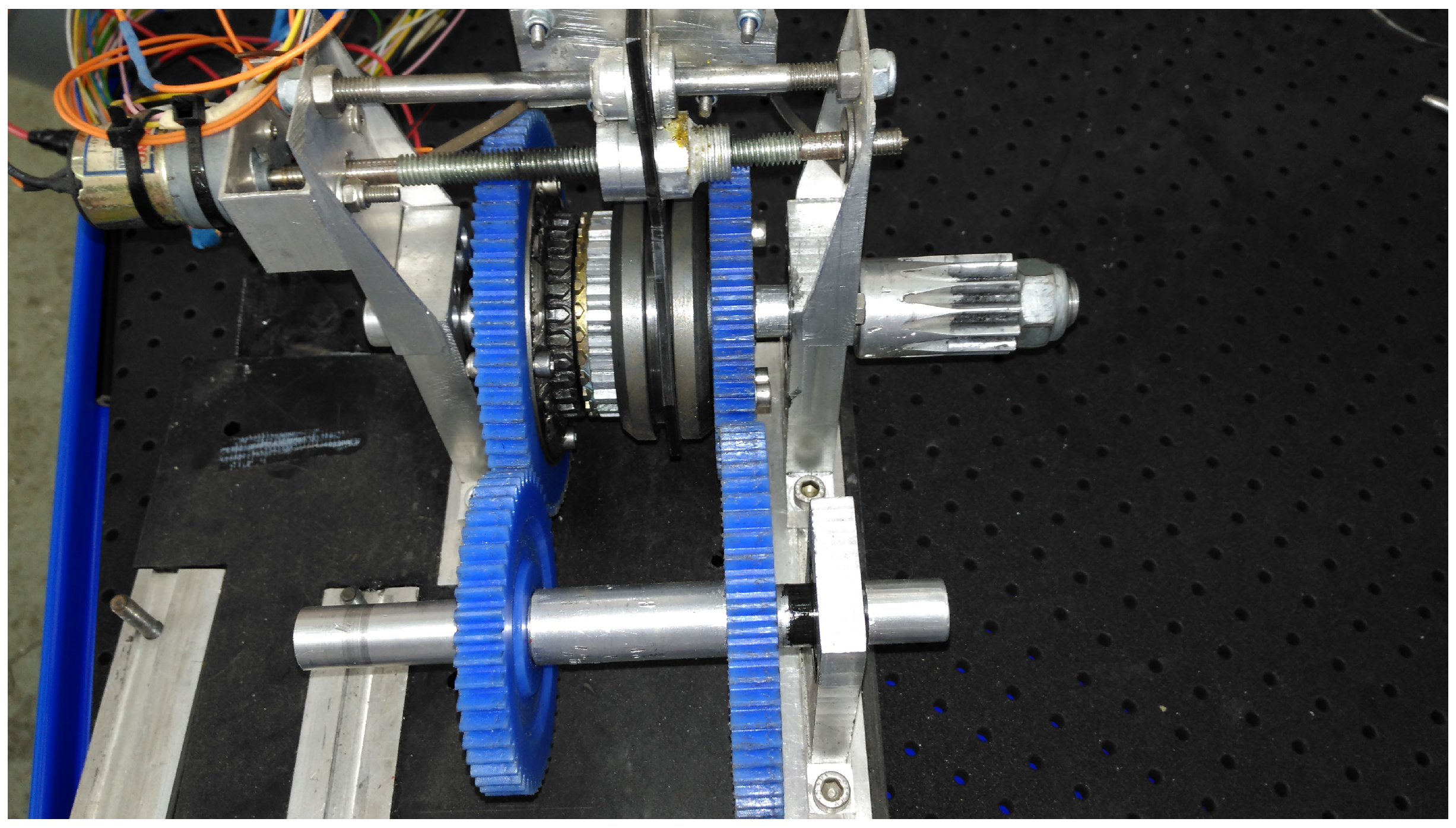
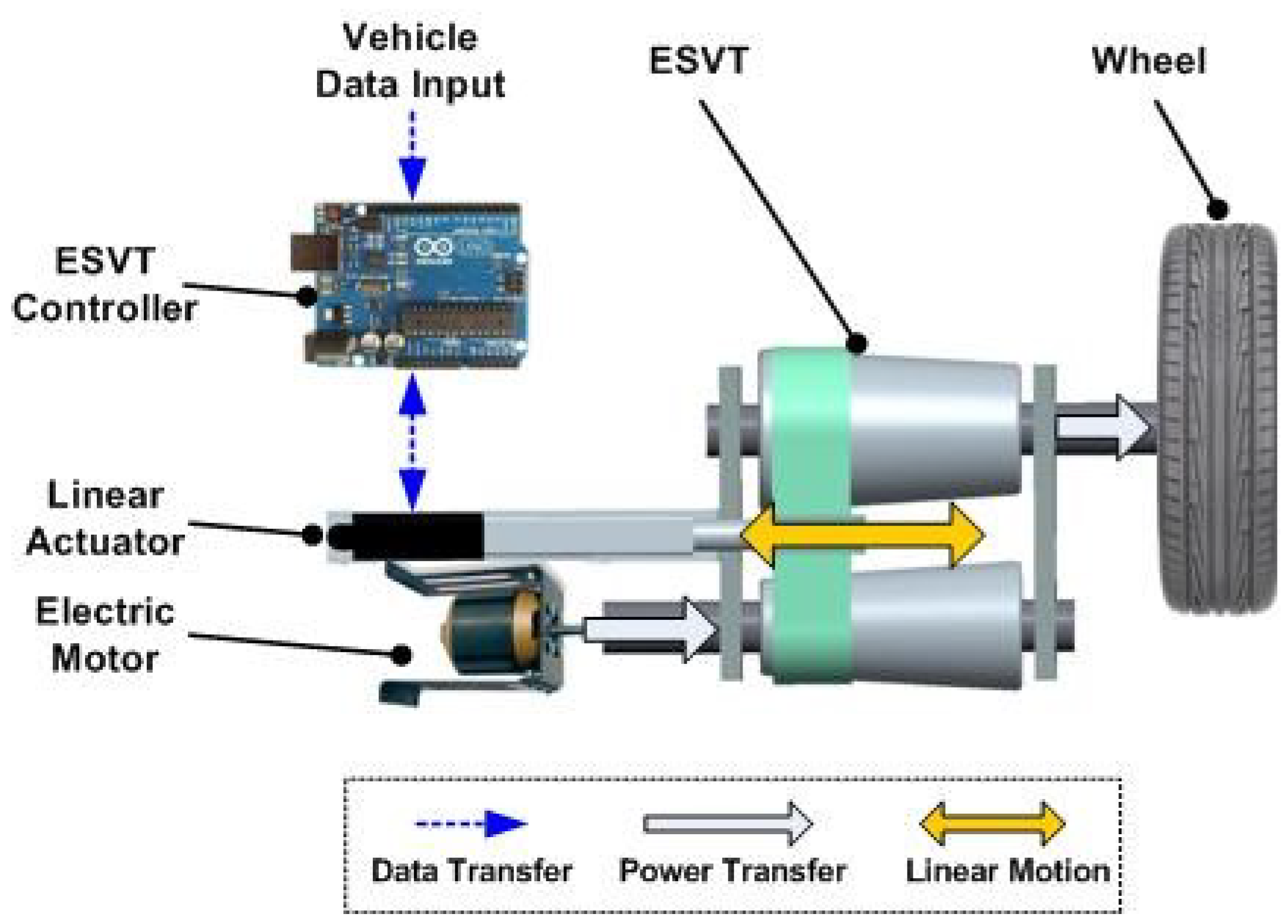
2.2. Powertrain and Drivetrain Setup
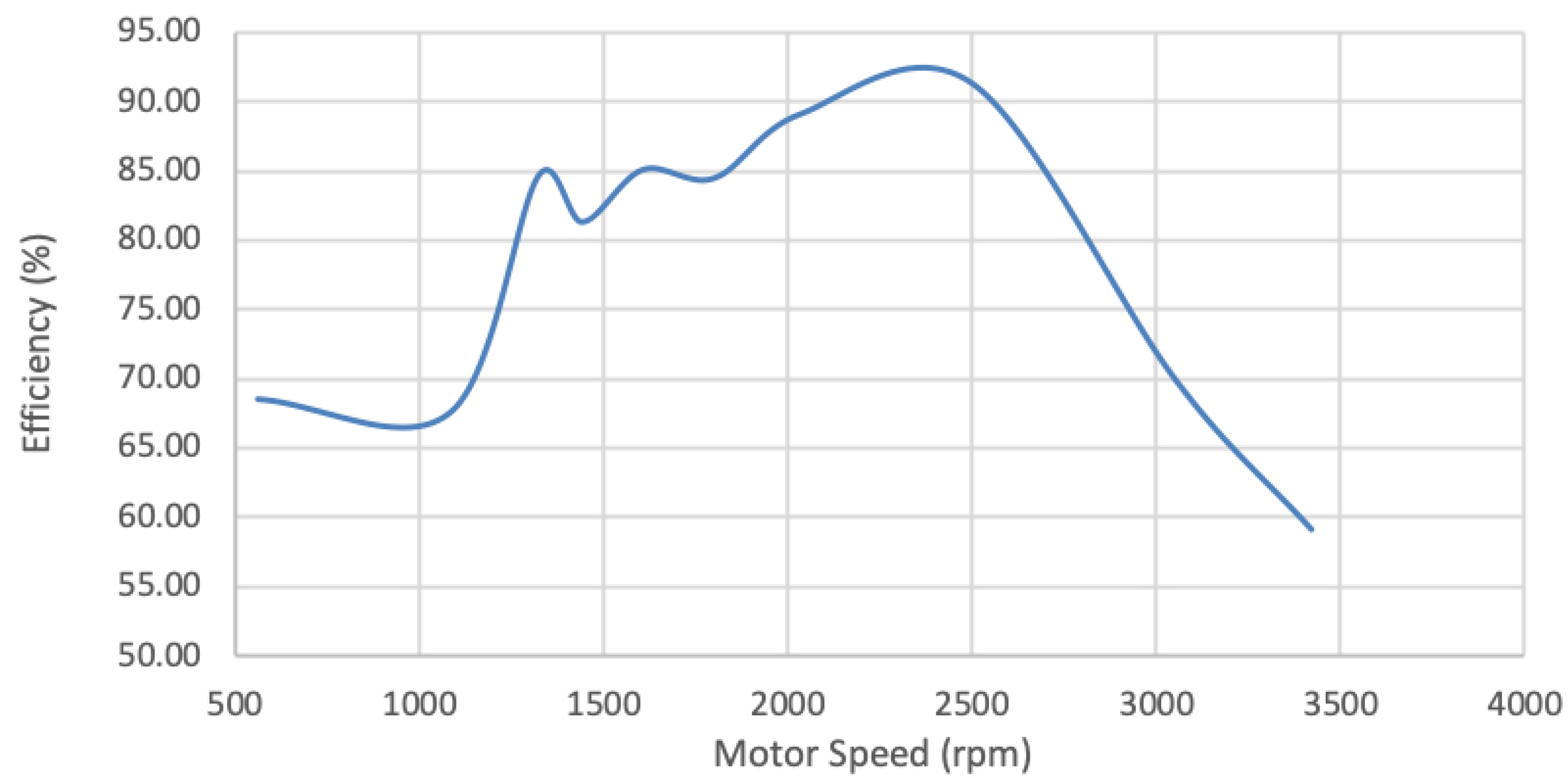
- Output data from the torque transducer (Motor speed (rpm), Torque (Nm) and Power (Kw)).
- Input data from the power measurements in the input of the electric motor.
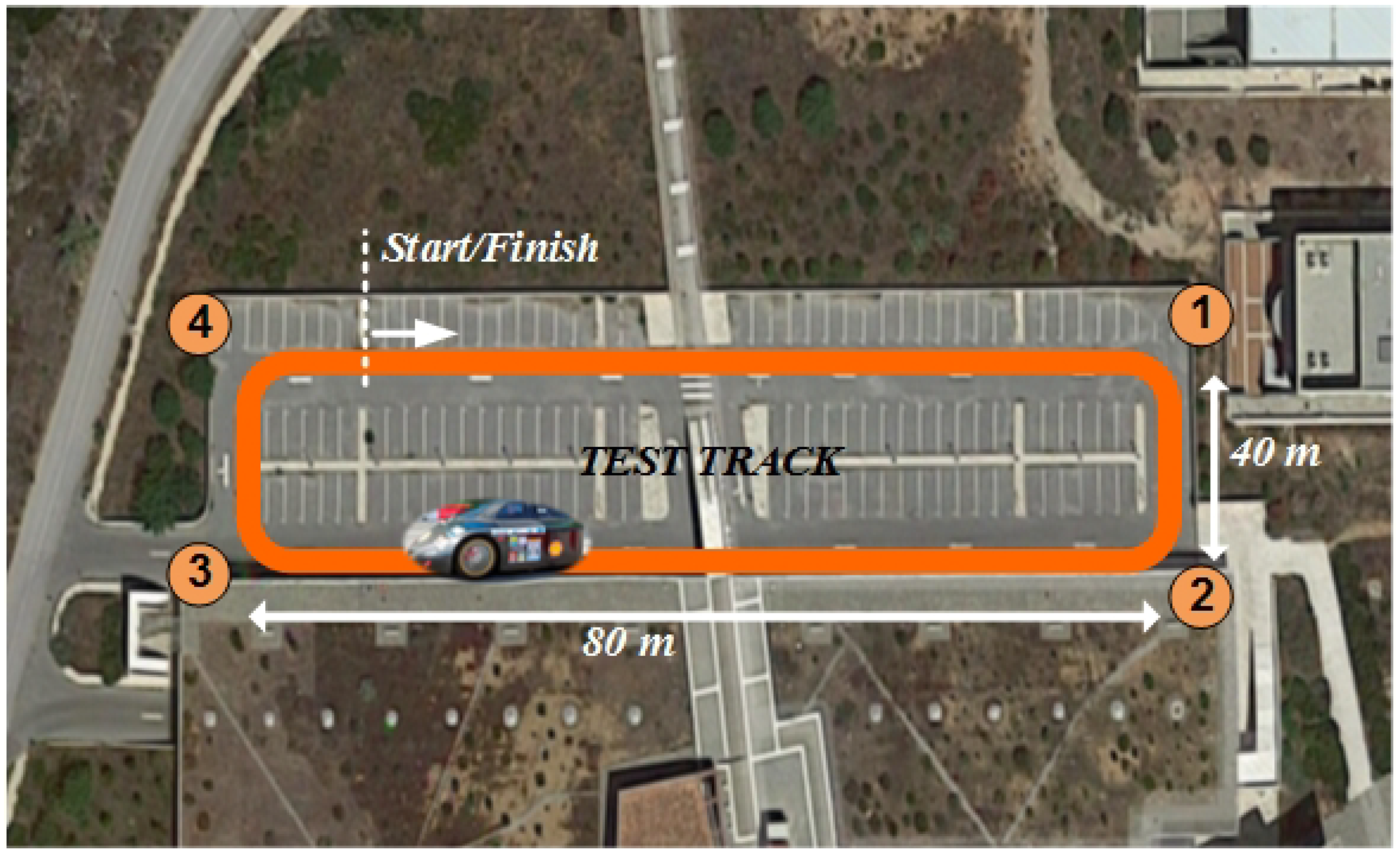
2.3. On Road Experimental Setup
- Speed limits are set for the first time the car passes from corners (1) and (2), set at 15–17 Km/h. The driver tries to follow this rule at almost constant acceleration.
- Above 22 km/h the vehicle increased its velocity using full throttle, which results in higher energy consumption, without actual interference from the driver.
- Total time to complete the two laps is set to a margin of 79–83 s with a max speed of 30 Km/h. Driver cannot brake to increase lap time but can stop pushing the throttle while cornering in order to adjust his lap timeframe.
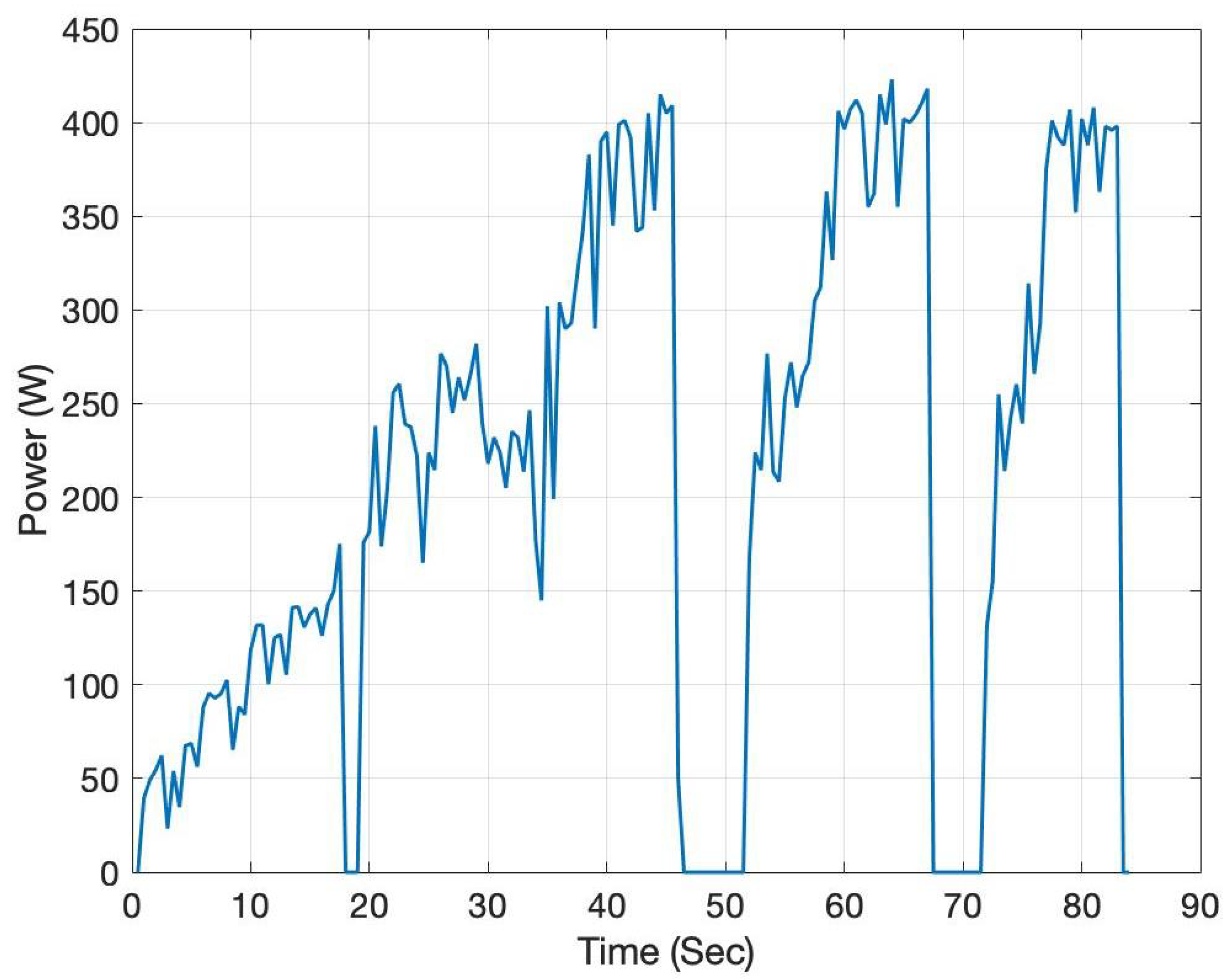
2.4. Data Recording
3. On Road Testing and Results
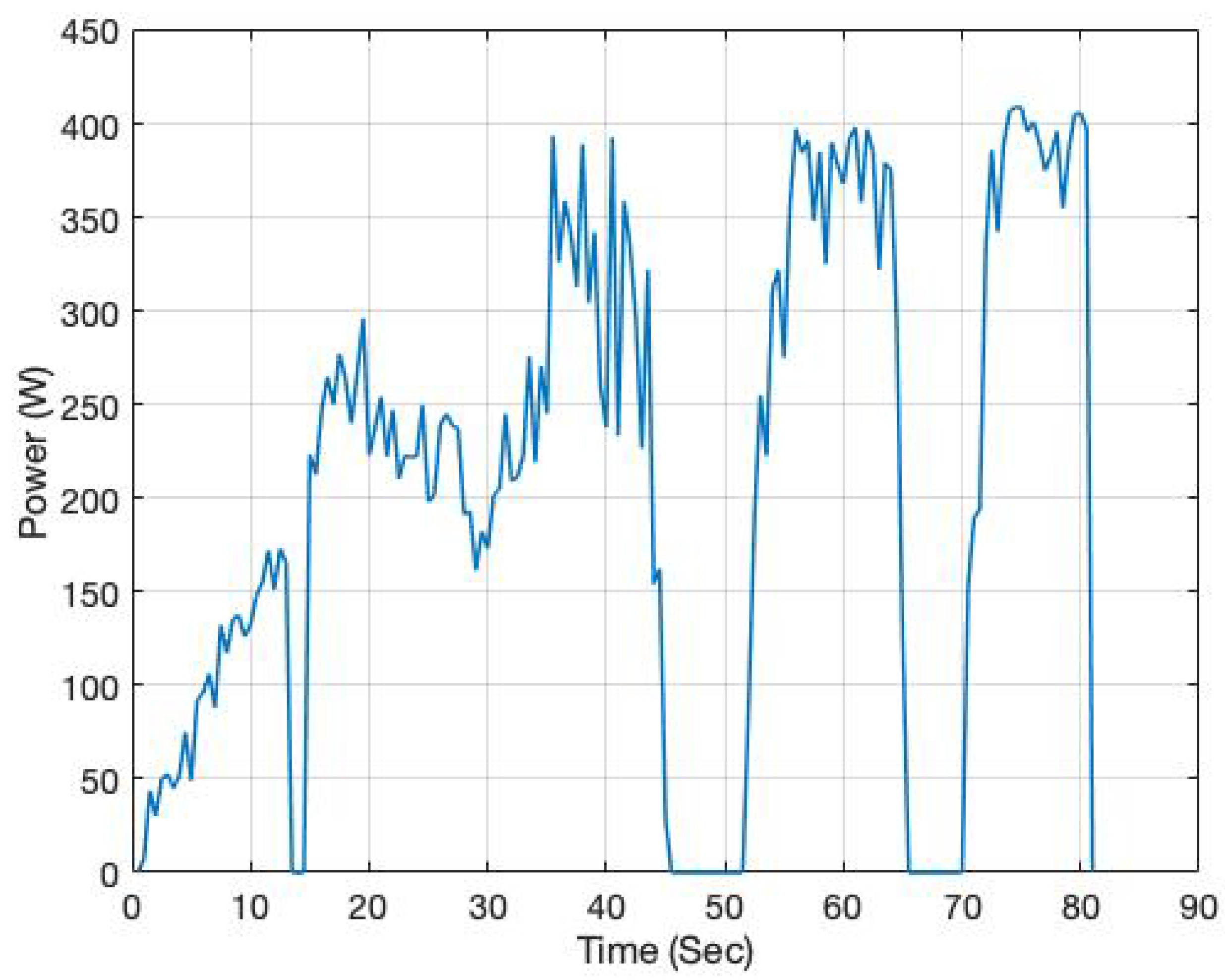
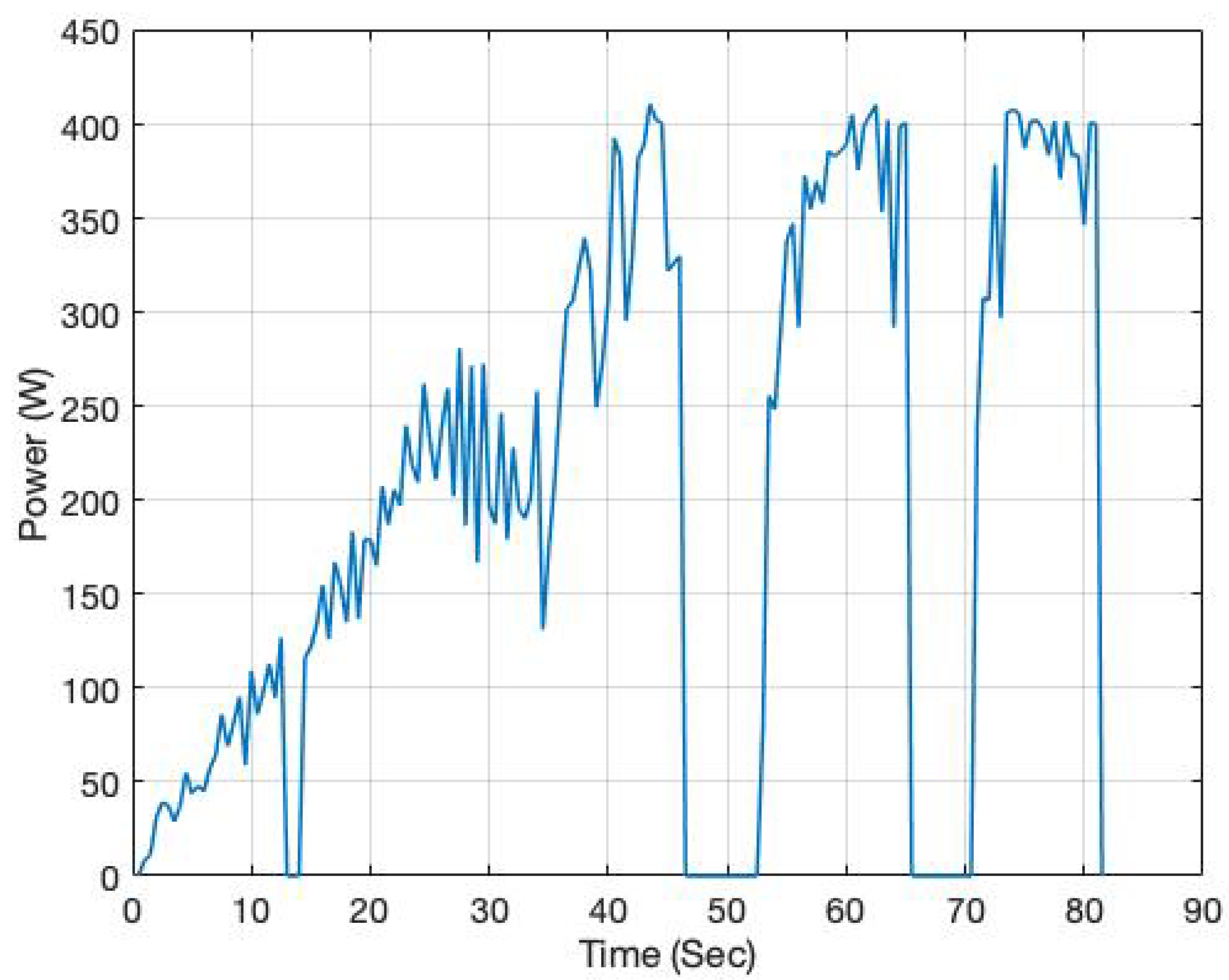
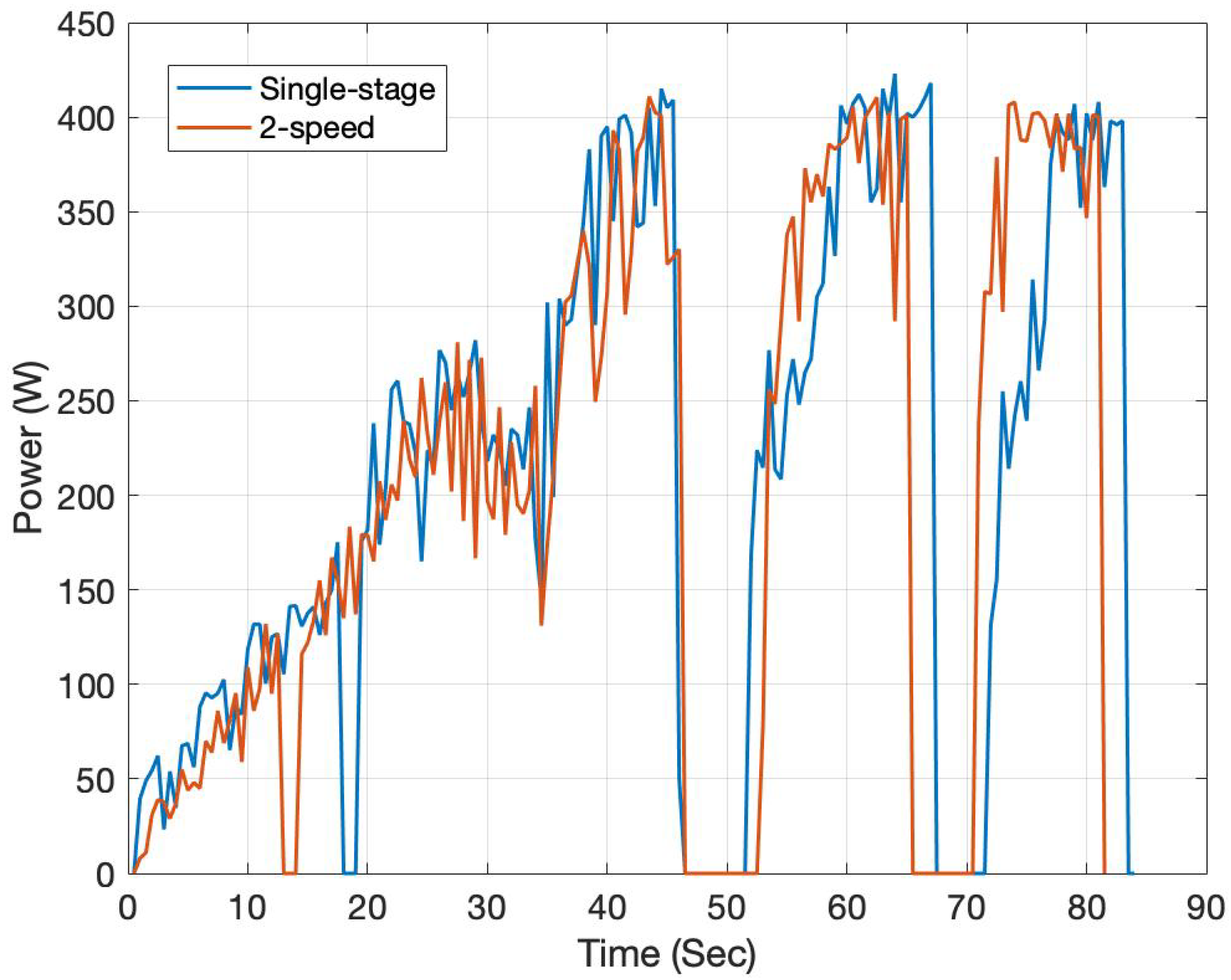
3.1. Tests on Single-Stage Setup
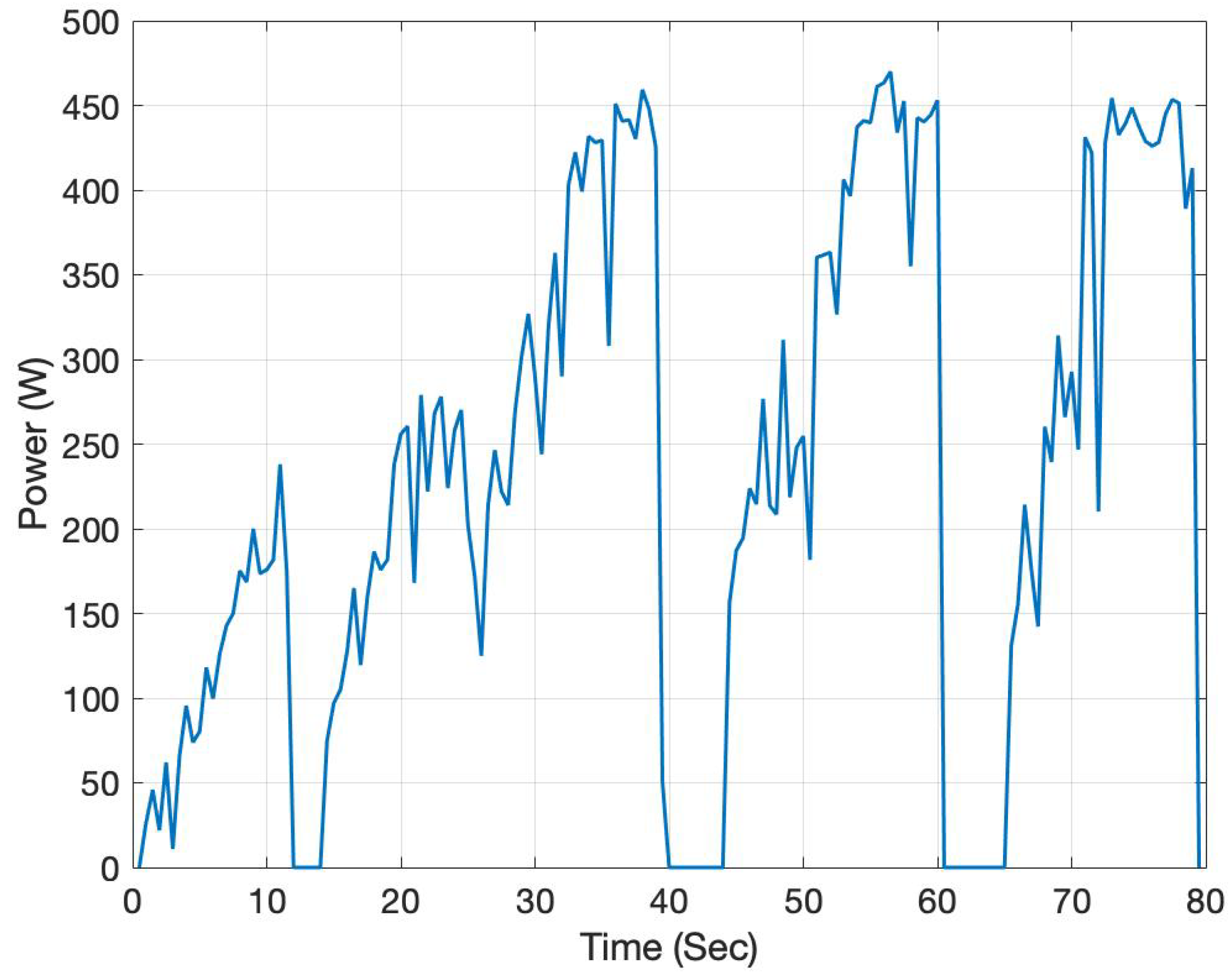
3.2. Tests on Two-Speed Gearbox Setup
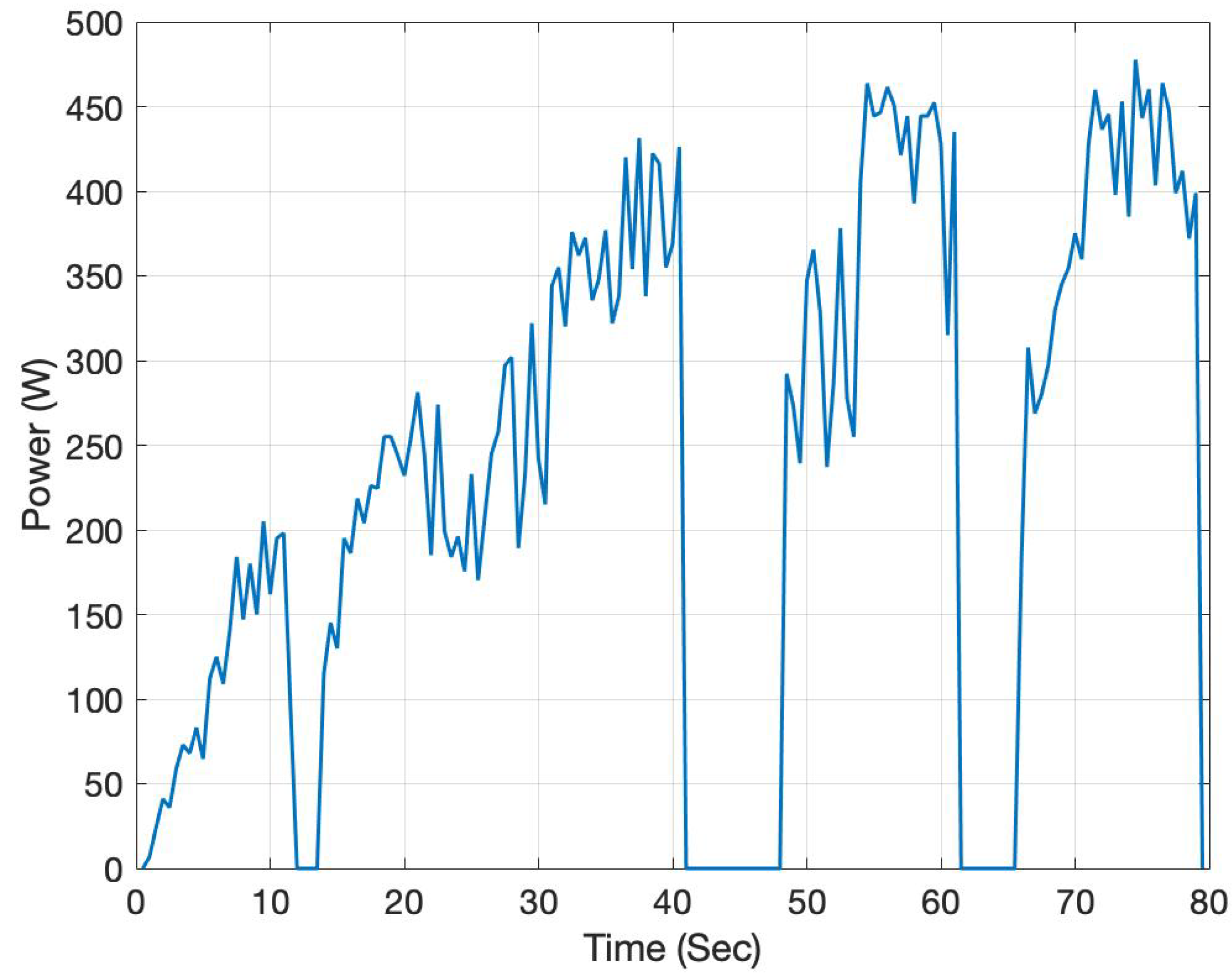
3.3. On Road Testing of a Prototype CVT
3.4. Results Evaluation
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chatelain, A.; Erriquez, M.; Mouliére, P.Y.; Schäfer, P. What a Teardown of the Latest Electric Vehicles Reveals about the Future of Mass-Market EVs; Technical Report; McKinsey: New York, NY, USA, 2018. [Google Scholar]
- Miller, J. Hybrid electric vehicle propulsion system architectures of the e-CVT type. IEEE Trans. Power Electron. 2006, 21, 756–767. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Emadi, A. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles: Fundamentals, Theory, and Design; Power Electronics and Applications; CRC Press: New York, NY, USA, 2009. [Google Scholar]
- Kluger, M.A.; Long, D. An Overview of Current Automatic, Manual and Continuously Variable Transmission Efficiencies and Their Projected Future Improvements; SAE Technical Paper Series; SAE International: Warrendale, PA, USA, 1999; Volume 1259. [Google Scholar]
- Spanoudakis, P. Design and Tuning of Operational Parameters for a Prototype Transmission System. Ph.D. Thesis, Technical University of Crete, Chania, Greece, 2013. [Google Scholar]
- Holdstock, T. Investigation Into Multiple-Speed Transmissions for Electric Vehicles. Ph.D. Thesis, University of Surrey, Guildford, UK, 2014. [Google Scholar]
- Bottiglione, F.; Pinto, S.D.; Mantriota, G.; Sorniotti, A. Energy Consumption of a Battery Electric Vehicle with Infinitely Variable Transmission. Energies 2014, 7, 8317–8337. [Google Scholar] [CrossRef]
- Spanoudakis, P.; Tsourveloudis, N.C. On the efficiency of a prototype Continuous Variable Transmission system. In Proceedings of the 21st Mediterranean Conference on Control and Automation, Chania, Crete, Greece, 25–28 June 2013; pp. 290–295. [Google Scholar] [CrossRef]
- Mantriota, G. Fuel consumption of a vehicle with power split CVT system. Int. J. Veh. Des. 2005, 37, 327–342. [Google Scholar] [CrossRef]
- Zhang, Z.; Zuo, C.; Hao, W.; Zuo, Y.; Zhao, X.L.; Zhang, M. Three-speed transmission system for purely electric vehicles. Int. J. Automot. Technol. 2013, 14, 773–778. [Google Scholar] [CrossRef]
- Qin, D.; Zhou, B.; Hu, M.; Hu, J.; Wang, X. Parameters design of powertrain system of electric vehicle with two-speed gearbox. J. Chongqing Univ. 2011, 34, 1–6. [Google Scholar]
- Spanoudakis, P.; Tsourveloudis, N.C. A prototype variable transmission system for electric vehicles: Energy consumption issues. Int. J. Automot. Technol. 2015, 16, 525–537. [Google Scholar] [CrossRef]
- Bingzhao, G.; Qiong, L.; Lulu, G.; Hong, C. Gear ratio optimization and shift control of 2-speed I-AMT in electric vehicle. J. Mech. Syst. Signal Process. 2015, 50, 615–631. [Google Scholar]
- Sorniotti, A.; Pilone, G.L.; Viotto, F.; Bertolotto, S. A novel seamless 2-speed transmission system for electric vehicles: Principles and simulation results. SAE Int. J. Engines 2011, 4, 2671–2685. [Google Scholar] [CrossRef]
- Spanoudakis, P.; Tsourveloudis, N.C.; Koumartzakis, G.; Krahtoudis, A.; Karpouzis, T.; Tsinaris, I. Evaluation of a 2-speed transmission on electric vehicle’s energy consumption. In Proceedings of the 2014 IEEE International Electric Vehicle Conference (IEVC), Florence, Italy, 17–19 December 2014. [Google Scholar]
- Elmarakbi, A.; Morris, A.; Ren, Q.; Elkady, M. Modelling and Analyzing Electric Vehicles with Geared Transmission Systems: Enhancement of Energy Consumption and Performance. Int. J. Eng. Res. Technol. 2013, 2, 1215–1254. [Google Scholar]
- Sorniotti, A.; Subramanyan, S.; Turner, A.; Cavallino, C.; Viotto, F.; Bertolotto, S. Selection of the Optimal Gearbox Layout for an Electric Vehicle. SAE Int. J. Engines 2011, 4, 1267–1280. [Google Scholar] [CrossRef]
- Rinderknecht, S. Electric power train configurations and their transmission systems. In Proceedings of the International Symposium on Power Electronics Electrical Drives Automation and Motion (SPEEDAM), Pisa, Italy, 14–16 June 2010; pp. 1564–1568. [Google Scholar]
- Knödel, U.; Stube, A.; Blessing, U.C.; Klosterman, S. Design and Implementation of requirement-driven electric drives. ATZ Worldw. 2010, 112, 56–60. [Google Scholar] [CrossRef]
- Ren, Q.; Crolla, D.; Morris, A. Effect of transmission design on Electric Vehicle (EV) performance. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–11 September 2009; pp. 1260–1265. [Google Scholar] [CrossRef]
- Loveday, E. Vocis Says Two-Speed Electric Vehicle Transmission Will Boost Battery Life. Available online: https://www.autoblog.com/2011/08/19/vocis-says-two-speed-electric-vehicle-transmission-will-boost-ba/?guccounter=1 (accessed on 1 December 2018).
- McKeegan, N. Antonov’s 3-Speed Transmission for Electric Vehicles Boosts Efficiency by 15 Percent. Available online: http://www.gizmag.com/antonov-3-speed-transmission-ev/19088/ (accessed on 1 December 2018).
- Kreisel Unveils an Automated 2-Speed Transmission for Electric Cars. Available online: https://electrek.co/2018/09/06/kreisel-automated-2-speed-transmission-electric-cars/ (accessed on 1 December 2018).
- NexaTM Power Module User’s Manual; Ballard Power Systems Inc.: Burnaby, BC, Canada, 2003.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | |
|---|---|
| Chassis | Aluminum alloy |
| Body | Carbon fiber |
| Motor | Brushless electric motor |
| Max Motor Torque | 4 Nm |
| Max Motor rpm | 4000 rpm |
| Power Source | fuel cell, 1.2 KW |
| Dimension | 2.5 × 1.25 × 1 m (L × W × H) |
| Weight | 77 Kg/79 Kg (with gearbox) |
| Max Vehicle Speed | 37 Km/h |
| Gear Change Speed (Km/h) | Mean Power Demand (W) | (lt) |
|---|---|---|
| 8 | 210.12 | 4.37 |
| 11 | 205.38 | 4.28 |
| 14 | 221.32 | 4.49 |
| 17 | 232.09 | 4.58 |
| 20 | 235.82 | 4.62 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Spanoudakis, P.; Tsourveloudis, N.C.; Doitsidis, L.; Karapidakis, E.S. Experimental Research of Transmissions on Electric Vehicles’ Energy Consumption. Energies 2019, 12, 388. https://doi.org/10.3390/en12030388
Spanoudakis P, Tsourveloudis NC, Doitsidis L, Karapidakis ES. Experimental Research of Transmissions on Electric Vehicles’ Energy Consumption. Energies. 2019; 12(3):388. https://doi.org/10.3390/en12030388
Chicago/Turabian StyleSpanoudakis, Polychronis, Nikolaos C. Tsourveloudis, Lefteris Doitsidis, and Emmanuel S. Karapidakis. 2019. "Experimental Research of Transmissions on Electric Vehicles’ Energy Consumption" Energies 12, no. 3: 388. https://doi.org/10.3390/en12030388
APA StyleSpanoudakis, P., Tsourveloudis, N. C., Doitsidis, L., & Karapidakis, E. S. (2019). Experimental Research of Transmissions on Electric Vehicles’ Energy Consumption. Energies, 12(3), 388. https://doi.org/10.3390/en12030388