1. Introduction
The trend in power systems all over the world is changing and expanding through new interconnections with large penetration of ReGen plants, such as WPP and photovoltaic power plants (PVP). This trend in future power systems not only adds to their complexity but also make these systems more vulnerable and dependent on production from Renewable Energy Sources (RES). Conventional power plants are also expected to be replaced by ReGen plants. For instance, at national level, Denmark has set goals to reach 100% renewable energy by 2050 [
1]. Other countries like USA, China, Norway, Iceland, etc. are heavily investing on RES [
2]. In addition to the several economic and environmental related benefits, the huge penetration of RES raises concerns regarding operational stability and security of the future power systems [
3] due to the fluctuating nature of these energy sources. According to [
3,
4,
5], one way to ensure that these ReGen plants will not be detrimental to the stability and security of power systems is to require control functionalities (such as, reactive/reactive power support, etc.) from ReGen plants. These control functionalities, also called Ancillary Services (AS), should resemble to those traditionally offered by conventional power plants. Therefore, in the last one decade, this concern has led the industry as well as academia to an intensified research for developing control algorithms and defining requirements for the provision of AS from ReGen plants (see [
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21], etc.).
The authors in [
4,
5,
22] have identified voltage stability challenges related to the huge penetration of ReGen plants into MV distribution systems. Further, controllers have also been developed with the specific aim of regulating the voltage/reactive power and analyze the suitability for a coordinated voltage stability support AS from WPPs and PVPs in distribution levels. However, this paper focuses on the provision of frequency stability support AS from ReGen (especially WPPs). According to [
3,
23], the capabilities (technical as well as operational) of WPPs to provide frequency control support can be confirmed from most of the available research in this area. For instance, the provision of frequency stability support with regards to inertia and primary frequency control has been investigated in [
6,
7,
8,
9,
10,
11,
12,
13], while [
14,
15,
16,
17,
18] focus on the small-signal stability support as the damping of power oscillations. Regarding the provision of AS from WPP, initially individual wind turbines remained in focus to investigate their capabilities to provide a required AS (see [
6,
7,
8,
9,
24,
25,
26,
27]), however now in the recent years, the focus of research has shifted towards investigating provision of AS at “plant” level (see for instance [
11,
14,
15,
16,
17,
18,
28,
29,
30,
31,
32,
33]).
It should be noted that despite of a lot of work (as cited above) on the provision of AS from ReGen plants, an essential aspect scarcely addressed in recent years is related to the role of Information and Communication Technologies (ICT) in the provision of online AS. The provision of online ASs (such as voltage/frequency control support, etc.) highly depends on the underlying communication network infrastructure. Therefore, the performance and characteristics of ICT related issues have to be considered appropriately during the design and assessment any AS from ReGen plants, as this might affect the provision of AS from ReGen plants and ultimately to the overall power system.
In [
34,
35], the authors have investigated the impact providing online voltage/reactive-power support from ReGen plants using cellular-based public networks. It has also been identified how higher delays, failure in communication and cyberattacks can deteriorate the performance of a power system. Regarding communication impact and its requirements for frequency control, most of the work has been done in relation to the load frequency control (LFC) from the conventional power plants. Such as, the authors in [
36,
37,
38,
39,
40] have addressed the issue of delays in communication for LFC using linear matrix inequality technique, the robust decentralized method and PI type controller. Reference [
37] shows how communication delay effects LFC in a deregulated environment. Furthermore, Shayeghi et al. [
41] reported time delay in design of LFC in deregulated environment. The authors in [
42] have explored the effects of including communication delays on the small signal stability of power systems. Whereas, in [
43,
44], the authors proposed methods to remove oscillations that occur as a result of time-delayed feedback control in power systems. The estimation of communication delay for LFC in two-area power system is described in [
45], yet, without considering the RES integration into the power system. Similarly, Sargolzaei et al. [
45] propose a method to thwart time-delay switch attacks on LFC in distributed power systems without taking into account the power production from RES.
Therefore, in this paper we assess the impact of ICT on the frequency control support (Fast Frequency Response (FFR)) from ReGen plants, with special focus on WPPs. It is pertinent to mention here that instead of relying on assumptions regarding delays or packet loss rates, considerations on delays in communication network models are based on real measurements. A coordination scheme for FFR including parameters as proposed in [
46] is considered for analysis. Further, two operating conditions of WPPs are taken into consideration namely partial and full load, respectively.
The scope of this article is not to study control coordination, design FFR controller or make a perfect match between control response and communication delay to find optimum parameters. However, the main goal and scope of this article is to demonstrate the ICT related aspects, challenges and requirements associated to a given frequency control support scheme from WPPs. The design of FFR controller and its parameter tuning has already been addressed in [
46] and adopted as such in this paper. While, for the ICT part, cellular communication networks are considered for their ubiquitous coverage around the globe. Further, it could be a remarkable achievement to assess the entire European grid through simulation studies. Nevertheless, the necessary level of information related to the entire EU grid system is not available for the academia. Therefore, by studying a small but representative power system, having the same characteristics and properties as that of the continental European system, will be more practicable given that the proposed solutions are scalable and replicable. For this, a generic island power system model developed and used in [
46] has been used to generate relevant case studies. Although this generic power system model has been designed to be used with various wind power penetration scenarios [
46], this paper only considers a penetration level of 50% (to comply with Denmark’s intermediate goal for 2020 [
1]). Moreover, a perfect knowledge of instantaneous available wind power has also been assumed for the test cases. The work presented in this article is believed to provide the TSOs with new insights into the role, need and importance of communication networks for the provision of AS from WPPs in power systems where conventional power plants are being largely displaced by WPPs.
The paper is organized as follows:
Section 2 elaborates on the various aspects and challenges associated to ICT in providing online frequency support and coordination from ReGen.
Section 3 defines the use case and test scenarios, while the evaluation criteria for assess system frequency is stated in
Section 4. The evaluation setup including the description of the power system model and test cases are discussed in
Section 5.
Section 6 presents the results related to the impact of communication properties on online frequency control coordination and finally the conclusive remarks are reported in
Section 7.
2. Online Frequency Support and Need for Communication
According to [
47], “Frequency stability refers to the ability of a power system to maintain steady frequency following a severe disturbance between generation and load”. Frequency instability can result in continuous frequency swings that leads to the tripping of generating units or loads. During the changes in system frequency, characteristic times of the actuated processes and devices range from milliseconds (like under frequency control) to several minutes, corresponding to the response of devices.
Frequency control support and coordination from ReGen plants is reported in [
46], including the related models, methodologies, development of controls and study cases considered for both primary and secondary frequency control. The focus in [
46] was to improve the frequency control support from ReGen plants (with special focus on wind power plants) by optimizing and coordinating the total support from ReGen plants. In traditional power system operation, primary frequency control has been performed in the conventional power plants at the plant level. Moreover, in the literature, the WPPs that are employed with inertial response, fast frequency control, or enhanced frequency response, are investigated similar to the traditional approach. In this paper, possible aggregator level is proposed for frequency support mechanism in the future power system systems with high wind power penetration and fast communication networks. A similar concept has been investigated and some implementation was done in [
48]. According to [
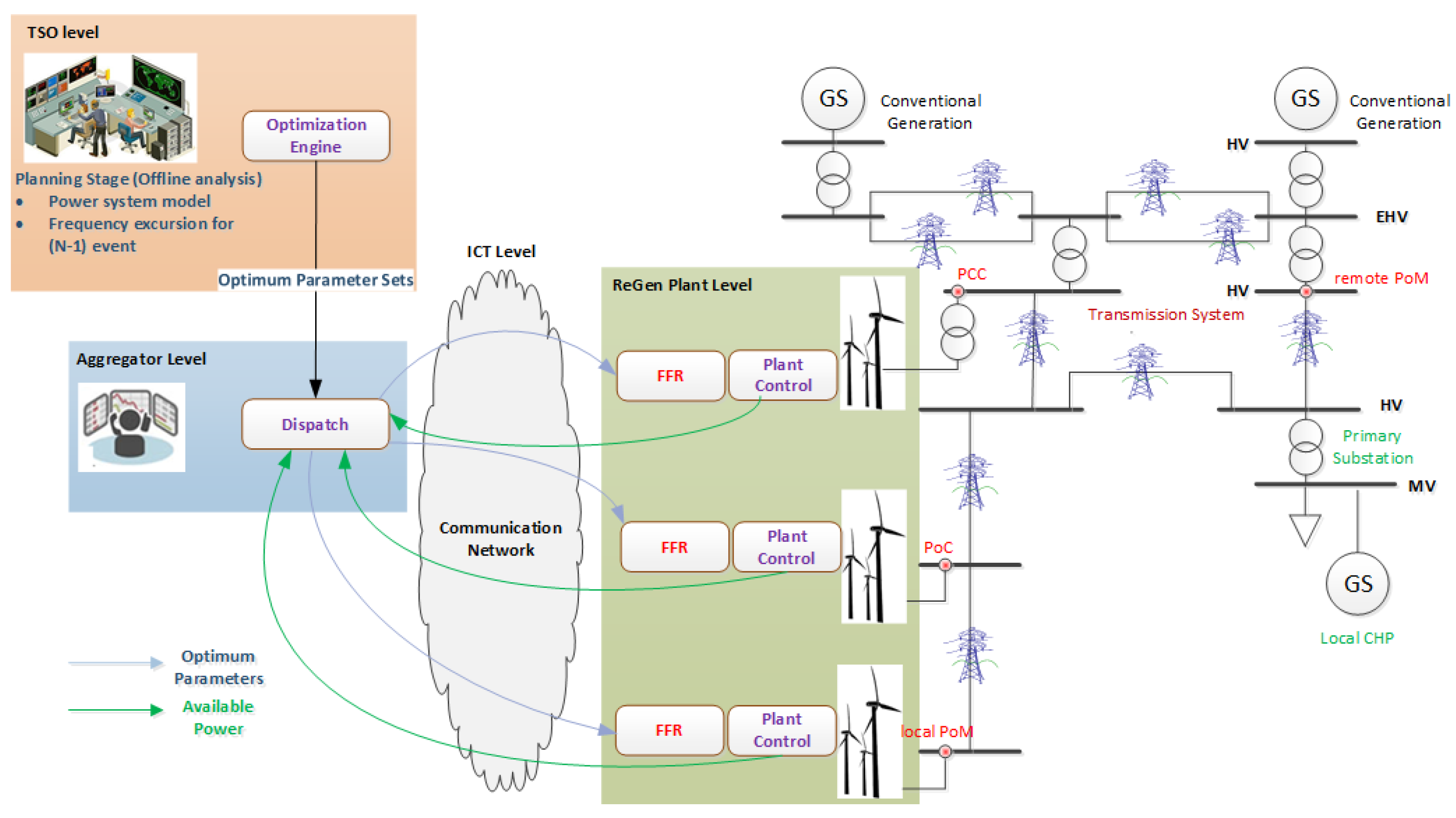
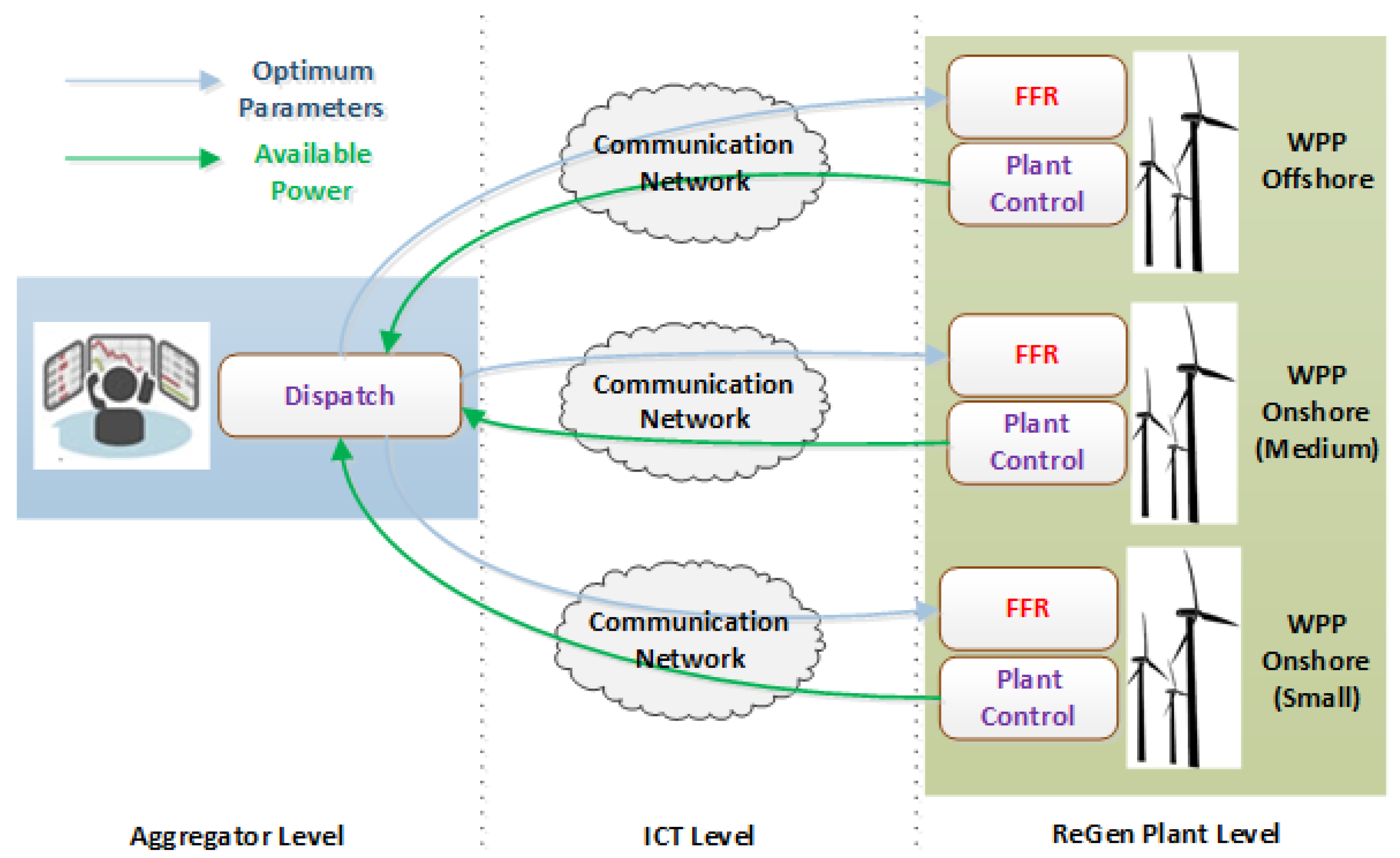
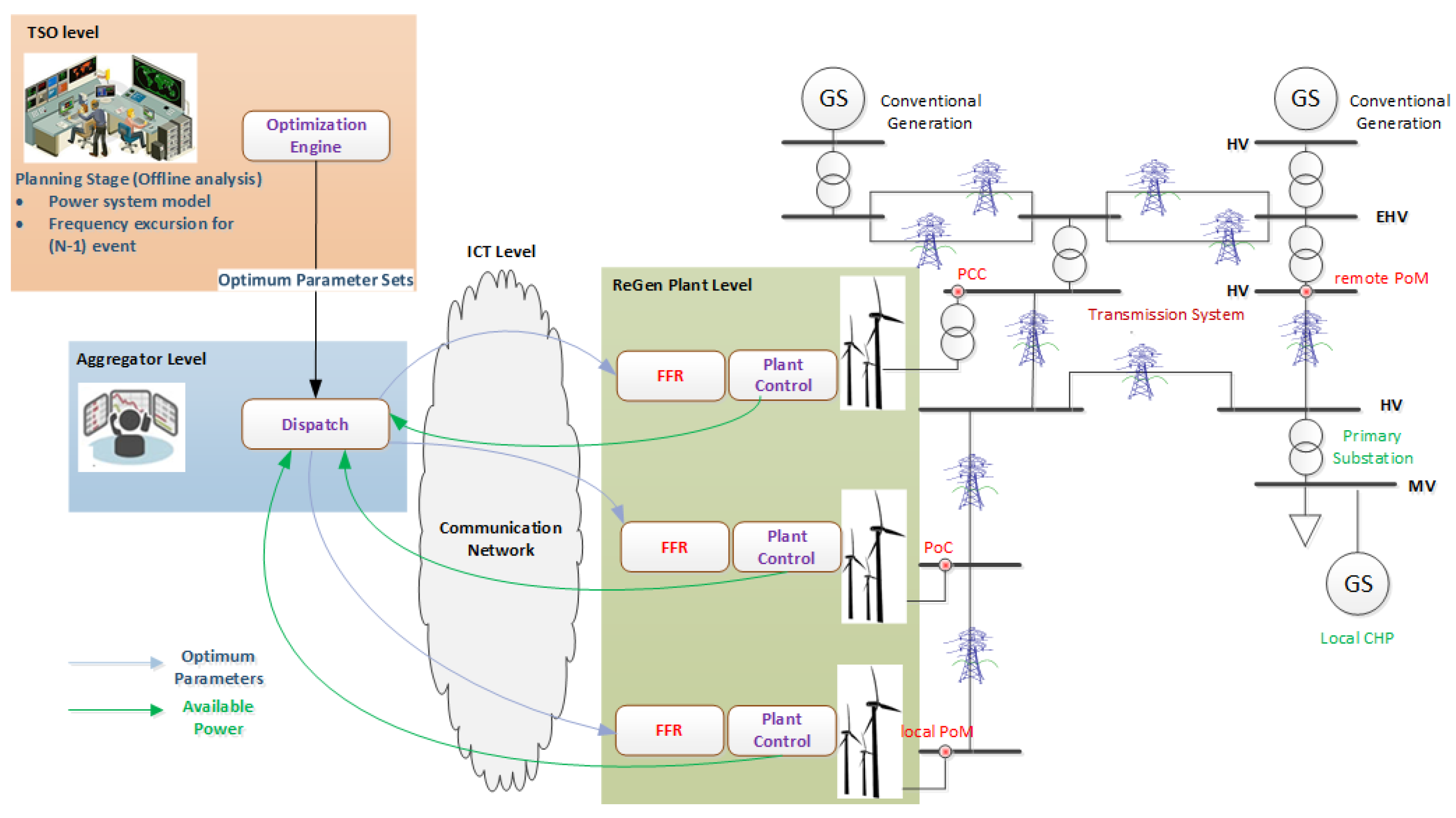
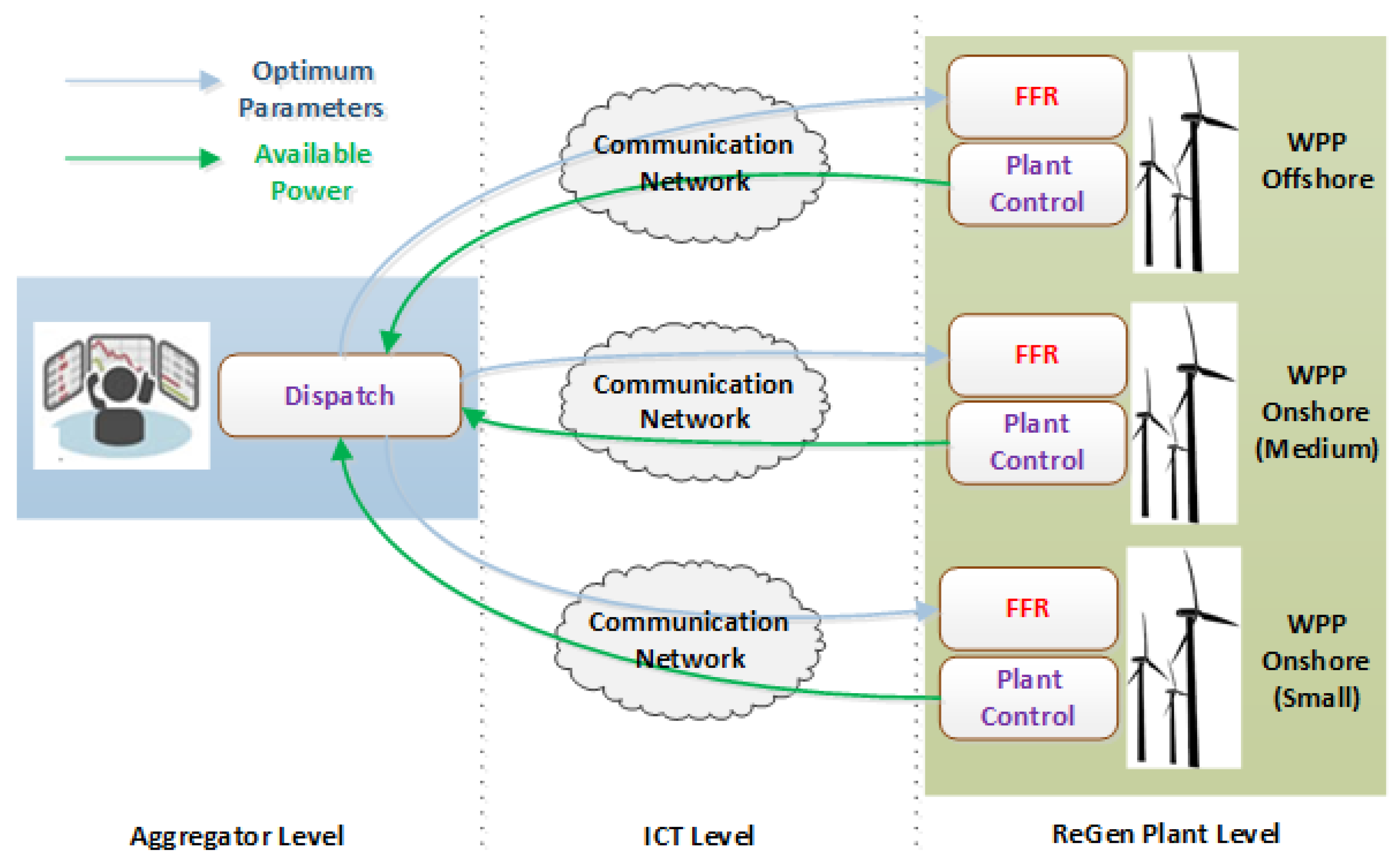
46], the provision of frequency support in power systems is usually based on the measurements of frequency deviation and rate of change of frequency. The measurements of frequency deviation are quick and reliable, however measuring the rate of change of frequency is done over sliding windows of several hundred milliseconds and is thus always afflicted with a delay. For the online coordination, ReGen plants should send status updates at regular intervals to the system operator, based on which set-points are calculated and sent back to the ReGen plants (see
Figure 1). Since, the ReGen plants will be dispersed geographically throughout the system, and being far apart from the control centers, a time delay is expected in receiving the set-points. As a result, the contribution of a ReGen plant to the system frequency support will be also be delayed. The delay as well as other properties of communication (such as packet loss, throughput, etc.) associated to any communication network depend on the underlying network communication infrastructure. Thus, the optimized FFR support discussed in [
46] will likely be non-optimum, if not deteriorating to the system response.
Therefore, in the following subsections, this paper highlights: (1) the different communication network options that can be used in the future to support communication between ReGen plants and the control centers, and (2) the extent to which the delays associated to these networks can impact frequency support coordination from ReGen plants. The optimization process employed in [
46] is used as such including the various delays in measurement and communication.
2.1. ICT Challenges in Online Frequency Support
Compared to voltage/reactive-power, which is more of a local phenomenon [
49], the LFC is a global phenomenon that has been implemented in a centralized scheme since the start of the interconnected power system [
49]. Therefore, when it comes to provide frequency support and coordination from power generation plants, the TSO directly takes the charge [
46]. However, it is also foreseen that aggregators of these ReGen units may take the responsibility, in close cooperation with system operators (TSO/DSO), for hosting ancillary services, such as voltage/frequency control capabilities, besides trading energy [
50]. Nevertheless, in any case, it will be essential to add Supervisory Control and Data Acquisition (SCADA) with an appropriate communication network infrastructure to connect ReGen plants to system operator.
Nowadays, since fiberoptics, cable Internet, and cellular networks are already widely deployed by the telecom operators and have high geographical coverage [
51,
52], these technologies could be used to connect ReGen plants to the control centers using SCADA. Communication via fiberoptics offers several advantages over copper as well as other modes of communication, such as: super low latency, prevents electrical noise induction, and eliminates signal ground loops [
53,
54], etc. However, for wide-area SCADA network, installing fiber optic cables requires huge initial investment and thus, highly expensive. In this regards, wireless networks prove to be a cost-effective substitute to the use of fiber optic-based communication. Wireless networks, specifically cellular networks, can provide up to 90% savings [
55] compared to installing fiber optic cables, with significantly accelerated implementation. Today, cellular networks have turned out to be a dominant means of communication for Machine-to-Machine (M2M) communication in not only smart grids but also other control systems. For instance, according to [
56], “Victoria’s South East Water replaced its digital radio system with a high-speed IP-based communications hub with 3G and 4G cellular modems, as well as DSL direct links”. Therefore, in this paper we focus mainly on using the cellular networks for communication between the ReGen plants and the control center to demonstrate the impact on the provision of frequency control support from, specifically, WPP.
2.2. Role of Communication Networks in SCADA
As the name implies, SCADA system provides the control and monitoring of remote devices (called Remote Terminal Units (RTUs)) through an appropriate communication infrastructure. It uses communication protocols such as Modbus or DNP3 that are based on polling schemes for collecting information from all end devices and reporting the data back to a central SCADA master [
57]. Based on the received data, the system can then send set-points or control decisions accordingly. Since, SCADA was initially designed for industrial processes using proprietary serial protocols; it was usually kept isolated from not only other networks but also the computer systems [
57]. However, in order to merge many different network types (such as data, control signals, etc.) in a single network as well as to present significant cost savings to a business, SCADA industrial control systems are now being connected with cooperate networks on the Internet. With this, the traditional SCADA has shifted from the proprietary serial protocols to the world of Internet Protocol (IP). Today, many industries have increased connectivity between corporate network and SCADA to allow more informed decisions to be made and thus improving businesses. It is important to mention here that moving from proprietary networks to IP-based networks increases the level of risk [
57] in terms of cyber-security, etc. Therefore, with increasing interest in the security of Networked Control Systems (NCS) such as smart grids, it becomes vital for the asset owners to understand the various available IP-based solutions and make an effective security-based risk management decision [
57].
DNP3 and Modbus were originally designed and aimed for use in communication links supporting serial data communications with low-bandwidth requirements. Therefore, these data collection applications in SCADA were tolerant of long communication latencies with most likely deterministic delays due to direct link between application layer and MAC layer. On the other hand, since IP-based data links (wireless as well as wired Ethernet bases networks) offer higher data rates, the IP-based SCADA allows for lower communications latency, with naturally stochastic delay types. It is worth mentioning here that the latency related requirements for each SCADA scheme are determined by not only the number of devices being polled, but also the rate at which these devices are required to be polled relative to control system response time requirements [
57]. While, high throughput wireless networks are more flexible in terms of network size as well as polling rates. Thus, based on the available throughput, trade-off in the network size can be made during the design phase to attain a desired response time based on the given data rate.
Today, the cellular technologies (such as, 3G, 4G, LTE) provide throughput on the order of millions of bits per second. Additionally, cellular communications network and base station infrastructure being ubiquitous, allows greater system access and easy scalability. This means that a large number of end devices can be polled with unbounded network size. Further, in cellular networks, a given area is divided into distinct cells, where each cell is connected to the wireless transceiver. All cells in the given area are interconnected to cover long distances, providing high data speeds, low initial costs and several other significant benefits over other forms of wireless communication. However, the technology used in any considered network scenario, will have an important impact on the costs of the actions in the operational processes and thus, also on the overall Operational Expenditure (OPEX) cost for the considered scenario. From the perspective of a system operator (i.e., TSO), to employ cellular networks, an exhaustive techno-economic model for these networks (as well as individual technologies) with inherent coupling of Capital Expenditure (CAPEX) and OPEX cost elements is required. Such a model for LTE networks is provided in [
58], while [
59] describes a general model for OPEX of a telecom operator.
From the perspective of reliable and fast delivery of any ancillary service from ReGen, it is important also to analyze the performance of these cellular networks based on the critical communication properties. Therefore, in the following, coverage and performance of cellular networks in Denmark is briefly described.
2.3. Cellular Network Performance in Denmark
Although many communication properties, as detailed in [
53,
60,
61], can be linked, but two properties are considered here, i.e., delay and information loss rate (also termed as packet loss rate). Because, delay in transmission can cause the operator to make decision based on old data, or a ReGen to change behavior based on old control messages. While, information loss in communication might mean that operator/ReGen tries to make decision based on incomplete data. Since the delay and packet loss in cellular networks are non-deterministic, it is worth exploring the exact range of these properties for analyzing the impact of using these networks to support frequency control and coordination from ReGen. In the following, the range of delays and packet loss probabilities is discussed, specifically for Denmark.
2.3.1. Information Collection and Description
NetMap [
62,
63] is used to obtain information about cellular technologies and their performance in terms of Round Trip-Times (RTTs) and measured signal strength [
64]. NetMap is a crowd sourcing-based system for performing and collecting measurements of cellular network connection performance. NetMap is exploiting the ubiquity of smartphones by having them perform and collect measurements of network performance using the cellular connection. This is done by having users install an app on their smartphones, acting as front-end client software, which handles the measurements and scheduling. The collected measurements are then submitted to the back end system, where measurements are collected and processed. NetMap is currently only deployed and measuring cellular networks in Denmark [
63].
2.3.2. Measurement Scenario
To understand the measurement results it is important to understand what is being measured. The NetMap setup consists of a front-end component and a back end component where the connection between is measured. The front-end component is an app on a smartphone with a cellular connection, and the back end component is a fixed measurement server, connected to the research network in Denmark. This means that the connection covers two types of connections: (1) the wireless cellular connection to the radio access network, and (2) the connection between radio access network and measurement server. The assumption is that the main influence to the network performance origins from the cellular connection in terms of delay and variance.
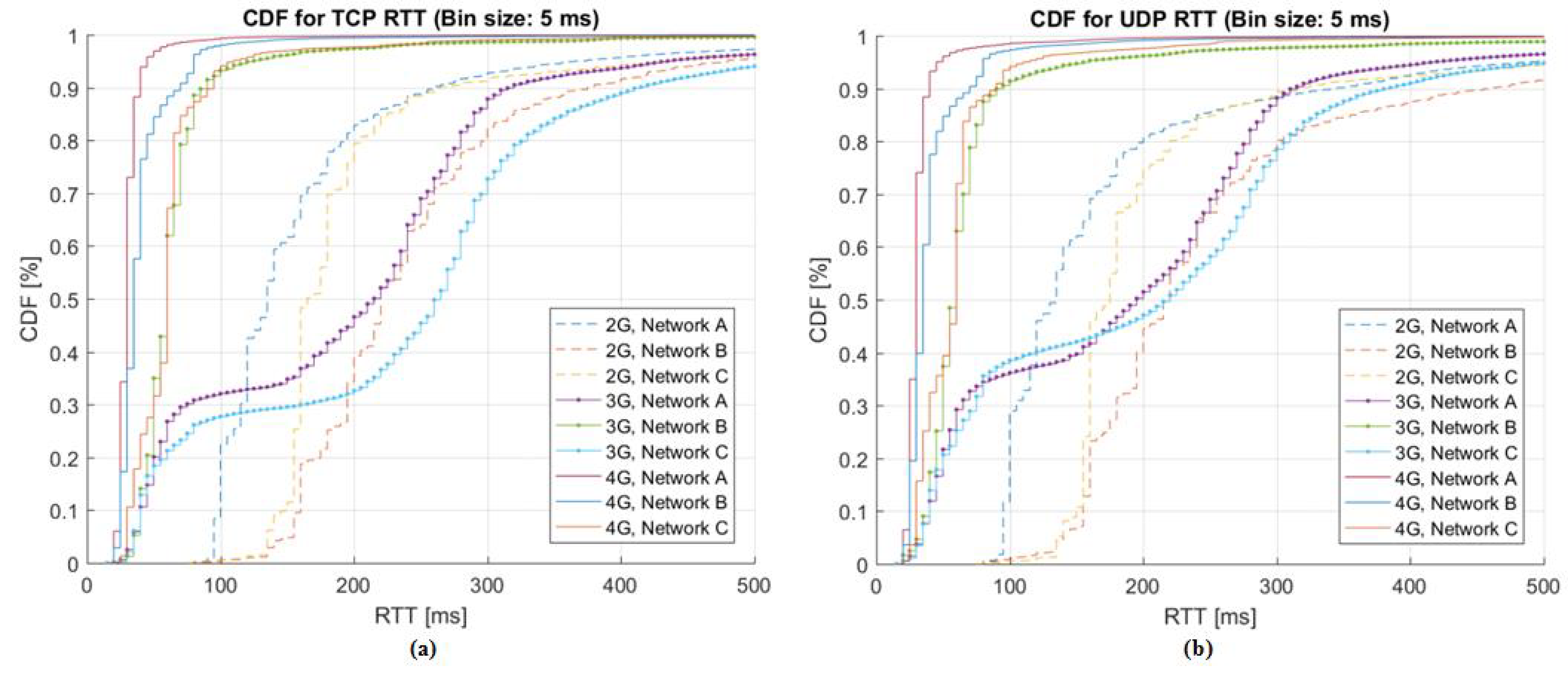
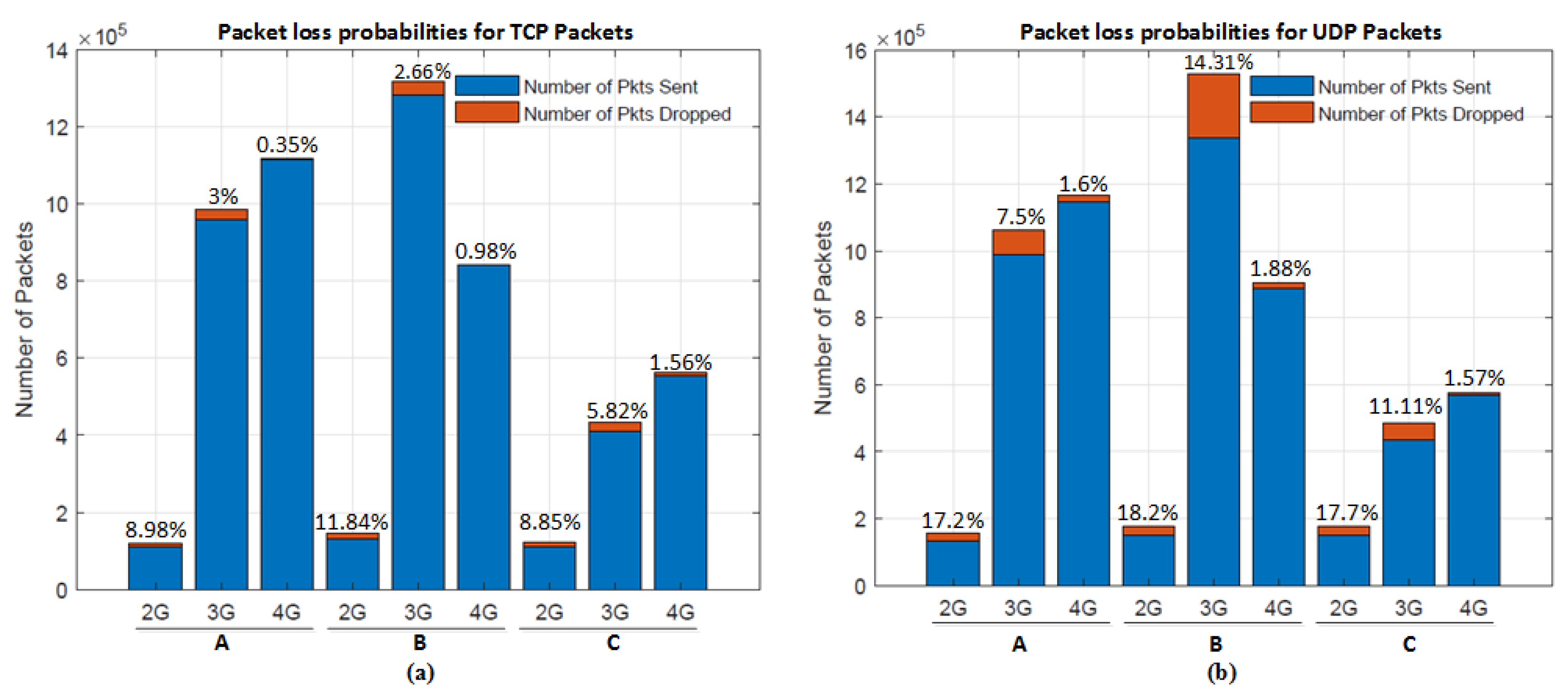
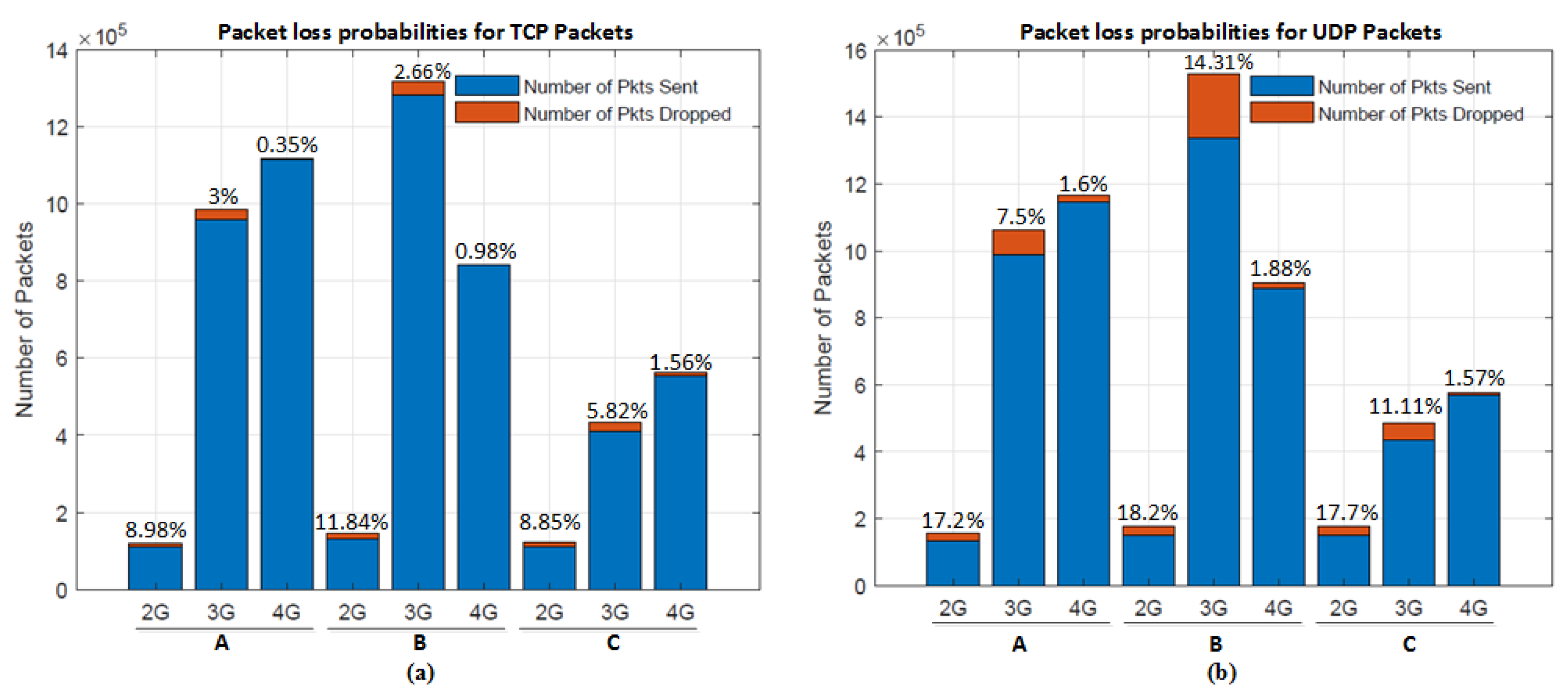
In Denmark there are three cellular networks (in reality four but two of them share cellular network resources) [
65]. The three networks (referred to as A, B and C in
Figure 2 and
Figure 3) are connected to the same internet exchange point, Danish Internet Exchange (DIX) [
65]. The measurement server is connected to the Danish research network, which also is connected DIX. This means that the performance of the different ISP networks can be compared because the measurements only differ in which ISP wireless and internal network they are performed on. The devices that perform the measurements are regular consumer smart-phones, which means that there are many factors that influence measurements. For instance, different applications on the devices consuming resources and utilizing the connection, as well as the mobility of measuring devices.
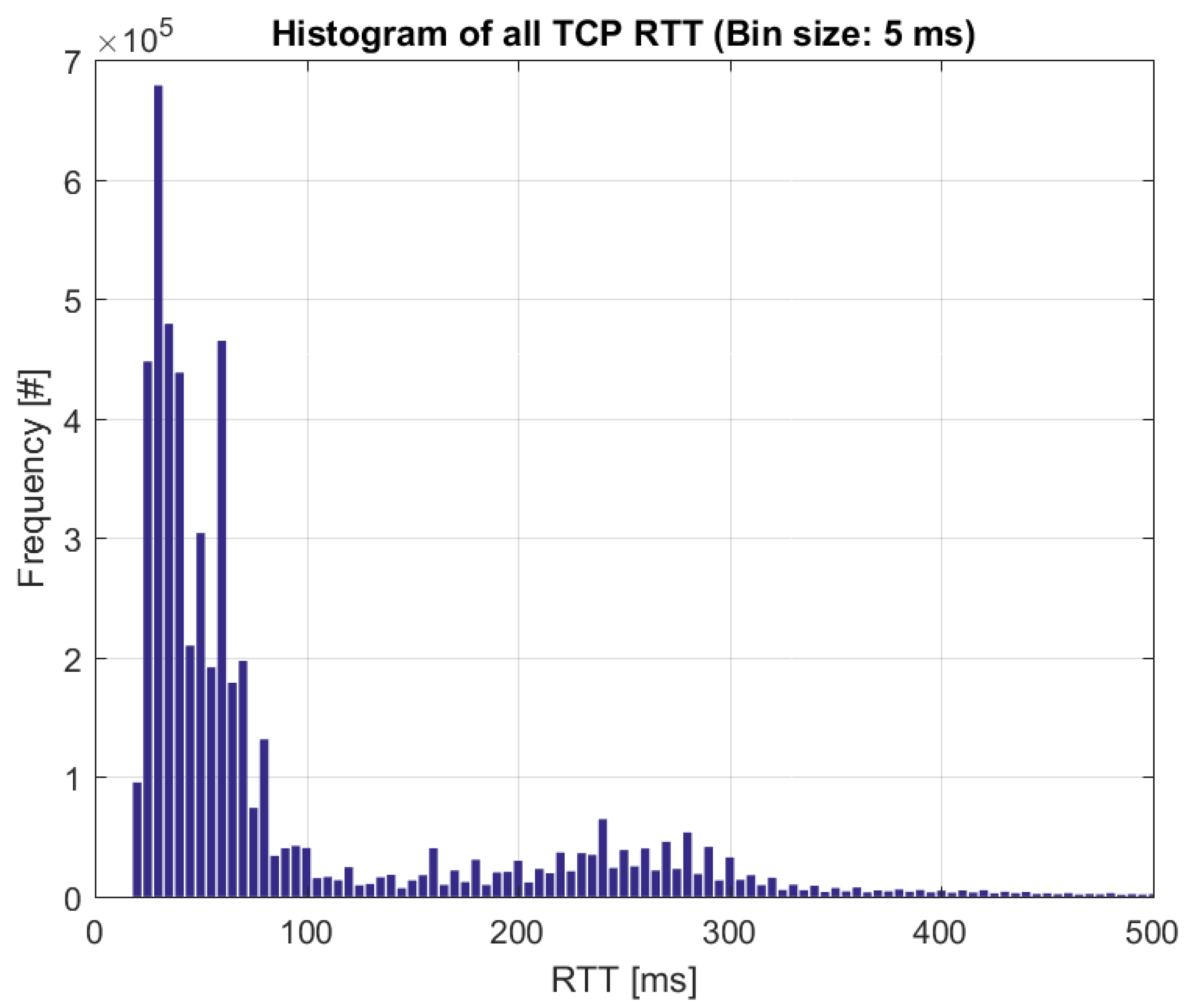
The measurements that are used in this context are RTT and signal strength measurements. RTT is measured using both UDP and TCP. A request packet is sent to the server that replies as fast as possible. The time between the request and the reply packets is logged as the RTT. Request/reply sequences are not overlapping and for TCP the connection handshake is done before the measurement is initiated. NetMap performs a set of measurements periodically, and for each period 20 RTT request/reply sequences are performed. The signal strength is logged for the currently active connection after the RTT measurement is done.
In the following, measurements from the three different ISP networks are presented, based on 2G, 3G and 4G technologies. These measurements are based on packet loss and RTT measured using several devices. The measurements are based on around 683000 RTT measurement sequences at different distances/locations of the end devices from the communication masts of different ISPs, capturing almost entire Denmark (for details, see [
63]). These measurements have been obtained over a period of one and a half year with varying number of end devices.
Figure 2 summarizes the results of RTT measurements from the three ISPs (based on 2G, 3G and 4G technologies) in terms of Cumulative Distribution Function (CDF) i.e., probability that RTT takes a value less than or equal to a certain range of time in milliseconds. While
Figure 3 shows the number of packets sent using three ISPs along with the packet drop probabilities in each case.
These NetMap-based measurements are highly useful as they provide realistic performance under realistic conditions from networks that are normally hard to obtain information from/about, and are relevant for e.g., operators (such as TSO) to assess their possibility to provide connectivity service to control systems. These measurements patterns have been used in testing the provision of online frequency control support service from WPPs (See
Section 5.3).
3. Use Case and Test Scenarios
This section presents the considerations and assumptions made related to the use case and test scenarios in this paper.
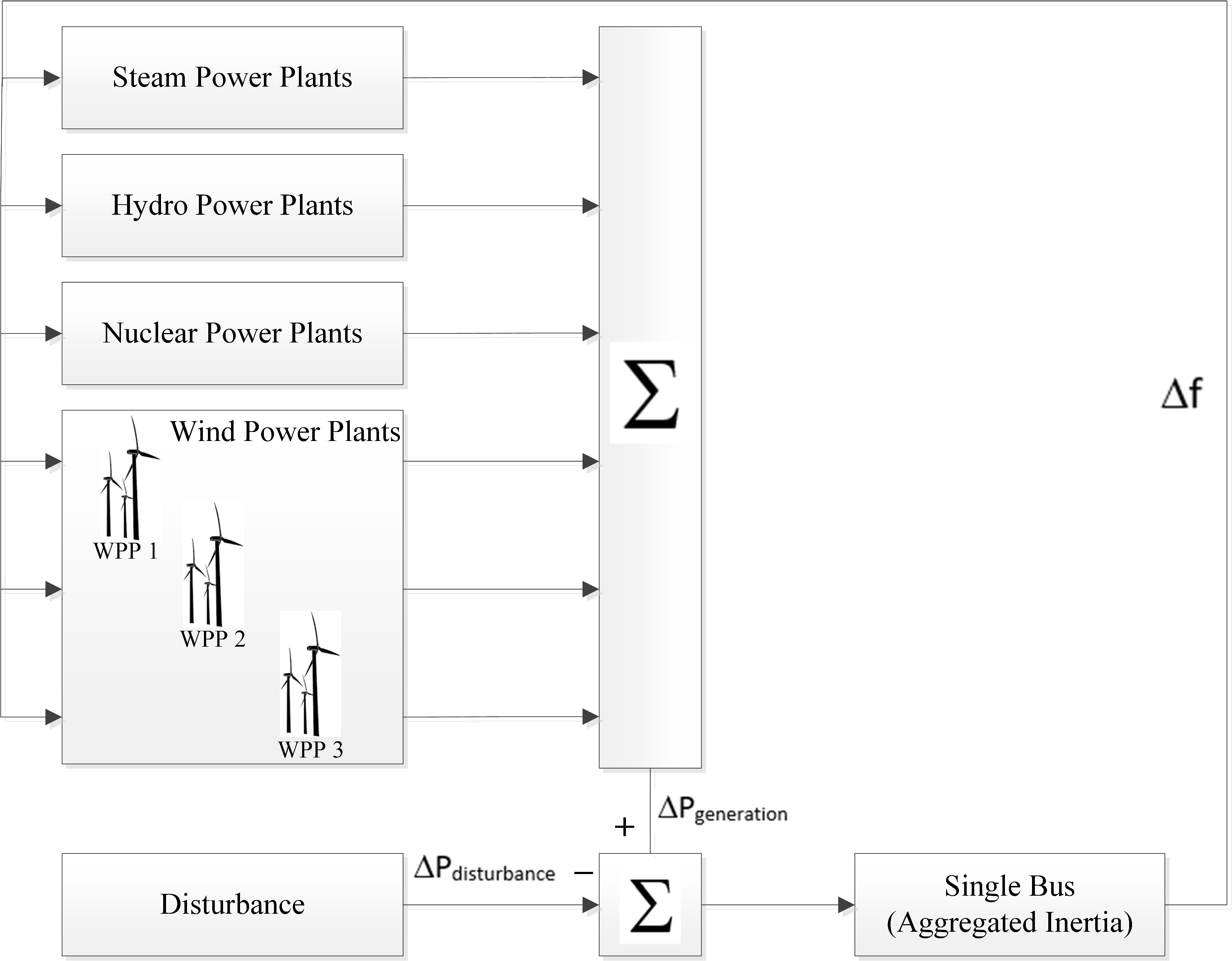
As a part of power production from ReGen plants, only WPP generation is considered. The contribution from other renewable sources (such as PVP) is also important; however, it is left for future research. (Note: In Denmark, out of the total generation capacity, wind energy is around 43%, while that from PVP is around 3% (to date) [
66]. The rest of power generation is contributed from steam, hydro and nuclear power plants, respectively.). For this paper, the wind power penetration is set to contribute 50% of the total generation. Although the power system model used in this paper can be evaluated for various wind power penetration levels, but this assumption is specifically made to comply with Denmark’s mid-term goal to achieve 50% power production from RES [
1]. (For more details of 50% wind power penetration level, see
Section 5.1).
The real power system in Denmark does not consist of a single WPP [
66]. Similarly, around the globe, depending on the system size, there are several WPPs connected to the grid and operate at different operating conditions as the prevailing wind speed varies geographically. It is, therefore, valuable to investigate how combined frequency support from multiple WPPs performs under varying network conditions. For this reason, there are three WPPs connected to the power system. These WPPs are divided into offshore and onshore WPPs. Based on the size of a WPP, the onshore WPPs are further subdivided into two groups. These groups depict the future Danish power system with major contribution from wind power plants of different sizes. The three WPP groups are assumed to have equal share of power generation, see
Table 1:
When kinetic energy of a wind turbine is used, there can be a reduced active power output at the recovery period depending on the wind speed [
21]. According to [
67], Denmark is one of the major areas in European communities that have a high wind energy resource. However, in a small country like Denmark, the wind speeds tend to be almost the same throughout its territory, while in larger interconnected systems varying wind speeds can occur in different parts [
67,
68]. Therefore, from the range of wind speed distribution found in Denmark [
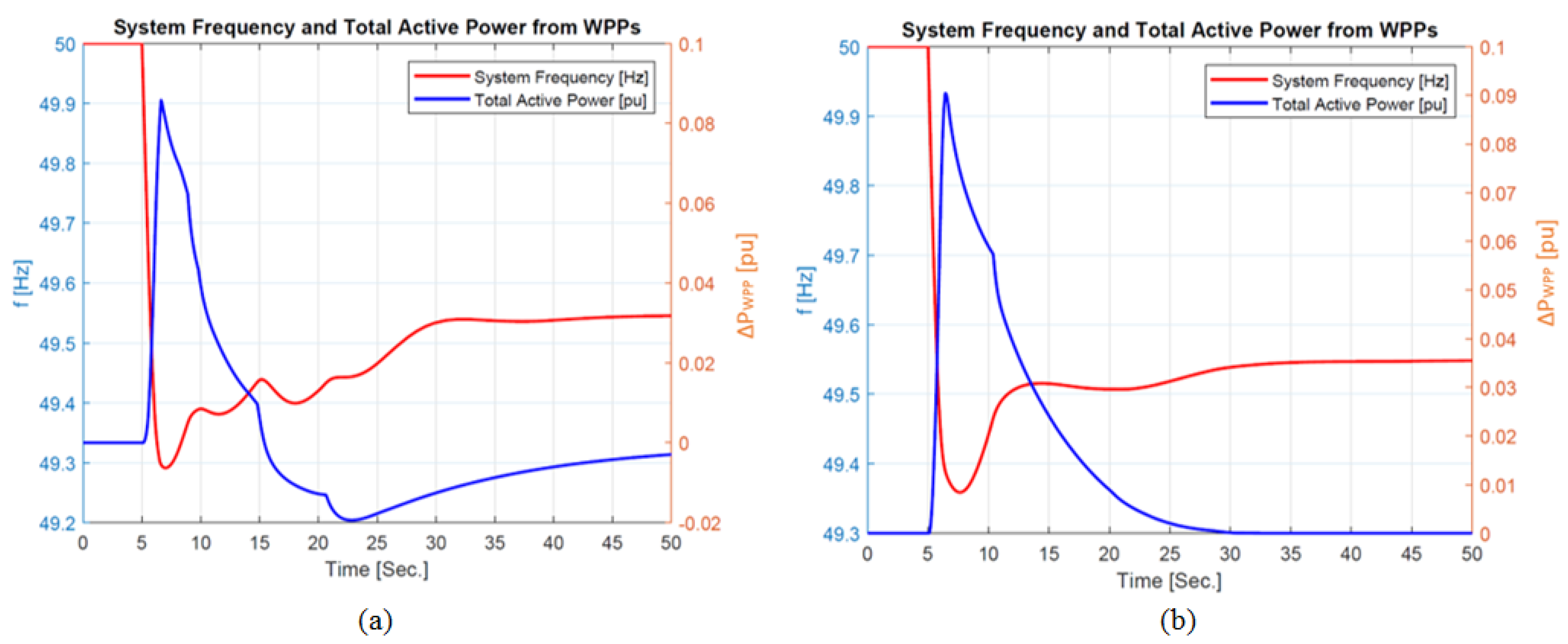
69], two instantaneous wind speeds (7 and 14 m/s) are selected to test the impact of communication on frequency control support from WPPs. Choosing these wind speeds will cover a large part of a typical wind speed distribution found in Denmark [
69]. Here, 7 m/s is the wind speed corresponding to partial loads in the WT, while 14 m/s wind speed corresponds to full loading (full power production). Hence, the results of this paper will be applicable over a wide range of operating points encountered during the normal operation of WPPs in Northern Europe.
It is also pertinent to mention here that the tests cases in this paper are based on the assumption that all WPPs are operating under the same wind regimes (i.e., all WPPs are experiencing the same wind speed at a time). However, as a part of future research, the impact of ICT on frequency control coordination from WPP with non-uniform wind speeds will be explored.
Table 2 shows the two wind speeds-based test cases for both onshore and offshore WPPs.
While connecting the WPP to a control center, a network can either be private or public. Private networks are fully owned and the cross traffic can be easily managed. In fact, if the only entities allowed on the network are those with time critical data, then in most cases (i.e., cables are not physical cut, the wireless frequency is not directly jammed by external sources, etc.) data will be reliably transported fast and efficient with most modern communication technology. However, this is an extremely expensive and inefficient solution. Additional traffic can obviously be put on the network, but the routers in between that take care of the traffic ending at the right address must be able to differentiate between packets, i.e., provide Quality of Service (QoS), which requires configuration and management. Owning the network enables full control of QoS settings but is costly and requires proper manning and expertise to operate and maintain the network. Further, private networks are for security reasons more likely to be standalone, disabling communication and data exchange beyond certain boundaries, which for some applications is a degradation. For instance, remote monitoring or control of systems are often not possible outside control rooms due to physical separations of external networks.
On the other hand, public networks refer to the networks that are operated by e.g., tele-operators or any other third party company or service provider, which has the expertise and manning to operate the network, routers, etc. In such networks, internals of the network are not to be taken care of by the end user, thus, can enjoy data being transported from source to destination in most cases at best effort. Only limited possibility to control QoS settings are given if additional money is paid. Tele-operators work with the concept of M2M communication, which allows certain timely and reliability requirements to be satisfied since traffic is internally prioritized effectively for transportation. It is worth noting that it is only the case as long the data traffic stays within boundaries of the given tele-operator. If data goes outside the domain of the tele-operator, then QoS is most likely to be lost, thus, time and packet loss rates cannot be guaranteed. However, public networks are cheap and flexible, but suffer to the extend that these have to be shared among millions of other customers, hence exposes data exchange to stochastic non-controllable delays and packet drops.
Since the size of offshore WPPs in this paper is considered to be above 100 MW i.e., large wind power plants, the network connection is set to be private, so that high QoS in terms of fixed deterministic delay as well as other communication properties can be guaranteed. While for the onshore WPPs, both private as well as public network connections are considered in the test cases. Furthermore, as an ideal case, a test scenario with all private connections is considered to guarantee high QoS in communication. (see
Table 3).
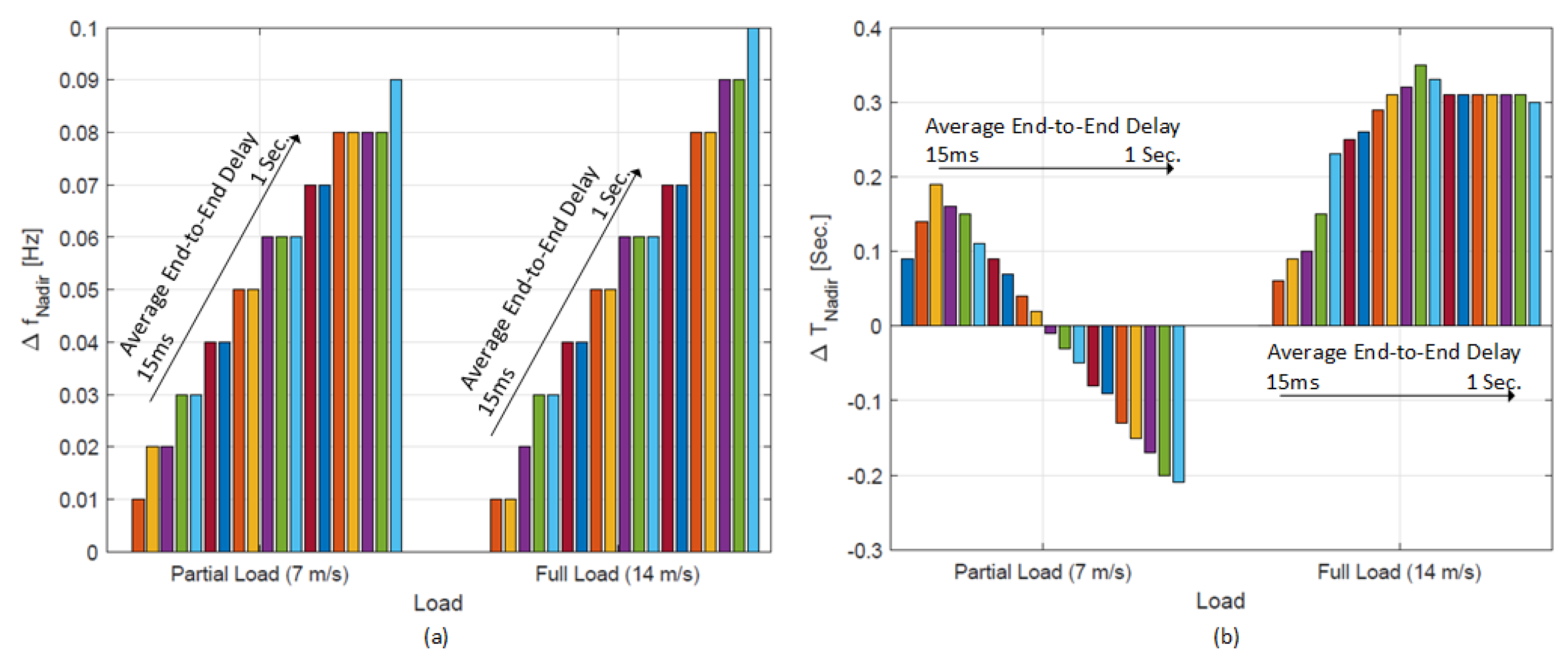
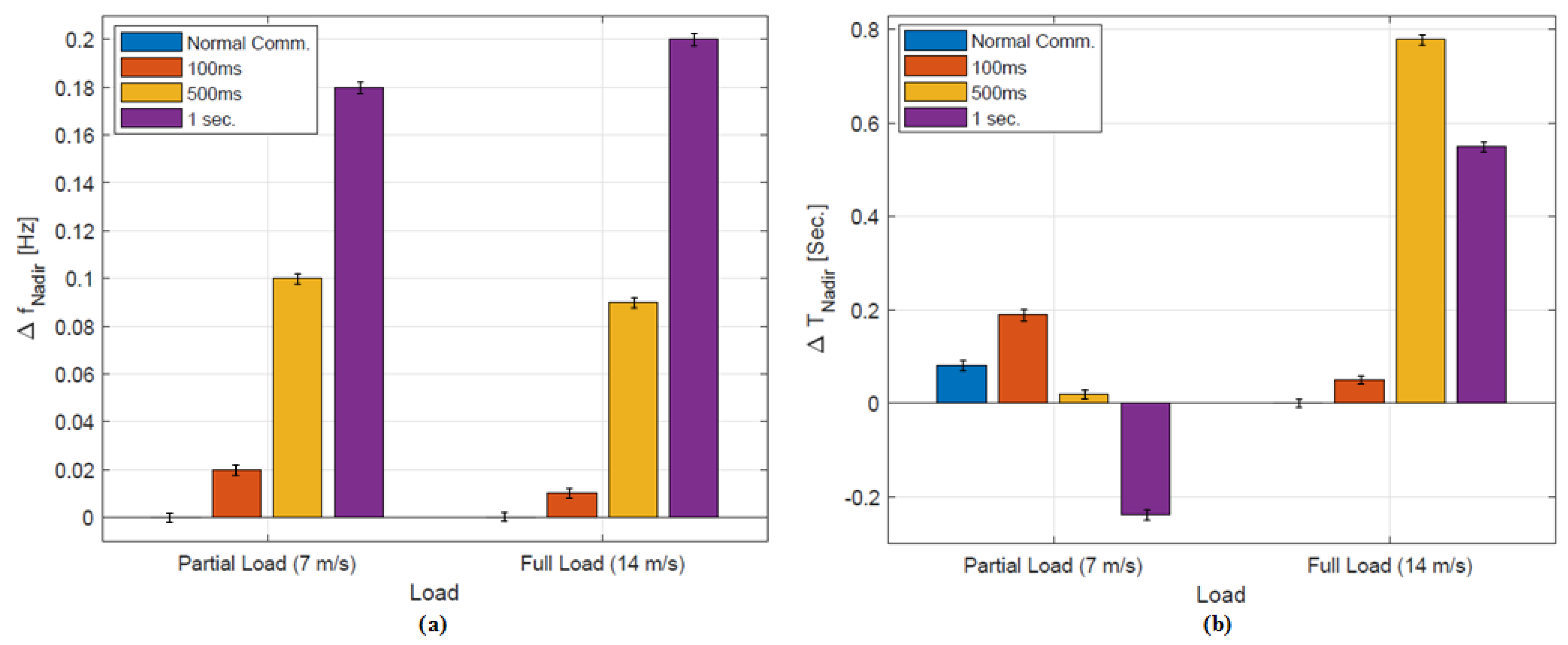
4. Evaluation Criteria—Key Performance Parameter (KPI)
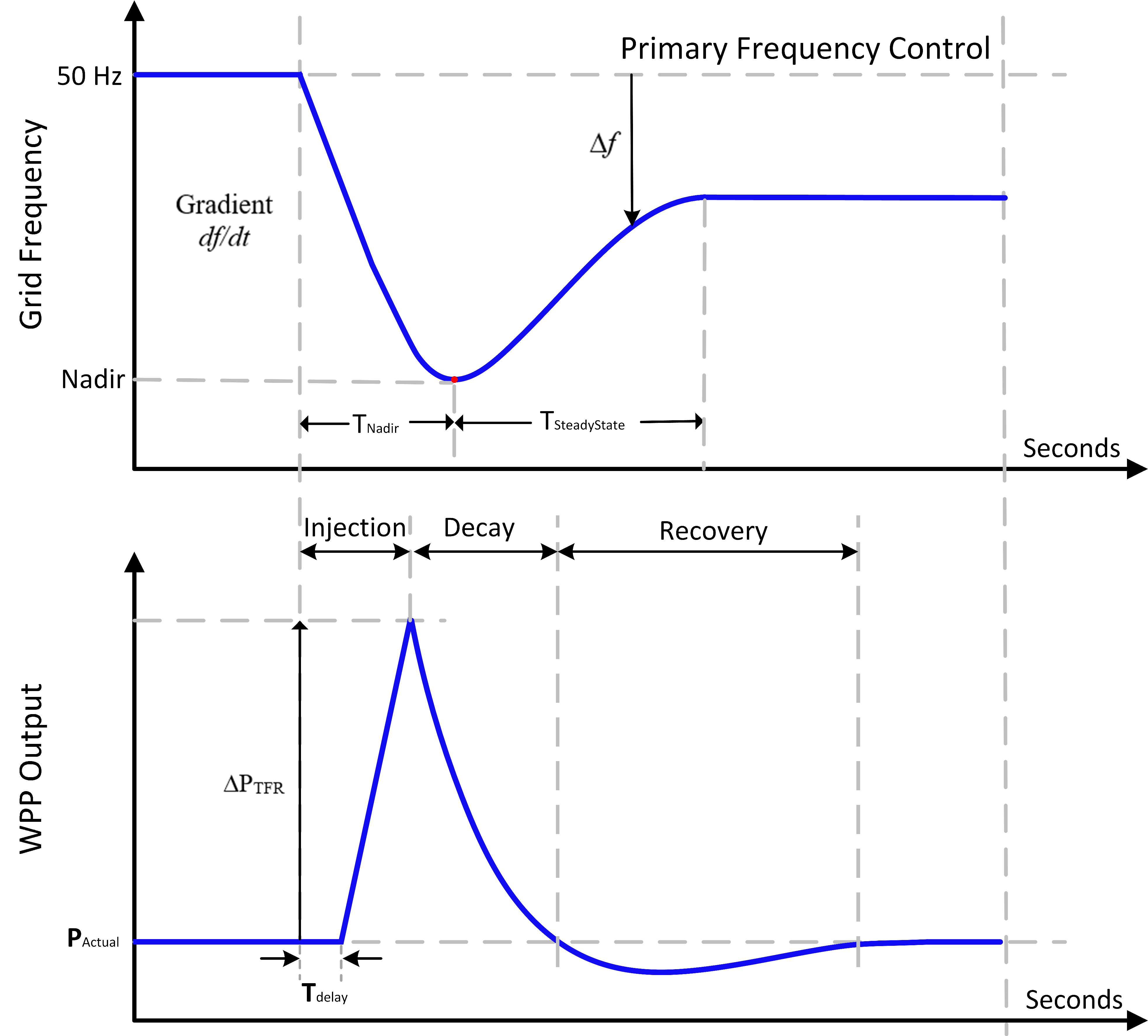
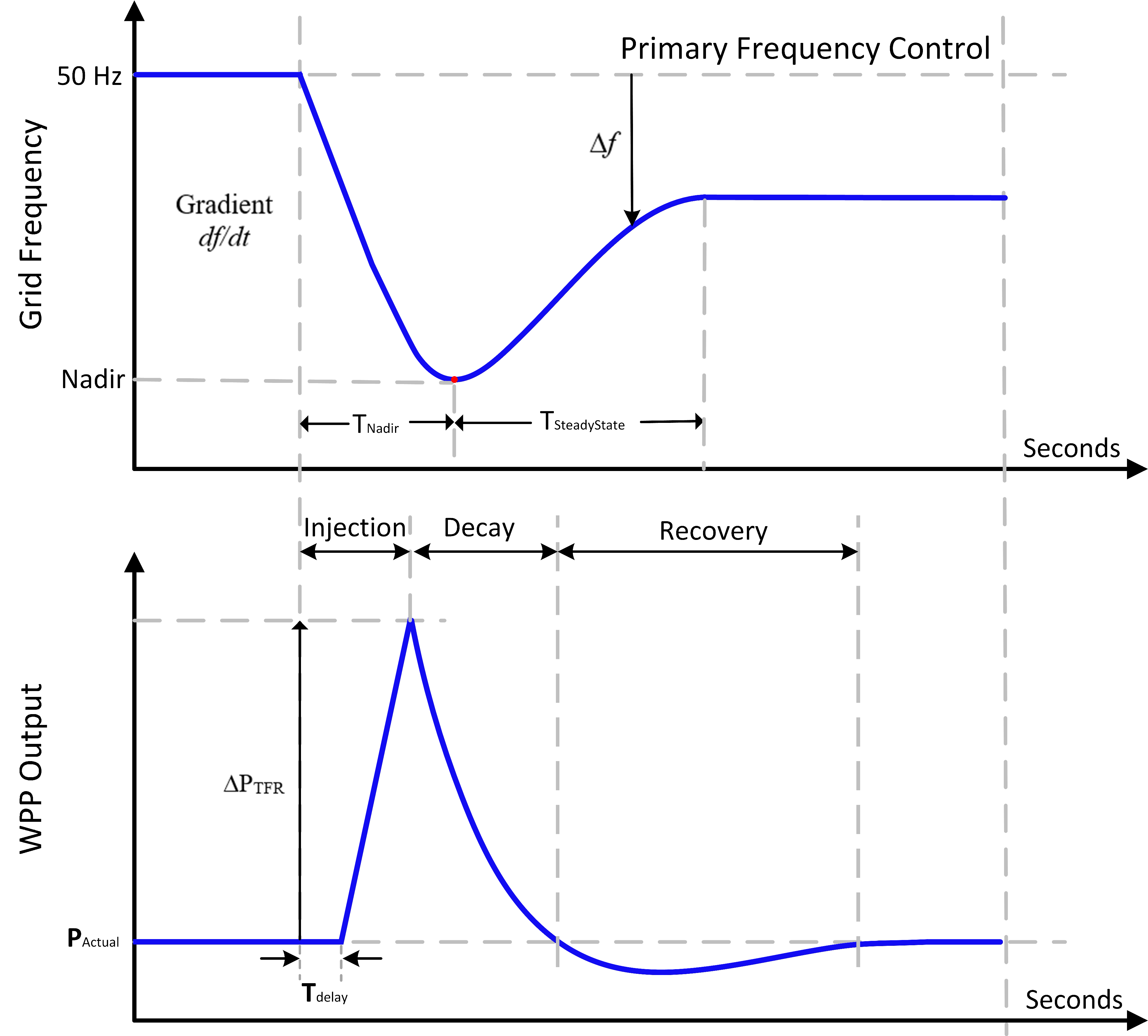
The results of each test scenario will be discussed and evaluated with regards to the following three important frequency metrics for the operation of a power system (see
Figure 4) [
46]:
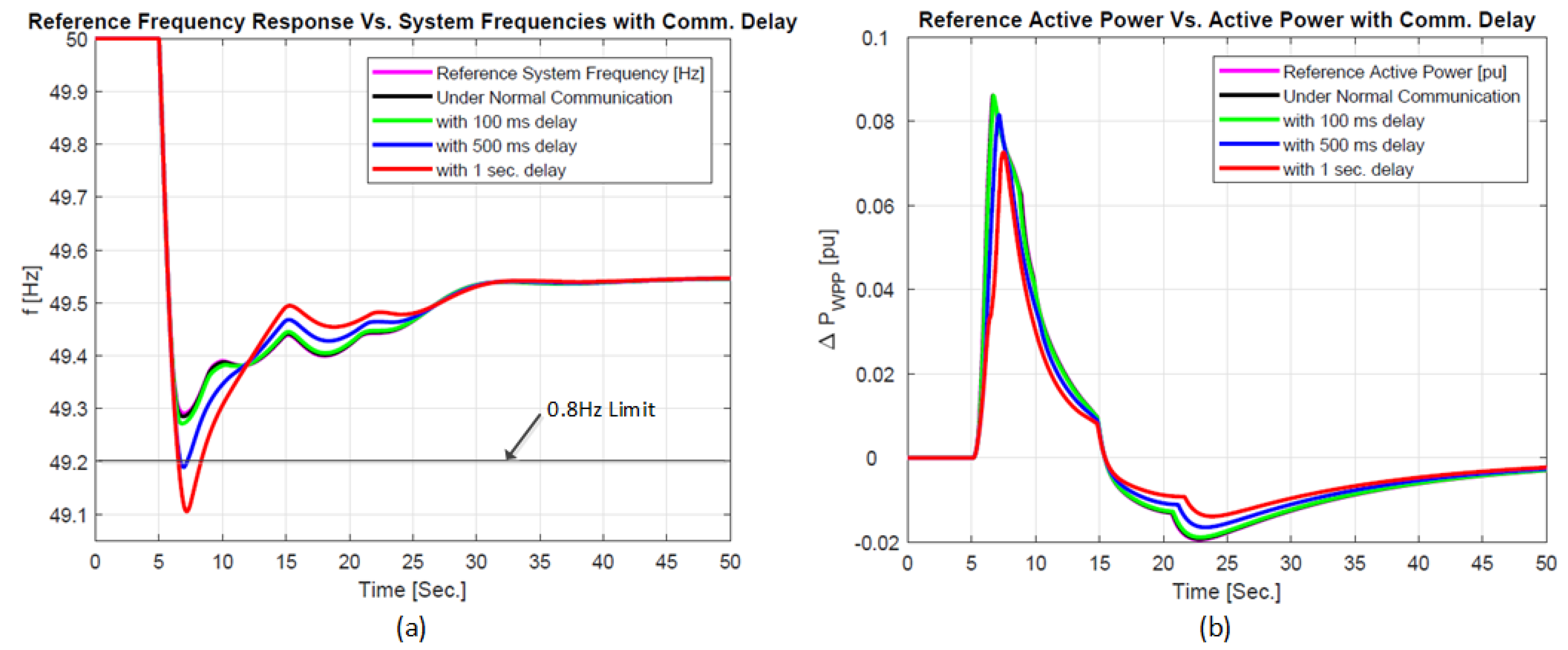
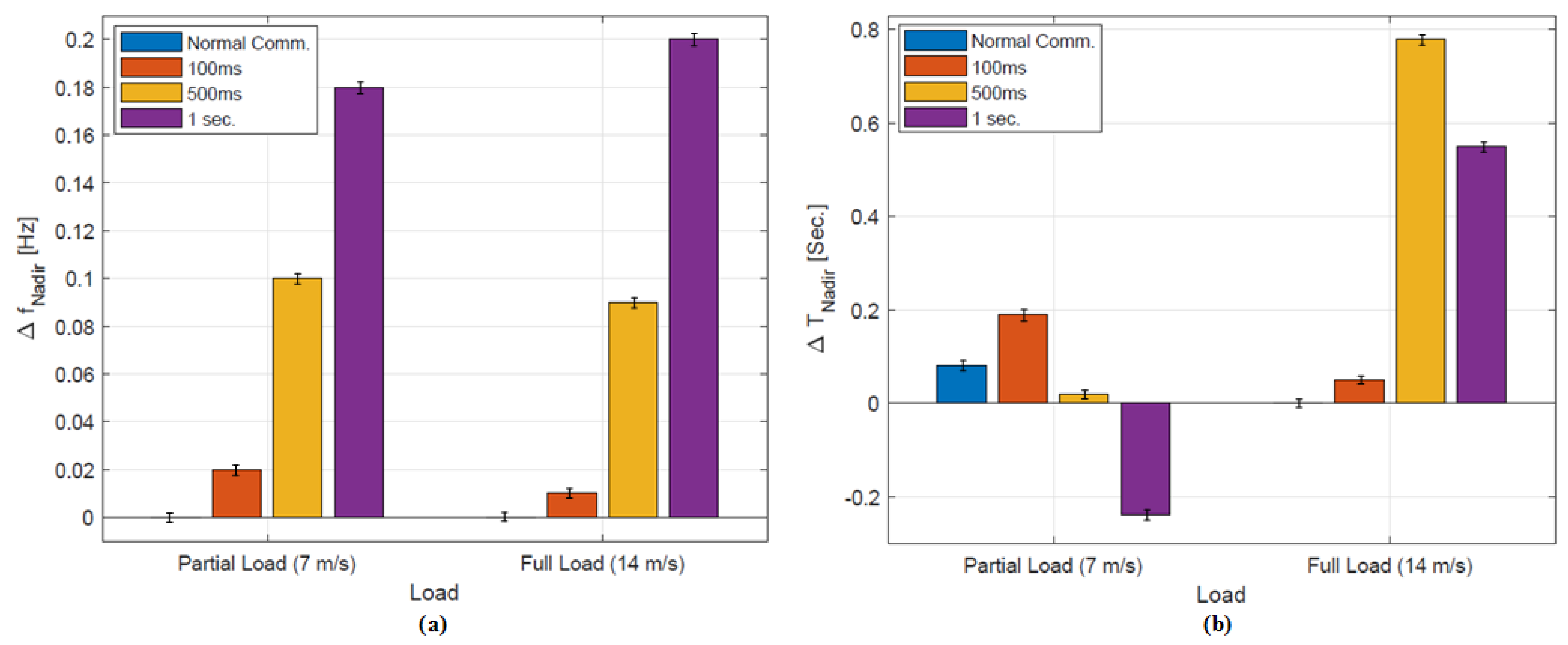
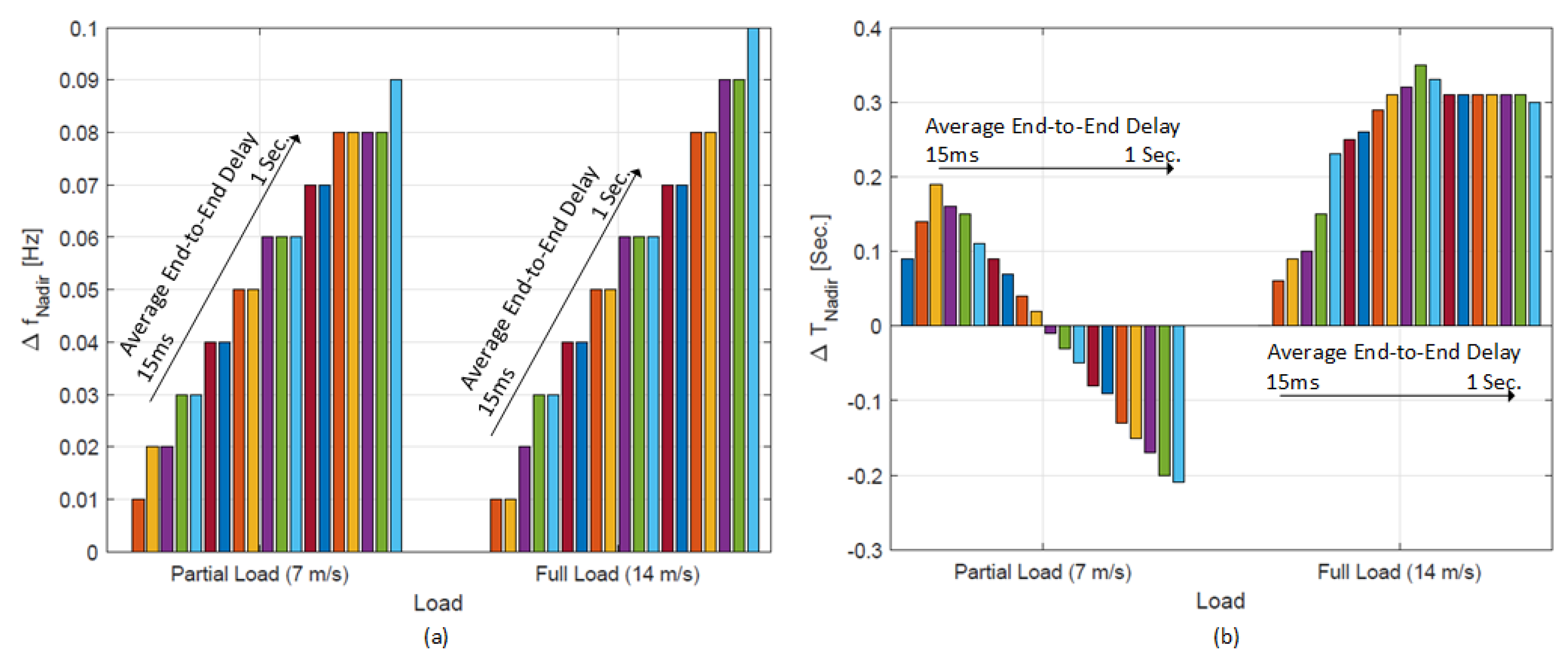
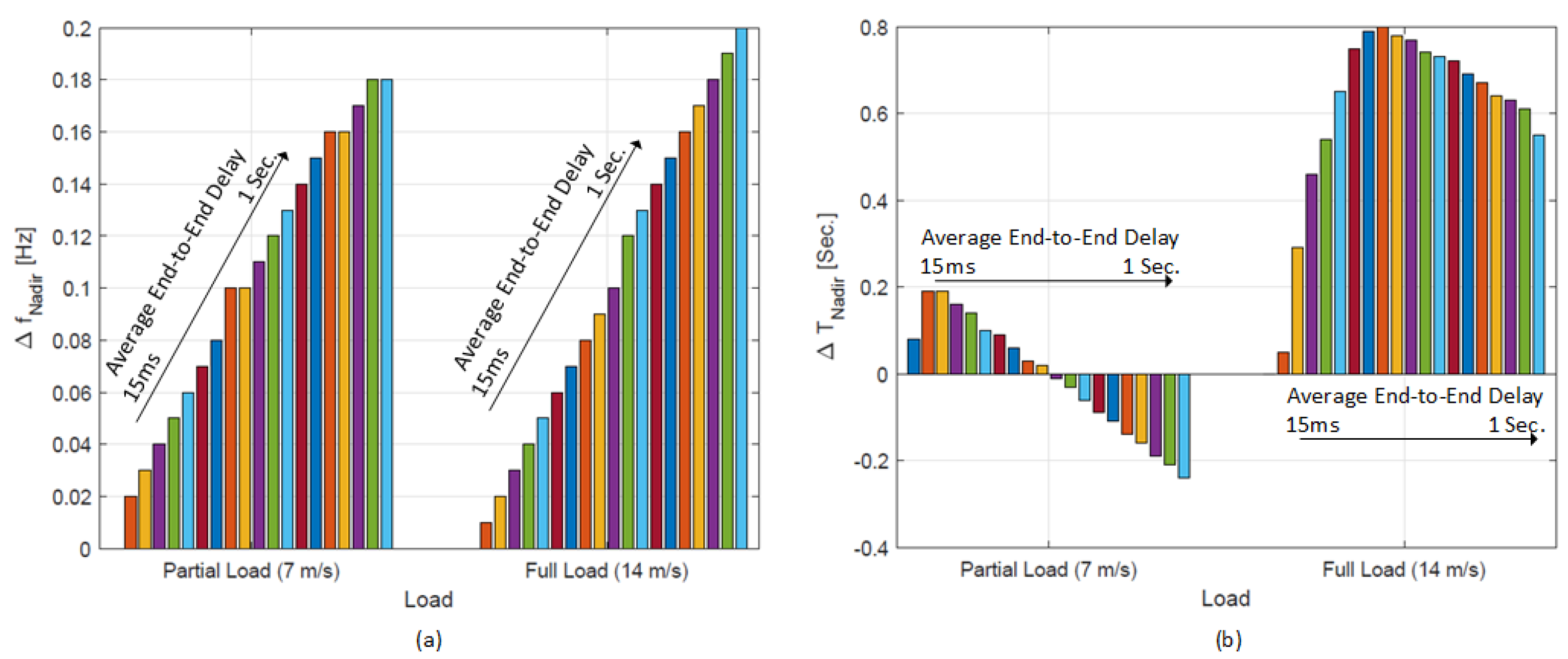
Frequency Nadir ()
It describes the minimum point reached by the frequency after a disturbance (see
Figure 4). This metric is important as too low values might trigger protection devices. An improved frequency response should therefore increase the frequency nadir, i.e., reduce the maximum frequency deviation. Due to the under-frequency load shedding limits, the value of
is fixed around 0.8 Hz in systems with 50 Hz operational frequency [
20], while it is 0.9 Hz in systems with 60 Hz operational frequency [
20].
Time to reach frequency nadir ()
It is related to the system inertia. The earlier the nadir is reached, the more energy is released directly after the disturbance. It is, therefore, preferable to reduce
(see
Figure 4), as it can also have an impact on primary and secondary control.
Time to reach steady state frequency ()
Since the goal of primary frequency control is to contain the frequency to a new steady state after the disturbance and thereby reduce the dynamic part of the response, a quicker return to steady state is favourable. Therefore, an improvement in the frequency support is indicated by a smaller value of
(see
Figure 4).
7. Conclusion and Recommendations
This paper assesses the impact of ICT on the frequency control support (FFR) from ReGen plants, with special focus on WPPs. Considerations on main characteristics of delays in public and private networks are shown using real measurements. Various delays according to statistical measurements on traffic are also considered. A coordination scheme for FFR including parameters as proposed in [
46] is considered for analysis. Two operating conditions of wind power plants are taken into consideration namely partial and full load respectively.
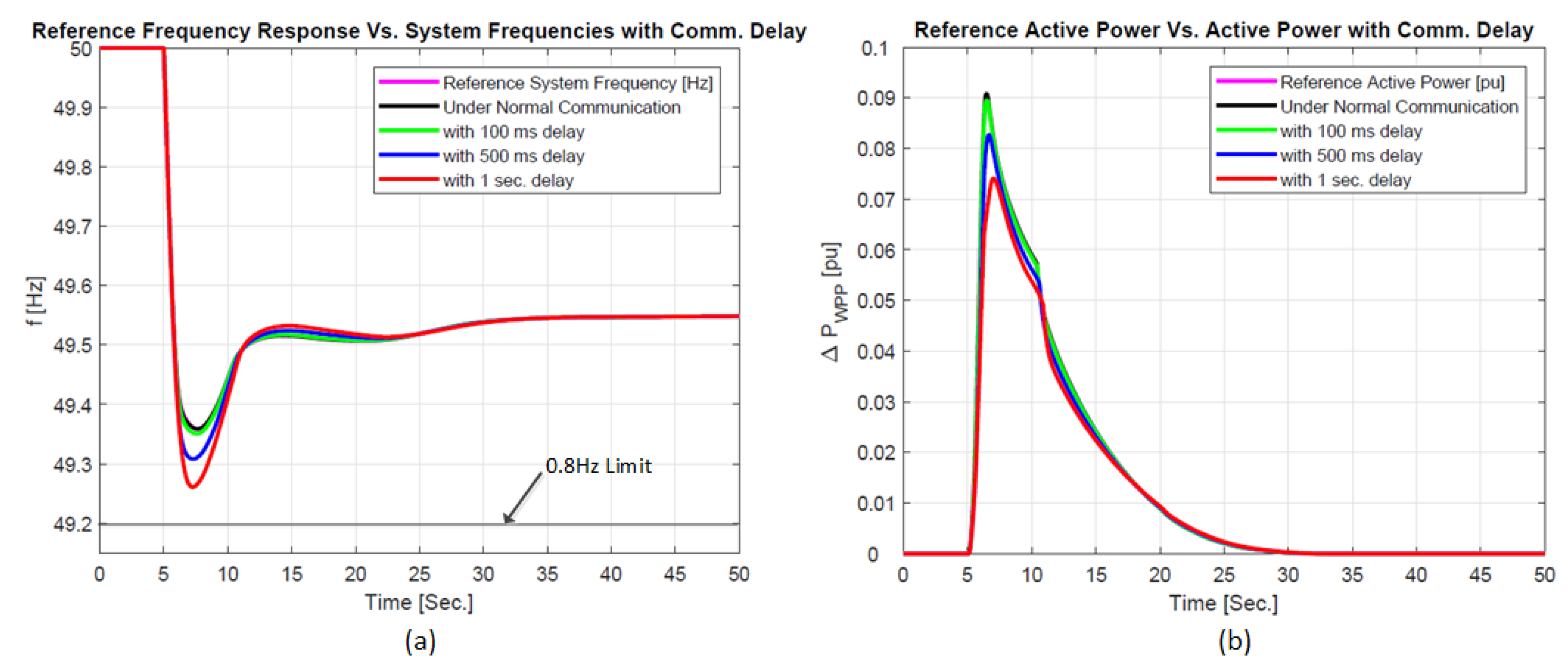
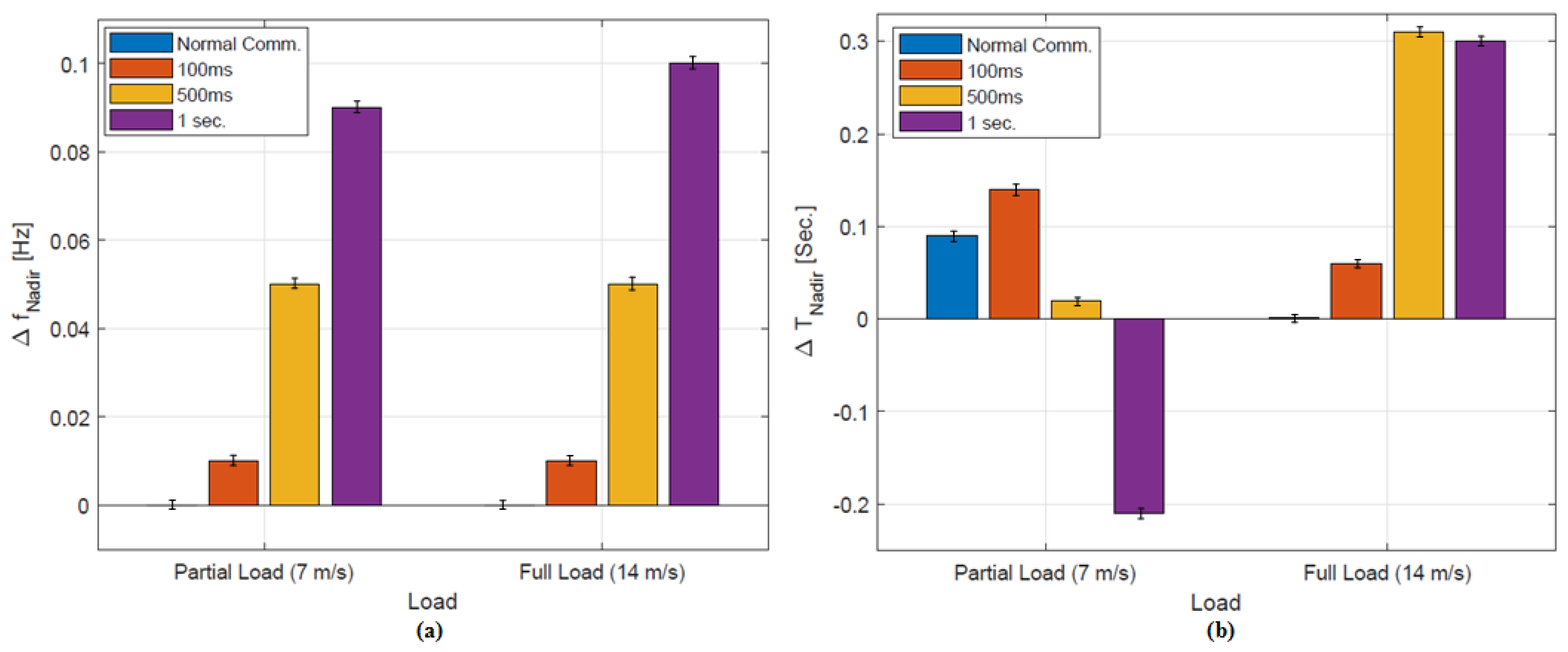
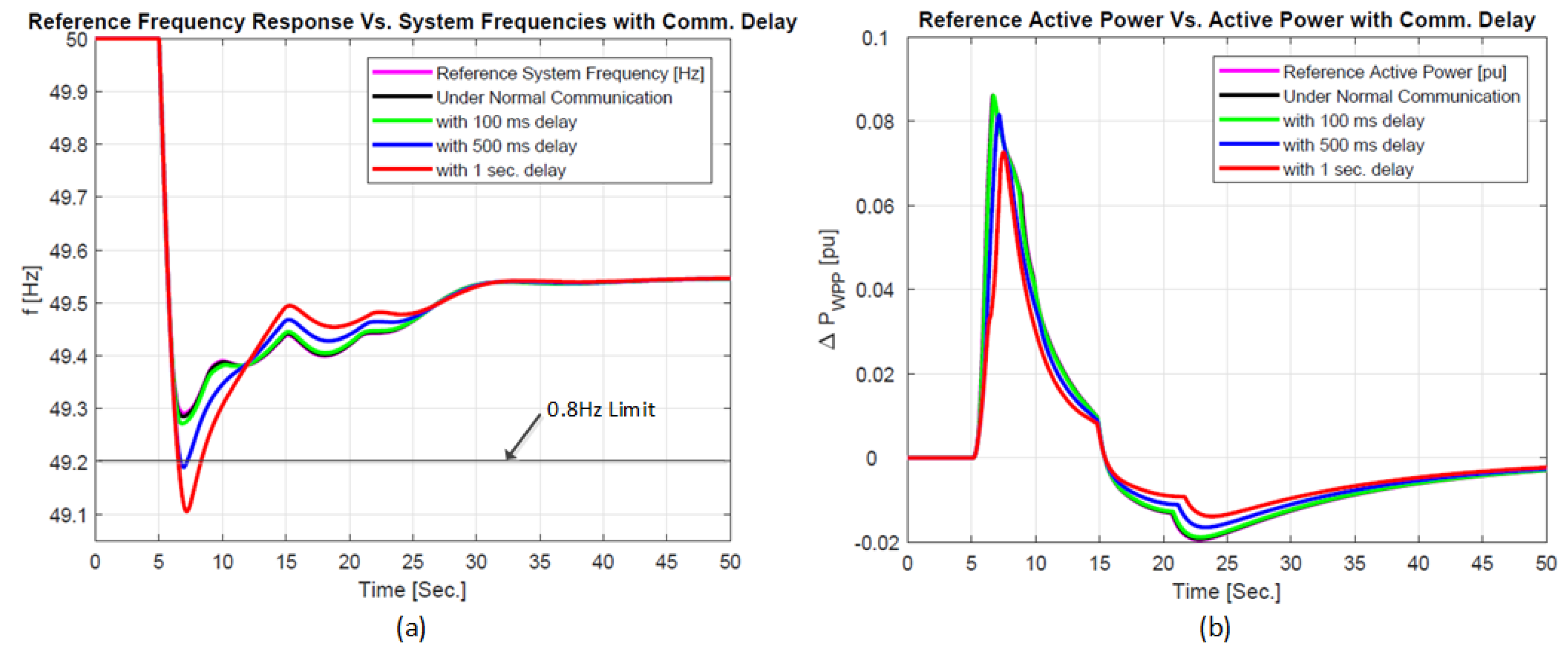
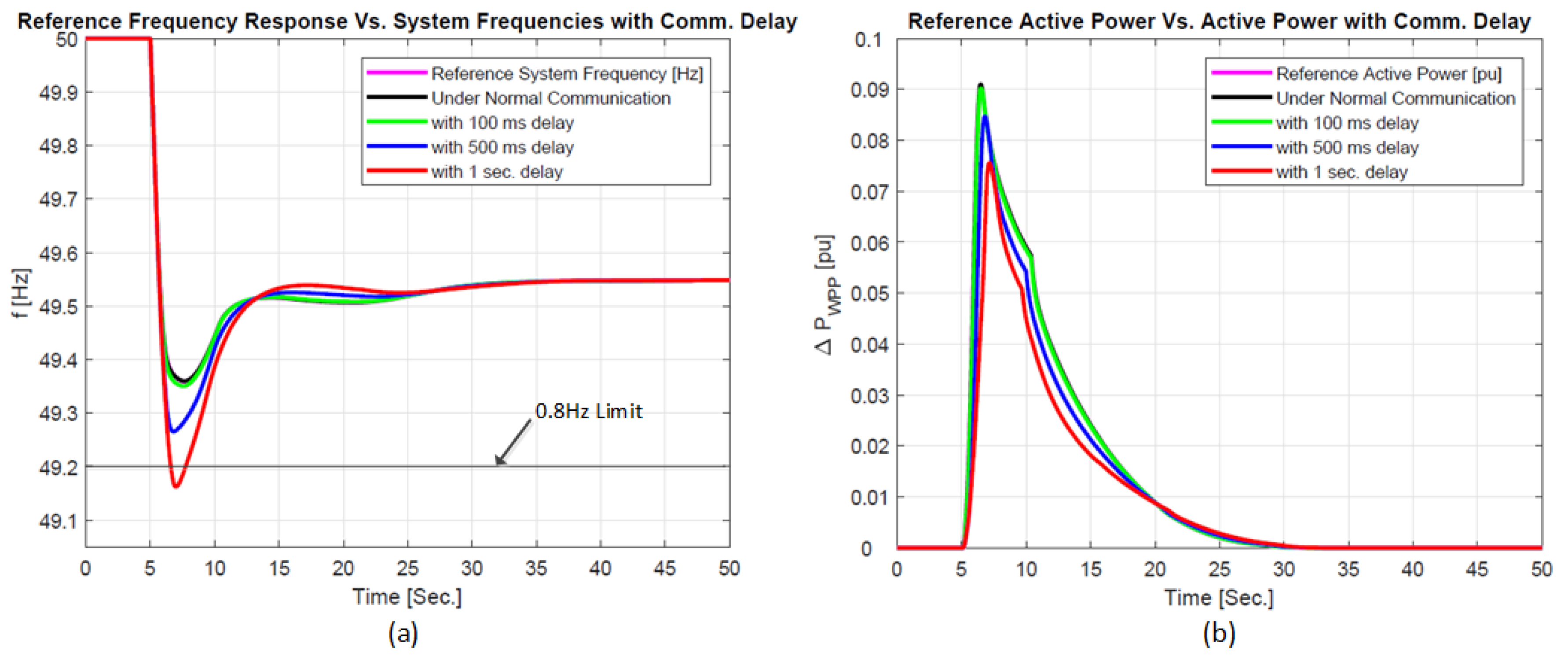
The study reveals that in normal circumstances, private as well as public cellular-based networks can support the provision of primary frequency control from WPP. However, in case of a disturbance, communication delays have a large impact on the overall response of ReGen plants on system frequency response as frequency nadir and time to reach it decrease with increasing network delays. Therefore, communication delays and their mechanisms must be considered in the design process of the proposed coordinated frequency control in [
46]. Further, it has been ascertained that public networks are more prone to affect the overall frequency response due to stochastic nature of the delays compared to private ones where the delays are fixed and have low values. Based on the findings of this study, it is recommended that the design and tuning methodology for frequency control must account for the communication properties, such as delays in ICT especially when using public networks. Similarly, coordination and activation of ReGen plants for provision of frequency control must account for the ICT delays.
Additional work is required in order to get more insight on the impact of ICT on fast frequency response, such as: (
a) account for a realistic power system model that takes into account transmission lines and ReGen plants location and thus a realistic mapping of ICT layer, (
b) consider other control schemes and coordination methods in-line with the new ENTSO-E recommendations given in [
74]. The current preliminary studies were done without employing control Hardware-In-the-Loop (HIL) framework where dedicated network emulators are used to capture performance and characteristics of a selected communication network technology. However, as a natural future step of the present investigation, these aspects will be addressed by implementing the described scenario in a dedicated HIL framework with the validation of two ancillary services from ReGen i.e., frequency restoration reserve (FRR, also known as secondary control) using a detailed model of the power grid e.g., modified 12-bus systems, and frequency containment reserve (FCR, also known as primary control).

 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}