1. Introduction
Recently, the modular multilevel converter based high-voltage direct current (MMC-HVDC) system has drawn significant attention from both the industry and academia. As a new breed of voltage-sourced converter (VSC), MMC outperformed the Line Commutated Converter (LCC) thanks to the decoupled control of active and reactive powers, the low harmonic voltages, the flexible scalability and the elimination of commutation failure [
1,
2,
3,
4]. MMC-HVDC has been widely used in transmission and distribution applications, such as wind farm connection, multi-terminal operation, and passive network power supply [
5,
6,
7].
In the planning stage, one of the most important characteristics for the connected AC system is the short circuit ratio (SCR). For the LCC-HVDC, detailed research has been carried out by CIGRE and IEEE in which the AC system strength is categorized by the SCR [
8,
9]. The AC systems with SCR less than two are defined as very low SCR systems because the connected LCC cannot operate in a consistently stable manner [
8]. For MMC-HVDC, there is no commonly accepted quantitation standard for describing the strength of the connected AC system, and there are no commonly accepted answers to the following two questions: (1) What are the minimum SCR requirements for the rectifier and the inverter MMC-HVDC station to transmit rated active power, respectively? and (2) Does the minimum SCR requirement vary with different control schemes?
As pointed out in [
10], the steady-state power flow constraint, the small-signal stability constraint and the transient stability constraint should be all satisfied if MMC-HVDC (VSC-HVDC) could operate stably. To determine the minimum SCR under the third constraint, a time-domain simulation of certain faults is the conventional method, given the lack of a mature analytical method. Therefore, research on the minimum SCR is usually based on the former two constraints.
By using a Thevenin voltage source, the maximum available power (MAP) of VSC is plotted, and determines how the MAP is influenced by the SCR of the connected AC system, the angle of AC system impedance, the limitation on the internal voltage of the converter, and the reactive power support [
11,
12]. In [
13], the minimum SCR for MMC-HVDC is calculated based on the steady-state power flow constraint. Because the dynamics of the converter is neglected, the results using the steady-state power flow constraint tend to be optimistic, and the results of [
11,
12,
13] are only the ideal theoretical minimum SCR requirements. Recently, the small-signal stability analysis has drawn great attention in academia, with which a stricter minimum SCR requirement could be calculated. An eighth-order small-signal model of a VSC connected to weak AC system is derived in [
14]; the results illustrate that the dynamics of PLL and the AC filter are crucial components for system stability. On the basis of the small-signal model, the influence of SCR and the phase-locked loop (PLL) on VSC was studied, and the connected AC systems with a SCR lower than 1.3 are defined as weak systems [
15]. By studying the stability difference between MMC and VSC, the maximum power transmission capability of MMC could approach VSC by adjusting the PI parameters of PLL [
16]. The small-signal stability of MMC is analyzed under the rectifier and the inverter mode, and the calculated minimum SCR of rectifier/inverter is 1.28–1.72/2.84–3.04 [
17]. The explicit mathematical expression for the VSC system eigenvalues is derived based on reduced order model in [
18], and result shows that the small signal stability of the system is significantly affected by the AC system strength (SCR) and PLL parameters. It is pointed out in [
19] that the connected AC system could be considered weak if its SCR is less than 2.0 for VSCs with the classic vector current control scheme, while the virtual synchronous generator control scheme is especially suitable for weak system connections.
Generally speaking, existed small-signal stability analysis based method has the space for improvement considering the following three aspects: First, detailed high-order, small-signal model of MMCs with internal dynamics were usually adopted [
20], which are not suitable for system-level planning studies. The high-order, small-signal model necessitates substantial requirements for modeling and computation resources, and its applicability in the system planning stage is limited. Second, one-terminal MMC with ideal DC source was usually adopted for calculating the minimum SCR, regardless of the dc network and other converter stations. Third, existed work mainly focused on the influence on small signal stability by controller parameters under single control scheme, influence on small signal stability by different control schemes has not been considered.
To overcome the aforementioned shortness of the existed research, improvements of this paper are made according to the following three aspects: (1) Derive the small-signal model of MMC-HVDC based on the simplified model of MMC; the internal dynamics of the MMC such as the circulating current is ignored to achieve computational efficiency; (2) Analysis is carried out using a two-terminal MMC-HVDC; the DC side of an MMC is connected to another MMC through the DC line as opposed to an ideal DC voltage source; in comparison with the MMC with an ideal DC voltage source, the model in this paper is more realistic and provides more reasonable results; (3) Four different control schemes are analyzed and compared, which provides more comprehensive results than a single control scheme.
The outline of this paper is as follows:
Section 2 discusses the theory and introduces the simplified model of MMC for determine the minimum SCR requirement.
Section 3 discusses the deduction of a small-signal model for MMC-HVDC.
Section 4 describes the procedure of the proposed methodology. The case studies have been conducted on a 2-terminal MMC-HVDC system with four typical control schemes in
Section 5.
Section 6 is the concluding section.
2. Theory and Simplified Model of Modular Multilevel Converter (MMC)
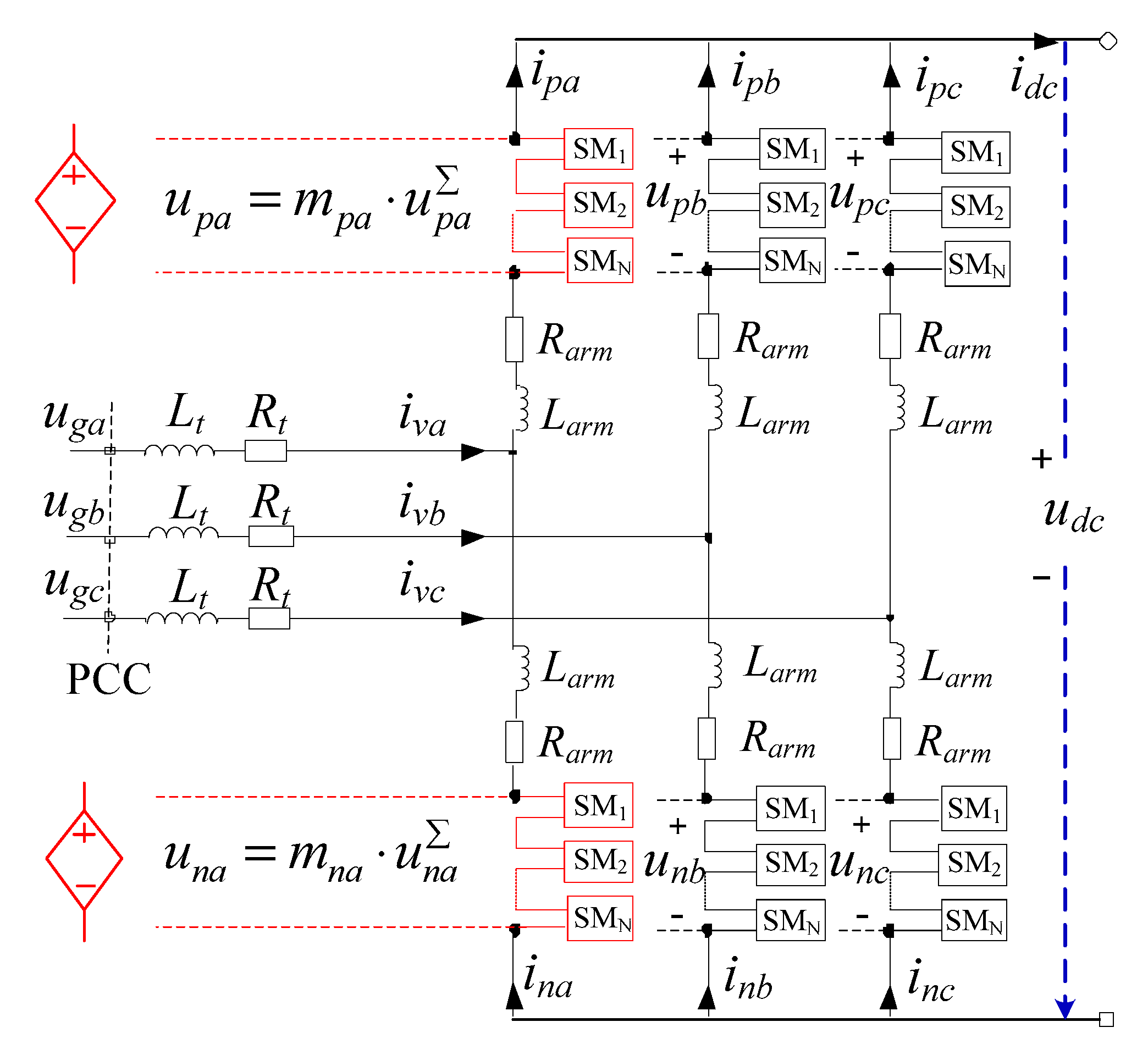
The structure of the MMC is illustrated in
Figure 1. The converter consists of six arms; the upper and lower arms in the same phase form a phase unit. Each arm consists of two parts, i.e.,
N series-connected identical sub-modules (SMs) and an arm inductor
Larm. The equivalent arm resistor, the equivalent transformer inductor and resistor are denoted as
Rarm,
Lt and
Rt, respectively. For simplicity, only half bridge SMs [
3] are considered in this paper.
As seen in
Figure 1,
urj and
irj are the arm voltage and the arm current, where
j (
j =
a,
b,
c) denotes phase and
r (
r =
p,
n) denotes the upper or lower arm.
mrj and
are the arm average switching function and the sum of arm SM capacitor voltage [
21].
ivj is the MMC AC output current in phase
j.
ugj is the AC voltage at the point of common coupling (PCC) in phase
j.
udc is the DC voltage, and
idc is the DC current.
According to Kirchhoff’s voltage law, the mathematical model in phase
j could be derived as follows:
Dividing the sum of (1) and (2) by 2, the AC side model of MMC could be derived as:
By subtracting (2) from (1), the DC side model of phase
j in MMC could be derived as:
A summation (4) of all three phases, and the DC side model of MMC could be concluded as follows:
Because each arm of the MMC consists of a large number of SMs, it is common practice to evaluate the average voltage and current quantities of all the SMs in one arm. Suppose the average arm SM capacitor voltage and the SM capacitor are denoted as
and
Csm, the dynamics of SM capacitor could be concluded as:
According to [
21], the arm average switching function could be denoted as in (7):
where
M,
ωg and
φj are the modulation index [
13], the fundamental angle frequency and the initial phase of arm average switching function.
Note that, in normal operation conditions
,
uCeq in (5) could be simplified as (8) by substituting (7) into it:
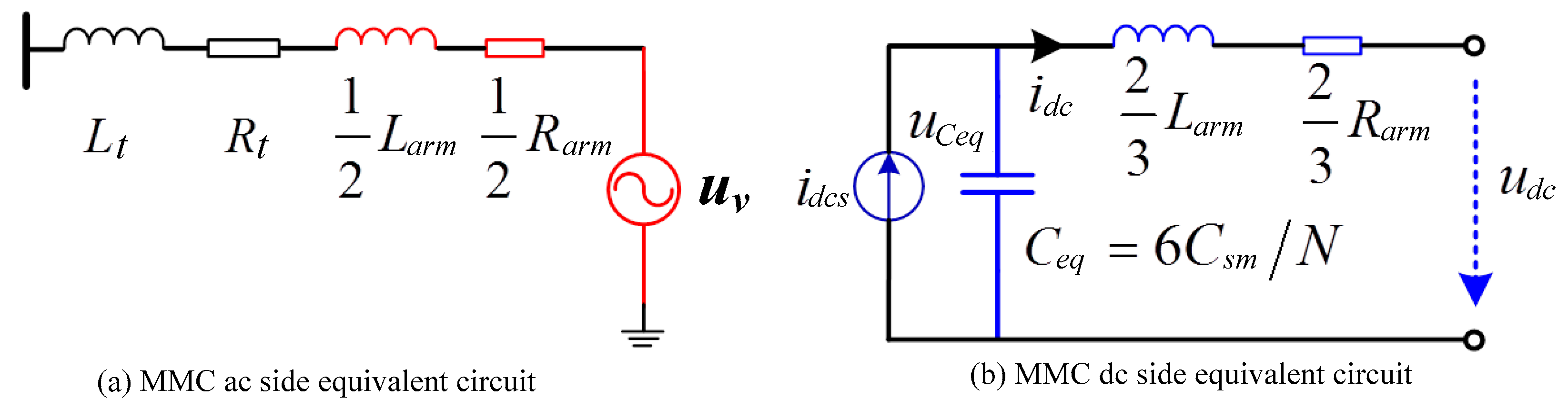
On the basis of (5), (6), and (8), the DC side model of MMC could be derived as in (9):
where
Ceq = 6
Csm/
N. Therefore, the AC and DC side model of MMC could be respectively described as in (3), (5), and (9). The equivalent circuit of MMC is plotted in
Figure 2, where
uv is the phasor of the three-phase voltage
uvj (
j =
a,
b,
c).
4. Procedure for Determining Minimum Short Circuit Radio (SCR) Based on Small-Signal Stability Analysis
4.1. Determining Steady-State Power Flow of MMC-HVDC
From the process of linearization in
Section 3, it is known that matrix
Asys is associated with the initial steady-state operation point. During planning stages, the operations of power systems under rated conditions are of prime concern. Therefore, the rated operation point of the MMC-HVDC system with active power and reactive power set as 1.0 pu and 0.0 pu is considered in this paper. According to the aforementioned analysis, the initial value of the state-variables
xsys could be calculated directly when the power flow of MMC-HVDC is determined. Therefore, the procedure for determining the power flow of MMC-HVDC is described in this section, which contains four steps:
Step 1. Calculate the steady-state power flow of the MMC subsystem that controls the active power with the Newton-Raphson method. The steady-state power flow of MMC subsystem satisfies (34), where subscript 0 means the steady-state initial values of each variable. For the MMC station that controls the active power, the known variables in (34) are
Pg0 (1.0 pu for rectifier and −1.0 pu for inverter),
Qg0 (0.0 pu),
Ug0 (1.0 pu), and
usy0 (0.0 pu). After solving (34),
θg0 equals arctan(
ugy0/
ugx0).
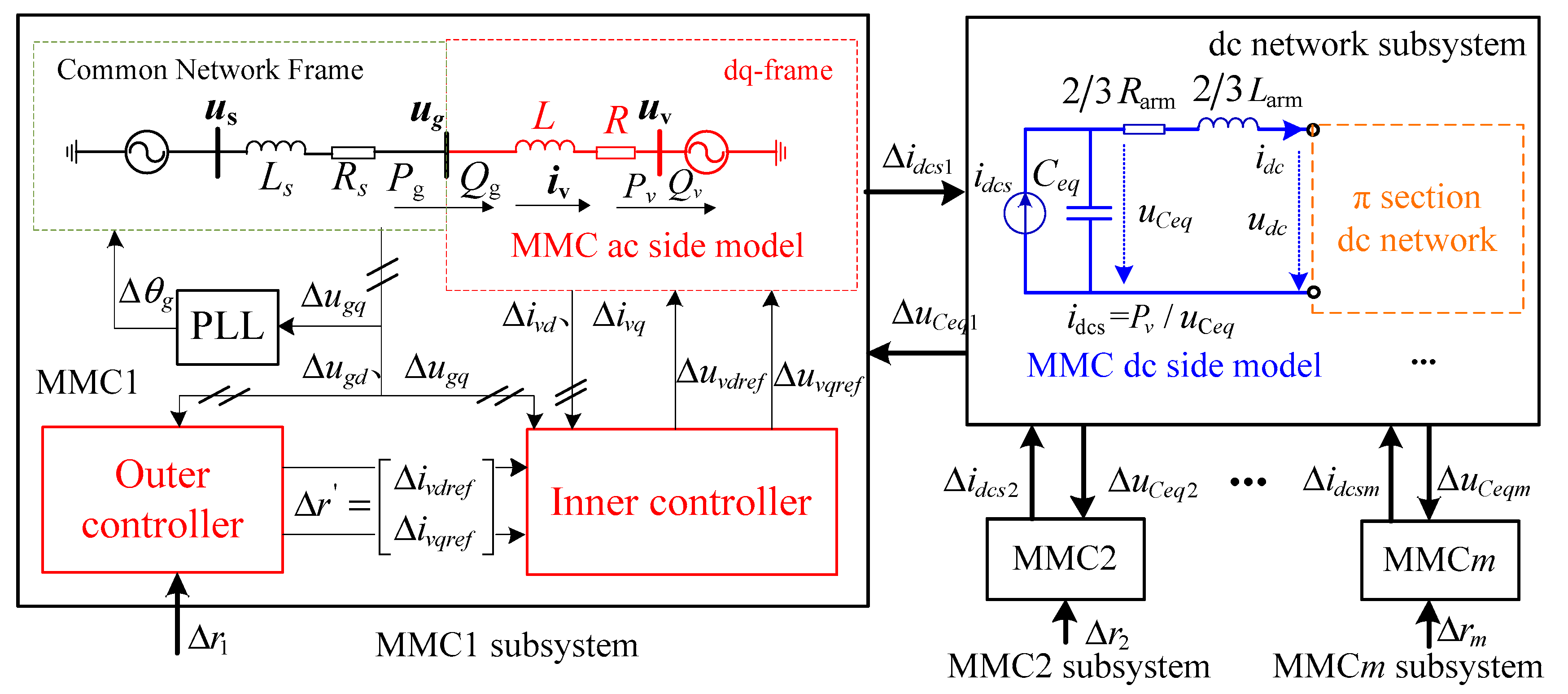
Step 2: Calculating the steady-state power flow of the DC net subsystem by setting the DC voltage as 1.0 pu for the MMC that controls the DC voltage and the DC power, supplied by current source
idcs as seen in
Figure 3, as
Pv0 for the MMC that controls the active power.
Step 3: Calculate the steady-state power flow of the MMC subsystem that controls the DC voltage described by (34) with the Newton–Raphson method. For the MMC station that controls the DC voltage, the known variables in (34) are Pv0 (already calculated in Step 2), Qg0 (0.0 pu), Ug0 (1.0 pu) and usy0 (0.0 pu). After solving (34), θg0 equals arctan(ugy0/ugx0).
Step 4: Transform the calculated results from the common network frame to the dq-frame with θg0 for concerned MMC subsystems.
In most studies that use small-signal analysis, the magnitude of
us were supposed as a constant (usually around 1.0 pu) to determine the initial values of the state variables. However, for AC systems with small SCR, there would be a great deviation between the calculated voltage and the rated voltage at the point of common coupling (PCC) with the above assumption, and it would eventually affect the rationality of the small-signal analysis results. In accordance with LCC-HVDC, the PCC voltage is set as its rated value [
25].
4.2. Procedure for Determining Minimum SCR
Procedures to determine the minimum SCR requirement of MMC-HVDC and a possible framework are described as follows:
Step 1. To calculate matrix Asys, the reference value rref, the parameters of PI controllers, and the SCR should first be specified. After selecting an initial SCR, repeat Steps 2–4.
Step 2. Calculate the MMC AC side power flow with the Newton–Raphson method. Then, calculate the initial values of the state-variables
xsys based on the calculated power flow results. Derive the linearized small-signal model of the whole MMC-HVDC as described in
Section 3, and determine the matrix
Asys.
Step 3. Calculate the eigenvalues of matrix Asys; the small-signal stability constraint is satisfied at the specified SCR if the real part of all the eigenvalues is negative. If the small-signal stability constraint is not satisfied, stop calculation and output the smallest SCR that satisfied the small-signal stability constraint.
Step 4. If small-signal stability constraint in Step 3 is satisfied, check whether the Thevenin equivalent voltage of the AC system us is within the safety limit. In this paper, us satisfies the voltage safety limit constraint, if the magnitude of us is between 0.9 pu and 1.2 pu If us satisfies the voltage safety limit constraint, decrease the SCR by increasing the AC system impedance and go back to Step 2. Otherwise, stop calculation and output the smallest SCR that satisfied the safety limit constraint.
The respectively flowchart of the proposed procedure is outlined in
Figure 7.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}