Proposal of a Novel Semi-Submersible Floating Wind Turbine Platform Composed of Inclined Columns and Multi-Segmented Mooring Lines



Abstract
1. Introduction
2. Numerical Calculation Theory
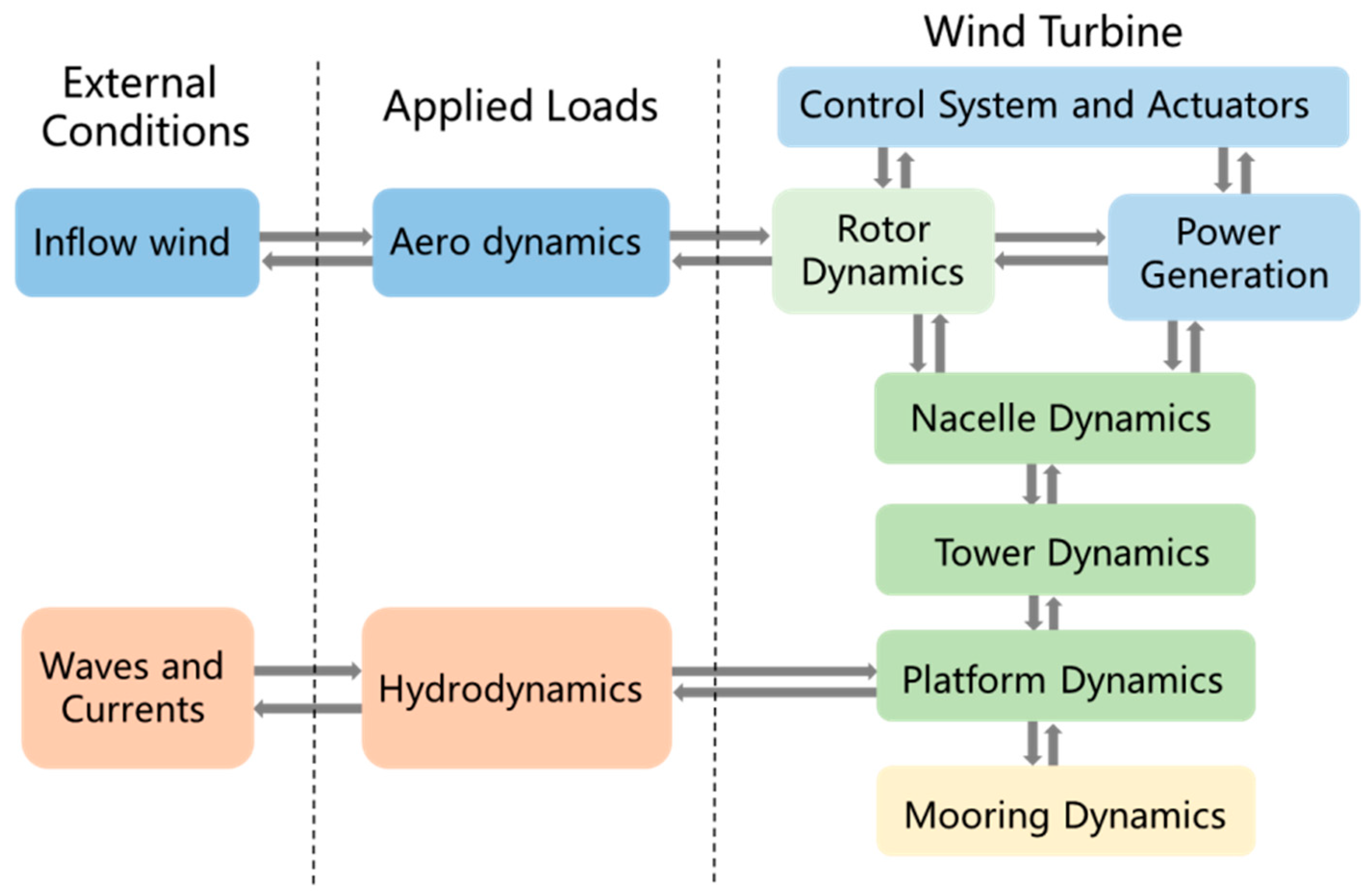
2.1. Dynamic Coupling Process
2.2. BEM Theory
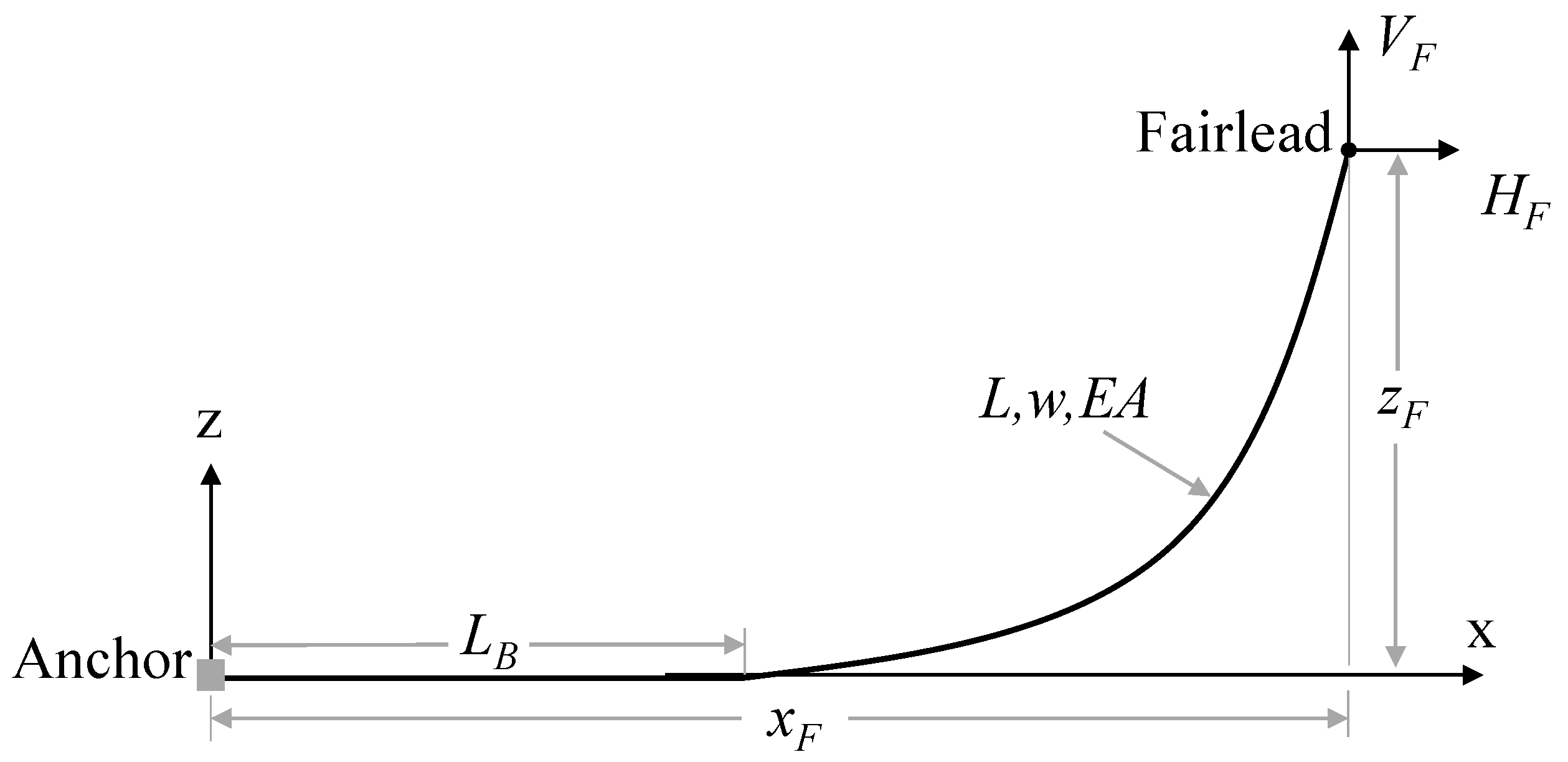
2.3. Mooring System Theory
2.4. Hydrodynamic Theory
2.5. Platform Motion Equation
3. Models of the Semi-Submersible FOWT
3.1. Wind Turbine
3.2. Floating Platform of Original OC4
3.3. Mooring System of Original OC4
3.4. Modifications of the Original OC4 Model
3.5. Load Cases
4. Results
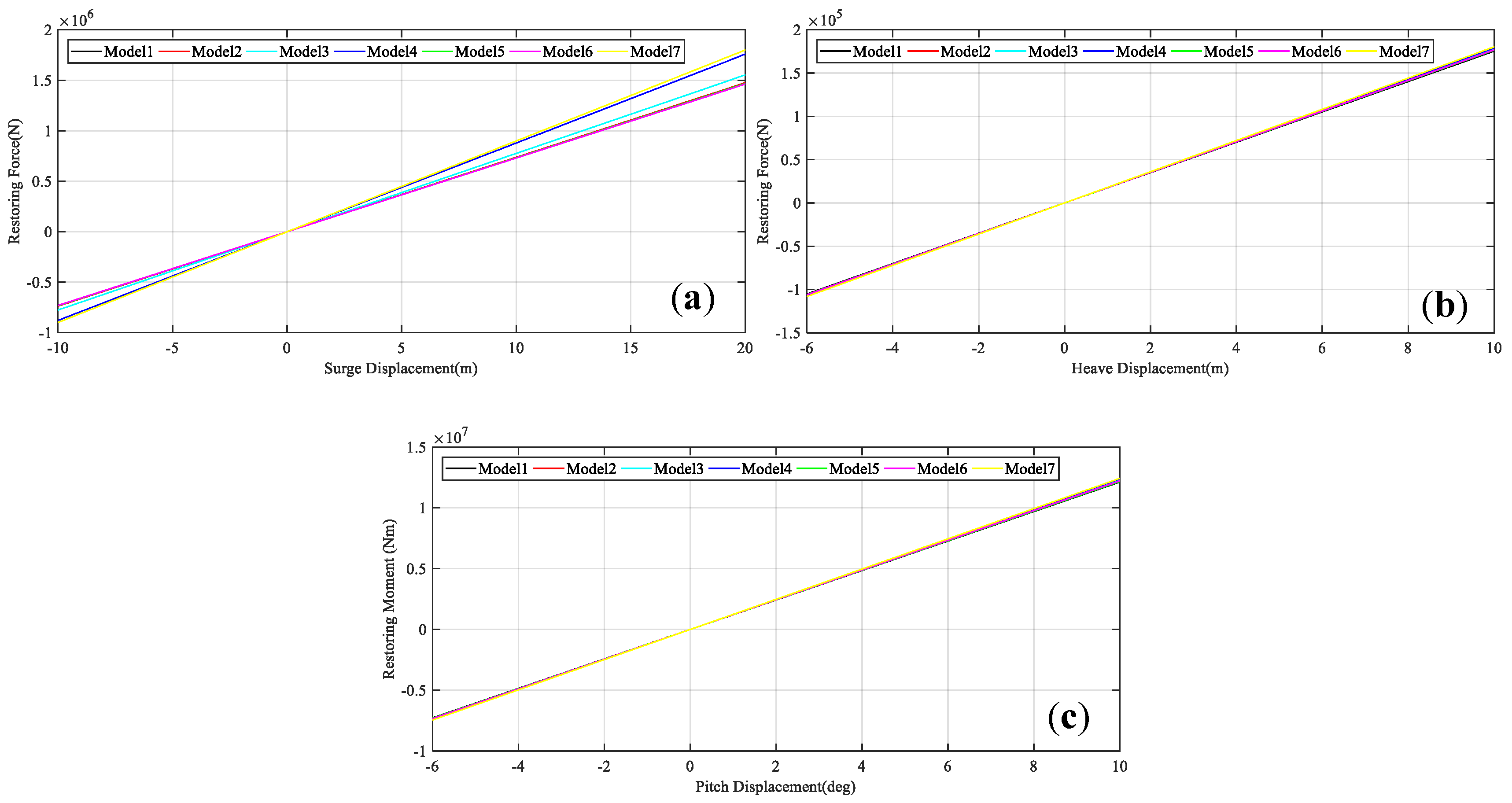
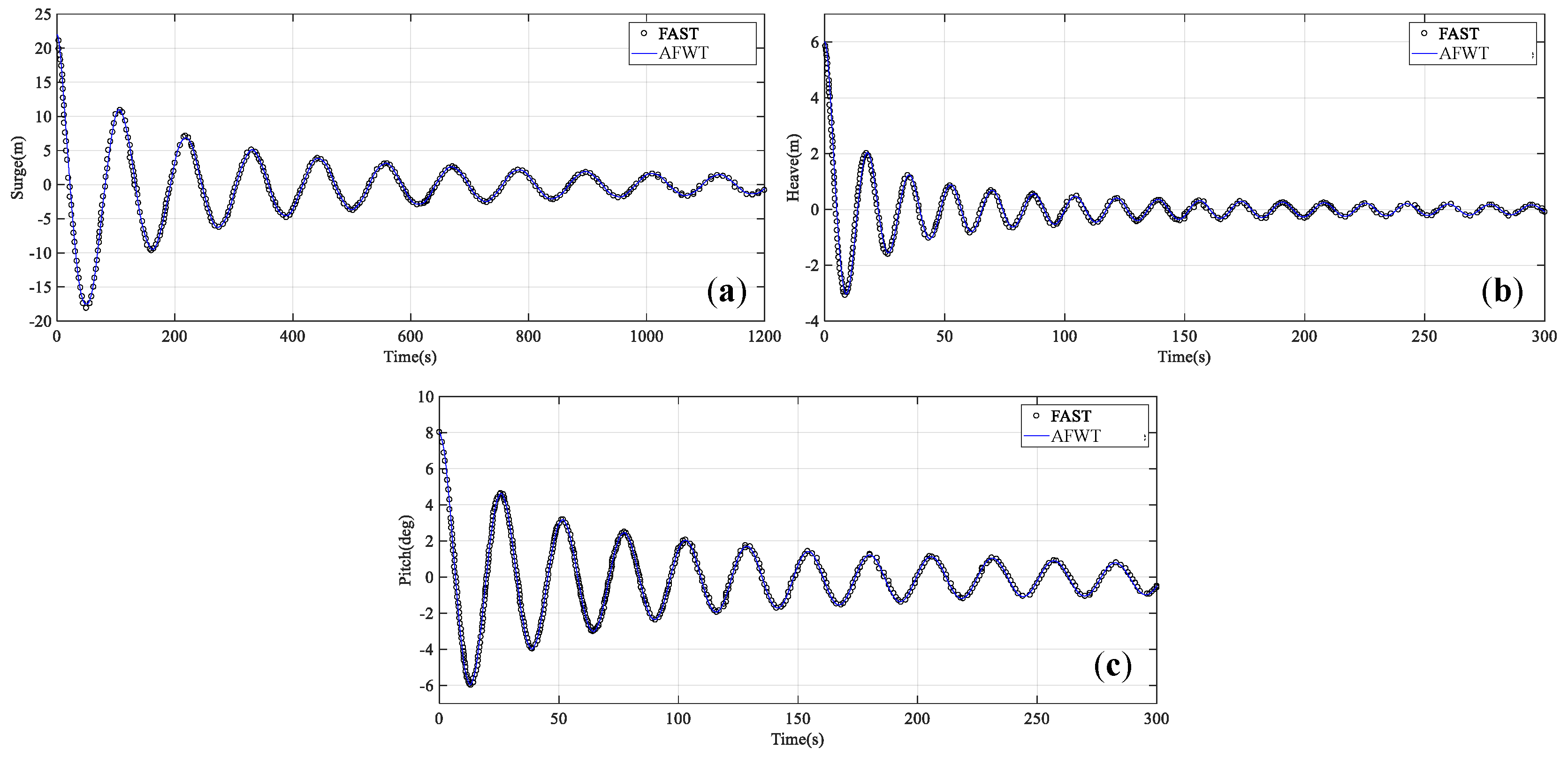
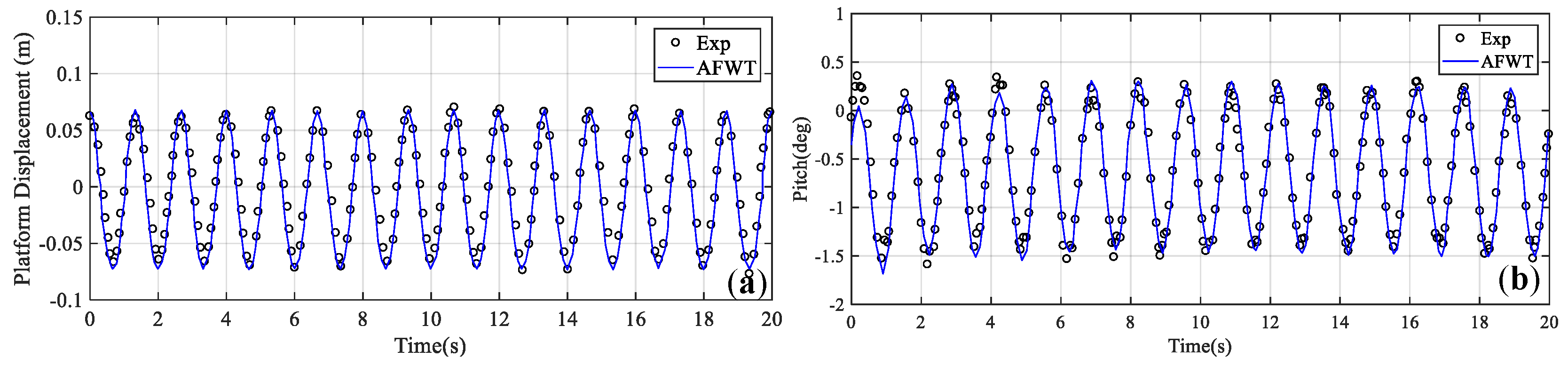
4.1. Validation of the Code
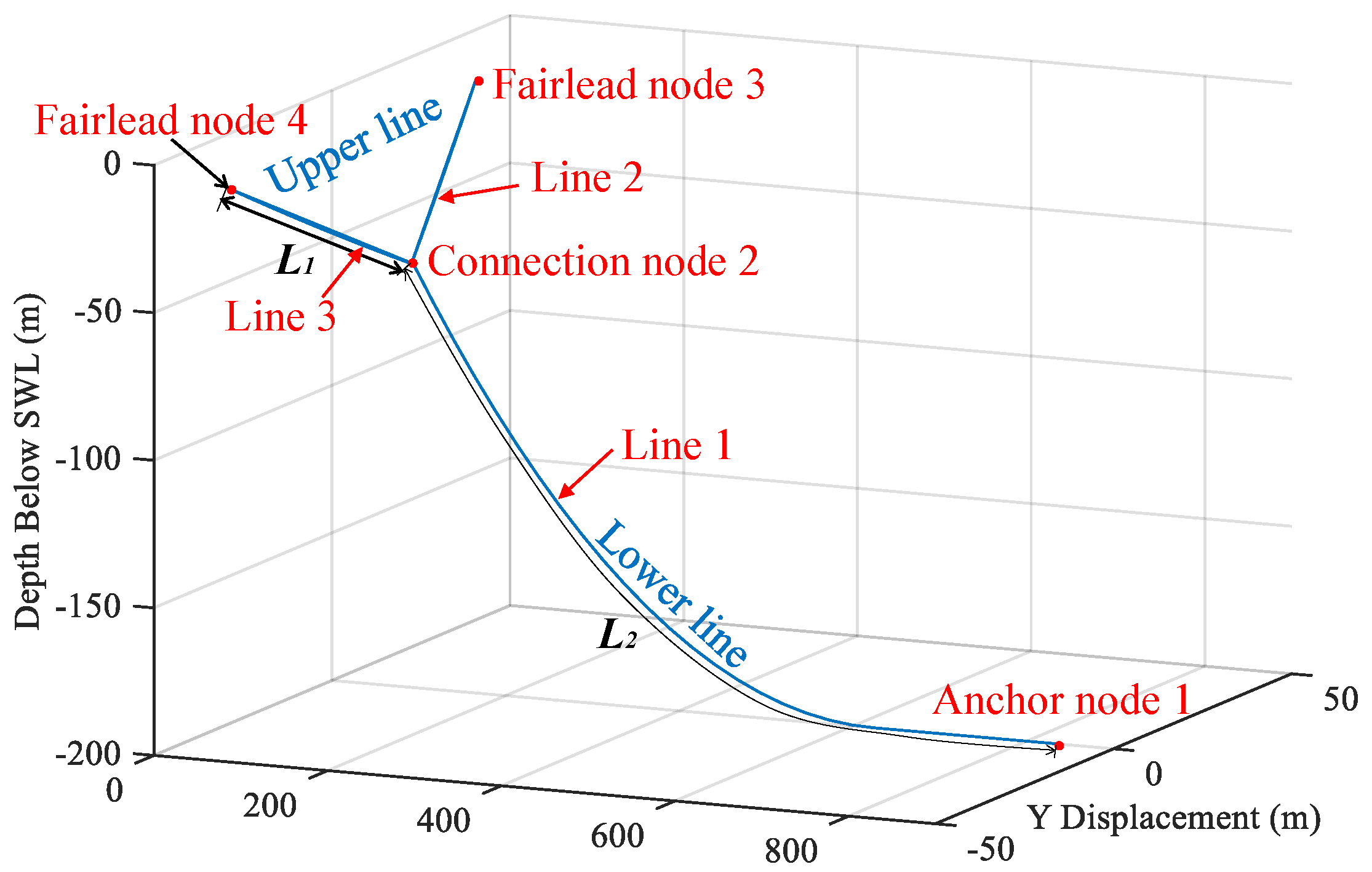
4.2. Multi-Segmented Mooring Line Models
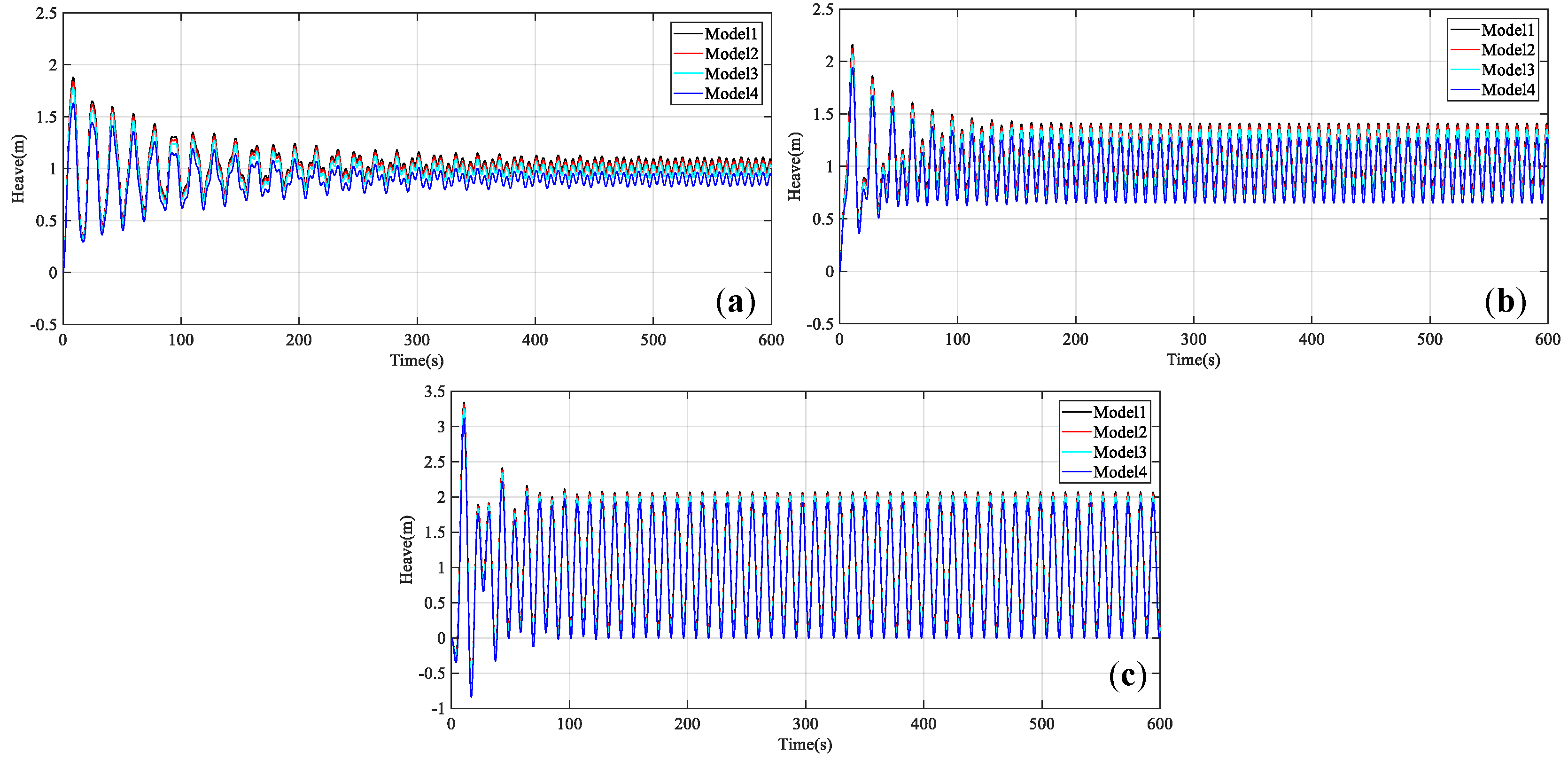
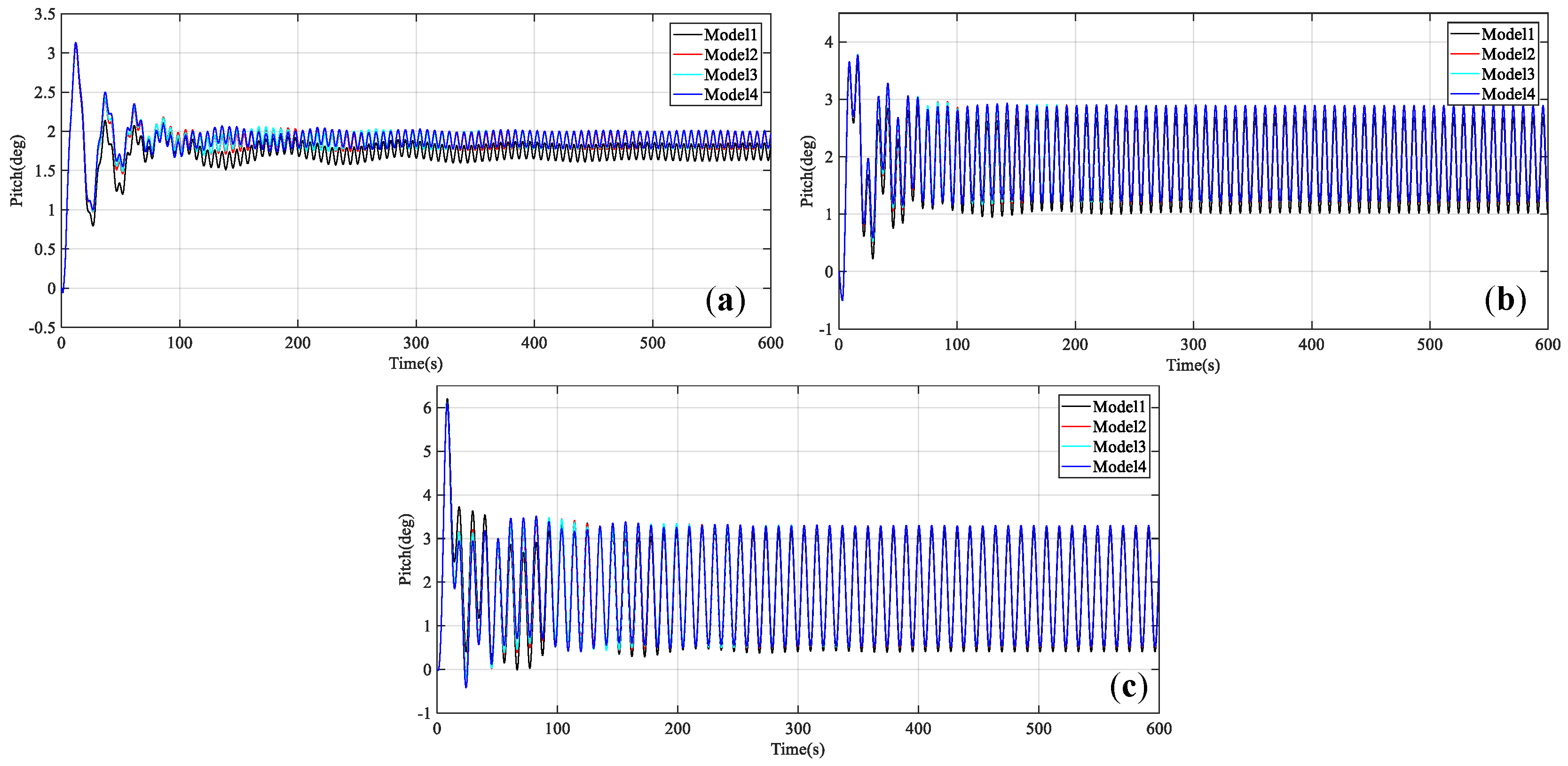
4.2.1. Regular Waves
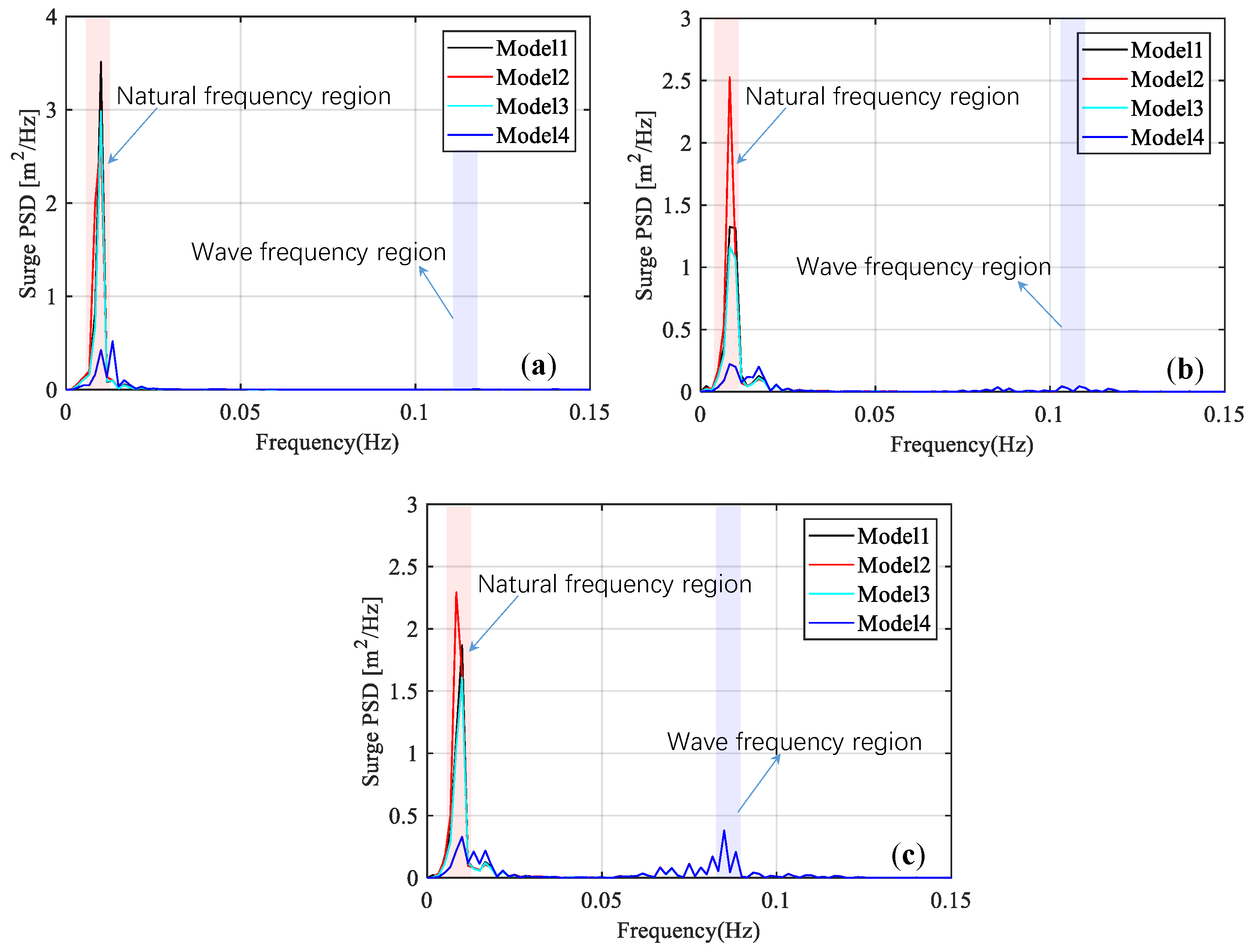
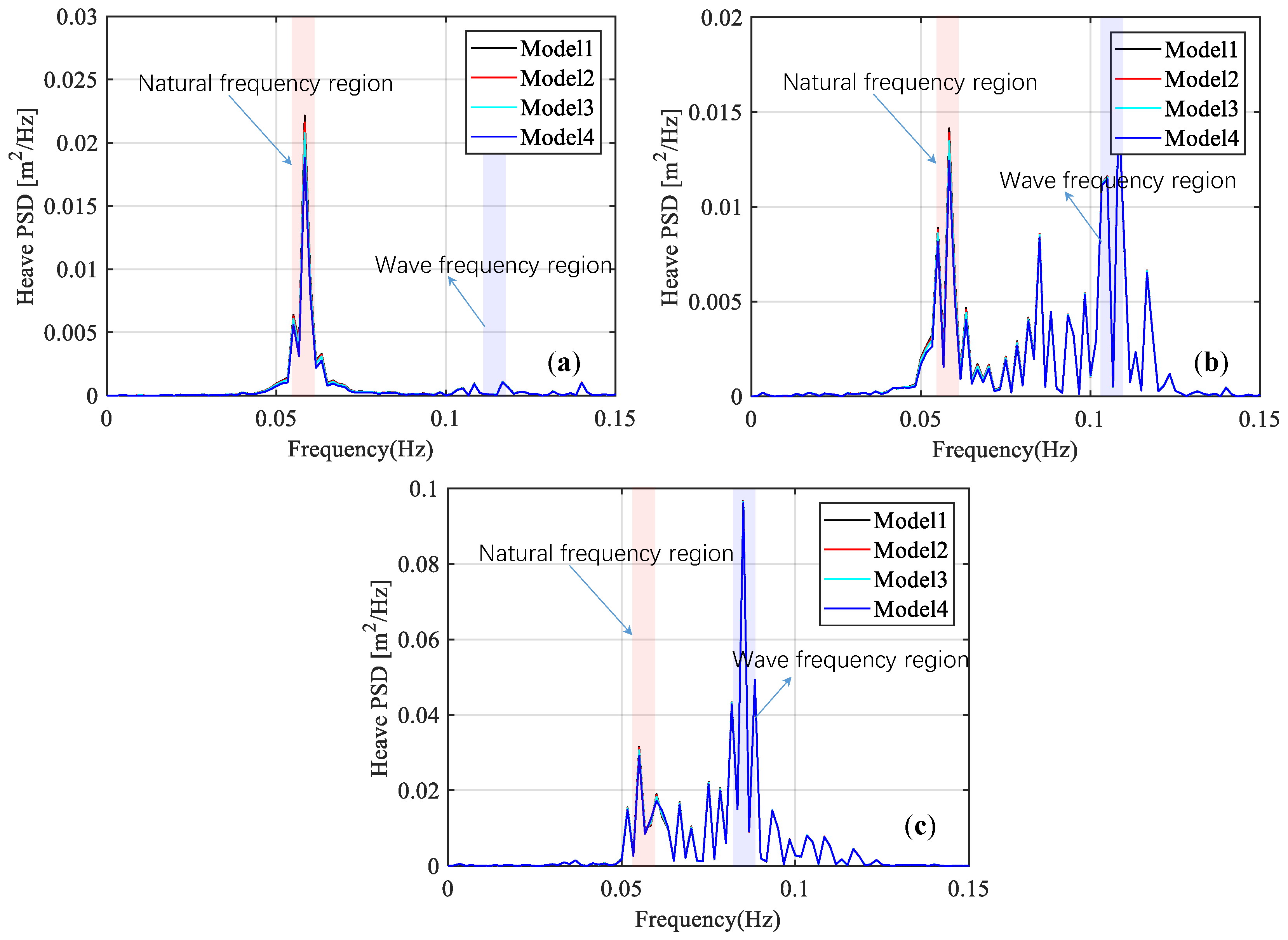
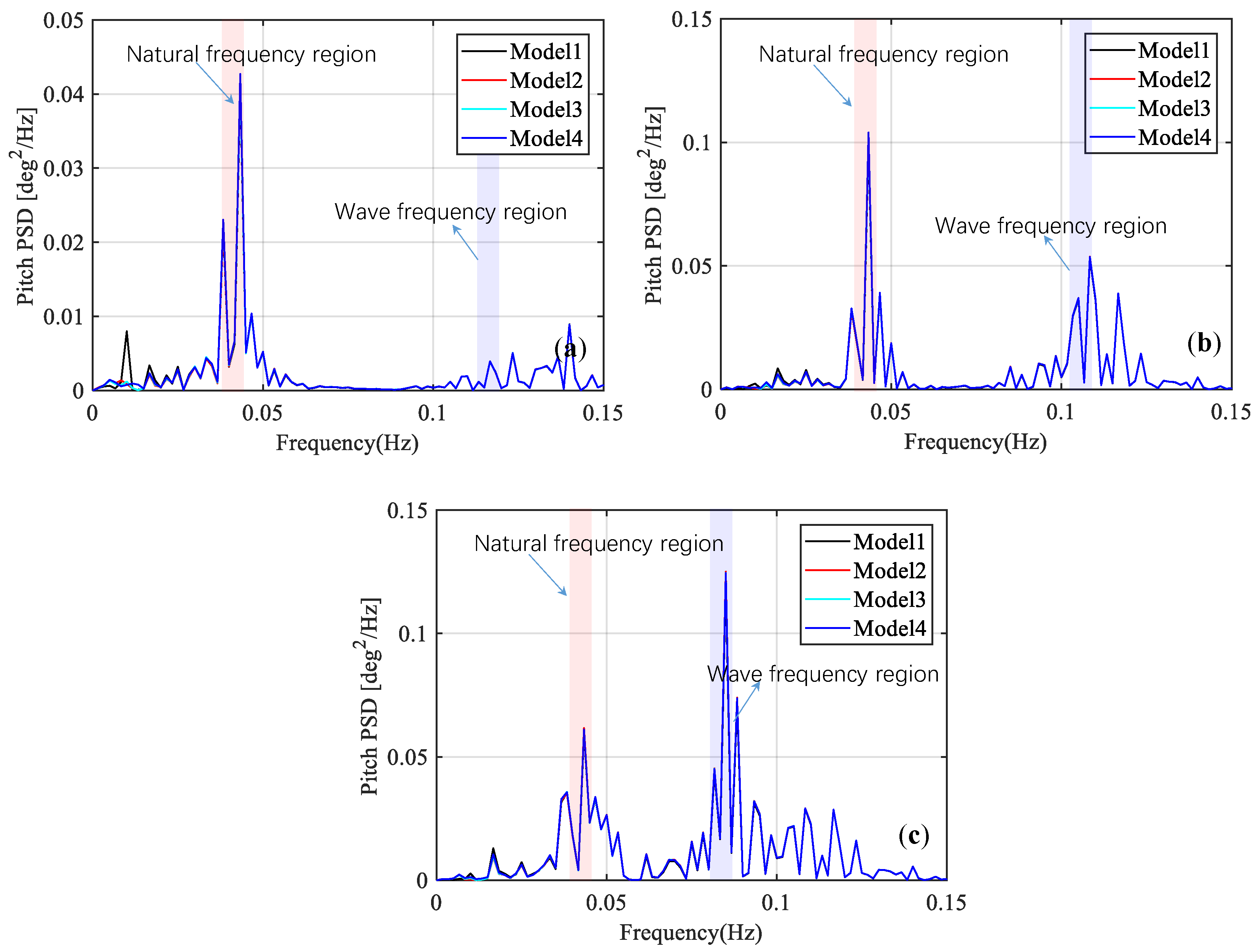
4.2.2. Irregular Wave
4.3. Inclined Upper Column Models
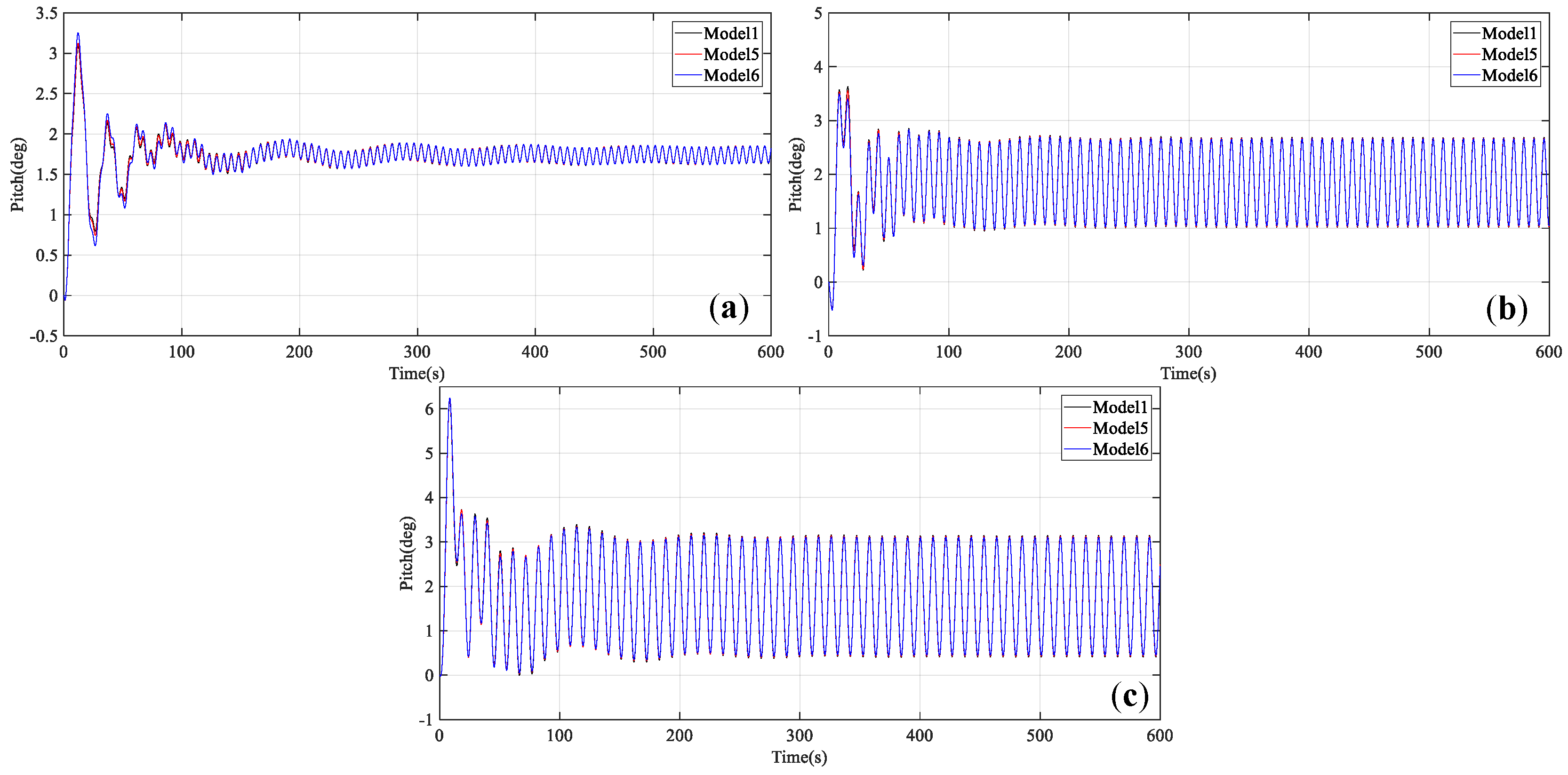
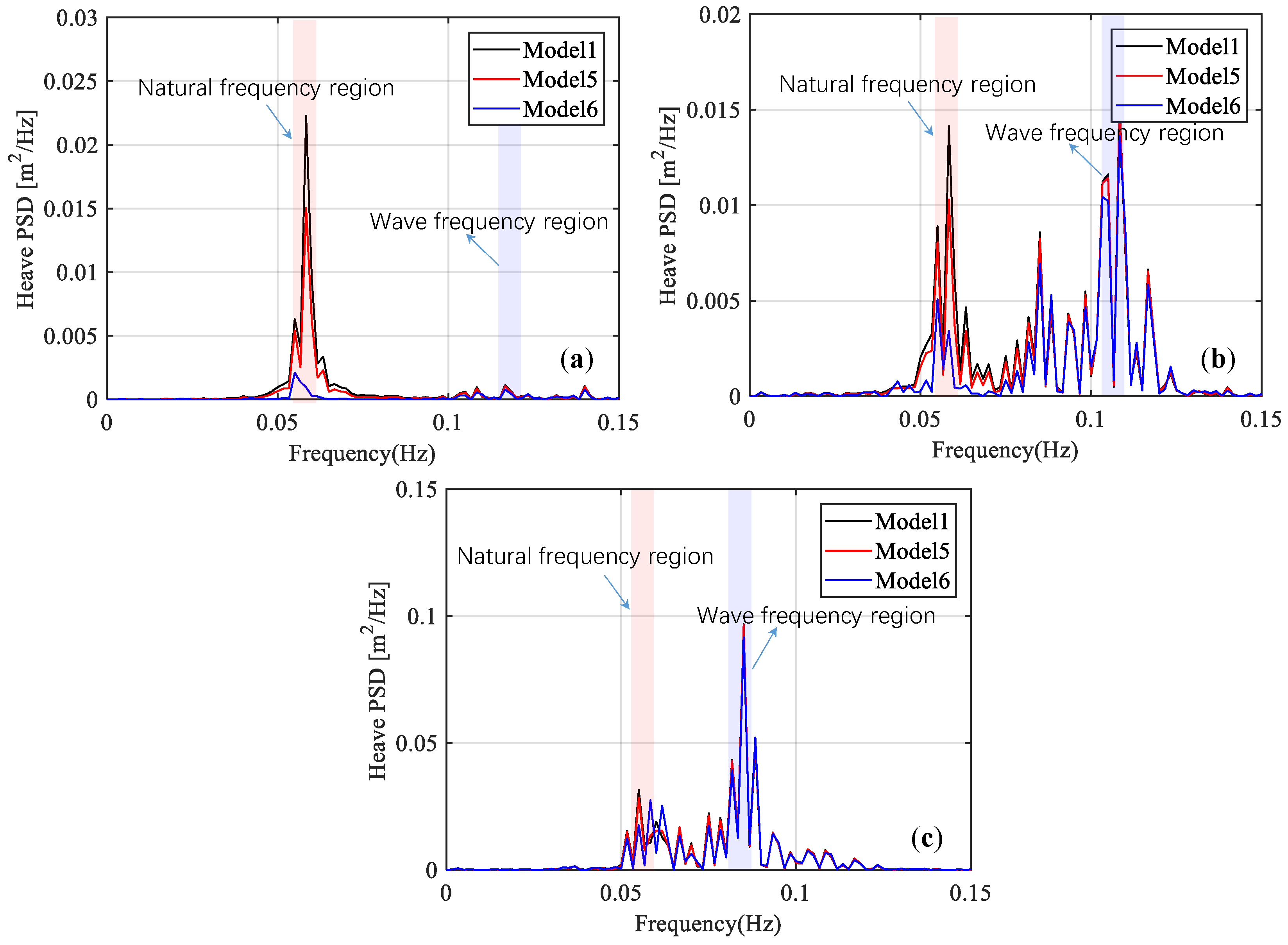
4.3.1. Regular Waves
4.3.2. Irregular Waves
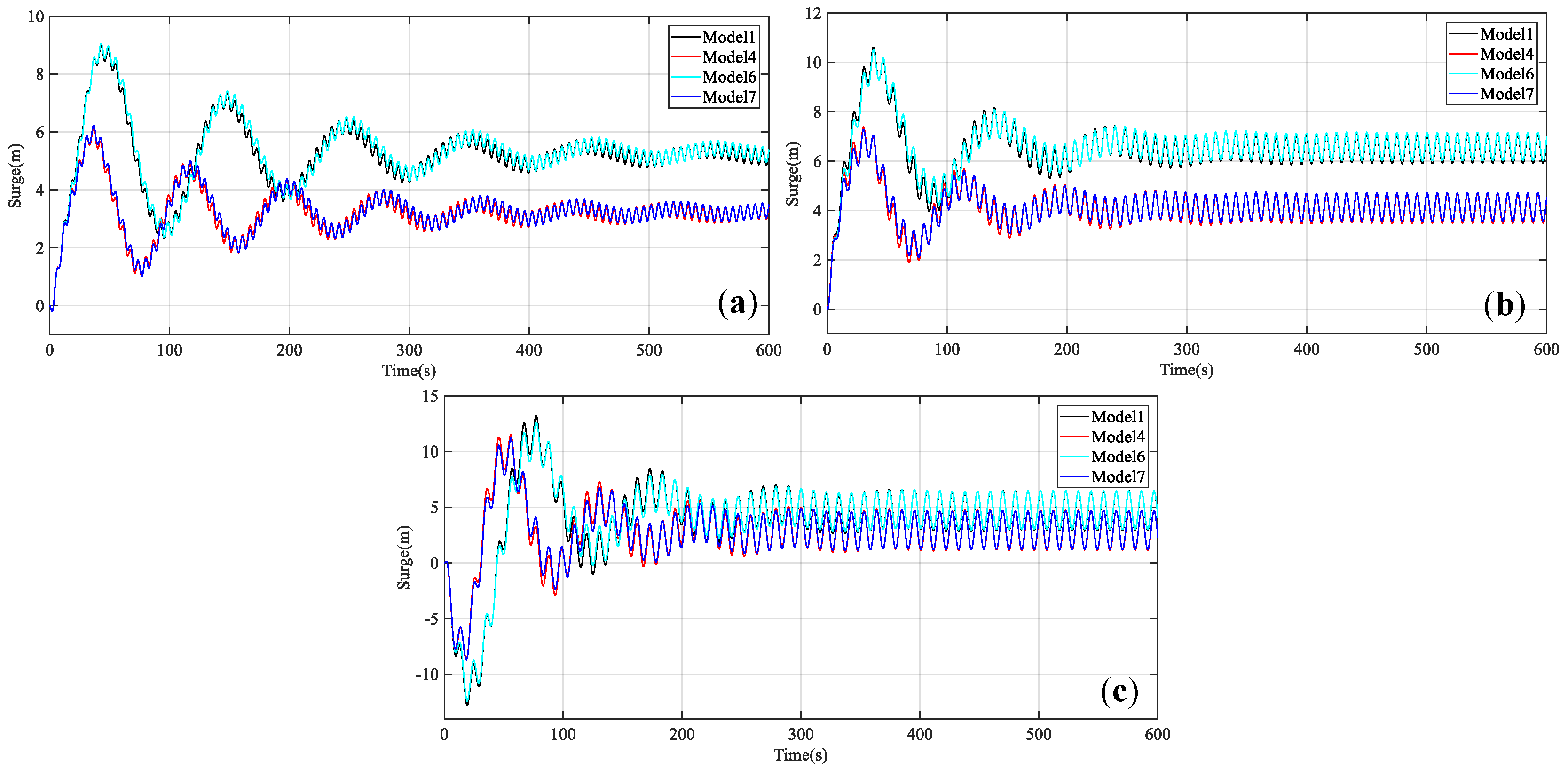
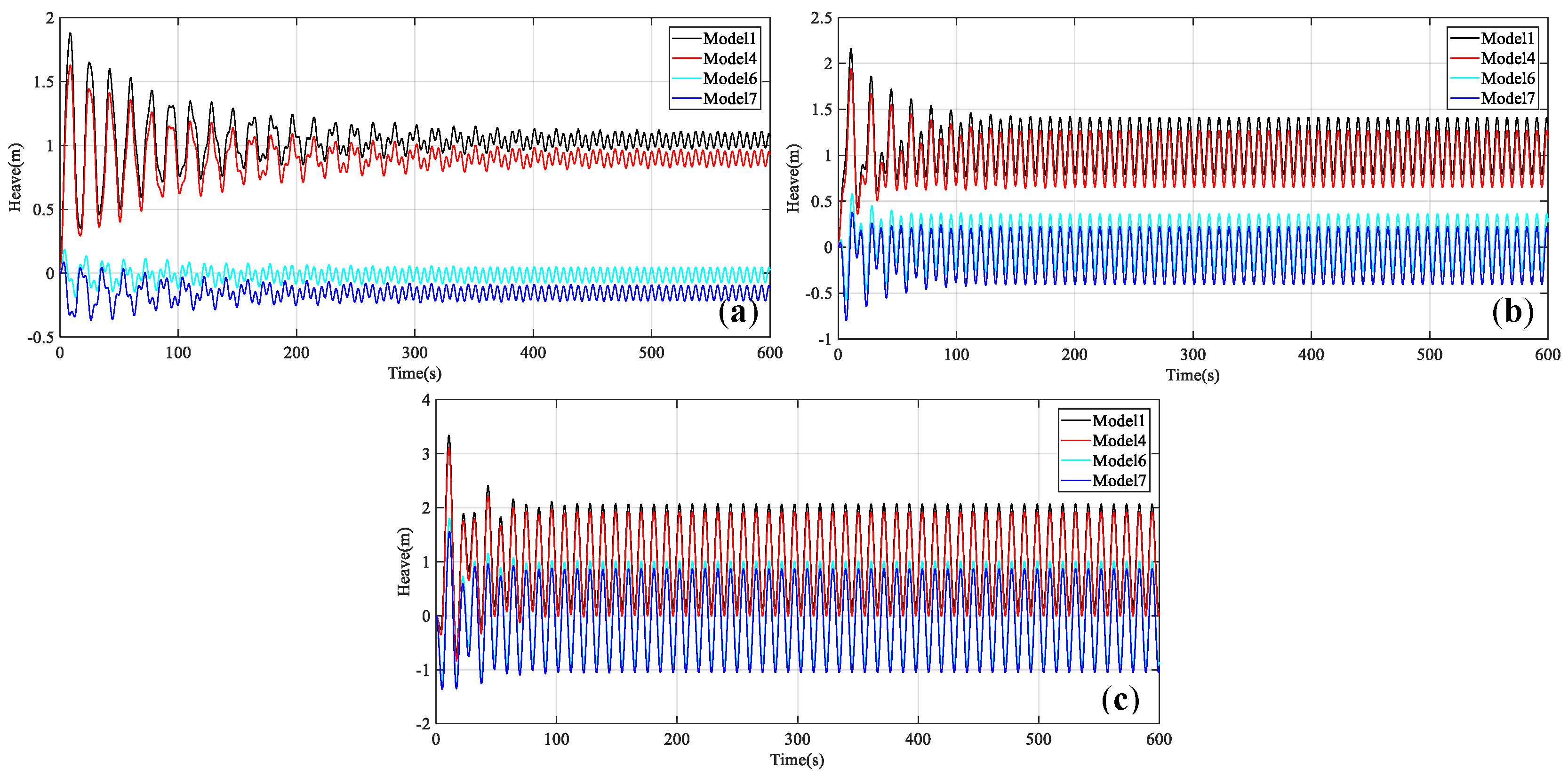
4.4. Combination of Models 4 and 6
4.4.1. Regular Waves
4.4.2. Irregular Waves
5. Conclusions
- The numerical results calculated by AFWT are basically consistent with FAST and those in experiment, which verifies the accuracy of AFWT used in this paper.
- Changing the arrangement of the mooring system can greatly reduce the surge response of the platform, although it will have little effect on the response of heave and pitch. Among Models 2, 3, and 4, the mooring system layout in Model 4 has the most remarkable effect on reducing the platform surge response by about 30% compared with the original Model 1, indicating that the shorter the upper lines are, the greater the reduction to the surge of the platform will be.
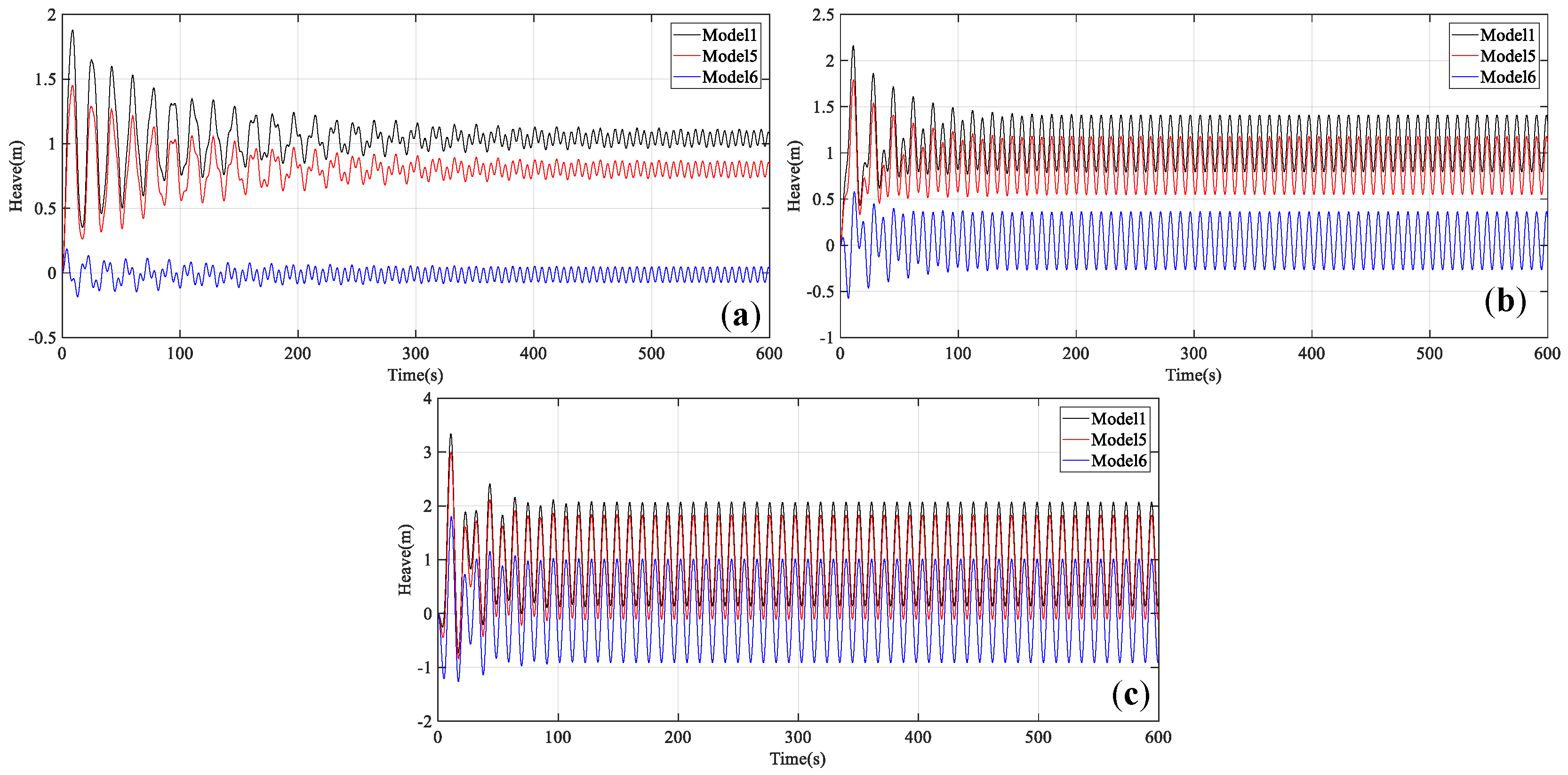
- Tilting the upper columns of the floating platform can greatly reduce the platform heave response. It is found that the heave motion of the platform will decrease as the inclined angle of the upper column increases. However, it has little effect on the responses in surge and pitch directions.
- A new model integrating the optimized multi-segmented mooring lines and the optimized inclined columns is proposed. The surge and heave motion responses of this new model are greatly declined. It should be able to increase the stability of the floating platform during operation and improve the working efficiency of the floating wind turbines.
6. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| a | Axial induction factor |
| a′ | Tangential induction factor |
| B | Number of the blades |
| Wave spectrum (P-M spectrum) | |
| c | Leaf chord length (m) |
| CB | Seabed friction coefficient |
| Cn | Coefficients for the normal force |
| Ct | Coefficients for the thrust force |
| EA | Sectional stiffness of the mooring line (kN) |
| Potential function | |
| Fwaves(t) | Incident-wave induced force (kN) |
| Fwind(t) | Wind loads acting on the blades and tower (kN) |
| Fmooring(t) | Mooring tension (kN) |
| Fvis(t) | Drag force caused by fluid viscosity (kN) |
| Fext | External force at the connection node (kN) |
| HA | Horizontal component of the effective tension at the anchor (kN) |
| HF | Horizontal component of the effective tension at the fairlead (kN) |
| L | Total unstretched mooring line length (m) |
| LB | Unstretched length of cable lying on the seabed (m) |
| s | Length from the catenary point to the anchor (m) |
| Te | Mooring line tension (kN) |
| V1 | Wind speed (m/s) |
| Vhub | Wind speed at the hub (m/s) |
| VA | Vertical component of the effective tension at the anchor (kN) |
| VF | Vertical component of the effective tension at the fairlead (kN) |
| φ | Relation flow angle (°) |
| ω | Frequency(Hz) |
| w | Mass of the mooring line per unit length (kN/m) |
| Fourier transform of a white noise time series with unit variance | |
| Wave-induced force array normalized per unit wave amplitude (kN/m) | |
| xF | Horizontal coordinate of the fairlead position relative to the anchor (m) |
| zF | Vertical coordinate of the fairlead position relative to the anchor (m) |
| AFWT | Analysis tool of floating wind turbine |
| BEM | Blade element momentum |
| CM | Center of mass |
| DOF | Degree of freedom |
| FAST | Fatigue, Aerodynamics, Structures, and Turbulence |
| FFT | Fast Fourier Transform |
| FOWT | Floating offshore wind turbine |
| HAWT | Horizontal axis wind turbine |
| LC | Load case |
| MSQS | Multi-Segmented, Quasi-Static |
| NREL | National Renewable Energy Laboratory |
| OC3 | Offshore Code Comparison Collaboration |
| OC4 | Offshore Code Comparison Collaboration Continuation |
| P-M | Pierson Moskowitz |
| PSD | Power spectral density |
| RAO | Response amplitude operator |
| SWL | Still water level |
| TLP | Tension Leg Platform |
| WAMIT | Wave Analysis Massachusetts Institute of Technology |
| WTN | Wind turbine noise |
| VAWT | Vertical axis wind turbine |
References
- Heronemus, W.E. Pollution-Free Energy from the Offshore Winds; Marine Technology Society: Washington, DC, USA, 1972. [Google Scholar]
- European Wind Energy Association. The European Offshore Wind Industry-key Trends and Statistics 1st Half 2013; European Wind Energy Association: Brussels, Belgium, 2013. [Google Scholar]
- Maine International Consulting LLC. Floating Offshore Wind Foundations: Industry Consortia and Projects in the United States, Europe and Japan; Maine International Consulting LLC: Bremen, ME, USA, 2013. [Google Scholar]
- Gille, L.A.; Marquis-Favre, C.; Morel, J. Testing of the European Union exposure-response relationships and annoyance equivalents model for annoyance due to transportation noises: The need of revised exposure-response relationships and annoyance equivalents model. Environ. Int. 2016, 94, 83–94. [Google Scholar] [CrossRef]
- Janssen, S.A.; Vos, H.; Eisses, A.R.; Pedersen, E. A comparison between exposure-response relationships for wind turbine annoyance and annoyance due to other noise sources. J. Acoust. Soc. Am. 2011, 130, 3743–3756. [Google Scholar] [CrossRef] [PubMed]
- Takayuki, K.; Takashi, Y.; Sonoko, K.; Shinichi, S.; Hideki, T. Exposure-response relationship of wind turbine noise with self-reported symptoms of sleep and health problems: A nationwide socioacoustic survey in Japan. Noise Health 2016, 18, 53–61. [Google Scholar]
- Fredianelli, L.; Gallo, P.; Licitra, G.; Carpita, S. Analytical assessment of wind turbine noise impact at receiver by means of residual noise determination without the wind farm shutdown. Noise Control Eng. J. 2017, 417–433. [Google Scholar] [CrossRef]
- Fredianelli, L.; Carpita, S.; Licitra, G. A procedure for deriving wind turbine noise limits by taking into account annoyance. Sci. Total Environ. 2019, 648, 728–736. [Google Scholar] [CrossRef] [PubMed]
- Musial, W.; Butterfield, S.; Boone, A. Feasibility of Floating Platform Systems for Wind Turbines. In Proceedings of the 42nd AIAA Aerospace Sciences Meeting and Exhibit, Reno Nevada, NV, USA, 5–7 January 2004. [Google Scholar]
- Karimirad, M.; Moan, T. Feasibility of the Application of a Spar-type Wind Turbine at a Moderate Water Depth. Energy Procedia 2012, 24, 340–350. [Google Scholar] [CrossRef]
- Ahn, H.J.; Shin, H. Model test and numerical simulation of OC3 spar type floating offshore wind turbine. Int. J. Naval Arch. Ocean Eng. 2019, 11, 1–10. [Google Scholar] [CrossRef]
- Tomasicchio, G.R.; D’Alessandro, F.; Avossa, A.M.; Riefolo, L.; Musci, E.; Ricciardelli, F.; Vicinanza, D. Experimental modelling of the dynamic behaviour of a spar buoy wind turbine. Renew. Energy 2018, 127, 412–432. [Google Scholar] [CrossRef]
- Markus, L.; De-Prada-Gil, M.; Molins, C. The influence of different wind and wave conditions on the energy yield and downtime of a Spar-buoy floating wind turbine. Renew. Energy 2019, 136, 1–14. [Google Scholar]
- Ma, Y.; Hu, Z.Q.; Xiao, L.F. Wind-wave induced dynamic response analysis for motions and mooring loads of a spar-type offshore floating wind turbine. J. Hydrodyn. 2015, 26, 865–874. [Google Scholar] [CrossRef]
- Jeon, S.H.; Cho, Y.U.; Seo, M.W.; Cho, J.R.; Jeong, W.B. Dynamic response of floating substructure of spar-type offshore wind turbine with catenary mooring cables. Ocean Eng. 2013, 72, 356–364. [Google Scholar] [CrossRef]
- Si, Y.L.; Hamid, R.K.; Gao, H.J. Modelling and optimization of a passive structural control design for a spar-type floating wind turbine. Eng. Struct. 2014, 69, 168–182. [Google Scholar] [CrossRef]
- Ye, K.; Ji, J.C. Current, wave, wind and interaction induced dynamic response of a 5 MW spar-type offshore direct-drive wind turbine. Eng. Struct. 2019, 178, 395–409. [Google Scholar] [CrossRef]
- Hong, S.; Lee, I.; Park, S.H.; Lee, C.; Chun, H.H.; Lim, H.C. An experimental study of the effect of mooring systems on the dynamics of a SPAR buoy-type floating offshore wind turbine. Int. J. Naval Arch. Ocean Eng. 2015, 7, 559–579. [Google Scholar] [CrossRef][Green Version]
- Subbulakshmi, A.; Sundaravadivelu, R. Heave damping of spar platform for offshore wind turbine with heave plate. Ocean Eng. 2016, 121, 24–36. [Google Scholar] [CrossRef]
- Duan, F.; Hu, Z.Q.; Niedzwecki, J.M. Model test investigation of a spar floating wind turbine. Mar. Struct. 2016, 49, 76–96. [Google Scholar] [CrossRef]
- American Petroleum Institute. Recommended Practices for Planning, Designing, and Constructing Tension Leg Platforms; American Petroleum Institute: Washington, DC, USA, 1997. [Google Scholar]
- Vita, L.; Ramachandran, G.K.V.; Krieger, A.; Kvittem, M.I.; Merino, D.; Cross-Whiter, J.; Ackers, B.B. Comparison of Numerical Models and Verification Against Experimental Data, Using PelaStar TLP Concept. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Oguz, E.; Clelland, D.; Day, A.H.; Incecik, A.; López, J.A.; Sánchez, G.; Almeria, G.G. Experimental and numerical analysis of a TLP floating offshore wind turbine. Ocean Eng. 2018, 147, 591–605. [Google Scholar] [CrossRef]
- Bulder, B.H.; Van, H.; Henderson, A.; Huijsmans, R.H.M.; Pierik, J.T.G.; Snijders, E.J.B.; Wijnants, G.H.; Wolf, M.J. Studie Naar Haalbaarheid Van en Randvoorwaarden Voor Drijvende Offshore Windturbines; Drijfwind Project Report; TNO: Delft, The Netherlands, 2002. [Google Scholar]
- Robertson, A.N.; Jonkman, J.M. Loads analysis of several offshore floating wind turbine concepts. In Proceedings of the 21st International Offshore and Polar Engineering Conference, Maui, HI, USA, 19–24 June 2011; pp. 443–450. [Google Scholar]
- Borg, M.; Wang, K.; Collu, M.; Moan, T. A comparison of two coupled model of dynamics for offshore floating vertical axis wind turbines. In Proceedings of the ASME 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Beyer, F.; Choisnet, T.; Kretschmer, M.; Cheng, P.W. Coupled MBS-CFD Simulation of the Ideol Floating Offshore Wind Turbine Foundation Compared to Wave Tank Model Test Data. In Proceedings of the 25th International Ocean and Polar Engineering Conference, Kona, Big Island, HI, USA, 21–26 June 2015. [Google Scholar]
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4 NREL/TP-5000–60601; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2014.
- Paquette, J.; Barone, M.; Paquette, J.; Barone, M. Innovative offshore vertical-axis wind turbine rotor project. In Proceedings of the EWEA 2012 Annual Event, Copenhagen, Denmark, 16–19 April 2012. [Google Scholar]
- Jonkman, J.M. Influence of control on the pitch damping of a floating wind turbine. In Proceedings of the 2008 ASME Wind Energy Symposium, Reno, NV, USA, 7–10 January 2008. [Google Scholar]
- Luan, C.; Gao, Z.; Moan, T. Modelling and analysis of a semi-submersible wind turbine with a central tower with emphasis on the brace system. In Proceedings of the 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013. [Google Scholar]
- Jonkman, J.M.; Buhl, M.L., Jr. Loads Analysis of a Floating Offshore Wind Turbine Using Fully Coupled Simulation. In Proceedings of the Wind Power 2007 Conference & Exhibition, Los Angeles, CA, USA, 3–6 June 2007. [Google Scholar]
- Barooni, M.; Ali, N.A.; Ashuri, T. An open-source comprehensive numerical model for dynamic response and loads analysis of floating offshore wind turbines. Energy 2018, 154, 442–454. [Google Scholar] [CrossRef]
- Viselli, A.M.; Goupee, A.J.; Dagher, H.J. Model test of a 1:8-scale floating wind turbine offshore in the gulf of maine. J. Offsh. Mech. Arctic Eng. 2015, 137, 041901. [Google Scholar] [CrossRef]
- Jain, A.; Robertson, A.N.; Jonkman, J.M.; Goupee, A.J.; Swift, R.W. FAST code verification of scaling laws for DeepCwind floating wind system tests. In Proceedings of the 22nd International Offshore and Polar Engineering Conference, Rhodes, Greece, 17–22 June 2012; pp. 355–365. [Google Scholar]
- Michailides, C.; Gao, Z.; Moan, T. Experimental study of the functionality of a semisubmersible wind turbine combined with flap-type Wave Energy Converters. Renew. Energy 2016, 93, 675–690. [Google Scholar] [CrossRef]
- Li, L.; Gao, Y.; Hu, Z.Q.; Yuan, Z.M.; Sandy, D.; Li, H.R. Model test research of a semisubmersible floating wind turbine with an improved deficient thrust force correction approach. Renew. Energy 2018, 119, 95–105. [Google Scholar] [CrossRef]
- Zambrano, T.; Cready, T.M.; Kiceniuk, T. Dynamic modeling of deepwater offshore wind turbine structures in Gulf of Mexico storm conditions. In Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 4–9 June 2006; pp. 1–6. [Google Scholar]
- Shimada, K.; Miyakawa, M.; Ishihara, T. A Study on a Semi-Submersible Floating Offshore Wind Energy Conversion System. In Proceedings of the 16th International Offshore and Polar Engineering Conference, San Francisco, CA, USA, 28 May–2 June 2006; pp. 348–355. [Google Scholar]
- Robertson, A.N.; Jonkman, J.M.; Masciola, M.D.; Molta, P.; Coulling, A.J.; Goupee, A.J. Summary of Conclusions and Recommendations Drawn from the DeepCWind Scaled Floating Offshore Wind System Test Campaign. In Proceedings of the ASME 2013 International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 9–14 June 2013. [Google Scholar]
- Coulling, A.J.; Goupee, A.J.; Robertson, A.N.; Jonkman, J.M.; Dagher, H.J. Validation of a FAST semi-submersible floating wind turbine numerical model with DeepCwind test data. Renew. Sustain. Energy 2013, 3. [Google Scholar] [CrossRef]
- Hall, M.; Goupee, A. Validation of a lumped-mass mooring line model with DeepCwind semisubmersible model test data. Ocean Eng. 2015, 590–603. [Google Scholar] [CrossRef]
- Masciola, M.; Robertson, A.; Jonkman, J.; Coulling, A.; Goupee, A. Assessment of the Importance of Mooring Dynamics on the Global Response of the DeepCwind Floating Semisubmersible Offshore Wind Turbine. In Proceedings of the Twenty-third International Offshore and Polar Engineering Conference, Anchorage, AL, USA, 30 June–5 July 2013. [Google Scholar]
- Roddier, D.; Cermelli, C.; Weinstein, A. WindFloat: A Floating Foundation for Offshore Wind Turbines-Part II: Hydrodynamic Analysis. In Proceedings of the 28th International Conference on Ocean, Offshore Mechanics and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009; pp. 1–9. [Google Scholar]
- Huijs, F.; Bruijn, R.D.; Savenije, F. Concept design verification of a semi-submersible floating wind turbine using coupled simulations. Energy Procedia 2014, 53, 2–12. [Google Scholar] [CrossRef]
- Zheng, X.Y.; Lei, Y. Stochastic Response Analysis for a Floating Offshore Wind Turbine Integrated with a Steel Fish Farming Cage. Appl. Sci. 2018, 8, 1229. [Google Scholar] [CrossRef]
- Jonkman, J.M. Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine; Technical Report NREL/TP-500–41958; The National Renewable Energy Laboratory: Lakewood, CO, USA, 2007.
- Ormberg, H.; Bachynski, E.E. Global analysis of floating wind turbines: Code development, model sensitivity and benchmark study. In Proceedings of the 22nd International Ocean and Polar Engineering Conference, Rhodes, Greece, 17–22 June 2012. [Google Scholar]
- Karimirad, M. Stochastic Dynamic Response Analysis of Spar-Type Wind Turbines with Catenary or Taut Mooring Systems. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2011. [Google Scholar]
- Goupee, A.J.; Fowler, M.J.; Kimball, R.W.; Helder, J.; Ridder, E.J. Additional wind/wave basin testing of the DeepCwind semi-submersible with a performance-matched wind turbine. In Proceedings of the ASME 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Skaare, B.; Hanson, T.D.; Nielsen, F.G.; Yttervik, R.; Hansen, A.M.; Thomsen, K.; Larsen, T.J. Integrated dynamic analysis of floating offshore wind turbines. In Proceedings of the European Wind Energy Conference, Milan, Italy, 7–10 May 2007; pp. 7–10. [Google Scholar]
- Moriarty, P.J.; Hansen, C.A. AeroDyn Theory Manual; Technical Report; National Renewable Energy Laboratory: Golden, CO, USA, 2005.
- Jonkman, J.M.; Hayman, G.J.; Jonlman, B.J.; Damiani, R.R.; Murray, R.E. AeroDyn v15 User’s Guide and Theory Manual; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2016.
- Masciola, M.; Jonkman, J.; Robertson, A. Implementation of a Multi-segmented, Quasi-Static cable model. In Proceedings of the 23rd International Ocean and Polar Engineering Conference, Anchorage, AL, USA, 30 June–5 July 2013. [Google Scholar]
- Masciola, M.; Jonkman, J. Instructional and Theory Guide to the Mooring Analysis Program Phase I: The Multi–Segmented Quasi–Static Model; NREL Technical Report; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2013.
- Jonkman, J.M.; Robertson, A.N.; Hayman, G.J. HydroDyn User’s Guide and Theory Manual; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2015.
- Wang, H.; Hu, Z.Q.; Meng, X.Y. Dynamic Performance Investigation of a Spar-Type Floating Wind Turbine Under Different Sea Conditions. China Ocean Eng. 2018, 32, 256–265. [Google Scholar] [CrossRef]
- Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Technical Report NREL/TP 500–38060; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2009.
- Kim, H.C.; Kim, M.H. Comparison of simulated platform dynamics in steady/dynamic winds and irregular waves for OC4 semi-submersible 5MW wind-turbine against DeepCwind model-test results. Ocean Syst. Eng. 2016, 1, 1–21. [Google Scholar] [CrossRef]
- Goupee, A.; Koo, B.; Lambrakos, K.; Kimball, R. Model tests for three floating wind turbine concepts. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April–3 May 2012. [Google Scholar]
- Palm, J.; Moura Paredes, G.; Eskilsson, C.; Taveira Pinto, F.; Bergdahl, L. Simulation of mooring cable dynamics using a discontinuous galerkin method. In Proceedings of the V International Conference on Computational Methods in Marine Engineering, Hamburg, Germany, 29–31 May 2013. [Google Scholar]
- Liu, Y.Y.; Yoshida, S.; Yamamoto, H.; Toyofuku, A.; He, G.H.; Yang, S.H. Response Characteristics of the DeepCwind Floating Wind Turbine Moored by a Single-Point Mooring System. Appl. Sci. 2018, 11, 2306. [Google Scholar] [CrossRef]
- Christian, K.; Frank, L.; Friedemann, B.; Denis, M.; Po, W.C. Validation of INNWIND.EU Scaled Model Tests of a Semisubmersible Floating Wind Turbine. In Proceedings of the International Ocean and Polar Engineering Conference, Rhodos, Greece, 26 June–1 July 2016. [Google Scholar]
- Ramachandran, G.K.V.; Robertson, A.N.; Jonkman, J.M.; Masciola, M.D. Investigation of Response Amplitude Operators for Floating Offshore Wind Turbines. In Proceedings of the 23rd International Ocean, Offshore and Polar Engineering Conference, Anchorage, AL, USA, 30 June–5 July 2013. [Google Scholar]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Turbine Properties | Value |
|---|---|
| Rotor configuration | Upwind, 3 Blades |
| Rotor diameter | 126 m |
| Hub height above SWL | 90 m |
| Cut-in wind speed | 3 m/s |
| Rated wind speed | 11.4 m/s |
| Cut-out wind speed | 25 m/s |
| Rotor mass | 110,000 kg |
| Nacelle mass | 240,000 kg |
| Tower mass | 347,460 kg |
| Items | Value |
|---|---|
| Depth to platform base below SWL (total draft) | 20.0 m |
| Elevation to platform top (tower base) above SWL | 10.0 m |
| Platform mass, including ballast | 13,473,000 kg |
| Displaced volume | 13,986.8 m3 |
| Center of mass (CM) location below SWL | 14.4 m |
| Platform roll inertia about CM | 8.011 × 109 kg m2 |
| Platform pitch inertia about CM | 8.011 × 109 kg m2 |
| Platform yaw inertia about platform centerline | 1.391 × 1010 kg m2 |
| Mooring System Properties | Value |
|---|---|
| Depth to anchors below SWL (water depth) | 200 m |
| Depth to fairleads below SWL | 14 m |
| Radius to anchors from platform centerline | 837.6 m |
| Radius to fairleads from platform centerline | 40.87 m |
| Unstretched mooring line length | 835.5 m |
| Mooring line diameter | 0.0766 m |
| Equivalent mooring line mass density | 113.35 kg/m |
| Equivalent mooring line mass in water | 108.63 kg/m |
| Equivalent mooring line extensional stiffness | 753.6 × 106 N |
| Seabed drag coefficient | 1.0 |
| Name | Sketch of the Models | L1 (m) | θ (°) |
|---|---|---|---|
| Model 1 (original OC4 model) |  | 0 | 0 |
| Model 2 |  | 90 | 0 |
| Model 3 |  | 70 | 0 |
| Model 4 |  | 50 | 0 |
| Model 5 |  | 0 | 15 |
| Model 6 |  | 0 | 30 |
| Model 7 |  | 50 | 30 |
| Line 1 (N) | Line 2 (N) | Line 3 (N) | |
|---|---|---|---|
| Model 1 | 1.11 × 106 | / | / |
| Model 2 | 1.19 × 106 | 6.68 × 105 | 6.68 × 105 |
| Model 3 | 1.24 × 106 | 7.94 × 105 | 7.94 × 105 |
| Model 4 | 1.32 × 106 | 1.25 × 106 | 1.25 × 106 |
| Model 5 | 1.11 × 106 | / | / |
| Model 6 | 1.11 × 106 | / | / |
| Model 7 | 1.32 × 106 | 1.25 × 106 | 1.25 × 106 |
| Surge (N/m) | Heave (N/m) | Pitch (Nm/deg) | |
|---|---|---|---|
| Model 1 | 73,047 | 17,534 | 1.213 × 106 |
| Model 2 | 73,676 | 17,681 | 1.219 × 106 |
| Model 3 | 77,551 | 17,776 | 1.228 × 106 |
| Model 4 | 87,832 | 17,912 | 1.239 × 106 |
| Model 5 | 73,302 | 17,641 | 1.217 × 106 |
| Model 6 | 72,986 | 17,682 | 1.223 × 106 |
| Model 7 | 89,901 | 18,025 | 1.245 × 106 |
| Model 1 | Model 2 | Model 3 | Model 4 | Model 5 | Model 6 | Model 7 | |
|---|---|---|---|---|---|---|---|
| Surge(s) | 109.4 | 108.9 | 106.2 | 98.7 | 109.2 | 109.4 | 97.6 |
| Heave(s) | 17.4 | 17.4 | 17.4 | 17.4 | 18.4 | 19.5 | 19.4 |
| Pitch(s) | 26.0 | 26.0 | 26.0 | 25.9 | 26.0 | 26.0 | 26.1 |
| Load Case | Wave Condition | H or Hs (m) | T or Tp (s) | Wind Condition |
|---|---|---|---|---|
| LC1 | Regular wave | 2.44 | 6.2 | Steady, uniform, Vhub = 8 m/s |
| LC2 | Regular wave | 5.32 | 8.4 | Steady, uniform, Vhub = 8 m/s |
| LC3 | Regular wave | 7.56 | 10.6 | Steady, uniform, Vhub = 8 m/s |
| LC4 | Irregular wave | 3.5 | 7.2 | Steady, uniform, Vhub = 8 m/s |
| LC5 | Irregular wave | 5.5 | 9.4 | Steady, uniform, Vhub = 8 m/s |
| LC6 | Irregular wave | 7.5 | 11.6 | Steady, uniform, Vhub = 8 m/s |
| DOF | Load Case | Model 1 | Model 2 | Model 3 | Model 4 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Max. | Min. | Mean | Max. | Min. | Mean | Max. | Min. | Mean | Max. | Min. | Mean | ||
| Surge (m) | LC1 | 6.03 | 4.97 | 5.47 | 6.04 | 5.08 | 5.57 | 5.28 | 4.41 | 4.84 | 3.76 | 3.01 | 3.38 |
| LC2 | 7.20 | 5.05 | 6.12 | 7.56 | 5.52 | 6.51 | 6.54 | 4.61 | 5.58 | 4.74 | 3.03 | 3.86 | |
| LC3 | 6.67 | 2.63 | 4.66 | 6.91 | 3.09 | 4.89 | 6.06 | 2.35 | 4.09 | 4.97 | 1.44 | 3.11 | |
| Heave (m) | LC1 | 1.16 | 0.93 | 1.04 | 1.13 | 0.91 | 1.02 | 1.10 | 0.88 | 0.98 | 1.01 | 0.79 | 0.90 |
| LC2 | 1.41 | 0.79 | 1.10 | 1.39 | 0.77 | 1.08 | 1.35 | 0.74 | 1.05 | 1.27 | 0.65 | 0.96 | |
| LC3 | 2.07 | 0.14 | 1.10 | 2.04 | 0.12 | 1.08 | 2.01 | 0.08 | 1.05 | 1.92 | 0.01 | 0.96 | |
| Pitch (°) | LC1 | 1.87 | 1.60 | 1.74 | 2.01 | 1.76 | 1.88 | 2.02 | 1.77 | 1.89 | 2.03 | 1.77 | 1.90 |
| LC2 | 2.69 | 1.01 | 1.85 | 2.88 | 1.21 | 2.04 | 2.89 | 1.22 | 2.05 | 2.90 | 1.22 | 2.05 | |
| LC3 | 3.16 | 0.40 | 1.76 | 3.31 | 0.51 | 1.88 | 3.31 | 0.52 | 1.89 | 3.31 | 0.53 | 1.90 | |
| DOF | Load Case | Model 1 | Model 2 | Model 3 | Model 4 |
|---|---|---|---|---|---|
| Surge (m) | LC1 | 1.06 | 0.96 | 0.87 | 0.75 |
| LC2 | 2.15 | 2.04 | 1.93 | 1.71 | |
| LC3 | 4.04 | 3.82 | 3.71 | 3.53 | |
| Heave (m) | LC1 | 0.23 | 0.22 | 0.22 | 0.22 |
| LC2 | 0.62 | 0.62 | 0.61 | 0.62 | |
| LC3 | 1.93 | 1.92 | 1.93 | 1.91 | |
| Pitch (°) | LC1 | 0.27 | 0.25 | 0.25 | 0.26 |
| LC2 | 1.68 | 1.67 | 1.67 | 1.68 | |
| LC3 | 2.76 | 2.80 | 2.79 | 2.78 |
| DOF | Load Case | Model 1 | Model 2 | Model 3 | Model 4 | ||||
|---|---|---|---|---|---|---|---|---|---|
| Frequency (Hz) | Peak | Frequency (Hz) | Peak | Frequency (Hz) | Peak | Frequency (Hz) | Peak | ||
| Surge (m2/Hz) | LC4 | 0.010 | 3.516 | 0.010 | 2.696 | 0.011 | 2.985 | 0.013 | 0.520 |
| LC5 | 0.008 | 1.325 | 0.008 | 2.531 | 0.010 | 1.165 | 0.012 | 0.223 | |
| LC6 | 0.010 | 1.872 | 0.008 | 2.295 | 0.010 | 1.59 | 0.012 | 0.329 | |
| Heave (m2/Hz) | LC4 | 0.058 | 0.022 | 0.058 | 0.022 | 0.058 | 0.021 | 0.058 | 0.019 |
| LC5 | 0.058 | 0.014 | 0.058 | 0.014 | 0.058 | 0.013 | 0.058 | 0.012 | |
| LC6 | 0.085 | 0.096 | 0.085 | 0.095 | 0.085 | 0.095 | 0.085 | 0.094 | |
| Pitch (deg2/Hz) | LC4 | 0.043 | 0.043 | 0.043 | 0.043 | 0.043 | 0.043 | 0.043 | 0.043 |
| LC5 | 0.043 | 0.104 | 0.043 | 0.104 | 0.043 | 0.104 | 0.043 | 0.104 | |
| LC6 | 0.082 | 0.125 | 0.082 | 0.123 | 0.082 | 0.122 | 0.082 | 0.122 | |
| Load Case | DOF | Model 1 | Model 2 | Model 3 | Model 4 |
|---|---|---|---|---|---|
| LC4 | Surge (m) | 1.276 | 1.258 | 1.211 | 0.707 |
| Heave (m) | 0.086 | 0.086 | 0.086 | 0.086 | |
| Pitch (°) | 0.276 | 0.273 | 0.272 | 0.273 | |
| LC5 | Surge (m) | 1.051 | 1.191 | 1.015 | 0.701 |
| Heave (m) | 0.256 | 0.256 | 0.256 | 0.256 | |
| Pitch (°) | 0.588 | 0.590 | 0.590 | 0.591 | |
| LC6 | Surge (m) | 1.401 | 1.529 | 1.373 | 1.041 |
| Heave (m) | 0.516 | 0.516 | 0.516 | 0.516 | |
| Pitch (°) | 0.744 | 0.753 | 0.752 | 0.753 |
| DOF | Load Case | Model 1 | Model 5 | Model 6 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Max. | Min. | Mean | Max. | Min. | Mean | Max. | Min. | Mean | ||
| Surge (m) | LC1 | 6.03 | 4.97 | 5.47 | 6.01 | 4.99 | 5.48 | 6.07 | 5.01 | 5.54 |
| LC2 | 7.20 | 5.05 | 6.12 | 7.18 | 5.09 | 6.13 | 7.23 | 5.16 | 6.19 | |
| LC3 | 6.67 | 2.63 | 4.66 | 6.64 | 2.62 | 4.68 | 6.69 | 2.71 | 4.72 | |
| Heave (m) | LC1 | 1.16 | 0.93 | 1.04 | 0.91 | 0.71 | 0.80 | 0.09 | −0.08 | 0.01 |
| LC2 | 1.41 | 0.79 | 1.10 | 1.18 | 0.55 | 0.86 | 0.36 | −0.27 | 0.05 | |
| LC3 | 2.07 | 0.14 | 1.10 | 1.83 | −0.10 | 0.86 | 1.01 | −0.91 | 0.05 | |
| Pitch (°) | LC1 | 1.87 | 1.60 | 1.74 | 1.87 | 1.60 | 1.74 | 1.88 | 1.60 | 1.74 |
| LC2 | 2.69 | 1.01 | 1.85 | 2.67 | 1.03 | 1.85 | 2.66 | 1.04 | 1.85 | |
| LC3 | 3.16 | 0.40 | 1.76 | 3.14 | 0.42 | 1.76 | 3.11 | 0.45 | 1.76 | |
| DOF | Load Case | Model 1 | Model 5 | Model 6 |
|---|---|---|---|---|
| Surge (m) | LC1 | 1.06 | 1.02 | 1.06 |
| LC2 | 2.15 | 2.09 | 2.07 | |
| LC3 | 4.04 | 4.02 | 3.98 | |
| Heave (m) | LC1 | 0.23 | 0.2 | 0.17 |
| LC2 | 0.62 | 0.63 | 0.63 | |
| LC3 | 1.93 | 1.93 | 1.92 | |
| Pitch (°) | LC1 | 0.27 | 0.27 | 0.28 |
| LC2 | 1.68 | 1.64 | 1.62 | |
| LC3 | 2.76 | 2.72 | 2.66 |
| DOF | Load Case | Model 1 | Model 5 | Model 6 | |||
|---|---|---|---|---|---|---|---|
| Frequency (Hz) | Peak | Frequency (Hz) | Peak | Frequency (Hz) | Peak | ||
| Surge (m2/Hz) | LC4 | 0.010 | 3.516 | 0.010 | 3.329 | 0.010 | 3.329 |
| LC5 | 0.008 | 1.325 | 0.008 | 1.307 | 0.008 | 1.413 | |
| LC6 | 0.012 | 1.872 | 0.012 | 1.641 | 0.012 | 1.574 | |
| Heave (m2/Hz) | LC4 | 0.058 | 0.022 | 0.055 | 0.015 | 0.052 | 0.002 |
| LC5 | 0.058 | 0.014 | 0.058 | 0.010 | 0.112 | 0.015 | |
| LC6 | 0.085 | 0.097 | 0.085 | 0.097 | 0.085 | 0.092 | |
| Pitch (deg2/Hz) | LC4 | 0.043 | 0.043 | 0.043 | 0.043 | 0.043 | 0.043 |
| LC5 | 0.043 | 0.104 | 0.043 | 0.097 | 0.043 | 0.092 | |
| LC6 | 0.082 | 0.060 | 0.082 | 0.057 | 0.082 | 0.051 | |
| Load Case | DOF | Model 1 | Model 5 | Model 6 |
|---|---|---|---|---|
| LC4 | Surge (m) | 1.276 | 1.244 | 1.264 |
| Heave (m) | 0.086 | 0.075 | 0.042 | |
| Pitch (°) | 0.276 | 0.273 | 0.269 | |
| LC5 | Surge (m) | 1.051 | 1.030 | 1.040 |
| Heave (m) | 0.256 | 0.257 | 0.232 | |
| Pitch (°) | 0.588 | 0.578 | 0.565 | |
| LC6 | Surge (m) | 1.401 | 1.377 | 1.381 |
| Heave (m) | 0.516 | 0.519 | 0.514 | |
| Pitch (°) | 0.744 | 0.734 | 0.720 |
| Load Case | DOF | Model 1 | Model 4 | Model 6 | Model 7 |
|---|---|---|---|---|---|
| LC4 | Surge (m) | 1.276 | 0.707 | 1.264 | 0.706 |
| Heave (m) | 0.086 | 0.086 | 0.042 | 0.042 | |
| Pitch (°) | 0.276 | 0.273 | 0.269 | 0.272 | |
| LC5 | Surge (m) | 1.051 | 0.701 | 1.040 | 0.702 |
| Heave (m) | 0.256 | 0.256 | 0.232 | 0.231 | |
| Pitch (°) | 0.588 | 0.591 | 0.565 | 0.578 | |
| LC6 | Surge (m) | 1.401 | 1.041 | 1.381 | 1.039 |
| Heave (m) | 0.516 | 0.516 | 0.514 | 0.513 | |
| Pitch (°) | 0.744 | 0.753 | 0.720 | 0.744 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Zhou, Q.; Tu, Y.; Wang, W.; Hua, X. Proposal of a Novel Semi-Submersible Floating Wind Turbine Platform Composed of Inclined Columns and Multi-Segmented Mooring Lines. Energies 2019, 12, 1809. https://doi.org/10.3390/en12091809
Liu Z, Zhou Q, Tu Y, Wang W, Hua X. Proposal of a Novel Semi-Submersible Floating Wind Turbine Platform Composed of Inclined Columns and Multi-Segmented Mooring Lines. Energies. 2019; 12(9):1809. https://doi.org/10.3390/en12091809
Chicago/Turabian StyleLiu, Zhenqing, Qingsong Zhou, Yuangang Tu, Wei Wang, and Xugang Hua. 2019. "Proposal of a Novel Semi-Submersible Floating Wind Turbine Platform Composed of Inclined Columns and Multi-Segmented Mooring Lines" Energies 12, no. 9: 1809. https://doi.org/10.3390/en12091809
APA StyleLiu, Z., Zhou, Q., Tu, Y., Wang, W., & Hua, X. (2019). Proposal of a Novel Semi-Submersible Floating Wind Turbine Platform Composed of Inclined Columns and Multi-Segmented Mooring Lines. Energies, 12(9), 1809. https://doi.org/10.3390/en12091809