Fuzzy Supervision Based-Pitch Angle Control of a Tidal Stream Generator for a Disturbed Tidal Input

 ,
, 
 ,
, 
Abstract
1. Introduction
2. Alderney Race Tidal Site Profile
3. Model Statement
3.1. Tidal Turbine Model
3.2. Mechanical Shaft Model
3.3. Electrical Model
3.4. Power Converters Model
4. Control Strategies
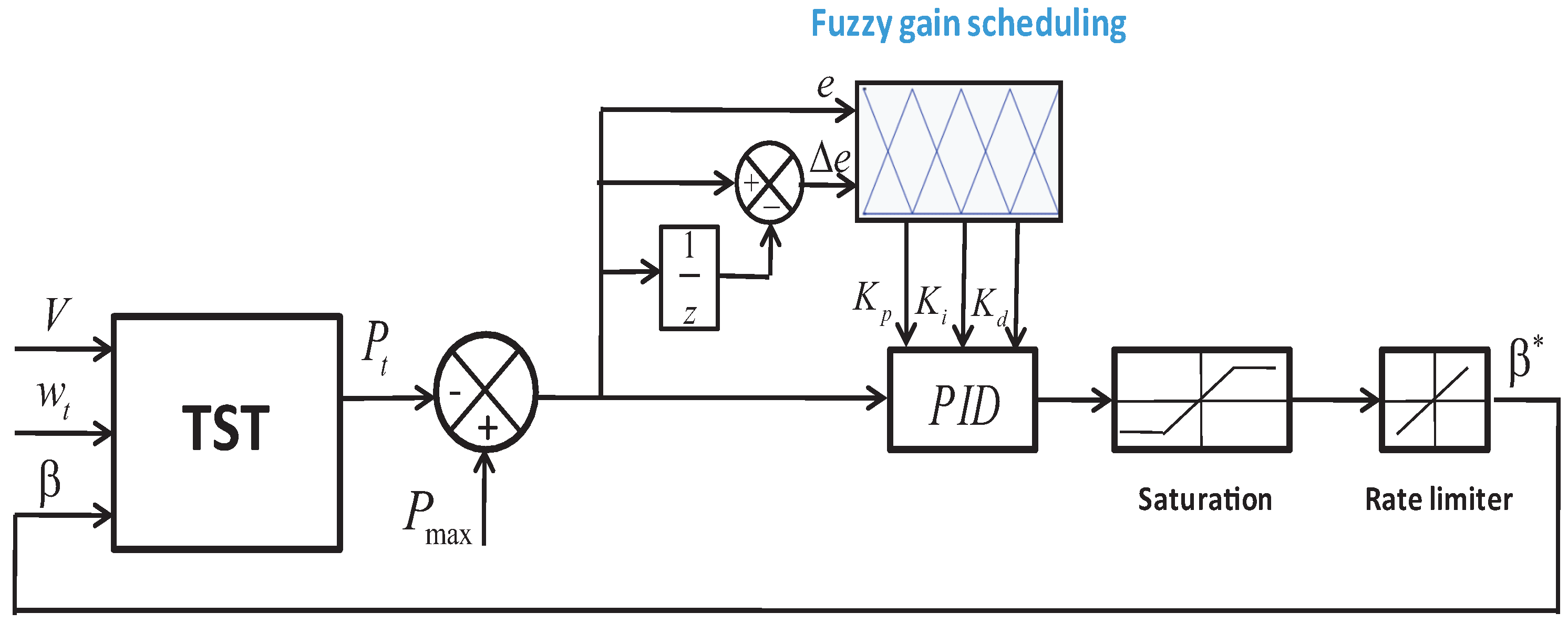
4.1. Pitch Angle Control
4.2. Rotational Speed Control
4.2.1. RSC Control Design
4.2.2. GSC Control Design
5. Validation Results and Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- International Energy Outlook 2016. International Energy Outlook 2016 With Projections to 2040; Tech. Report; U.S. Energy Information Administration, Office of Energy Analysis U.S. Department of Energy: Washington, DC, USA, 2016.
- Panwar, N.L.; Kaushik, S.C.; Kothari, S. Role of renewable energy sources in environmental protection: A review. Renew. Sustain. Energy Rev. 2011, 15, 1513–1524. [Google Scholar] [CrossRef]
- Ellabban, O.; Abu-Rub, H.; Blaabjerg, F. Renewable energy resources: Current status, future prospects and their enabling technology. Renew. Sustain. Energy Rev. 2014, 39, 748–764. [Google Scholar] [CrossRef]
- Frondel, M.; Ritter, N.; Schmidt, C.M.; Vance, C. Economic impacts from the promotion of renewable energy technologies: The German experience. Energy Policy 2010, 38, 4048–4056. [Google Scholar] [CrossRef]
- Grino Colom, M. Power Generation From Tidal Currents; Application to Ria de Vigo; Escola de Comins, Departament d’Enginyeria Hidraulica, Maritima i Ambiental (DEHMA): Barcelone, Spain, 2015. [Google Scholar]
- Shapiro, G.I. Effect of tidal stream power generation on the region-wide circulation in a shallow sea. Ocean Sci. 2011, 7, 165–174. [Google Scholar] [CrossRef]
- Zhu, G.; Lin, Z.H.; Jing, Q.; Bai, P.; Pan, C.; Yang, Y.; Zhou, Y.; Wang, Z.L. Toward large-scale energy harvesting by a nanoparticle-enhanced triboelectric nanogenerator. Nano Lett. 2013, 13, 847–853. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Lin, L.; Wang, Z.L. Nanoscale triboelectric-effect-enabled energy conversion for sustainably powering portable electronics. Nano Lett. 2012, 12, 6339–6346. [Google Scholar] [CrossRef] [PubMed]
- Uihlein, A.; Magagna, D. Wave and tidal current energy—A review of the current state of research beyond technology. Renew. Sustain. Energy Rev. 2016, 58, 1070–1081. [Google Scholar] [CrossRef]
- Esteban, M.; Leary, D. Current developments and future prospects of offshore wind and ocean energy. Appl. Energy 2012, 90, 128–136. [Google Scholar] [CrossRef]
- APEC Energy Working Group. Marine and Ocean Energy Development An Introduction for Practitioners in APEC Economies; Technical Report; Institute of Lifelong Education: Moscow, Russia, 2013.
- Collin, A.J.; Nambiar, A.J.; Bould, D.; Whitby, B.; Moonem, M.A.; Schenkman, B.; Kiprakis, A.E. Electrical Components for Marine Renewable Energy Arrays: A Techno-Economic Review. Energies 2017, 10, 1973. [Google Scholar] [CrossRef]
- Inger, R.; Attrill, M.J.; Bearhop, S.; Broderick, A.C.; Grecian, W.J.; Hodgson, D.J.; Godley, B.J. Marine renewable energy: Potential benefits to biodiversity? An urgent call for research. J. Appl. Ecol. 2009, 46, 1145–1153. [Google Scholar] [CrossRef]
- Blackmore, T.; Myers, L.E.; Bahaj, A.S. Effects of turbulence on tidal turbines: Implications to performance, blade loads, and condition monitoring. Int. J. Mar. Energy 2016, 14, 1–26. [Google Scholar] [CrossRef]
- Walker, S.; Cappietti, L. Experimental Studies of Turbulent Intensity around a Tidal Turbine Support Structure. Energies 2017, 10, 497. [Google Scholar] [CrossRef]
- Wright, J.; Colling, A.; Park, D. (Eds.) Waves, Tides, and Shallow-Water Processes; Gulf Professional Publishing: Houston, TX, USA, 1999; Volume 4. [Google Scholar]
- Zhou, Z.; Benbouzid, M.; Charpentier, J.F.; Scuiller, F.; Tang, T. A review of energy storage technologies for marine current energy systems. Renew. Sustain. Energy Rev. 2013, 18, 390–400. [Google Scholar] [CrossRef]
- Ghefiri, K.; Bouallègue, S.; Haggège, J.; Garrido, I.; Garrido, A.J. Firefly algorithm based-pitch angle control of a tidal stream generator for power limitation mode. In Proceedings of the 2018 International Conference on Advanced Systems and Electric Technologies (IC ASET), Hammamet, Tunisia, 22–25 March 2018; pp. 387–392. [Google Scholar]
- Kirke, B.K.; Lazauskas, L. Limitations of fixed pitch Darrieus hydrokinetic turbines and the challenge of variable pitch. Renew. Energy 2011, 36, 893–897. [Google Scholar] [CrossRef]
- Whitby, B.; Ugalde-Loo, C.E. Performance of pitch and stall regulated tidal stream turbines. IEEE Trans. Sustain. Energy 2014, 5, 64–72. [Google Scholar] [CrossRef]
- Zhou, Z.; Scuiller, F.; Charpentier, J.F.; Benbouzid, M.; Tang, T. Power limitation control for a PMSG-based marine current turbine at high tidal speed and strong sea state. In Proceedings of the 2013 IEEE International Electric Machines & Drives Conference (IEMDC), Chicago, IL, USA, 12–15 May 2013. [Google Scholar]
- Kalogirou, S.A. Artificial neural networks in renewable energy systems applications: A review. Renew. Sustain. Energy Rev. 2001, 5, 373–401. [Google Scholar] [CrossRef]
- Manas, M.; Kumari, A.; Das, S. An Artificial Neural Network based Maximum Power Point Tracking method for photovoltaic system. In Proceedings of the 2016 International Conference on Recent Advances and Innovations in Engineering (ICRAIE), Jaipur, India, 23–25 December 2016; pp. 1–6. [Google Scholar]
- Ouammi, A.; Zejli, D.; Dagdougui, H.; Benchrifa, R. Artificial neural network analysis of Moroccan solar potential. Renew. Sustain. Energy Rev. 2012, 16, 4876–4889. [Google Scholar] [CrossRef]
- Ghefiri, K.; Bouallègue, S.; Garrido, I.; Garrido, A.J.; Haggège, J. Multi-Layer Artificial Neural Networks Based MPPT-Pitch Angle Control of a Tidal Stream Generator. Sensors 2018, 18, 1317. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.S.; Fu, W. Area load frequency control using fuzzy gain scheduling of PI controllers. Electr. Power Syst. Res. 1997, 42, 145–152. [Google Scholar] [CrossRef]
- Thièbot, J.; du Bois, P.B.; Guillou, S. Numerical modeling of the effect of tidal stream turbines on the hydrodynamics and the sediment transport-Application to the Alderney Race (Raz Blanchard), France. Renew. Energy 2015, 75, 356–365. [Google Scholar] [CrossRef]
- SHOM. The Portal of Maritime and Coastal Geographic Information. Available online: http://www.shom.fr (accessed on 11 September 2018).
- Lewis, M.J.; Neill, S.P.; Hashemi, M.R.; Reza, M. Realistic wave conditions and their influence on quantifying the tidal stream energy resource. Appl. Energy 2014, 136, 495–508. [Google Scholar] [CrossRef]
- Ghefiri, K.; Garrido, I.; Bouallègue, S.; Haggège, J.; Garrido, A. Hybrid Neural Fuzzy Design-Based Rotational Speed Control of a Tidal Stream Generator Plant. Sustainability 2018, 10, 3746. [Google Scholar] [CrossRef]
- Ghefiri, K.; Bouallègue, S.; Garrido, I.; Garrido, A.J.; Haggège, J. Complementary Power Control for Doubly Fed Induction Generator-Based Tidal Stream Turbine Generation Plants. Energies 2017, 10, 862. [Google Scholar] [CrossRef]
- Ghefiri, K.; Bouallègue, S.; Haggège, J. Modeling and SIL simulation of a Tidal Stream device for marine energy conversion. In Proceedings of the 2015 6th International Renewable Energy Congress (IREC), Sousse, Tunisia, 24–26 March 2015; pp. 1–6. [Google Scholar]
- Elghali, S.E.B.; Balme, R.; Le Saux, K.; Benbouzid, M.E.H.; Charpentier, J.F.; Hauville, F. A simulation model for the evaluation of the electrical power potential harnessed by a marine current turbine. IEEE J. Ocean. Eng. 2007, 32, 786–797. [Google Scholar] [CrossRef]
- Fernandez, L.M.; Jurado, F.; Saenz, J.R. Aggregated dynamic model for wind farms with doubly fed induction generator wind turbines. Renew. Energy 2008, 33, 129–140. [Google Scholar] [CrossRef]
- Amundarain, M.; Alberdi, M.; Garrido, A.J.; Garrido, I. Modeling and simulation of wave energy generation plants: Output power control. IEEE Trans. Ind. Electron. 2011, 58, 105–117. [Google Scholar] [CrossRef]
- Alberdi, M.; Amundarain, M.; Garrido, A.J.; Garrido, I.; Maseda, F.J. Fault-ride-through capability of oscillating-water-column-based wave-power-generation plants equipped with doubly fed induction generator and airflow control. IEEE Trans. Ind. Electron. 2011, 58, 1501–1517. [Google Scholar] [CrossRef]
- Baroudi, J.A.; Dinavahi, V.; Knight, A.M. A review of power converter topologies for wind generators. Renew. Energy 2007, 32, 2369–2385. [Google Scholar] [CrossRef]
- Hu, J.; Nian, H.; Xu, H.; He, Y. Dynamic modeling and improved control of DFIG under distorted grid voltage conditions. IEEE Trans. Energy Convers. 2011, 26, 163–175. [Google Scholar] [CrossRef]
- Zhao, Z.Y.; Tomizuka, M.; Isaka, S. Fuzzy gain scheduling of PID controllers. IEEE Trans. Syst. Man Cybern. 1993, 23, 1392–1398. [Google Scholar] [CrossRef]
- Bouallègue, S.; Haggège, J.; Ayadi, M.; Benrejeb, M. PID-type fuzzy logic controller tuning based on particle swarm optimization. Eng. Appl. Artif. Intell. 2012, 25, 484–493. [Google Scholar] [CrossRef]
- Tursini, M.; Parasiliti, F.; Zhang, D. Real-time gain tuning of PI controllers for high-performance PMSM drives. IEEE Trans. Ind. Appl. 2002, 38, 1018–1026. [Google Scholar] [CrossRef]
- Bedoud, K.; Ali-rachedi, M.; Bahi, T.; Lakel, R. Adaptive fuzzy gain scheduling of PI controller for control of the wind energy conversion systems. Energy Procedia 2015, 74, 211–225. [Google Scholar] [CrossRef]
- Dounis, A.I.; Kofinas, P.; Alafodimos, C.; Tseles, D. Adaptive fuzzy gain scheduling PID controller for maximum power point tracking of photovoltaic system. Renew. Energy 2013, 60, 202–214. [Google Scholar] [CrossRef]
- Ghefiri, K.; Bouallègue, S.; Haggège, J.; Garrido, I.; Garrido, A.J. Modeling and MPPT control of a Tidal Stream Generator. In Proceedings of the 2017 4th International Conference on Control, Decision and Information Technologies (CoDIT), Barcelona, Spain, 5–7 April 2017; pp. 1003–1008. [Google Scholar]
- Pena, R.; Clare, J.C.; Asher, G.M. Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed wind-energy generation. IEE Proc. 1996, 143, 231–241. [Google Scholar] [CrossRef]
- Twining, E.; Holmes, D.G. Grid current regulation of a three-phase voltage source inverter with an LCL input filter. IEEE Trans. Power Electron. 2003, 18, 888–895. [Google Scholar] [CrossRef]
- Astrom, K.J.; Hagglund, T. Advanced PID Control; ISA—The Instrumentation, Systems, and Automation Society, Research Triangle: Park, NC, USA, 2006. [Google Scholar]
- Vilanova, R.; Visioli, A. PID Control in the Third Millennium; Springer: London, UK, 2012. [Google Scholar]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of control and grid synchronization for distributed power generation systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NB | N | Z | P | PB | |
|---|---|---|---|---|---|
| NB | NB | NB | NB | N | Z |
| N | NB | N | N | N | Z |
| Z | NB | N | Z | P | PB |
| P | Z | P | P | P | PB |
| PB | Z | P | PB | PB | PB |
| NB | N | Z | P | PB | |
|---|---|---|---|---|---|
| NB | PB | PB | PB | N | NB |
| N | PB | P | P | Z | NB |
| Z | P | P | Z | N | NB |
| P | Z | P | N | N | NB |
| PB | Z | N | NB | NB | NB |
| NB | N | Z | P | PB | |
|---|---|---|---|---|---|
| NB | NB | NB | NB | P | PB |
| N | N | N | N | Z | PB |
| Z | Z | N | Z | P | PB |
| P | Z | N | P | P | PB |
| PB | Z | P | PB | PB | PB |
| Turbine | Drive-Train | DFIG | Converter |
|---|---|---|---|
| = 1027 kg/m | = 3 s | = 1.5 MW | = 1150 V |
| R = 8 m | = 0.5 s | = 690 V | C = 0.01 F |
| = 0.44 | = 2 × 10 Nm/rad | = 50 Hz | |
| = 6.96 | = 3.5 × 10 Nms/rad | = 2.63 m | |
| = 3.2 m/s | = 2.63 m | Choke | |
| = 0.168 mH | = 0.595 m | ||
| = 0.133 mH | = 0.157 mH | ||
| = 5.474 mH | |||
| p = 2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghefiri, K.; Garrido, A.J.; Rusu, E.; Bouallègue, S.; Haggège, J.; Garrido, I. Fuzzy Supervision Based-Pitch Angle Control of a Tidal Stream Generator for a Disturbed Tidal Input. Energies 2018, 11, 2989. https://doi.org/10.3390/en11112989
Ghefiri K, Garrido AJ, Rusu E, Bouallègue S, Haggège J, Garrido I. Fuzzy Supervision Based-Pitch Angle Control of a Tidal Stream Generator for a Disturbed Tidal Input. Energies. 2018; 11(11):2989. https://doi.org/10.3390/en11112989
Chicago/Turabian StyleGhefiri, Khaoula, Aitor J. Garrido, Eugen Rusu, Soufiene Bouallègue, Joseph Haggège, and Izaskun Garrido. 2018. "Fuzzy Supervision Based-Pitch Angle Control of a Tidal Stream Generator for a Disturbed Tidal Input" Energies 11, no. 11: 2989. https://doi.org/10.3390/en11112989
APA StyleGhefiri, K., Garrido, A. J., Rusu, E., Bouallègue, S., Haggège, J., & Garrido, I. (2018). Fuzzy Supervision Based-Pitch Angle Control of a Tidal Stream Generator for a Disturbed Tidal Input. Energies, 11(11), 2989. https://doi.org/10.3390/en11112989