Energy Efficient Cooperative Computation Algorithm in Energy Harvesting Internet of Things



Abstract
:1. Introduction
2. Related Works
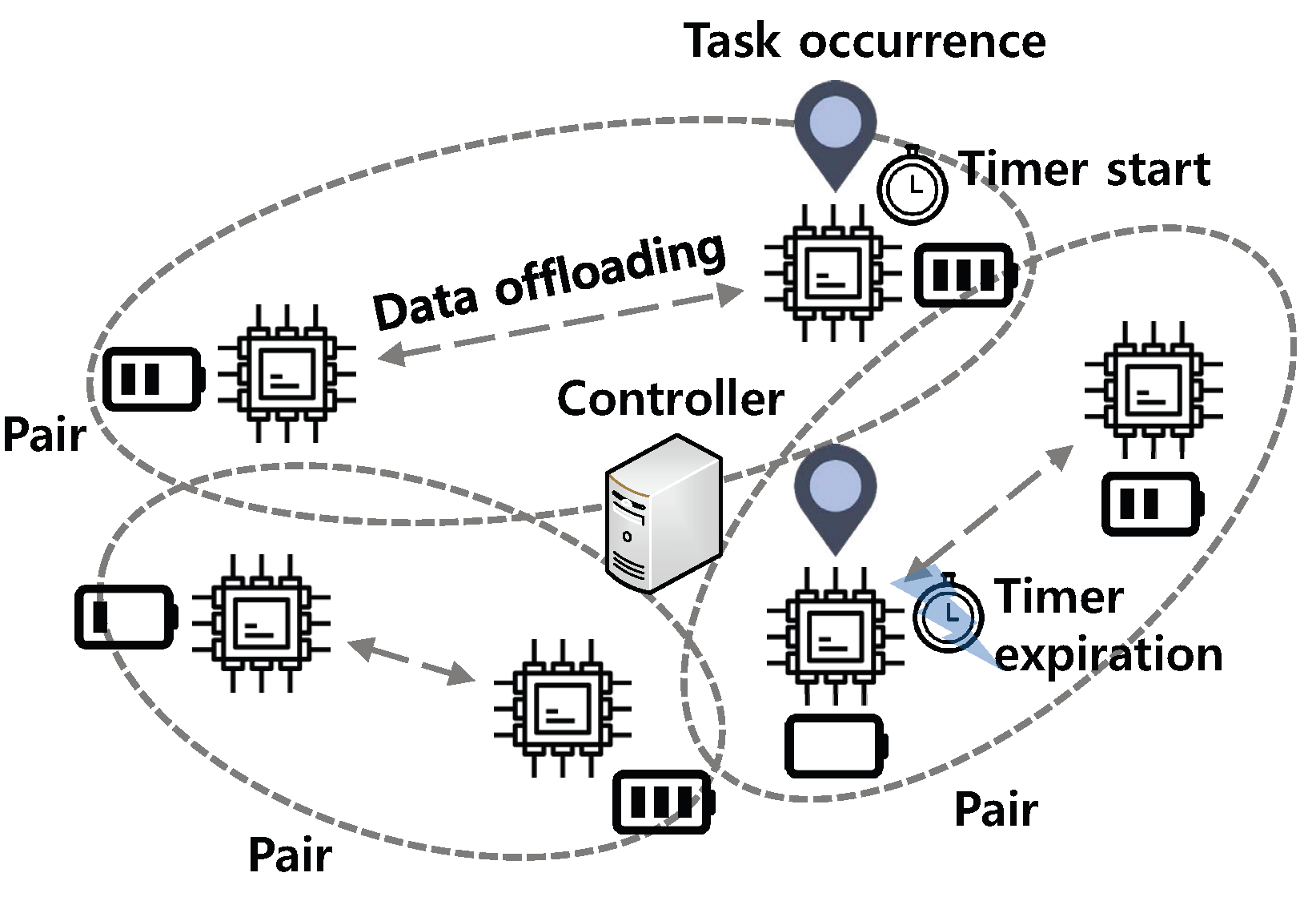
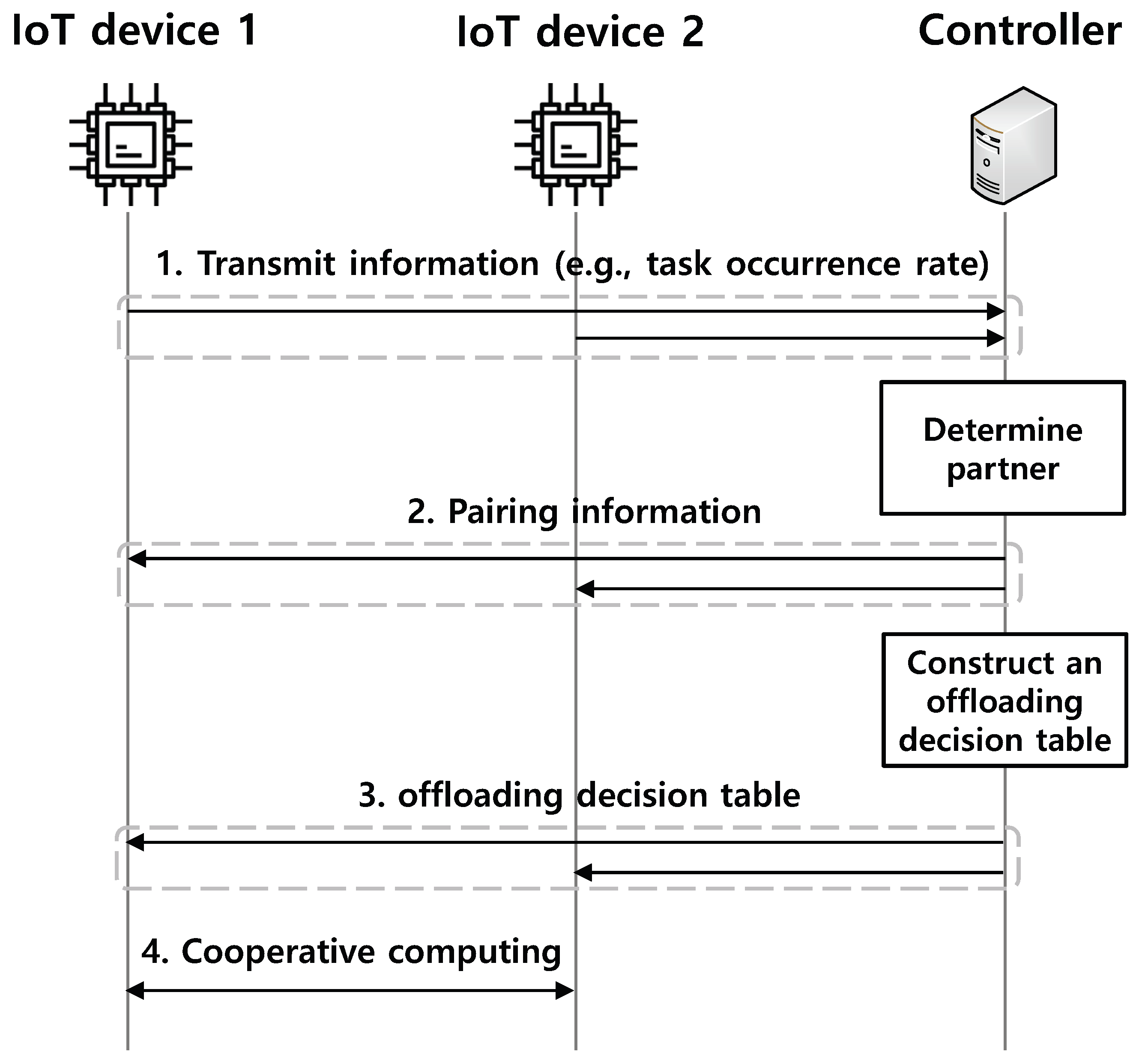
3. Energy Efficient Cooperative Computation Algorithm (EE-CCA)
4. Constraint Markov Decision Process (CMDP)
4.1. Decision Epoch
4.2. State Space
4.3. Action Space
4.4. Transition Probability
4.5. Cost and Constraint Functions
4.5.1. Cost Function
4.5.2. Constraint Function
4.6. Optimization Problem Formulation
4.7. IoT Device Pairing Problem
5. Evaluation Results
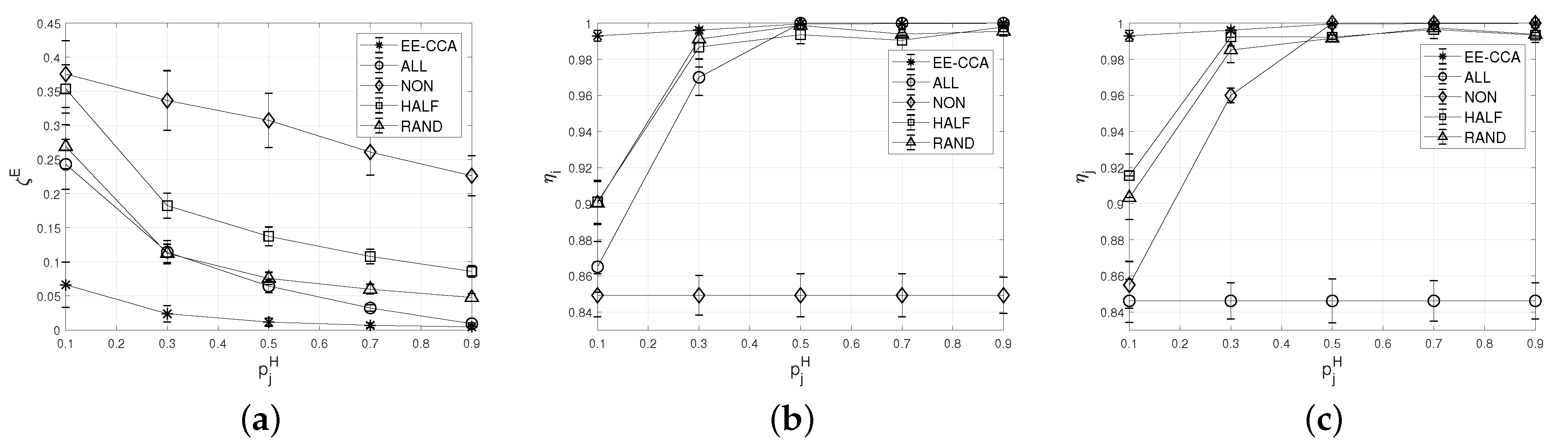
5.1. Effect of the Harvesting Probability
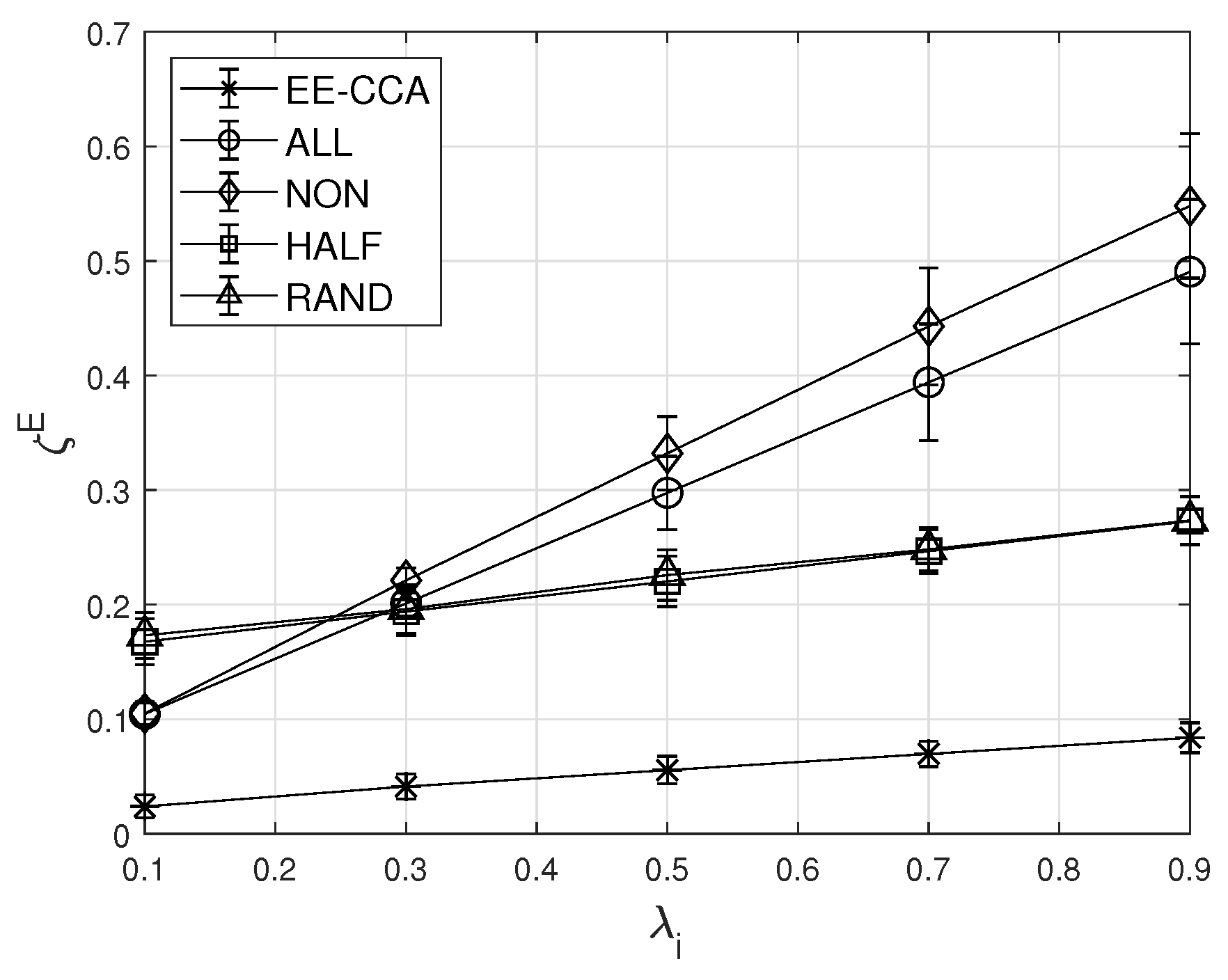
5.2. Effect of the Inter-Task Occurrence Rate
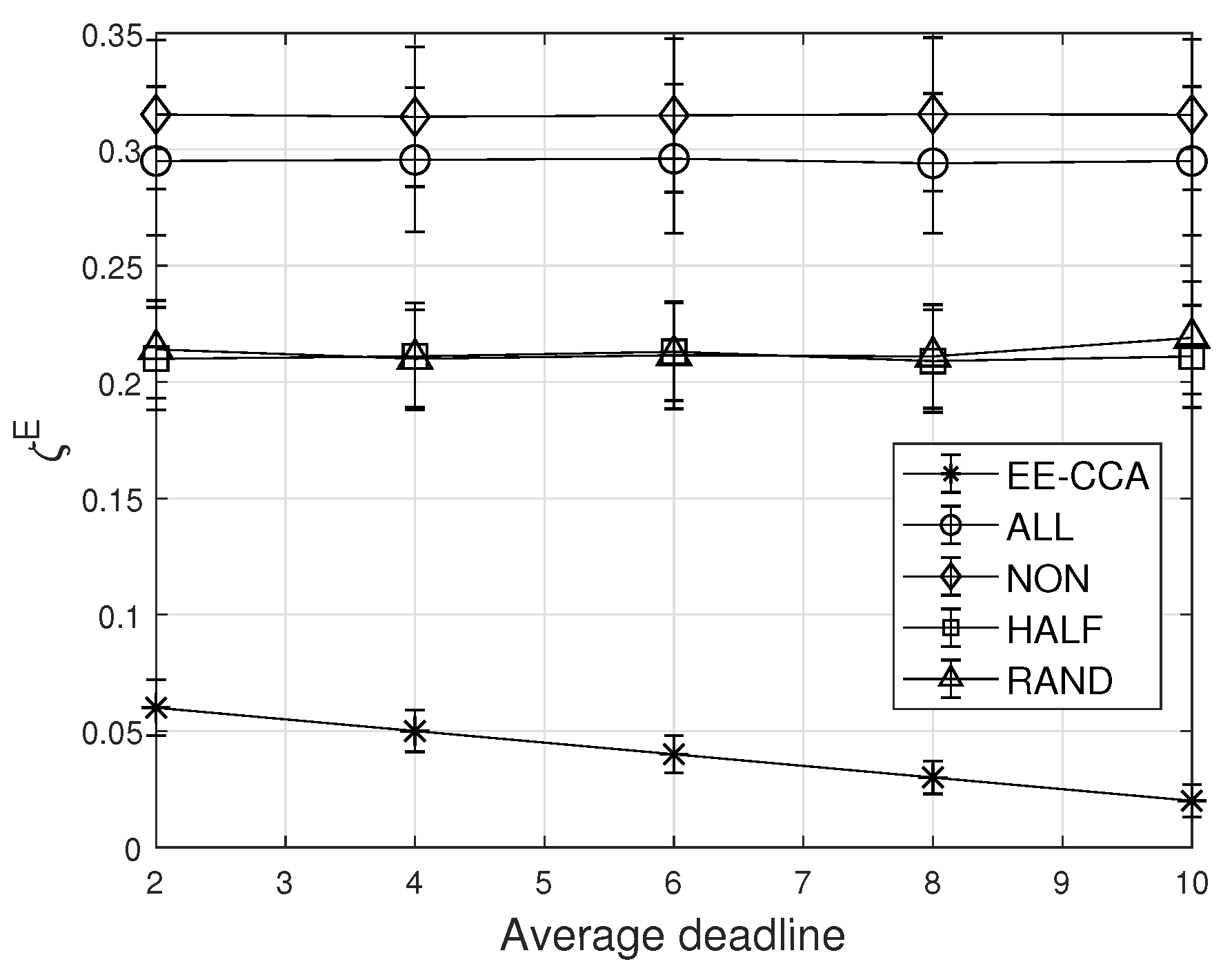
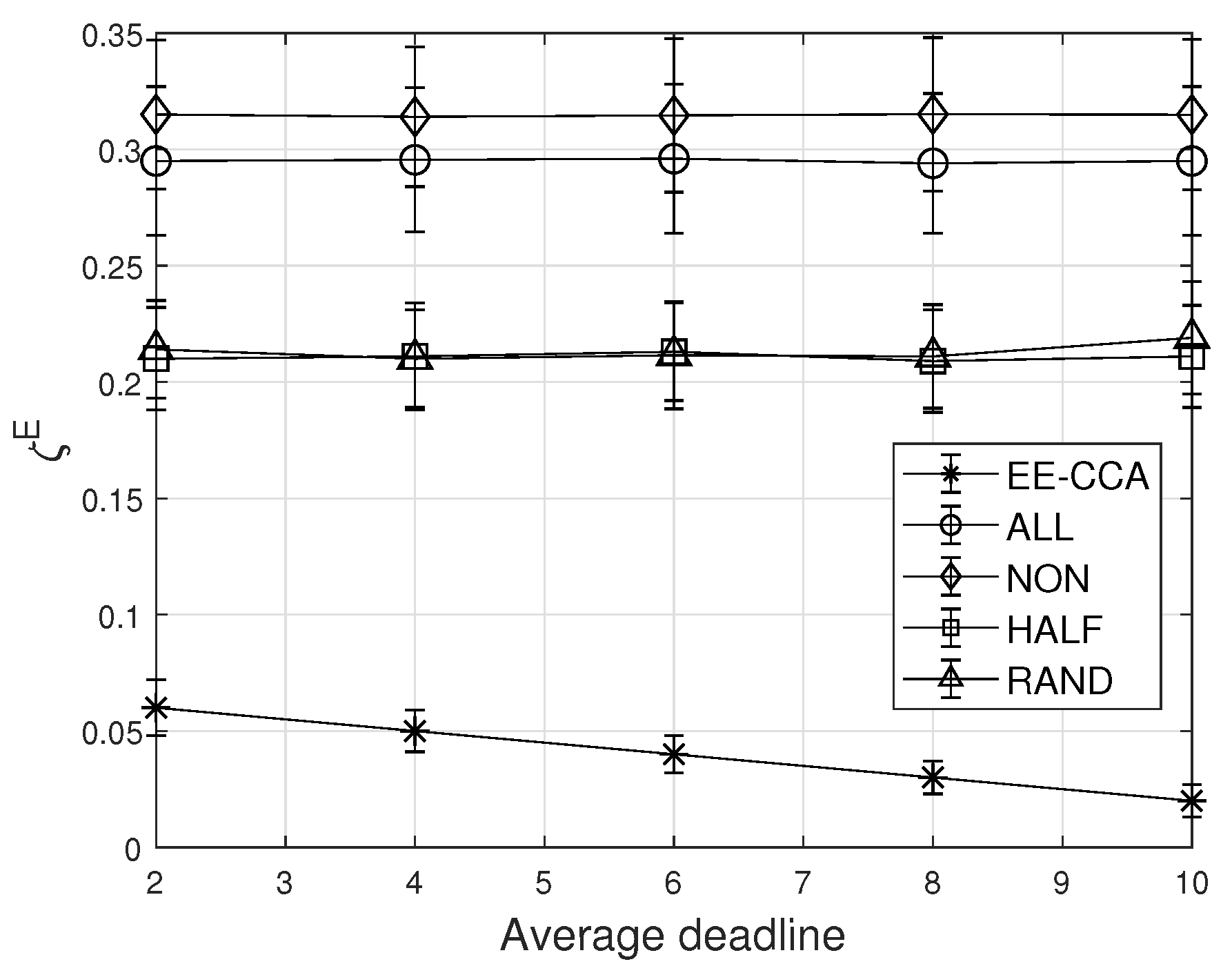
5.3. Effect of the Average Deadline
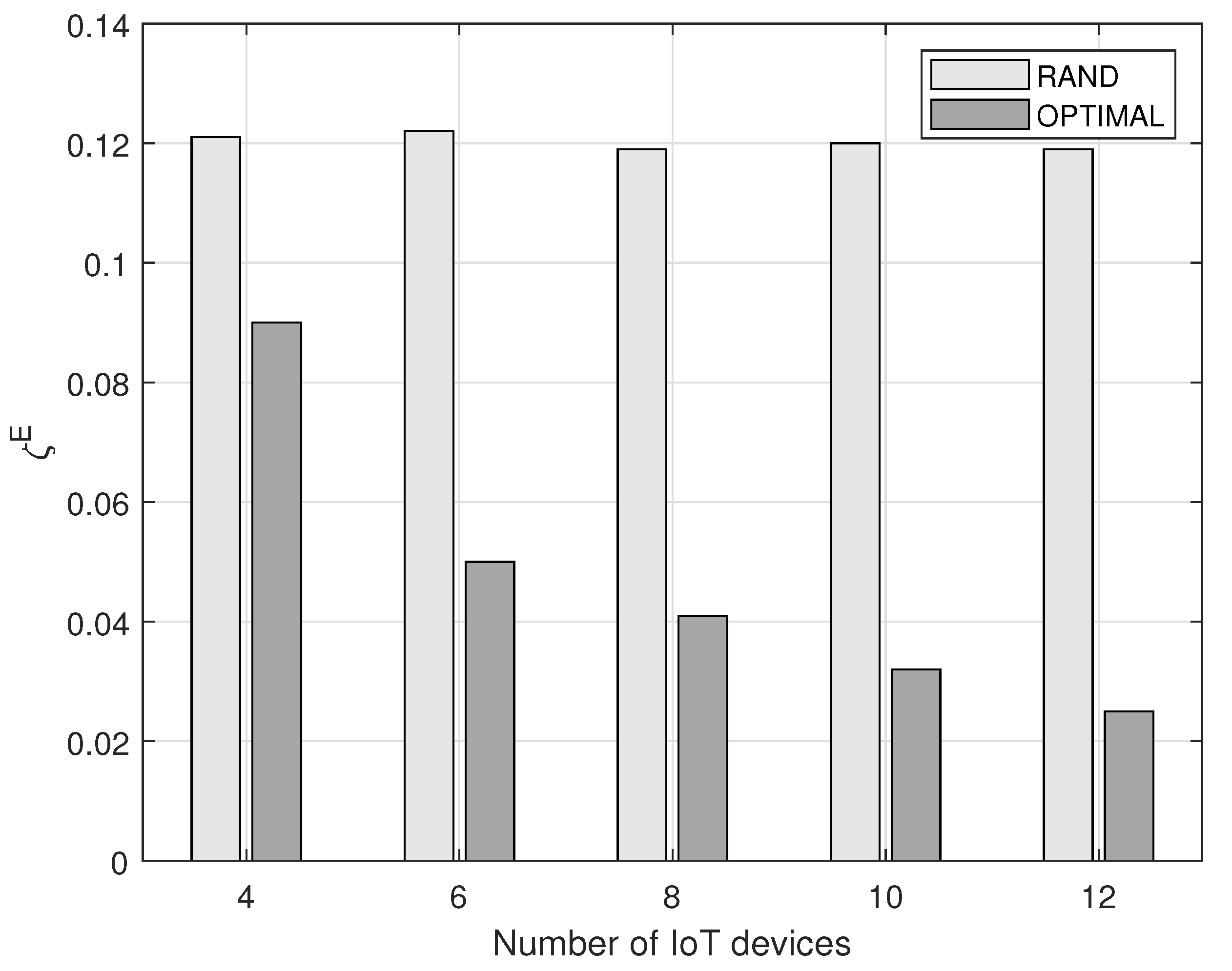
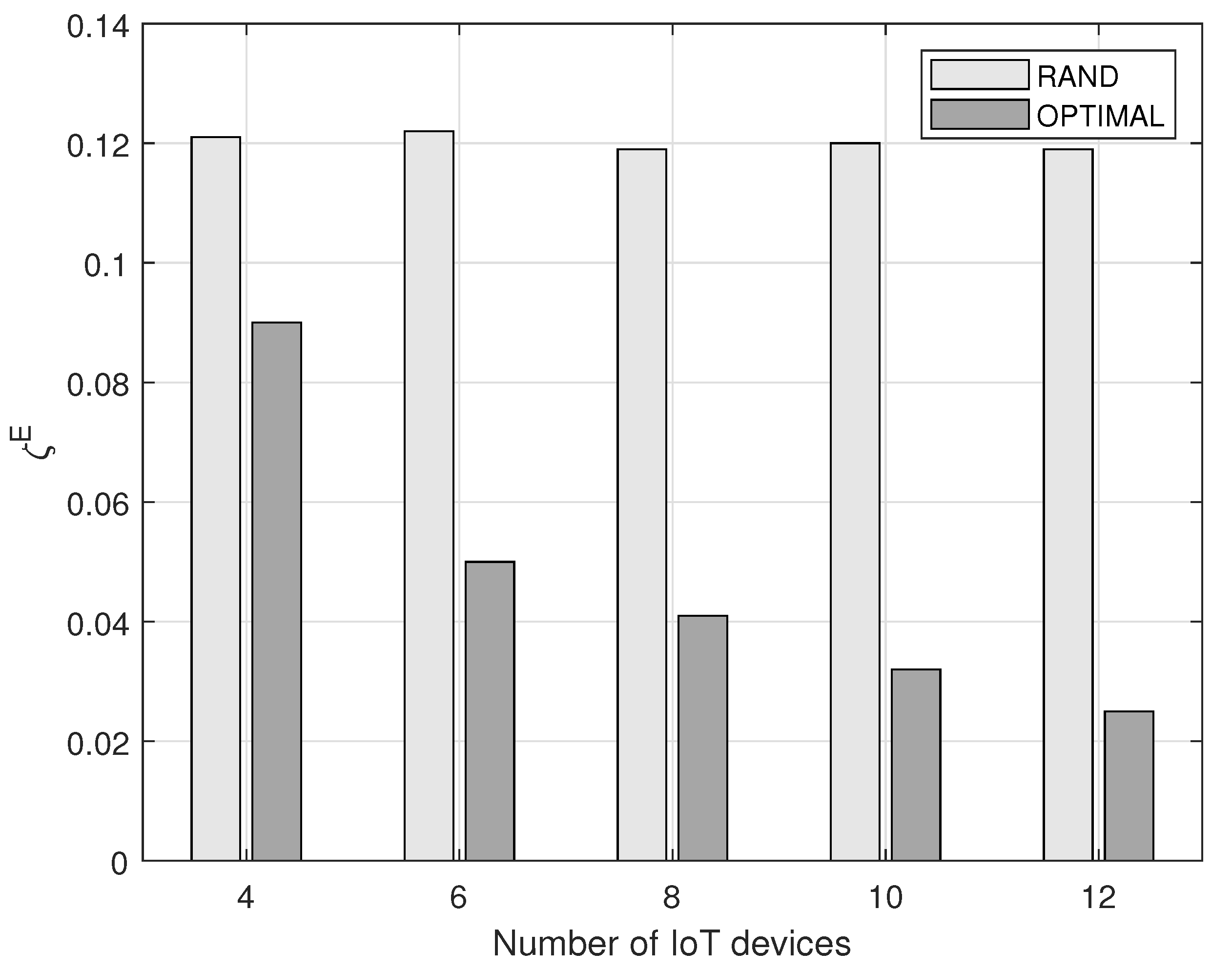
5.4. Comparison between the Optimal IoT Device Pairing and the Random Pairing
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Arslan, M.; Singh, I.; Singh, S.; Madhyastha, H.; Sundaresan, K.; Krishnamurthy, S. Computing While Charging: Building a Distributed Computing Infrastructure Using Smartphones. In Proceedings of the 2012 International Conference on Emerging Network Experiment and Technology (CoNEXT), Nice, France, 10–12 December 2012; pp. 193–204. [Google Scholar]
- Saleem, U.; Jangsher, S.; Qureshi, H.; Hassan, S. Joint Subcarrier and Power Allocation in Energy Harvesting-Aided D2D Communication Sign in or Purchase. IEEE Tran. Ind. Inf. 2018, 14, 2608–2617. [Google Scholar] [CrossRef]
- Huang, L.; Qian, L.; Bi, S.; Xia, Z. Adaptive Scheduling in Energy Harvesting Sensor Networks for Green Cities. IEEE Tran. Ind. Inf. 2018, 14, 1575–1584. [Google Scholar] [CrossRef]
- Bi, S.; Zeng, Y.; Zhang, R. Wireless Powered Communication Networks: An Overview. IEEE Wirel. Commun. 2016, 23, 10–18. [Google Scholar] [CrossRef]
- Pu, L.; Chen, X.; Xu, J.; Fu, X. D2D Fogging: An Energy-Efficient and Incentive-Aware Task Offloading Framework via Network-Assisted D2D Collaboration. IEEE J. Sel. Areas Commun. 2016, 34, 3887–3901. [Google Scholar] [CrossRef]
- He, Y.; Ren, J.; Yu, G.; Cai, Y. Joint Computation Offloading and Resource Allocation in D2D Enabled MEC Network. In Proceedings of the 2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Jin, S.; Zhu, Z.; Yang, Y.; Zhou, M.; Luo, X. Alternate Distributed Allocation of Time Reuse Patterns in Fog-enabled Cooperative D2D Networks. In Proceedings of the 2017 IEEE Fog World Congress (FWC), Santa Clara, CA, USA, 30 October–1 November 2017; pp. 1–6. [Google Scholar]
- Das, S.; Misra, S.; Wolfinger, B.; Obaidat, M. Temporal-Correlation-Aware Dynamic Self-Management of Wireless Sensor Networks. IEEE Trans. Ind. Inf. 2016, 12, 2127–2138. [Google Scholar] [CrossRef]
- Du, R.; Gkatzikis, L.; Fischione, C.; Xiao, M. On maximizing sensor network lifetime by energy- balancing. IEEE Trans. Control Netw. Syst. 2018, 5, 1206–1218. [Google Scholar] [CrossRef]
- Lin, C.; Deng, D.; Shu, L.; Wang, K.; Wang, S.; Tsai, I. On lifetime enhancement of dynamic wireless sensor networks with energy-harvesting sensors. In Proceedings of the 2016 EEE/CIC International Conference on Communications in China (ICCC), Paris, France, 27 June–1 July; pp. 1206–1218.
- Wang, K.; Shen, M.; Cho, J.; Banerjee, A.; Merwe, J.; Webb, K. MobiScud: A Fast Moving Personal Cloud in the Mobile Network. In Proceedings of the 5th Workshop on All Things Cellular: Operations, Applications and Challenges, London, UK, 17–21 August 2015; pp. 19–24. [Google Scholar]
- Tong, L.; Li, Y.; Gao, W. A Hierarchical Edge Cloud Architecture for Mobile Computing. In Proceedings of the 2016 IEEE International Conference on Computer Communications (ICC), San Francisco, CA, USA, 10–15 April 2016; pp. 1–9. [Google Scholar]
- Taleb, T.; Ksentini, A. Follow Me Cloud: Interworking Federated Clouds and Distributed Mobile Networks. IEEE Netw. 2013, 27, 12–19. [Google Scholar] [CrossRef]
- Liu, J.; Zhao, T.; Zhou, S.; Cheng, Y.; Niu, Z. CONCERT: A Cloud-Based Architecture for Next-Generation Cellular Systems. IEEE Wirel. Commun. 2014, 21, 14–22. [Google Scholar]
- Puente, M.; Becvar, Z.; Rohlik, M.; Lobillo, F.; Strinati, E. A Seamless Integration of Computationally-Enhanced Base Stations into Mobile Networks towards 5G. In Proceedings of the 2015 IEEE 81st Vehicular Technology Conference (VTC Spring), Glasgow, Scotland, 11–14 May 2015; pp. 1–5. [Google Scholar]
- Shukla, R.; Munir, A. An Efficient Computation Offloading Architecture for the Internet of Things (IoT) Devices. In Proceedings of the The 14th Annual IEEE Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2017; pp. 728–731. [Google Scholar]
- Ko, H.; Lee, J.; Pack, S. Spatial and Temporal Computation Offloading Decision Algorithm in Edge Cloud-Enabled Heterogeneous Networks. IEEE Access 2018, 6, 18920–18932. [Google Scholar] [CrossRef]
- Zhao, T.; Zhou, S.; Guo, X.; Niu, Z. Tasks Scheduling and Resource Allocation in Heterogeneous Cloud for Delay-Bounded Mobile Edge Computing. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–7. [Google Scholar]
- Tang, L.; Chen, X. An Efficient Social-Aware Computation Offloading Algorithm in Cloudlet System. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Chen, X.; Jiao, L.; Li, W.; Fu, X. Efficient Multi-User Computation Offloading for Mobile-Edge Cloud Computing. IEEE/ACM Trans. Netw. 2016, 24, 2795–2808. [Google Scholar] [CrossRef]
- Zheng, J.; Cai, Y.; Wu, Y.; Shen, X. Dynamic Computation Offloading for Mobile Cloud Computing: A Stochastic Game-Theoretic Approach. IEEE Trans. Mob. Comput. 2019, 18, 771–786. [Google Scholar] [CrossRef]
- Yu, S.; Langar, R.; Fu, X.; Wang, L.; Han, Z. Computation Offloading With Data Caching Enhancement for Mobile Edge Computing. IEEE Trans. Veh. Technol. 2018, 67, 11098–11112. [Google Scholar] [CrossRef]
- Shang, Y. Resilient Multiscale Coordination Control against Adversarial Nodes. Energies 2018, 11, 1–17. [Google Scholar] [CrossRef]
- Zhang, W.; Wen, Y.; Guan, K.; Kilper, D.; Luo, H.; Wu, D. Energy-Optimal Mobile Cloud Computing under Stochastic Wireless Channel. IEEE Trans. Wirel. Commun. 2013, 12, 4569–4581. [Google Scholar] [CrossRef]
- Samteladze, N.; Christensen, K. DELTA: Delta Encoding for Less Traffic for Apps. In Proceedings of the 37th Annual IEEE Conference on Local Computer Networks, Clearwater, FL, USA, 22–25 October 2012; pp. 212–215. [Google Scholar]
- Alsheikh, N.; Hoang, D.; Niyato, D.; Tan, H.; Lin, S. Markov Decision Processes with Applications in Wireless Sensor Networks: A Survey. IEEE Comm. Surv. Tutor. 2015, 17, 1239–1267. [Google Scholar] [CrossRef]
- Ko, H.; Pack, S. A Software-Defined Surveillance System with Energy Harvesting: Design and Performance Optimization. IEEE Internet Things J. 2018, 5, 1361–1369. [Google Scholar] [CrossRef]
- Puterman, M. Markov Decision Processes: Discrete Stochastic Dynamic Programming; John Wiley and Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Shang, Y. Vulnerability of networks: Fractional percolation on random graphs. Phys. Rev. E 2014, 89, 1–4. [Google Scholar] [CrossRef]
- Ko, H.; Lee, J.; Jang, S.; Kim, J.; Pack, S. Energy Efficient Cooperative Computation Algorithm in Energy Harvesting Internet of Things. Available online: https://hoy.kr/B2KEm (accessed on 10 October 2019).
- Guo, T.; Wang, N.; Tafazolli, R. Local Mobility Management for Networked Femtocells Based on X2 Traffic Forwarding. IEEE Trans. Veh. Technol. 2013, 62, 326–340. [Google Scholar] [CrossRef]
- Zheng, J.; Cai, Y.; Shen, X.; Zheng, Z.; Yang, W. Green Energy Optimization in Energy Harvesting Wireless Sensor Networks. IEEE Commun. Mag. 2015, 53, 150–157. [Google Scholar] [CrossRef]
- Fu, H.; Lin, P.; Lin, Y. Reducing Signaling Overhead for Femtocell/Macrocell Networks. IEEE Trans. Mob. Comput. 2013, 12, 1587–1597. [Google Scholar] [CrossRef]
- Ko, H.; Lee, J.; Pack, S. Performance Optimization of Delayed WiFi Offloading in Heterogeneous Networks. IEEE Trans. Veh. Technol. 2017, 66, 9436–9447. [Google Scholar] [CrossRef]
- Spielman, D.; Teng, S. Smoothed Analysis of Algorithms: Why the Simplex Algorithm Usually Takes Polynomial Time. IEEE J. ACM 2004, 51, 385–463. [Google Scholar] [CrossRef]
- Altman, E. Constrained Markov Decision Processes; Chapman & Hall: London, UK, 1999. [Google Scholar]
- Heyman, D.; Sobel, M. Stochastic Models in Operations Research: Stochastic Optimization; Courier Corporation: Chelmsford, MA, USA, 2003. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| State at the decision epoch t | |
| Action chosen at the decision epoch t | |
| Duration of each decision epoch | |
| Overall state space | |
| State for denoting the occurrence and processing status for the task of IoT device i | |
| State for denoting the occurrence and processing status for the task of IoT device j | |
| State for denoting the processing status for the offloaded task of IoT device i | |
| State for denoting the processing status for the offloaded task of IoT device j | |
| State for denoting the energy level of IoT device i | |
| State for denoting the energy level of IoT device j | |
| State for denoting whether the timer for the deadline of the task of IoT device i expires or not | |
| State for denoting whether the timer for the deadline of the task of IoT device j expires or not | |
| Action space | |
| Action space for IoT device i | |
| Action space for IoT device j | |
| Maximum battery capacity of IoT device | |
| Cost function on the energy outage | |
| Constraint function on the timer expiration of IoT device i | |
| Constraint function on the timer expiration of IoT device j | |
| Energy outage probability | |
| Timer expiration probability of IoT device i | |
| Timer expiration probability of IoT device j | |
| Upper limit on the timer expiration probability of IoT device i | |
| Upper limit on the timer expiration probability of IoT device j | |
| Individual energy outage probability of IoT device i when it is paired with IoT device j | |
| Decision variable to denote whether IoT device i is paired with IoT device j or not |
| 1 | [0.2 0.3] | [0.3 0.4] | [0.15 0.2] | [0.6 0.8] | [0.3 0.4] | [0.4 0.9] | [0.2 0.3] | 0.99 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ko, H.; Lee, J.; Jang, S.; Kim, J.; Pack, S. Energy Efficient Cooperative Computation Algorithm in Energy Harvesting Internet of Things. Energies 2019, 12, 4050. https://doi.org/10.3390/en12214050
Ko H, Lee J, Jang S, Kim J, Pack S. Energy Efficient Cooperative Computation Algorithm in Energy Harvesting Internet of Things. Energies. 2019; 12(21):4050. https://doi.org/10.3390/en12214050
Chicago/Turabian StyleKo, Haneul, Jaewook Lee, Seokwon Jang, Joonwoo Kim, and Sangheon Pack. 2019. "Energy Efficient Cooperative Computation Algorithm in Energy Harvesting Internet of Things" Energies 12, no. 21: 4050. https://doi.org/10.3390/en12214050
APA StyleKo, H., Lee, J., Jang, S., Kim, J., & Pack, S. (2019). Energy Efficient Cooperative Computation Algorithm in Energy Harvesting Internet of Things. Energies, 12(21), 4050. https://doi.org/10.3390/en12214050