Smoothly Transitive Fixed Frequency Hysteresis Current Control Based on Optimal Voltage Space Vector

 and
and 
Abstract
:1. Introduction
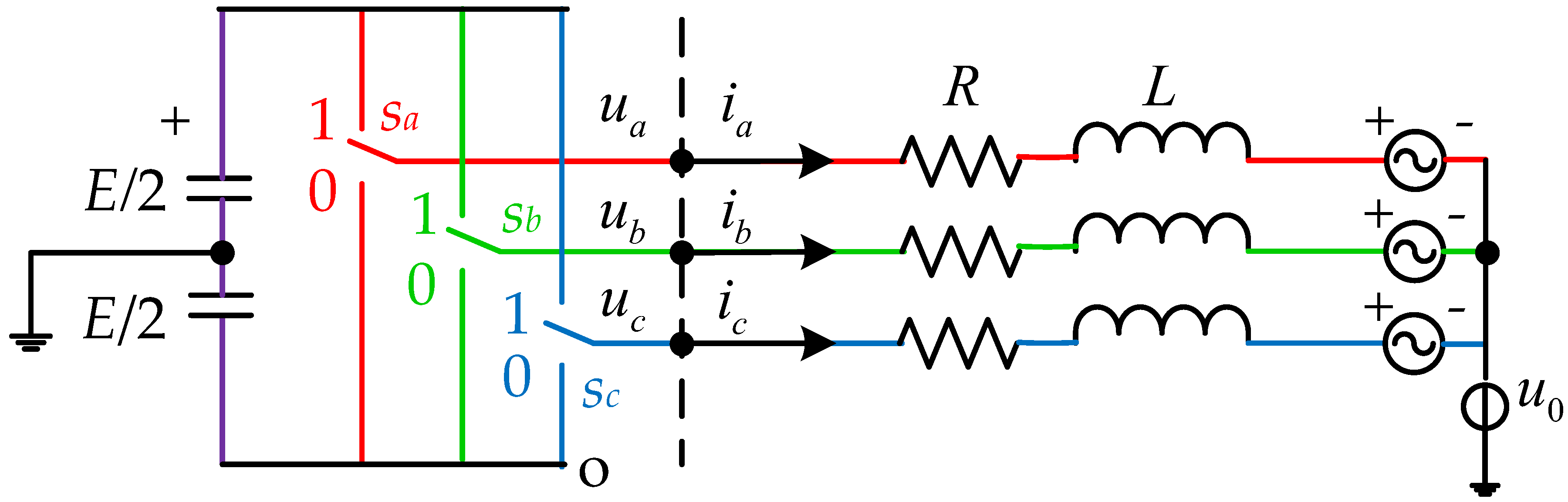
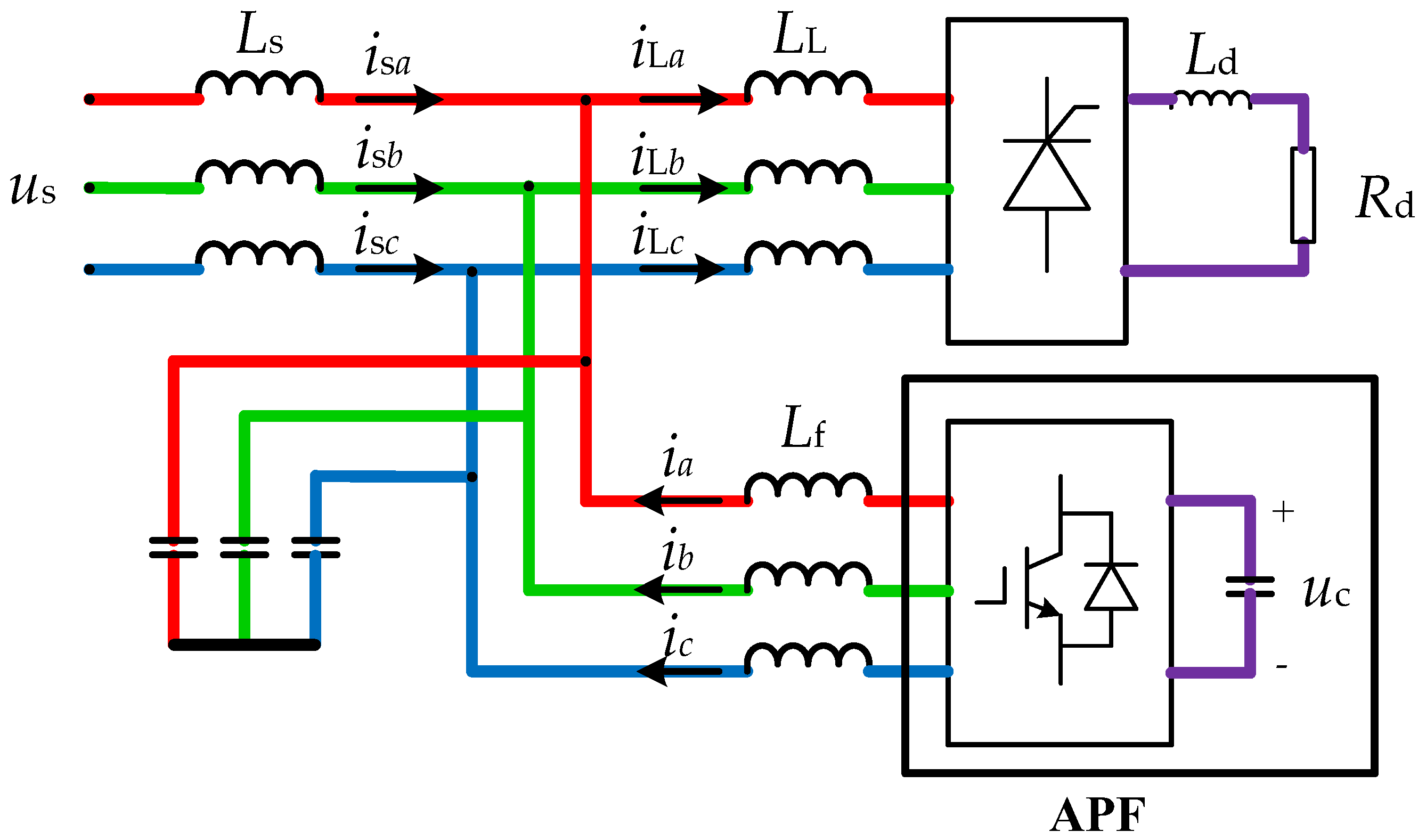
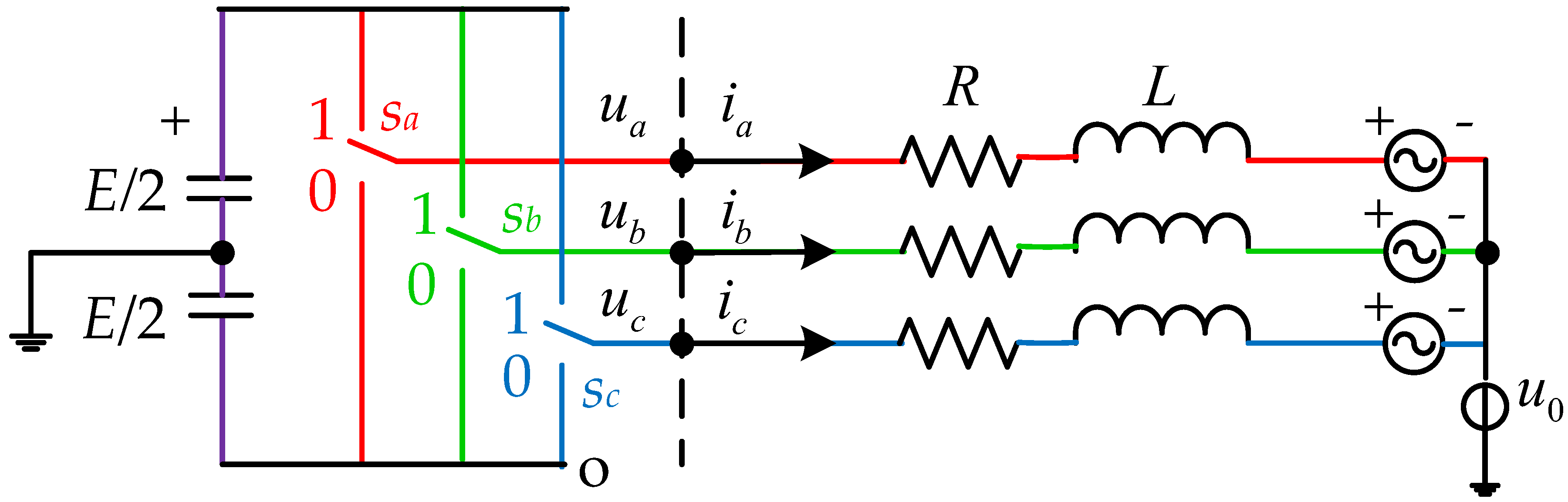
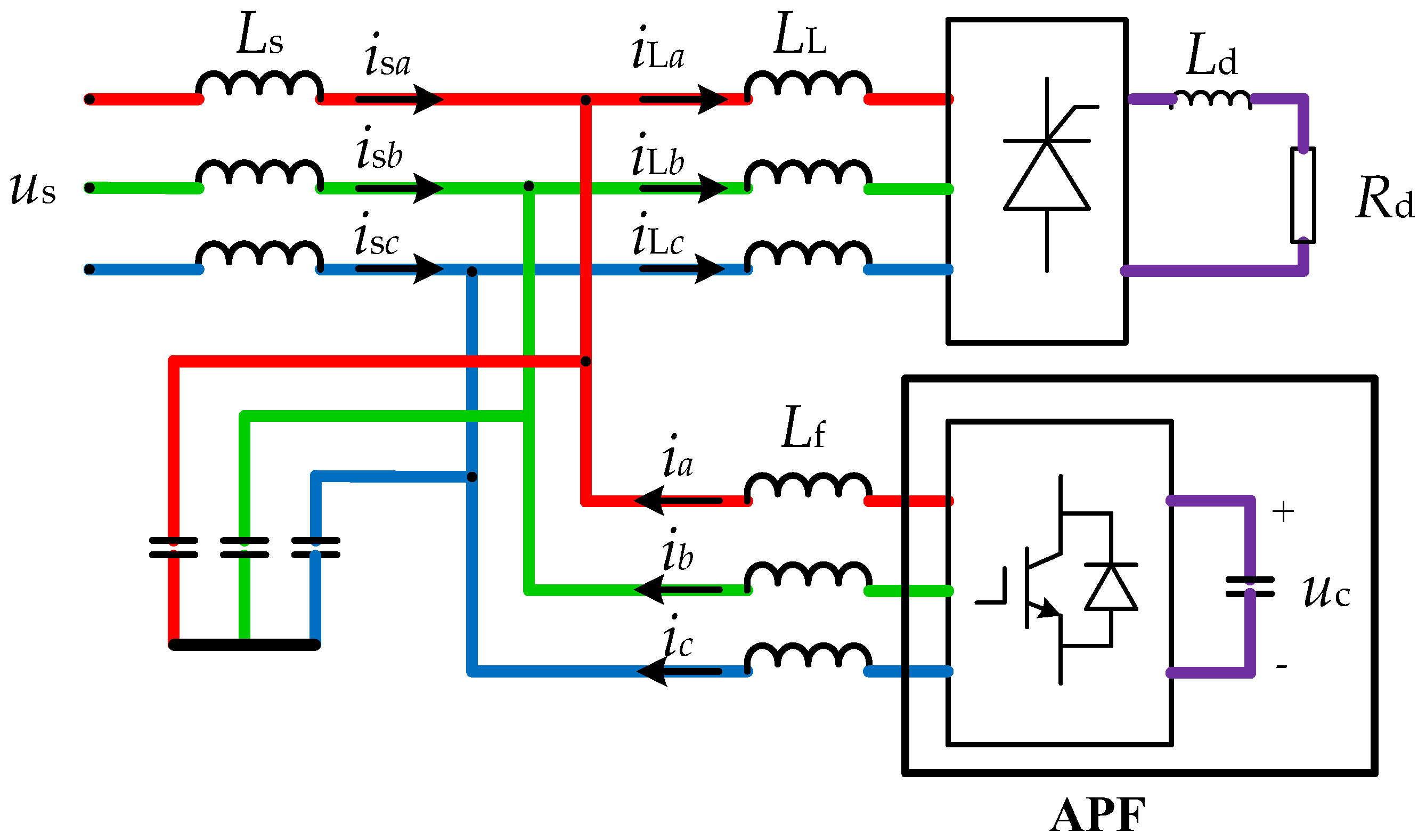
- The paper considers an APF in a three-phase-three-wire power system, in which FHCC is developed instead of the one given by [32,33,34]. Under such a configuration, the voltage between neutral point and dc-link midpoint of the APF results in a strong control coupling of three-phase, which has a dramatic impact on regulation of hysteresis bandwidth and fixed frequency. Hence phase-to-phase decoupling is implemented to eliminate the voltage, such that the two phase-to-phase current errors can be independently controlled by two switches with the third switch being a constant;
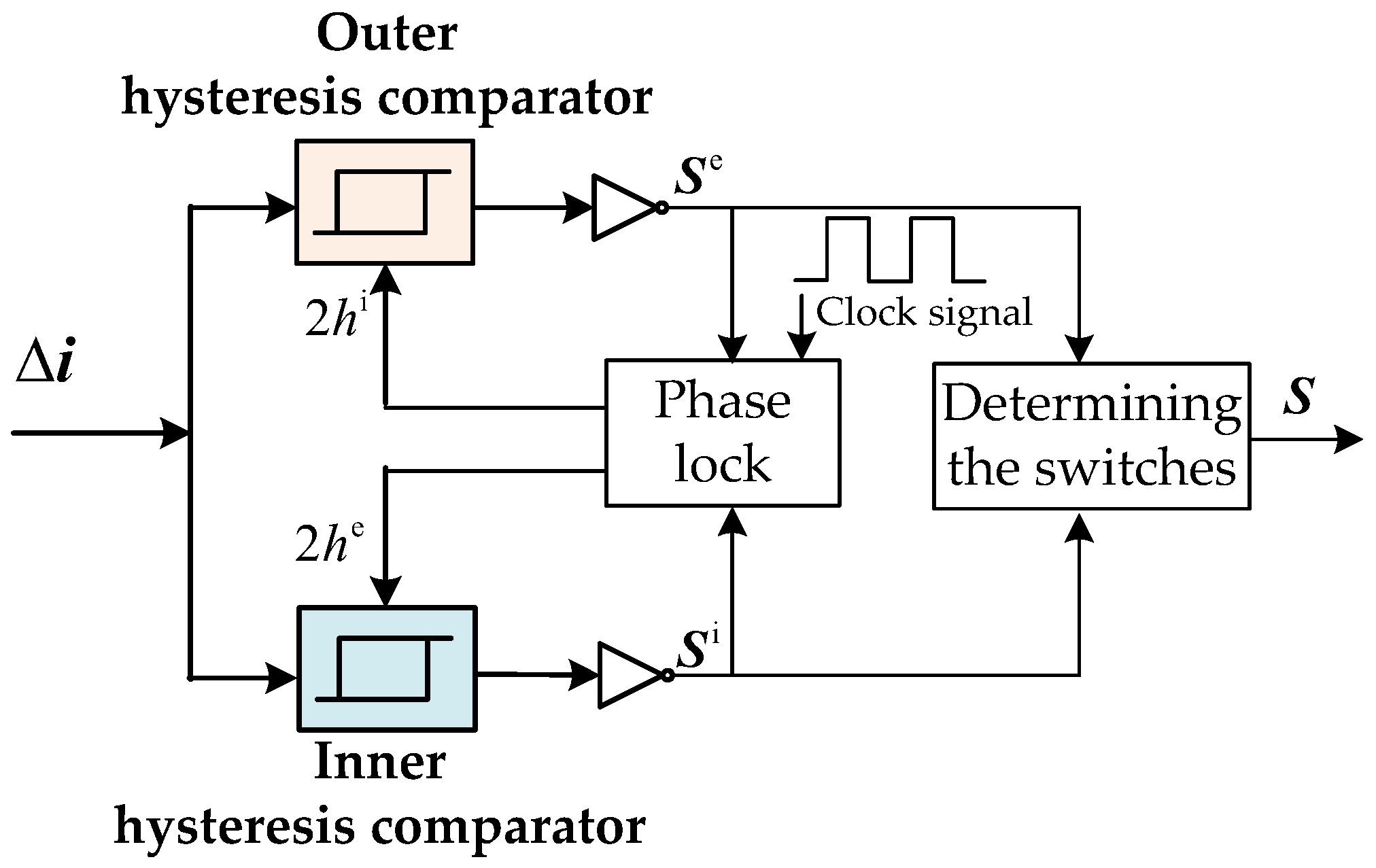
- Compared to [33,34], an improved approach of variable hysteresis bandwidth is presented in this paper, of which the midpoint of switch signals in the state of 0 is synchronized to the clock pulse with a constant frequency. Meanwhile, the equation is given to calculate the hysteresis bandwidth in the next period according to that in the current period. With this approach, fixed frequency and regulation of switch phases can be obtained simultaneously, such that the switching frequency can be constant while the uncontrollable phase-to-phase current error can be reduced greatly.
- A flexible division of the voltage-space-vector diagram is developed to divide the original voltage-space-vectors diagram into six sub-regions, upon which the control strategies under mode 0 and mode 1 can be switched alternately. As a result, a smooth transition can be realized while the inherent weakness of S-FHCC can be avoided, e.g., the control strategies will be switched only if current errors exceed the limit of the outer hysteresis bandwidth. The switching is far smoother with higher control accuracy and smaller current errors in ST-FHCC than those in S-FHCC.
2. Switching Fixed Frequency Hysteresis Current Control (S-FHCC)
2.1. Active Power Filter (APF) Model
2.2. S-FHCC and Its Weakness
3. Fixed Swithcing Frequency Based on Optimal Voltage Space Vector (OVSV)
4. Smoothly Transitive Fixed-Frequency Hysteresis Current Control (ST-FHCC)
4.1. Flexible Division of Voltage-Space-Vector Diagram
4.2. Switching of the Control Strategies in S-FHCC
4.3. Smooth Switching of the Control Strategies in ST-FHCC
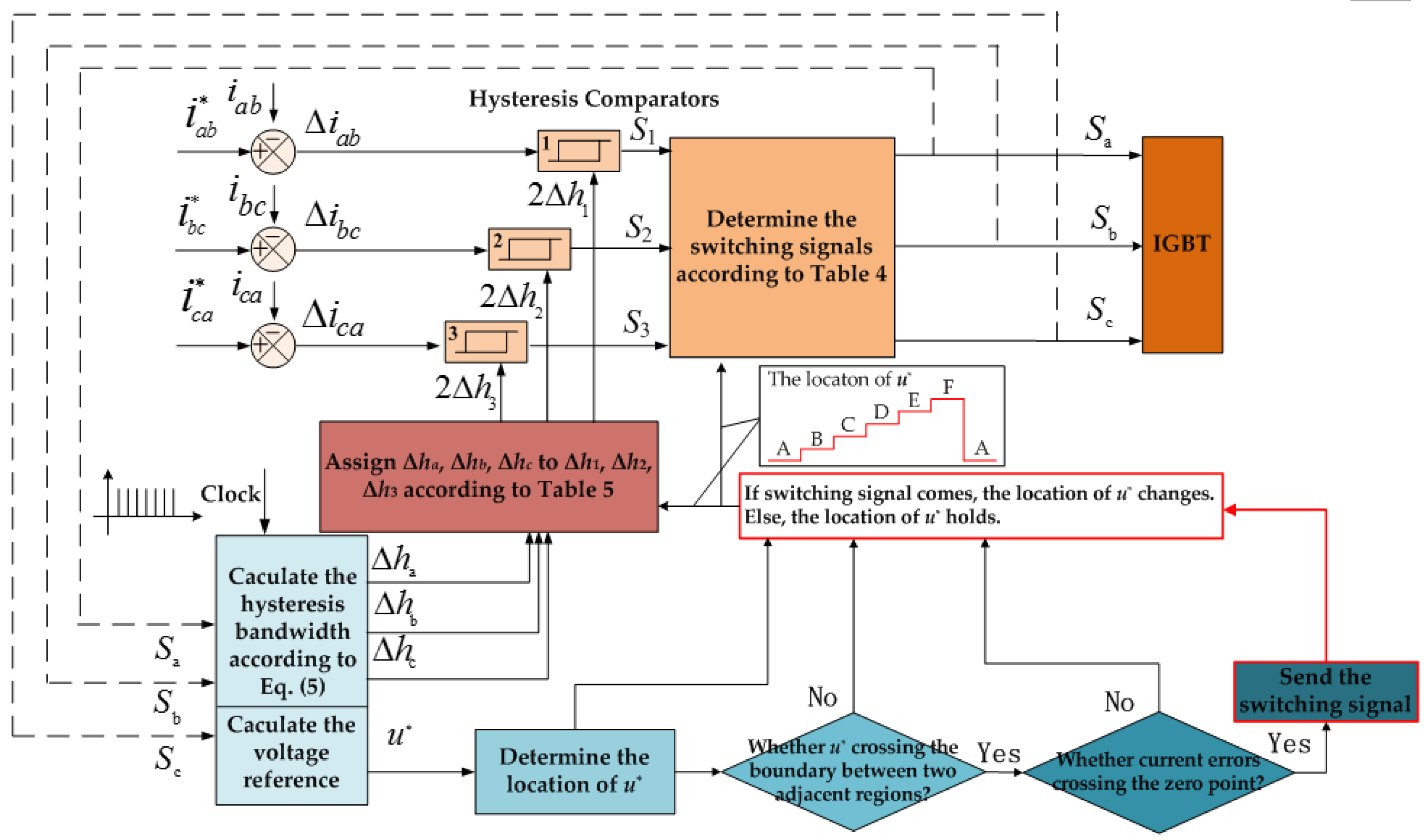
4.4. Detailed Procedure of ST-FHCC
5. Case Studies
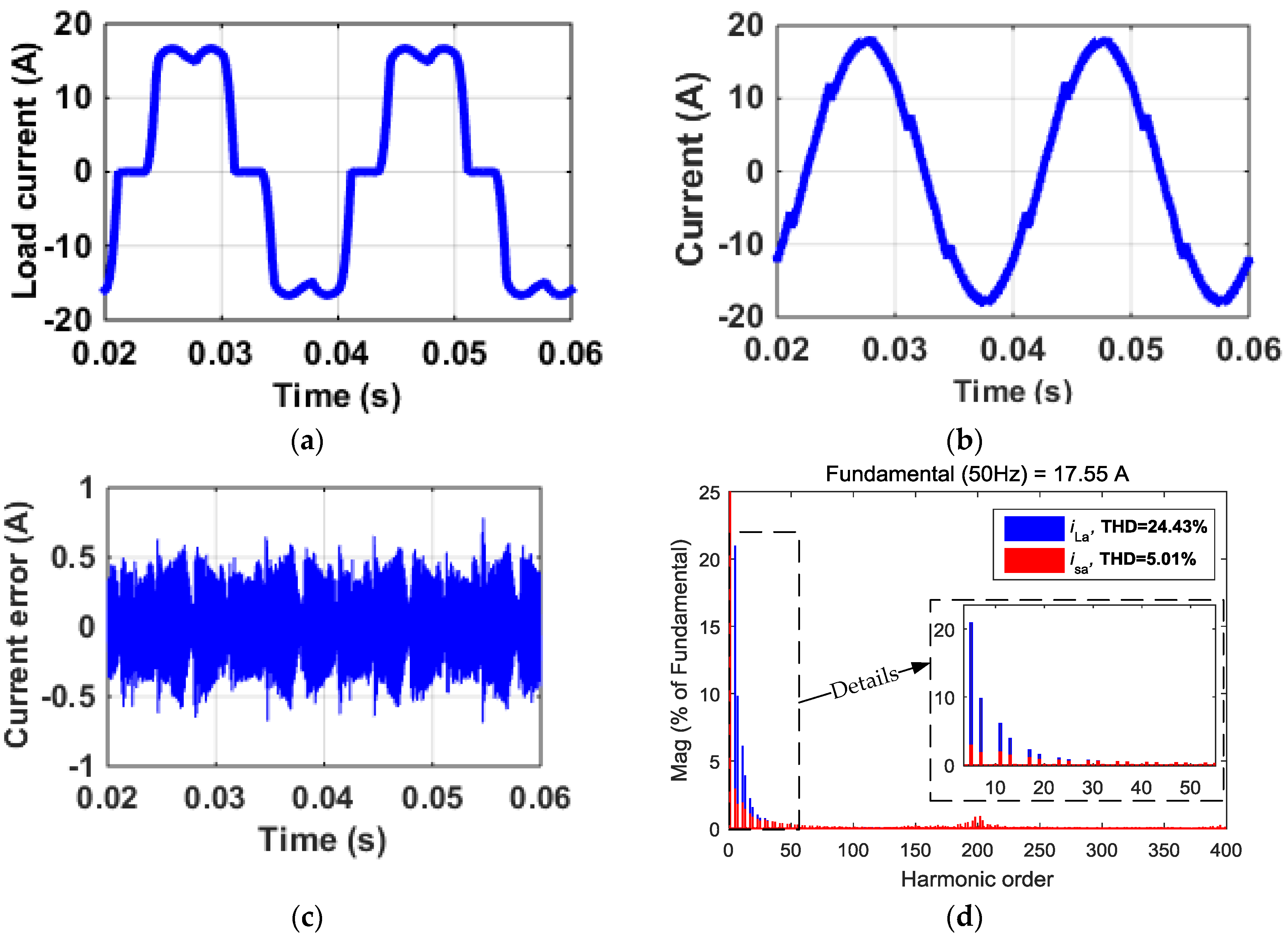
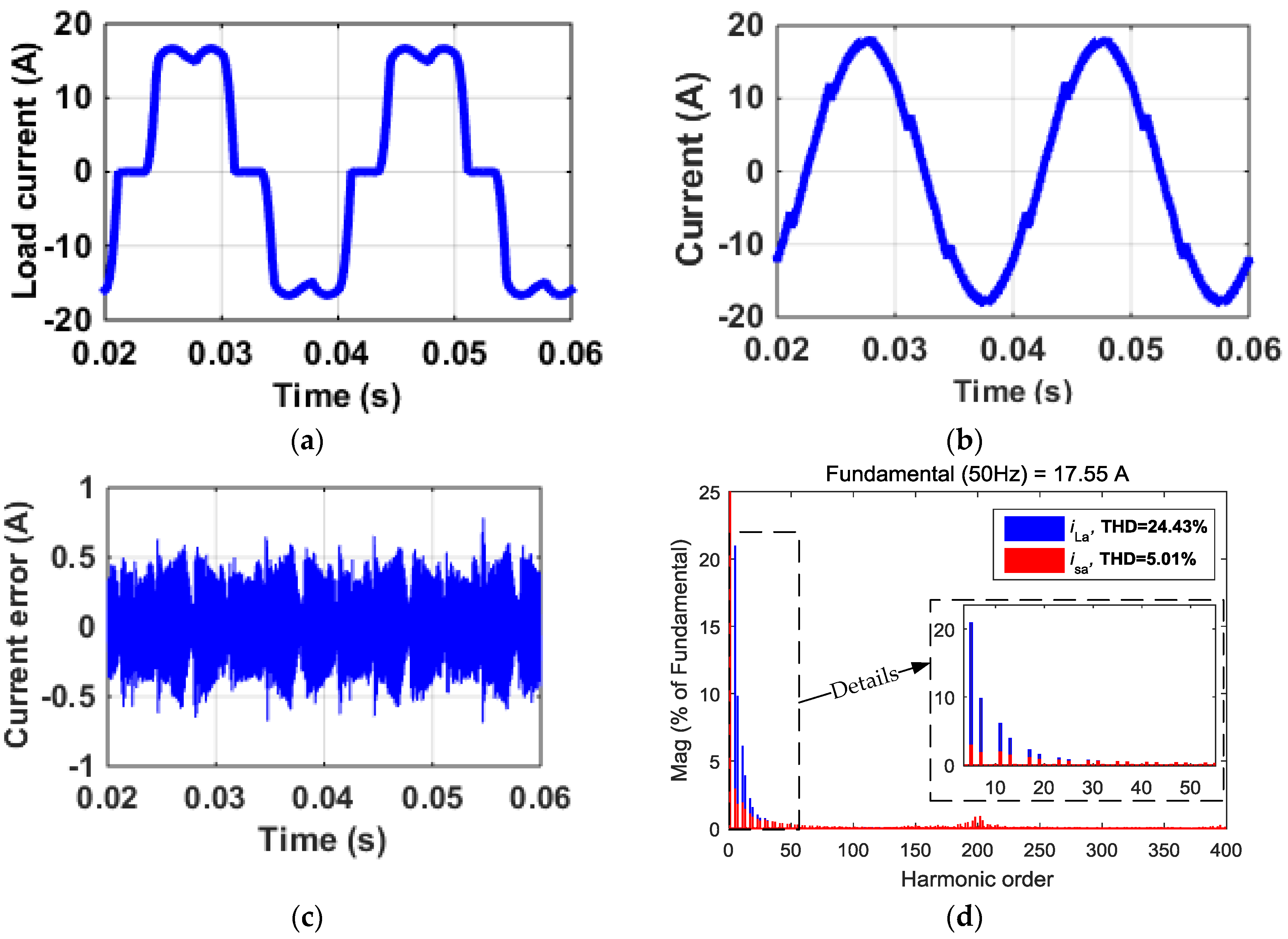
5.1. The Effect of Harmonics Compensation in ST-FHCC
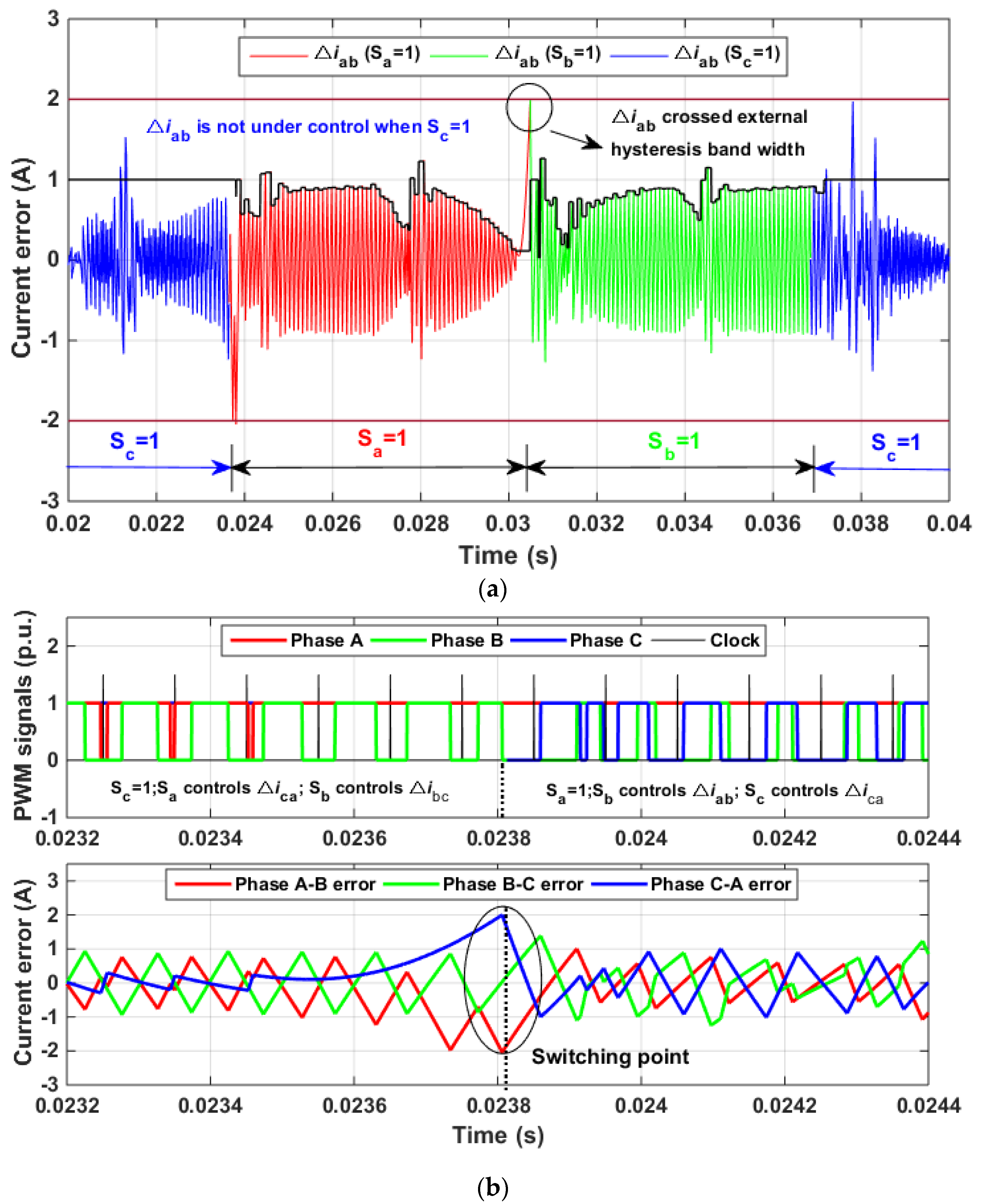
5.2. The Performance of the Current Errors in S-FHCC
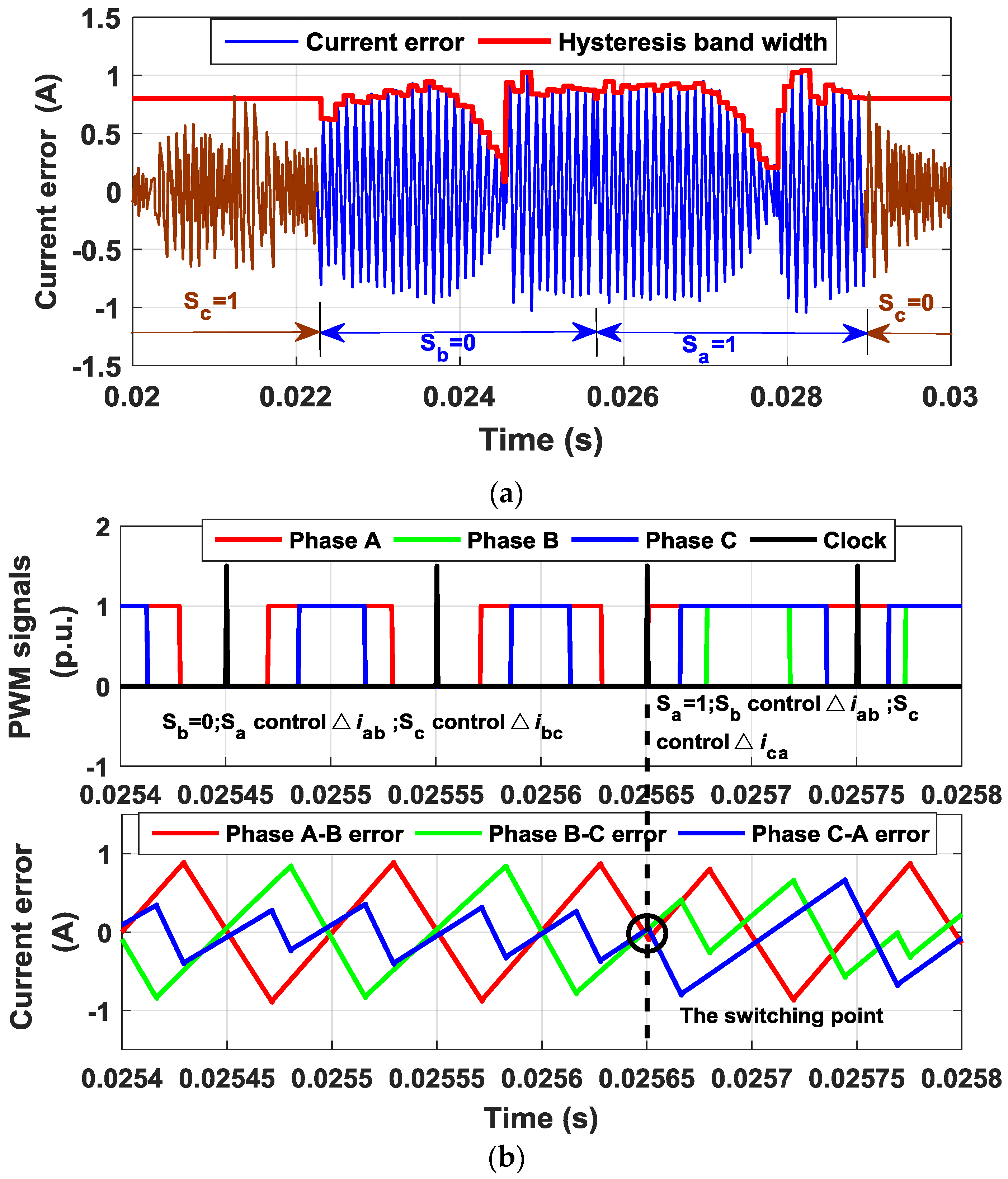
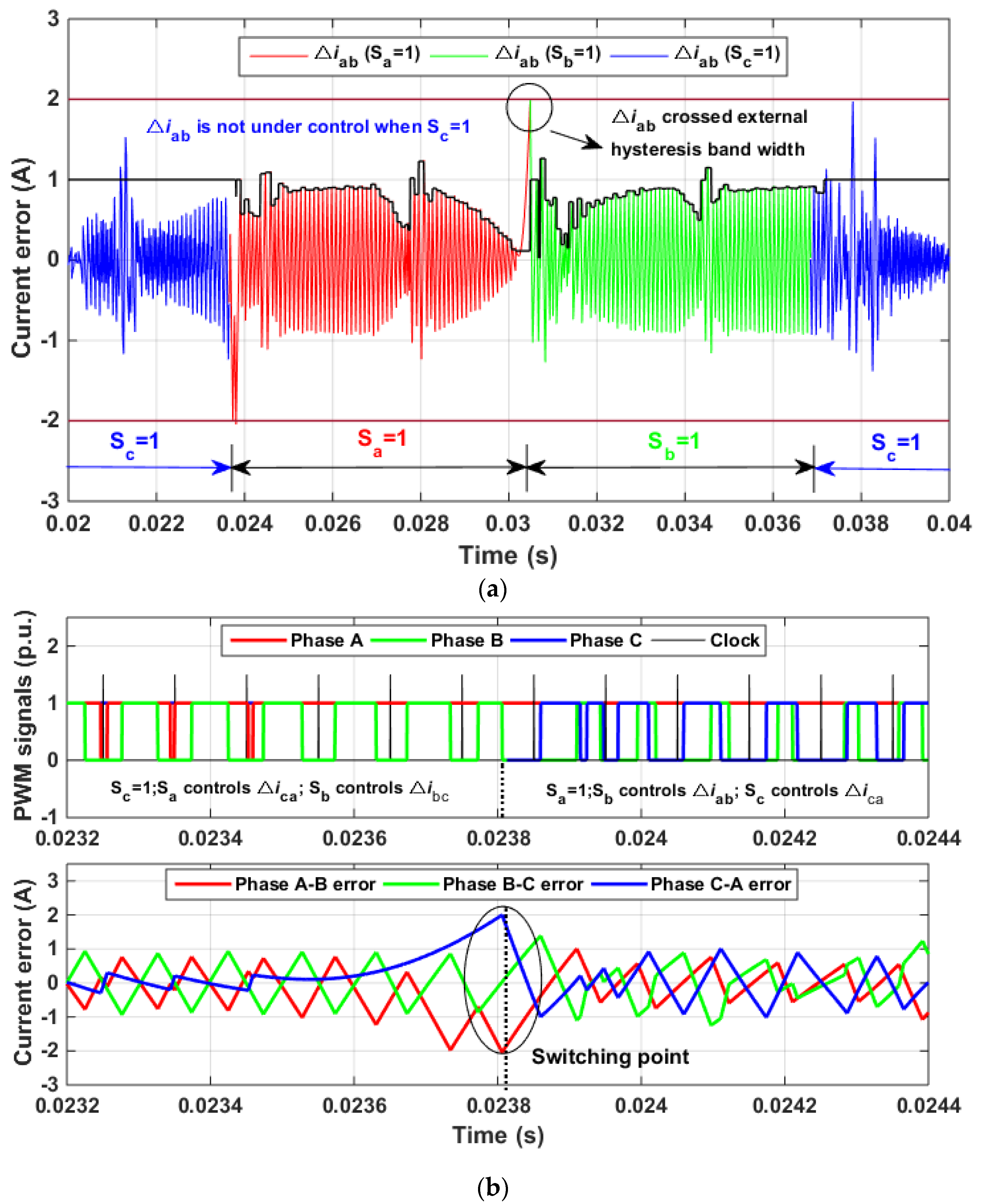
5.3. The Performance of the Current Errors in ST-FHCC
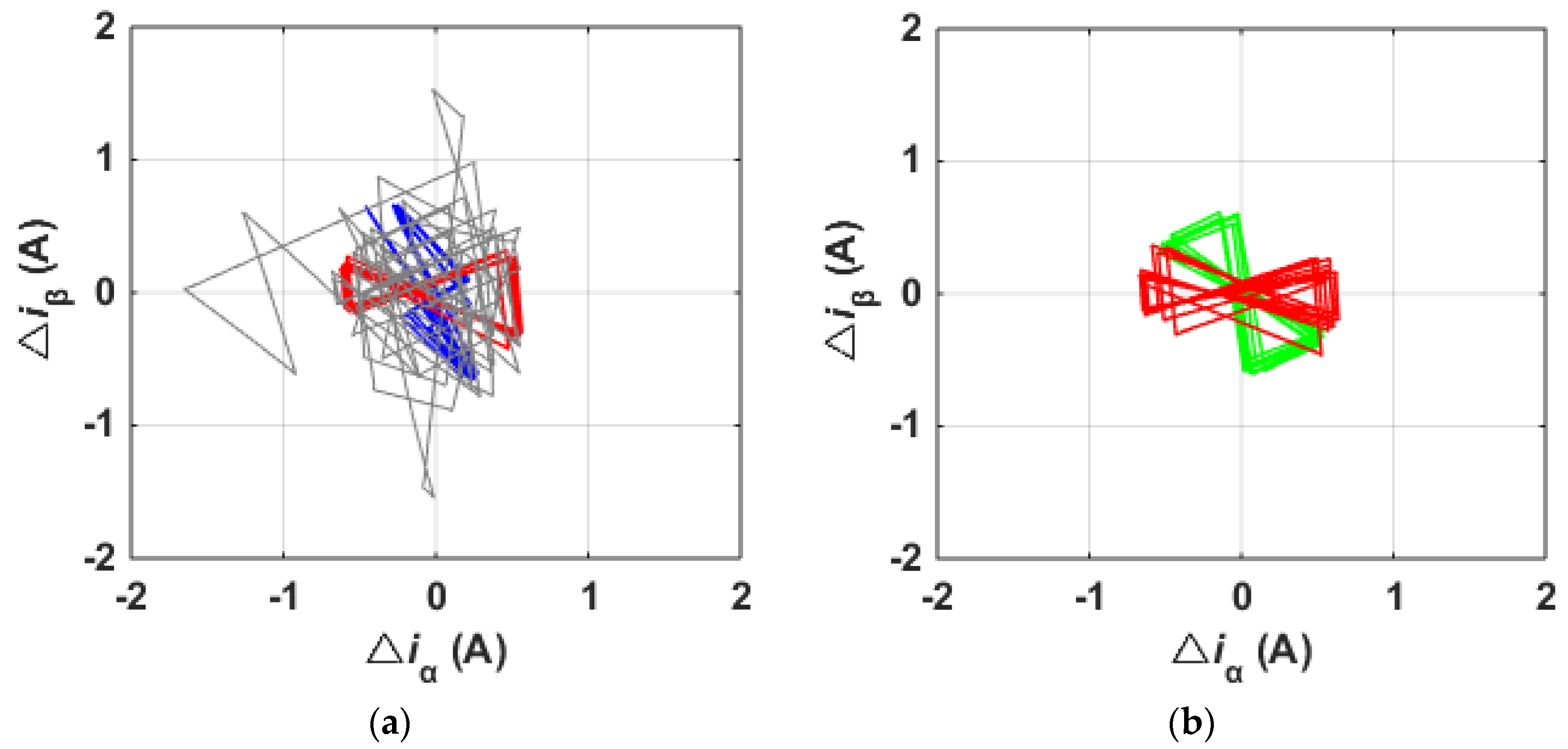
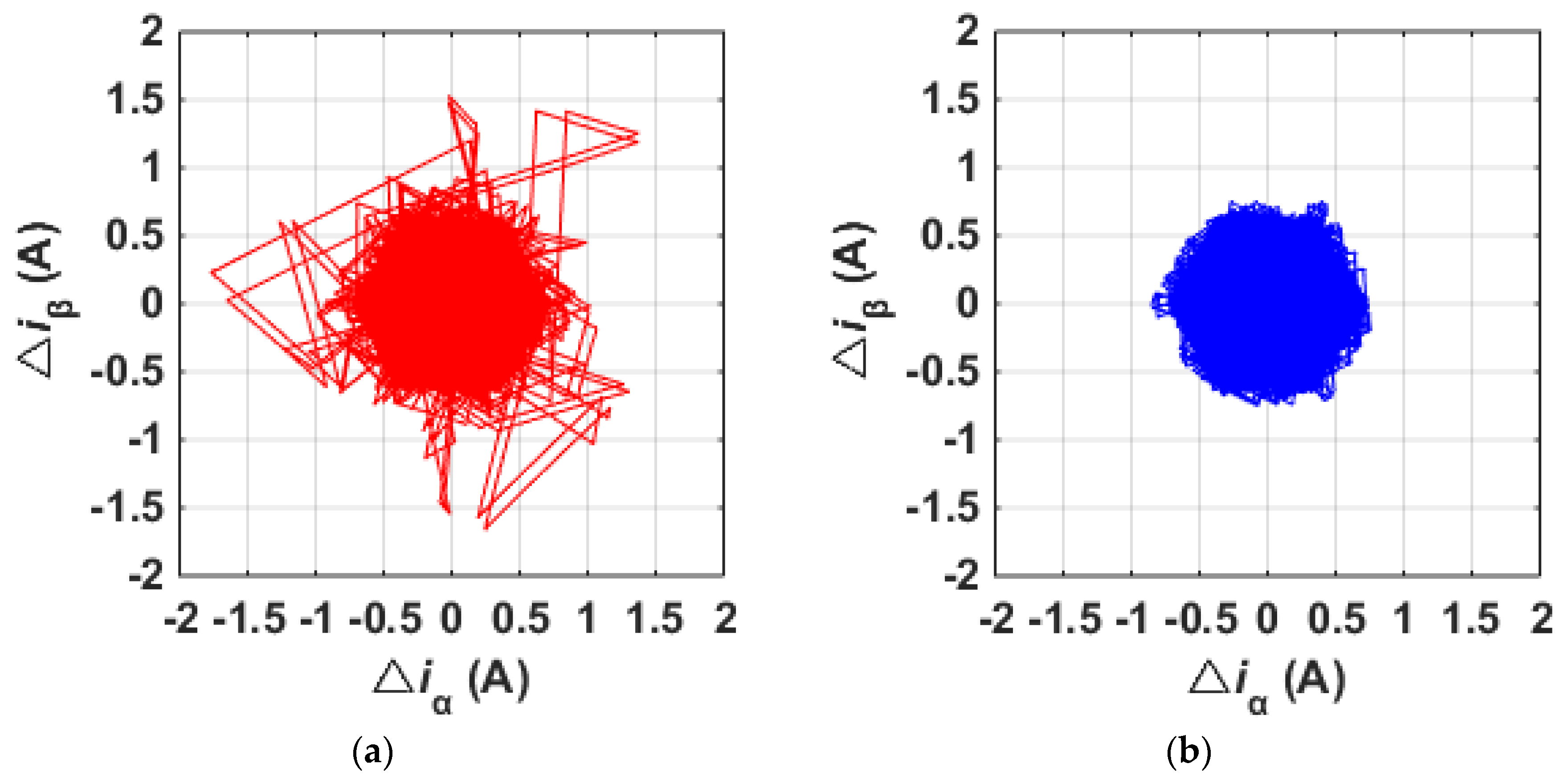
5.4. The Trajectories of Current Errors by S-FHCC and ST-FHCC
6. Discussions
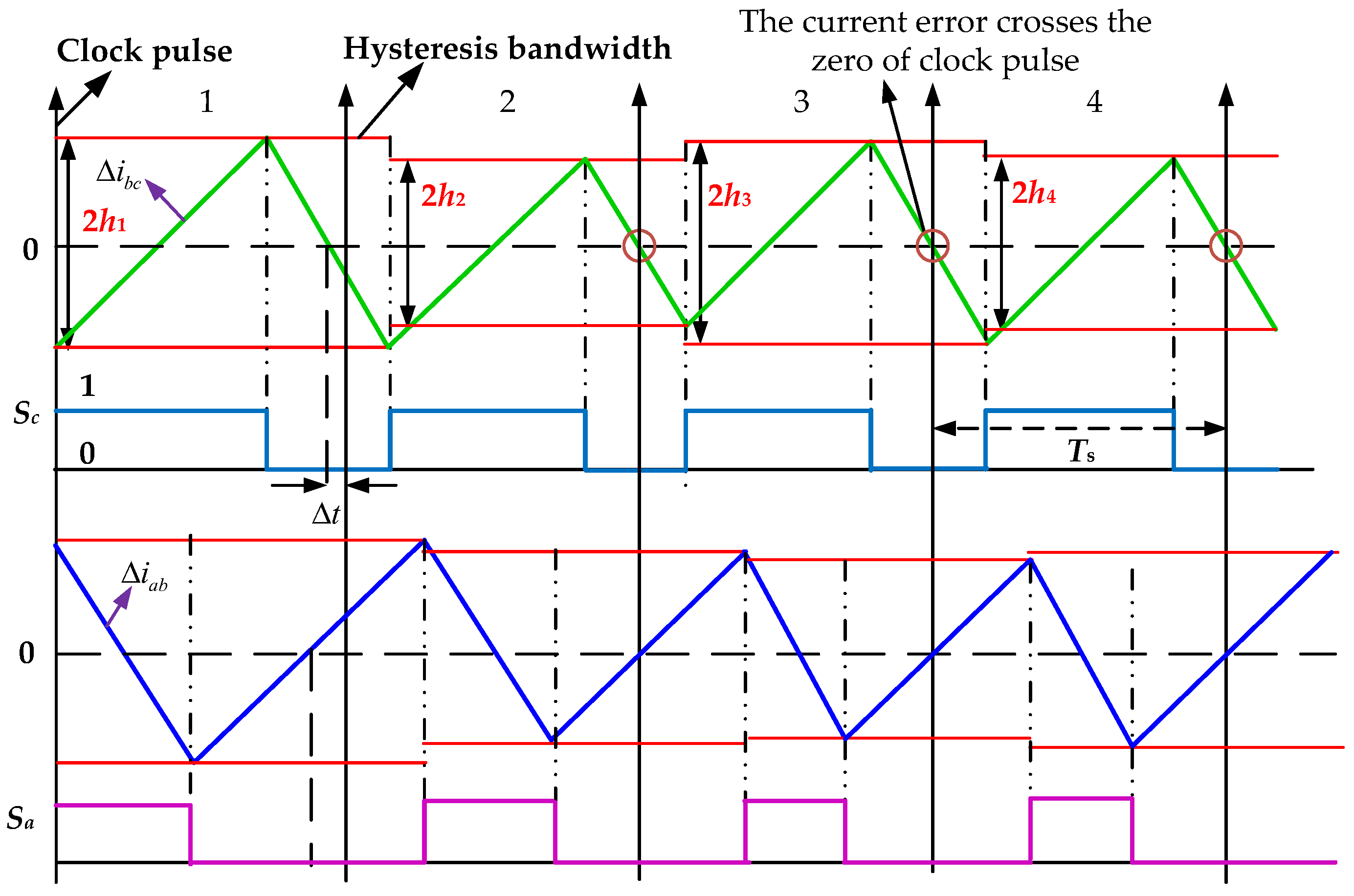
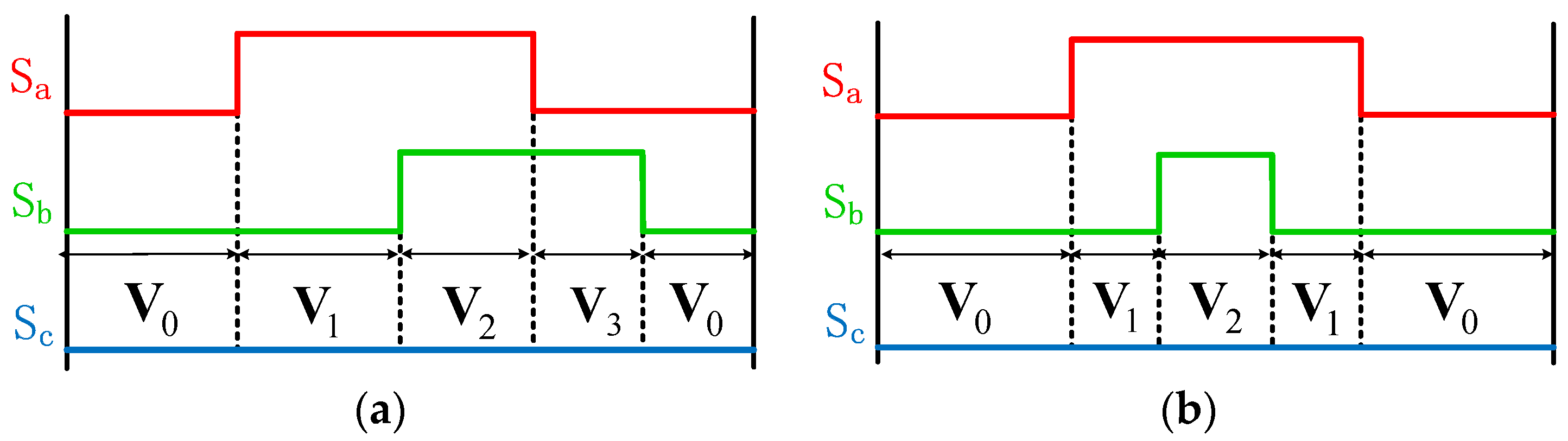
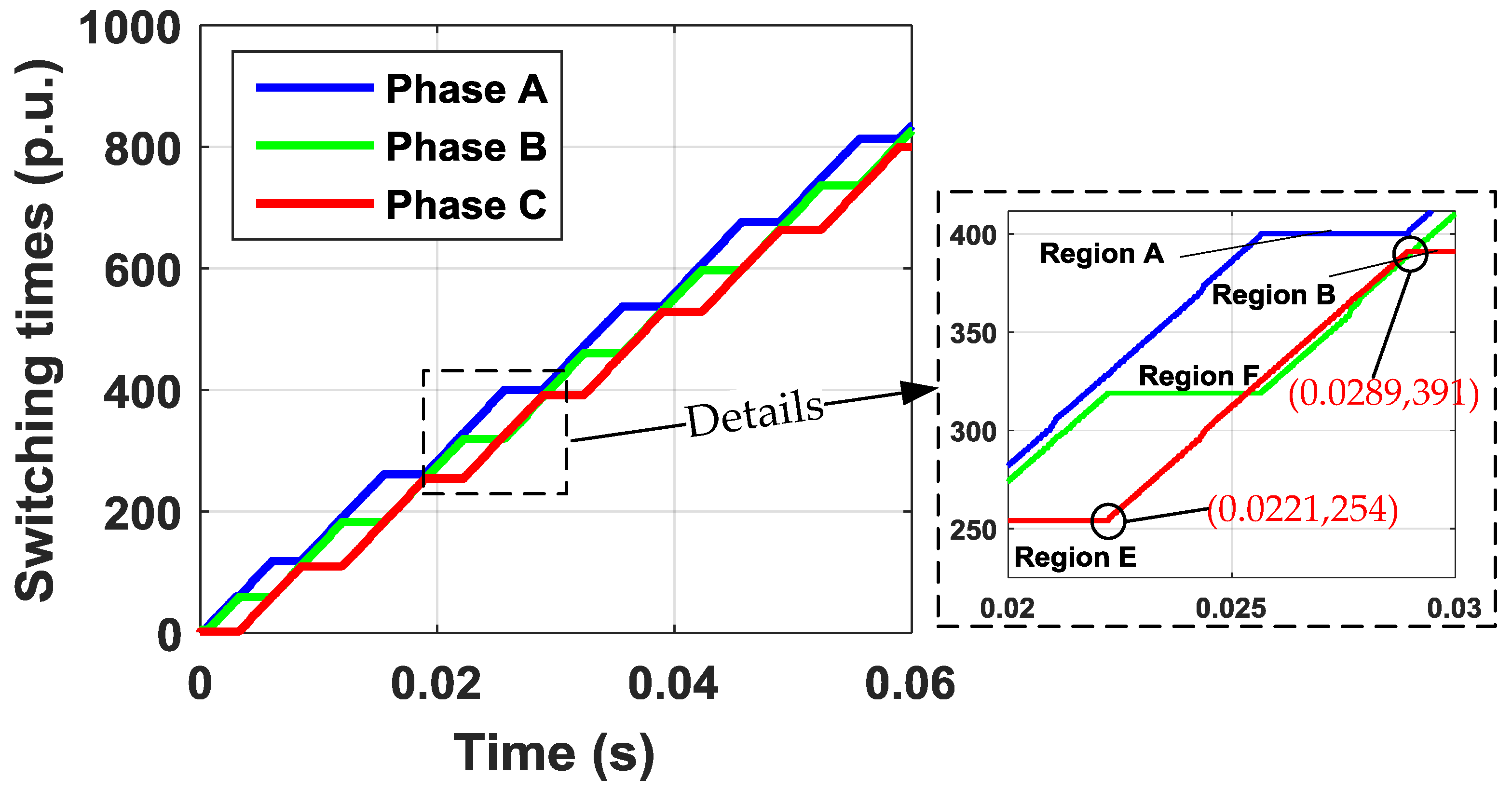
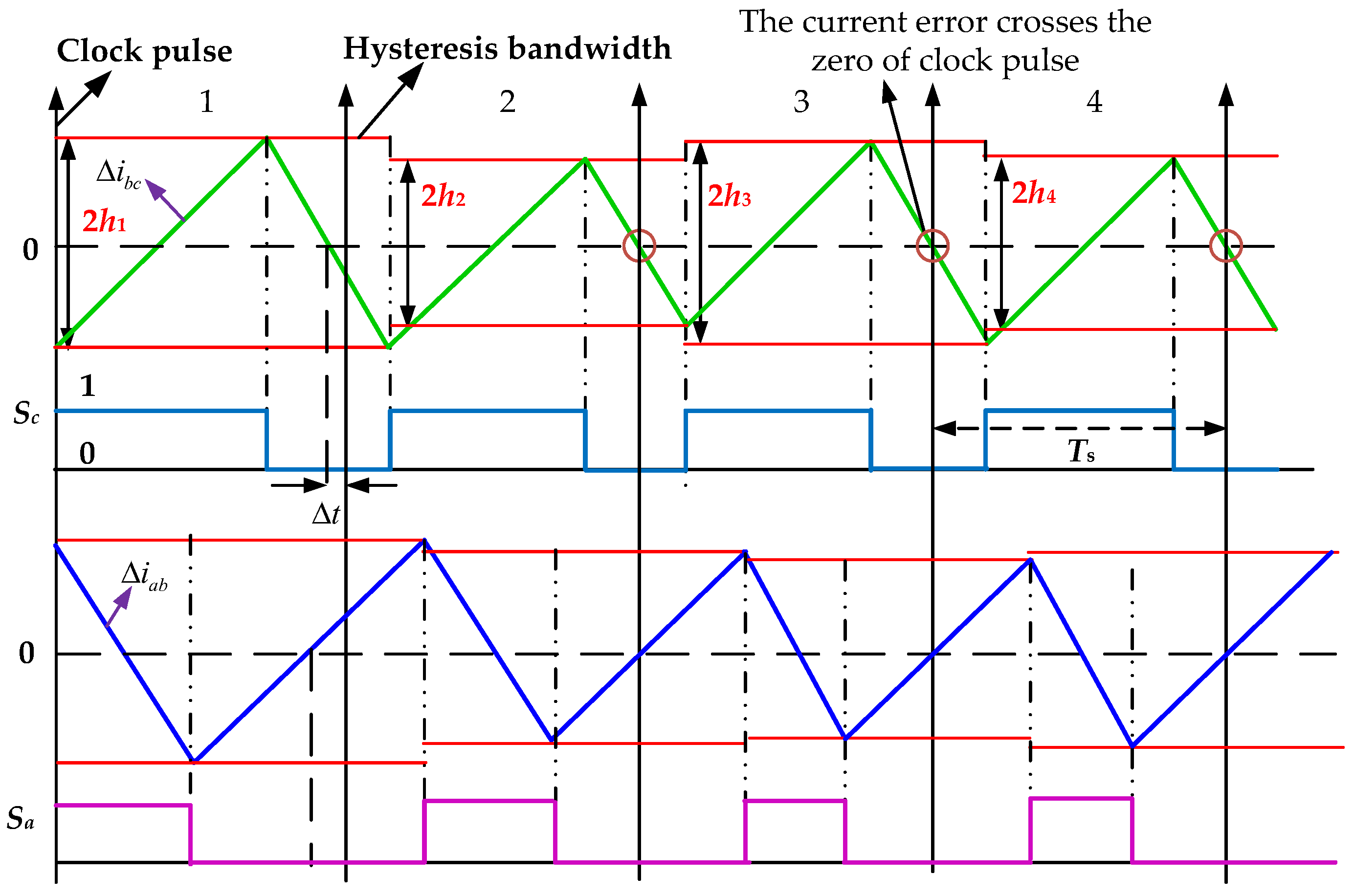
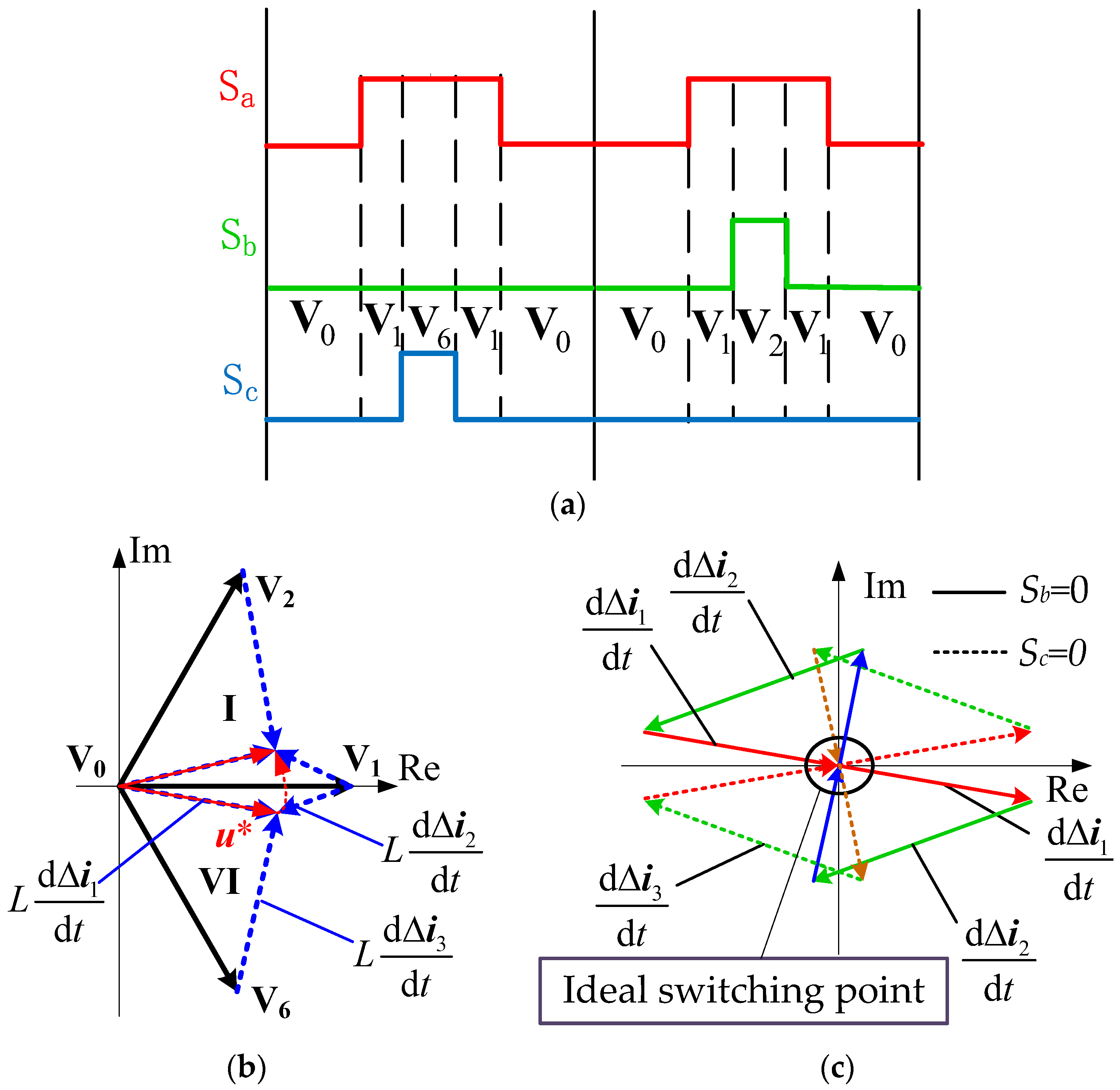
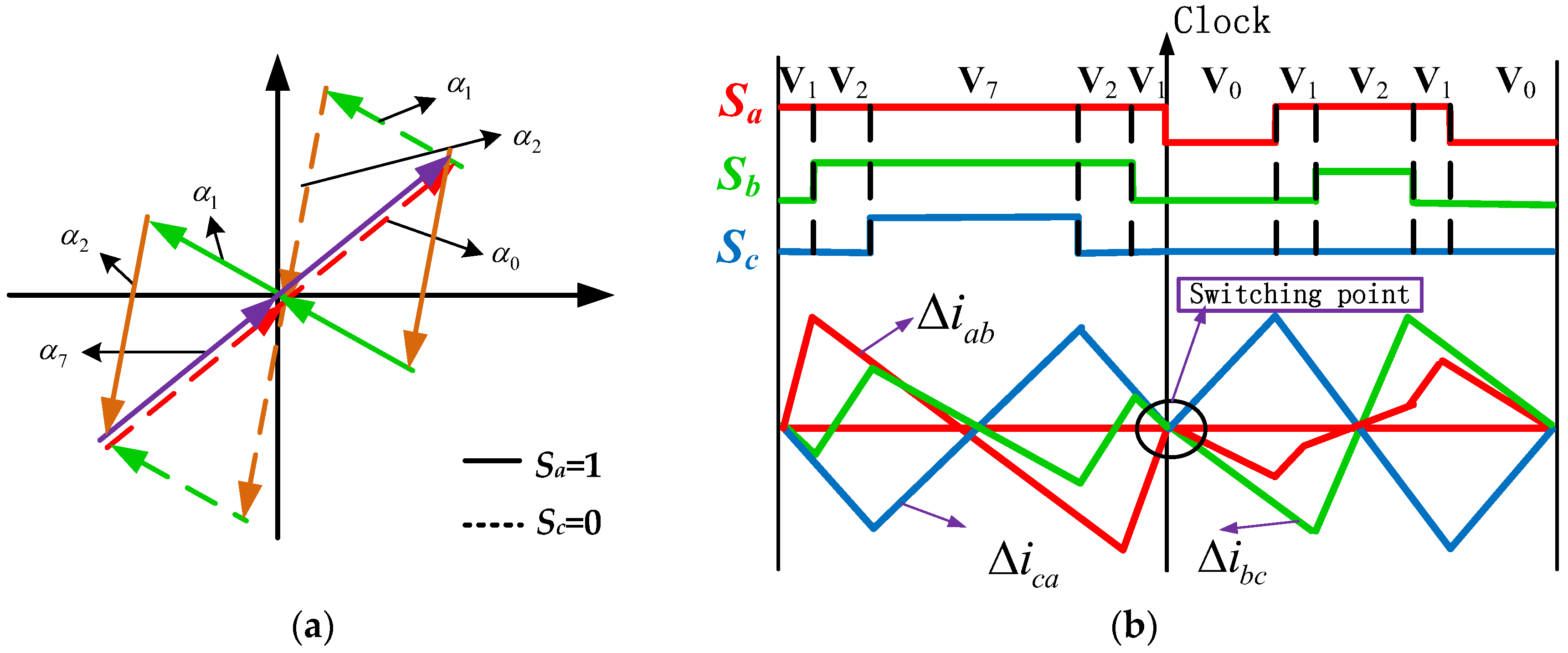
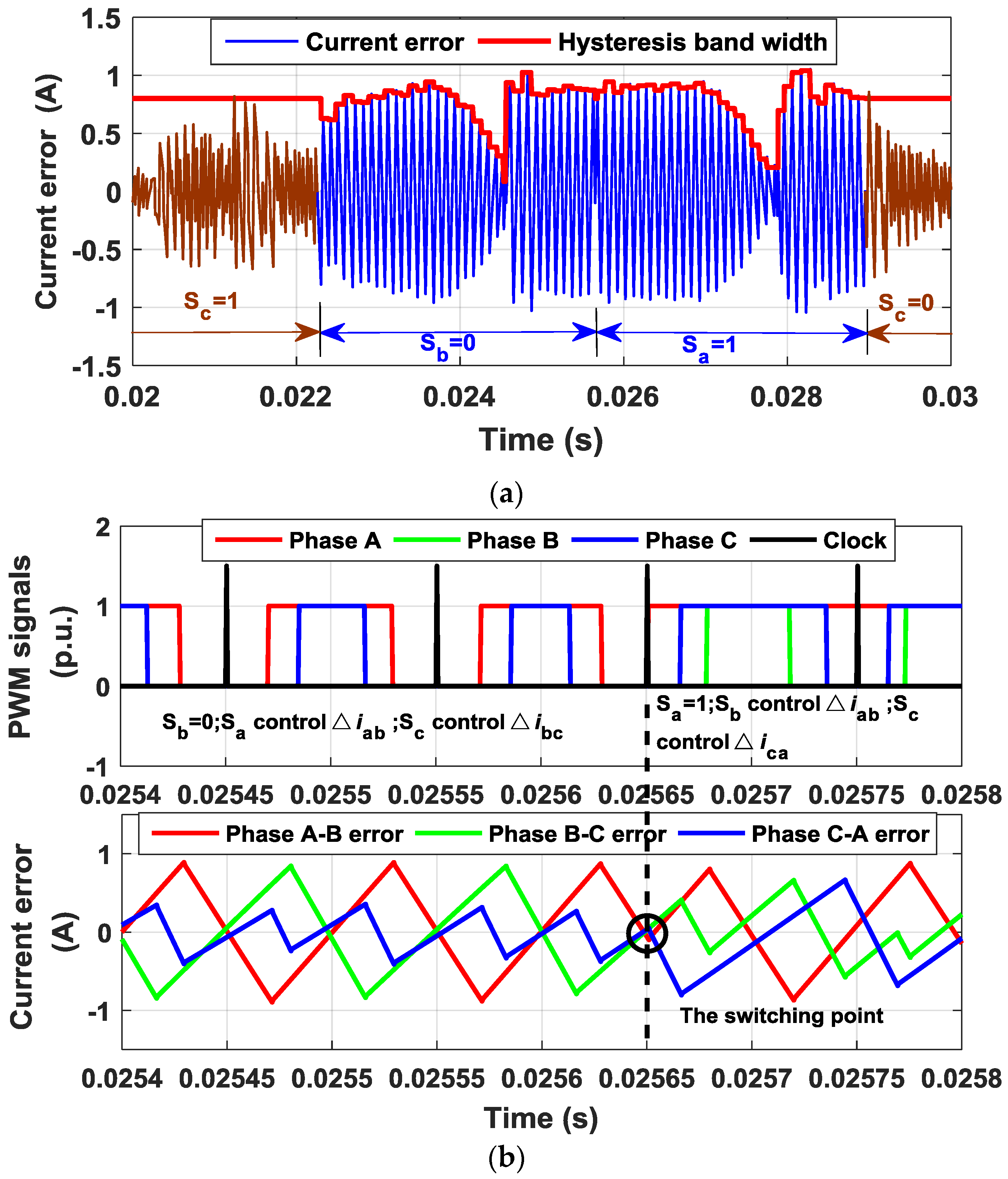
- Note that the proposed approach of variable hysteresis bandwidth is different from the conventional one, which is derived from a simplified single-phase model of a power system with APF [32,33,34]. In the ST-FHCC, the hysteresis bandwidth in the next switching period is derived from the hysteresis bandwidth in the current period according to Equation (5), which is obtained in a way that the midpoint of switch signals in the state of 0 is accurately synchronized to the clock pulse with a constant frequency, which can simultaneously realize a fixed frequency and a regulation of switch phases. In other words, two controllable current errors controlled by two switches will cross the zero point of the clock pulse accurately. As a result, the two operated switches will always operate twice during two clock pulses. Hence, the switching period will be equal to that of the clock pulse. Besides, the phases of two controllable current errors will be opposite while the two corresponding switches will be symmetrical with the switch phases regulated, as depicted in Figure 5. Since Δiab + Δibc + Δica = 0, the uncontrollable current error will decrease dramatically. In addition, the operated voltage-space-vectors will all be optimal.
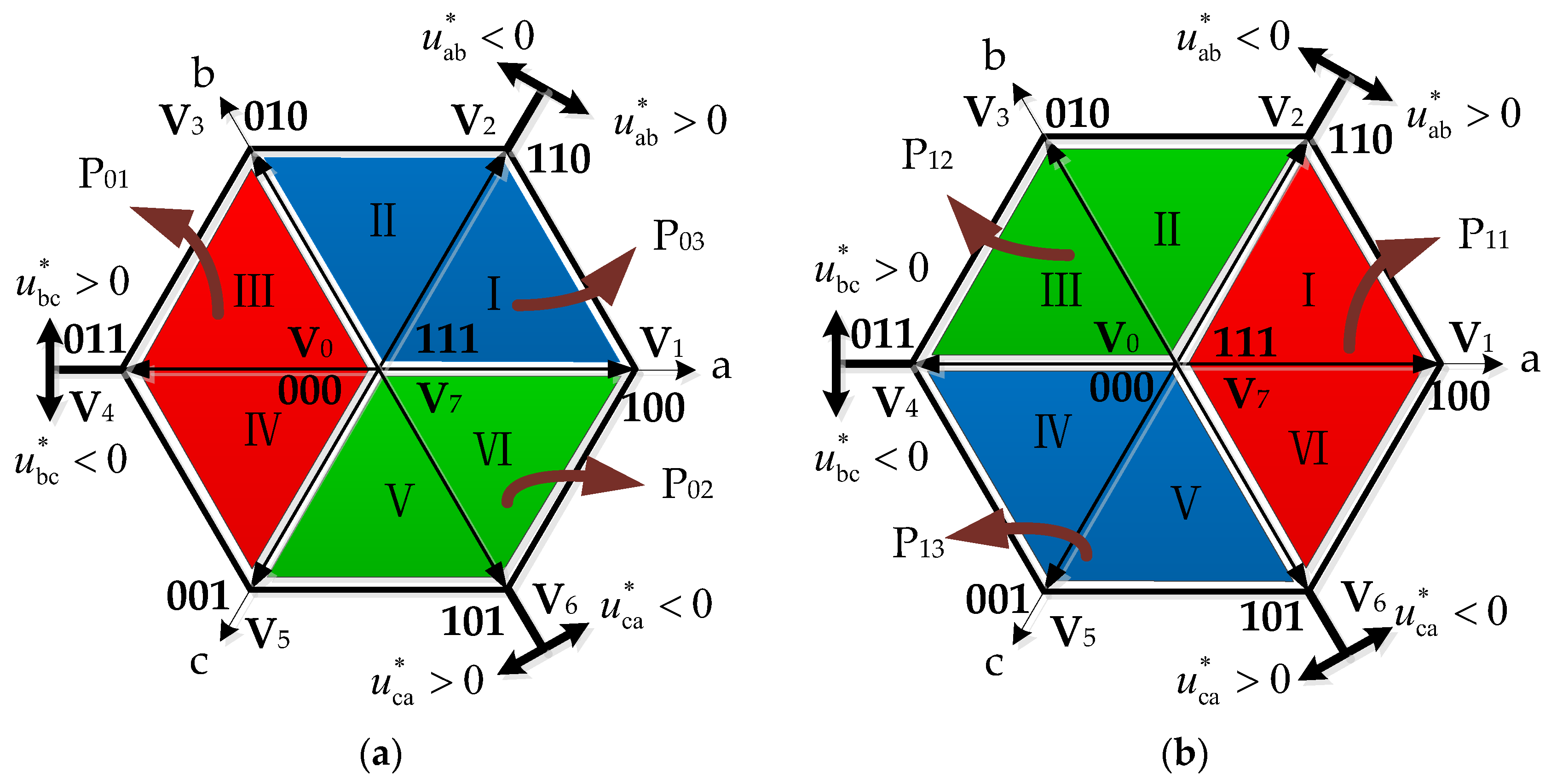
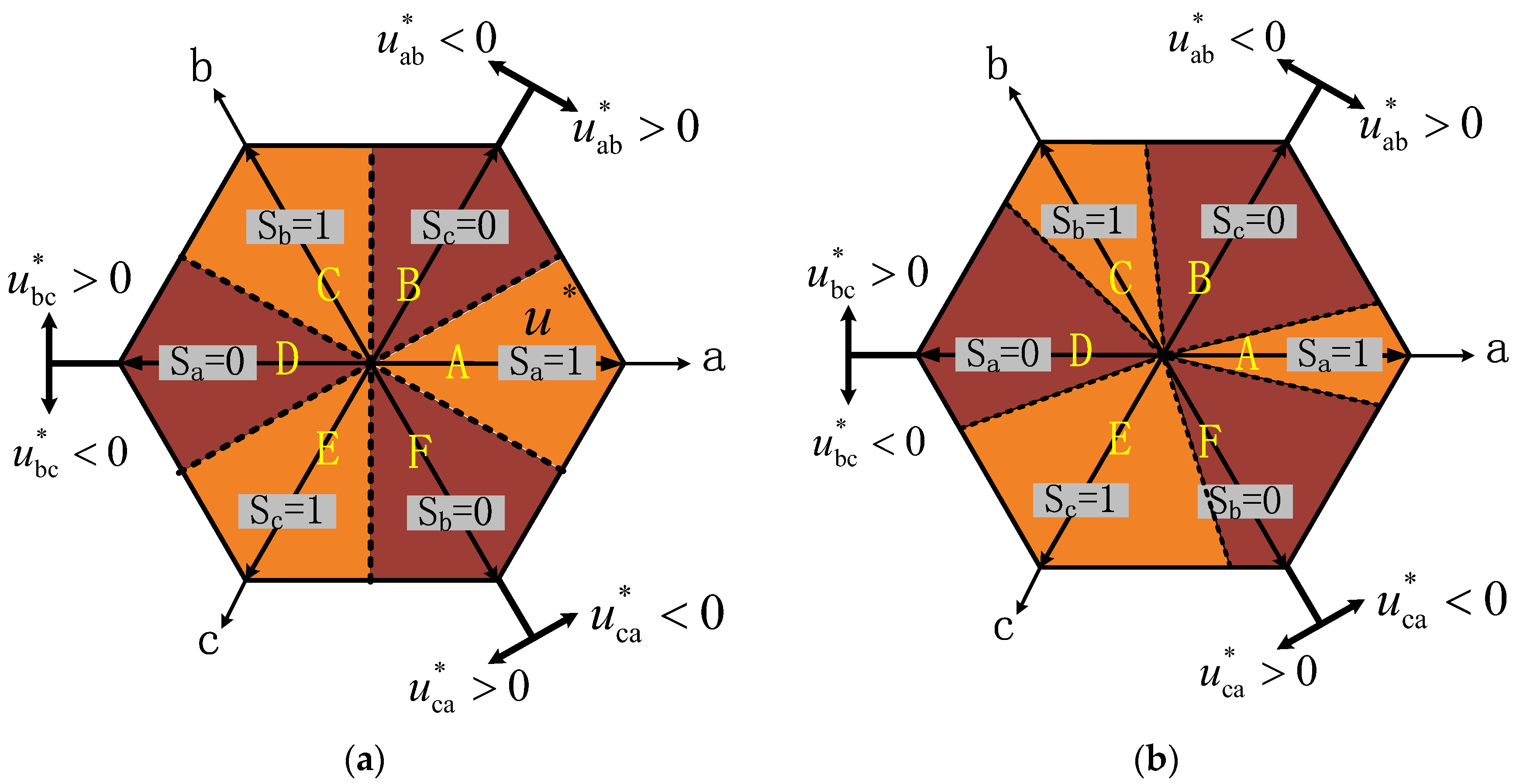
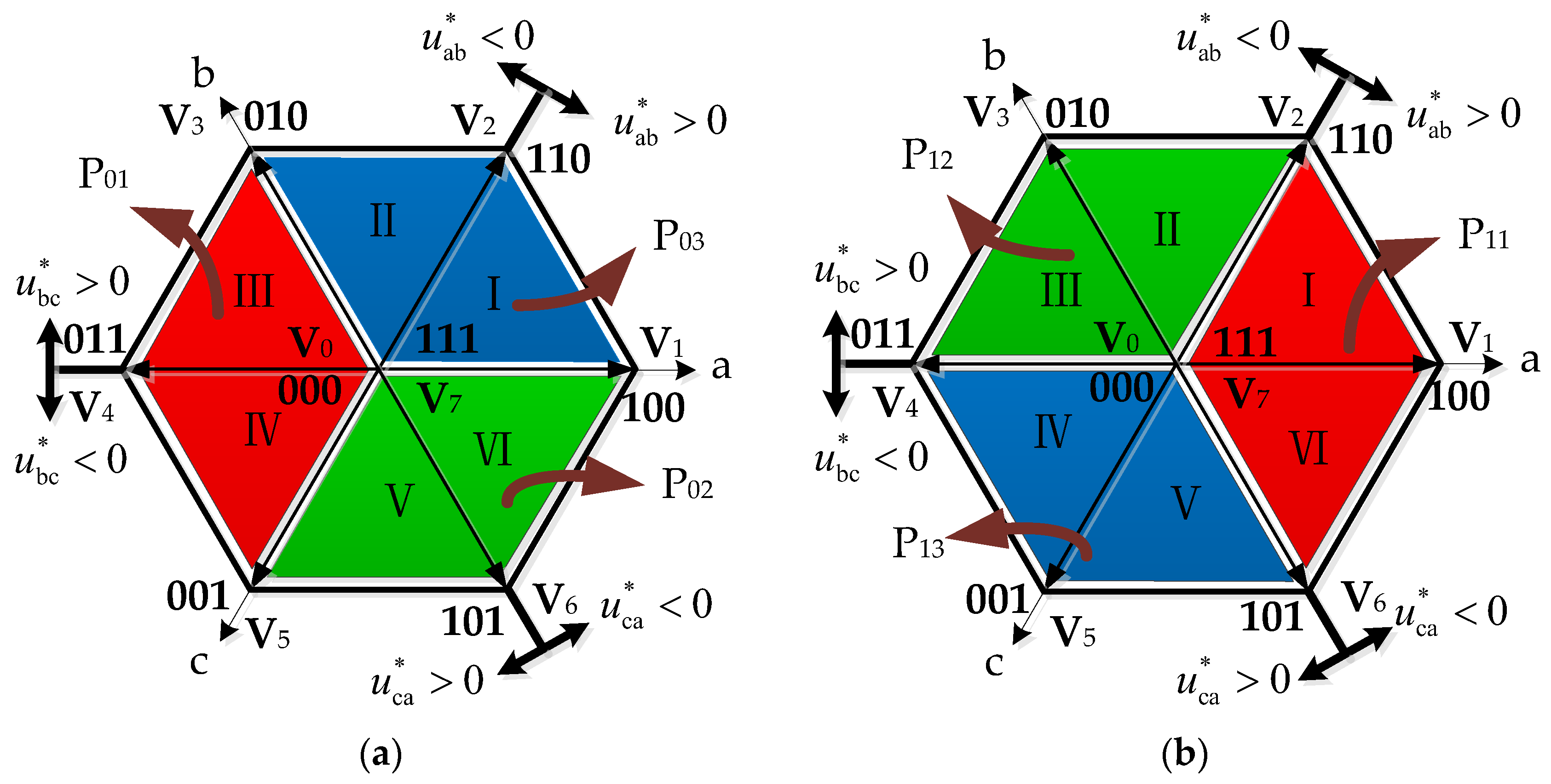
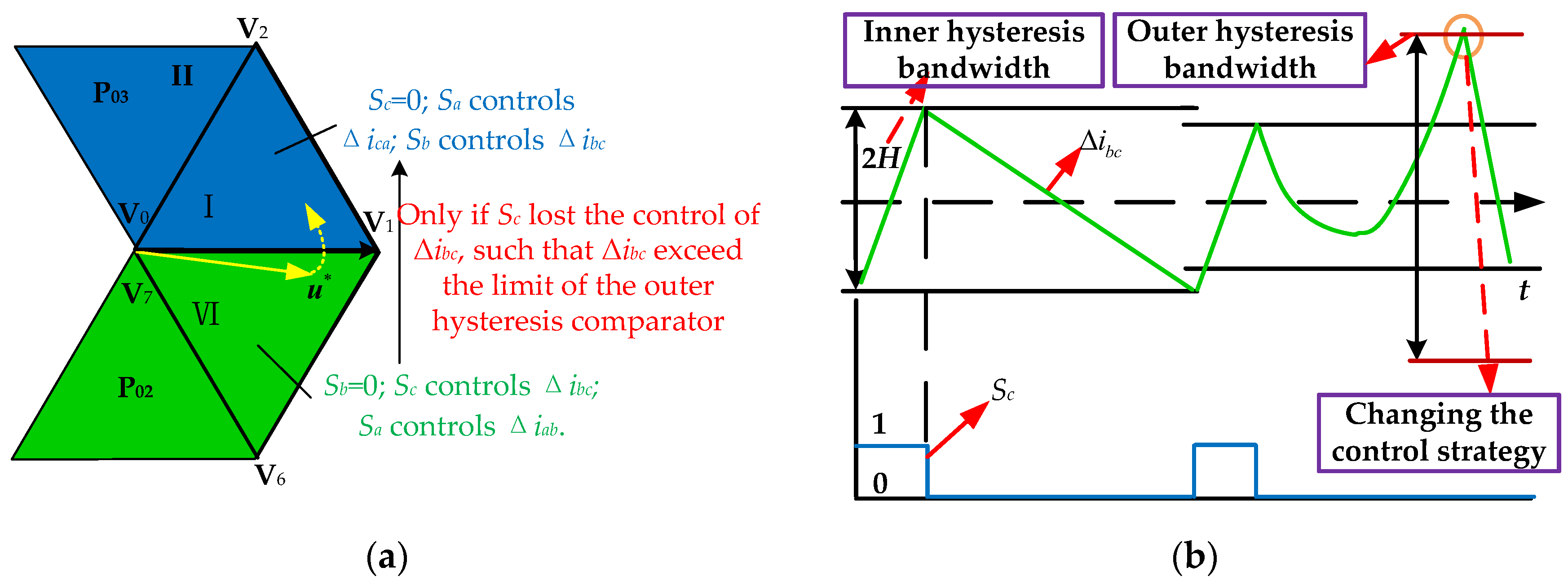
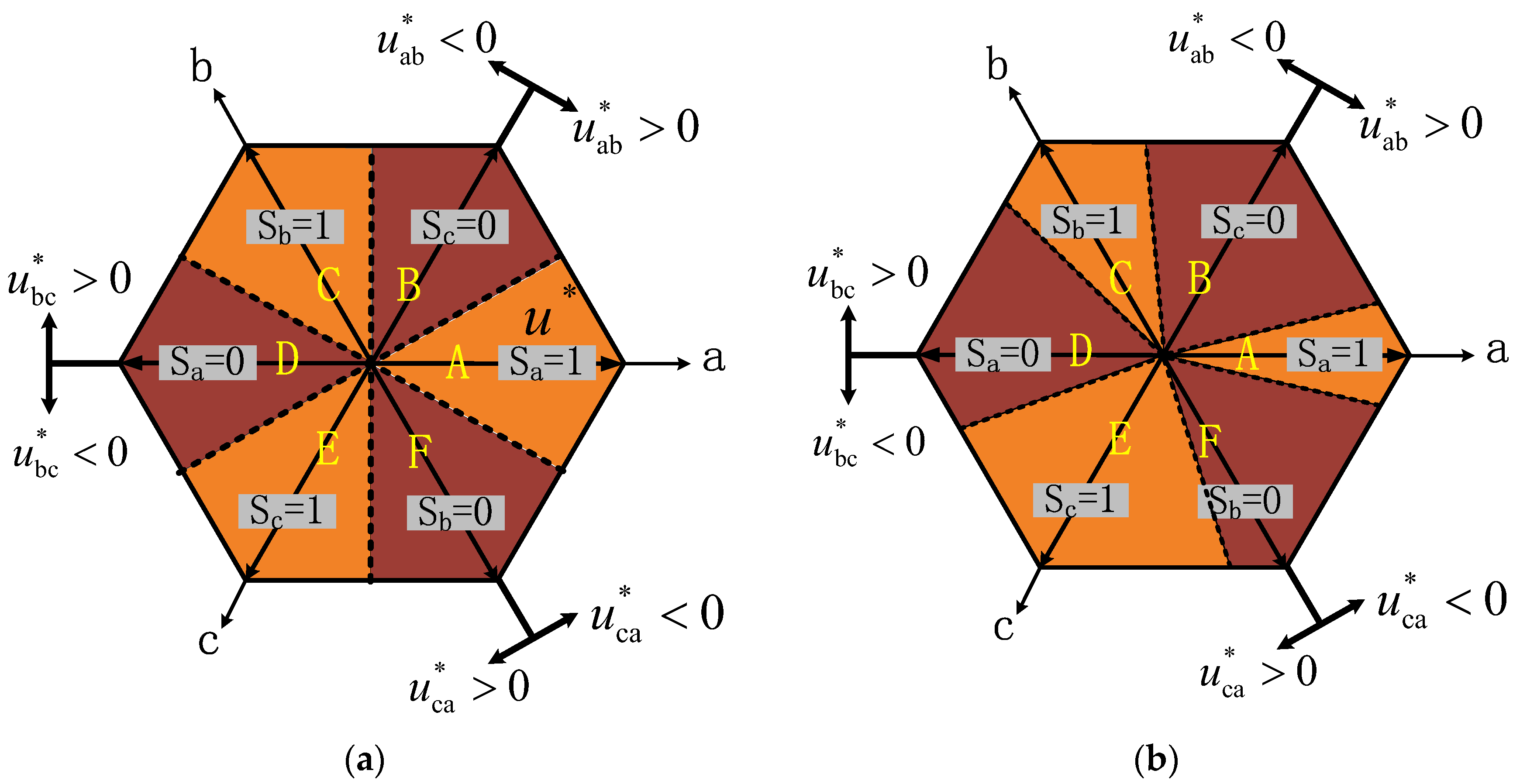
- S-FHCC is based on the division of three parallelogram regions in Figure 2, and the control strategies under mode 0 or mode 1 will be switched only if the current errors exceed the limit of the outer hysteresis bandwidth, which cannot be avoided, as illustrated in Figure 4. In contrast, ST-FHCC is based on the flexible division of six sub-regions in Figure 8, and the control strategies under mode 0 and mode 1 are switched alternatively by considering the location of u*. The reason is that two controllable current errors are always under control by two switches no matter what control strategy under mode 0 or mode 1 is adopted in the overlapping areas produced by the parallelogram regions of mode 0 and those of mode 1. Thus, one can switch the control strategy under mode 0 (or mode 1) into that under mode 1 (or mode 0) at the zero-crossing of current errors in the overlapping areas in order to smoothly transit the boundary determined by the three parallelogram regions under mode 0 (or mode 1), as shown by Figure 7b. As a consequence, the current errors will not exceed the limit of the outer hysteresis comparator and the outer hysteresis comparator is no longer required.
7. Conclusions
- (a)
- The switching frequency remains constant at 10 kHz in ST-FHCC. Moreover, the operation of voltage-space-vectors is improved via regulating the switch phases, such that the uncontrollable current error is significantly reduced and the operative voltage-space-vectors are all optimal.
- (b)
- A flexible division of the voltage-space-vectors diagram is proposed which divides the original diagram into six sub-regions, upon which mode 0 and mode 1 are switched alternately and smoothly. As a consequence, the inherent weakness of S-FHCC can be thoroughly overcome, e.g., the control strategies under mode 0 or mode 1 will be switched only if current errors exceed the limit of the outer hysteresis bandwidth.
- (c)
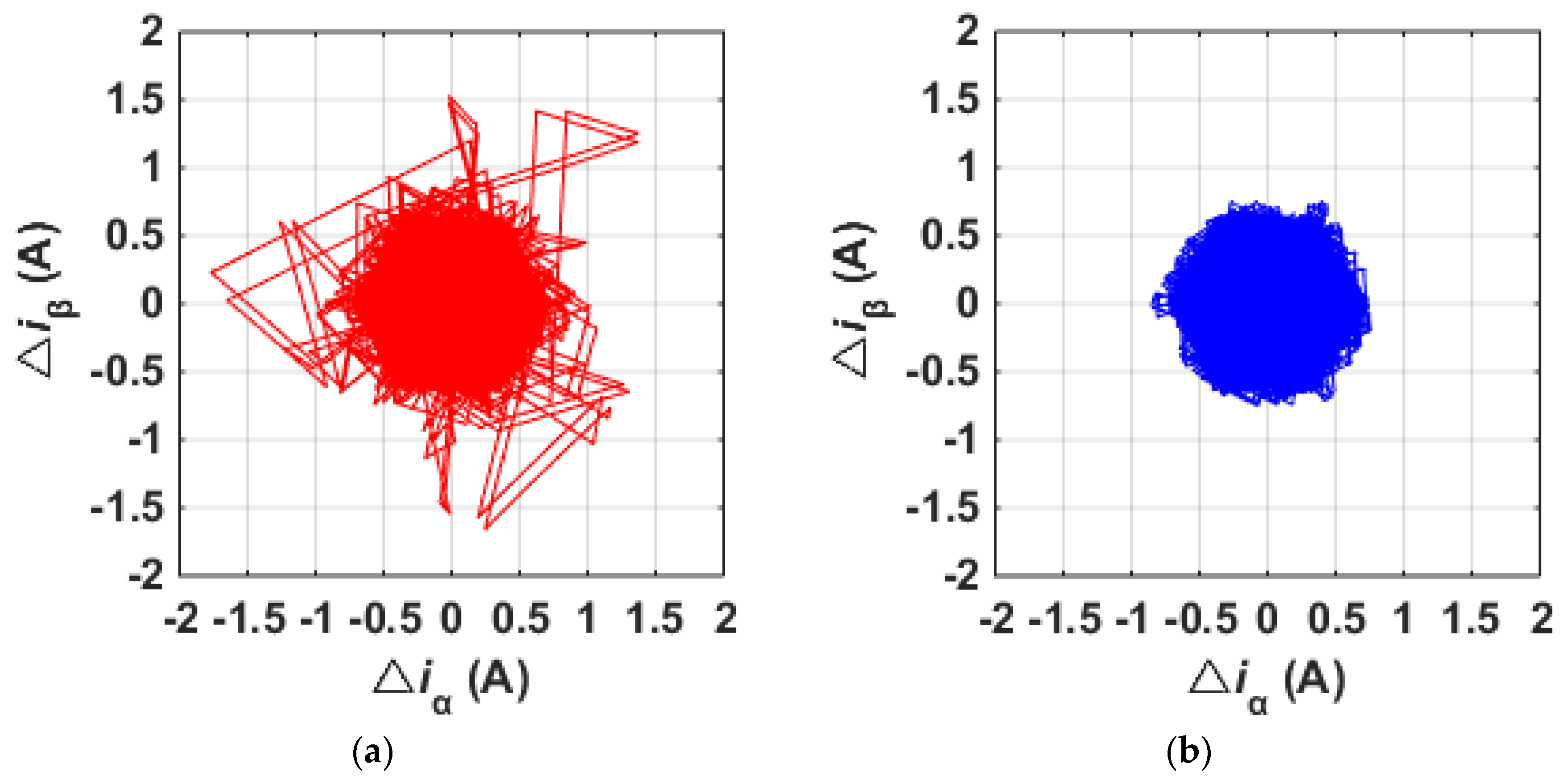
- Comprehensive simulation results verify that ST-FHCC can achieve a smoother, smaller, as well as more stable current error in comparison with that of S-FHCC.
Author Contributions
Funding
Conflicts of Interest
References
- Yang, B.; Zhang, X.S.; Yu, T.; Shu, H.C.; Fang, Z.H. Grouped grey wolf optimizer for maximum power point tracking of doubly-fed induction generator based wind turbine. Energy Convers. Manag. 2017, 133, 427–443. [Google Scholar] [CrossRef]
- Yang, B.; Jiang, L.; Wang, L.; Yao, W.; Wu, Q.H. Nonlinear maximum power point tracking control and modal analysis of DFIG based wind turbine. Int. J. Electr. Power Energy Syst. 2016, 74, 429–436. [Google Scholar] [CrossRef]
- Dong, J.; Li, S.N.; Wu, S.J.; He, T.Y.; Yang, B.; Shu, H.C.; Yu, J.L. Nonlinear observer based robust passive control of DFIG for power system stability enhancement via energy reshaping. Energies 2017, 10, 1082. [Google Scholar] [CrossRef]
- Yang, B.; Yu, T.; Shu, H.C.; Dong, J.; Jiang, L. Robust sliding-mode control of wind energy conversion systems for optimal power extraction via nonlinear perturbation observers. Appl. Energy 2018, 210, 711–723. [Google Scholar] [CrossRef]
- Yang, B.; Yu, T.; Shu, H.C.; Zhang, X.S.; Qu, K.P.; Jiang, L. Democratic joint operations algorithm for optimal power extraction of PMSG based wind energy conversion system. Energy Convers. Manag. 2018, 159, 312–326. [Google Scholar] [CrossRef]
- Yang, B.; Yu, T.; Shu, H.C.; Zhu, D.N.; Zeng, F.; Sang, Y.Y.; Jiang, L. Perturbation observer based fractional-order PID control of photovoltaics inverters for solar energy harvesting via Yin-Yang-Pair optimization. Energy Convers. Manag. 2018, 171, 170–187. [Google Scholar] [CrossRef]
- Yang, B.; Yu, T.; Shu, H.C.; Zhu, D.N.; An, N.; Sang, Y.Y.; Jiang, L. Energy reshaping based passive fractional-order PID control design of a grid-connected photovoltaic inverter for optimal power extraction using grouped grey wolf optimizer. Sol. Energy 2018, 170, 31–46. [Google Scholar] [CrossRef]
- Yang, B.; Hu, Y.L.; Huang, H.Y.; Shu, H.C.; Yu, T.; Jiang, L. Perturbation estimation based robust state feedback control for grid connected DFIG wind energy conversion system. Int. J. Hydrog. Energy 2017, 42, 20994–21005. [Google Scholar] [CrossRef]
- Seritan, G.; Triştiu, I.; Ceaki, O.; Boboc, T. Power quality assessment for microgrid scenarios. In Proceedings of the 2016 International Conference and Exposition of Electrical and Power Engineering (EPE), Iasi, Romania, 20–22 October 2016; pp. 723–727. [Google Scholar]
- Nieto, A.; Vita, V.; Ekonomou, L.; Mastorakis, N.E. Economic analysis of energy storage system integration with a grid connected intermittent power plant, for power quality purposes. WSEAS Trans. Power Syst. 2016, 11, 65–71. [Google Scholar]
- Nieto, A.; Vita, V.; Maris, T.I. Power quality improvement in power grids with the integration of energy storage systems. Int. J. Eng. Res. Technol. 2016, 5, 438–443. [Google Scholar]
- Ceaki, O.; Seritan, G.; Vatu, R.; Mancasi, M. Analysis of power quality improvement in smart grids. In Proceedings of the 10th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 23–25 March 2017; pp. 797–801. [Google Scholar]
- Tan, K.-H.; Lin, F.-J.; Chen, J.-H. A Three-Phase Four-Leg Inverter-Based Active Power Filter for Unbalanced Current Compensation Using a Petri Probabilistic Fuzzy Neural Network. Energies 2017, 10, 2005. [Google Scholar] [CrossRef]
- Musa, S.; Radzi, M.A.M.; Hizam, H.; Wahab, N.I.A.; Hoon, Y.; Zainuri, M.A.A.M. Modified synchronous reference frame based shunt active power filter with fuzzy logic control pulse width modulation inverter. Energies 2017, 10, 758. [Google Scholar] [CrossRef]
- Durna, E. Adaptive fuzzy hysteresis band current control for reducing switching losses of hybrid active power filter. IET Power Electron. 2018, 11, 937–944. [Google Scholar] [CrossRef]
- Wu, F.; Sun, B.; Zhao, K.; Sun, L. Analysis and solution of current zero-crossing distortion with unipolar hysteresis current control in grid-connected inverter. IEEE Trans. Ind. Electron. 2013, 60, 4450–4457. [Google Scholar] [CrossRef]
- Mao, H.; Yang, X.; Chen, Z.; Wang, Z. A hysteresis current controller for single-phase three-level voltage source inverters. IEEE Trans. Power Electron. 2012, 27, 3330–3339. [Google Scholar] [CrossRef]
- Lam, C.S.; Wong, M.C.; Han, Y.D. Hysteresis current control of hybrid active power filters. IET Power Electron. 2012, 5, 1175–1187. [Google Scholar] [CrossRef]
- Liu, F.; Maswood, A.I. A novel variable hysteresis band current control of three-phase three-level unity pf rectifier with constant switching frequency. IEEE Trans. Power Electron. 2006, 21, 1727–1734. [Google Scholar] [CrossRef]
- Davoodnezhad, R.; Holmes, D.G.; McGrath, B.P. A novel three-level hysteresis current regulation strategy for three-phase three-level inverters. IEEE Trans. Power Electron. 2014, 29, 6100–6109. [Google Scholar] [CrossRef]
- Wu, F.; Feng, F.; Luo, L.; Duan, J.; Sun, L. Sampling period online adjusting-based hysteresis current control without band with constant switching frequency. IEEE Trans. Ind. Electron. 2015, 62, 270–277. [Google Scholar] [CrossRef]
- Ho, C.N.M.; Cheung, V.S.P.; Chung, H.S.H. Constant-frequency hysteresis current control of grid-connected VSI without bandwidth control. IEEE Trans. Power Electron. 2009, 24, 2484–2495. [Google Scholar] [CrossRef]
- Chen, Y.; Kang, Y. The variable-bandwidth hysteresis-modulation sliding-mode control for the PWM–PFM converters. IEEE Trans. Power Electron. 2011, 26, 2727–2734. [Google Scholar] [CrossRef]
- Suresh, Y.; Panda, A.K.; Suresh, M. Real-time implementation of adaptive fuzzy hysteresis-band current control technique for shunt active power filter. IET Power Electron. 2012, 5, 1188–1195. [Google Scholar] [CrossRef]
- Pan, C.; Huang, Y.; Jong, T. A constant hysteresis-band current controller with fixed switching frequency. In Proceedings of the 2002 IEEE International Symposium on Industrial Electronics, L’Aquila, Italy, 8–11 July 2002; IEEE: Piscataway, NJ, USA, 2002; pp. 1021–1024. [Google Scholar]
- Ramchand, R.; Gopakumar, K.; Patel, C.; Sivakumar, K.; Das, A.; Abu-Rub, H. Online computation of hysteresis boundary for constant switching frequency current-error space-vector-based hysteresis controller for VSI-fed IM drives. IEEE Trans. Power Electron. 2012, 27, 1521–1529. [Google Scholar] [CrossRef]
- Holmes, D.G.; Davoodnezhad, R.; McGrath, B.P. An improved three-phase variable-band hysteresis current regulator. IEEE Trans. Power Electron. 2013, 28, 441–450. [Google Scholar] [CrossRef]
- Kapat, S. Parameter-Insensitive Mixed-signal hysteresis-band current control for point-of-load converters with fixed frequency and robust stability. IEEE Trans. Power Electron. 2017, 32, 5760–5770. [Google Scholar] [CrossRef]
- Fereidouni, A.; Masoum, M.A.S.; Smedley, K.M. Supervisory nearly constant frequency hysteresis current control for active power filter applications in stationary reference frame. IEEE Power Energy Technol. Syst. J. 2016, 3, 1–12. [Google Scholar] [CrossRef]
- Zeng, J.; Yu, C.; Qi, Q. A novel hysteresis current control for active power filter with constant frequency. Electr. Power Syst. Res. 2004, 68, 75–82. [Google Scholar] [CrossRef]
- Zeng, J.; Ni, Y.; Diao, Q.; Yuan, B.; Chen, S.; Zhang, B. Current controller for active power filter based on optimal voltage space vector. IEE Proc. Gener. Transm. Distrib. 2001, 148, 111–116. [Google Scholar] [CrossRef]
- Vahedi, H.; Pashajavid, E.; Al-Haddad, K. Fixed-band fixed-frequency hysteresis current control used In APFs. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 5944–5948. [Google Scholar]
- Vahedi, H.; Sheikholeslami, A.; Bina, M.T. A novel hysteresis bandwidth (NHB) calculation to fix the switching frequency employed in active power filter. In Proceedings of the 2011 IEEE Applied Power Electronics Colloquium (IAPEC), Johor Bahru, Malaysia, 18–19 April 2011; pp. 155–158. [Google Scholar]
- Vahedi, H.; Sheikholeslami, A.; Bina, M.T.; Vahedi, M. Review and simulation of fixed and adaptive hysteresis current control considering switching losses and high-frequency harmonics. Adv. Power Electron. 2011, 2011. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Regions | Mode 0 | Regions | Mode 1 | ||||
|---|---|---|---|---|---|---|---|
| P01 | Sa = 0 | Sb controls Δiab | Sc controls Δica | P11 | Sa = 1 | Sb controls Δiab | Sc controls Δica |
| P02 | Sb = 0 | Sc controls Δibc | Sa controls Δiab. | P12 | Sb = 1 | Sc controls Δibc | Sa controls Δiab. |
| P03 | Sc = 0 | Sa controls Δica | Sb controls Δibc | P13 | Sc = 1 | Sa controls Δica | Sb controls Δibc |
| Sub-Regions | Control Strategy | ||
|---|---|---|---|
| A | Sa = 1 | Sb controls Δiab | Sc controls Δica |
| B | Sc = 0 | Sa controls Δica | Sb controls Δibc |
| C | Sb = 1 | Sa controls Δiab | Sc controls Δibc |
| D | Sa = 0 | Sb controls Δiab | Sc controls Δica |
| E | Sc = 1 | Sa controls Δica | Sb controls Δibc |
| F | Sb = 0 | Sa controls Δiab | Sc controls Δibc |
| The Location of u* | A | B | C | D | E | F |
|---|---|---|---|---|---|---|
| The relationships | Sa = 1 | Sa = | Sa = S1 | Sa = 0 | Sa = | Sa = S1 |
| Sb = | Sb = S2 | Sb = 1 | Sb = | Sb = S2 | Sb = 0 | |
| Sc = S3 | Sc = 0 | Sc = | Sc = S3 | Sc = 1 | Sc = |
| The Location of u* | A or D | B or E | C or F |
|---|---|---|---|
| The relationships | Δh1 = Δhb | Δh1 = * | Δh1 = Δha |
| Δh2 = * | Δh2 = Δhb | Δh2 = Δhc | |
| Δh3 = Δhc | Δh3 = Δha | Δh3 = * |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, J.; Yang, L.; Ling, Y.; Chen, H.; Huang, Z.; Yu, T.; Yang, B. Smoothly Transitive Fixed Frequency Hysteresis Current Control Based on Optimal Voltage Space Vector. Energies 2018, 11, 1695. https://doi.org/10.3390/en11071695
Zeng J, Yang L, Ling Y, Chen H, Huang Z, Yu T, Yang B. Smoothly Transitive Fixed Frequency Hysteresis Current Control Based on Optimal Voltage Space Vector. Energies. 2018; 11(7):1695. https://doi.org/10.3390/en11071695
Chicago/Turabian StyleZeng, Jiang, Lin Yang, Yuchang Ling, Haoping Chen, Zhonglong Huang, Tao Yu, and Bo Yang. 2018. "Smoothly Transitive Fixed Frequency Hysteresis Current Control Based on Optimal Voltage Space Vector" Energies 11, no. 7: 1695. https://doi.org/10.3390/en11071695
APA StyleZeng, J., Yang, L., Ling, Y., Chen, H., Huang, Z., Yu, T., & Yang, B. (2018). Smoothly Transitive Fixed Frequency Hysteresis Current Control Based on Optimal Voltage Space Vector. Energies, 11(7), 1695. https://doi.org/10.3390/en11071695