Wave Power Output Smoothing through the Use of a High-Speed Kinetic Buffer


Abstract
1. Introduction
- The development of control methods for power output regulation at hybrid wave energy installations combined with a flywheel is presented. The proposed control strategy can be used for wave power output regulation in order to satisfy future grid codes for marine energy sources.
- The proposed control considers the application of flywheel ESSs for wave energy plants to smooth the power output delivered to the grid.
- It is worth highlighting that the developed control strategies were applied using data from an existing wave emplacement, namely, the Lysekil Wave Energy Site located in Sweden.
2. Wave Energy Characteristics
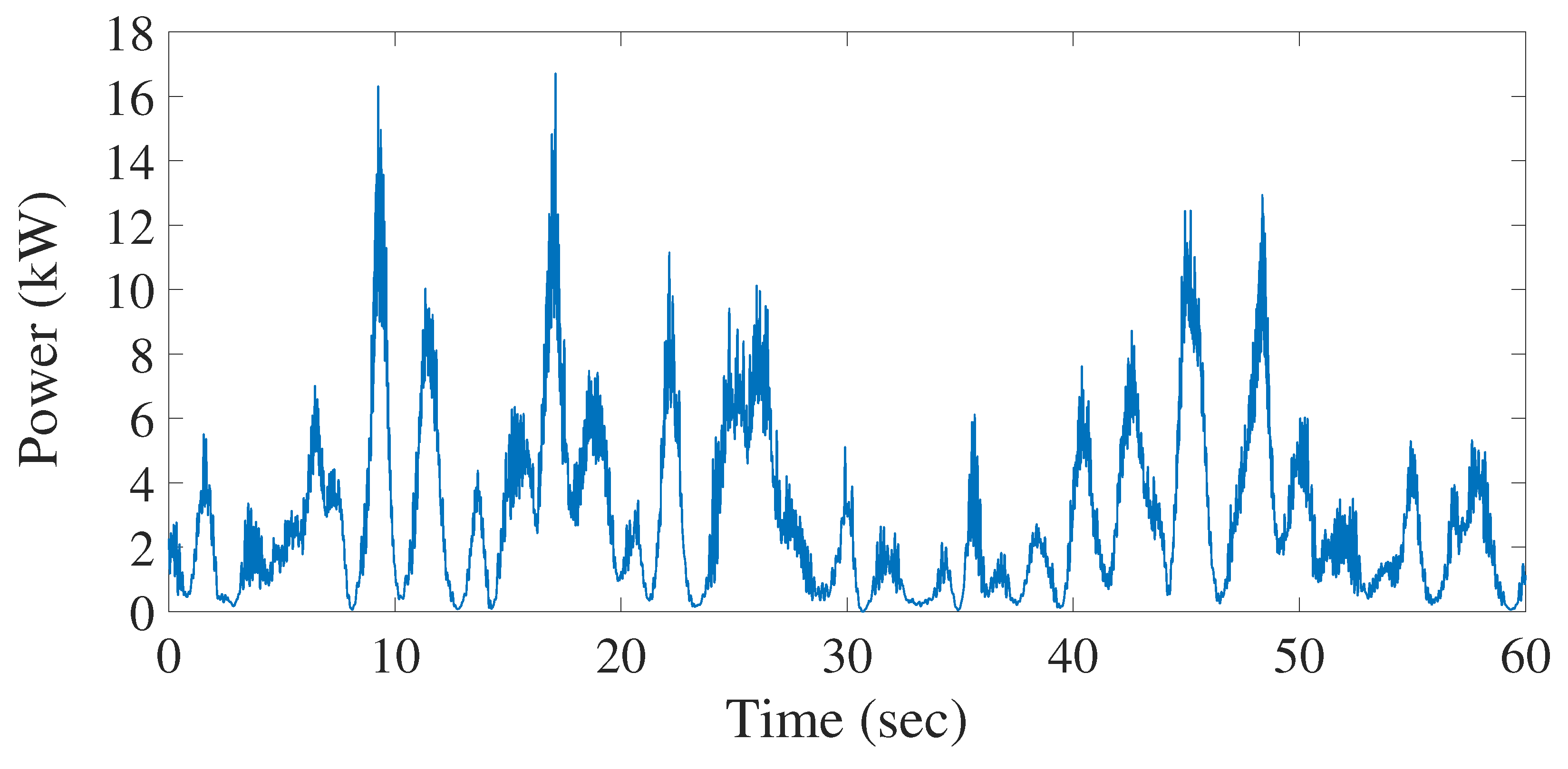
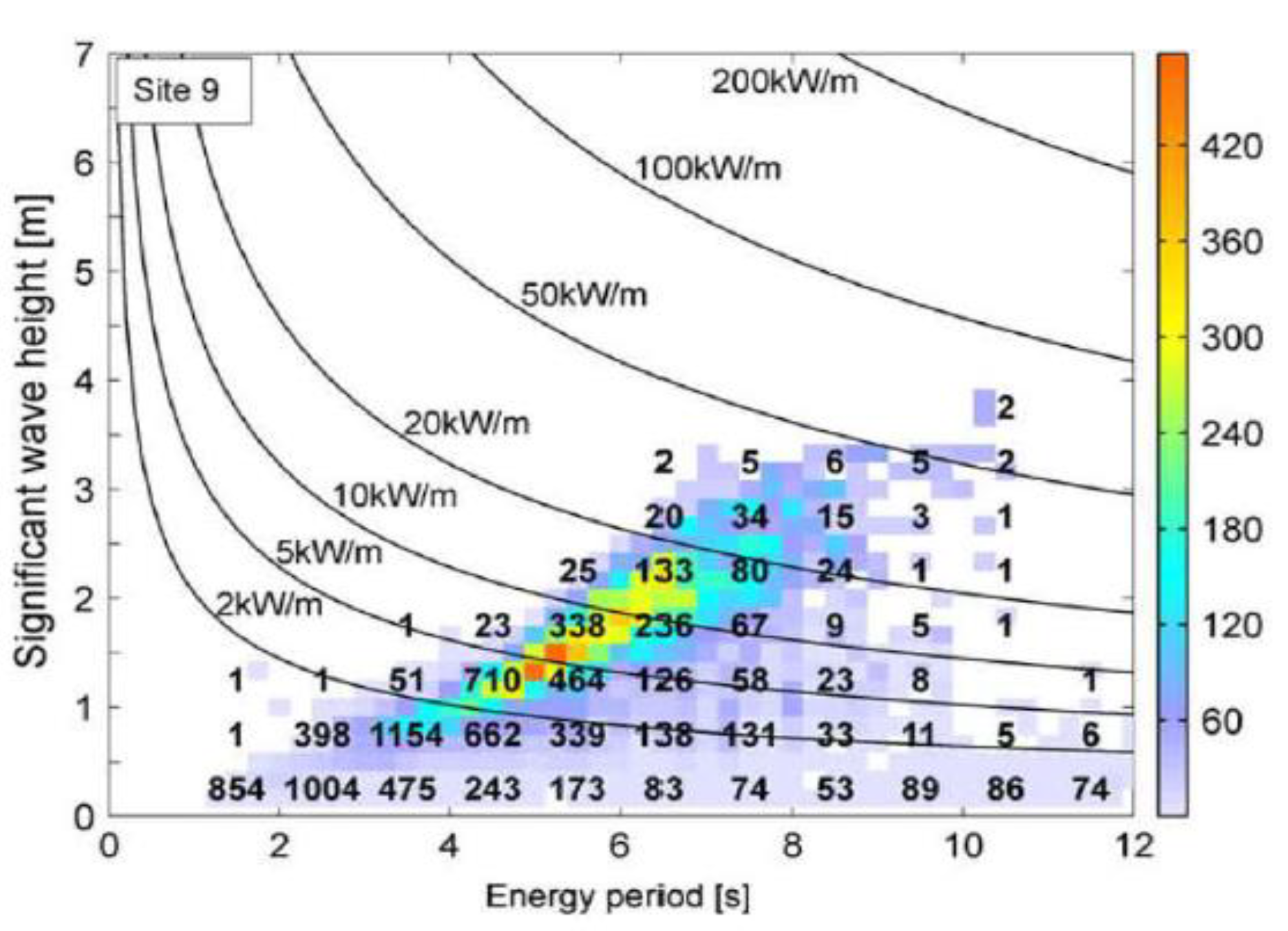
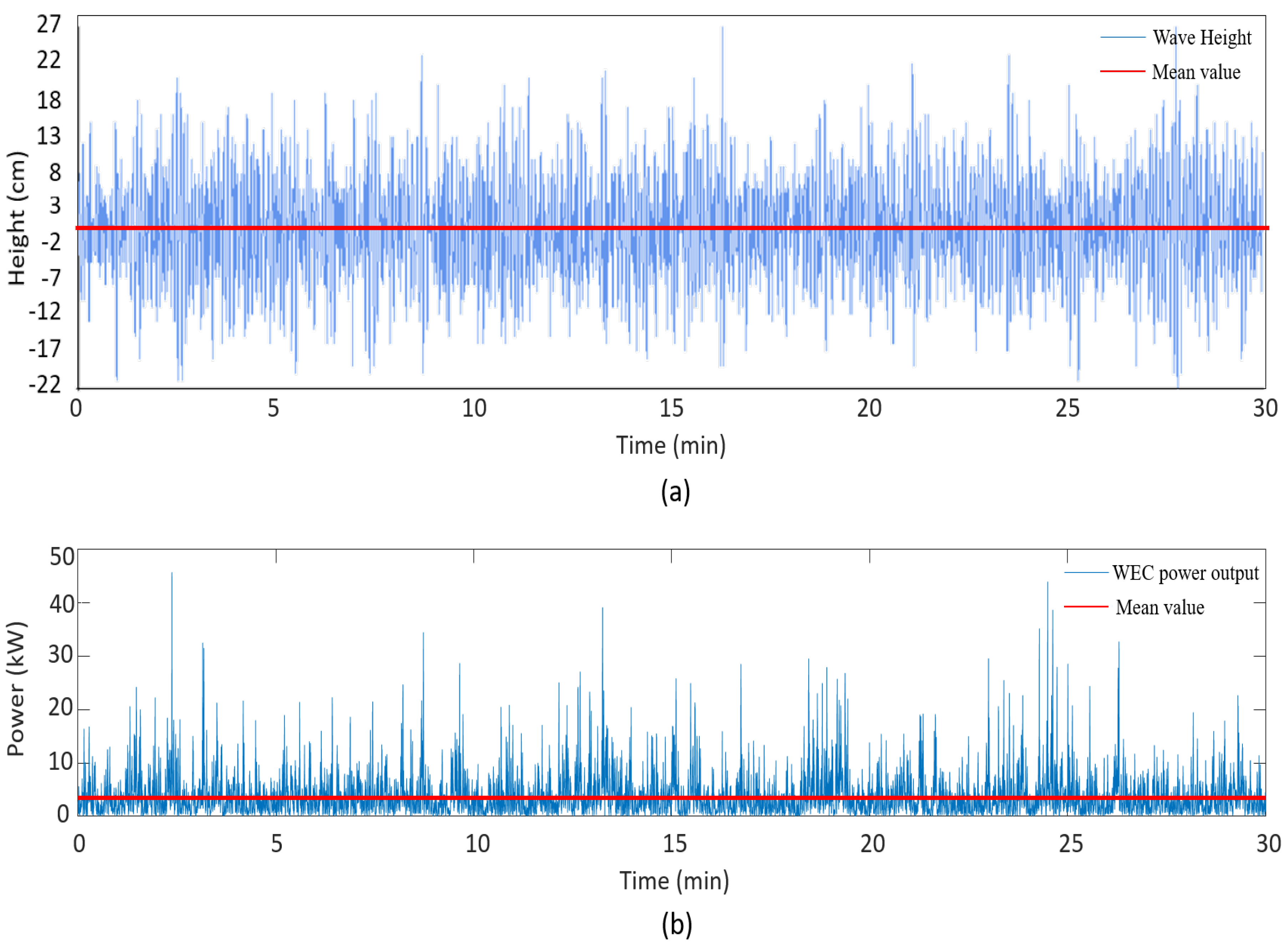
- Wave energy is characterized by the height and frequency of the waves, which experience constant variation; as a result, a marine installation’s power output does not comply with the quality criteria required for electric grids. To improve the power quality of the delivered energy, it is possible to install storage systems in marine emplacements or even group wave generators in a way that allows oscillations of the power output of some units to be compensated by the power output of other units in the same cluster.
- Wave direction is very changeable, and for this reason, it is necessary to carry out exhaustive studies to determine the optimal location of the marine generation units’ mooring systems.
- With respect to grid connection requirements, there are no grid codes regulating the coupling of marine generation emplacements; therefore, the codes that have been used for wind installations are applied instead. However, the variability in the power output that marine installations inject into the grid must be considered because their behavior differs greatly from other installations.
3. Wave Power Output Signal Improvement
- The first approximation consists of clustering a set of WECs at the same connection point (PCC) in order to generate power that can be injected into the grid with reduced oscillations. This power output aggregation also improves the on-shore connection system [22].
- Another option is the control of the wave power converter. The active control of the power take-off (PTO) system can improve the power output of a grid-connected marine emplacement [23].
- In those cases in which hydraulic PTOs are used, it is possible to reduce the power output oscillations by means of water accumulators at sea level [24]. The system utilized by overtopping reservoirs allows for a small power output regulation. Nevertheless, storing wave energy in its hydraulic form in other types of installations could lead to extra installation costs [25].
- Capacitors were used in [26], in which a power converter controlled the charge/discharge operation to smooth the power output oscillations of the marine installation. It was demonstrated that the size of the capacitor depends on the size of the installed WEC power. Consequently, its use is restricted to small wave energy plants.
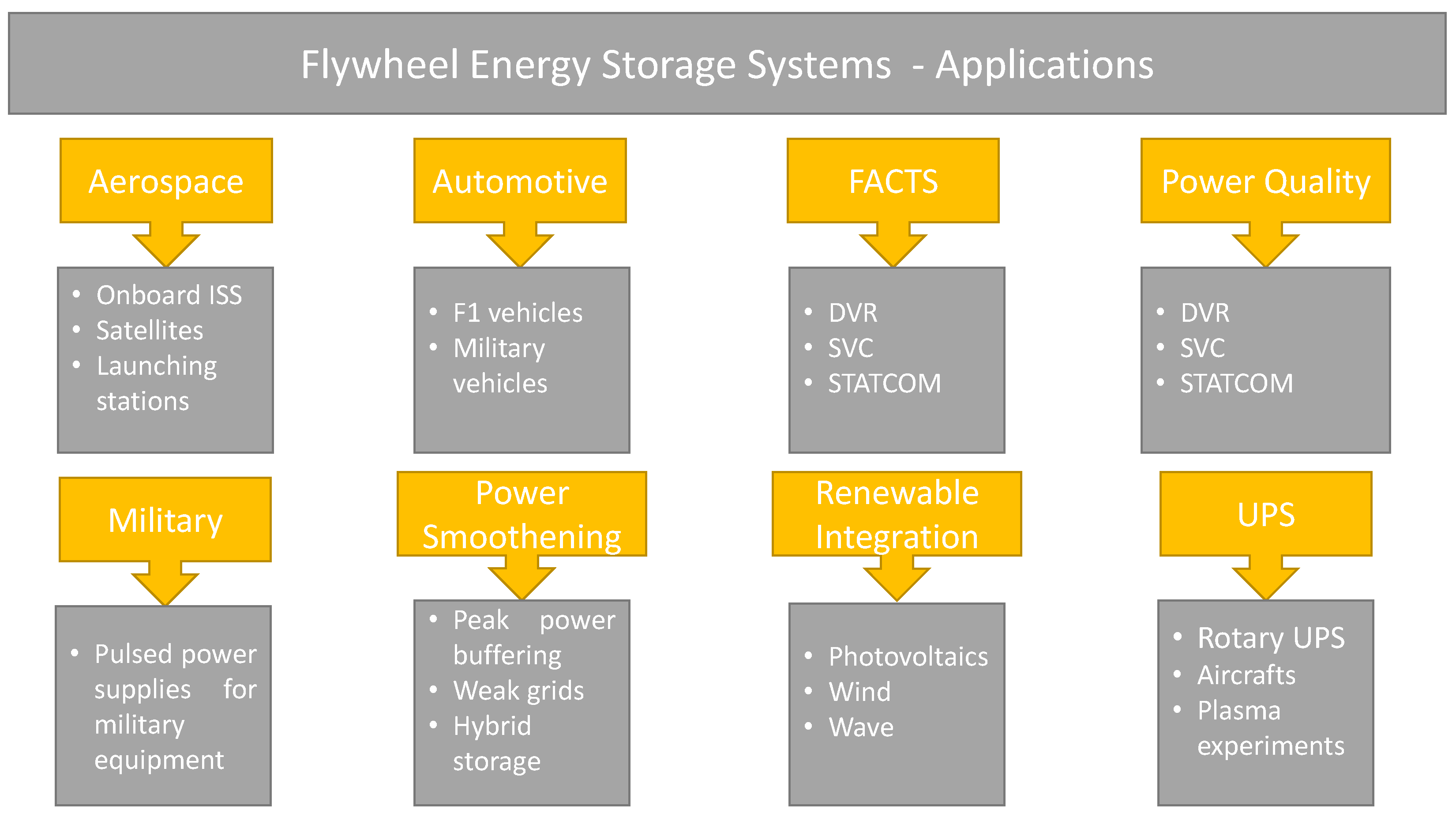
4. Flywheel Energy Storage Systems
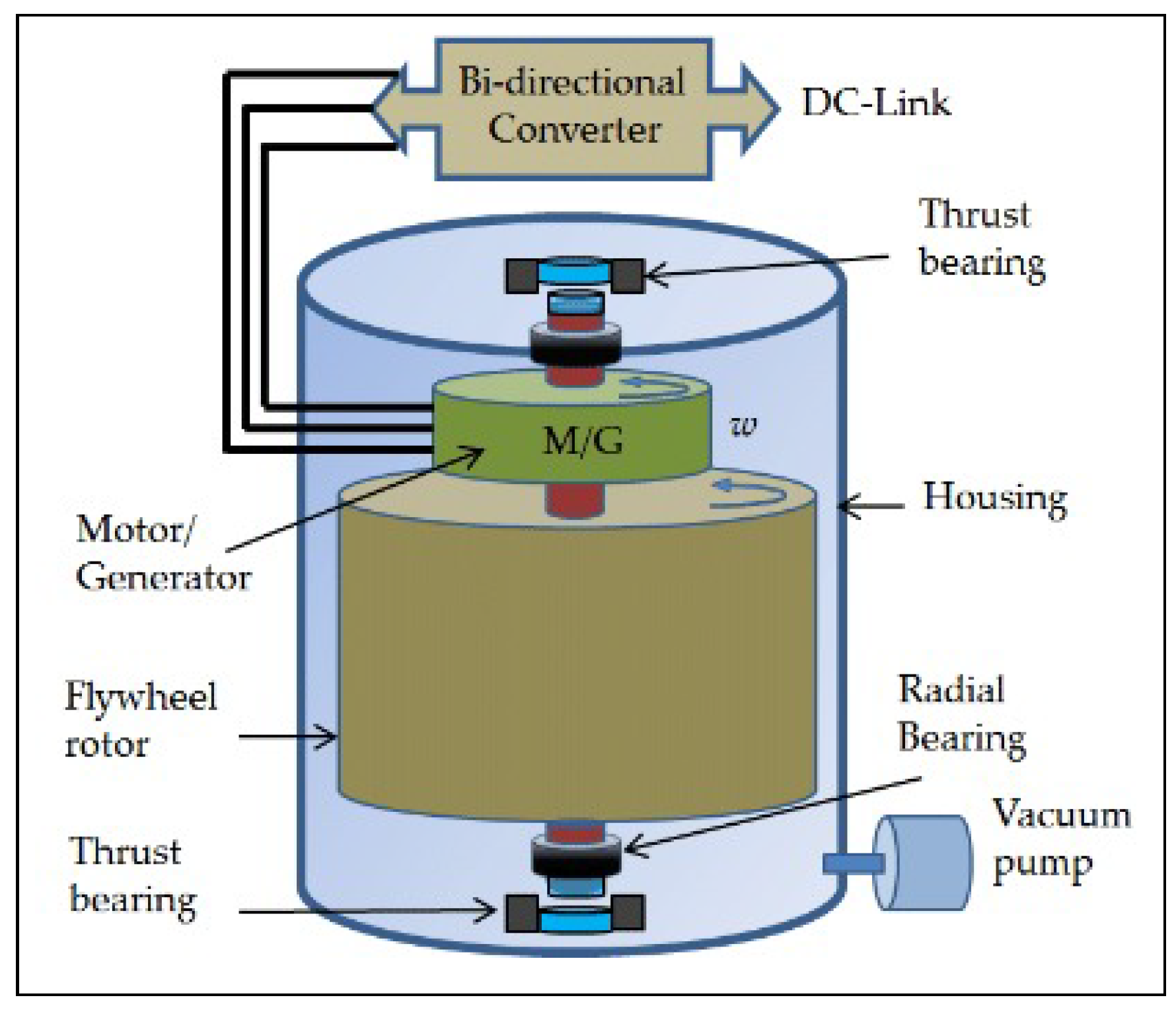
- The primary component is a rotating mass that is commonly known as a flywheel. The rotating mass is able to store kinetic energy, so the bigger the size of the flywheel, the greater the stored energy. The stored kinetic energy is strongly dependent on the mass rotational speed.
- An electrical machine is in charge of transforming the mechanical energy to electrical energy or vice versa (generator/motor).
- Power electronics are used for controlling the performance of the electrical machine.
- Magnetic bearings hold the flywheel’s weight.
- An external inductor is used for improving the Total Harmonic Distortion (THD) that is created by the generators of the permanent magnets in the electrical machine.
- Moreover, flywheels have a higher power and energy density [27].
- They also have a shorter charging time. This translates to a power output that can come from primary sources with high variability in a short period of time, such as wind and wave power [27].
- Flywheel ESSs are cheaper compared with other batteries storage systems, such as Li-ion and flow batteries [45], and because their performance does not degrade over time, they do not need to be replaced, contrary to the requirements of battery devices. In general, the economics of flywheel units is superior compared with battery technologies; for example, for one cycle per day, the battery cost of a Li-ion and flow battery can be up to 14.2% and 24% higher than the flywheel cost, respectively. This difference increases for three or more cycles per day, as shown in [45].
4.1. Flywheel Components
4.1.1. Flywheel Rotating-Mass
4.1.2. Magnetics Bearings
- Passives: The main advantages of these elements are their low friction losses and low cost [48]. However, they are used as backup bearings because their performance presents instabilities.
- Actives: These bearings are used as additional units to reduce rotor vibrations. Their main advantage is that they present higher controllability and longer life cycles than passive ones, but active magnetic bearings do present higher losses due to the existence of bias currents. Combining active and mechanical bearings is a good choice in terms of controllability, stability, viability, and costs [41].
- Lastly, superconducting magnetic bearings are the most widely utilized type in applications that require high speed since they have more stability, longer life cycles, and lower losses. The main inconvenience is their very low operating temperature, which requires the addition of a cryogenic system that can provide these low temperatures. Consequently, the cost of the equipment increases [41].
4.1.3. Electrical Machine
4.1.4. Power Converters
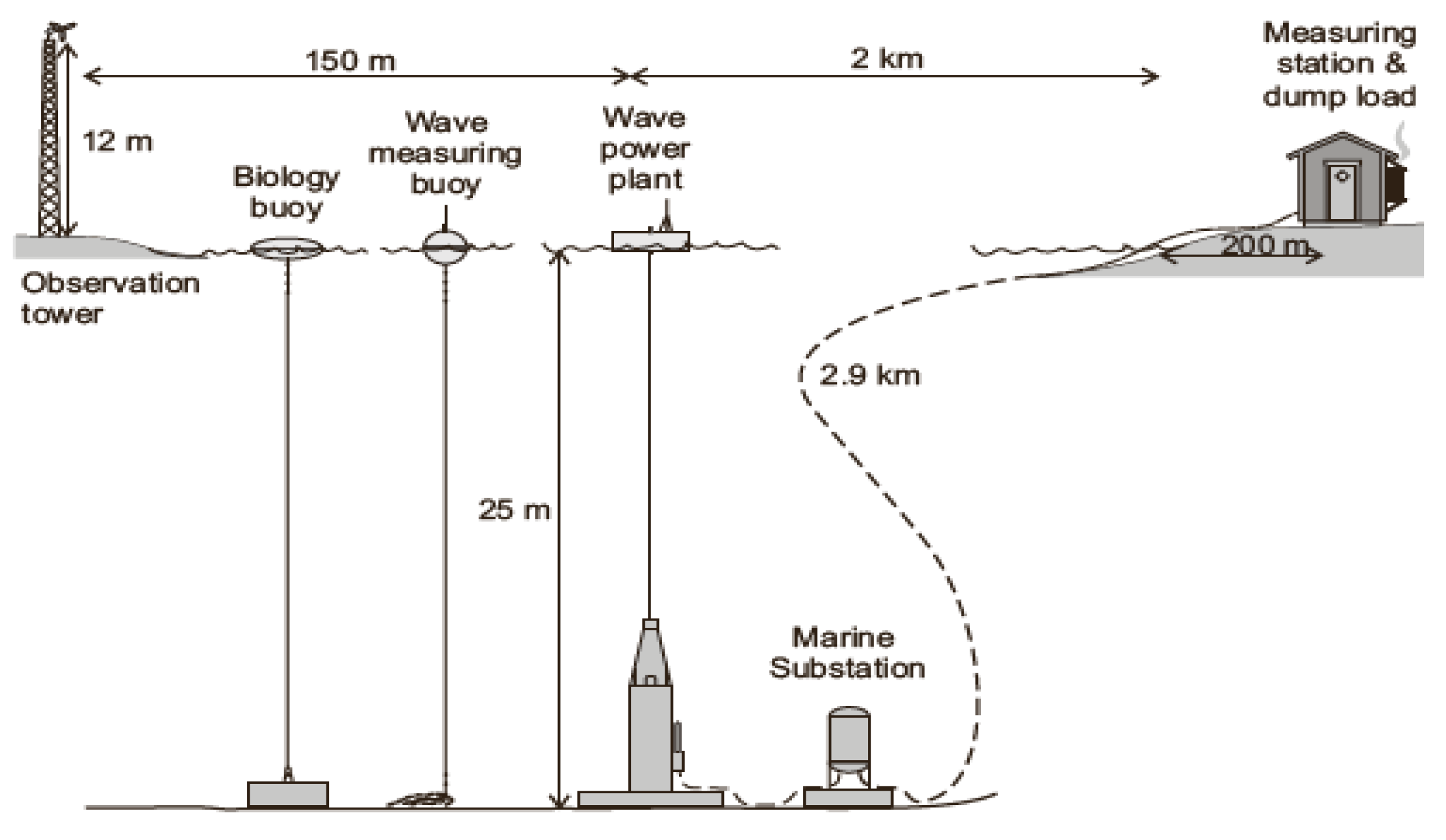
5. Lysekil Research Site
5.1. Location
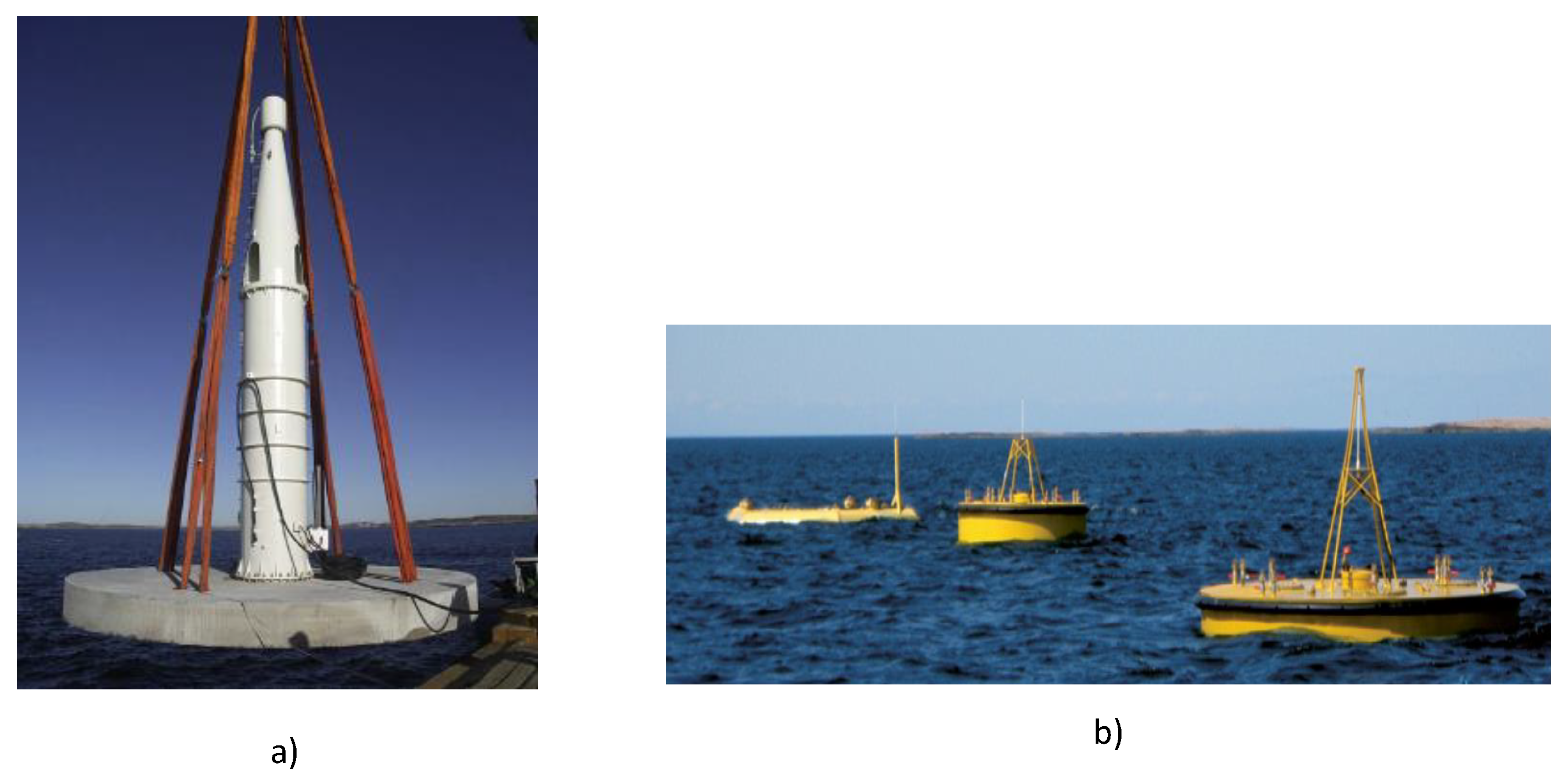
5.2. Technology Used
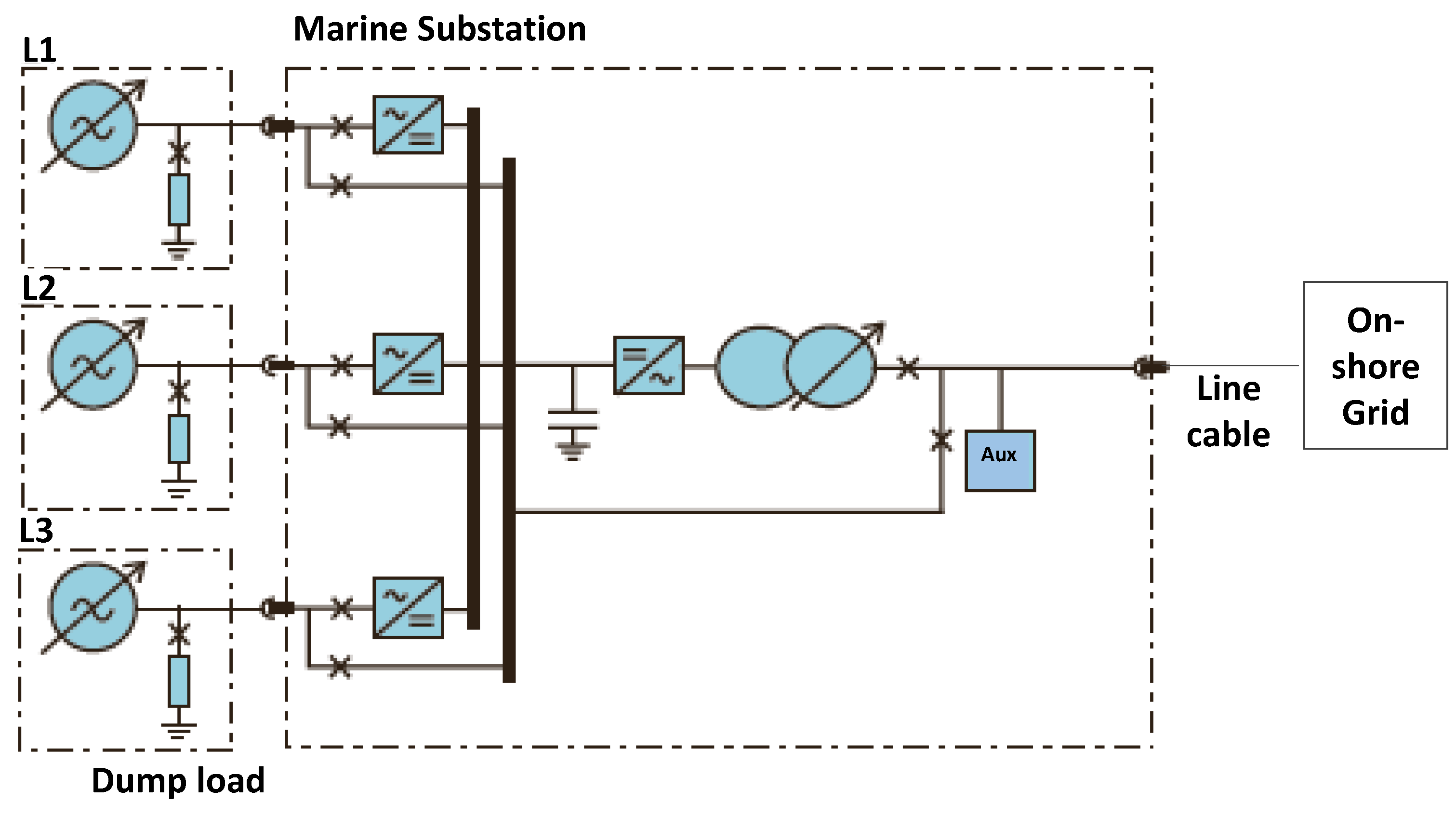
5.3. Marine Substation
6. Lysekil Research Site Modelling for Power Output Smoothen
6.1. LRS Input Data
6.2. LRS Modelling
6.2.1. General Description
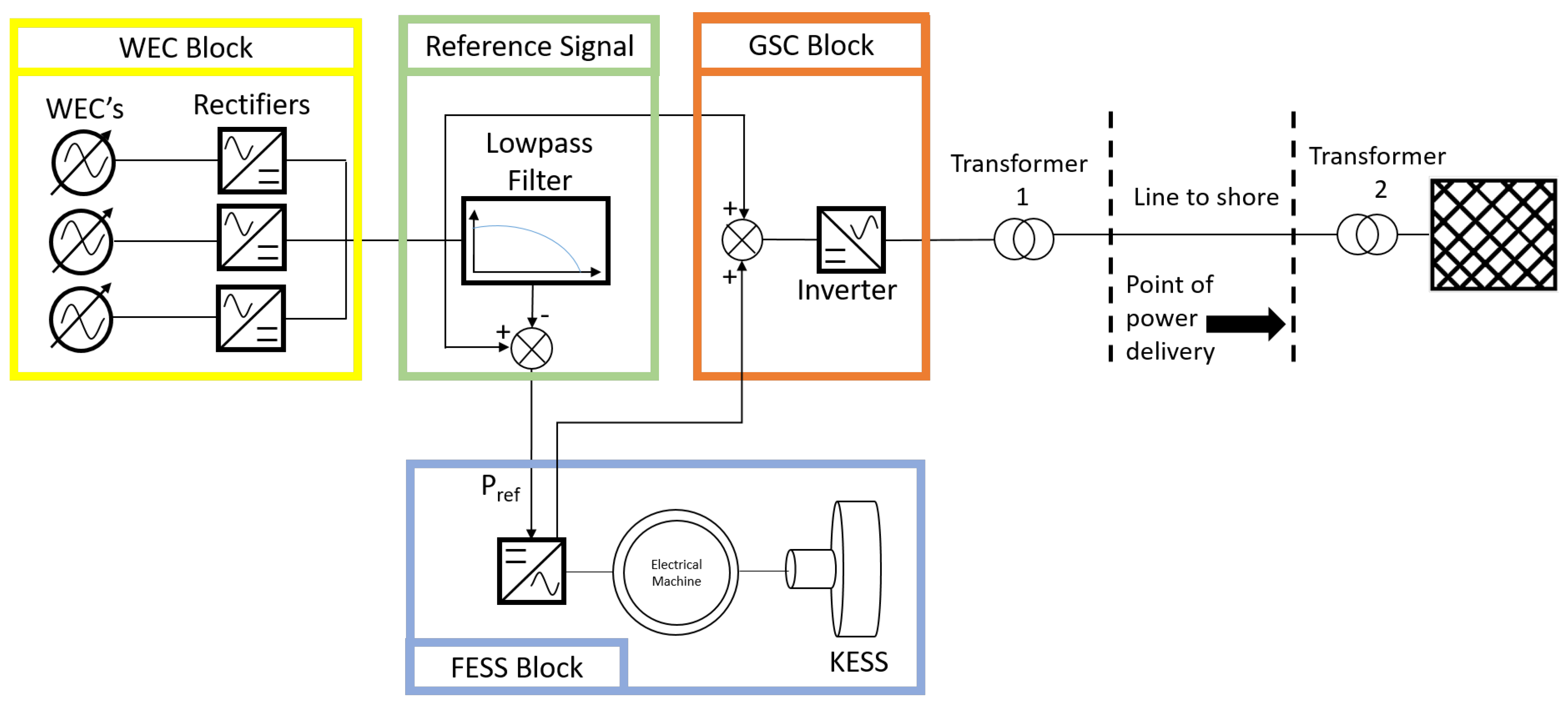
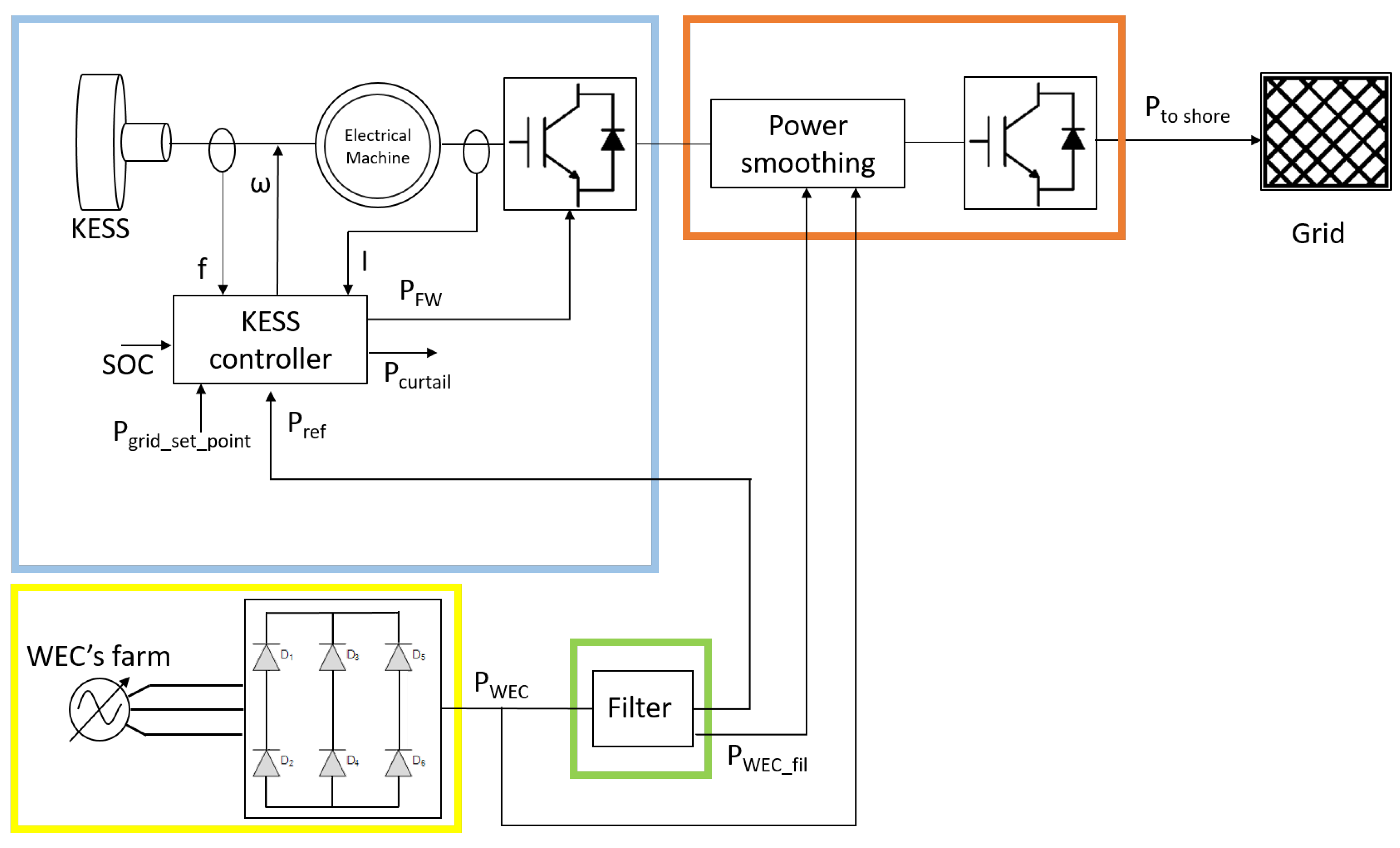
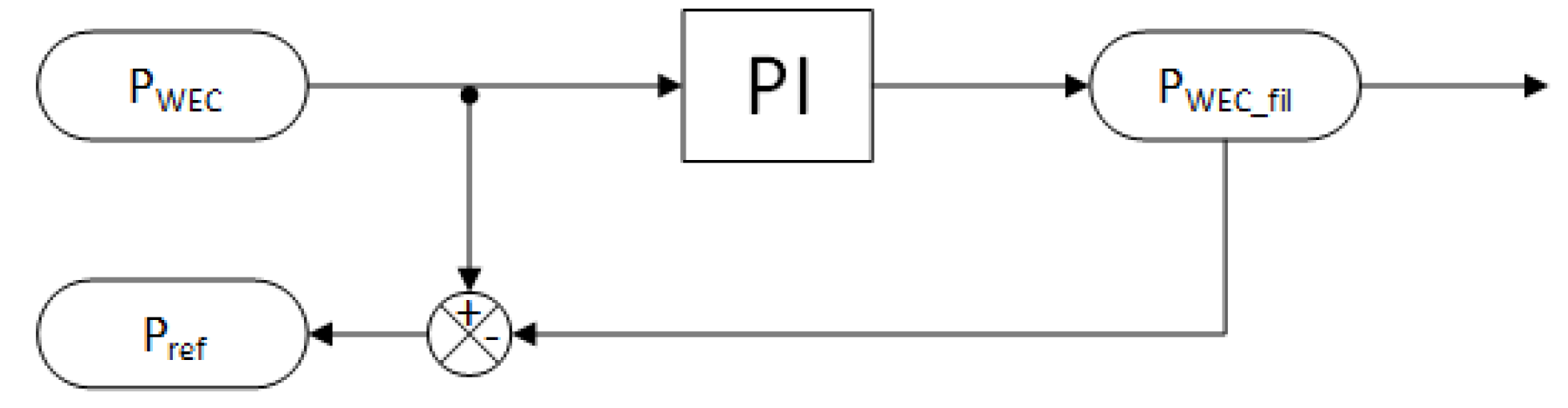
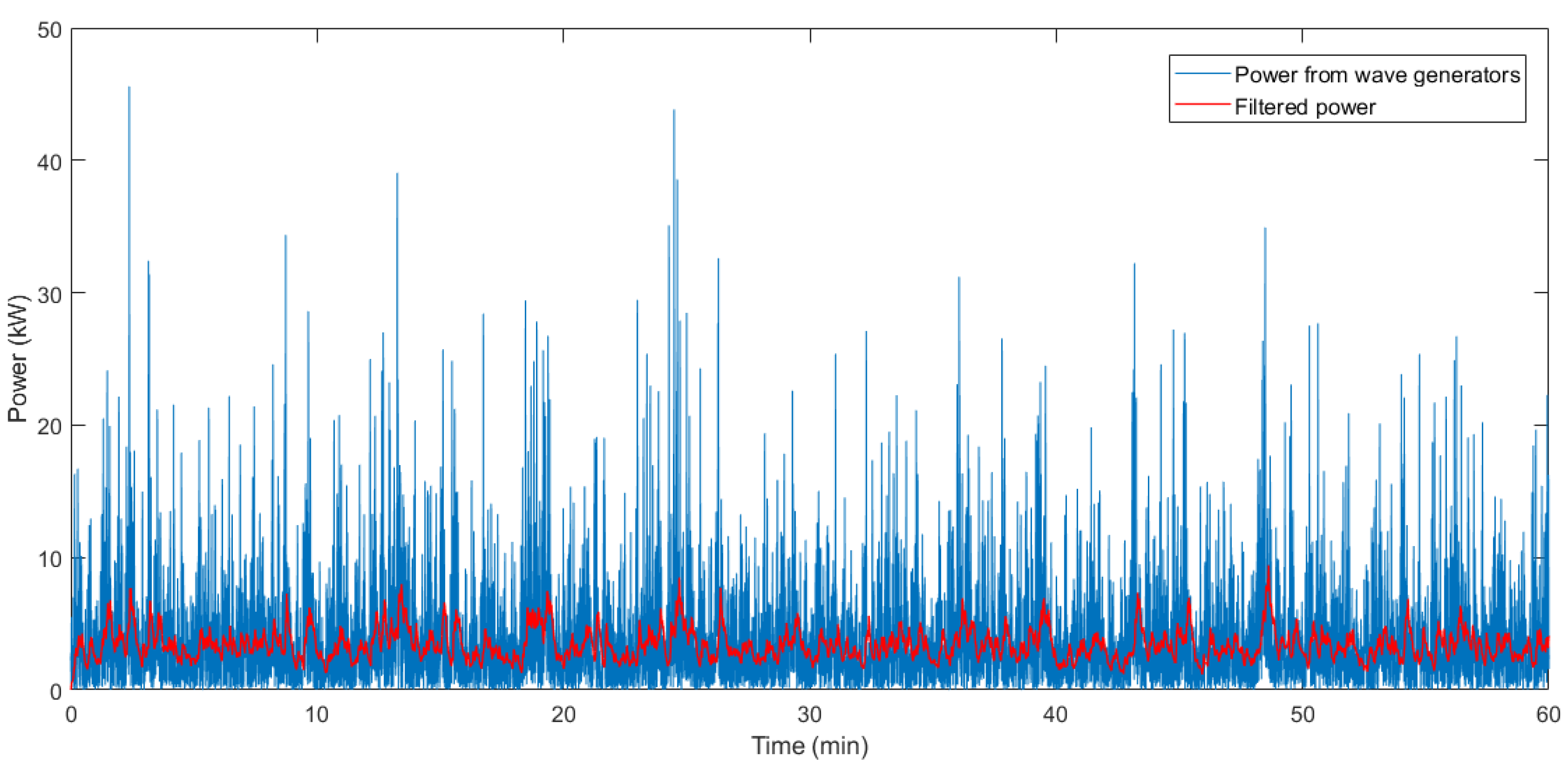
- Filter: the purpose of the filter is to create a reference signal for the FESS in order to store wave energy in this device. To accomplish that, the filter decomposes the input signal (power from WECs) into two components: one that corresponds to the smoothed power output and another that corresponds to the fluctuating part of the signal and that must be stored in the FESS (Figure 14, Reference signal Block).
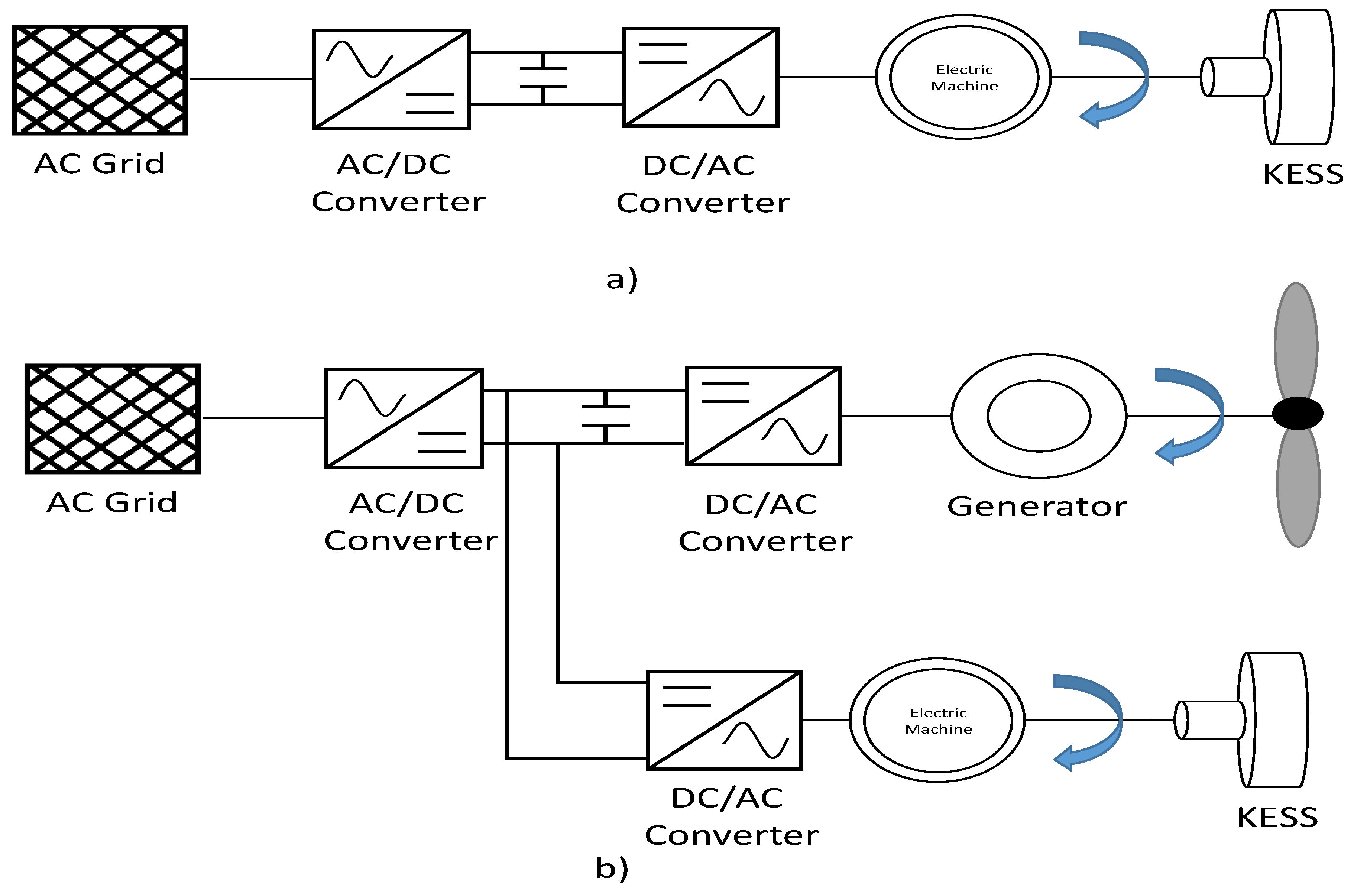
- The KESS is formed by a high-speed flywheel that is connected to the DC link (see Figure 14, FESS Block).
- The DC/AC inverter is an IGBT inverter that improves the wave farm power output by filling the power valleys with the energy stored in the KESS (see Figure 14, Grid-Side Converter Block).
- Marine transformers are used for integrating the wave power output to the on-shore power grid. The transmission network at the Lysekil emplacement consists of two power transformers with five winding taps connected at each extreme of a submarine transmission line. In this study, only the first transformer was considered [63].
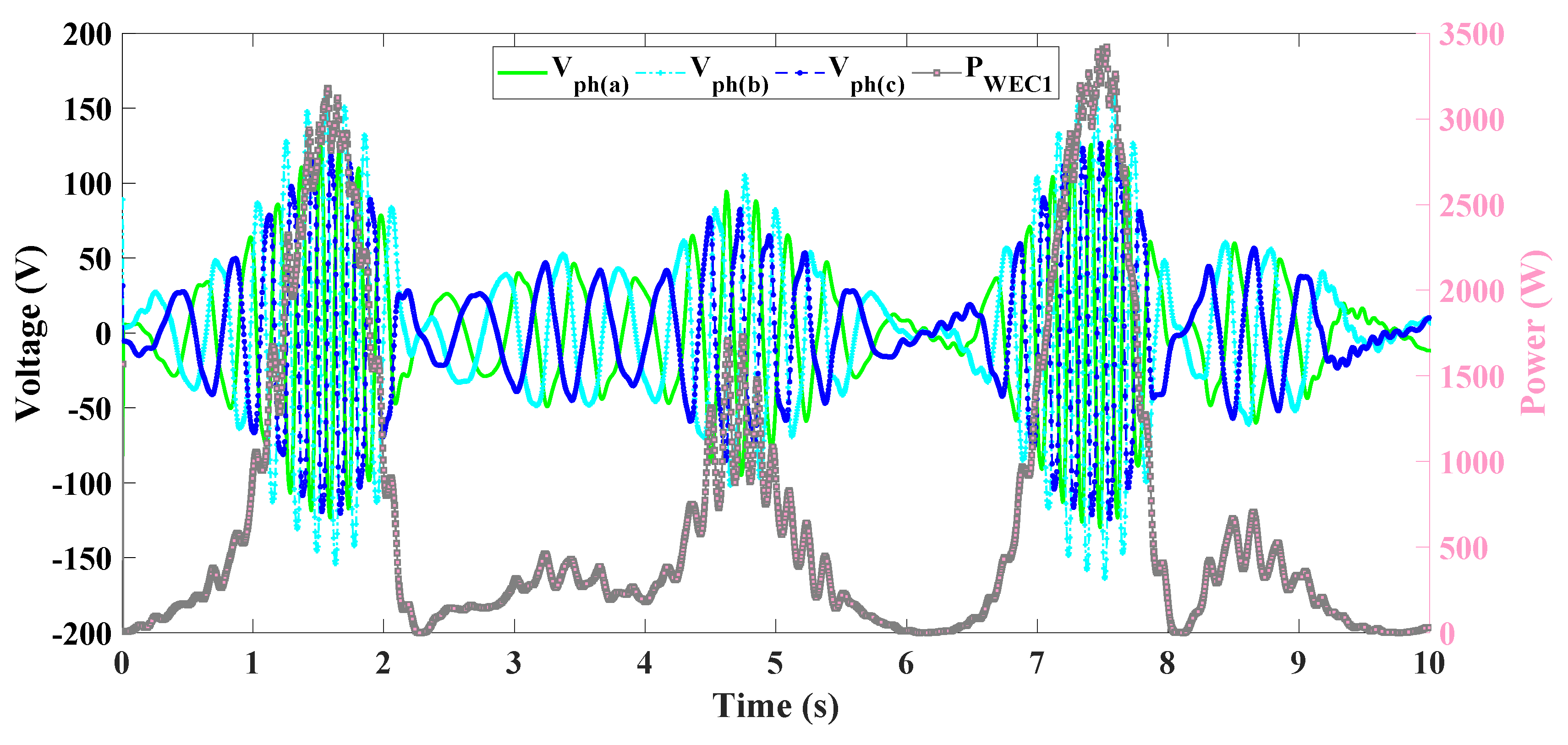
6.2.2. WEC Units
6.2.3. Flywheel Model
- Drag losses occur when the FESS model is operated between 15 and 30 krpm. In this speed range, the air in the flywheel chamber develops a turbulent velocity regime. Under this condition, the power that dissipates because of the drag losses from a rotating cylinder in a concentrically cylindrical case can be expressed as (6) [67]:where R is the cylinder radius, and is the frictional force on the cylinder. The force induced by the viscous drag is expressed as (7):where is the friction factor or drag coefficient obtained experimentally at low speed [64], is the air density [64], and L is the cylinder length.
- For electrical machine losses in the FESS model, an electrical machine whose stator is coreless is considered; thus, the main source of losses in the machine is Joule losses, as expressed in (8):
- Lastly, the magnetic bearing losses associated with the magnetic bearing that is responsible for sustaining the flywheel rotor can be classified as hysteresis losses or eddy losses. At high flywheel speeds, the eddy losses are those that surpass the hysteresis losses [64]; thus, for the developed FESS model, magnetic bearing losses are calculated according to (9), and these losses are directly proportional to the square of the flywheel rotational speed.where is a constant that depends on both the geometry and the material used in the magnetic bearing’s design, is the maximum magnetic flux, and f is the flywheel frequency.
6.2.4. Grid Connection
7. LRS Power Output Smoothening
7.1. First Stage: Generators Clustering
- Peak Power, Average Power, and Peak/Average Ratio.As the number of generators clustered at the grid connection point increases, both the peak and average power values of the power output from the wave energy plant increase, leading to a simultaneous decrease in the peak/average power ratio.
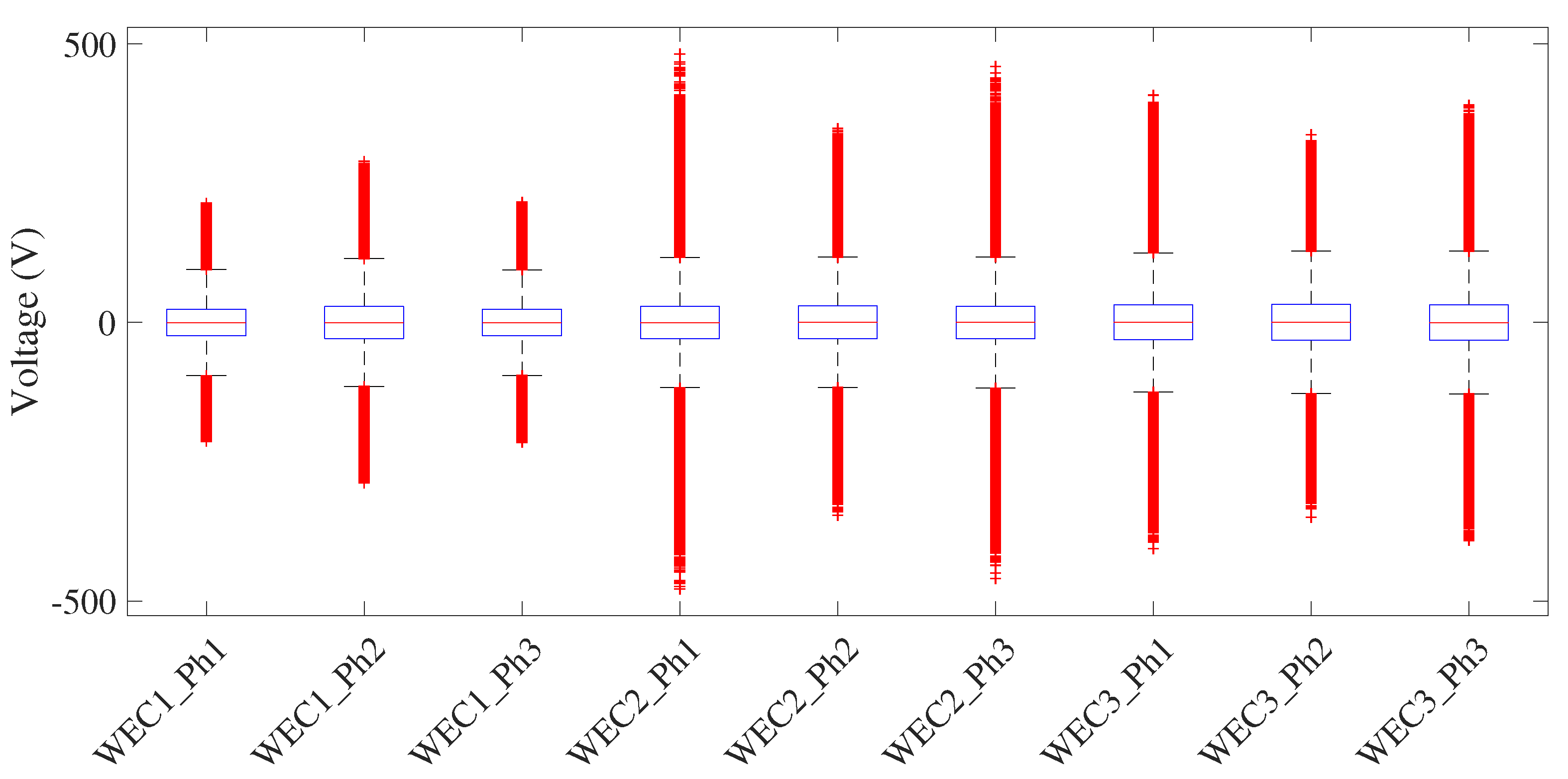
- Normalized Standard Deviation (nSD).The normalized standard deviation is measured in p.u. and gives a measure of the relative power output fluctuations. This value is more intuitive than the value of absolute fluctuations.
- Point of delivery KPIs.Table 1 shows the power delivered to the grid by the wave energy farm at the grid connection point. From the results, it can be concluded that clustering the WEC units improves the power output in terms of the peak/average ratio and standard deviation. Nevertheless, the power output variability is not completely improved. Consequently, additional techniques need to be carried out in order to achieve this goal; these techniques include filtering and valley filling, and their procedures are fully shown in Table 1.
7.2. Second Stage: Filtering and KESS Stage
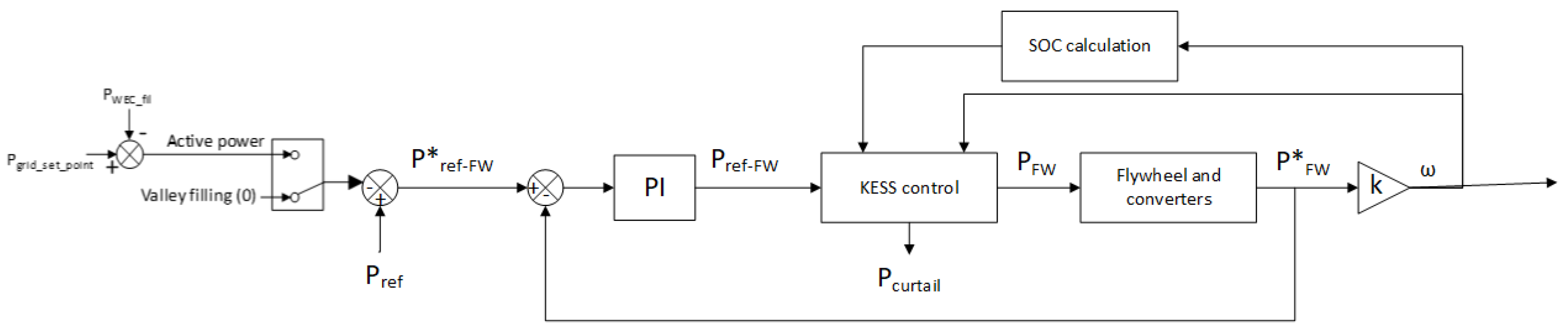
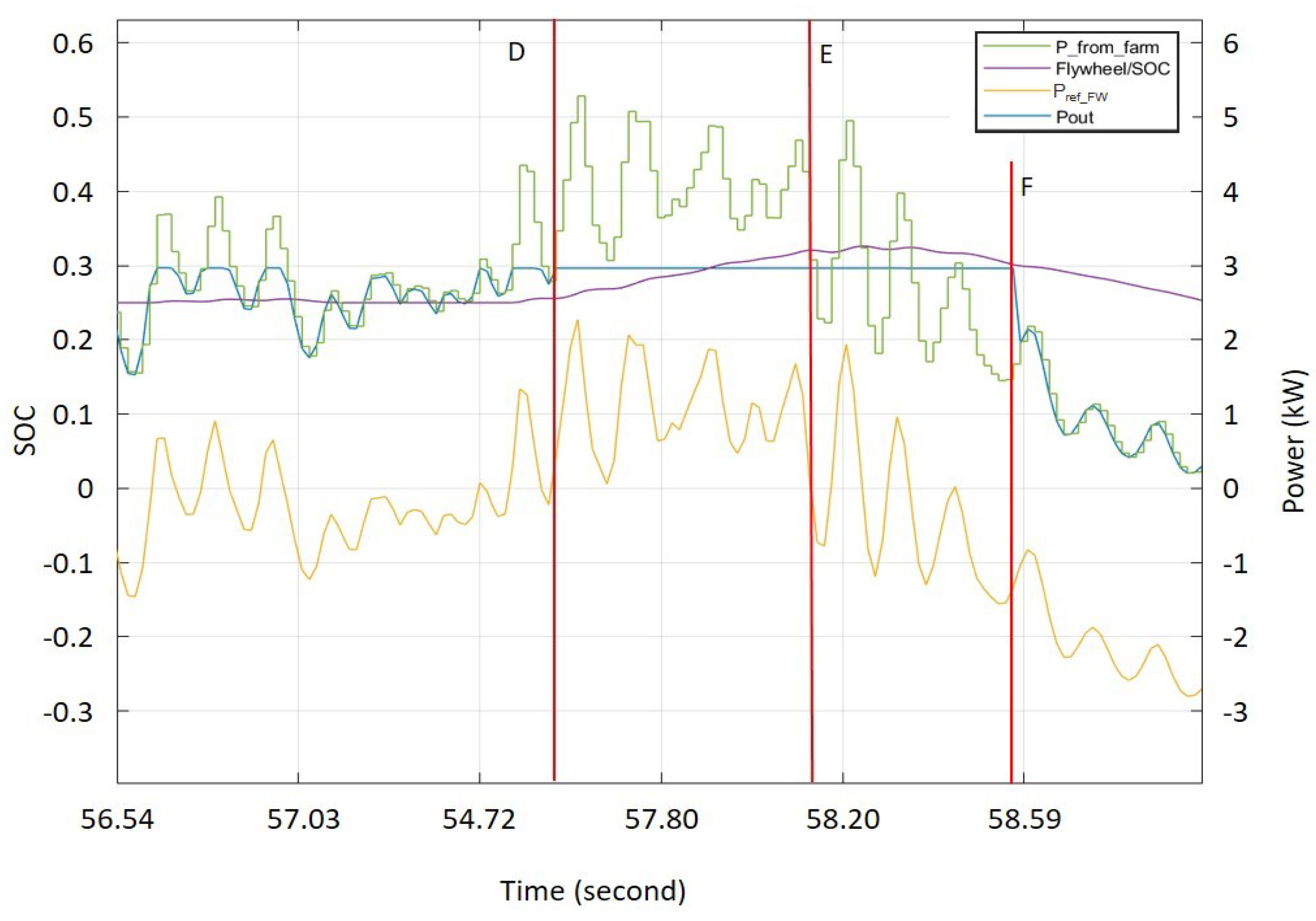
7.3. Active Power Control
8. Discussion
- First, aggregating a group of generators into one cluster results in a decreased Peak/Average power ratio and an improved normalized standard deviation (nSD).
- In addition, two clustered wave generators share the same magnitude order when referencing the peak values; this results in a notable increase in both the energy losses and the energy delivered to the grid (to the shore). This can be seen in Table 1, in which the results of aggregating Generators 2 and 3 are reported.
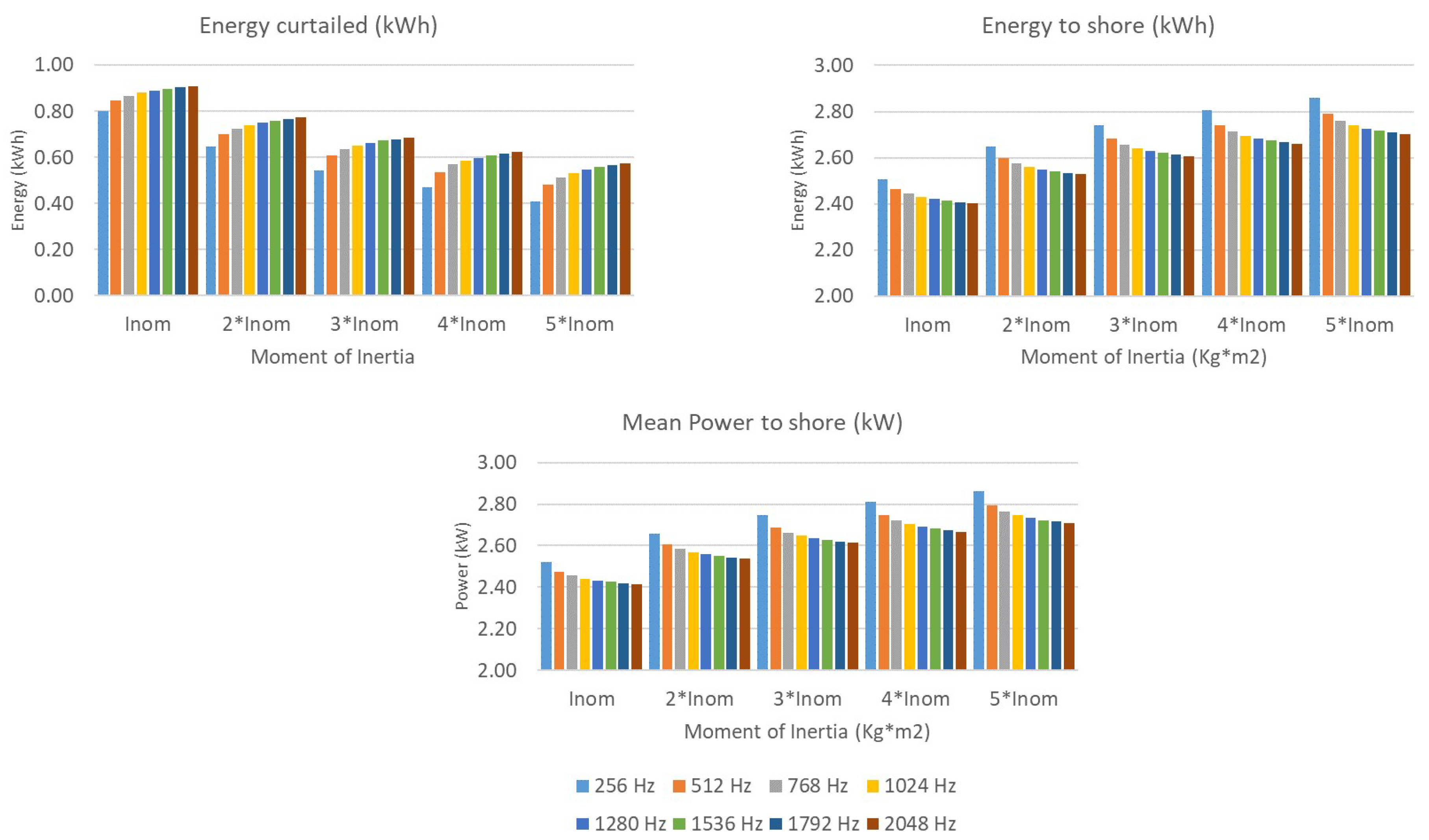
- Furthermore, the cut-off frequency of the low-pass filter is critical for the smoothing process. The study found an optimal cut-off frequency of 256 Hz; it not only filters the output power but also reduces the energy curtailment. Increasing the cut-off frequency of the filter above this optimal value does not decrease the losses in the substation or flywheel, but it increases the energy curtailment, which is not efficient.
- Moreover, increasing the moment of inertia of the flywheel (that is, increasing the cylinder height) results in a considerable decrease in the energy curtailment. Nevertheless, an appropriate criterion for choosing the cylinder size could be based on the related improvement in (1) the energy that is delivered to the shore and (2) the curtailed energy. This optimal value is achieved for a moment of inertia that is equal to 3.18 kg m, which corresponds to a flywheel size that is roughly 10% of the inverter’s size.
- In conclusion, almost all of the analyzed KPIs are considerably improved if the aforementioned smoothing techniques are carried out, such as the peak power to the shore, peak/mean power to the shore ratio, normalized standard deviation, and grid connection losses, all of which are decreased. These findings are a clear indicator of the effectiveness of the proposed simulated approach.
9. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
| Nominal power at 0.7 m/s | 10 kW |
| Voltage (line to line, rms at 0.7 m/s), | 200 V |
| Generator resistance, | 0.44 ± 1% |
| Generator inductance, | 11.7 mH |
| Air gap | 3 mm |
| Size of the magnet block | 6.5 × 35 × 100 mm |
| Pole width, | 50 mm |
| Number of stator sides | 4 |
| Vertical stator length | 1264 mm |
| Vertical translator length | 1867 mm |
| Transator resp. stator width | 400 mm |
| Translator weight | 1000 kg |
References
- Organization for Economic Cooperation and Development (OECD). World Energy Outlook; Technical Report; International Energy Agency: Paris, France, 2016; ISBN 978-92-64-26495-3. [Google Scholar]
- Uihlein, A.; Magagna, D. Wave and tidal current energy—A review of the current state of research beyond technology. Renew. Sustain. Energy Rev. 2016, 58, 1070–1081. [Google Scholar] [CrossRef]
- Falnes, J. A review of wave-energy extraction. Mar. Struct. 2007, 20, 185–201. [Google Scholar] [CrossRef]
- Prakash, S.; Mamun, K.; Islam, F.; Mudliar, R.; Pau’u, C.; Kolivuso, M.; Cadralala, S. Wave Energy Converter: A Review of Wave Energy Conversion Technology. In Proceedings of the 3rd Asia-Pacific World Congress on Computer Science and Engineering, Nadi, Fiji, 5–6 December 2016; pp. 71–77. [Google Scholar]
- Marine Energy—Wave Device The European Marine Energy Centre. 2019. Available online: http://www.emec.org.uk/marine-energy/wave-devices/ (accessed on 24 February 2019).
- Hong, Y.; Waters, R.; Boström, C.; Eriksson, M.; Engström, J.; Leijon, M. Review on electrical control strategies for wave energy converting systems. Renew. Sustain. Energy Rev. 2014, 31, 329–342. [Google Scholar] [CrossRef]
- Leijon, J. Simulation of a Linear Wave Energy Converter with Different Damping Control Strategies for Improved Wave Energy Extraction. Master’s Thesis, Uppsala University, Uppsala, Sweden, 2016. [Google Scholar]
- Babarit, A.; Guglielmi, M.; Clément, A.H. Declutching control of a wave energy converter. Ocean Eng. 2009, 36, 1015–1024. [Google Scholar] [CrossRef]
- Brito, M.; Teixeira, L.; Canelas, R.B.; Ferreira, R.M.; Neves, M.G. Experimental and Numerical Studies of Dynamic Behaviors of a Hydraulic Power Take-Off Cylinder Using Spectral Representation Method. ASME J. Tribol. 2017, 140, 021102. [Google Scholar] [CrossRef]
- De, O. Falcão, A.F. Modelling and control of oscillating-body wave energy converters with hydraulic power take-off and gas accumulator. Ocean Eng. 2007, 34, 2021–2032. [Google Scholar]
- De, O. Falcão, A.F. Phase control through load control of oscillating-body wave energy converters with hydraulic PTO system. Ocean Eng. 2008, 35, 358–366. [Google Scholar]
- Howlader, A.M.; Urasaki, N.; Yona, A.; Senjyu, T.; Saber, A.Y. A review of output power smoothing methods for wind energy conversion systems. Renew. Sustain. Energy Rev. 2013, 26, 135–146. [Google Scholar] [CrossRef]
- Rahm, M.; Svensson, O.; Boström, C.; Waters, R.; Leijon, M. Experimental results from the operation of aggregated wave energy converters. IET Renew. Power Gener. 2012, 6, 149–160. [Google Scholar] [CrossRef]
- Venugopal, V.; Smith, G.H. The effect of wave period filtering on wave power extraction and device tuning. Ocean Eng. 2007, 34, 1120–1137. [Google Scholar] [CrossRef]
- Godoy-Diana, R.; Czitrom, S.P. On the tuning of a wave-energy driven oscillating -water-column seawater pump to polychromatic waves. Ocean Eng. 2007, 34, 2374–2384. [Google Scholar] [CrossRef]
- Bedard, R.; Hagerman, G. E2I EPRI Assessment Offshore Wave Energy Conversion Devices; Electrical Innovation Institute: Washington, DC, USA, 2004. [Google Scholar]
- Moreno-Torres, P.; Blanco, M.; Navarro, G.; Lafoz, M. Power smoothing system for wave energy converters by means of a supercapacitor-based energy storage system. In Proceedings of the 2015 17th European Conference on Power Electronics and Applications (EPE’15 ECCE-Europe), Geneva, Switzerland, 8–10 September 2015; pp. 1–9. [Google Scholar]
- Blavette., A.; O’Sullivan, D.L.; Lewis, T.; Egan, M.G. Grid Integration of Wave and Tidal Energy. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; pp. 749–758. [Google Scholar]
- Lejerskog, E.; Boström, C.; Hai, L.; Waters, R.; Leijon, M. Experimental results on power absorption from a wave energy converter at the Lysekil wave energy research site. Renew. Energy 2015, 77, 9–14. [Google Scholar] [CrossRef]
- Ma, T.; Yang, H.; Lu, L. Development of hybrid battery–supercapacitor energy storage for remote area renewable energy systems. Appl. Energy 2015, 153, 56–62. [Google Scholar] [CrossRef]
- Parwal, A.; Fregelius, M.; Temiz, I.; Göteman, M.; de Oliveira, J.G.; Boström, C.; Leijon, M. Energy management for a grid-connected wave energy park through a hybrid energy storage system. Appl. Energy 2018, 231, 399–411. [Google Scholar] [CrossRef]
- Krings, A.; Soulard, J. Overview and comparison of iron loss models for electrical machines. J. Electr. Eng. 2010, 10, 162–169. [Google Scholar]
- Barranger, J. Hysteresis and Eddy-Current Losses of a Transformer Lamination Viewed as an Application of the Poynting Theorem; NASA Technical Note (TN-D-3114); National Aeronautics and Space Administration: Washington, DC, USA, 1965.
- Henderson, R. Design, simulation, and testing of a novel hydraulic power take-off system for the Pelamis wave energy converter. Renew. Energy 2006, 31, 271–283. [Google Scholar] [CrossRef]
- Zhao, X.; Yan, Z.; Zhang, X.P. A wind-wave farm system with self-energy storage and smoothed power output. IEEE Access 2016, 4, 8634–8642. [Google Scholar] [CrossRef]
- Maslen, E.H.; Schweitzer, G. Magnetic Bearings: Theory, Design, and Application to Rotating Machinery; Springer: Berlin, Germany, 2009. [Google Scholar]
- Bolund, B.; Bernhoff, H.; Leijon, M. Flywheel energy and power storage systems. Renew. Sustain. Energy Rev. 2007, 11, 235–258. [Google Scholar] [CrossRef]
- Arani, A.K.; Karami, H.; Gharehpetian, G.; Hejazi, M. Review of Flywheel Energy Storage Systems structures and applications in power systems and microgrids. Renew. Sustain. Energy Rev. 2017, 69, 9–18. [Google Scholar] [CrossRef]
- Infield, D.; Hill, J. Literature Review: Electrical Energy Storage for Scotland; University of Strathclyde: Glasgow, UK, 2015. [Google Scholar]
- Amaris, H.; Alonso, M.; Alvarez, C. Reactive Power Management of Power Networks with Wind Generation; Springer: Berlin, Germany, 2013. [Google Scholar]
- Amaris, H.; Alonso, M. Coordinated reactive power management in power networks with wind turbines and FACTS devices. Energy Convers. Manag. 2011, 52, 2575–2586. [Google Scholar] [CrossRef]
- Asociación Española de Normalización. UNE-EN 50160: Voltage Characteristics of Electricity Supplied by Public Electricity Networks; Technical Report; Asociación Española de Normalización: Madrid, Spain, 2011; 2011/A1:2015. [Google Scholar]
- Amiryar, M.E.; Pullen, K.R. A review of flywheel energy storage system technologies and their applications. Appl. Sci. 2017, 7, 286. [Google Scholar] [CrossRef]
- Diaz-Gonzalez, F.; Bianchi, F.D.; Sumper, A.; Gomis-Bellmunt, O. Control of a flywheel energy storage system for power smoothing in wind power plants. IEEE Trans. Energy Convers. 2014, 29, 204–214. [Google Scholar] [CrossRef]
- Gurumurthy, S.R.; Agarwal, V.; Sharma, A. Optimal energy harvesting from a high-speed brushless DC generator-based flywheel energy storage system. IET Electr. Power Appl. 2013, 7, 693–700. [Google Scholar] [CrossRef]
- Wang, L.; Yu, J.Y.; Chen, Y.T. Dynamic stability improvement of an integrated offshore wind and marine-current farm using a flywheel energy-storage system. IET Renew. Power Gener. 2011, 5, 387–396. [Google Scholar] [CrossRef]
- Park, J.D.; Kalev, C.; Hofmann, H.F. Control of high-speed solid-rotor synchronous reluctance motor/generator for flywheel-based uninterruptible power supplies. IEEE Trans. Ind. Electron. 2008, 55, 3038–3046. [Google Scholar] [CrossRef]
- Li, W.; Chau, K.; Ching, T.; Wang, Y.; Chen, M. Design of a high-speed superconducting bearingless machine for flywheel energy storage systems. IEEE Trans. Appl. Supercond. 2015, 25. [Google Scholar] [CrossRef]
- Sihler, C.; Miri, A.M. A stabilizer for oscillating torques in synchronous machines. IEEE Trans. Ind. Appl. 2005, 41, 748–755. [Google Scholar] [CrossRef]
- Recheis, M.N.; Schweighofer, B.; Fulmek, P.; Wegleiter, H. Selection of magnetic materials for bearingless high-speed mobile flywheel energy storage systems. IEEE Trans. Magn. 2014, 50, 1–4. [Google Scholar] [CrossRef]
- Faraji, F.; Majazi, A.; Al-Haddad, K. A comprehensive review of Flywheel Energy Storage System technology. Renew. Sustain. Energy Rev. 2017, 67, 477–490. [Google Scholar]
- Abrahamsson, J.; Hedlund, M.; Kamf, T.; Bernhoff, H. High-speed kinetic energy buffer: Optimization of composite shell and magnetic bearings. IEEE Trans. Ind. Electron. 2014, 61, 3012–3021. [Google Scholar] [CrossRef]
- Ibarra-Berastegi, G.; Sáenz, J.; Ulazia, A.; Serras, P.; Esnaola, G.; Garcia-Soto, C. Electricity production, capacity factor, and plant efficiency index at the Mutriku wave farm (2014–2016). Ocean Eng. 2018, 147, 20–29. [Google Scholar] [CrossRef]
- Tedeschi, E.; Santos-Mugica, M. Modeling and control of a wave energy farm including energy storage for power quality enhancement: The bimep case study. IEEE Trans. Power Syst. 2014, 29, 1489–1497. [Google Scholar] [CrossRef]
- California Energy Commission. Flywheel Systems for Utility Scale Energy Storage: A Transformative Flywheel Project for Commercial Readiness; Technical Report; California Energy Commission: Union City, CA, USA, 2019.
- Zhou, Z.; Benbouzid, M.; Charpentier, J.F.; Scuiller, F.; Tang, T. A review of energy storage technologies for marine current energy systems. Renew. Sustain. Energy Rev. 2013, 18, 390–400. [Google Scholar] [CrossRef]
- Hebner, R.; Beno, J.; Walls, A. Flywheel batteries come around again. IEEE Spectr. 2002, 39, 46–51. [Google Scholar] [CrossRef]
- Bleuler, H.; Sandtner, J.; Regamey, Y.J.; F Barrot, A. Passive Magnetic Bearings for Flywheels. Solid Mechanics and Its Applications 2005. Available online: http://www.researchgate.net/publication/228554073_Passive_Magnetic_Bearings_for_Flywheels (accessed on 24 February 2019).
- Wang, W.; Hofmann, H.; Bakis, C.E. Ultrahigh speed permanent magnet motor/generator for aerospace flywheel energy storage applications. In Proceedings of the IEEE International Conference on Electric Machines and Drives, San Antonio, TX, USA, 15 May 2005; pp. 1494–1500. [Google Scholar]
- International Energy Agency. Implementing Agreement on Ocean Energy Systems; Technical Report; IEA-OES Executive Committee: Lisbon, Portugal, 2009. [Google Scholar]
- Boström, C. Electrical Systems for Wave Energy Conversion. Ph.D. Thesis, Uppsala University, Uppsala, Sweden, 2011. [Google Scholar]
- Waters, R.; Engström, J.; Isberg, J.; Leijon, M. Wave climate of the Swedish west coast. Renew. Energy 2009, 34, 1600–1606. [Google Scholar] [CrossRef]
- Rahm, M.; Boström, C.; Svensson, O.; Grabbe, M.; Bulow, F.; Leijon, M. Offshore underwater substation for wave energy converter arrays. IET Renew. Power Gener. 2010, 4, 602–612. [Google Scholar] [CrossRef]
- Rémouit, F.; Chatzigiannakou, M.A.; Bender, A.; Temiz, I.; Sundberg, J.; Engström, J. Deployment and Maintenance of Wave Energy Converters at the Lysekil Research Site: A Comparative Study on the Use of Divers and Remotely-Operated Vehicles. J. Mar. Sci. Eng. 2018, 6, 39. [Google Scholar] [CrossRef]
- Melo, A.B.; Villate, J.L. Annual Report 2016; Technical Report; Executive Committee of Ocean Energy Systems: Lisbon, Portugal, 2016. [Google Scholar]
- Lysekil Wave Energy Site. 2018. Available online: https://tethys.pnnl.gov/annex-iv-sites/lysekil-wave-energy-site (accessed on 6 May 2018).
- Leijon, M.; Boström, C.; Danielsson, O.; Gustafsson, S.; Haikonen, K.; Langhamer, O.; Strömstedt, E.; Stålberg, M.; Sundberg, J.; Svensson, O.; et al. Wave energy from the North Sea: Experiences from the Lysekil research site. Surv. Geophys. 2008, 29, 221–240. [Google Scholar] [CrossRef]
- Lejerskog, E.; Gravråkmo, H.; Savin, A.; Strömstedt, E.; Tyrberg, S.; Haikonen, K.; Krishna, R.; Boström, C.; Rahm, M.; Ekström, R.; et al. Lysekil research site, Sweden: A status update. In Proceedings of the 9th European Wave and Tidal Energy Conference, Southampton, UK, 5–9 September 2011. [Google Scholar]
- Svensson, O.; Boström, C.; Rahm, M.; Leijon, M. Description of the control and measurement system used in the low voltage marine substation at the Lysekil research site. In Proceedings of the 8th European Wave and Tidal Energy Conference, Uppsala, Sweden, 7–10 September 2009. [Google Scholar]
- Mätdata-Islandsberg. 2018. Available online: http://islandsberg.angstrom.uu.se/ (accessed on 22 April 2018).
- Boström, C.; Waters, R.; Lejerskog, E.; Svensson, O.; Stalberg, M.; Stromstedt, E.; Leijon, M. Study of a wave energy converter connected to a nonlinear load. IEEE J. Ocean. Eng. 2009, 34, 123–127. [Google Scholar] [CrossRef]
- Castellucci, V.; García-Terán, J.; Eriksson, M.; Padman, L.; Waters, R. Influence of sea state and tidal height on wave power absorption. IEEE J. Ocean. Eng. 2017, 42, 566–573. [Google Scholar] [CrossRef]
- Waters, R.; Stålberg, M.; Danielsson, O.; Svensson, O.; Gustafsson, S.; Strömstedt, E.; Eriksson, M.; Sundberg, J.; Leijon, M. Experimental results from sea trials of an offshore wave energy system. Appl. Phys. Lett. 2007, 90, 034105. [Google Scholar] [CrossRef]
- Hedlund, M. Electrified Integrated Kinetic Energy Storage. Ph.D. Thesis, Uppsala University, Uppsala, Sweden, 2017. [Google Scholar]
- Hedlund, M.; Abrahamsson, J.; Pérez-Loya, J.J.; Lundin, J.; Bernhoff, H. Eddy currents in a passive magnetic axial thrust bearing for a flywheel energy storage system. Int. J. Appl. Electromagn. Mech. 2017, 54, 389–404. [Google Scholar] [CrossRef]
- Hedlund, M.; Lundin, J.; de Santiago, J.; Abrahamsson, J.; Bernhoff, H. Flywheel energy storage for automotive applications. Energies 2015, 8, 10636–10663. [Google Scholar] [CrossRef]
- Gorland, S.H.; Kempke, E.E., Jr.; Lumannick, S. Experimental Windage Losses for Close Clearance Rotating Cylinders in the Turbulent Flow Regime; Technical Report; NASA Technical Memorandum: Washington, DC, USA, 1970.
- Bostrom, C.; Leijon, M. Operation analysis of a wave energy converter under different load conditions. IET Renew. Power Gener. 2011, 5, 245–250. [Google Scholar] [CrossRef]
- Larsson, K. Investigation of a Wave Energy Converter with a Flywheel and a Corresponding Generator Design. Master’s Thesis, Chalmers University of Technology, Göteborg, Sweden, 2012. [Google Scholar]
- Abram, N.J.; McGregor, H.V.; Tierney, J.E.; Evans, M.N.; McKay, N.P.; Kaufman, D.S.; Thirumalai, K.; Martrat, B.; Goosse, H.; Phipps, S.J.; et al. Early onset of industrial-era warming across the oceans and continents. Nature 2016, 536, 411. [Google Scholar] [CrossRef]
- Tornelli, C.; Zuelli, R.; Marinelli, M.; Rezkalla, M.M.; Heussen, K.; Morch, A.Z.; Cornez, L.; Zaher, A.S.; Catterson, V. Key Requirements for Future Control Room Functionality; Technical Report, The ELECTRA EU Research Project; University of Oldenburg: Oldenburg, Germany, 2015. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Peak (kW) | Mean (kW) | Peak/Ave. | Normalized Standard Deviation | Energy to Shore (kWh) | Grid Losses (Wh) | |
|---|---|---|---|---|---|---|
| WEC1 | 9.94 | 0.81 | 12.28 | 1.54 | 0.81 | 0.85 |
| WEC2 | 40.82 | 1.29 | 32.71 | 1.75 | 1.25 | 2.42 |
| WEC3 | 30.09 | 1.35 | 22.32 | 1.52 | 1.35 | 2.48 |
| WEC (1 + 2) | 42.83 | 2.06 | 20.82 | 1.23 | 2.05 | 4.12 |
| WEC (1 + 3) | 33.98 | 2.16 | 15.75 | 1.12 | 2.15 | 4.26 |
| WEC (2 + 3) | 45.30 | 2.60 | 17.45 | 1.16 | 2.59 | 6.20 |
| All WECs | 45.58 | 3.41 | 13.39 | 0.96 | 3.4 | 8.840 |
| Peak (kW) | Mean (kW) | Peak/Ave. | Grid Losses (Wh) | Curtailed Energy (kWh) | Energy to Shore (kWh) | Normalized Standard Deviation | |
|---|---|---|---|---|---|---|---|
| WEC clustering | 45.58 | 3.41 | 13.39 | 8.84 | − | 3.40 | 0.96 |
| LPF at 256 Hz | 9.23 | 2.52 | 3.66 | 12.72 | − | 2.51 | 0.58 |
| KESS (3.18 kg.m2) | 9.23 | 2.91 | 3.17 | 4.37 | 0.36 | 2.92 | 0.49 |
| Active power control | 4.56 | 2.68 | 1.71 | 3.47 | 0.70 | 2.68 | 0.44 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rojas-Delgado, B.; Alonso, M.; Amaris, H.; de Santiago, J. Wave Power Output Smoothing through the Use of a High-Speed Kinetic Buffer. Energies 2019, 12, 2196. https://doi.org/10.3390/en12112196
Rojas-Delgado B, Alonso M, Amaris H, de Santiago J. Wave Power Output Smoothing through the Use of a High-Speed Kinetic Buffer. Energies. 2019; 12(11):2196. https://doi.org/10.3390/en12112196
Chicago/Turabian StyleRojas-Delgado, Brenda, Monica Alonso, Hortensia Amaris, and Juan de Santiago. 2019. "Wave Power Output Smoothing through the Use of a High-Speed Kinetic Buffer" Energies 12, no. 11: 2196. https://doi.org/10.3390/en12112196
APA StyleRojas-Delgado, B., Alonso, M., Amaris, H., & de Santiago, J. (2019). Wave Power Output Smoothing through the Use of a High-Speed Kinetic Buffer. Energies, 12(11), 2196. https://doi.org/10.3390/en12112196