1. Introduction
Worldwide, climate policies have encouraged the development of energy from renewable resources, such that, within Europe, 11.6% of energy demand was provided solely from wind energy in 2018 [
1]. The installed capacity of offshore wind turbines has increased globally by 87%, between 2016 and 2017, rising to a total of nearly 19 GW [
2], of which floating turbines currently play only a small part. Indeed, the world’s first floating farm, with a capacity of 30 MW only came online in 2017. However, due to the limited availability of offshore sites with shallow beds and low seabed slope, the industry is looking towards floating solutions in the future, with predictions of 5 GW of installed energy from floating wind by 2030. This would amount to 5% of the offshore wind market [
2].
Generally, for floating platforms, the horizontal axis wind turbine (HAWT) specifics used for prototypes, model experimentation, and simulation purposes are largely those that have been originally designed for onshore locations. Although they are further modified for the offshore environment, the turbines, including most components and the controllers, have generally been optimized for a foundation fixed into the seabed. This has implications for the applicability of these simulations to floating platforms. Turbine loads, for example, are often increased when the HAWT is mounted on a floating platform, although the exact load, magnitude, and origin will vary, depending upon the platform design and environmental factors. Prominent load increases are usually the induced tower base bending moments, with extreme loads increasing by a factor as high as 1.6 times that seen in a fixed, land-based turbine [
3]. Thus, the increased tower base axial fatigue could cause a large reduction in the expected life of the turbine, and therefore, there is a need to have more costly tower and platform structures in order to align with the standard 25–30 yr design life of modern offshore wind farms.
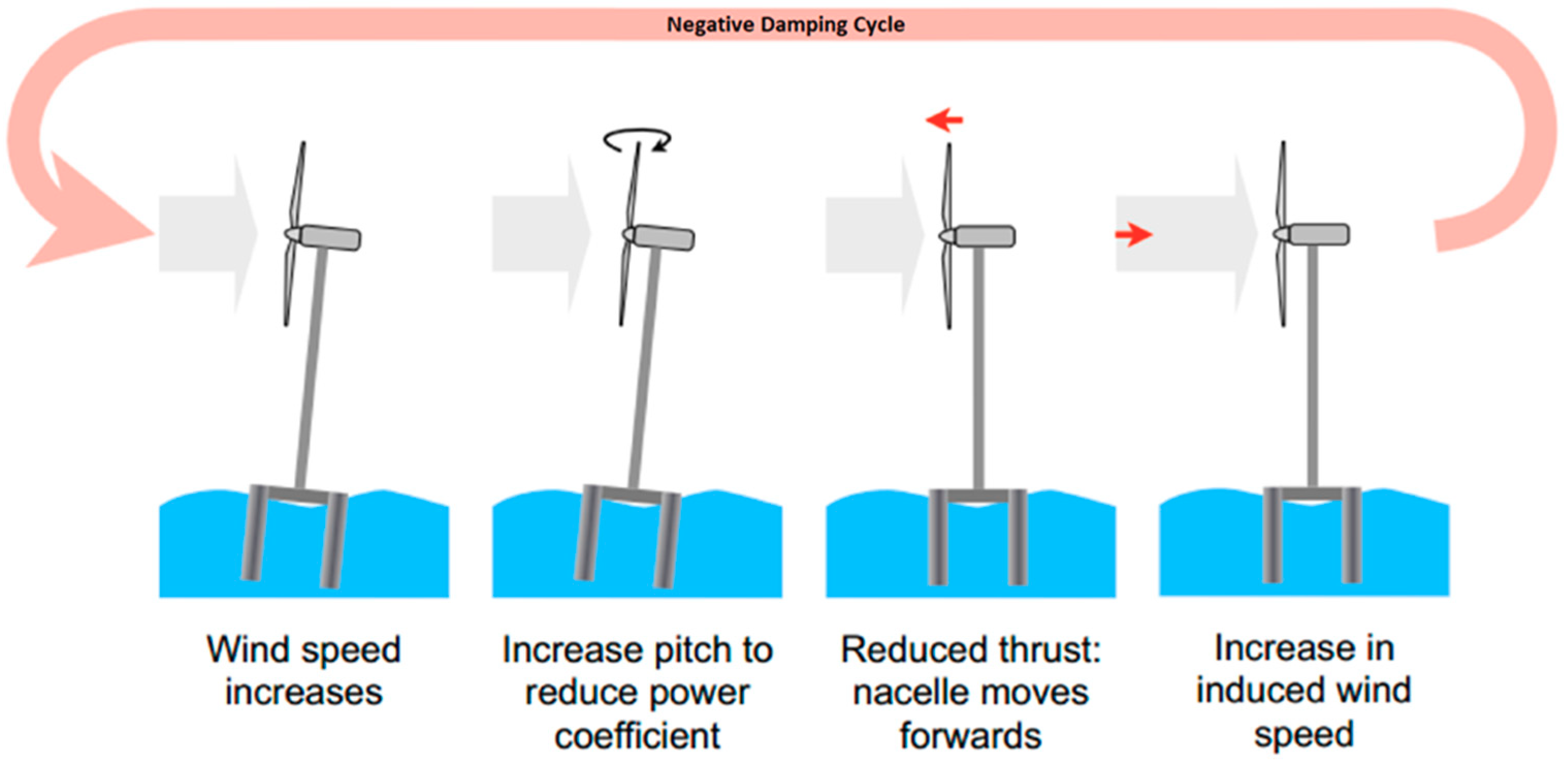
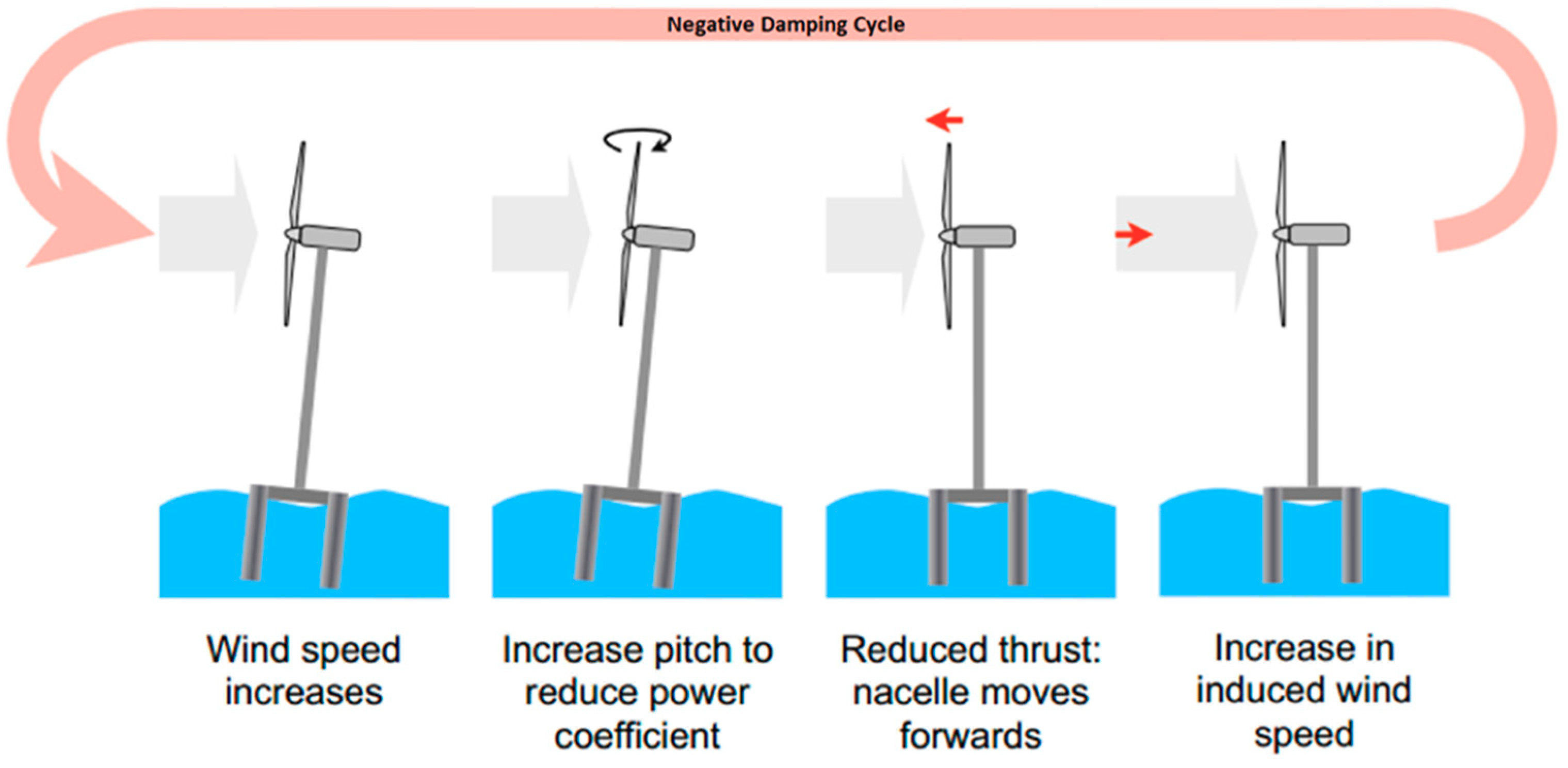
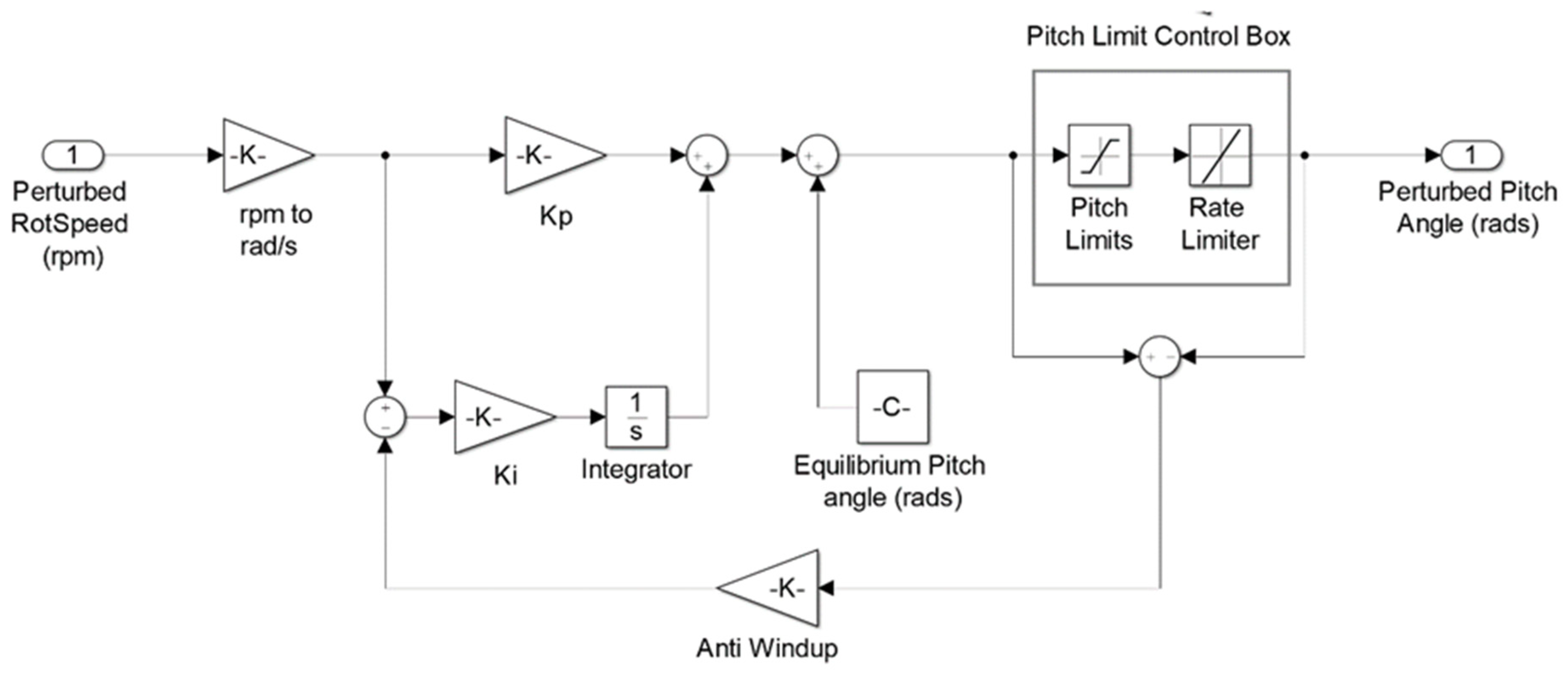
Currently, all large (3 MW+), variable speed, variable pitch, employ HAWTs pitch-to-feather to control the power output above rated wind speeds. Whether these turbines are fixed on dry land, the seabed, or floating offshore, they can experience a phenomenon when wind speeds exceed the rated wind speed, which is generally referred to as “negative damping”. This is due to a decrease in rotor thrust at constant rotor speed as the wind speed increases. This can then lead directly to tower fore–aft oscillation, hence, decreased tower axial fatigue life if not controlled, as illustrated in
Figure 1 [
4]. Fixed turbines can avoid the negative damping effect without a loss in performance as the natural frequency of the blade pitch control system is lower than the first resonance modes of the tower. However, for floating offshore wind turbines (FOWTs), the frequency of the motions (surge, sway, roll, and pitch) are one or more orders of magnitudes lower than for a fixed-base turbine, and therefore, the pitch controller frequency must be lower to avoid negative damping. This causes a reduction in the performance of the rotor speed when operating at above rated wind speeds, such that the ideal constant rotor speed fluctuates around the desired output, leading to more undesirable fluctuations in the generated power output [
5].
Horizontal axis wind turbines with variable speed and variable pitch are now considered the industrial standard for large turbines. However, utilising active pitch-to-stall rather than pitch-to-feather control, where the blade is rotated so that the induced aerodynamic stall slows down the rotor to produce constant rotor speed, has largely been ignored. This omission is because the pitch-to-stall configuration can lead to increased blade deflections in larger, softer blades and reduced predictability in terms of induced lift and drag at a specific angle of attack. The issues related to the negative damping phenomenon can, however, be avoided by design when in pitch-to-stall operation, as the rotor thrust at constant rotor speed does not decrease as the wind speed increases. This increasing thrust allows the control frequency to be higher than typically expected on an FOWT, resulting in a much improved rotor speed performance and high-quality, regulated power. As such, utilising pitch-to-stall configurations could thus offer a solution to the performance reduction seen by current, industry-standard pitch-to-feather floating turbines.
Only two studies, by Larsen and Hanson [
5] and Jonkman [
6], have been conducted on large, variable speed, floating HAWTs that consider actively pitching the whole blade towards stall as a means to provide a near constant rotor speed at above rated wind speeds. This is partly due to the ambiguity that remains on the aerodynamic behavior of stalled blades [
7]. Increased loads and deflection on stalling blades can also dictate that the blades are heavier [
8], which would have a negative impact upon the rotor and turbine. The peak loads that can occur on a passive stall blade when power is not shed fast enough would, however, be more controlled when the stall blade is being actively pitched as the power control is more regulated at higher wind speed than in a pitch-to-feather control system. Therefore, although the thrust loads acting on a turbine are increased as the angle of attack increases, it also varies less with pitch angle changes, such that the thrust and the torque have increased stability when operating with pitch-to-stall blades [
7]. This reduced variance in the thrust and torque responses will tend to have an overall benefit in terms of tower axial fatigue life. One of the studies simulated turbine, platform, and mooring responses of the Hywind spar concept for a 12 m/s mean turbulent stochastic wind, using a non-linear time domain simulation tool based on SIMO/RIFLEX, developed by Marintex, Trondheim, Norway and HAWC2, developed by DTU (Technical University of Denmark), Risø Campus, Denmark [
5]. The simulation results for active pitch-to-stall control indicated not only improved regulation of rotor speed and power generation, but also saw more tower stability. These results were obtained even though the simulations used a blade designed for pitch-to-feather control. In fact, the authors, by accidentally making a pitch angle sign error in the pitch-to-feather control strategy, were using a pitch-to-feather wind turbine system in a pitch-to-stall mode. Hence, the design of the blades, controller, controller gains, and all components were from that original pitch-to-feather system. In the second study, Jonkman [
6] looked at simulated responses for a floating barge in 18 m/s mean turbulent stochastic winds when actively pitching-to-stall as well as when actively pitching-to-feather. The results were generated with the aero-servo-elastic simulation package, FAST 7. In the simulations, rotor speed and power regulation again increased with stall control, as compared to feather control. However, this was at the expense of an increase in the tower motion. This difference in the impact of pitch-to-stall on tower stability between the two studies, such that for a spar response changes were beneficial, yet they were detrimental to the barge, indicates that the responses were very platform-type specific. The question of whether tower stability would be improved for a semi-submersible platform operating with a pitch-to-stall rotor has not been addressed to date. The impact of the platform-type is supported by the fact that the barge design also led to instability of the tower in pitch-to-feather control [
6]. Although the blade used was also of a pitch-to-feather design (comparable to that used in the Larsen and Hanson [
5] study), it had altered aerofoil lift coefficients, leading to a smoother change in lift coefficient being experienced over the range of angle-of-attack experienced along the blade length, during pitch-to-stall control. It was suggested by Jonkman [
6] that a higher level of damping in pitch-to-stall could possibly be achieved if the aerofoil coefficients and rotor design were altered such that the rotor thrust continually increased from cut-in to cut-out wind speeds.
The optimisation of blade twist and its resultant effects have been extensively studied for pitch-to-feather and fixed-pitch stall configurations using a number of methods [
9,
10,
11]. In such instances, the design criteria commonly focuses on maximising the power coefficient and reducing blade vibrations and fatigue. Stäblein et al. [
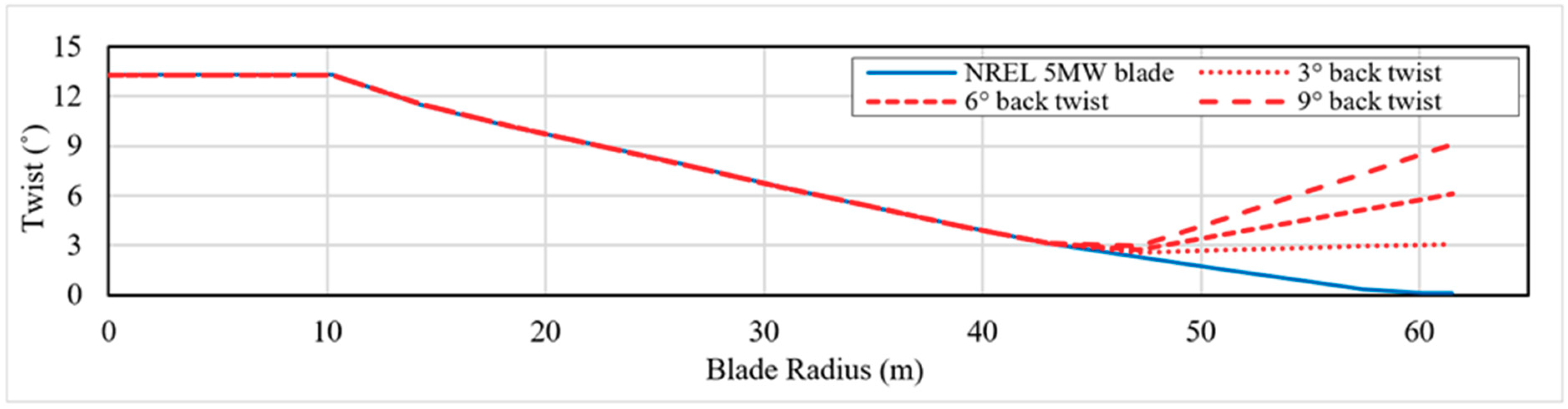
10] achieved increased platform damping, and hence, reductions in tower fore–aft moment from blade twist modifications. For fixed-stall blades, a back twist was employed (the blade twists back towards feather at the tip for a proportion of the blade’s length) which resulted in the air flow remaining attached at the blade tip for higher wind speeds, thus increasing the power production capabilities of these sections of the blade [
9]. By contrast, the benefits of actively pitching blades are often obtained at the expense of an increased blade pitching rate, and hence, actuator action which can impact on component life and operational costs. However, damage to the pitch bearing was not found to be adversely proportional to pitch rate increase when the blade flapwise loading was also reduced [
12]. Merz [
9] performed in-depth research on fixed-pitch stall blades and designed a family of optimised blades to minimize the cost of a unit of energy using simulations in the linear frequency domain. Investigation of the effects of including a back twist of a few degrees, originating at different points along the blade’s length were performed (starting from 5 to 22% of the blade length as measured from the tip). This resulted in a high level of aerodynamic damping at all operational wind speeds. Stäblein et al. [
10] analyzed the effect of additional blade twist from simulations produced utilizing the non-linear time domain aero-servo-elastic simulation tool HAWCStab2, developed by DTU, Risø Campus, Denmark, specifically for wind turbines designed by DTU. This applied a twist to the blades of a land-based 10 MW DTU turbine under pitch-to-feather control. Models investigated changing the blade twist towards both feather and stall from as high up the blade as 70% of the blade radius from the tip. Reductions in both the blade root’s flapwise moment and the tower base’s fore–aft moment were seen, however, this study was not carried out for a floating turbine. Floating platforms need platform pitch frequencies to be below 0.05 Hz to avoid the wave excitation frequencies, thus the rotor speed would need to be actively controlled to dampen the platform’s pitch motion [
9].
The question of whether a variable pitch-to-stall, variable speed FOWT could reduce the tower base’s fore–aft moment through blade design manipulation has not as yet been studied. Reductions in the blade root flapwise moments could decrease the tower base fore–aft moments, and therefore increase tower fatigue life. Improved rotor speed performance, and therefore higher quality energy regulation would also be anticipated due to the higher control frequency available to a variable pitch-to-stall controller. It is also worth noting that, whilst a dominant wind turbine floating platform type has not yet materialised on the market, it is desirable for research to have the potential to benefit more than one platform type.
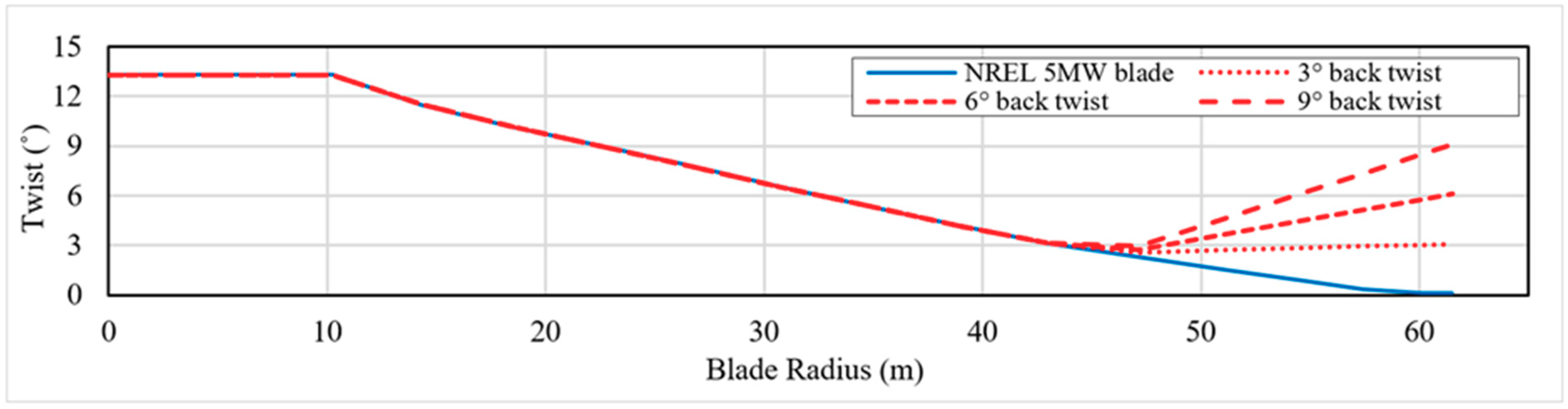
To investigate the potential of active pitch-to-stall on a semi-submersible floating platform, this study investigates its possible benefits in terms of rotor speed performance, power generation, and tower base fore–aft moment-induced fatigue reduction. This study was conducted for a 5-MW floating turbine with a stall blade incorporating back twist (towards feather) nearer the tip. This research did not concern itself with the optimization of an actively pitching-to-stall blade or other systems loads, but rather focused on the effects of increasing back twist on tower fore–aft fatigue life, which can in turn be used to optimise the back twist for turbine life extension. This twist optimization was carried out for three specific wind and wave conditions. This is a method proposed by Stäblein et al. [
13], as designing around an optimum tip speed ratio is not possible for a back-twisting blade. The 5 MW turbine was coupled to a floating semisubmersible platform, as this type of floater has not been previously investigated with an active pitch-to-stall control strategy and suffers from increased fore–aft oscillations of the tower, and therefore could benefit from this alternative control approach. Furthermore, the Carbon Trust’s report for the Scottish government also found that semisubmersibles had a better levelized cost of energy (LCoE) overall, compared to other platform types [
14]. Thus, in combination with other benefits (e.g., that a semisubmersible could possibly be towed back to shore for maintenance, repair, and commissioning), this floating platform type is an attractive option [
15].
4. Discussion
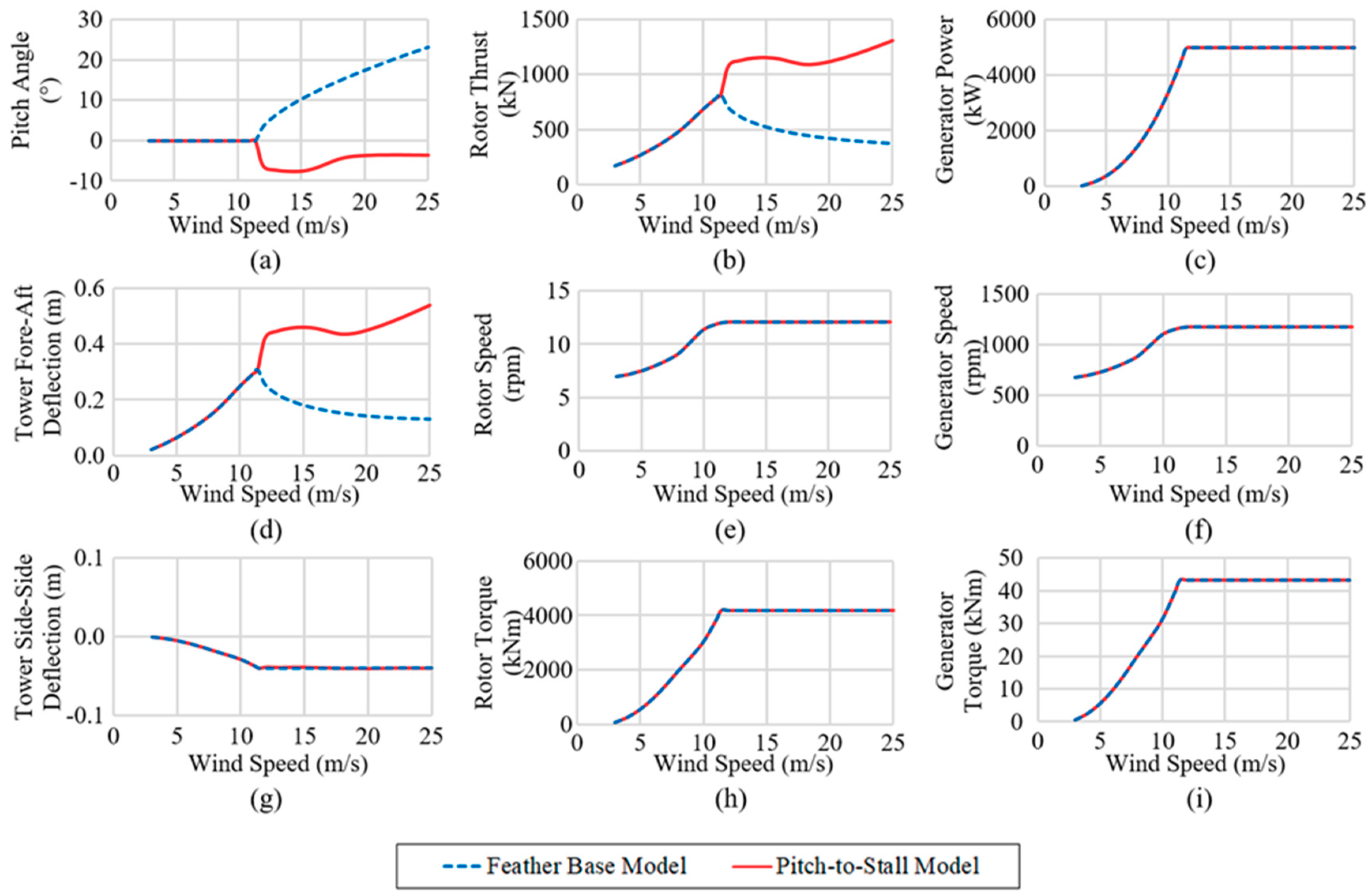
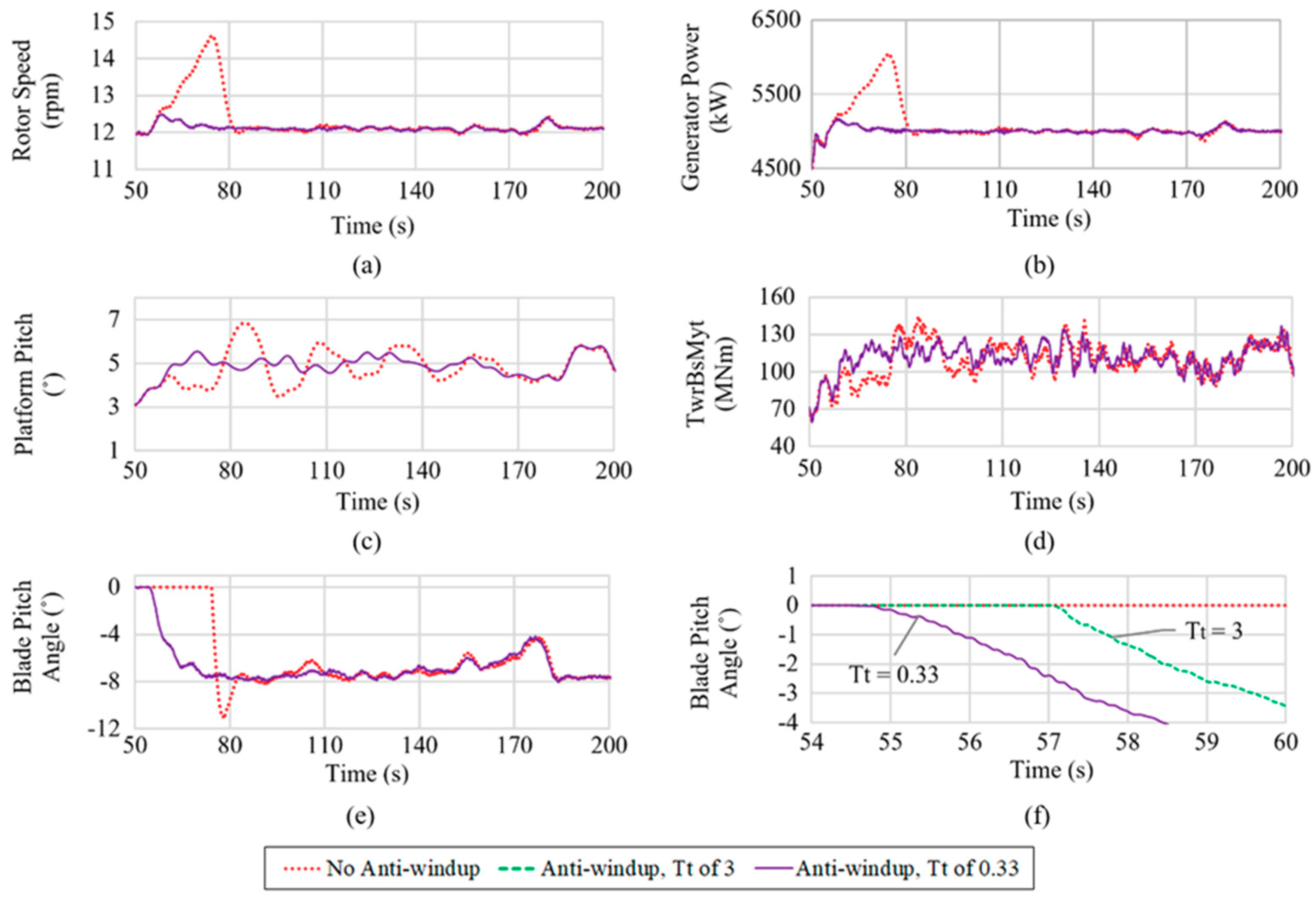
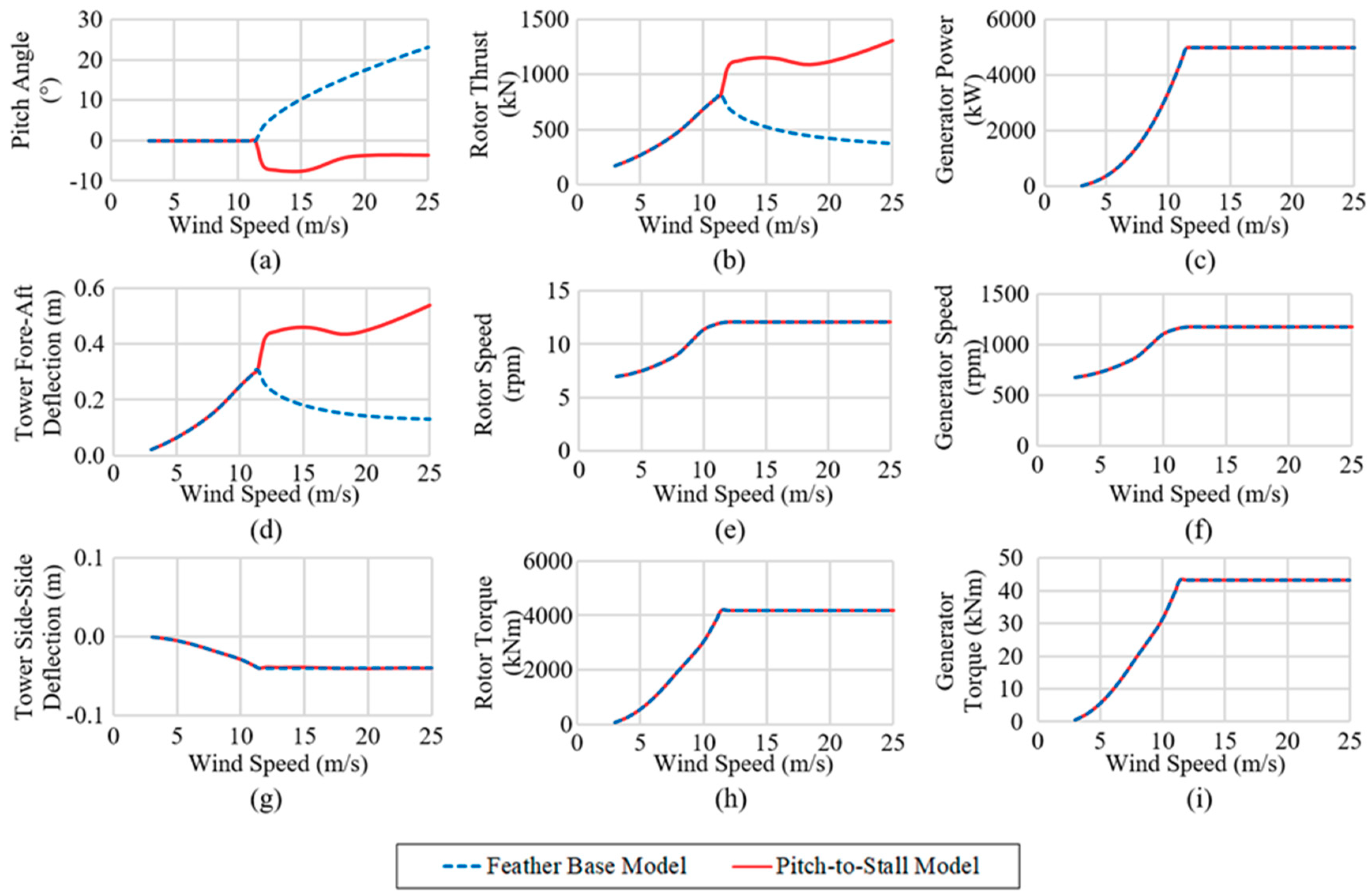
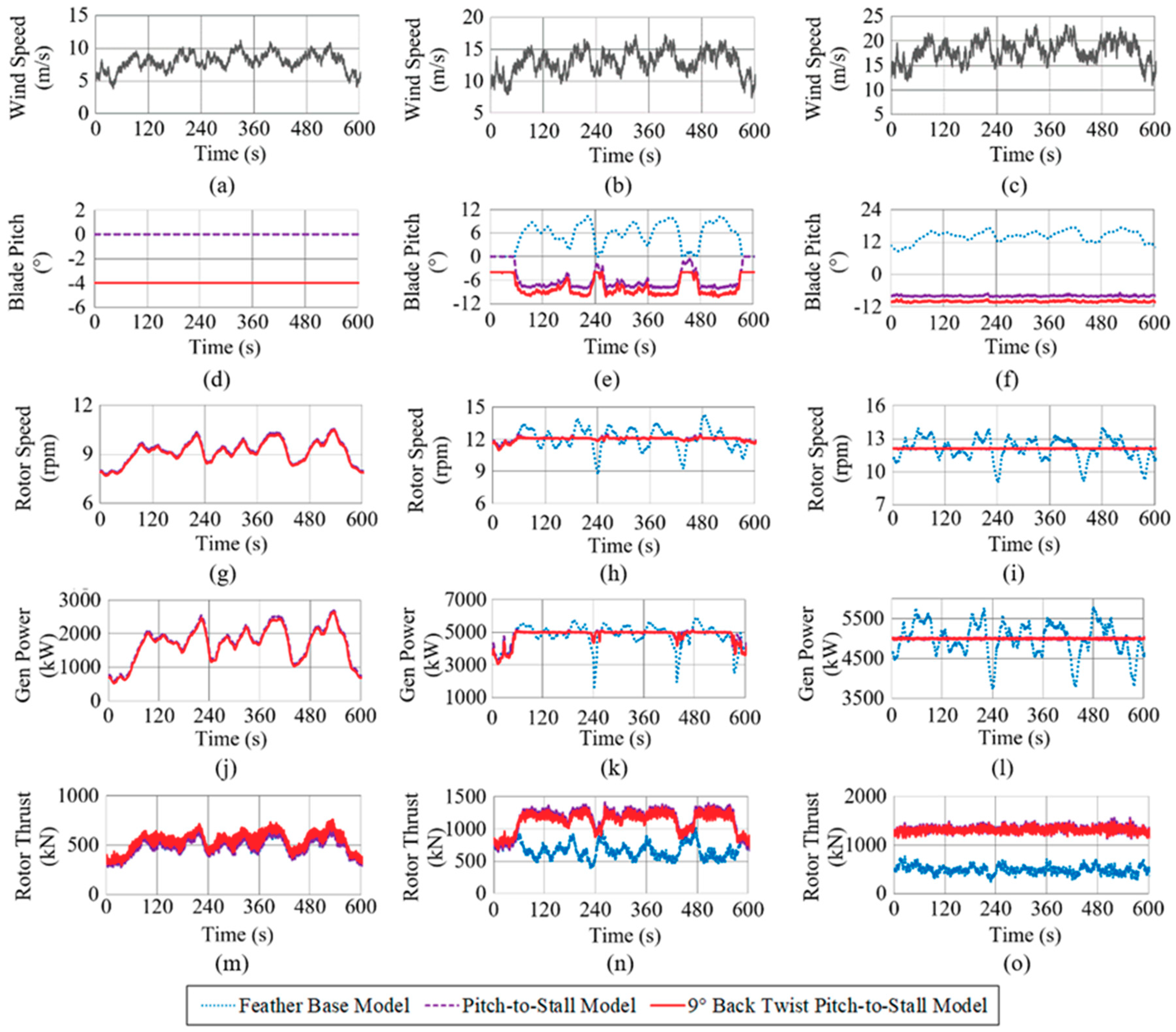
For stall operation, a big reduction in the blade pitch actuation range (defined as the pitch angle) was seen (
Figure 4a), a requirement of approximately 8° compared to a 23° for feather pitch control. This does not, however, correlate into a reduction in blade pitch actuation rate, as this tends to increase whenever control frequencies are higher, as allowed in pitch-to-stall control.
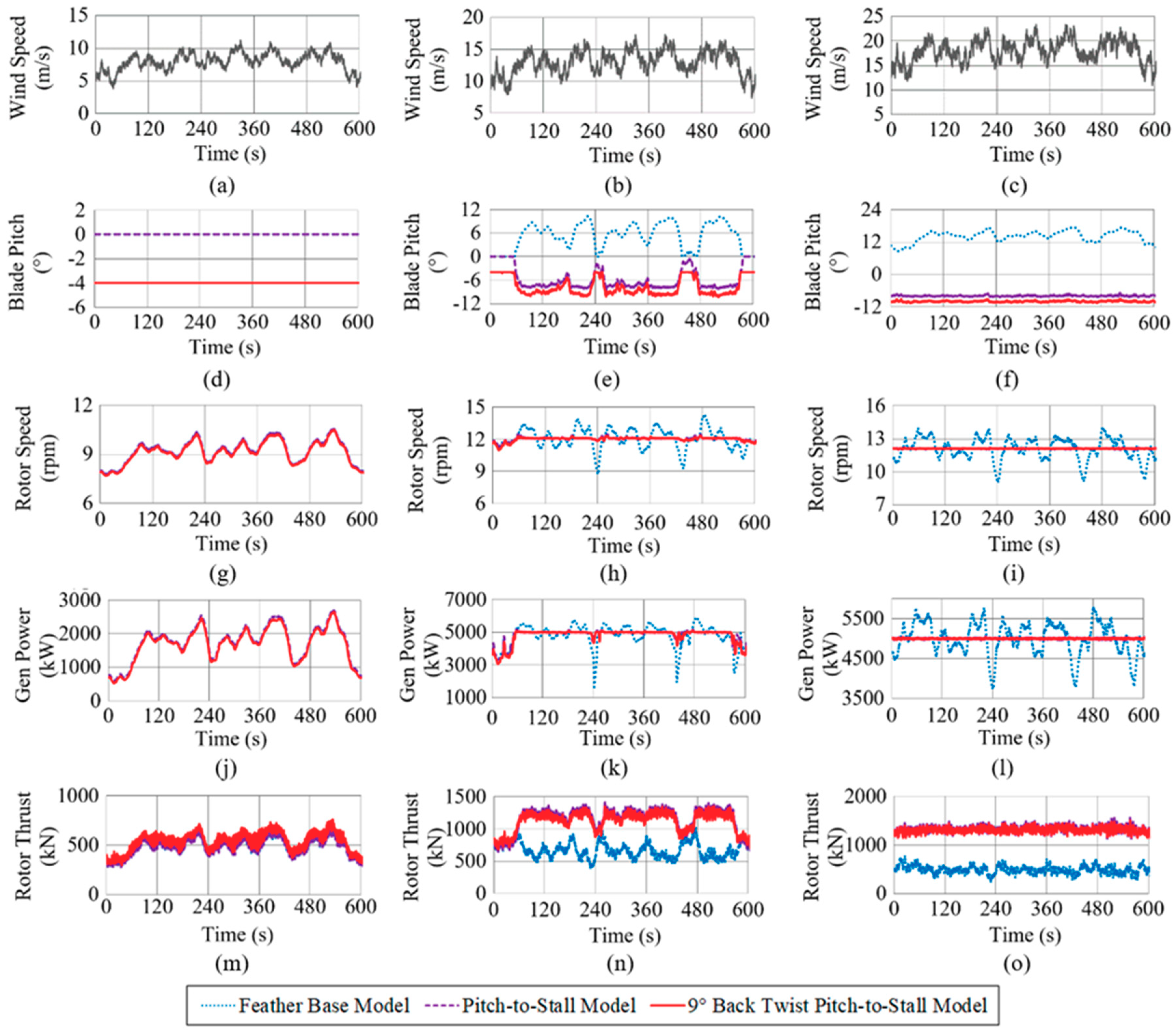
For the “Feather Base Model”, the continuous reduction in rotor thrust for above rated wind speeds (
Figure 4b) would contribute to negative damping, and hence turbine tower instabilities and oscillations, if negative damping was not avoided by reducing the natural frequency of the pitch-to-feather control system. The “Pitch-to-Stall Model” also experiences a dip in the rotor thrust seen at around 17 to 18 m/s wind speeds. This negative derivative of the thrust versus the wind speed could introduce negative damping of the platform pitch mode, as the thrust does not increase within this section because excess power is discarded to keep the rotor speed constant. Ideally a pitch-to-stall model could be designed to produce a continuous rise in rotor thrust.
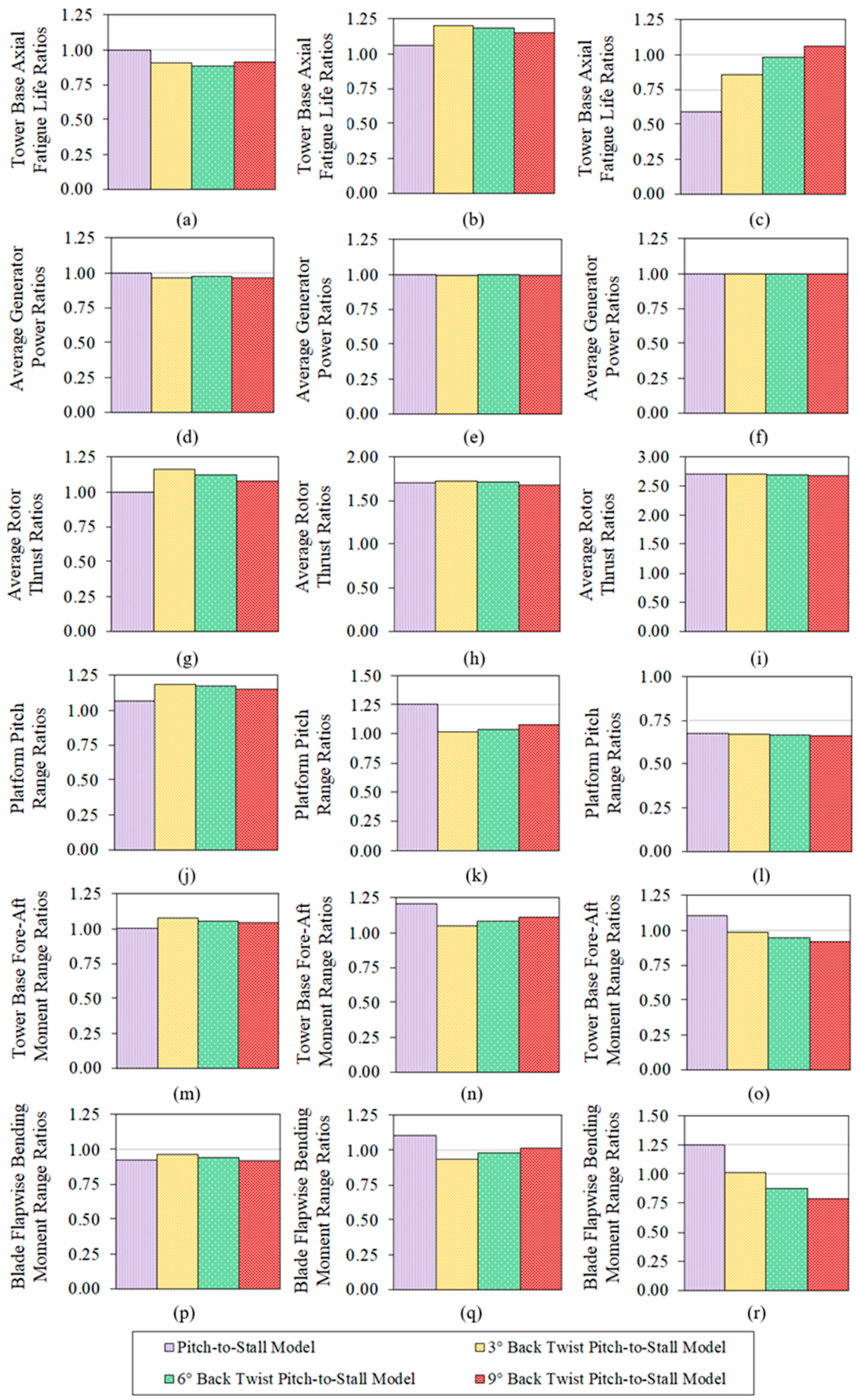
All turbine responses at 8 m/s mean turbulent winds, shown in the left hand column of
Figure 6, are not influenced by the blade pitch control method as the pitch angle is constant below 11.4 m/s. Therefore, the increase in the simulated platform pitch response in
Figure 6j and decrease in blade flapwise bending moment range in
Figure 6p experienced by the “Pitch-to-Stall Model” compared to the “Feather Base Model”, must be solely due to the changes in blade aerofoil lift coefficients. The “Back Twist Pitch-to-Stall Models” are further influenced at 8 m/s mean wind speeds by the −4° constant blade pitch angle and the specific back twist angle for each model.
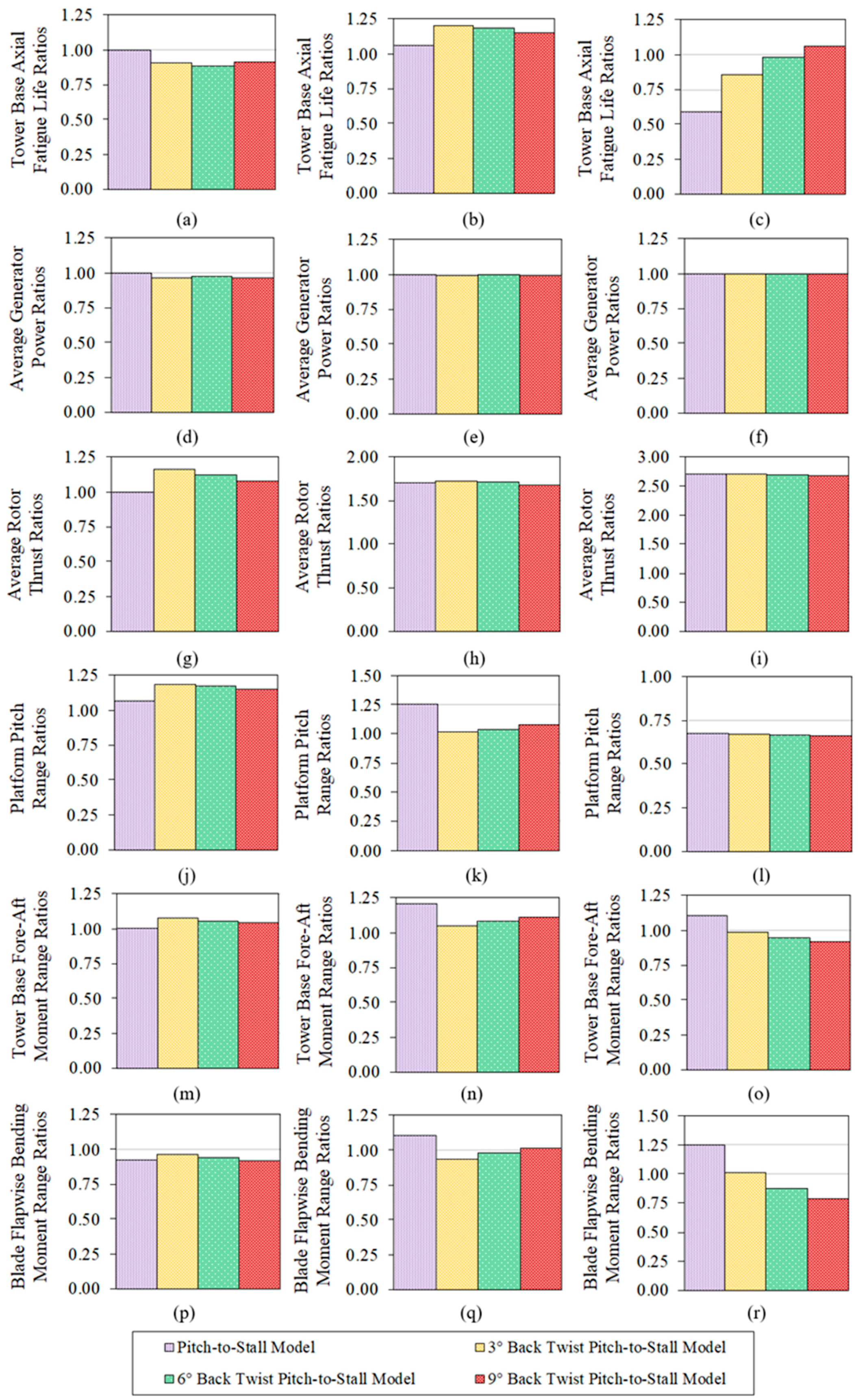
When operating in mean winds of 13 m/s, all the pitch-to-stall models experienced a beneficial increase in the tower axial fatigue life, shown in
Figure 6b, when compared to the “Feather Base Model”. This was further increased by the introduction of a back twist that extended the tower axial fatigue life by over 20% when the back twist was 3°. At this mean wind speed, a correlation between tower fore–aft moment’s range reduction (
Figure 6n) and platform pitch (
Figure 6k) and blade flapwise bending moment (
Figure 6q) reductions can be made.
At 18 m/s mean turbulent winds, the tower axial fatigue life of the “Pitch-to-Stall Model” was very low and the influence of applying and then increasing the back twist are very apparent. However, it is only with the more extreme 9° “Back Twist Pitch-to-Stall Model” that the tower axial life expectancy was exceeded, achieved by the “Feather Base Model” (
Figure 6c). The increase in tower axial fatigue life is a very desirable 5.8%. A strong correlation between the tower fore–aft base moment (
Figure 6o) and the blade flapwise bending moment (
Figure 6r) was apparent at 18 m/s mean winds, such that as the flapwise bending range reduces so does the tower base fore–aft moment, and hence the fatigue life increases. However, this does not hold true when compared against the “Feather Base Model”, as there are scenarios where the blade flapwise bending moment range is higher than that seen for feather control, but the fatigue life is still improved for the stall cases and vice versa. This could be due to the different profile shapes of the blade relative to the axial bending direction, when pitching-to-feather versus pitching-to stall. Further investigation would be necessary to explore this theory. The platform pitch range seen in
Figure 6l does not influence the tower fore–aft moment, and hence the tower fatigue life at this mean wind speed.
An account of the site wind speed probability density function for the three wind profiles was taken, such that the tower axial fatigue life was weighted depending upon its frequency of occurrence for the three mean wind speeds examined. A larger increase in tower base axial fatigue life was achieved with this weighting; with the higher 9° “Back Twist Pitch-to-Stall Model”, a 2.8% increase was achieved compared to the “Feather Base Model”. This came at the expense of a decrease in the power generation of 1%.
Pitch-to-stall control of the HAWT coupled the semi-submersible floating platform provided a more regulated energy output than was achieved with the “Feather Base Model”. The average variance for both pitch-to-stall models was 1980 kW compared to 3718 kW for the “Feather Base Model” at 13 m/s (
Figure 7k), and 101 kW compared to 1997 KW at 18 m/s (
Figure 7l). This is due to the higher pitch-to-stall control system frequency setting allowed, as negative damping is avoided by design.
5. Conclusions
In the present day, the requirement to increase the renewable portion of our energy supply worldwide is becoming more imperative each day. The offshore wind capacity has been increasing rapidly, by 87% between 2016 and 2017, in order to meet these needs [
2] and due to the limited shallow bed and low seabed slope, the industry is looking more towards floating offshore wind solutions in the future. However, turbine tower loads are often increased when a turbine is mounted on a floating platform and unless these undesirable motions can be significantly reduced, then the strength of the tower must be increased.
This research is therefore concerned with reducing excessive motions and loads associated with FOWTs and their effects on the turbine tower, while improving energy generation by pitching the turbine to stall, instead of feather, to control rotor speed which avoids the negative damping issues by design, resulting in an improvement in the regulation of the power generated. The example FOWT presented is a semi-submersible floating platform, coupled to a 5 MW HAWT, investigated through simulation.
Overall, it has been shown that the proposed approach seems to be effective in diminishing detrimental oscillations of the power output and in enhancing the tower axial fatigue life. This is achieved by variable speed, variable pitch-to-stall control, reducing the negative damping phenomenon (more regular power output), and through manipulating the blade design by the introduction of a back twist towards feather (reductions in the blade root flapwise moment leading to reductions in the tower bending moments, and hence increasing the tower axial fatigue life). This research, therefore, highlights that active variable speed and variable pitch-to-stall control has potential benefits specific to FOWTs.
More specifically, tower base axial fatigue life was increased for all pitch-to-stall scenarios, when operating in 13 m/s mean turbulent winds. The introduction of a back twist added an additional desirable increase of over 20% when the back twist was 3°. This correlated with a corresponding decrease in both platform pitch and blade flapwise bending moment ranges of motion.
At 18 m/s mean winds, the more extreme 9° “Back Twist Pitch-to-Stall Model” provided a tower base life expectancy that exceeded that achieved by the “Feather Base Model” by 5.8%. No correlation between the platform pitch response and tower base fore–aft moment was apparent at this mean wind speed. However, a strong correlation between the ranges of motion from the blade flapwise bending and the tower base moment was seen, which strongly indicates that decreasing the blade flapwise bending range decreases the tower fore–aft moment range.
Overall, the 9° “Back Twist Pitch-to-Stall Model” achieved the best tower base axial fatigue life with a 2.8% increase on the “Feather Base Model” when accounting for the relevant frequencies of occurrence of the three mean turbulent wind speed profiles, for the specific site, at the expense of a decrease in the power generation of 1%. At wind speeds above rated, the performance of pitch-to-stall in terms of rotor speed regulation and generated power output far exceeds that achieved with pitch-to-feather.
Further investigation with more variations in terms of twist initiation point, back twist angle, and constant pitch below rated angles would be recommended. Additional research on a complete back-twisted stall blade design would also be required to enable an in-depth analysis of all the blade loads as well as loads on the nacelle, gearbox, drive train, and other system components. Hence, enabling an overall assessment of the pros and cons of a back twist blade for a FOWT with active pitch-to-stall control. A study on the benefits of this blade and pitch control system on other FOWT types would also be beneficial.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}