1. Introduction
At present, global energy crisis and environmental pollution are becoming increasingly serious. As alternatives to traditional energy, renewable energy sources, such as wind power and photovoltaic (PV) generation, have been rapidly developed worldwide. However, the inherent randomness and intermittent nature of renewable energy pose serious challenges to the balance of power systems [
1]. With the increasing attention to power supply security and the further introduction of new energy policies, the access to numerous renewable energy sources has undergone drastic changes in distribution networks.
Distributed generation (DG) has the advantages of diverse energy sources, flexible power generation mode, quick benefit from investment, and environmental friendliness. Thus, DG meets the decentralized power demand and improves the economics of distribution networks. DG is a new type of energy comprehensive utilization method which can potentially be developed and become a priority direction for future energy field and power systems [
2,
3,
4]. However, the massive penetration of distributed energy has changed the structure and trend of distribution networks, thereby increasing the uncertainty of power distribution networks, which may cause large fluctuations in the bus voltage. As an important means of energy saving and emission reduction, electric vehicles (EVs) are characterized by flexible energy supply, low energy consumption, and light pollution and, thus, are receiving increasing attention [
5,
6,
7]. The charging demand of EVs is random in time and space, thus changing the relationship between the supply and demand of the system and affecting the power balance of the distribution network. With the large-scale promotion of electric vehicles, the voltage safety of power systems faces even more severe challenges [
8,
9,
10,
11]. A Spanish distribution network with 100 buses was tested in Reference [
8]; the test results show that the access of electric vehicles will lead to the decrease of bus voltage in the distribution network. Reference [
9] evaluates the cumulative distribution function of bus voltage after the access of electric vehicles; it shows the electric vehicles will greatly increase the probability that the voltage of the bus drops under the lower limit. Renewable energy power fluctuations and massive access to EVs have made distribution grid voltage problems even more critical.
Active distribution networks (ADNs) are an effective solution to achieve grid analysis and operation, such as the grid-connected operation of renewable energy, interaction between grid and facilities, and intelligent power distribution [
12,
13,
14]. In recent years, the economic operation of ADNs has received substantial attention [
15,
16,
17,
18]; by contrast, voltage issues have been paid minimal attention. Currently, there are four main methods to solve the voltage problem of distribution network. The first is to build more renewable energy generations, and the voltage support relies on the active power output of renewable energy generations [
9,
19]. However, there will be a large amount of investment to the construction of renewable energy generations; moreover, due to the intermittence and randomness of renewable energy, when it cannot provide enough active power, the voltage issue will still occur.
The second method is to use reactive power reserve for voltage control, which is the most widely used method of power grid voltage control [
20,
21]. Aiming at the problem of voltage fluctuation caused by photovoltaic fluctuation, in Reference [
20], the rapid reactive power regulation ability of photovoltaic itself is used to adjust the voltage fluctuation. Reference [
21] adopts a centralized reactive power compensation device to stabilize the voltage and restores the exceeding limit bus to the normal range. However, when photovoltaic reactive power is used for voltage control and the photovoltaic output active power is large, it cannot provide enough reactive power to control the voltage due to the capacity limitation. If the centralized reactive power compensation equipment is used, since the voltage difference of each bus in the distribution network cannot be changed, the voltage of all buses cannot be restored to the normal range when the difference of the bus voltages is large.
The third method is to control the voltage by controlling the load power [
10,
22]. Reference [
10] solves the voltage problem during the peak load period by reducing the charging speed of electric vehicles. However, the load regulation will affect the electricity consumption and daily work and life of users. The fourth is to use transformers. Reference [
23] adopts a transformer to increase the voltage margin, but differences still exist between bus voltages in this method. To solve this problem, the use of transformers should be increased; however, the cost of on-load transformers is relatively high, which leads to a sharp rise in the cost of distribution network construction.
With the development of ADN, DG and EV switch frequently and wind power and PV change drastically, thereby increasing the degree of voltage fluctuation of ADN. If the voltage is adjusted with reactive power throughout the ADN range, responding to voltage fluctuations quickly will be difficult and will generate large losses. On the basis of the observability and controllability of ADN, the ADN can be divided into multiple regions. The achievement of an autonomous region (AR) through power coordination and power variation compensation to a great extent is an effective method to solve the problems mentioned above. In Reference [
15], through the division of AR, the rapid response of active fluctuations is achieved and the loss is effectively reduced; however, the balance of reactive power and voltage fluctuation of the distribution network are not considered.
This study presents an ADN voltage control method based on AR. Dividing ADN and the coordinating power of the controllable sources and loads (CSAL) results in rapid adjustment when voltage fluctuates. First, the influencing factors of ADN power variation are analyzed and the relationship between bus voltage and power is derived. Second, the ADN voltage control method based on active and reactive power coordination in AR is proposed. Then, the voltage optimization control model based on active and reactive power balance and on active and reactive power coordination is established. Finally, the effectiveness of the proposed method is verified through case studies.
3. Voltage Control Method Based on Regional Power Coordination
Renewable energy output and EV charging and discharging are random. This characteristic causes large fluctuations on the voltage of ADN, which in turn exceeds the limit of the bus voltage. When the number of sources and loads increase and are adjusted, problems such as real-time response difficulty, large active power loss, and complicated communication system occur. Therefore, dividing the ADN into several ARs containing CSAL is an effective solution. The power is independently balanced in each AR to achieve rapid adjustment under power variation [
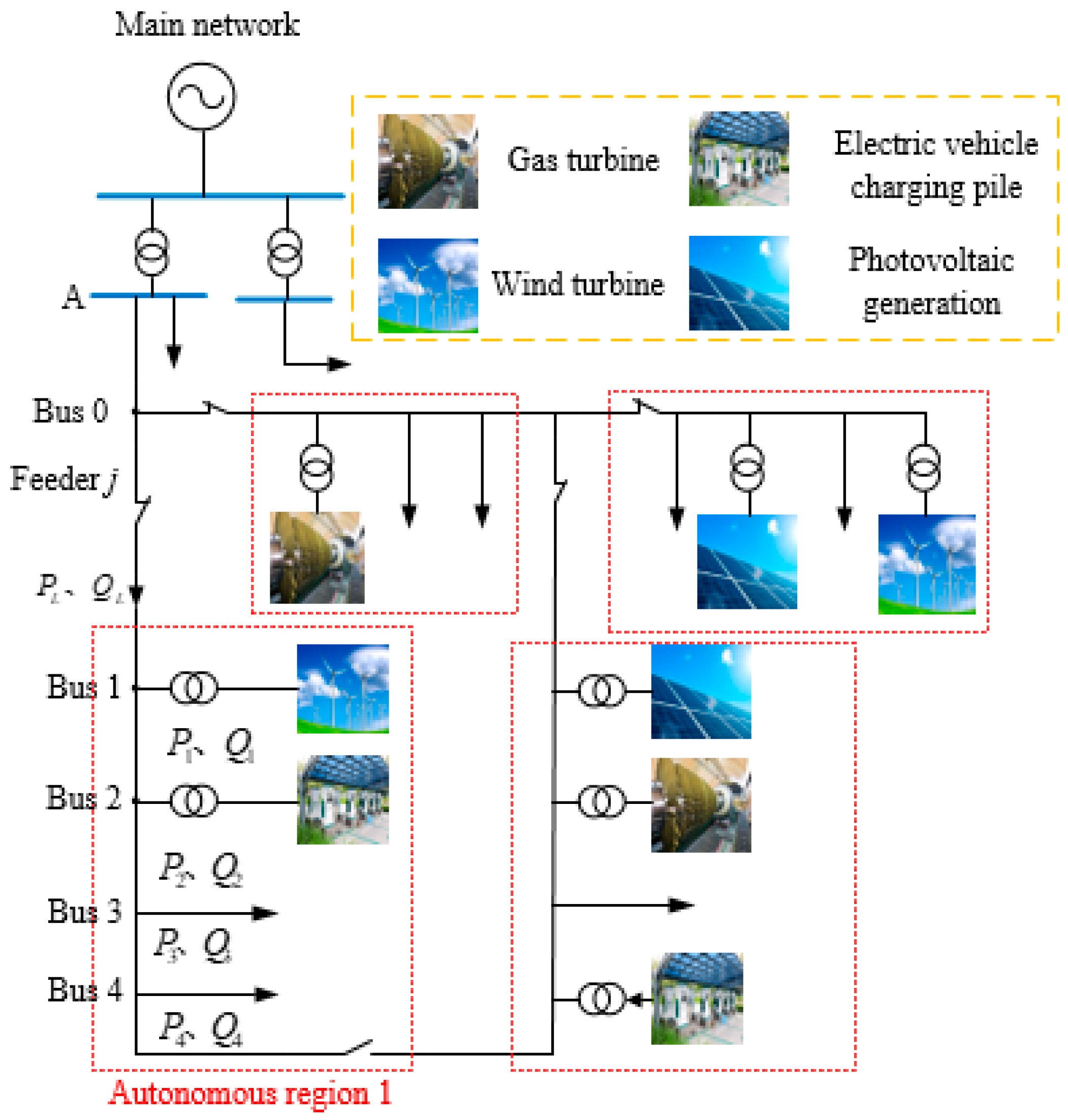
15]. In consideration of the characteristics of ADN, the AR can be divided in accordance with the following principles (
Figure 3):
Principle 1: If a controllable source exists between the two circuit breakers on the feeder, this part of ADN can be divided into one AR.
Principle 2: If a controllable source exists between the circuit breakers and the end of the line, this part of ADN can be divided into one AR.
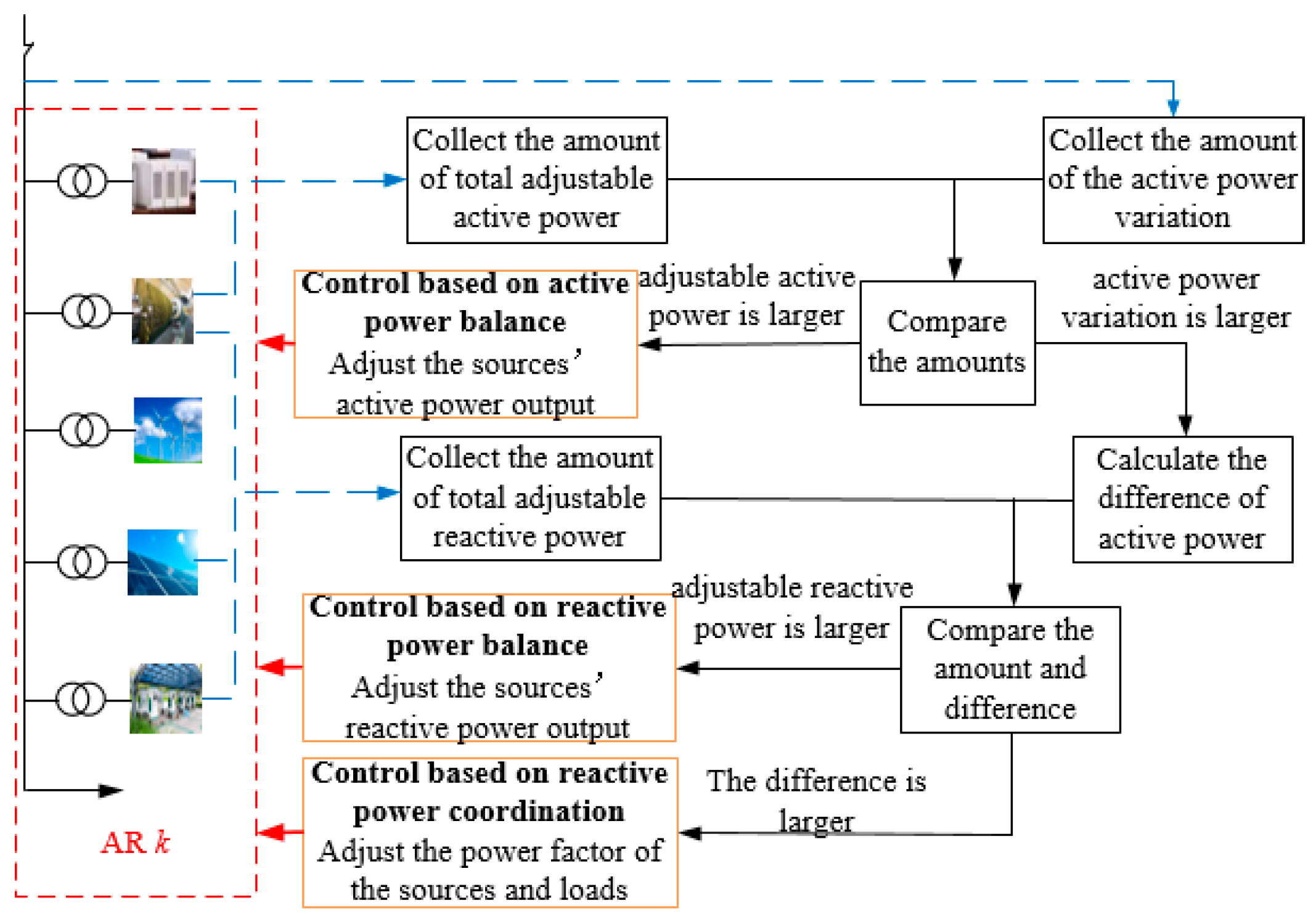
The idea of voltage control through AR is shown in
Figure 3. The controllable sources in the AR include active- and reactive-power-adjustable DGs, such as gas and wind turbines, PVs, and energy storages. The controllable loads are mainly EVs. Gas turbines usually do not run as a reactive source; hence, their reactive power output is generally not adjustable. The wind turbines and PVs adopt maximum power tracking control. When the wind speed or sunshine is constant, the output power cannot be increased. However, the active power output can be reduced by abandoning wind or light. When the active output of the wind turbines or PVs is less than their own capacity, the reactive power output can be adjusted and the adjustable reactive capacity is determined by their capacity and active power output. The energy storage output can be adjusted within its limits. The power of the EV is dependent on the capacity of the charging station, and if necessary, the EV can provide feedback to the grid. Therefore, the adjustable active power in any AR
at time
is the sum of the adjustable active power of the gas turbines and energy storages.
where
,
, and
are respectively the total adjustable active power, total adjustable active power of gas turbines, and total adjustable active power of energy storages in AR
at time
;
and
are respectively the capacity and active power output of the
gas turbine in AR
at time
; and
and
are respectively the amount of gas turbines and energy storages in AR
.
If active power variation occurs in AR
at time
and the active power fluctuation
is smaller than the adjustable active power in the AR (i.e.,
), then the active power in the AR can be adjusted to compensate for the active power variation and the voltage can be controlled. Compared with reactive power adjustment, this method can maximize the economic advantages of distributed generation. At this point, a voltage control method based on active power balance (AP-VC) is adopted to compensate for the active variation in the region by adjusting the active power output of the gas turbines and energy storages. Therefore, the total amount of active and reactive power to be adjusted in region
at time
is
where
and
are respectively the total active power and reactive power adjustment amount in AR
at time
.
If the active power variation amount
is larger than the adjustable active power in the AR, even if the active power output of the gas turbines and energy storages in the AR are adjusted to their limit, the active power variation cannot be fully compensated. At this point, a difference
between the active power variation and the adjustable amount remains. The total adjustable reactive power in AR
and its VEAP is
where
and
are respectively the total amount of adjustable reactive power and VEAP of AR
at time
;
and
are respectively the resistance and reactance of the line connecting the AR
to the former net;
,
,
and
are respectively the total adjustable amount of reactive power through the wind turbines, PVs, energy storages, and EVs in AR
at time
;
,
, and
are the capacity of the
wind turbines,
PVs, and
EVs, respectively, in AR
;
,
, and
are the active power output of the
wind turbines,
PVs, and
EVs, respectively in AR
at time
; and
,
, and
are respectively the amount of wind turbines, PVs, and EVs in AR
.
If
is less than the VEAP of AR
at this point, a voltage control method based on reactive power balance (RP-VC) is adopted. After the gas turbines and energy storages in the AR have been adjusted to the limit, the reactive output of the wind turbines, PVs, energy storages, and EVs is adjusted to compensate for the active power variation in the AR to stabilize the voltage. Therefore, the total amount of active and reactive power to be adjusted in AR
at time
is
If the active power variation is larger than the sum of the VEAP and adjustable active power of AR
, then
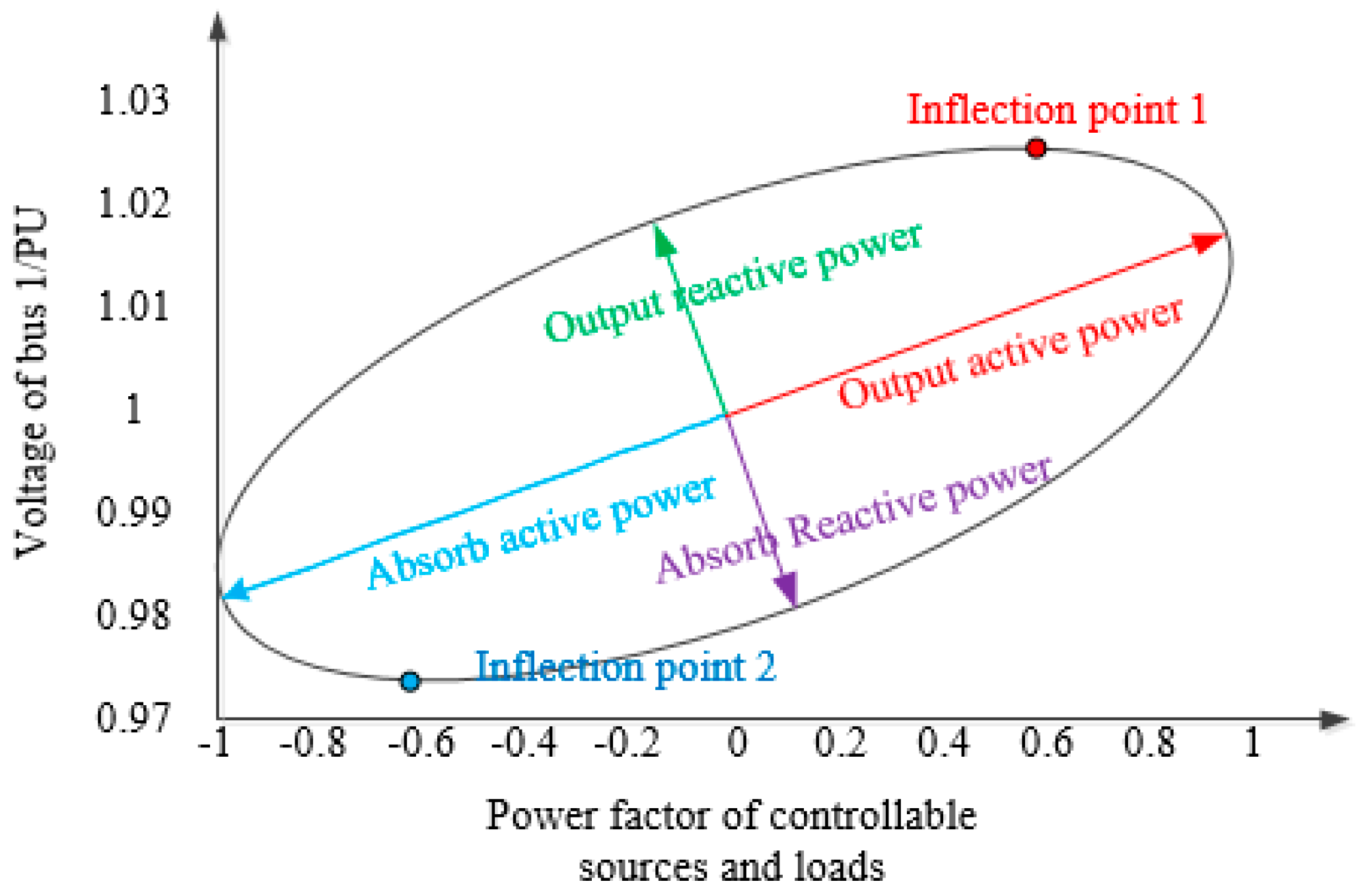
. Although the active and reactive power outputs of all controllable sources and loads in the AR have been adjusted to their limit values, the active power variation of the AR cannot be fully compensated. At this point, all controllable sources and loads in the area operates at a rated capacity and the power factor of wind turbines, PVs, energy storages, and EVs must be adjusted to compensate for active power variation. When all the sources and loads in AR
run at the inflection point, the sum of the total active power and EVAP reaches its limit
.
where
is the sum of
,
,
, and
;
and
are respectively the adjustable active and reactive power amounts of the controllable source or load connected to bus
in AR
at time
;
is the power factor of the inflection point of AR
; and
and
are respectively the active and reactive power outputs of the controllable source or load connected to bus
in AR
at time
.
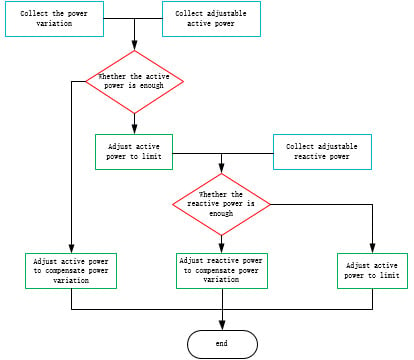
If
is less than the limit, that is,
, the voltage control method based on active and reactive power coordination (ARP-VC) is adopted. First, the gas turbines and energy storages in the AR are adjusted to the limit. Second, the power factor of the wind turbines, PVs, energy storages, and EVs is adjusted in accordance with the active power deficiency to compensate for the active power variation in the AR and to stabilize the voltage. Finally, the total amount of active and reactive power to be adjusted in region
at time
is
If , then the active power fluctuation cannot be completely compensated by adjusting the power in the AR. In this case, the voltage should be regulated using a transformer or something similar.
To realize the voltage control method, the information of power change and adjustable active and reactive power in the AR is necessary. Therefore, the power metering infrastructure should be installed on the line between the first bus of each AR and its former bus to get the power change and on the DGs to get the adjustable active and reactive power. The information needs to be transmitted to a central processing unit by the information and communication technology (ICT) to calculate the amount of adjustment of the DG power and then to transmit it back to the DGs to complete the voltage control.
5. Case Study
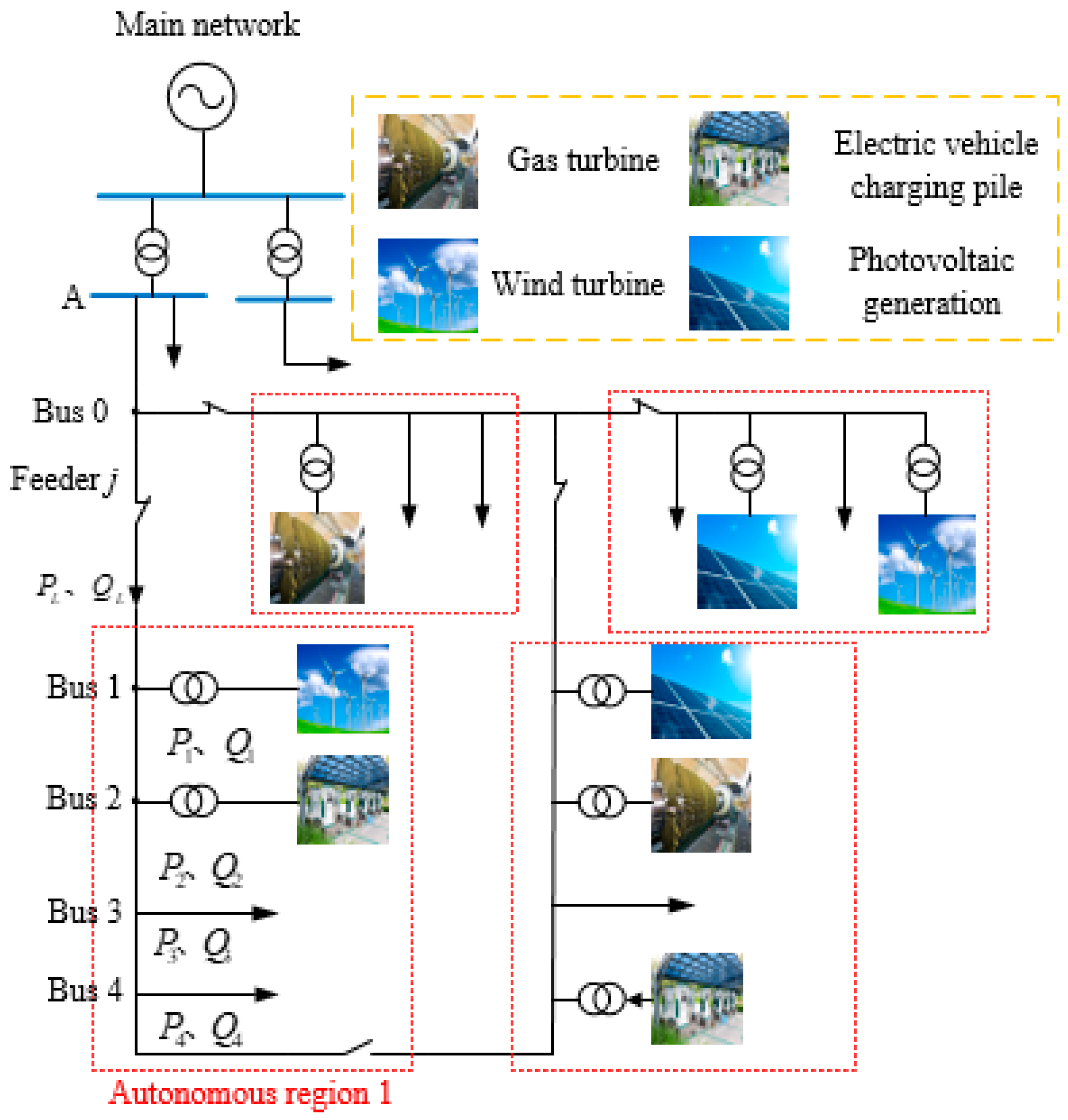
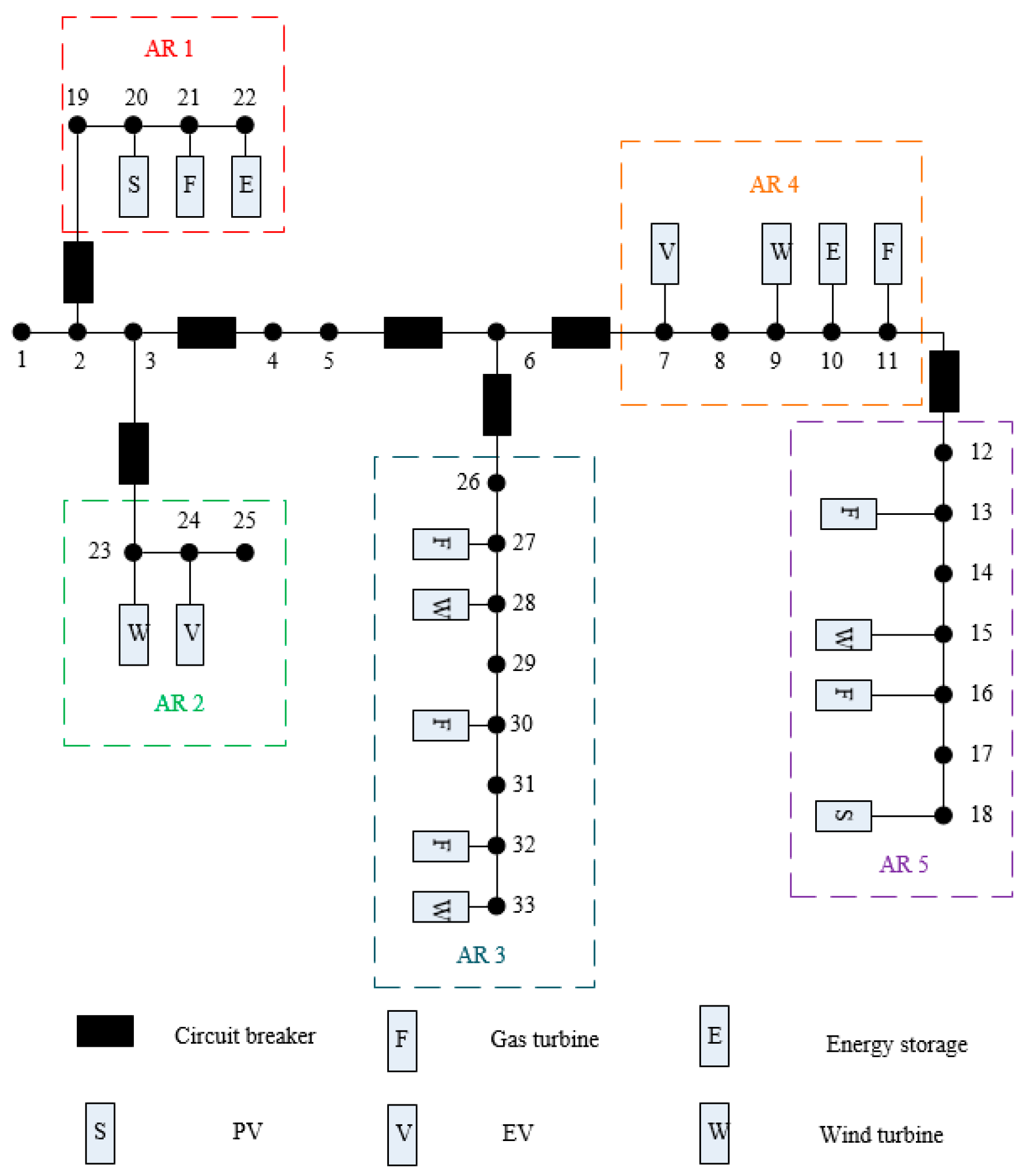
IEEE (Institute of Electrical and Electronics Engineers)-33 study system is a standard distribution network system and its line impedance parameters, load power, and structure are equivalent to the actual distribution network. The IEEE-33 study system has been widely used in the research study of distribution network. Therefore, the system is used to verify the control method proposed in this paper. In this study, DG and EVs are added to the IEEE-33 system to verify the effectiveness of the above methods, as shown in
Figure 5. A balanced bus 1 is connected to the main grid. The allowable operating range of the bus voltage is 0.95–1.05 PU. The initial power of system load, voltage of swing bus, etc. are the original values of the system. In the case of increasing power consumption, light intensity and wind speed from 7:00 a.m. to 10:00 a.m. are simulated. In the control of the voltage in the distribution network, the time interval is usually several minutes [
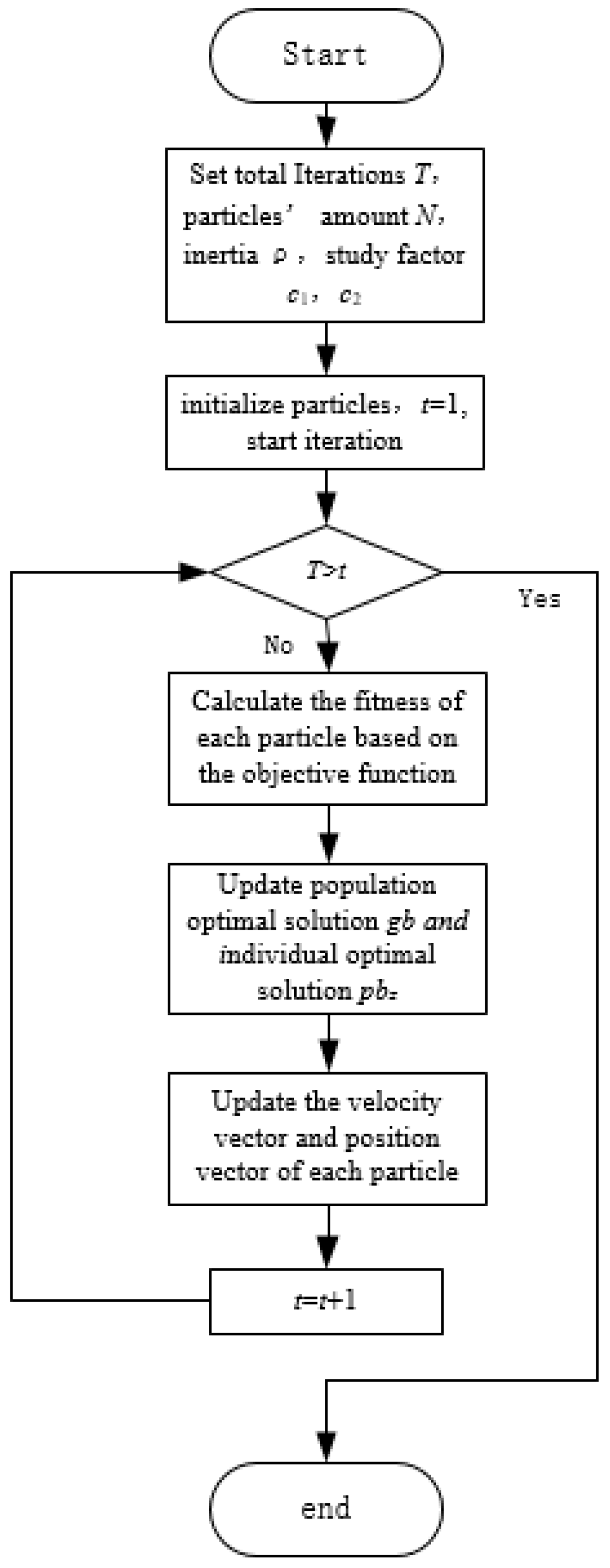
11], so this paper chooses to control the power output of the sources every 20 min. The environment to perform the optimization is specifically as follow: The computer processor is Intel core i5, RAM is 8 GB, and MATLAB/MATPOWER perform the optimization used. The time of each optimization is about 2 s.
Table 1 is the parameters of the gas turbines. When the gas turbines are put into voltage control, their active power must between the upper limit and the lower limit. The parameters a, b, and c are the generation costs when they generate. The values of a, b, and c are from the cost optimization parameters in MATPOWER.
In accordance with the division principle of the AR, the sample system can be divided into five ARs. The first bus of AR 3 is bus 26, and the first bus of the AR 5 is bus 12. Buses 15, 28, and 33 are connected to wind turbines with capacities of 340, 330, and 340 KVA, respectively. Bus 18 is connected to the PV with a capacity of 320 KVA, and buses 13, 16, 27, 30, and 32 are connected with gas turbines. The gas turbines’ active power output limits and cost factor are shown in
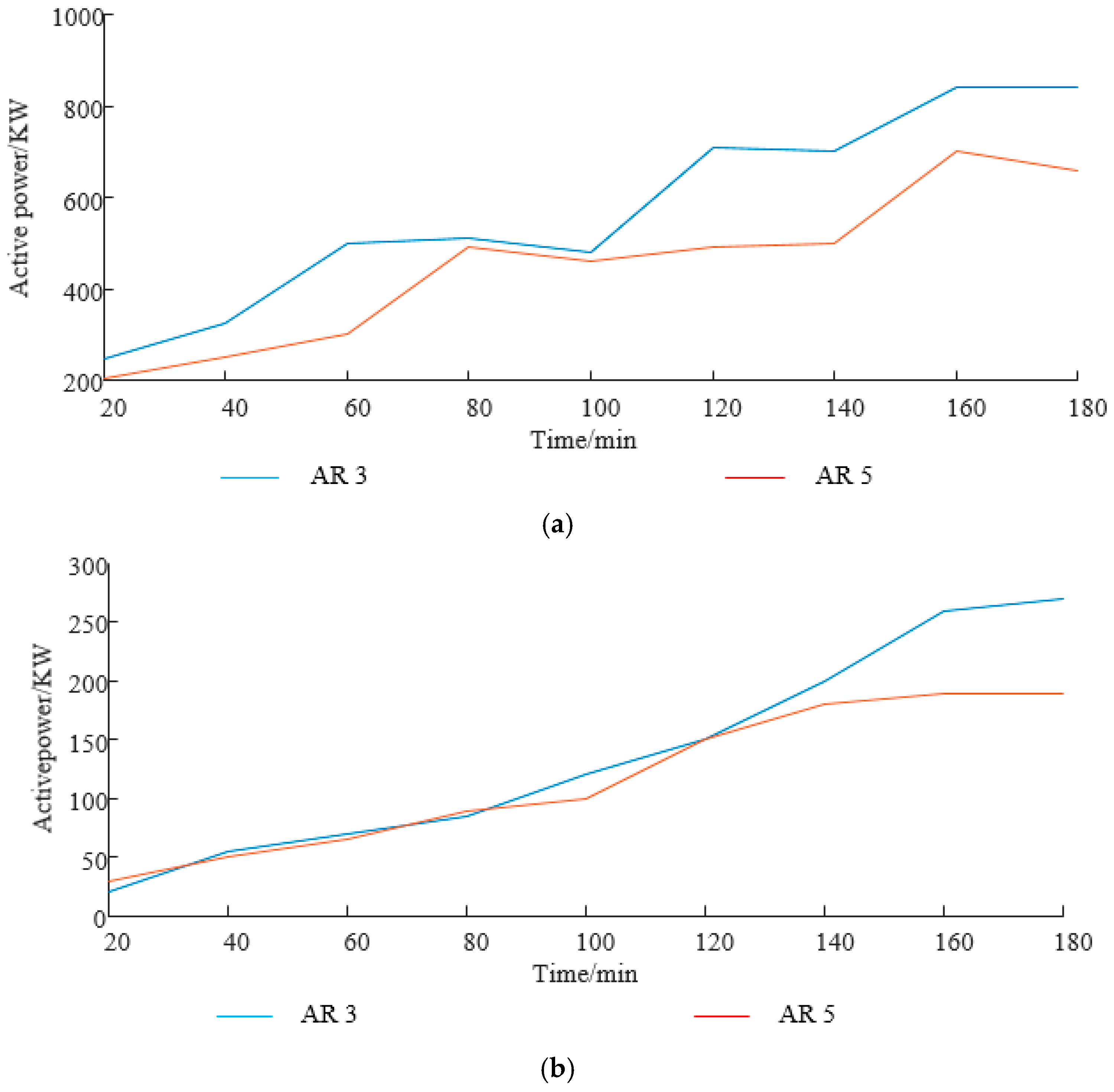
Table 1. All the initial active power outputs of gas turbines are 100 KW, and the reactive power outputs is 0 KVar. The initial active power output of wind turbines and PVs is 200 KW, and the reactive power output is 0 KVar. Assuming that the active power of the loads is connected to buses 12, 14, 17, 26, 29, and 31 in ARs 3 and 5, the wind turbines and PVs connected to buses 15, 18, 28, and 33 change. Among them, the wind turbines of buses 28 and 33 reach the upper limits of 160 and 180 min, respectively.
Figure 6 is the total fluctuation amounts of the loads, wind turbines, and PV in ARs 3 and 5 at 20–180 min. The voltage fluctuations of the buses are shown in
Table 2. Without control, the voltage drops rapidly and falls outside the safe operating voltage range.
According to the control method proposed in this study, the total active power variation is smaller than the adjustable active power capacity in AR 3 at 0–40 min. Therefore, the voltage control method based on active balance is adopted to control the active power output of the gas turbines and thus to suppress the fluctuation of the voltage. The optimization variables are the active power output of gas turbines 27, 30, and 32 during this period. Thereafter, the loads and the output of wind turbines and PVs continue to change; thus, the active power variation is greater than the adjustable active power. After 40 min, avoiding voltage overshoot becomes impossible by only adjusting active power. At 40–160 min, the adjustable reactive power in the ARs is greater than the difference and the voltage fluctuation can be suppressed by reactive power adjustment. At this point, the voltage control method based on reactive power balance is used to control the reactive power output of wind turbines and PVs to compensate for active power variation. The optimization variables are the reactive power output of wind turbines 28 and 33 during this period. At 160–180 min, the active power variation is too large even if the reactive power output of all the wind turbines and PVs are adjusted to their limits; thus, the effect of active power change cannot be fully compensated. At this point, a voltage control method based on active and reactive power coordination is needed. The power factor of the controllable sources in AR 3 is adjusted, and the total active and reactive power output in the AR are coordinated to compensate for the active power variation and to reduce the voltage fluctuation. The optimization variables are the active power and reactive power outputs of wind turbines 28 and 33 during this period. Similarly, for AR 5, the AP-VC and RP-VC methods are adopted at 0–60 and 60–180 min, and the optimization variables are the active power output of gas turbines 13 and 16 and reactive power output of wind turbines 15 and PV 33, respectively.
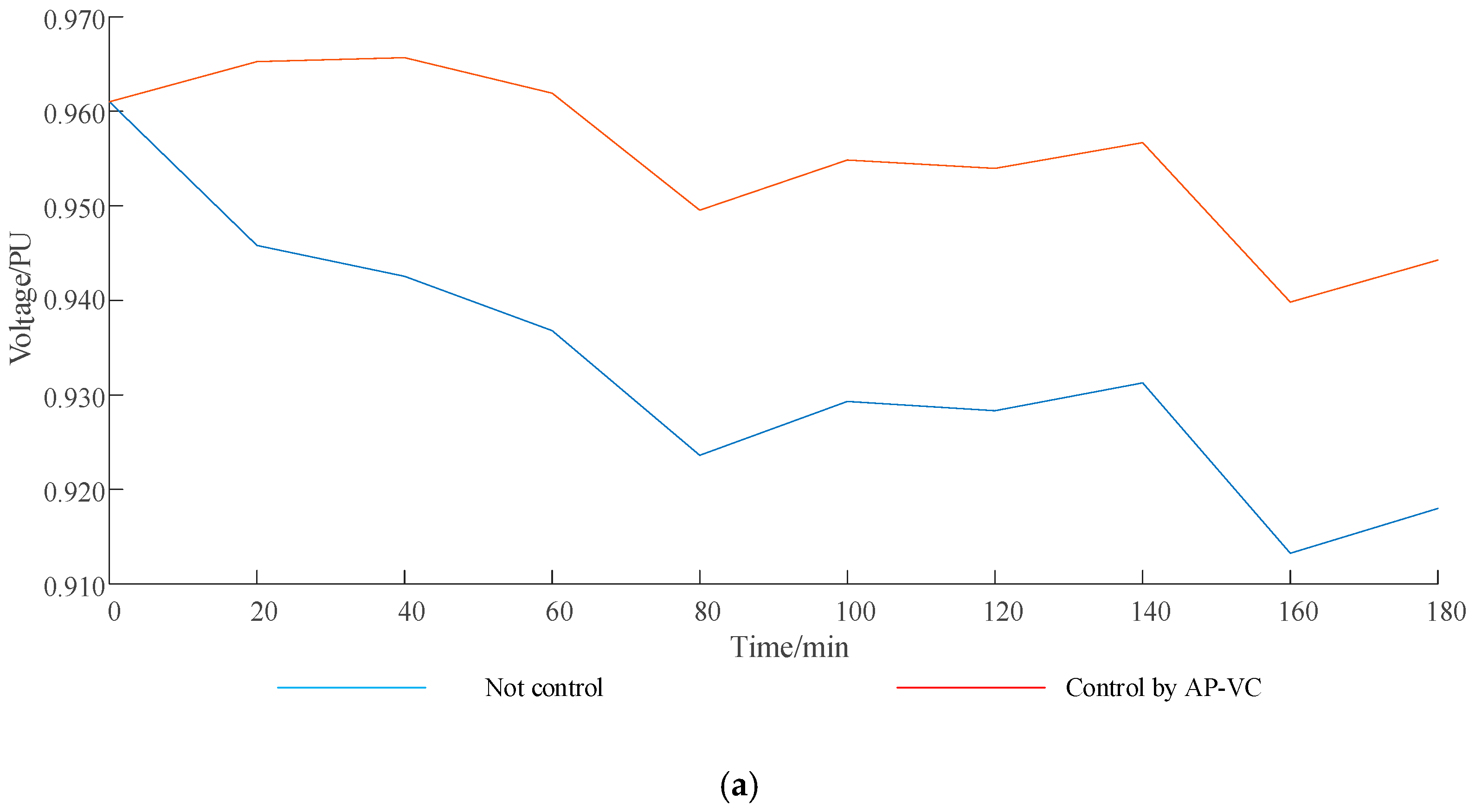
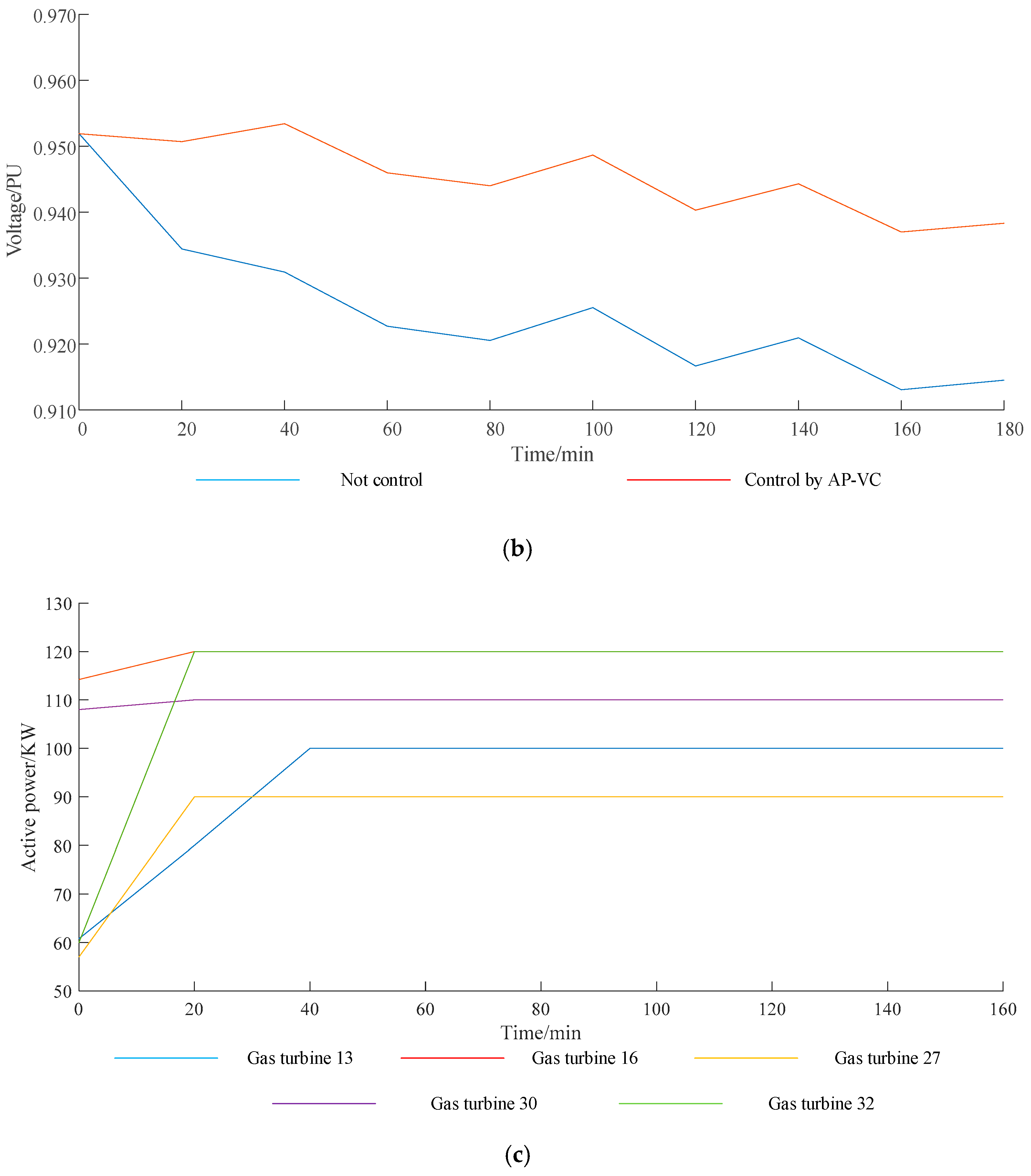
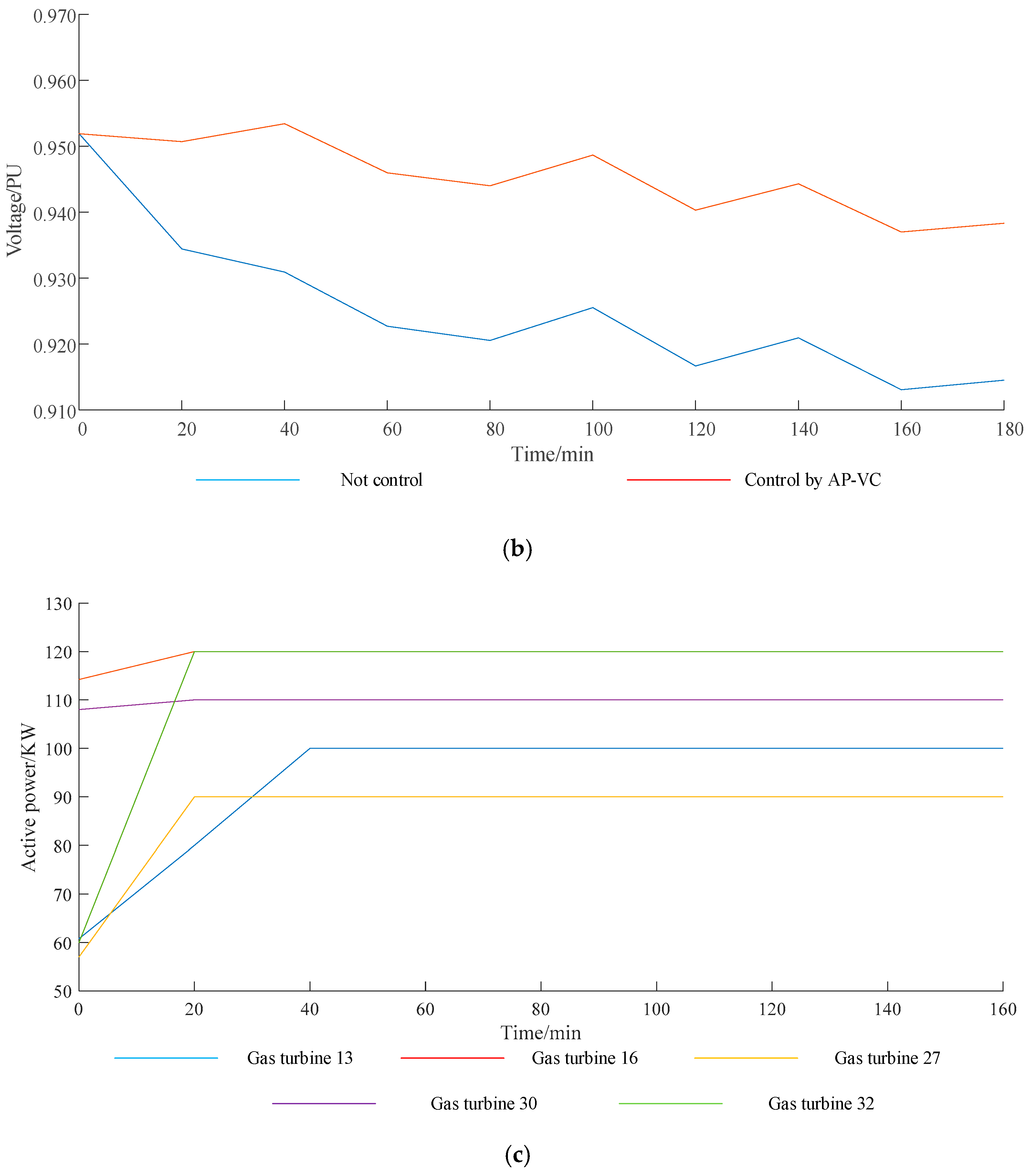
Figure 7a,b show the voltages of buses 17 and 31 when not controlled or under AP-VC control. The two buses are not connected to DG directly and are near the end of the line; hence, active power variation considerably affects the two buses. Under the variation of active power, the blue line is the fluctuation of the bus voltage when not controlled and the red line is the fluctuation of the bus voltage when the active power output is controlled by the AP-VC.
Figure 7c shows the corresponding amount of adjustment in the active power output of the gas turbines. The gas turbines of ARs 3 and 5 have active power outputs reaching upper limits of 40 and 60 min, respectively. Compared with an uncontrolled scenario, adjusting the active power output of the gas turbines can remarkably reduce the drop in voltage amplitude. After the active power output of the gas turbines reaches the maximum, the drop in voltage amplitude in bus 17 is reduced by 0.0285 PU and that in bus 31 is reduced by 0.0274 PU. At 0–40 min, the active power margin is enough to compensate for the active power variation and the voltage fluctuation of bus 17 is small. Given that the gas turbines’ active power output reaches the upper limit after 60 min, the bus voltage begins to drop with the active power variation. With a 140 KW load connected to bus 12 at 80 min, the voltage of bus 17 drops sharply and exceeds the limit, falling to 0.9487 PU. Similarly, after 40 min, the voltage of bus 31 begins to drop due to lack of active power support; thus, its voltage drops to 0.9460 PU at 60 min. The minimum voltages for the two buses are 0.9426 and 0.9390 PU. At 40 min, the output of gas turbine 13 in AR 5 is 220 KW and the output of gas turbine 16 is 180 KW; hence, the power generation unit cost is 14.59. If the active output is equally distributed to two gas turbines, then each output is 200 KW and the unit cost of power generation is 16.06; thus, the voltage of bus 17 is 0.0006 lower than AP-VC. When the active fluctuation is not large, the active power distribution affects the bus voltage slightly but considerably influences the cost. After the active cost has been optimized, the power generation cost is reduced by 9.15%.
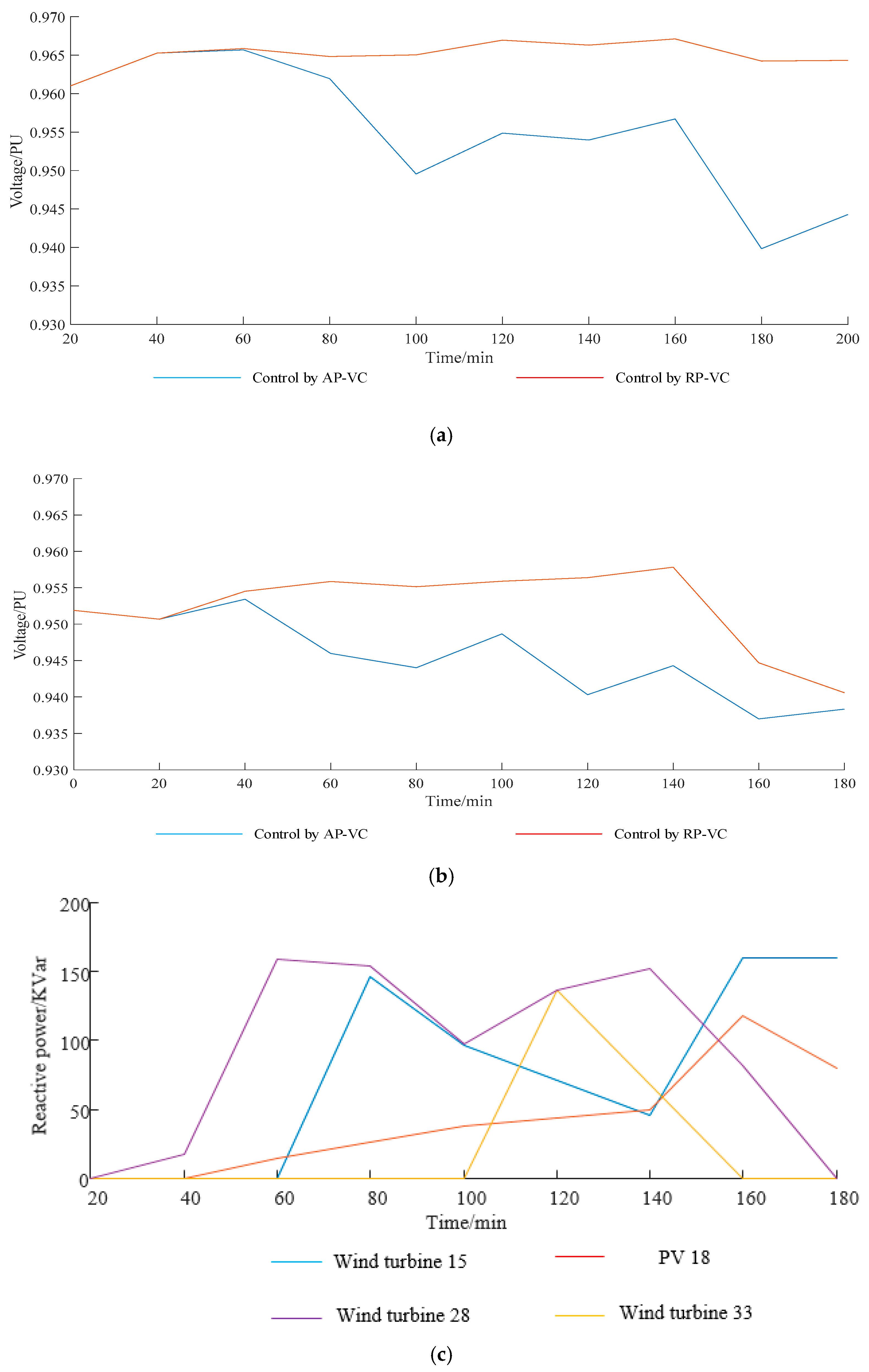
The bus voltages controlled by RP-VC and AP-VC or only by AP-VC are shown in
Figure 8a,b. RP-VC is used to control the reactive power of the wind turbines and PVs in ARs 5 and 3 after 60 and 40 min, respectively.
Figure 8c shows the reactive power output of the wind turbines and PVs at various times. Given the insufficient reactive power of AR 5, the voltage of bus 17 remains above 0.96 PU after 60 min and the voltage fluctuation is small. Similarly, before 140 min, the voltage of bus 31 is stable above 0.95 PU; however, after 160 min, the reactive margin is greatly reduced because the active power output of the wind turbines of AR 3 is close to the rated value and generating sufficient reactive power to support voltage is impossible; thus, the voltage of bus 31 significantly drops from 0.9553 PU to 0.9404 PU.
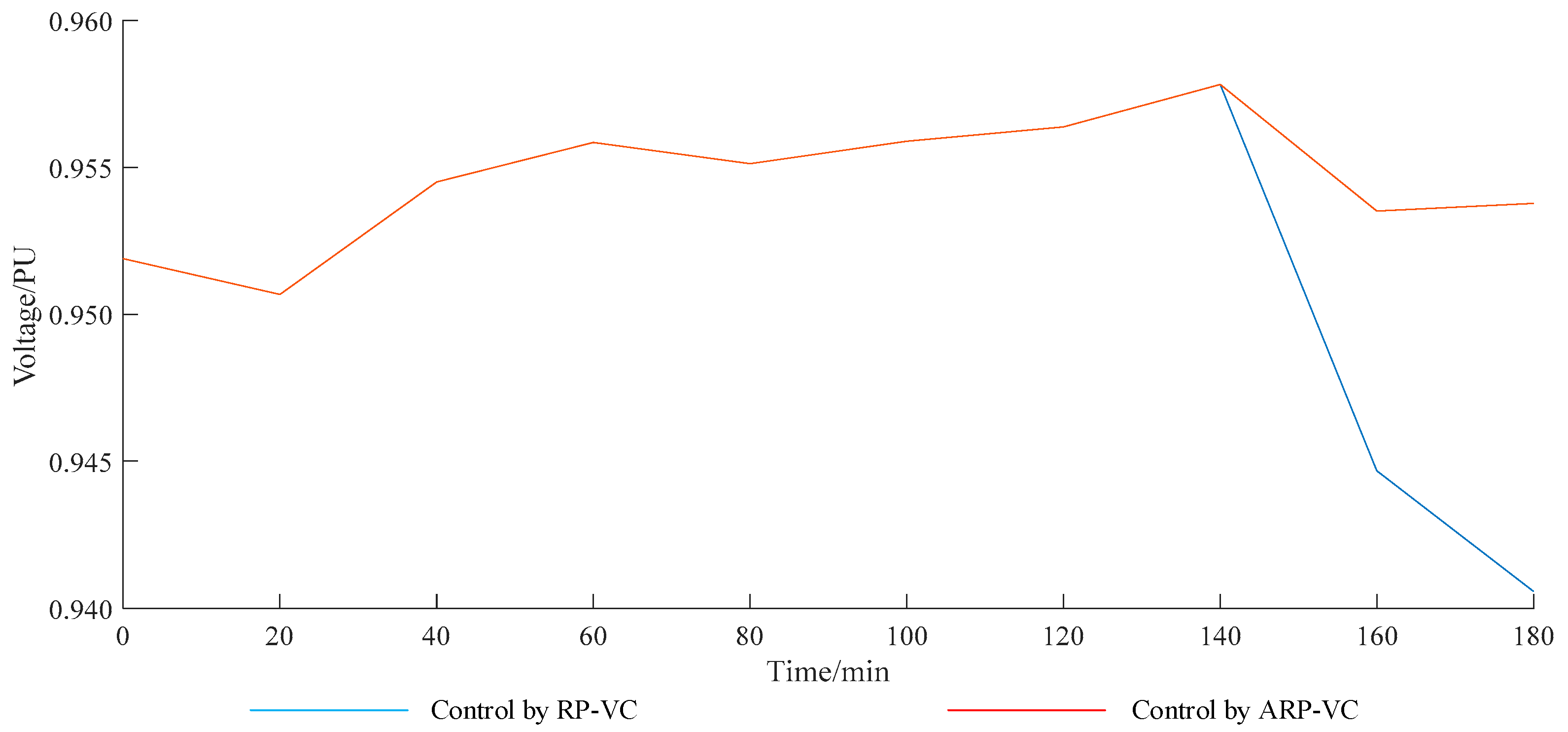
After 160 min, the voltage of bus 31 controlled by ARP-VC is shown in
Figure 9. Controlled by the ARP-VC method, the wind turbines discard a small amount of wind energy, thereby obtaining a large amount of reactive power to compensate for active power change. Compared with the control method that does not adopt the ARP-VC, the voltage of bus 31 does not drop sharply at 160–180 min and is stable above 0.95PU when adopt it. The cost of abandoning wind and light in this study is based on the parameters in Reference [
24], which are all converted to 0.267 (KW·20 min). The total amount of abandoned wind in AR 5 is optimized to 86 and 101 kW at 160 and 180 min, respectively. The costs of abandoned wind in the next 20 min are 22.962 and 26.967, respectively. At 160 min, the sum of the voltage deviations of all buses in AR 3 is 56.647, whereas that of all the buses in AR 3 is 54.263 at 180 min.
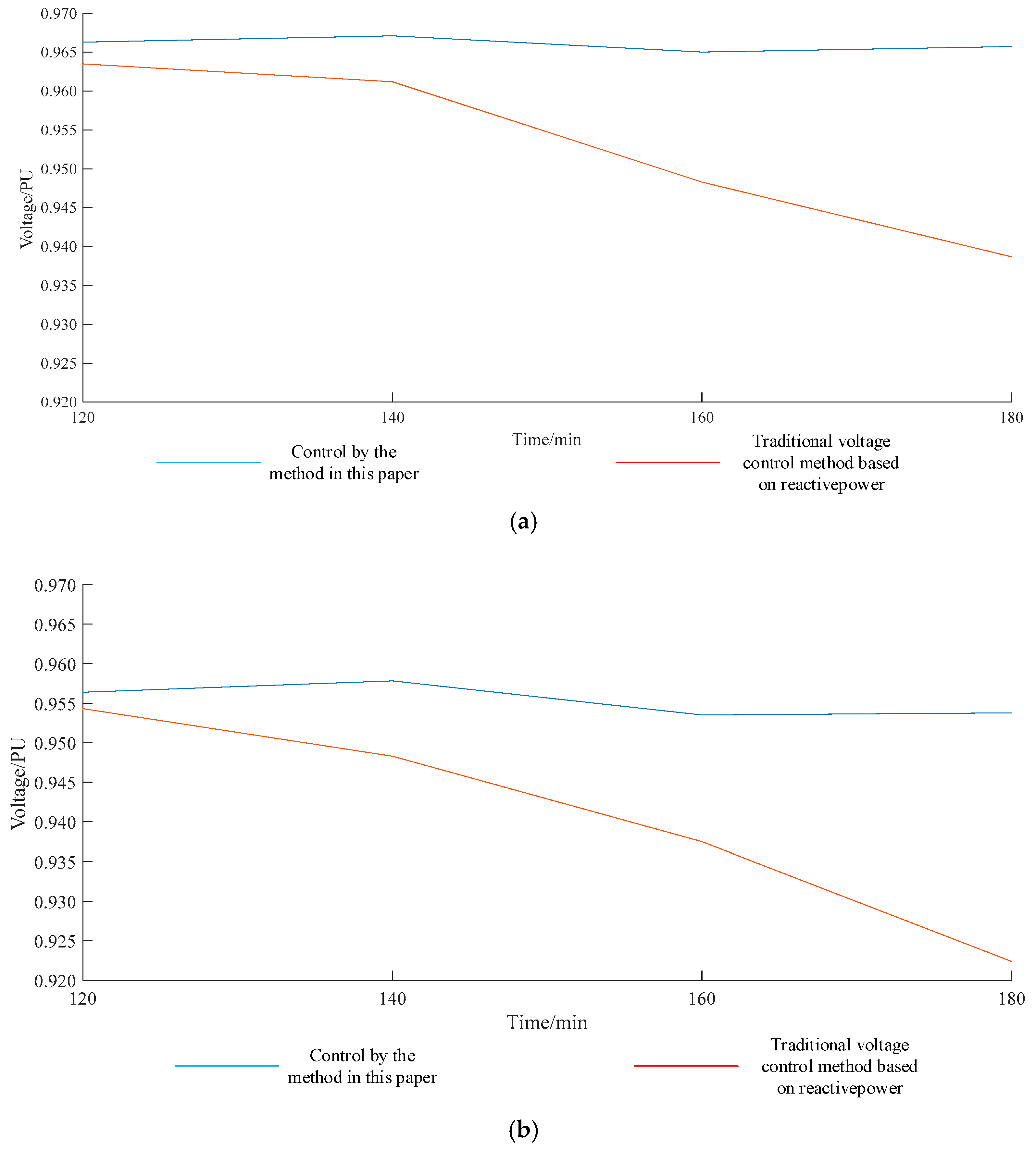
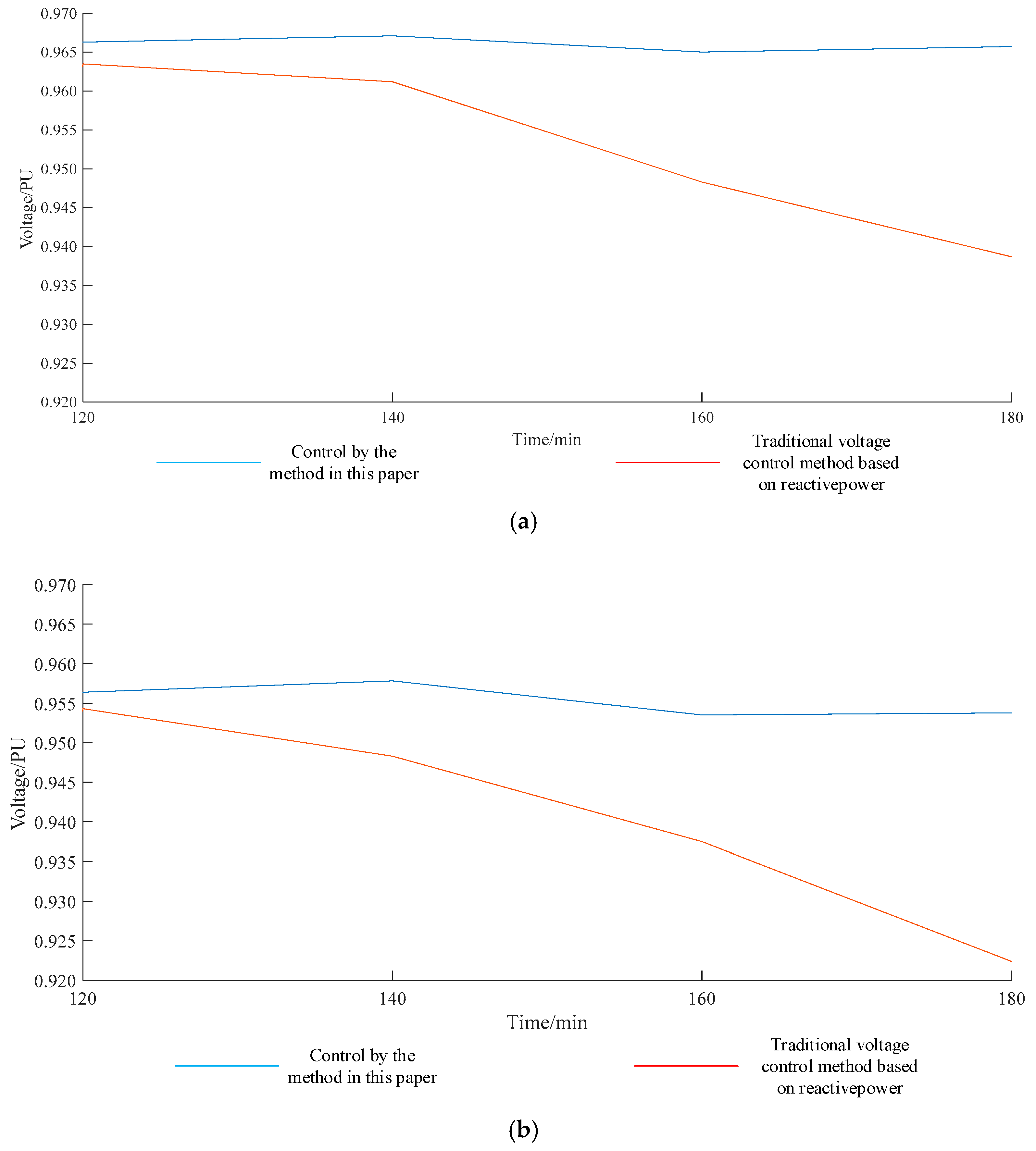
When only the traditional reactive power control method is used to control the voltage, only the reactive power output of wind turbines and PVs can be used because ARs 3 and 5 do not have an independent reactive power compensation device. In AR 3 at 120 min, the active power demand increases by 560 kW whereas the VEAP of the wind turbines and PVs can only reach 431 KW. In AR 5 at 160 min, the active demand increases by 510 KW whereas the VEAP can only reach 307 KW. Moreover, the growth rate of the loads’ active power demand is greater than the output of the wind turbines and PVs; the increase in their active power output remarkably decreases their reactive power margin. Therefore, after 120 min, the reactive power cannot compensate for the active power variation, causing the bus voltage to drop rapidly, as shown in
Figure 10.
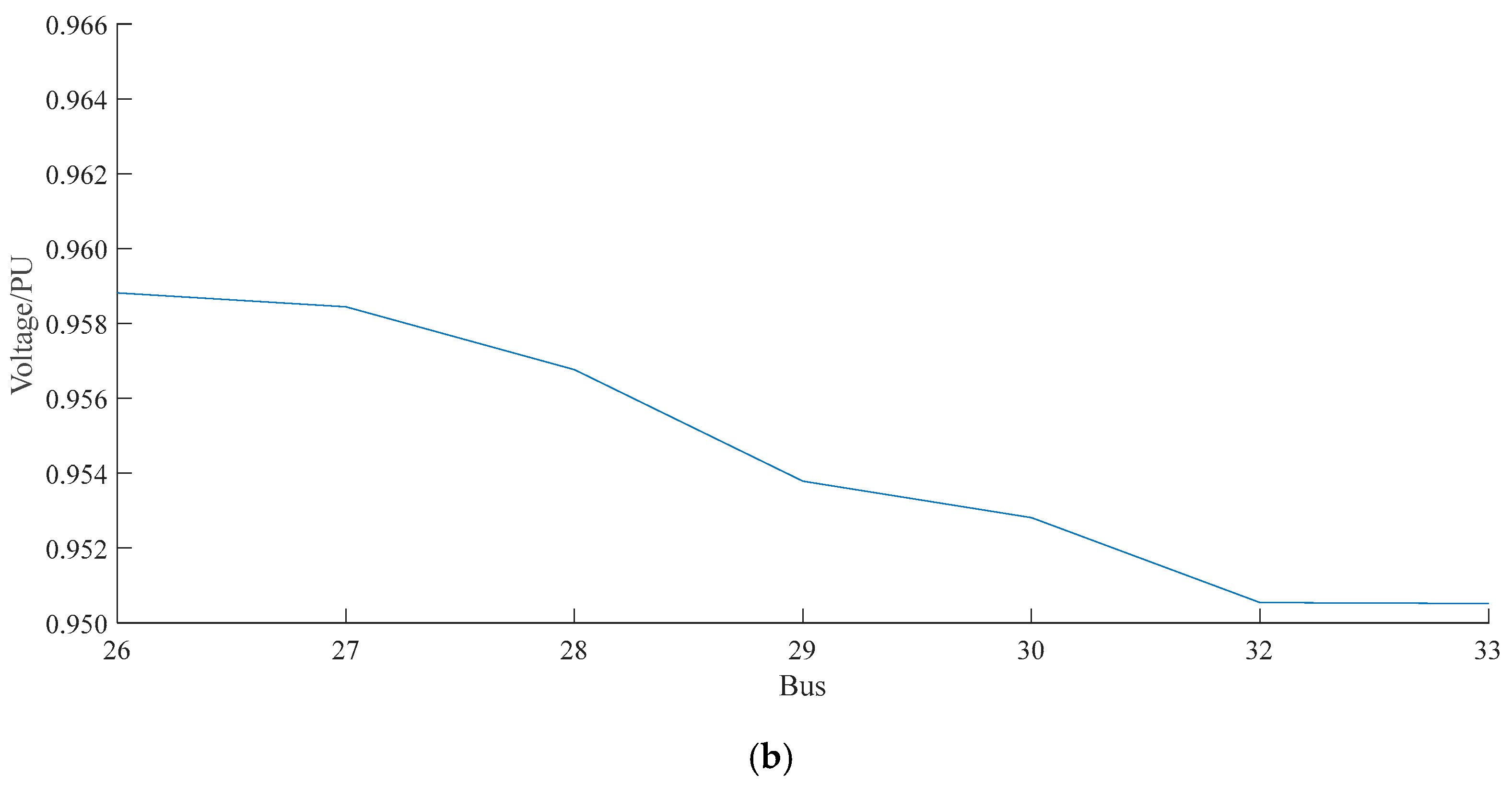
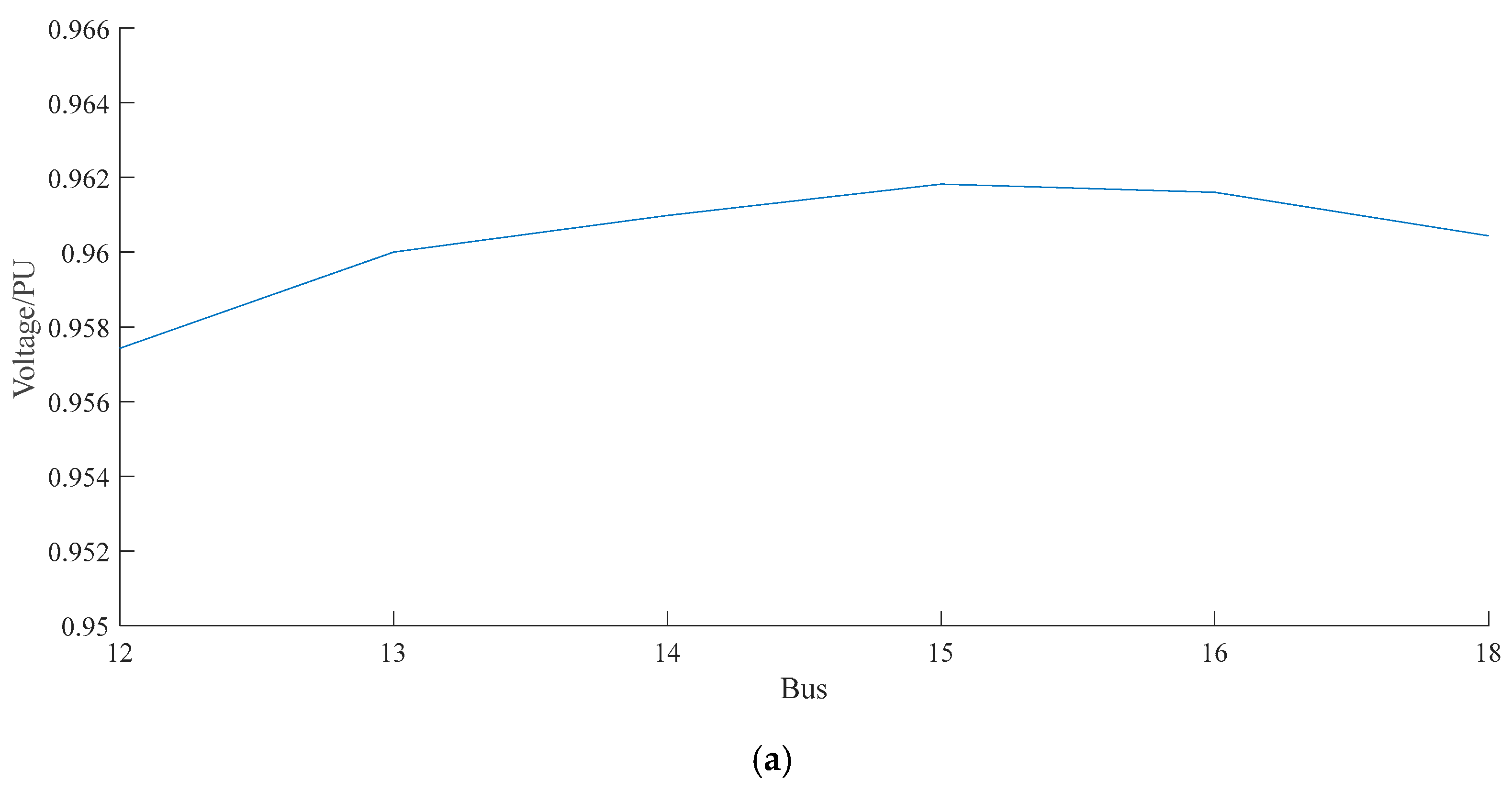
Figure 11 shows the minimum voltage of all buses in ARs 3 and 5 except buses 17 and 31 during the period of 20–180 min. Through active voltage control, the voltage of all buses is restored at 0.95 PU or more.
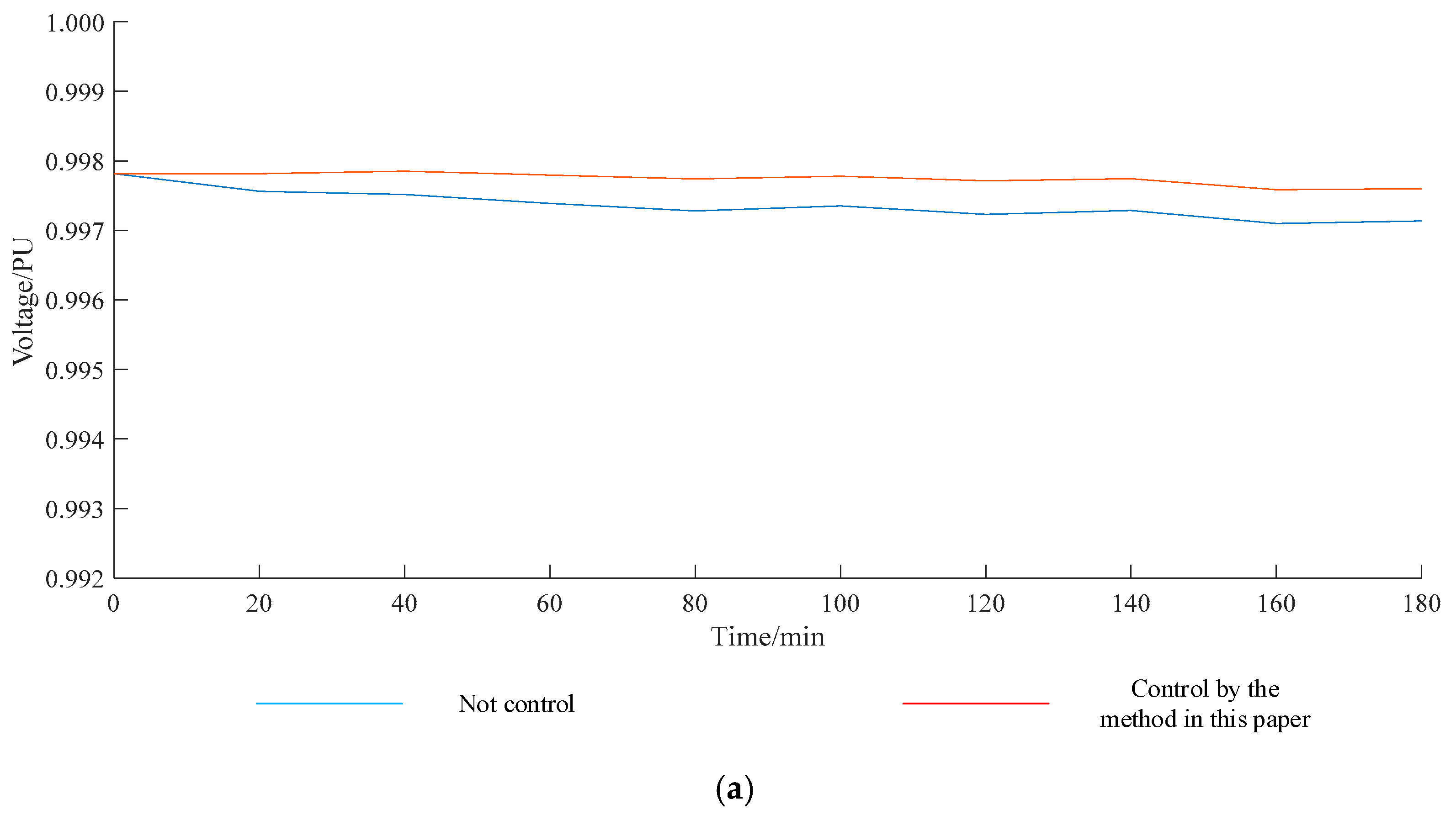
Figure 12 shows the lowest bus voltages in ARs 1, 2, and 4 before and after control. Although active power variation occurs in ARs 3 and 5, the bus voltage in the other three ARs are affected in varying degrees. The bus voltage of AR 4, which is directly connected to AR 5, is mostly affected by variation and falls below 0.95 PU after 160 min if not controlled. Adjusting the power of ARs 3 and 5 stabilizes the bus voltage in the other three ARs. The minimum voltage of AR 4 is restored to 0.97 PU.
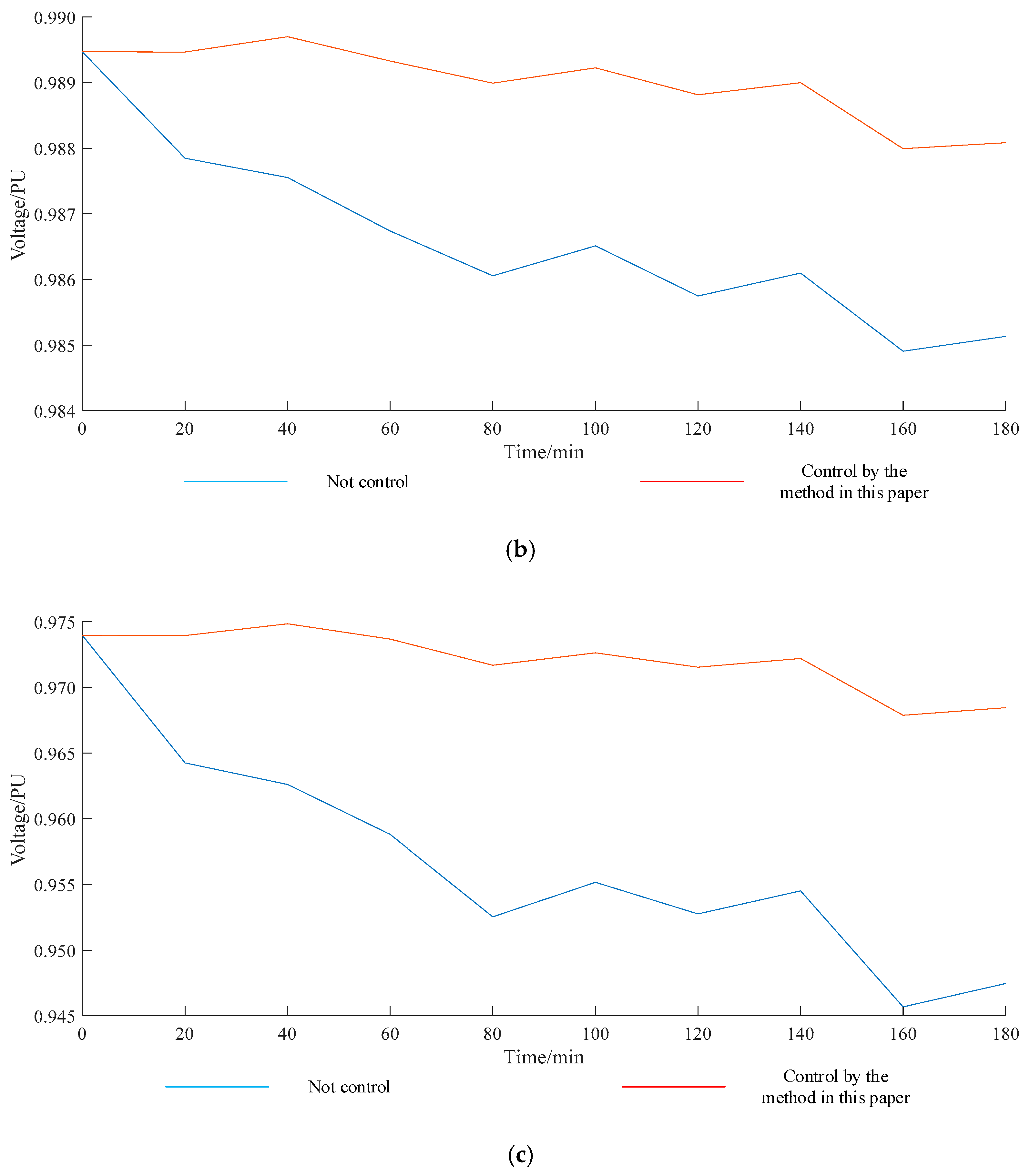
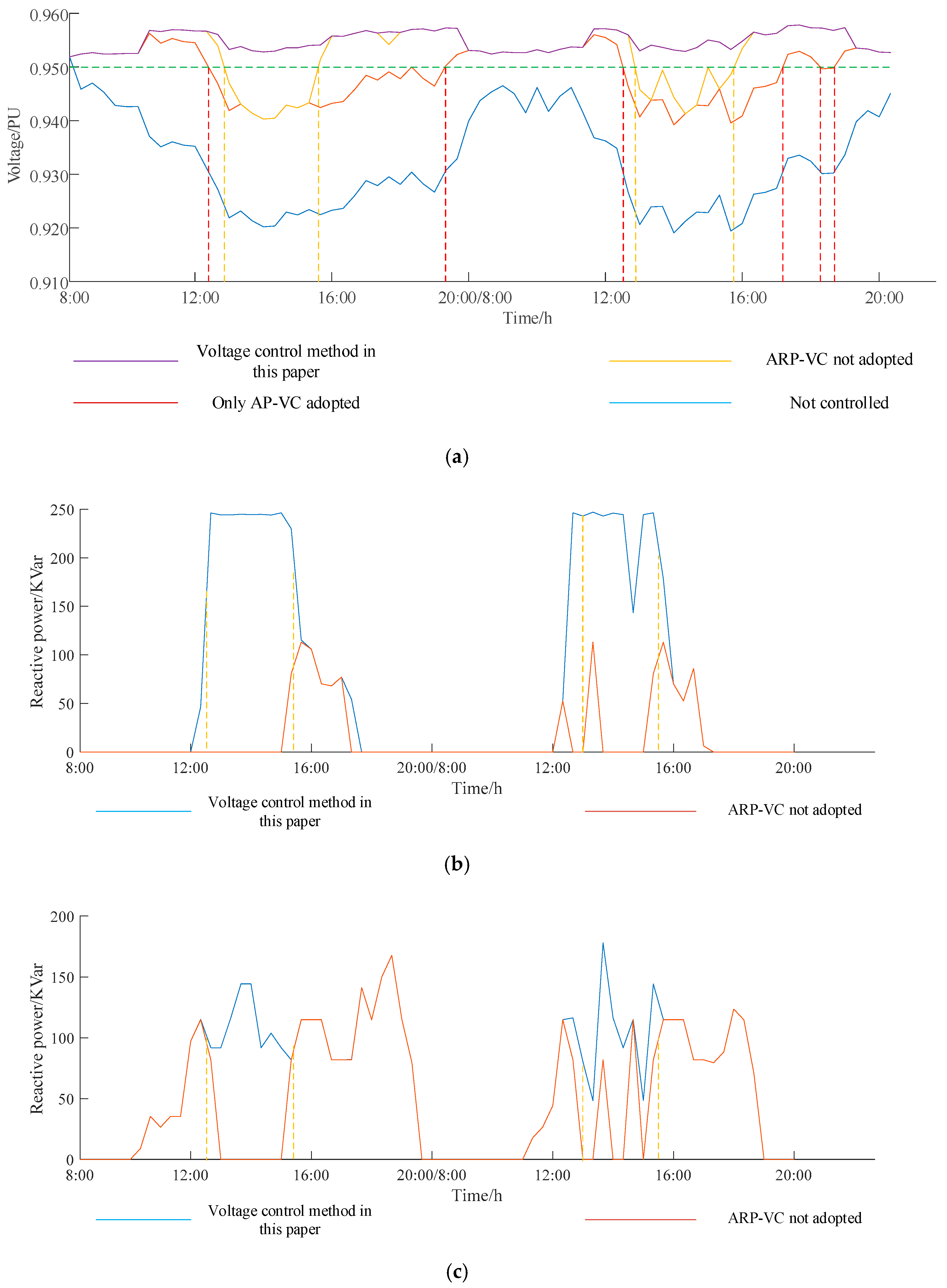
To verify that time has no effect on the method in this paper, the control effects of AR 3 from 8 am to 8 pm in two days is shown in
Figure 13. As the active power of loads and wind turbines changes, the voltage of bus 31 fluctuates greatly if not controlled and it drops under the lower limit for a long time; the lowest voltage is 0.9191. If controlled by the method in this paper and if the active power is fully compensated, the voltage is above 0.95PU and very stable. The lowest voltage is 0.9512 and the highest voltage is 0.9578. If ARP-VC is not adopted, the voltage is under 0.95PU from 12:40 to 15:40 during the first day and from 13:00 to 15:40 during the second day. This is due to the high active power output of wind turbines, which causes the wind power to fail to generate enough reactive power to support the voltage, as shown in
Figure 13b,c. If only the gas turbines are put into the voltage control, the voltage is under the lower limit from 12:20 to 19:20 during the first day and from 12:20 to 16:40 during the second day.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}