Advanced Electric Vehicle Fast-Charging Technologies



Abstract
1. Introduction
2. Further Motivations
2.1. EV Comparison: GM EV1 vs. 2018 Chevy Bolt
2.2. EV Charging Plugs
3. EV Battery Considerations
3.1. Kinetics of EV Battery
3.2. Current Limit
3.3. C-Rate
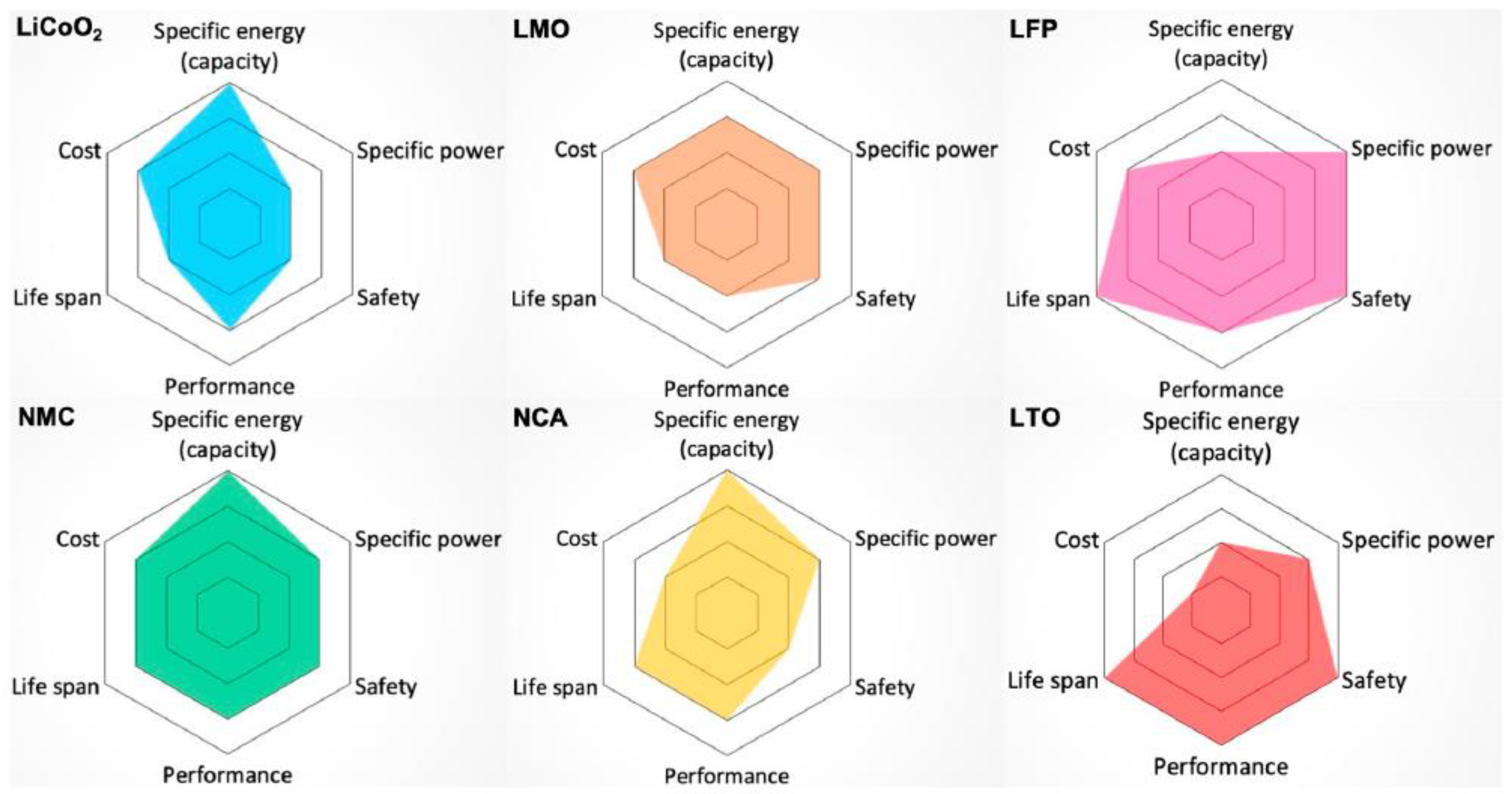
3.4. Current and Future EV Battery Types
4. Battery Charging Methods
4.1. Battery Charging Strategy
4.1.1. Constant Voltage
4.1.2. Constant Current
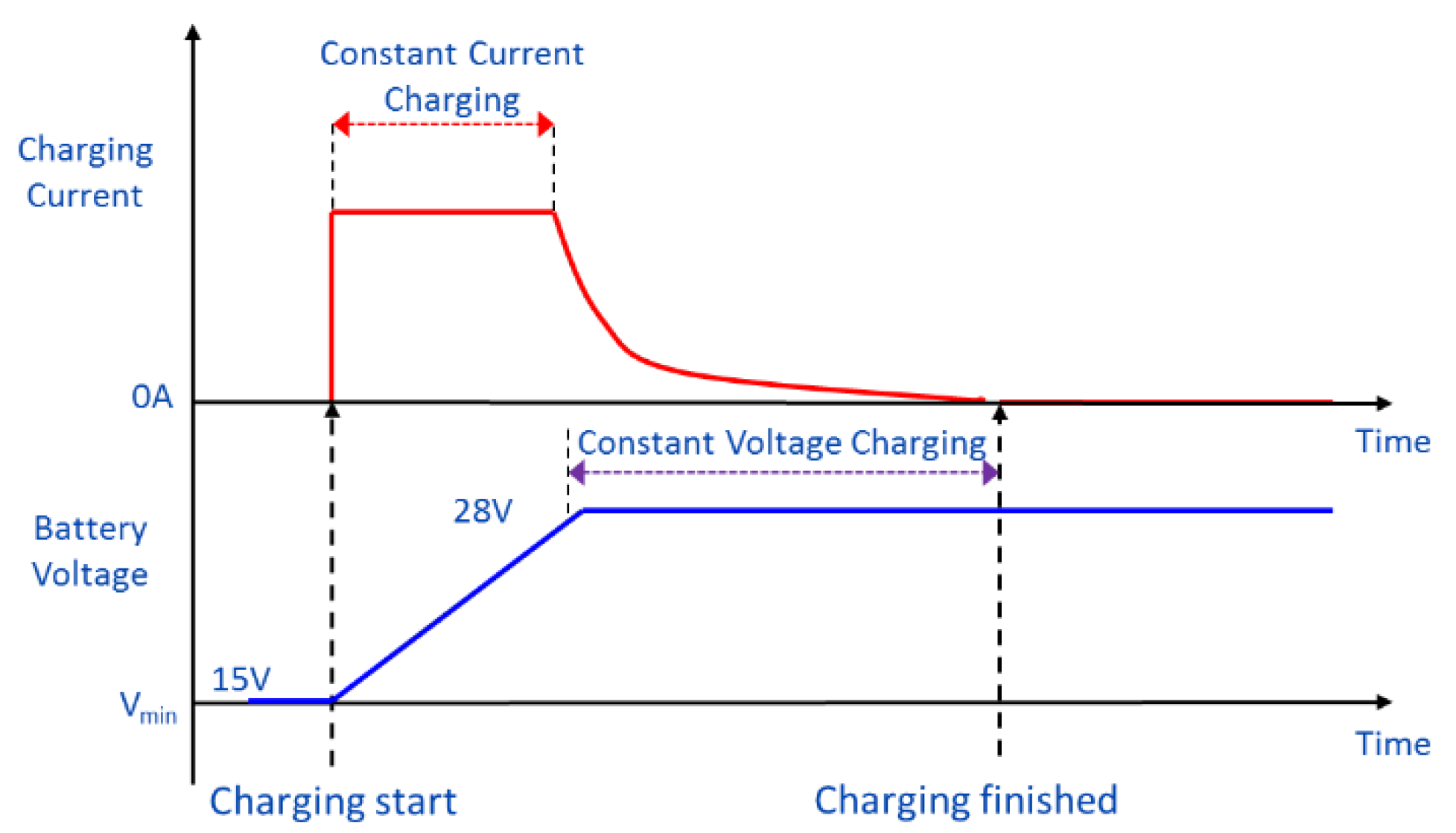
4.1.3. Constant Current-Constant Voltage (CC-CV).
4.1.4. Pulse Charging
4.1.5. Negative Pulse Charging
4.2. Physical Implementations of Battery Charging Infrastructure
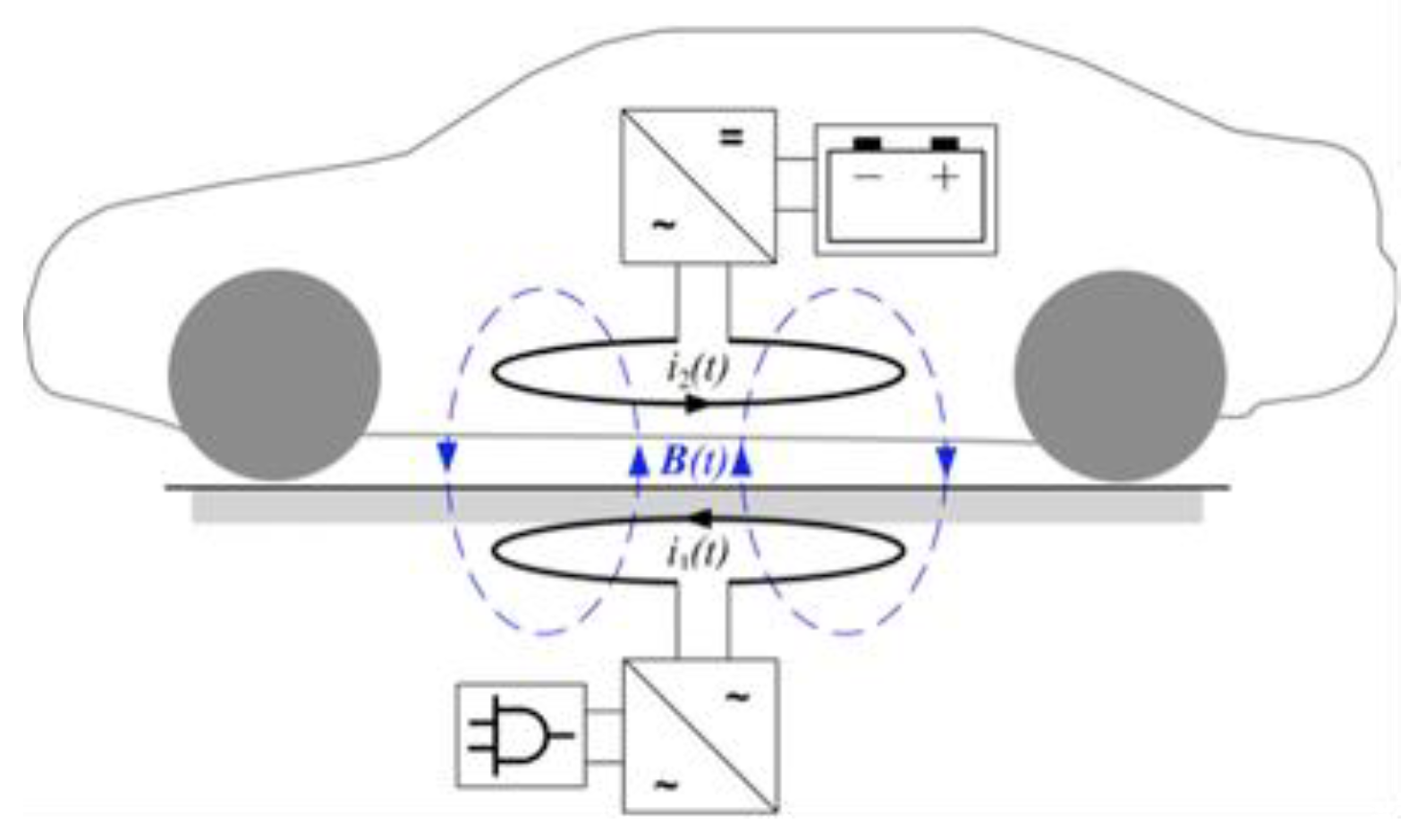
4.2.1. Inductive Charging (Static and Dynamic)
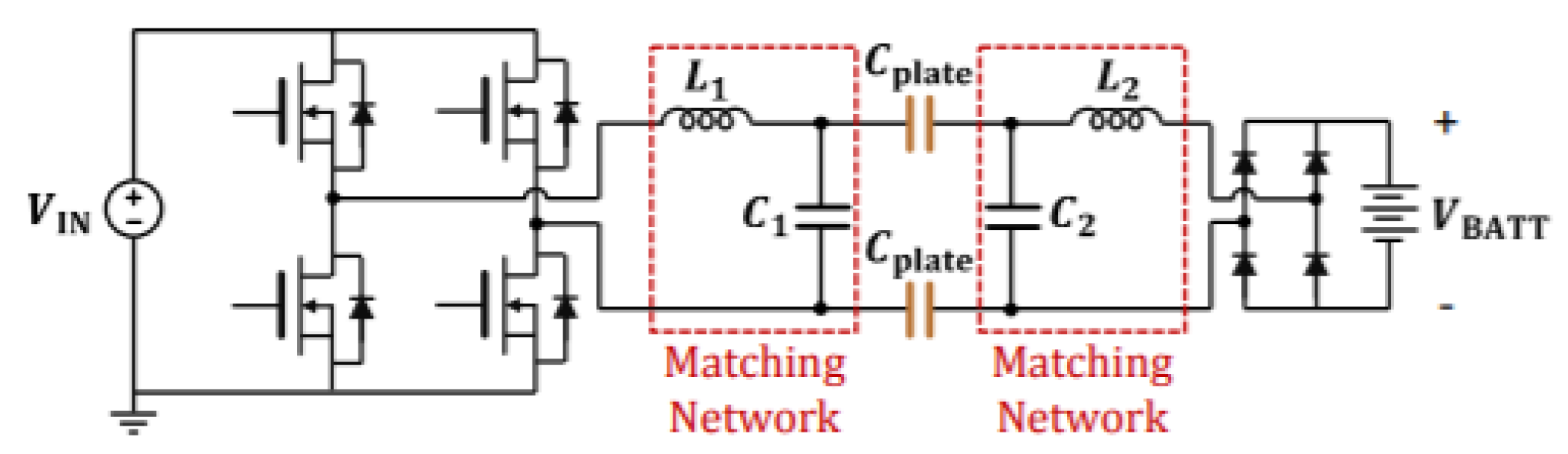
4.2.2. Capacitive Charging (Static and Dynamic)
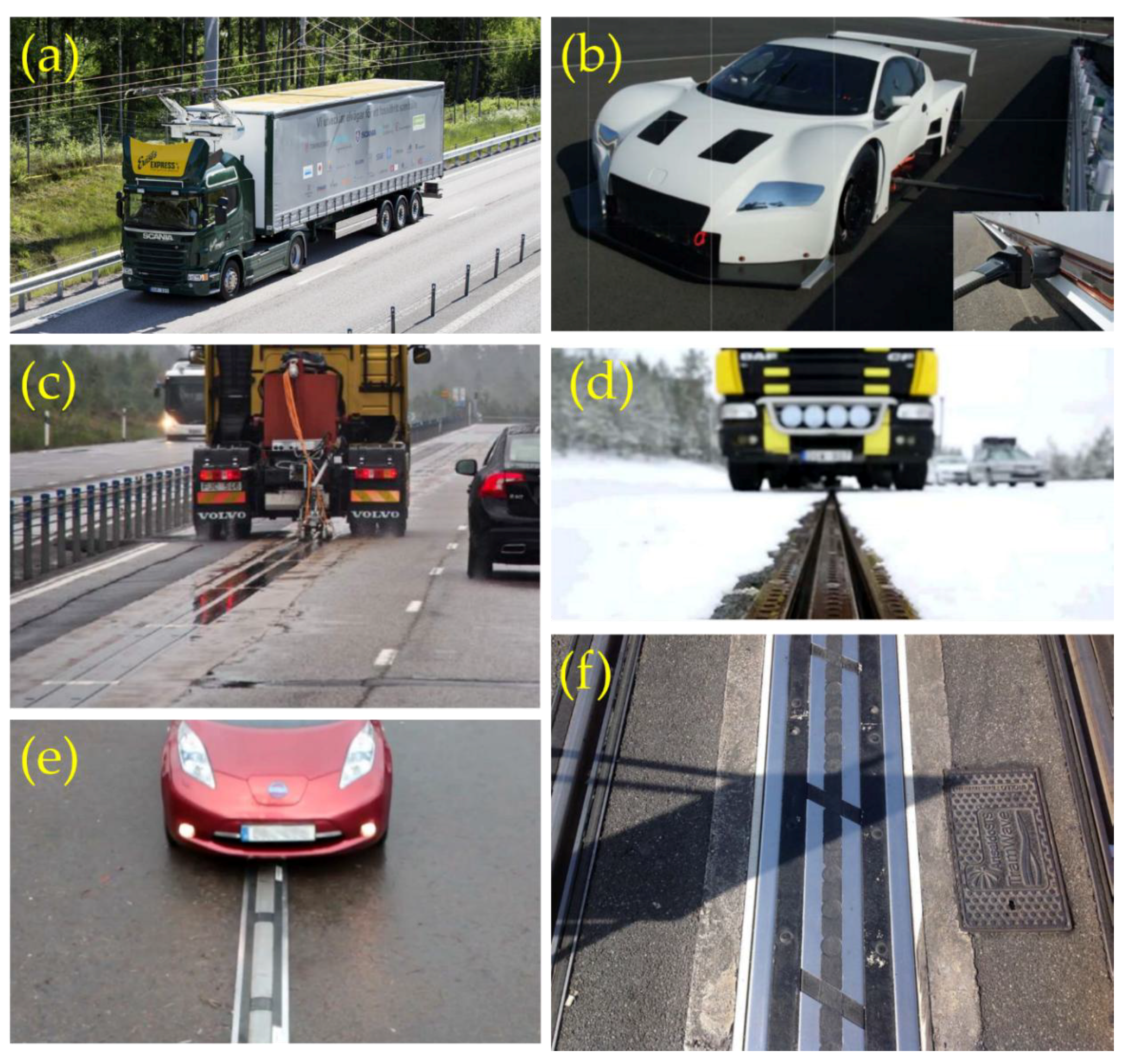
4.2.3. Dynamic Conductive Charging
5. Battery Thermal Management
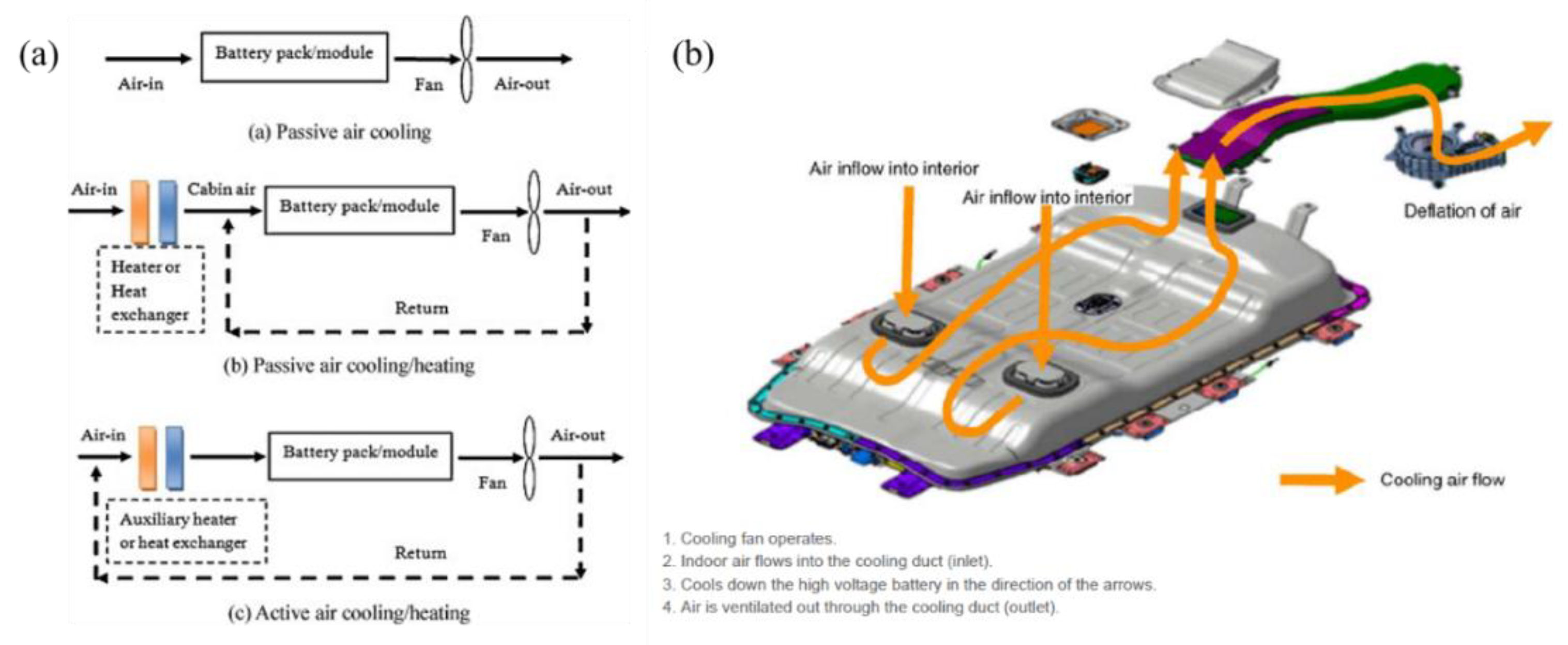
5.1. Air Cooling
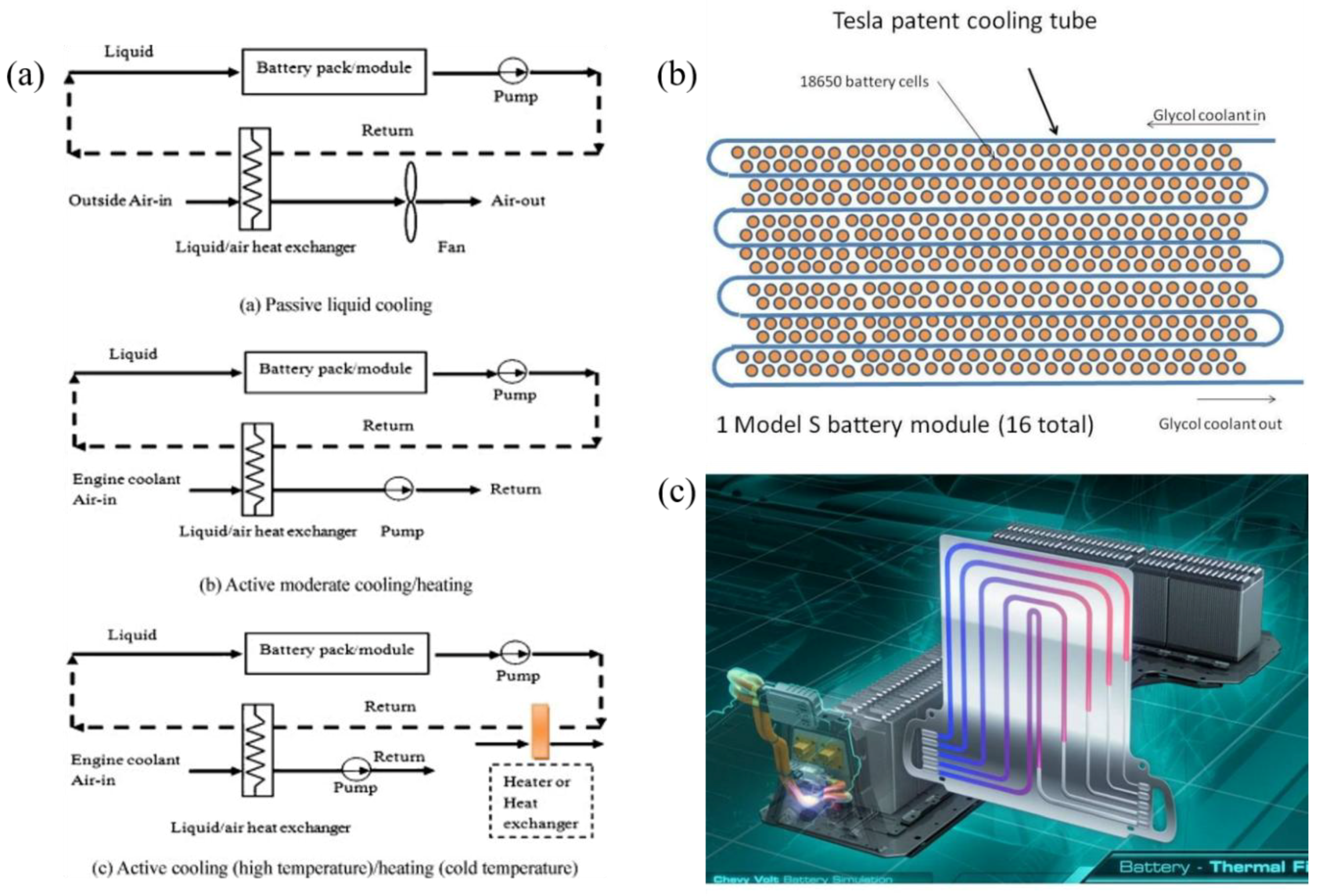
5.2. Liquid Cooling
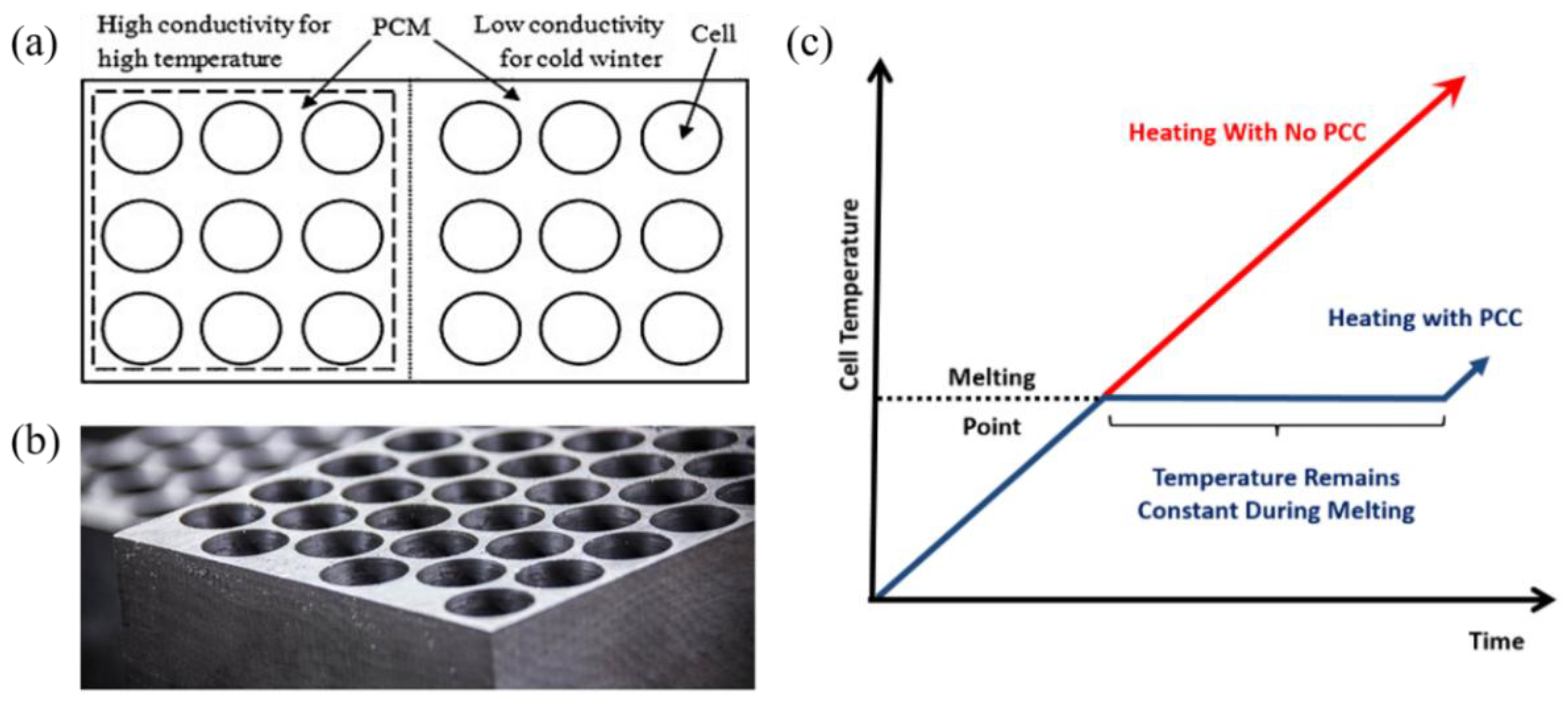
5.3. Phase Change Materials
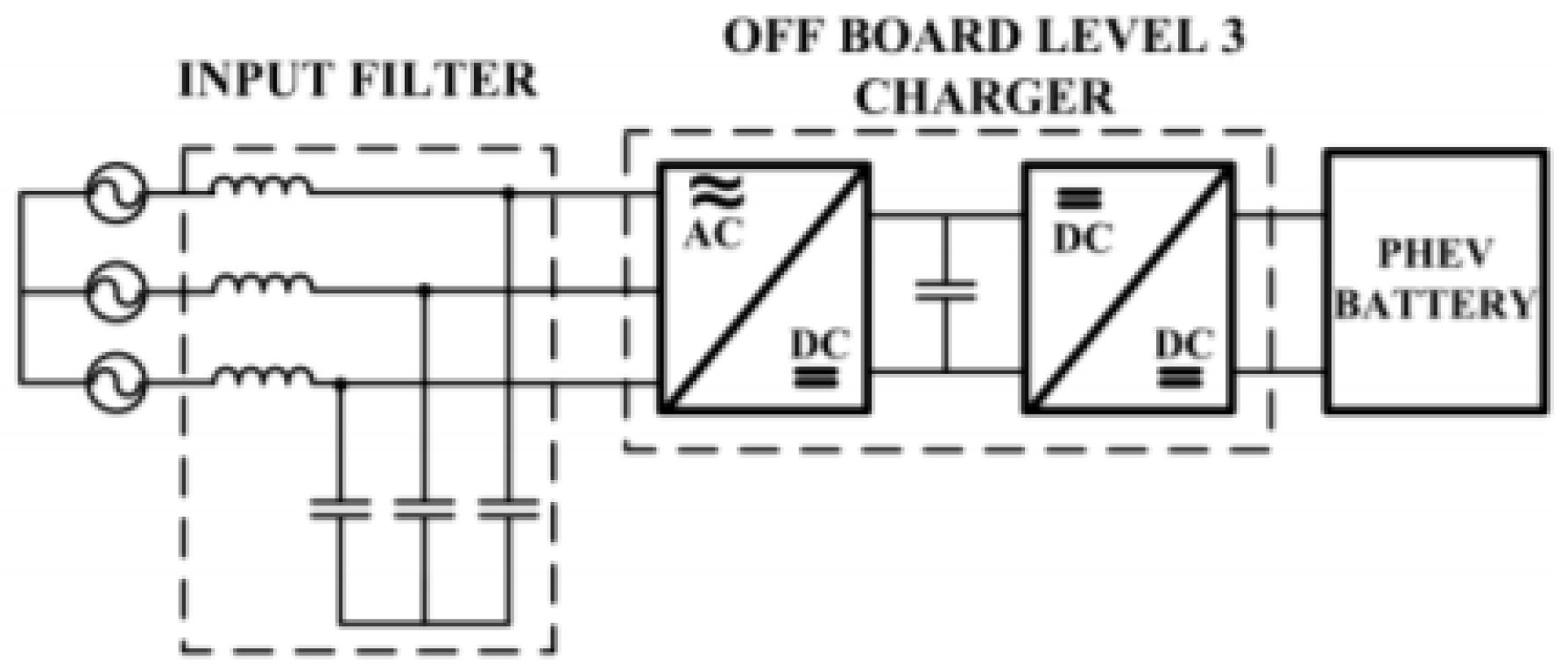
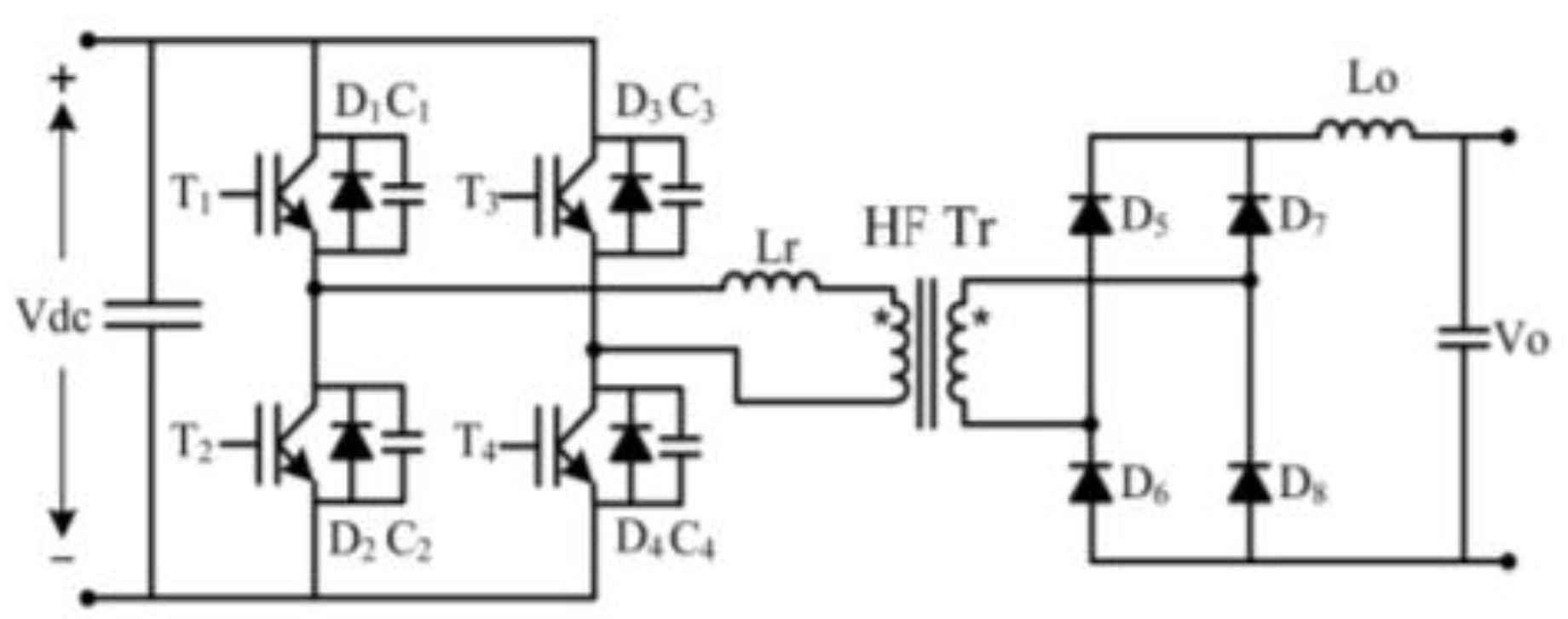
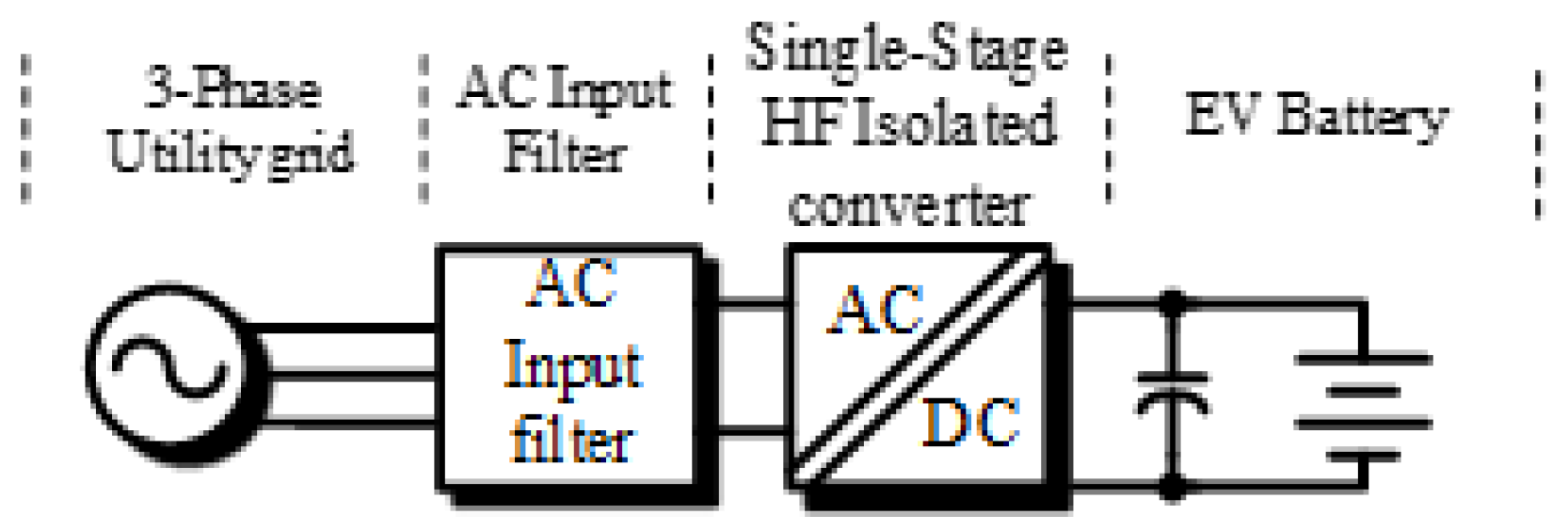
6. Fast-Charging Power Electronics
7. New Areas of Research
7.1. Power Electronic Converters
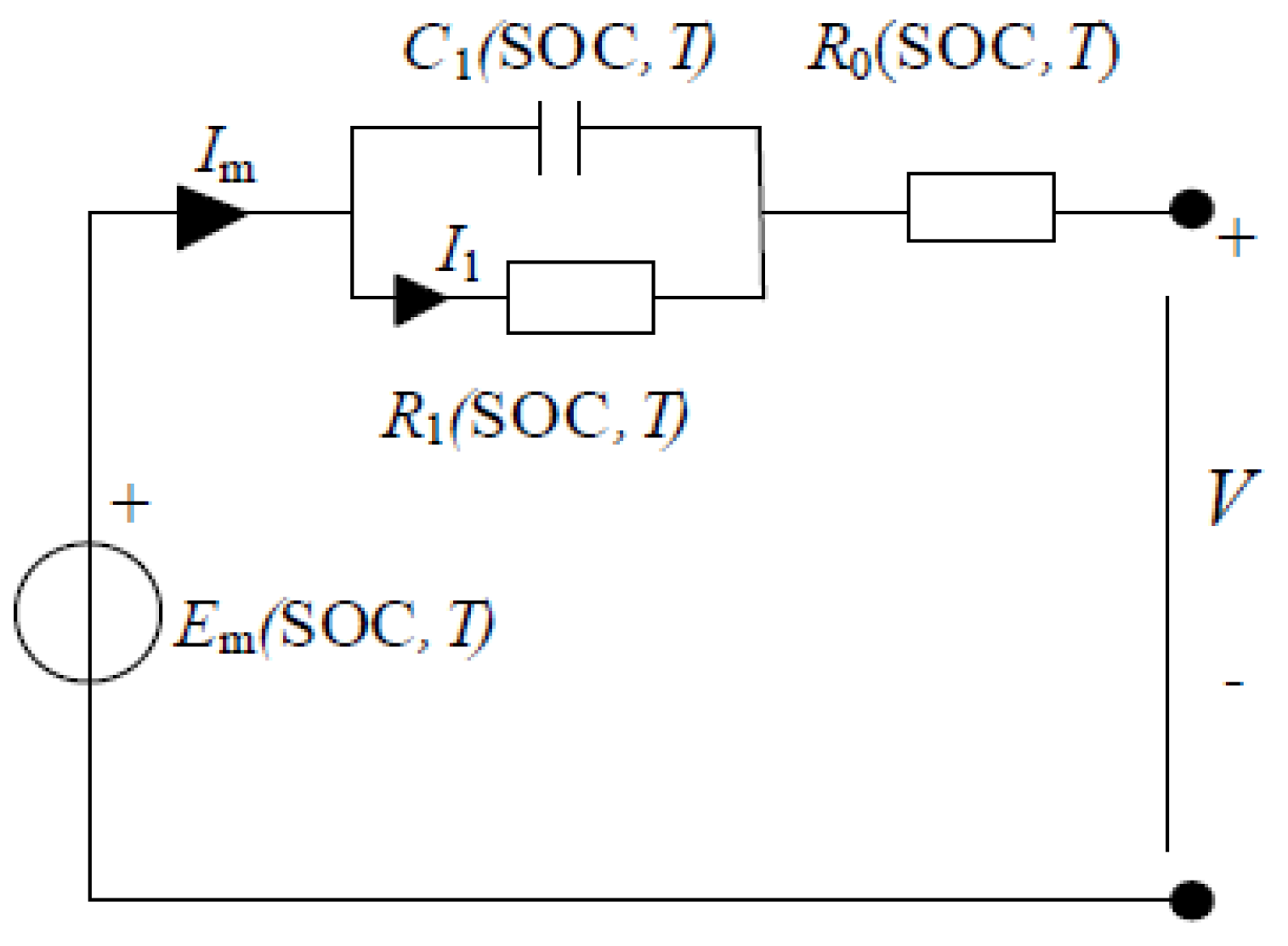
7.2. Battery System Modeling
7.3. Impact on the Grid and Local Energy Storage
7.4. Systems Level Research
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pillot, C. Micro hybrid, HEV, P-HEV and EV market 2012–2025 impact on the battery business. In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Hannisdahl, O.H.; Malvik, H.V.; Wensaas, G.B. The future is electric! The EV revolution in Norway—Explanations and lessons learned. In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–13. [Google Scholar] [CrossRef]
- Blanning, B. The economics of EVs and the roles of government. In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–6. [Google Scholar] [CrossRef]
- U.S. Energy Information Administration—EIA—Independent Statistics and Analysis: Does the World Have Enough Oil to Meet Our Future Needs? Available online: https://www.eia.gov/tools/faqs/faq.php?id=38&t=6 (accessed on 13 February 2019).
- Alternative Fuels Data Center: Hydrogen Benefits and Considerations: Electric Vehicle Benefits and Considerations. Available online: https://afdc.energy.gov/fuels/electricity_benefits.html (accessed on 13 February 2019).
- February 2019 Monthly Energy Review. U.S. Energy Information Administration, Office of Energy Statistics, U.S. Department of Energy Report DOE/EIA-0035(2019/2). Available online: https://www.eia.gov/totalenergy/data/monthly/pdf/mer.pdf (accessed on 20 March 2019).
- Department of Energy: Vehicle Charging. Available online: https://www.energy.gov/eere/electricvehicles/vehicle-charging (accessed on 13 February 2019).
- Kim, W.; Anorve, V.; Tefft, B.C. American Driving Survey: 2014–2017. (Research Brief). AAA Foundation for Traffic Safety: Washington, DC, USA, 2019. Available online: https://aaafoundation.org/wp-content/uploads/2019/02/2019_AAAFTS-ADS-Brief.pdf (accessed on 2 April 2019).
- Miles, A. What Are The Most Efficient Electric Cars? Available online: https://cleantechnica.com/2018/06/30/what-are-the-most-efficient-electric-cars/ (accessed on 2 April 2019).
- For the Applicable US Regulation See Rule 40 CFR 80.22. Available online: https://www.govinfo.gov/content/pkg/CFR-1999-title40-vol11/pdf/CFR-1999-title40-vol11-sec80-22.pdf (accessed on 31 March 2019).
- For the Applicable Canadian Regulation See the Gasoline and Gasoline Blend Dispensing Flow Rate Regulations (SOR/2000-43). Available online: https://laws-lois.justice.gc.ca/eng/regulations/SOR-2000-43/page-1.html#h-3 (accessed on 31 March 2019).
- Where the Energy Goes: Gasoline Vehicles. Available online: https://www.fueleconomy.gov/feg/atv.shtml (accessed on 1 April 2019).
- 2018 Chevrolet Bolt EV Features & Specs. Available online: https://www.gmfleet.com/chevrolet/bolt-ev-electric-vehicle/features-specs-trims-dimensions.html (accessed on 31 October 2018).
- Chevy EV Life: Bolt EV Charging Guide | Chevrolet. Available online: https://www.chevyevlife.com/bolt-ev-charging-guide (accessed on 31 October 2018).
- Herron, D. What is the technical limitations on maximum electric car charging rate, why is the Tesla Supercharger limit to 120 kW? Range Confidence: Charge Fast, Drive Far, in Your Electric Car. 2017. Available online: https://greentransportation.info/ev-charging/range-confidence/chap8-tech/charge-rate-limitations.html (accessed on 27 March 2019).
- SAE International. Available online: http://www.sae.org/ (accessed on 31 October 2018).
- Hybrid Committee. SAE Electric Vehicle and Plug in Hybrid Electric Vehicle Conductive Charge Coupler; Standard J1772; SAE International: Detroit, MI, USA, 1996. [Google Scholar]
- Range Confidence: Charge Fast, Drive Far, with your Electric Car. Available online: https://greentransportation.info/ev-charging/range-confidence/chap8-tech/ev-dc-fast-charging-standards-chademo-ccs-sae-combo-tesla-supercharger-etc.html (accessed on 3 May 2019).
- High Power—Chademo Association. Available online: https://www.chademo.com/technology/high-power/ (accessed on 30 October 2018).
- China and Japan Push for a Global Charging Standard for EVs. IEEE Spectrum. Available online: https://spectrum.ieee.org/energywise/transportation/efficiency/a-global-charging-standard-for-evs (accessed on 20 March 2019).
- Introducing V3 Supercharging. Available online: https://www.tesla.com/blog/introducing-v3-supercharging (accessed on 28 March 2019).
- Jow, T.R.; Delp, S.A.; Allen, J.L.; Jones, J.-P.; Smart, M.C. Factors limiting Li+ charge transfer kinetics in Li-ion batteries. J. Electrochem. Soc. 2018, 165, A361–A367. [Google Scholar] [CrossRef]
- Bard, A.J.; Faulkner, L.R. Electrochemical Methods. Fundamentals and Applications, 2nd ed.; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Rideal, E.K. Overpotential and catalytic activity. J. Am. Chem. Soc. 1920, 42, 94–105. [Google Scholar] [CrossRef][Green Version]
- Tafel, J. Über die Polarisation bei kathodischer Wasserstoffentwicklung. Z. Physik. Chem. 1905, 50A, 641–712. [Google Scholar] [CrossRef]
- Armstrong, A.R.; Holzapfel, M.; Novák, P.; Johnson, C.S.; Kang, S.-H.; Thackeray, M.M.; Bruce, P.G. Demonstrating Oxygen Loss and Associated Structural Reorganization in the Lithium Battery Cathode Li[Ni0.2Li0.2Mn0.6]O2. J. Am. Chem. Soc. 2006, 128, 8694–8698. [Google Scholar] [CrossRef] [PubMed]
- Pinson, M.B.; Bazant, M.Z. Theory of SEI Formation in Rechargeable Batteries: Capacity Fade, Accelerated Aging and Lifetime Prediction. J. Electrochem. Soc. 2013, 160, A243–A250. [Google Scholar] [CrossRef]
- Legrand, N.; Knosp, B.; Desprez, P.; Lapicque, F.; Raël, S. Physical characterization of the charging process of a Li-ion battery and prediction of Li plating by electrochemical modelling. J. Power Sources 2014, 245, 208–216. [Google Scholar] [CrossRef]
- Jiang, J.; Liu, Q.; Zhang, C.; Zhang, W. Evaluation of Acceptable Charging Current of Power Li-Ion Batteries Based on Polarization Characteristics. IEEE Trans. Ind. Electron. 2014, 61, 6844–6851. [Google Scholar] [CrossRef]
- Battery Chargers and Charging Methods. Available online: https://www.mpoweruk.com/chargers.htm (accessed on 31 March 2019).
- BU-402: What is C-rate? Available online: https://batteryuniversity.com/learn/article/what_is_the_c_rate (accessed on 31 March 2019).
- Is Li-Ion the Solution for the Electric Vehicle? Available online: https://batteryuniversity.com/learn/archive/is_li_ion_the_solution_for_the_electric_vehicle (accessed on 1 May 2019).
- Miao, Y.; Hynan, P.; von Jouanne, A.; Yokochi, A. Current Li-Ion Battery Technologies in Electric Vehicles and Opportunities for Advancements. Energies 2019, 12, 1074. [Google Scholar] [CrossRef]
- Trivedi, N.; Gujar, N.S.; Sarkar, S.; Pundir, S.P.S. Different fast charging methods and topologies for EV charging. In Proceedings of the 2018 IEEMA Engineer Infinite Conference (eTechNxT), New Delhi, India, 13–14 March 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Bentley, W.F.; Heacock, D.K. Battery management considerations for multichemistry systems. In Proceedings of the 11th Annual Battery Conference on Applications and Advances, Long Beach, CA, USA, 9–12 January 1996; pp. 223–228. [Google Scholar] [CrossRef]
- Zhang, S.S. The effect of the charging protocol on the cycle life of a Li-ion battery. J. Power Sources 2006, 161, 1385–1391. [Google Scholar] [CrossRef]
- Anseán, D.; González, M.; Viera, J.C.; García, V.M.; Blanco, C.; Valledor, M. Fast charging technique for high power lithium iron phosphate batteries: A cycle life analysis. J. Power Sources 2013, 239, 9–15. [Google Scholar] [CrossRef]
- Power Topics for Power Supply Users: Constant Voltage, Constant Current Battery Charging. Available online: http://power-topics.blogspot.com/2016/05/constant-voltage-constant-current.html (accessed on 12 November 2018).
- A Better Route Planner. Available online: https://forum.abetterrouteplanner.com/ (accessed on 2 April 2019).
- Tesla Battery Charging Data from 801 Cars. Available online: https://forum.abetterrouteplanner.com/blogs/entry/6-tesla-battery-charging-data-from-801-cars/ (accessed on 31 March 2019).
- Li, J.; Murphy, E.; Winnick, J.; Koh, P.A. The effects of pulse charging on cycling characteristics of commercial lithium-ion batteries. J. Power Sources 2001, 102, 302–309. [Google Scholar] [CrossRef]
- Yin, M.D.; Youn, J.; Park, D.; Cho, J. Dynamic Frequency and Duty Cycle Control Method for Fast Pulse-Charging of Lithium Battery Based on Polarization Curve. In Proceedings of the 2015 Ninth International Conference on Frontier of Computer Science and Technology, Dalian, China, 26–28 August 2015; pp. 40–45. [Google Scholar] [CrossRef]
- Amanor-Boadu, J.M.; Guiseppe-Elie, A.; Sanchez-Sinencio, E. The Impact of Pulse Charging Parameters on the Life Cycle of Lithium-Ion Polymer Batteries. Energies 2018, 11, 2162. [Google Scholar] [CrossRef]
- Chu, Y.S.; Chen, R.Y.; Liang, T.J.; Changchien, S.K.; Chen, J.F. Positive/negative pulse battery charger with energy feedback and power factor correction. In Proceedings of the Twentieth Annual IEEE Applied Power Electronics Conference and Exposition, Austin, TX, USA, 6–10 March 2005; pp. 986–990. [Google Scholar] [CrossRef]
- Hsieh, Y.C.; Moo, C.S.; Wu, C.K.; Cheng, J.C. A non-dissipative reflex charging circuit. In Proceedings of the 25th International Telecommunications Energy Conference, Yokohama, Japan, 23 October 2003; pp. 679–683. [Google Scholar]
- Serhan, H.A.; Ahmed, E.M. Effect of the different charging techniques on battery life-time: Review. In Proceedings of the 2018 International Conference on Innovative Trends in Computer Engineering (ITCE), Aswan, Egypt, 19–21 February 2018; pp. 421–426. [Google Scholar] [CrossRef]
- Monem, M.A.; Trad, K.; Omar, N.; Hegazy, O.; Mantels, B.; Mulder, G.; Van den Bossche, P.; Van Mierlo, J. Lithium-ion batteries: Evaluation study of different charging methodologies based on aging process. Appl. Energy 2015, 152, 143–155. [Google Scholar] [CrossRef]
- Optimization of Inductive Charging Systems for Electric Vehicles with Vehicle-to-Grid Capability. Available online: http://www.pe.tf.uni-kiel.de/en/research/old-projects/optimization-of-inductive-charging-systems-for-electric-vehicles-with-vehicle-to-grid-capability-1 (accessed on 31 October 2018).
- Sanz, J.F.; Villa, J.L.; Sallán, J.; Perié, J.M.; Duarte, L.G. UNPLUGGED project: Development of a 50 kW inductive electric vehicle battery charge system. In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–7. [Google Scholar] [CrossRef]
- Galigekere, V.P.; Pries, J.; Onar, O.C.; Su, G.; Anwar, S.; Wiles, R.; Seiber, L.; Wilkins, J. Design and Implementation of an Optimized 100 kW Stationary Wireless Charging System for EV Battery Recharging. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 3587–3592. [Google Scholar] [CrossRef]
- Overview about Wireless Charging of Electrified Vehicles—Basic Principles and Challenges. Available online: https://tec.ieee.org/newsletter/july-august-2014/overview-about-wireless-charging-of-electrified-vehicles-%E2%80%93-basic-principles-and-challenges (accessed on 29 March 2019).
- Yao, C.; Zhao, W.; Ma, D.; Yang, X.; Tang, H. 3D modelling of metal shield on circular coil pad for contactless electric vehicle charging using finite element analysis. In Proceedings of the 2016 IEEE 2nd Annual Southern Power Electronics Conference (SPEC), Auckland, New Zealand, 5–8 December 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Idris Elnait, K.E.; Huang, L.; Tan, L.; Wang, S.; Wu, X. Resonant Reactive Current Shield Design in WPT Systems for Charging EVs. In Proceedings of the 2018 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Kota Kinabalu, Malaysia, 7–10 October 2018; pp. 56–59. [Google Scholar] [CrossRef]
- Regensburger, B.; Kumar, A.; Sinha, H.; Afridi, K. High-Performance 13.56-MHz Large Air-Gap Capacitive Wireless Power Transfer System for Electric Vehicle Charging. In Proceedings of the 2018 IEEE 19th Workshop on Control and Modeling for Power Electronics (COMPEL), Padua, Italy, 25–28 June 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Lu, F.; Zhang, H.; Kan, T.; Hofmann, H.; Mei, Y.; Cai, L.; Mi, C. A high efficiency and compact inductive power transfer system compatible with both 3.3 kW and 7.7 kW receivers. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, Tampa, FL, USA, 26–30 March 2017; pp. 3669–3673. [Google Scholar] [CrossRef]
- Lu, F.; Zhang, H.; Mi, C. A review on the recent development of capacitive wireless power transfer technology. Energies 2017, 10, 1752. [Google Scholar] [CrossRef]
- Zhang, H.; Lu, F.; Hofmann, H.; Liu, W.; Mi, C. Six-plate capacitive coupler to reduce electric field emission in large air-gap capacitive power transfer. IEEE Trans. Power Electron. 2018, 33, 665–675. [Google Scholar] [CrossRef]
- Li, S.; Li, W.; Deng, J.; Nguyen, T.D.; Mi, C. A double-sided LCC compensation network and its tuning method for wireless power transfer. IEEE Trans. Veh. Technol. 2015, 64, 2261–2273. [Google Scholar] [CrossRef]
- Alaküla, M.; Márquez-Fernández, F.J. Dynamic charging solutions in Sweden: An overview. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Harbin, China, 7–10 August 2017. [Google Scholar] [CrossRef]
- Fyhr, P.; Domingues, G.; Andersson, M.; Márquez-Fernández, F.J.; Bängtsson, H.; Alaküla, M. Electric roads: Reducing the societal cost of automotive electrification. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo (ITEC), Chicago, IL, USA, 22–24 June 2017; pp. 773–778. [Google Scholar] [CrossRef]
- eHighway – Electrification of Road Freight Transport. Available online: https://new.siemens.com/global/en/products/mobility/road-solutions/electromobility/ehighway.html (accessed on 29 March 2019).
- 2016: World’s First Electric Road Opens in Sweden. Available online: https://www.scania.com/group/en/2016-worlds-first-electric-road-opens-in-sweden/ (accessed on 29 March 2019).
- Tajima, T.; Tanaka, H.; Fukuda, T.; Nakasato, Y.; Noguchi, W.; Katsumasa, Y.; Aruga, T. Study of high power dynamic charging system. SAE 2017. [Google Scholar] [CrossRef]
- Slide-in Electric Road System: Conductive Project, Viktoria Swedish ICT on Behalf of Scania and Volvo GTT, Tech. Rep., 2013. Available online: https://www.viktoria.se/sites/default/files/pub/www.viktoria.se/upload/publications/slide-in_conductive_project_report_phase_1_1.pdf (accessed on 29 March 2019).
- Elways Solution: Conductive Feeding of Vehicle in Motion. Available online: http://elways.se/?lang=en (accessed on 29 March 2019).
- Elonroad. Electric Road. Available online: http://elonroad.com/ (accessed on 29 March 2019).
- TramWave. Ansaldo STS. Available online: http://www.ansaldo-sts.com/sites/ansaldosts/files/downloads/whats_tramwave_-_ansaldo_sts_-_1.pdf (accessed on 29 March 2019).
- Alaoui, C.; Salameh, Z.M. A novel thermal management for electric and hybrid vehicles. IEEE Trans. Veh. Technol. 2005, 54, 468–476. [Google Scholar] [CrossRef]
- Alaoui, C. Passive/Active BTMS For EV Lithium-Ion Batteries. IEEE Trans. Veh. Technol. 2018, 67, 3709–3719. [Google Scholar] [CrossRef]
- Qiang, J.; Yang, L.; Ao, G.; Zhong, H. Battery Management System for Electric Vehicle Application. In Proceedings of the 2006 IEEE International Conference on Vehicular Electronics and Safety, Shanghai, China, 13–15 December 2006; pp. 134–138. [Google Scholar] [CrossRef]
- Saw, L.H.; Tay, A.A.O.; Zhang, L.W. Thermal management of lithium-ion battery pack with liquid cooling. In Proceedings of the 2015 31st Thermal Measurement, Modeling & Management Symposium (SEMI-THERM), San Jose, CA, USA, 15–19 March 2015; pp. 298–302. [Google Scholar] [CrossRef]
- Chen, Y.; Ma, Y.; Duan, P.; Cherr, H. Estimation of State of Charge for Lithium-ion Battery Considering Effect of Aging and Temperature. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 8472–8477. [Google Scholar] [CrossRef]
- Jaguemont, J.; Boulon, L.; Dubé, Y. Characterization and Modeling of a Hybrid-Electric-Vehicle Lithium-Ion Battery Pack at Low Temperatures. IEEE Trans. Veh. Technol. 2016, 65, 1–14. [Google Scholar] [CrossRef]
- Song, H.S.; Jeong, J.B.; Lee, B.H.; Shin, D.H.; Kim, B.H.; Kim, T.H.; Heo, H. Experimental study on the effects of pre-heating a battery in a low-temperature environment. In Proceedings of the 2012 IEEE Vehicle Power and Propulsion Conference, Seoul, South Korea, 9–12 October 2012; pp. 1198–1201. [Google Scholar] [CrossRef]
- Kim, B.G.; Tredeau, F.P.; Salameh, Z.M. Performance evaluation of lithium polymer batteries for use in electric vehicles. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Rao, Z.; Wang, S. A review of power battery thermal energy management. Renew. Sustain. Energy Rev. 2011, 15, 4554–4571. [Google Scholar] [CrossRef]
- Battery Warmup Can Speed Tesla Charging. Available online: https://www.autonews.com/technology/battery-warmup-can-speed-tesla-charging (accessed on 1 May 2019).
- Pesaran, A.A.; Vlahinos, A.; Burch, S.D. Thermal performance of EV and HEV battery modules and packs. In Proceedings of the 14th International Electric Vehicle Symposium, Orlando, FL, USA, 12–17 December 1997. [Google Scholar]
- Maleki, H.; Deng, G.; Anani, A.; Howard, J. Thermal stability studies of binder materials in anodes for lithium-ion batteries. J. Electrochem. Soc. 1999, 146, 3224–3229. [Google Scholar] [CrossRef]
- Chen, C.; Shang, F.; Salameh, M.; Krishnamurthy, M. Challenges and Advancements in Fast Charging Solutions for EVs: A Technological Review. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 695–701. [Google Scholar] [CrossRef]
- 2018 Leaf vs Long Journeys—Can It Take the Heat? Available online: https://cleantechnica.com/2018/07/16/2018-leaf-vs-long-journeys-can-it-take-the-heat/ (accessed on 11 November 2018).
- Pesaran, A.A. Battery thermal management in EVs and HEVs: Issues and solutions. In Proceedings of the Advanced Automotive Battery Conference, Las Vegas, NV, USA, 6–8 February 2001. [Google Scholar]
- 2017 Chevy Bolt Battery Cooling and Gearbox Details. Available online: https://gm-volt.com/2016/01/19/129946/ (accessed on 3 May 2019).
- PCC™ Thermal Management. Available online: https://www.allcelltech.com/testing/index.php/technology/pcc-thermal-management (accessed on 11 November 2018).
- Schweitzer, B.; Wilke, S.; Khateeb, S.; Al-Hallaj, S. Experimental validation of a 0-D numerical model for phase change thermal management systems in lithium-ion batteries. J. Power Sources 2015, 287, 211–219. [Google Scholar] [CrossRef]
- Dusmez, S.; Cook, A.; Khaligh, A. Comprehensive analysis of high quality power converters for level 3 off-board chargers. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–10. [Google Scholar] [CrossRef]
- What is the Difference between AC and DC Charging? Available online: https://charge.net.nz/faq/what-is-the-difference-between-ac-and-dc-charging/ (accessed on 29 March 2019).
- Mi, N.; Sasic, B.; Marshall, J.; Tomasiewicz, S. A novel economical single stage battery charger with power factor correction. In Proceedings of the Eighteenth Annual IEEE Applied Power Electronics Conference and Exposition, APEC ’03., Miami Beach, FL, USA, 9–13 February 2003; pp. 760–763. [Google Scholar] [CrossRef]
- Mortezaei, A.; Abdul-Hak, M.; Simoes, M.G. A Bidirectional NPC-based Level 3 EV Charging System with Added Active Filter Functionality in Smart Grid Applications. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 201–206. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Z.; Cheng, M. An interleaved current-fed bidirectional full-bridge DC/DC converter for on-board charger. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 4376–4381. [Google Scholar] [CrossRef]
- He, P.; Khaligh, A. Comprehensive Analyses and Comparison of 1 kW Isolated DC–DC Converters for Bidirectional EV Charging Systems. IEEE Trans. Transp. Electrif. 2017, 3, 147–156. [Google Scholar] [CrossRef]
- Sahoo, J.K.; Mathew, A.T. Design of a ZCS full – Bridge DC – DC converter for PV based electric vehicle fast charging station. In Proceedings of the 2017 IEEE Region 10 Symposium (TENSYMP), Cochin, India, 14–16 July 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Pool-Mazun, E.; Sandoval, J.J.; Enjeti, P.; Pitel, I.J. A Direct Switch-Mode Three-Phase AC to DC Rectifier with High-Frequency Isolation for Fast EV Battery Chargers. In Proceedings of the 2019 Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019. [Google Scholar]
- Adegbohun, J.; von Jouanne, A.; Lee, K. Autonomous Battery Swapping System and Methodologies of Electric Vehicles. Energies 2019, 12, 667. [Google Scholar] [CrossRef]
- Rezaee, S.; Farjah, E.; Khorramdel, B. Probabilistic Analysis of Plug-In Electric Vehicles Impact on Electrical Grid Through Homes and Parking Lots. IEEE Trans. Sustain. Energy 2013, 4, 1024–1033. [Google Scholar] [CrossRef]
- Dharmakeerthi, C.H.; Mithulananthan, N.; Saha, T.K. Impact of electric vehicle fast charging on power system voltage stability. Int. J. Electr. Power Energy Syst. 2014, 57, 241–249. [Google Scholar] [CrossRef]
- Lucas, A.; Bonavitacola, F.; Kotsakis, E.; Fulli, G. Grid harmonic impact of multiple electric vehicle fast charging. Electr. Power Syst. Res. 2015, 127, 13–21. [Google Scholar] [CrossRef]
- Karakitsios, I.; Karfopoulos, E.; Hatziargyriou, N. Impact of dynamic and static fast inductive charging of electric vehicles on the distribution network. Electr. Power Syst. Res. 2016, 140, 107–115. [Google Scholar] [CrossRef]
- Han, S.; Han, S.; Sezaki, K. Development of an Optimal Vehicle-to-Grid Aggregator for Frequency Regulation. IEEE Trans. Smart Grid 2010, 1, 65–72. [Google Scholar] [CrossRef]
- He, Y.F.; Venkatesh, B.; Guan, L. Optimal Scheduling for Charging and Discharging of Electric Vehicles. IEEE Trans. Smart Grid 2012, 3, 1095–1105. [Google Scholar] [CrossRef]
- Hajforoosh, S.; Masoum, M.A.S.; Islam, S.M. Real-time charging coordination of plug-in electric vehicles based on hybrid fuzzy discrete particle swarm optimization. Electr. Power Syst. Res. 2015, 128, 19–29. [Google Scholar] [CrossRef]
- Xie, S.L.; Zhong, W.F.; Xie, K.; Yu, R.; Zhang, Y. Fair Energy Scheduling for Vehicle-to-Grid Networks Using Adaptive Dynamic Programming. IEEE Trans. Neural Net. Learn. Syst. 2016, 27, 1697–1707. [Google Scholar] [CrossRef]
- Heydt, G.T. The Next Generation of Power Distribution Systems. IEEE Trans. Smart Grid 2010, 1, 225–235. [Google Scholar] [CrossRef]
- Islam, M.S.; Mithulananthan, N.; Bhumkittipich, K. Feasibility of PV and battery energy storage based EV charging in different charging stations. In Proceedings of the 2016 13th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Chiang Mai, Thailand, 28 June–1 July 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Mehta, R.; Srinivasan, D.; Khambadkone, A.M.; Yang, J.; Trivedi, A. Smart Charging Strategies for Optimal Integration of Plug-In Electric Vehicles Within Existing Distribution System Infrastructure. IEEE Trans. Smart Grid 2018, 9, 299–312. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of the Impact of Vehicle-to-Grid Technologies on Distribution Systems and Utility Interfaces. IEEE Trans. Power Electron. 2013, 28, 5673–5689. [Google Scholar] [CrossRef]
- Kempton, W.; Tomic, J. Vehicle-to-grid power fundamentals: Calculating capacity and net revenue. J. Power Sources 2005, 144, 268–279. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.T.; Wu, D.; Gao, S. Opportunities and Challenges of Vehicle-to-Home, Vehicle-to-Vehicle, and Vehicle-to-Grid Technologies. Proc. IEEE 2013, 101, 2409–2427. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| C-rate | Time |
|---|---|
| 5C | 12 min |
| 2C | 30 min |
| 1C | 1 h |
| 0.5C | 2 h |
| 0.2C | 5 h |
| 0.1C | 10 h |
| 0.05C | 20 h |
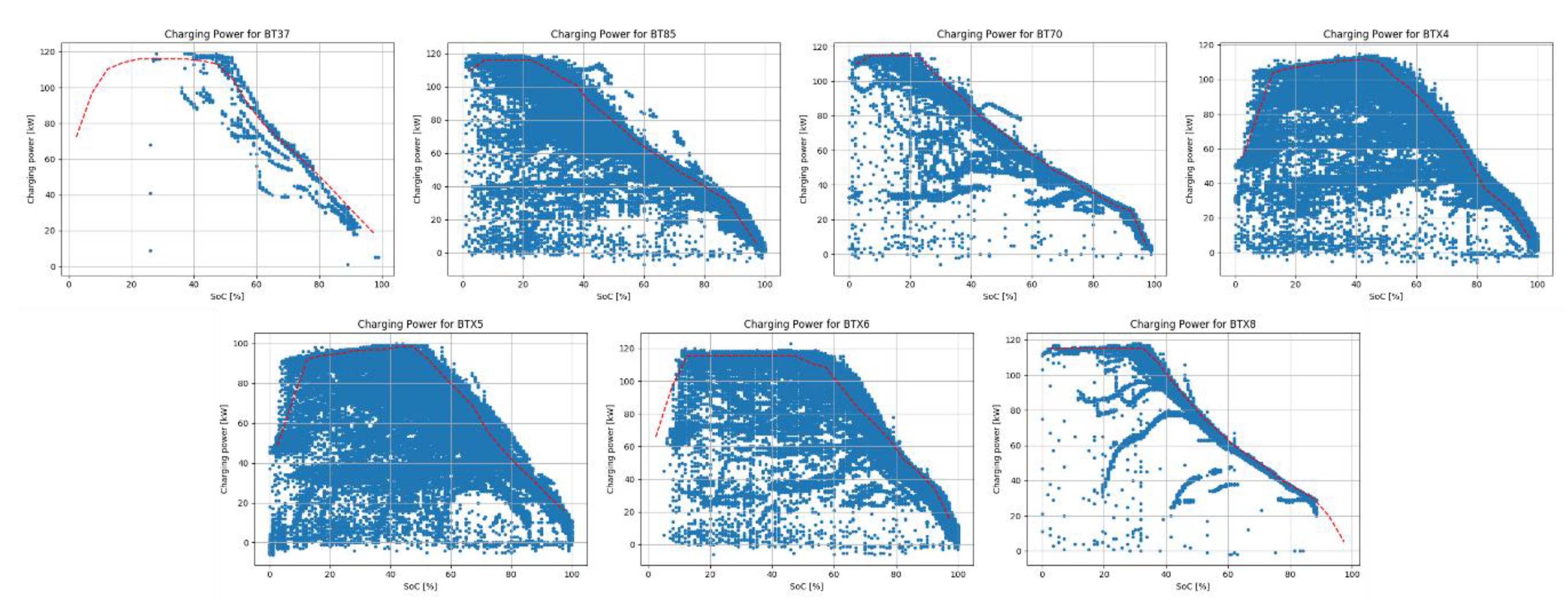
| Battery Code | Tesla Model | Estimated Usable Capacity (kWh) | 10 kWh → 50 kWh Charge Time (min) |
|---|---|---|---|
| BT37 | 3 Long Range | 72.8 | 23 |
| BT70 | S70 | 65.7 | 33 |
| BT85 | S85 | 73.4 | 27 |
| BTX4 | S/X90 | 79.8 | 23 |
| BTX5 | S/X75 | 71.6 | 27 |
| BTX6 | S/X100 | 95.7 | 20 |
| BTX8 | Rare S/X75 | 25 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Collin, R.; Miao, Y.; Yokochi, A.; Enjeti, P.; von Jouanne, A. Advanced Electric Vehicle Fast-Charging Technologies. Energies 2019, 12, 1839. https://doi.org/10.3390/en12101839
Collin R, Miao Y, Yokochi A, Enjeti P, von Jouanne A. Advanced Electric Vehicle Fast-Charging Technologies. Energies. 2019; 12(10):1839. https://doi.org/10.3390/en12101839
Chicago/Turabian StyleCollin, Ryan, Yu Miao, Alex Yokochi, Prasad Enjeti, and Annette von Jouanne. 2019. "Advanced Electric Vehicle Fast-Charging Technologies" Energies 12, no. 10: 1839. https://doi.org/10.3390/en12101839
APA StyleCollin, R., Miao, Y., Yokochi, A., Enjeti, P., & von Jouanne, A. (2019). Advanced Electric Vehicle Fast-Charging Technologies. Energies, 12(10), 1839. https://doi.org/10.3390/en12101839