Effects of Bounded Uncertainties on the Dynamic Characteristics of an Overhung Rotor System with Rubbing Fault





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
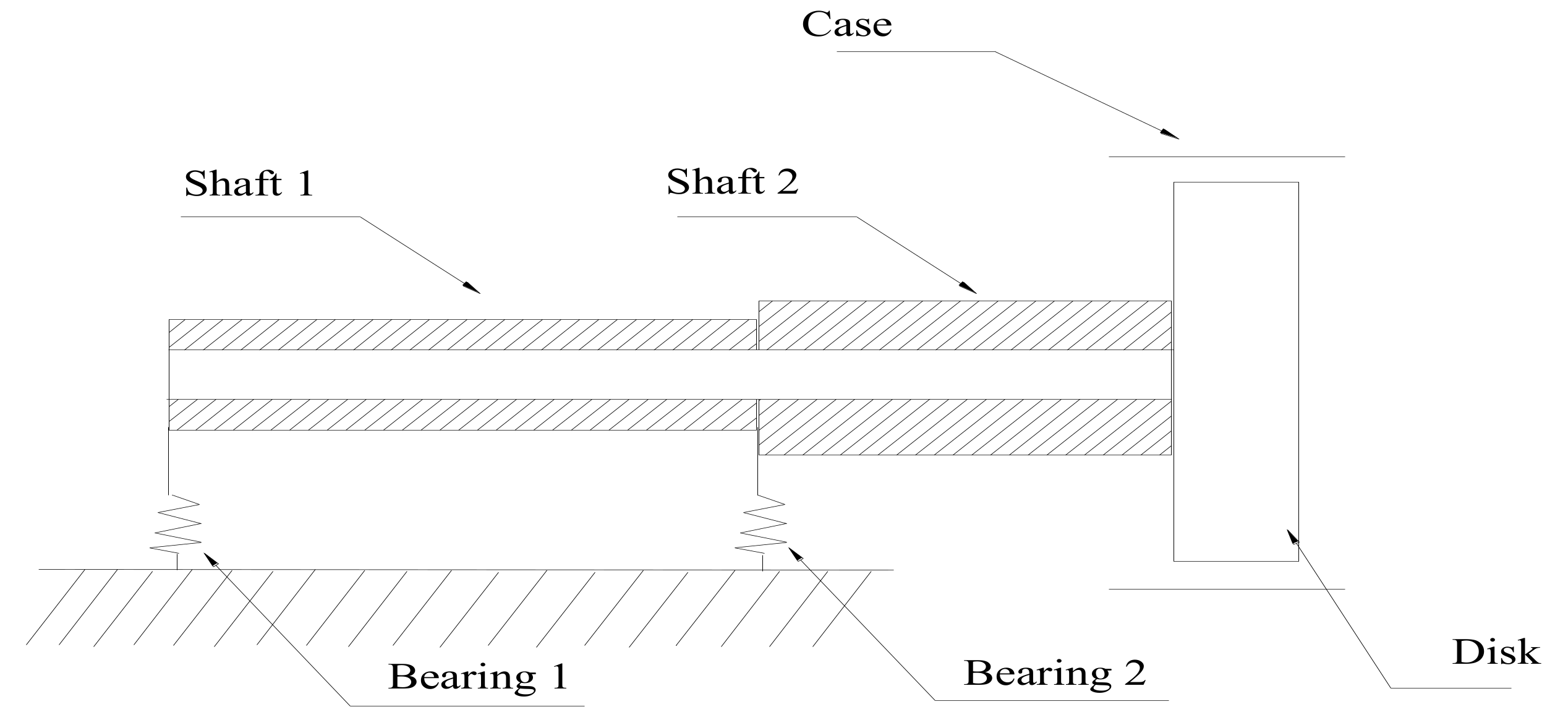
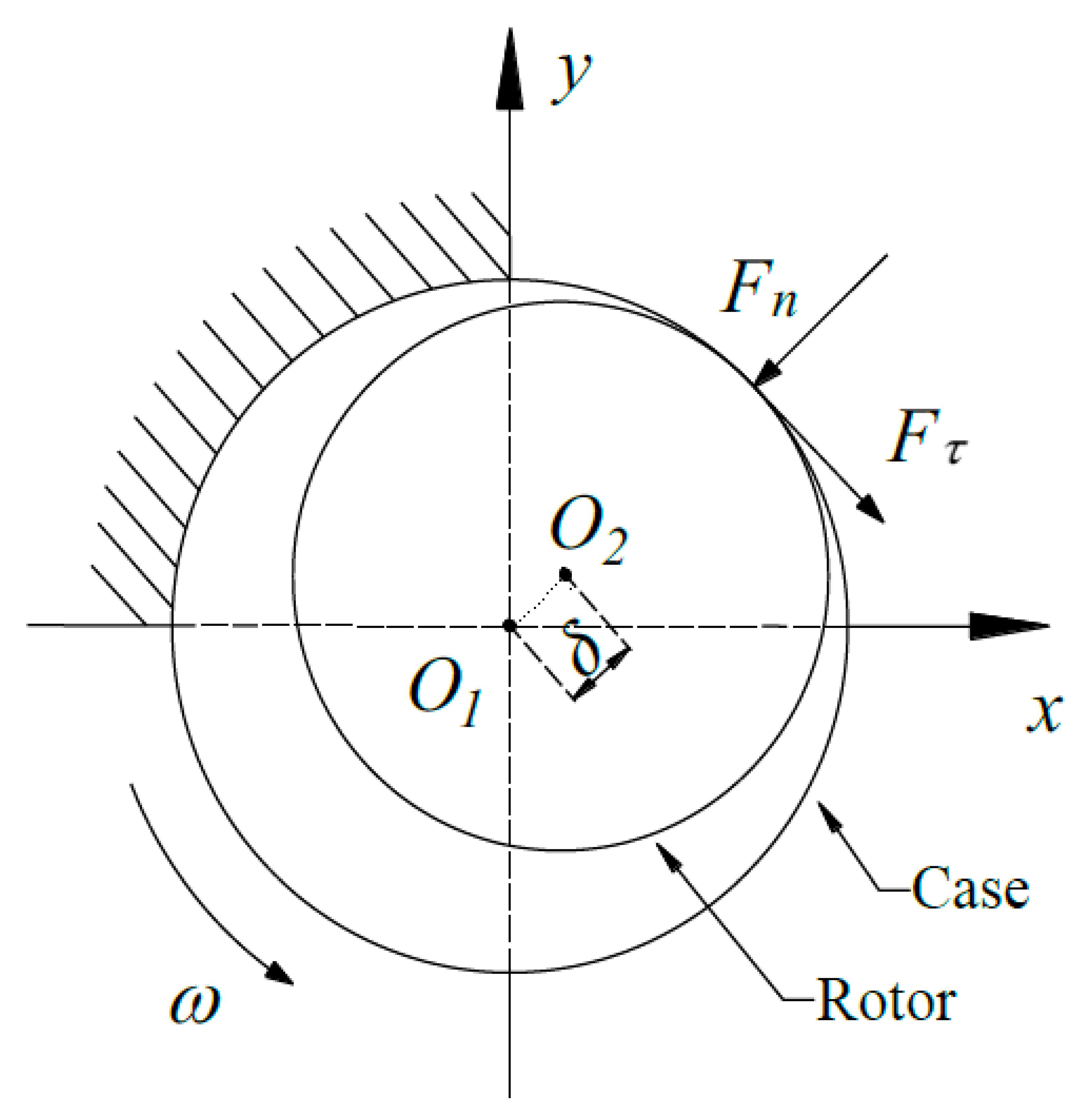
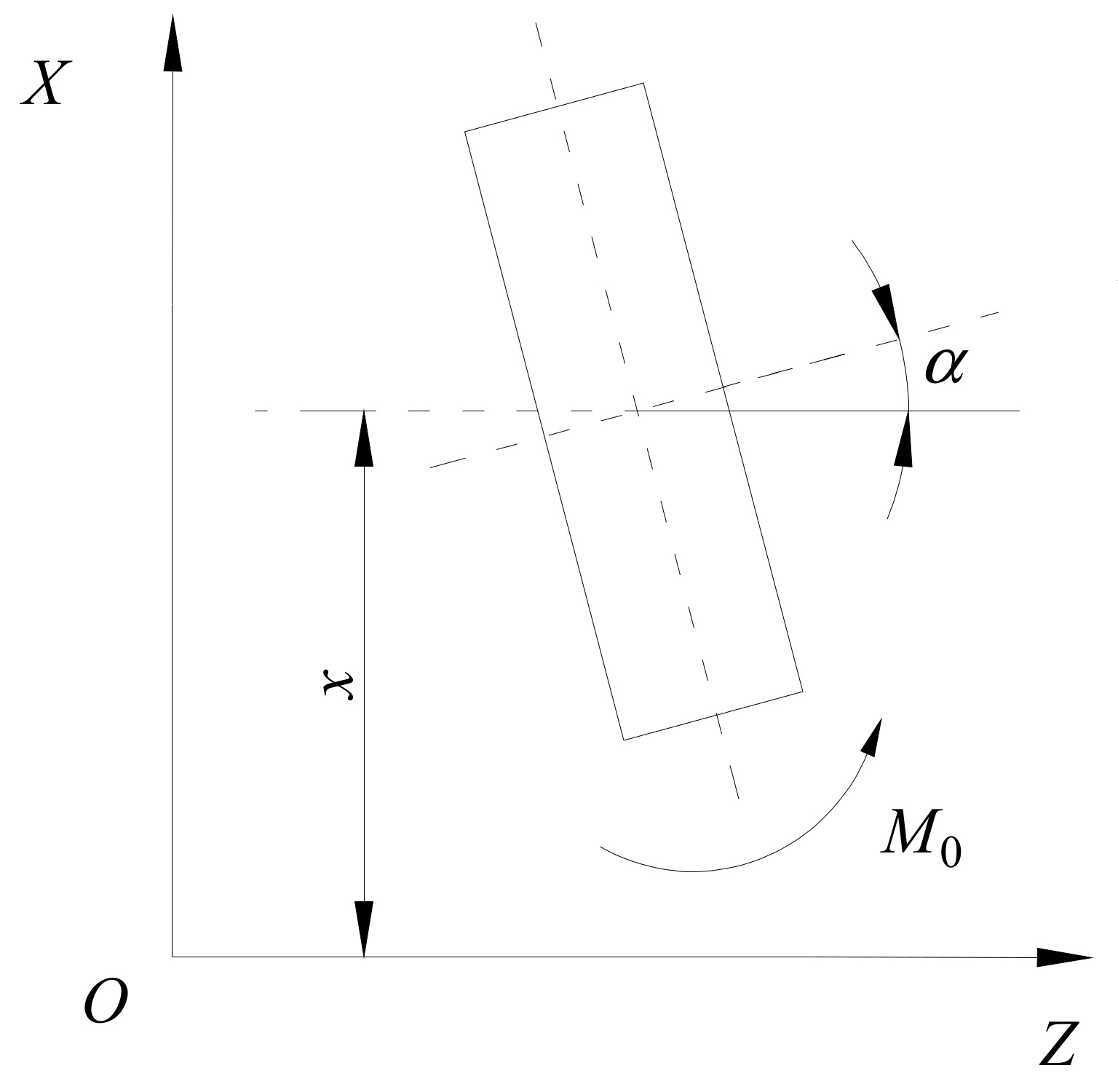
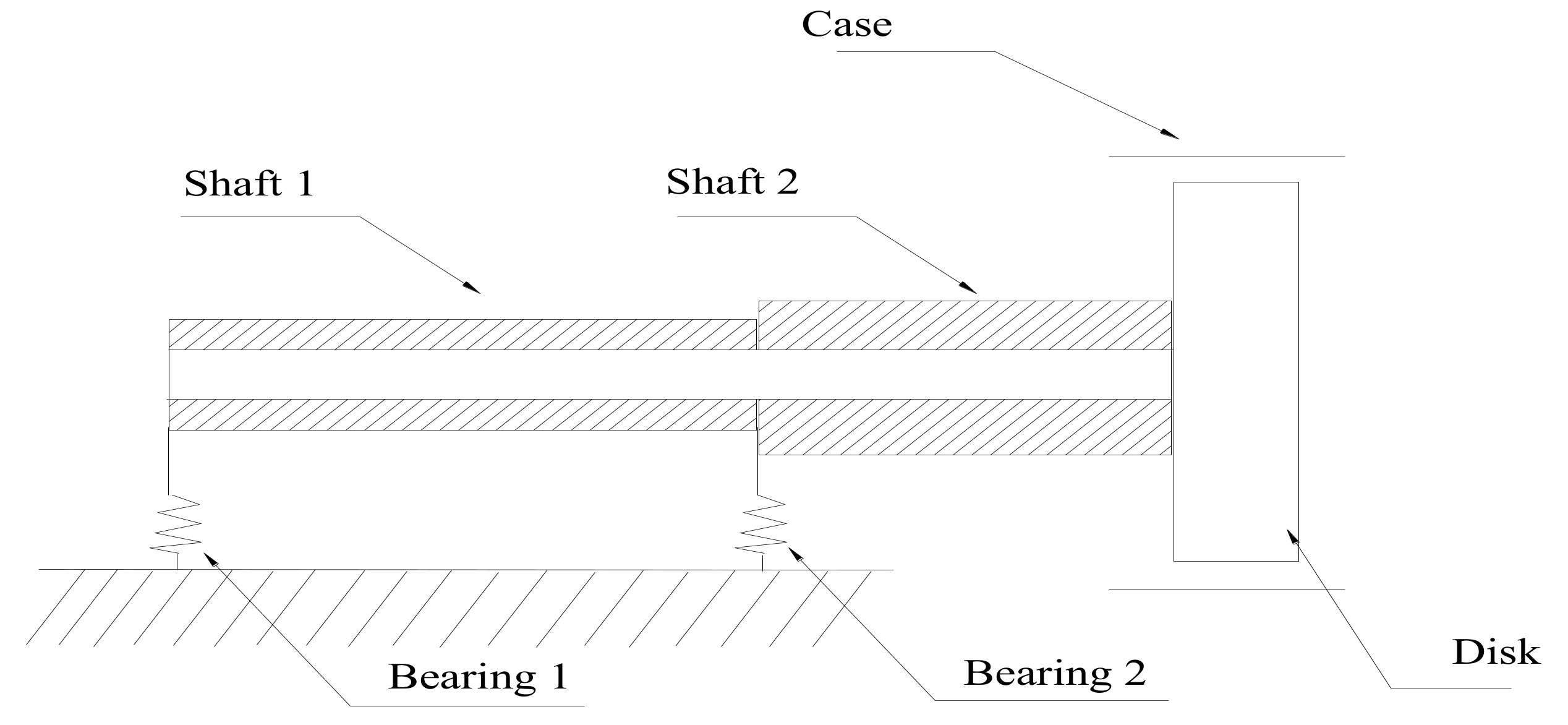
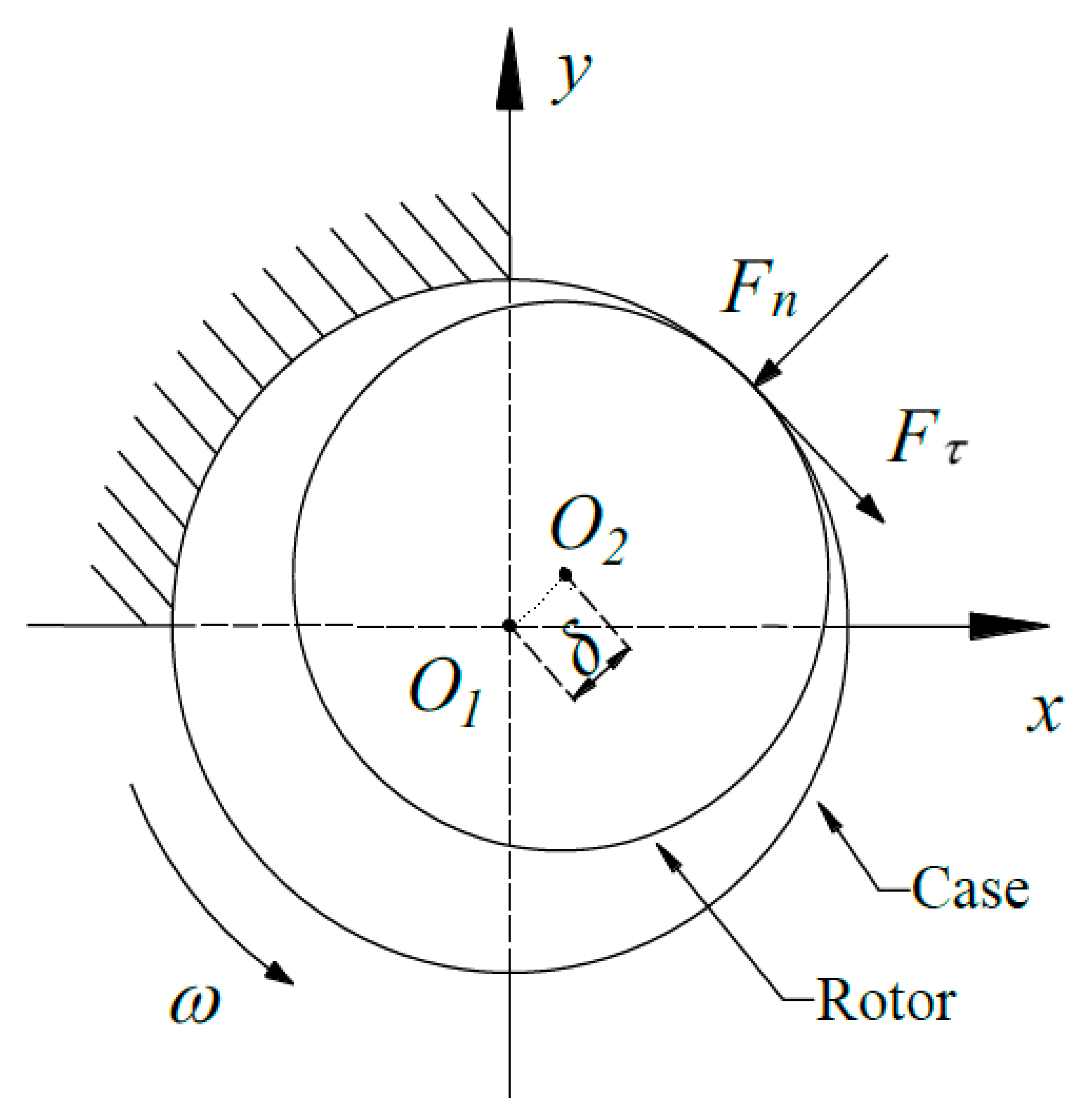
2. Motion Description of the Rubbing Rotor
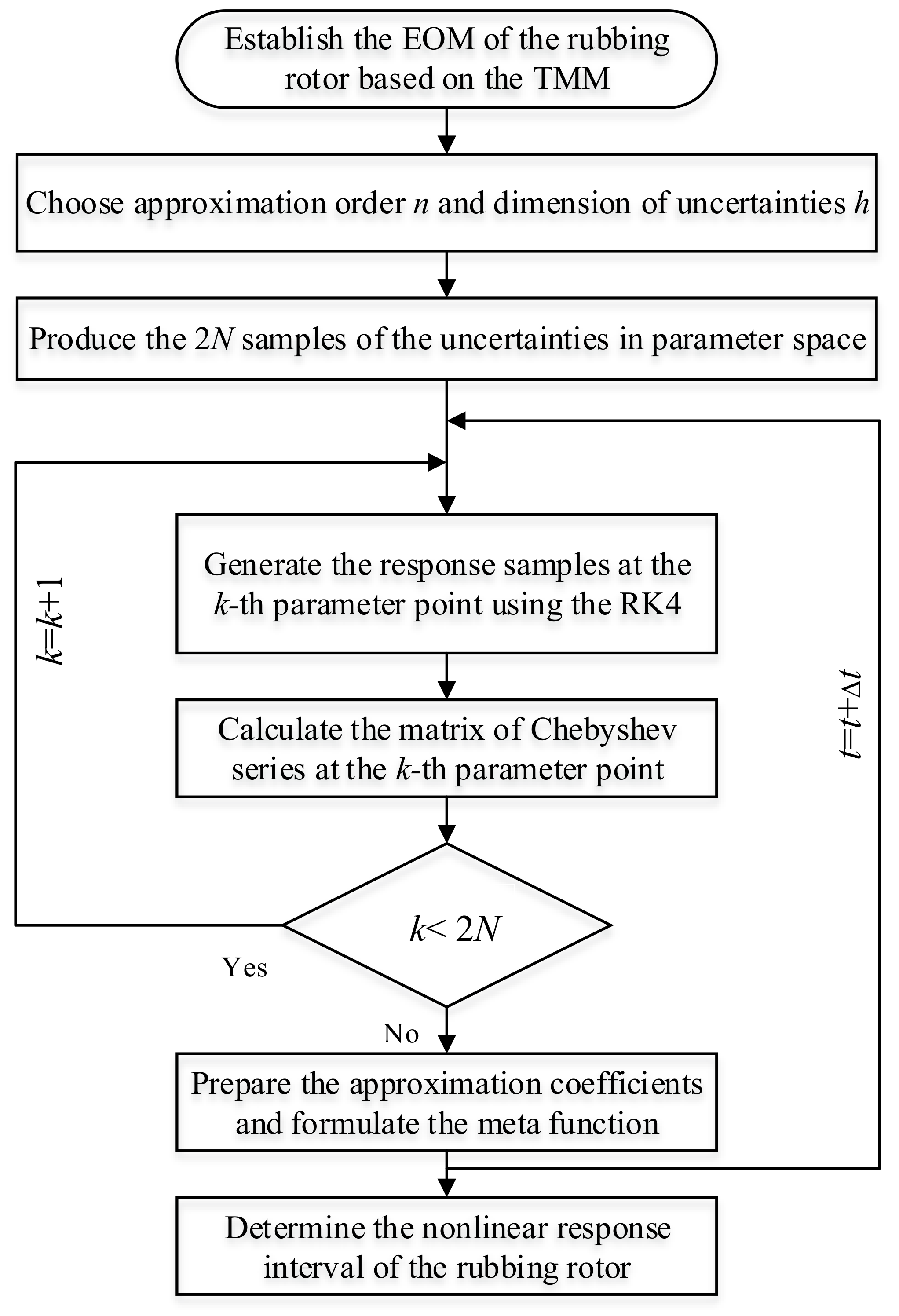
3. Nonlinear Vibrations Under Uncertainty
3.1. Bounded Uncertainties in Rubbing Fault
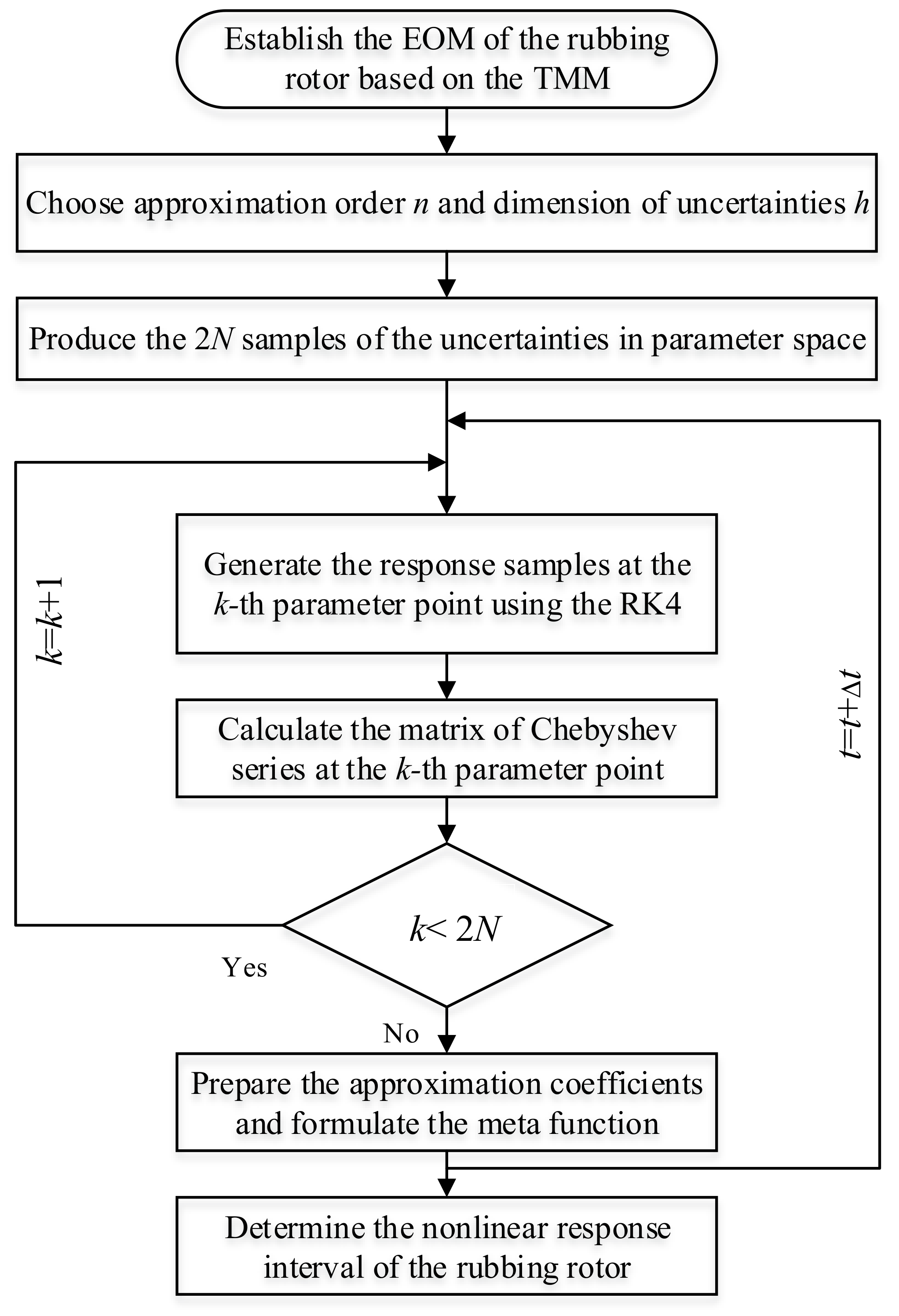
3.2. Uncertainty Analysis of the Response
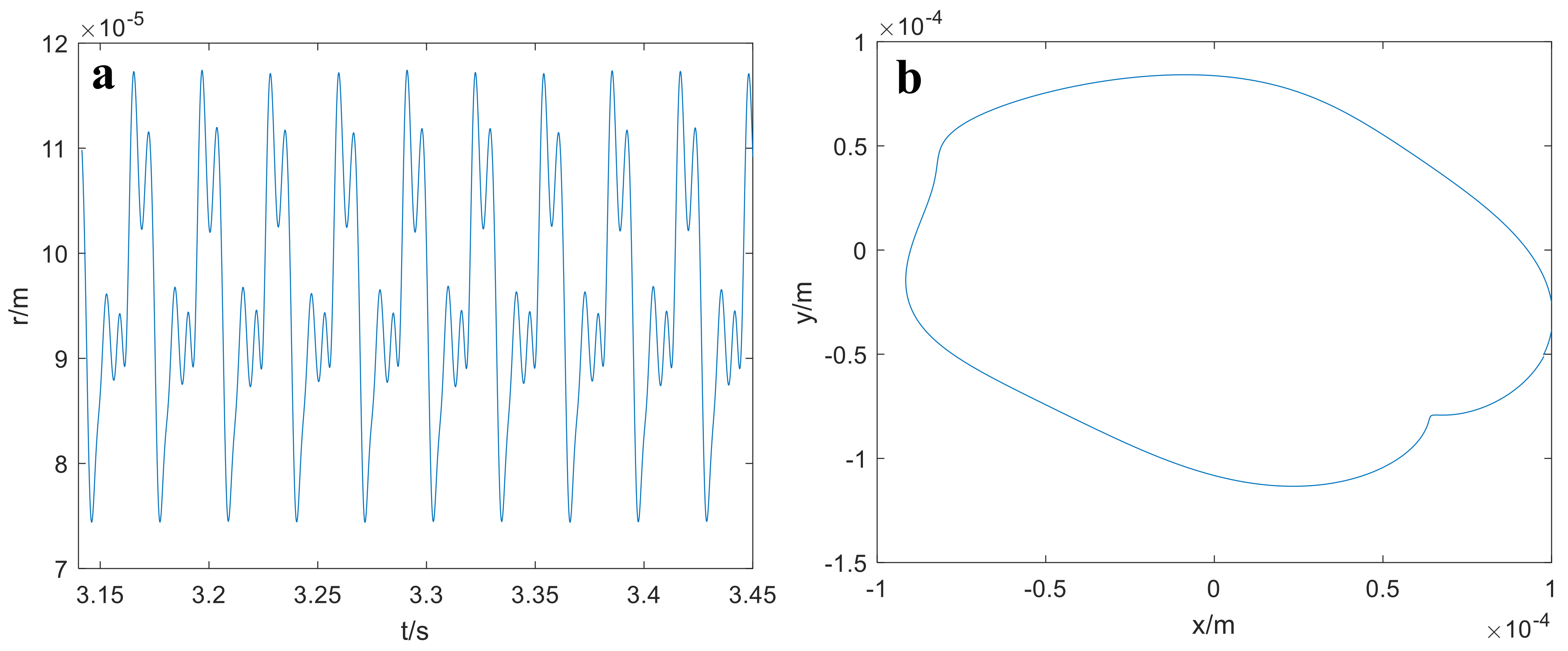
4. Numerical Results
5. Discussions
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xu, X.P.; Han, Q.K.; Chu, F.L. Review of electromagnetic vibration in electrical machines. Energies 2018, 11, 1779. [Google Scholar] [CrossRef]
- Hu, L.; Liu, Y.B.; Teng, W.; Zhou, C. Nonlinear coupled dynamics of a rod fastening rotor under rub-impact and initial permanent deflection. Energies 2016, 9, 883. [Google Scholar] [CrossRef]
- Wang, Z.L.; Yang, J.; Li, H.Y.; Zhen, D.; Xu, Y.D.; Gu, F.S. Fault identification of broken rotor bars in induction motors using an improved cyclic modulation spectral analysis. Energies 2019, 12, 3279. [Google Scholar] [CrossRef]
- Mokhtar, M.A.; Darpe, A.K.; Gupta, K. Experimental investigations on torsional vibrations of a rotor during a rotor-stator rub. In Proceedings of the International Conference on Rotor Dynamics, Rio de Janeiro, Brazil, 23–27 September 2018; pp. 534–544. [Google Scholar]
- Edwards, S.; Lees, A.W.; Friswell, M.I. The influence of torsion on rotor/stator contact in rotating machinery. J. Sound Vib. 1999, 225, 767–778. [Google Scholar] [CrossRef]
- Choy, F.K.; Padovan, J. Non-linear transient analysis of rotor-casing rub events. J. Sound Vib. 1987, 113, 529–545. [Google Scholar] [CrossRef]
- Jiang, J. The analytical solution and the existence condition of dry friction backward whirl in rotor-to-stator contact systems. J. Vib. Acoust. 2007, 129, 260–264. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, Y.Q.; Yang, Y.R.; Cao, D.Q. Dynamics characteristics of a rotor-casing system subjected to axial load and radial rub. Int. J. Nonlinear Mech. 2018, 99, 59–68. [Google Scholar] [CrossRef]
- Yang, W.X.; Tian, W.Y.; Hvalbye, O.; Peng, Z.K.; Wei, K.X.; Tian, X.L. Experimental research for stabilizing offshore floating wind turbines. Energies 2019, 12, 1947. [Google Scholar] [CrossRef]
- Chu, F.L.; Lu, W.X. Experimental observation of nonlinear vibrations in a rub-impact rotor system. J. Sound Vib. 2005, 283, 621–643. [Google Scholar] [CrossRef]
- Ge, X.B.; Luo, Z.; Ma, Y.; Liu, H.P.; Zhu, Y.P. A novel data-driven model based parameter estimation of nonlinear systems. J. Sound Vib. 2019, 453, 188–200. [Google Scholar] [CrossRef]
- Hu, N.Q.; Chen, M.; Wen, X.S. The application of stochastic resonance theory for early detecting rub-impact fault of rotor system. Mech. Syst. Signal Process 2001, 17, 883–895. [Google Scholar] [CrossRef]
- Qin, W.Y.; Su, H.; Yang, Y.F. Grazing bifurcation and chaos in response of rubbing rotor. Chaos Solitons Fract. 2008, 37, 166–174. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, Y.L.; Lang, Z.Q.; Li, J.T.; Yan, X.X.; Zhao, S.Y. Weighted contribution rate of nonlinear output frequency response functions and its application to rotor system fault diagnosis. J. Sound Vib. 2019, 460, 114882. [Google Scholar] [CrossRef]
- Peng, Z.K.; Chu, F.L.; Tse, P.W. Detection of the rubbing-caused impacts for rotor–stator fault diagnosis using reassigned scalogram. Mech. Syst. Signal Process 2005, 19, 391–409. [Google Scholar] [CrossRef]
- Ma, H.; Zhao, Q.B.; Zhao, X.Y.; Han, Q.K.; Wen, B.C. Dynamic characteristics analysis of a rotor–stator system under different rubbing forms. Appl. Math. Model. 2015, 39, 2392–2408. [Google Scholar] [CrossRef]
- Sun, Q.; Ma, H.; Zhu, Y.P.; Han, Q.K.; Wen, B.C. Comparison of rubbing induced vibration responses using varying-thickness-twisted shell and solid-element blade models. Mech. Syst. Signal Process 2018, 108, 1–20. [Google Scholar] [CrossRef]
- Fay, R.; Kreuzer, D.; Liebich, R.; Wiedemann, T.; Werner, S. Numerical results of the influence of thermal effects on the turbo machine rotordynamics induced by light-rubs against a brush seal. J. Sound Vib. 2018, 425, 70–81. [Google Scholar] [CrossRef]
- Sun, C.Z.; Chen, Y.S.; Hou, L. Nonlinear dynamical behaviors of a complicated dual-rotor aero-engine with rub-impact. Arch. Appl. Mech. 2018, 88, 1305–1324. [Google Scholar] [CrossRef]
- Sinou, J.-J.; Nechak, L.; Besset, S. Kriging metamodeling in rotordynamics: Application for predicting critical speeds and vibrations of a flexible rotor. Complexity 2018. [Google Scholar] [CrossRef]
- Lin, S.-Y.; Lin, A.-C. Risk-kimiting scheduling of optimal non-renewable power generation for systems with uncertain power generation and load demand. Energies 2016, 9, 868. [Google Scholar] [CrossRef]
- Mazaher, H.B.; Yousefi, G.; Claus, B.; Jayakrishnan, R.P. Long term expected revenue of wind farms considering the bidding admission uncertainty. Energies 2016, 9, 945. [Google Scholar]
- Yang, Y.F.; Wu, Q.Y.; Wang, Y.L.; Qin, W.Y.; Lu, K. Dynamic characteristics of cracked uncertain hollow-shaft. Mech. Syst. Signal Process 2019, 124, 36–48. [Google Scholar]
- Lu, K.; Jin, Y.L.; Chen, Y.S.; Yang, Y.F.; Hou, L.; Zhang, Z.Y.; Li, Z.G.; Fu, C. Review for order reduction based on proper orthogonal decomposition and outlooks of applications in mechanical systems. Mech. Syst. Signal Process 2019, 123, 264–297. [Google Scholar] [CrossRef]
- Fu, C.; Xu, Y.D.; Yang, Y.F.; Lu, K.; Gu, F.S.; Ball, A. Response analysis of an accelerating unbalanced rotating system with both random and interval variables. J. Sound Vib. 2019, 466, 115047. [Google Scholar] [CrossRef]
- Qin, Z.Y.; Pang, X.J.; Safaei, B.; Chu, F.L. Free vibration analysis of rotating functionally graded CNT reinforced composite cylindrical shells with arbitrary boundary conditions. Compos. Struct. 2019, 220, 847–860. [Google Scholar] [CrossRef]
- Elishakoff, I.; Cai, G.Q.; Starnes, J.H., Jr. Non-linear buckling of a column with initial imperfection via stochastic and non-stochastic convex models. Int. J. Nonlinear Mech. 1994, 29, 71–82. [Google Scholar] [CrossRef]
- Fu, C.; Ren, X.M.; Yang, Y.F.; Lu, K.; Qin, W.Y. Steady-state response analysis of cracked rotors with uncertain-but-bounded parameters using a polynomial surrogate method. Commun. Nonlinear Sci. Numer. Simul. 2019, 68, 240–256. [Google Scholar] [CrossRef]
- Cavalini, A.A.; Silva, A.D.G.; Lara-Molina, F.A.; Steffen, V. Dynamic analysis of a flexible rotor supported by hydrodynamic bearings with uncertain parameters. Meccanica 2017, 52, 2931–2943. [Google Scholar] [CrossRef]
- Didier, J.; Sinou, J.-J.; Faverjon, B. Study of the non-linear dynamic response of a rotor system with faults and uncertainties. J. Sound Vib. 2012, 331, 671–703. [Google Scholar] [CrossRef]
- Jacquelin, E.; Adhikari, S.; Sinou, J.-J.; Friswell, M.I. Polynomial chaos expansion in structural dynamics: Accelerating the convergence of the first two statistical moment sequences. J. Sound Vib. 2015, 356, 144–154. [Google Scholar] [CrossRef]
- Fu, C.; Ren, X.M.; Yang, Y.F. Vibration analysis of rotors under uncertainty based on Legendre series. J. Vib. Eng. Technol. 2019, 7, 43–51. [Google Scholar] [CrossRef]
- Dimarogonas, A.D. Interval analysis of vibrating systems. J. Sound Vib. 1995, 183, 739–749. [Google Scholar] [CrossRef]
- Fu, C.; Ren, X.M.; Yang, Y.F.; Xia, Y.B.; Deng, W.Q. An interval precise integration method for transient unbalance response analysis of rotor system with uncertainty. Mech. Syst. Signal Process 2018, 107, 137–148. [Google Scholar] [CrossRef]
- Zhang, Y.M.; Wen, B.C.; Liu, Q.L. Uncertain responses of rotor-stator systems with rubbing. JSME Int. J. 2004, 46, 150–154. [Google Scholar] [CrossRef]
- Yang, L.C.; Zhang, J.G.; Guo, Y.L. Uncertainty representation and quantification for a nonlinear rotor/stator system with mixed uncertainties. J. Vibroeng. 2016, 18, 4836–4851. [Google Scholar] [CrossRef]
- Sinou, J.-J.; Didier, J.; Faverjon, B. Stochastic non-linear response of a flexible rotor with local non-linearities. Int. J. Nonlinear Mech. 2015, 74, 92–99. [Google Scholar] [CrossRef]
- Murthy, R.; Tomei, J.C.; Wang, X.Q.; Mignolet, M.P.; El-Shafei, A. Nonparametric stochastic modeling of structural uncertainty in rotordynamics: Unbalance and balancing aspects. J. Eng. Gas Turb. Power 2014, 136, 062506. [Google Scholar] [CrossRef]
- Zhou, S.T.; Wu, X.; Li, H.G. Critical speed analysis of flexible rotor system with stochastic uncertain parameters. J. Vib. Eng. Technol. 2017, 5, 319–328. [Google Scholar]
- Wu, J.L.; Zhang, Y.Q.; Chen, L.P.; Luo, Z. A Chebyshev interval method for nonlinear dynamic systems under uncertainty. Appl. Math. Model. 2013, 37, 4578–4591. [Google Scholar] [CrossRef]
- Wu, J.L.; Luo, Z.; Zhang, N.; Zhang, Y.Q. A new interval uncertain optimization method for structures using Chebyshev surrogate models. Comput. Struct. 2015, 146, 185–196. [Google Scholar] [CrossRef]
- Fu, C.; Ren, X.M.; Yang, Y.F.; Qin, W.Y. Dynamic response analysis of an overhung rotor with interval uncertainties. Nonlinear Dyn. 2017, 89, 2115–2124. [Google Scholar] [CrossRef]



© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, C.; Zhen, D.; Yang, Y.; Gu, F.; Ball, A. Effects of Bounded Uncertainties on the Dynamic Characteristics of an Overhung Rotor System with Rubbing Fault. Energies 2019, 12, 4365. https://doi.org/10.3390/en12224365
Fu C, Zhen D, Yang Y, Gu F, Ball A. Effects of Bounded Uncertainties on the Dynamic Characteristics of an Overhung Rotor System with Rubbing Fault. Energies. 2019; 12(22):4365. https://doi.org/10.3390/en12224365
Chicago/Turabian StyleFu, Chao, Dong Zhen, Yongfeng Yang, Fengshou Gu, and Andrew Ball. 2019. "Effects of Bounded Uncertainties on the Dynamic Characteristics of an Overhung Rotor System with Rubbing Fault" Energies 12, no. 22: 4365. https://doi.org/10.3390/en12224365
APA StyleFu, C., Zhen, D., Yang, Y., Gu, F., & Ball, A. (2019). Effects of Bounded Uncertainties on the Dynamic Characteristics of an Overhung Rotor System with Rubbing Fault. Energies, 12(22), 4365. https://doi.org/10.3390/en12224365