Overview of AC Microgrid Controls with Inverter-Interfaced Generations





Abstract
1. Introduction
2. Overview of DG Units
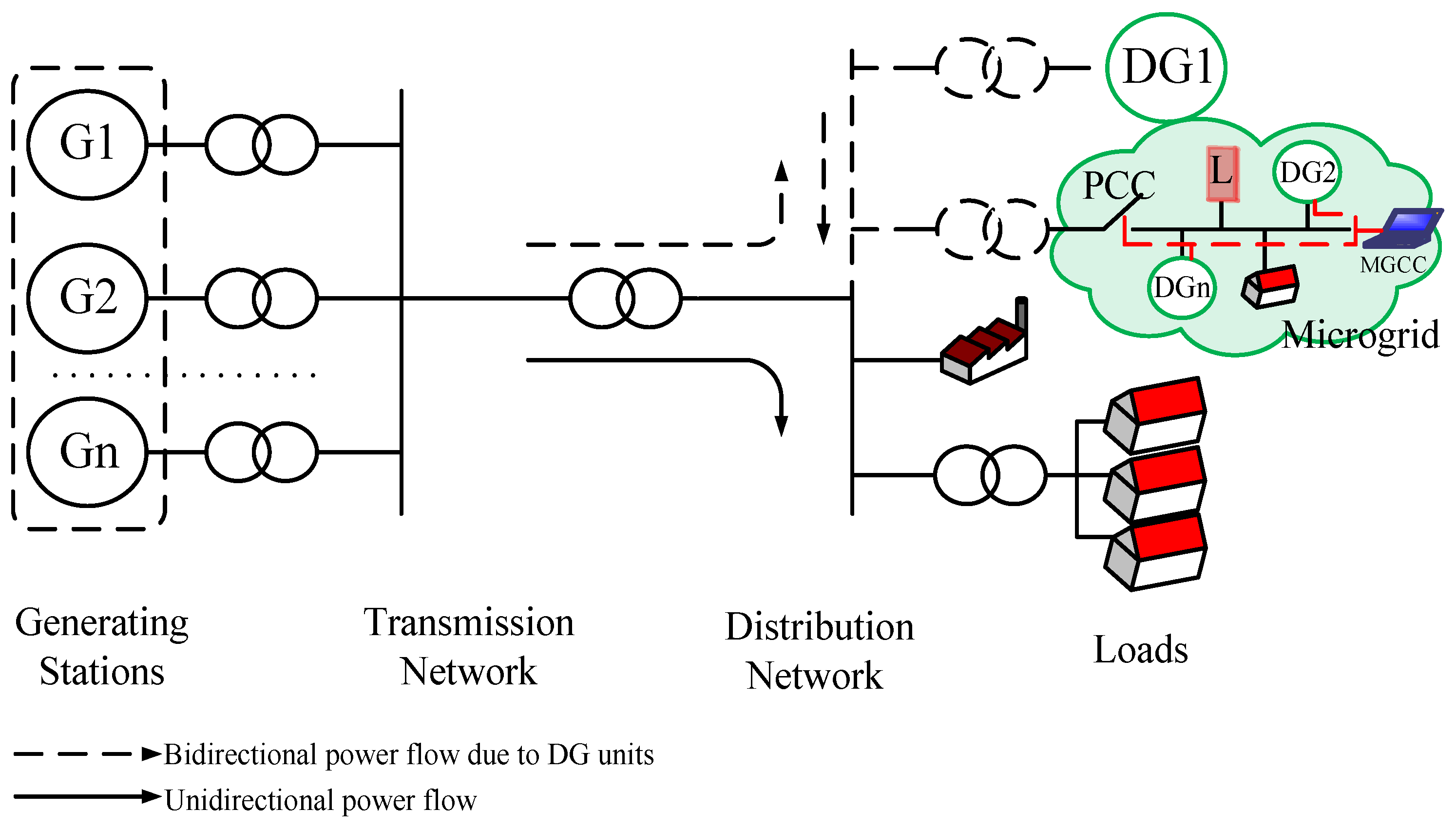
3. Microgrid Characteristics and Operation
3.1. Characteristics of Microgrids
- It supervises the electrical components, such as powers, voltages and frequencies by means of monitors.
- It has a PCC in a distribution network for connecting and disconnecting the grid utility.
- It is a subset of LV or medium-voltage (MV) distribution networks.
- It consists of generation units, a hierarchical control approach, power consumption places and energy storage systems.
- It facilitates an uninterrupted power supply to, at least, the highest priority loads during a grid failure or power quality degradation.
- It has two operating modes: (1) grid-connected; and (2) islanded or standalone (autonomous).
- It acts as a single controllable entity from the grid perspective.
- It generates the required reference voltage and frequency in an islanded operation.
- It is constructed in a defined location which can be in a distribution network or remote area.
- It has the necessary protection schemes.
- It controls the power supply during both grid-connected and islanding operations.
- It accumulates DG units, the ratings of which are less than 100 MW.
- It displays ‘plug and play’ features and ‘peer to peer’ functionality.
- It adjusts to abnormal situations (unintentional islanding or faults).
- It uses local information to control the power flow of DG units.
- It can possess ac and/or dc distribution networks.
- It may provide electrical energy and thermal energy (heat and/or cool) simultaneously.
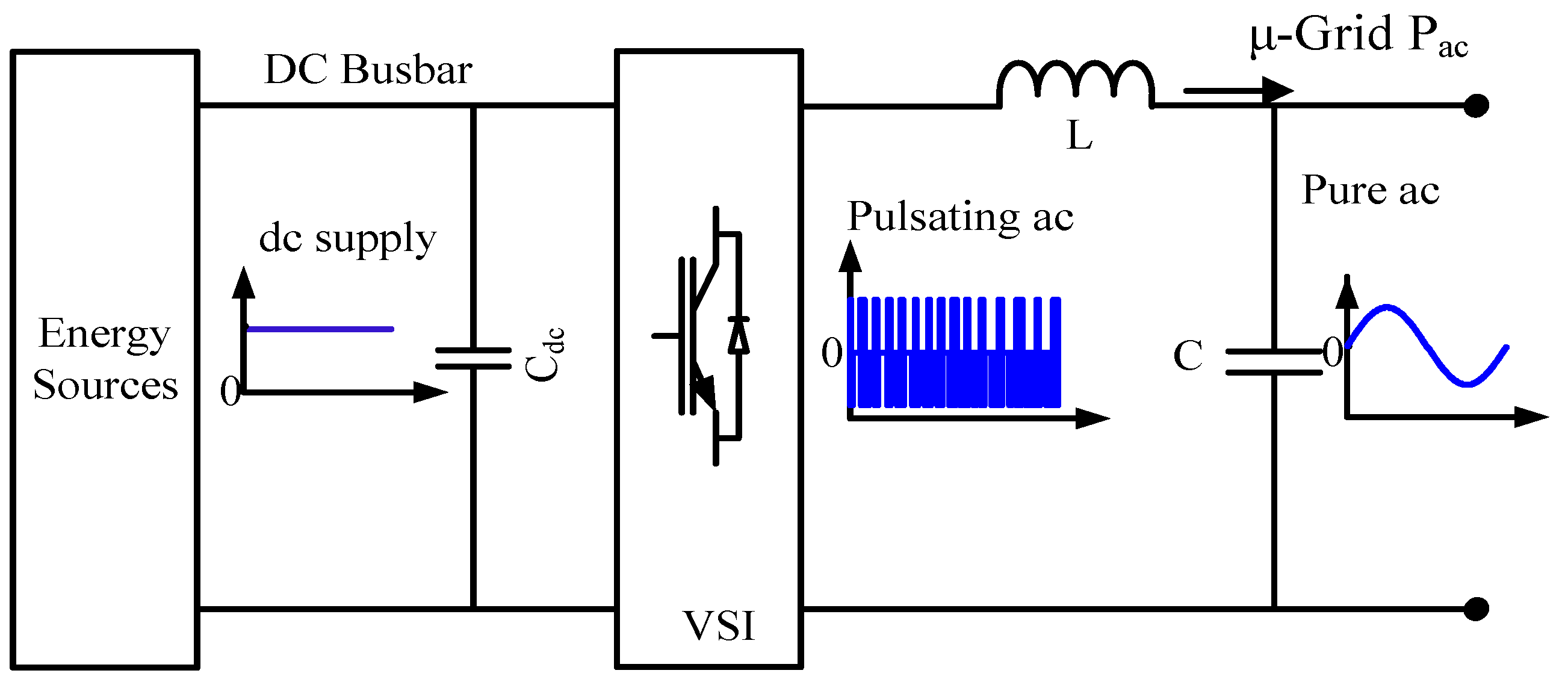
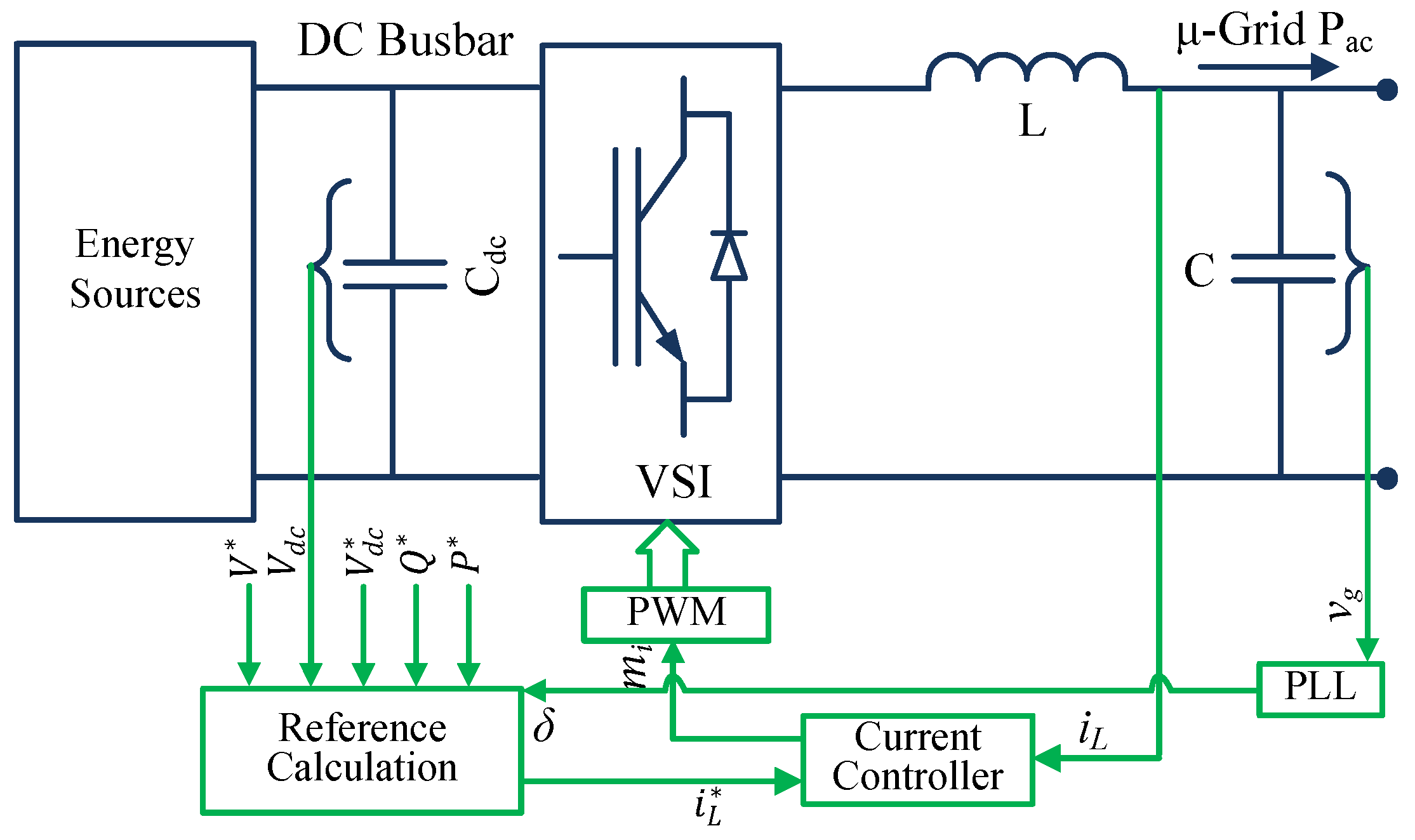
3.2. Grid-Connected Operation
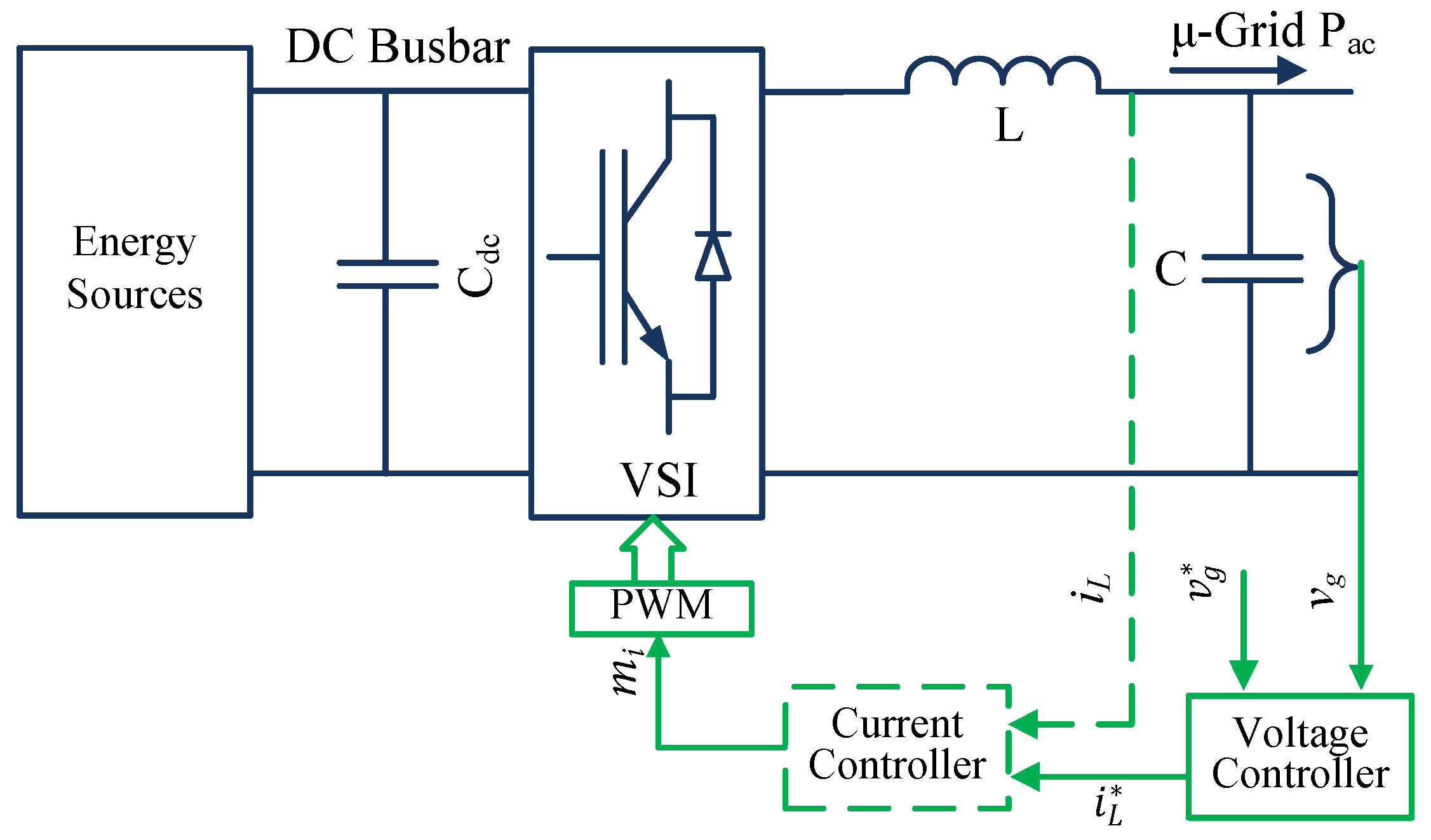
3.3. Islanded Operation
- The absence of a current control can lead to a large transient current that may damage semiconductor components during faults.
- The voltage measurement across the capacitor may not provide accurate information regarding the network.
3.4. Miscellaneous DG Operation
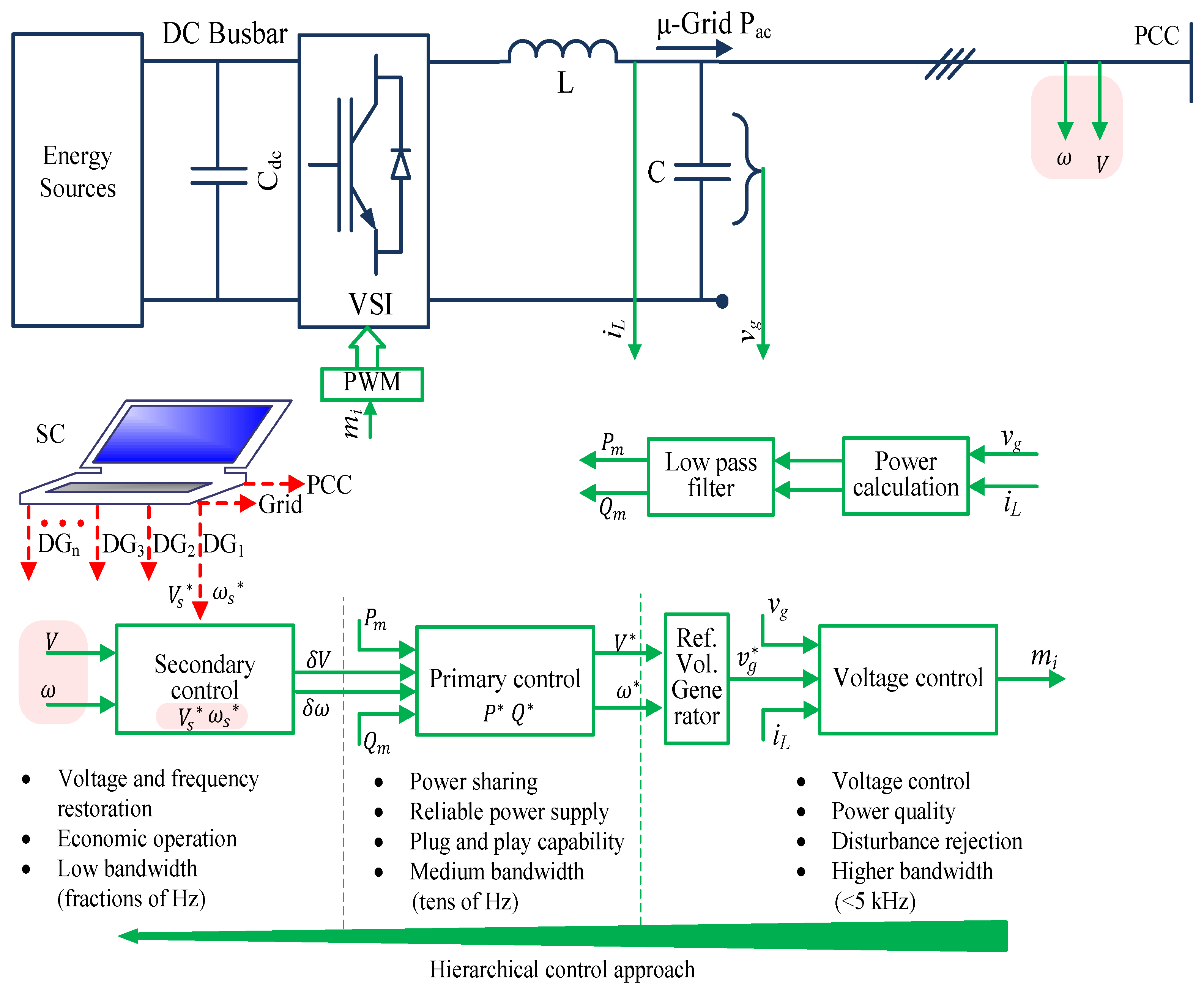
4. Hierarchical Control of DG Units
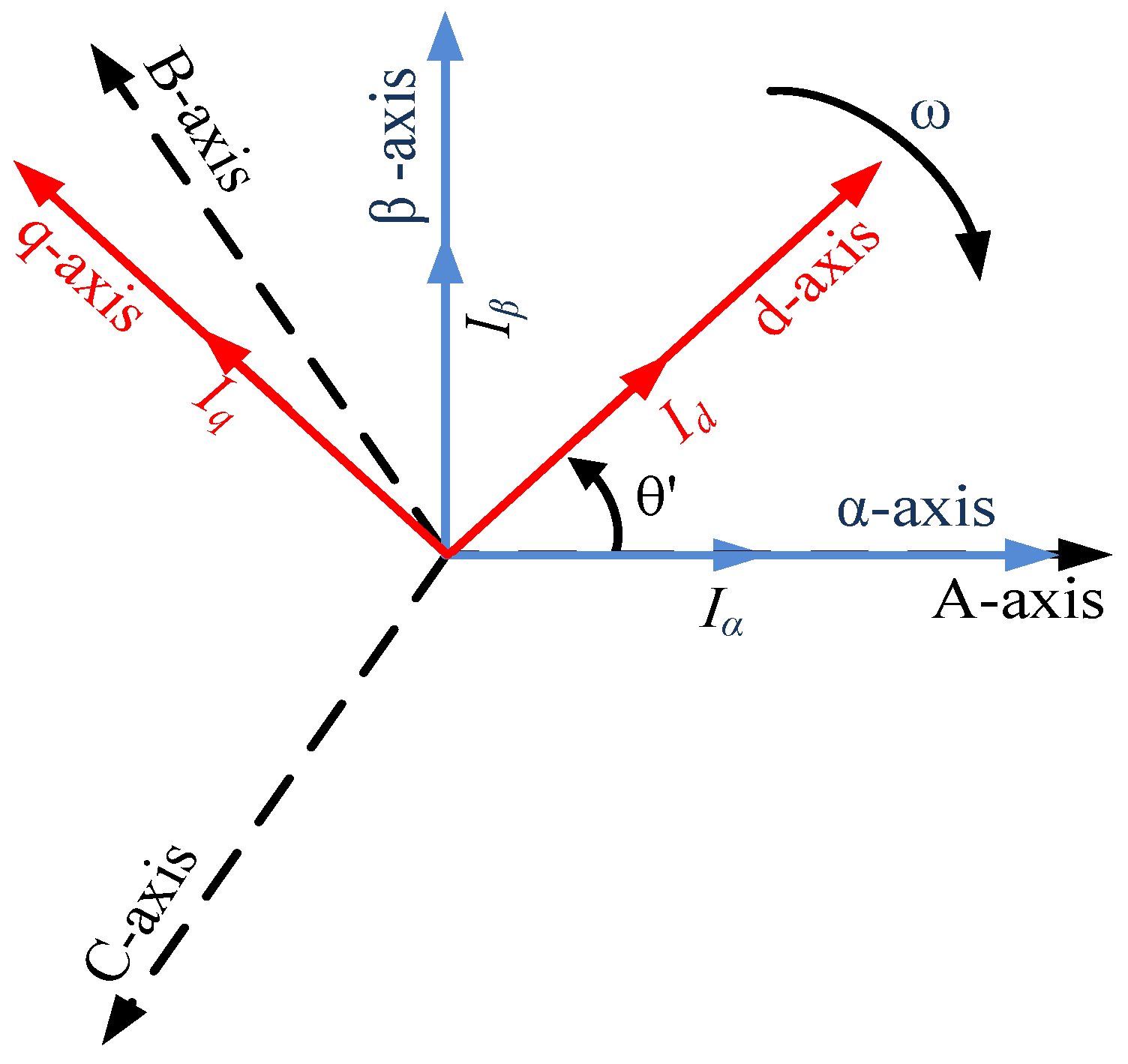
5. Control Strategies in Different Reference Frames
5.1. Synchronous Rotating Reference Frame
5.2. Stationary Reference Frame
5.3. Natural Transformation Frame
6. Control Methods for Inner-Loop Control
6.1. Proportional-Integral Controller
6.2. Proportional-Resonant Controller
6.3. Deadbeat Controller
6.4. Model Predictive Control
6.5. Hysteresis Controller
6.6. H-Infinity Controller
6.7. Repetitive Controller
6.8. Neural Network
6.9. Fuzzy Controller
6.10. Sliding Mode Control
6.11. Linear Quadratic Regulator
6.12. Linear Quadratic Integrator
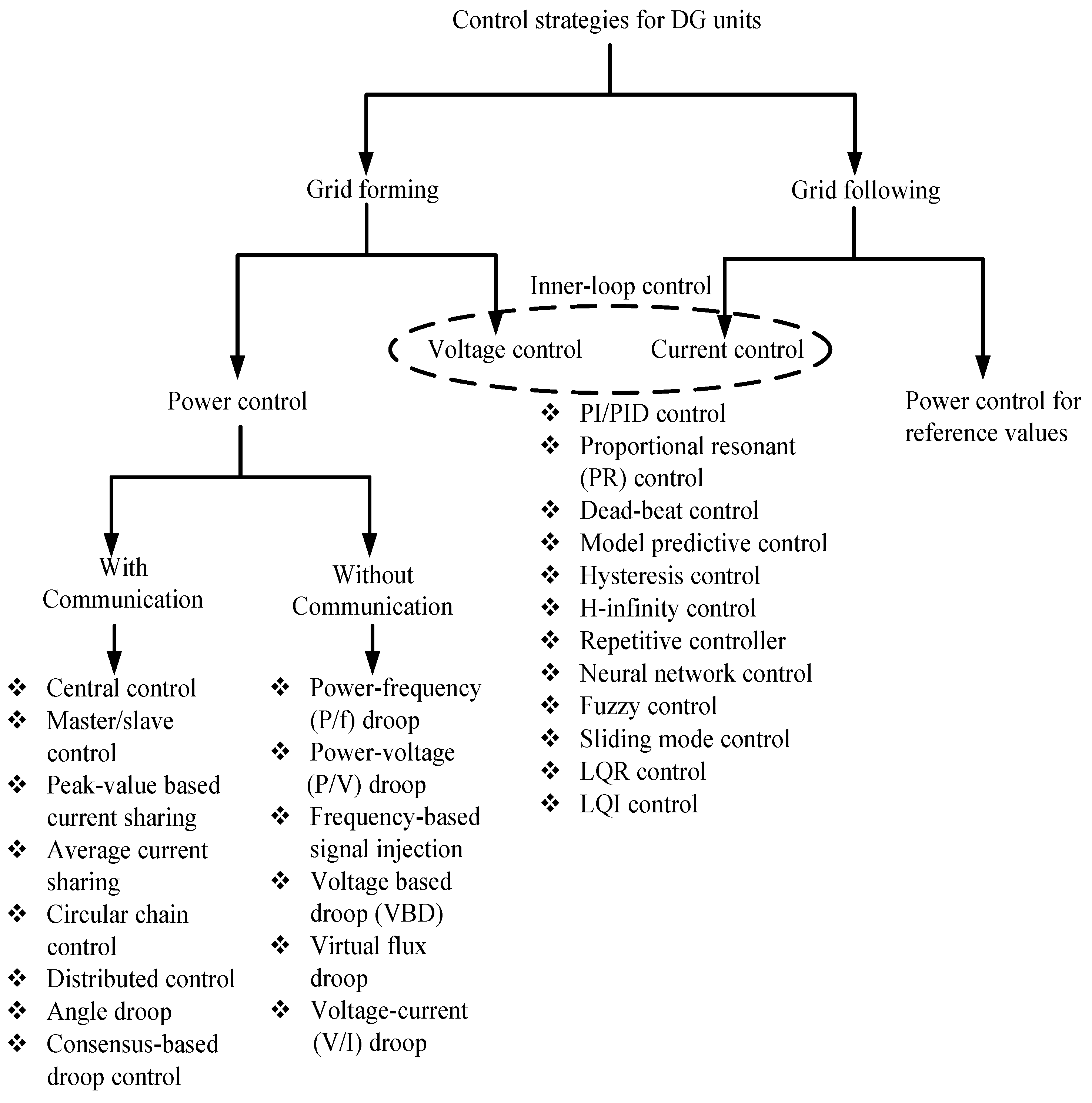
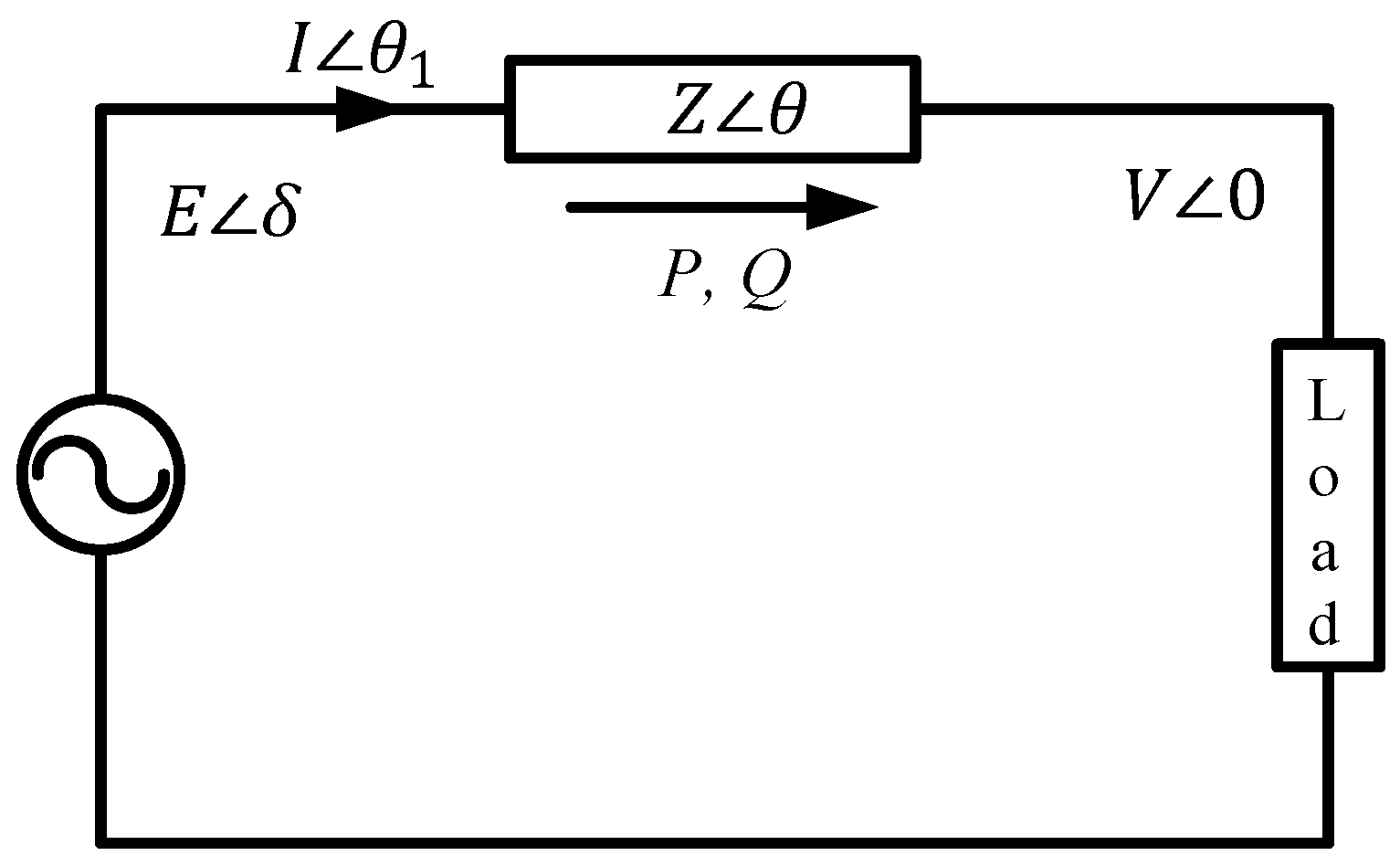
7. Control Methods for Power Sharing
7.1. Communication-Based Control
7.2. Communication-Less Control
7.2.1. Power/Frequency Droop Control
7.2.2. Power/Voltage Droop Control
7.2.3. Signal-Injection Based Method
7.2.4. Voltage-Based Droop Control
7.2.5. Virtual Flux Droop Control
7.2.6. V/I Droop Characteristic Method
7.2.7. Other Control Methods
8. Future Work
9. Conclusions
Author Contributions
Conflicts of Interest
Abbreviations
| DGs | Distributed generations |
| RESs | Renewable energy sources |
| PECs | Power electronic converters |
| MOSFETs | Metal-oxide-semiconductor field-effect transistors |
| PWM | Pulse width modulation |
| CSIs | Current source inverters |
| VSIs | Voltage source inverters |
| PCC | Point of common coupling |
| SC | Supervisory controller |
| MGCC | Microgrid central control |
| PLL | Phase-locked loop |
| PR | Proportional-resonant |
| DB | Deadbeat |
| THD | Total harmonic distortion |
| SMC | Sliding mode control |
| LQR | Linear quadratic regulator |
| LQI | Linear quadratic integrator |
| VBD | Voltage-based droop |
| RC | Repetitive controller |
| NN | Neural network |
| Modulation index of PWM | |
| G | Generator |
| Z | Line impedance |
| E | Supply voltage |
| V | Terminal voltage |
| S | Apparent power |
| P | Active power |
| Q | Reactive power |
| L | Filter inductor |
| C | Filter capacitor |
| DC-link capacitor | |
| Instantaneous grid voltage | |
| Reference instantaneous voltage for control | |
| Instantaneous line current | |
| Reference instantaneous current for control | |
| Reference grid voltage | |
| Reference angular frequency | |
| Measured active power | |
| Measured reactive power | |
| Reference active power | |
| Reference reactive power | |
| Direct axis current component | |
| Quadratic axis current component | |
| Reference direct current component | |
| Reference quadratic current component | |
| Alpha axis current component | |
| Beta axis current component | |
| Reference angular frequency set by supervisory controller | |
| Reference voltage set by supervisory controller | |
| Small real power in the injected signal |
References
- Jin, M.; Feng, W.; Liu, P.; Marnay, C.; Spanos, C. MOD-DR: Microgrid optimal dispatch with demand response. Appl. Energy 2017, 187, 758–776. [Google Scholar] [CrossRef]
- Hossain, M.A.; Ahmed, M.R. Present energy scenario and potentiality of wind energy in Bangladesh. World Acad. Sci. Eng. Technol. 2013, 7, 1001–1005. [Google Scholar]
- Jin, M.; Feng, W.; Marnay, C.; Spanos, C. Microgrid to enable optimal distributed energy retail and end-user demand response. Appl. Energy 2017. [Google Scholar] [CrossRef]
- Hossain, M.A.; Azim, M.I.; Mahmud, M.A.; Pota, H.R. Primary Voltage Control of a Single-phase Inverter using Linear Quadratic Regulator with Integrator. In Proceedings of the 2015 Australasian Universities Power Engineering Conference (AUPEC), Wollongong, Australia, 27–30 September 2015. [Google Scholar]
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J.M. Review of power sharing control strategies for islanding operation of AC microgrids. IEEE Trans. Smart Grid 2016, 7, 200–215. [Google Scholar] [CrossRef]
- Vandoorn, T.; De Kooning, J.; Meersman, B.; Vandevelde, L. Review of primary control strategies for islanded microgrids with power-electronic interfaces. Renew. Sustain. Energy Rev. 2013, 19, 613–628. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A. Hierarchical structure of microgrids control system. IEEE Trans. Smart Grid 2012, 3, 1963–1976. [Google Scholar] [CrossRef]
- Hossain, M.A.; Azim, M.I.; Mahmud, M.A.; Pota, H.R. Active power control in an islanded microgrid using DC link voltage status. In Proceedings of the 2015 IEEE Innovative Smart Grid Technologies-Asia (ISGT ASIA), Bangkok, Thailand, 3–6 November 2015; pp. 1–6. [Google Scholar]
- Chung, H.S.H.; Wang, H.; Blaabjerg, F.; Pecht, M. Reliability of Power Electronic Converter Systems; The Institution of Engineering and Technology: London, UK, 2016. [Google Scholar]
- Mohan, N.; Undeland, T.M. Power Electronics: Converters, Applications, and Design; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics; Springer Science & Business Media: New York, NY, USA, 2007. [Google Scholar]
- Katiraei, F.; Iravani, R.; Hatziargyriou, N.; Dimeas, A. Microgrids management. IEEE Power Energy Mag. 2008, 6, 54–65. [Google Scholar] [CrossRef]
- Lopes, J.; Moreira, C.; Madureira, A. Defining control strategies for microgrids islanded operation. IEEE Trans. Power Syst. 2006, 21, 916–924. [Google Scholar] [CrossRef]
- Lasseter, R.H. Microgrids. In Proceedings of the 2002 Power Engineering Society Winter Meeting, New York, NY, USA, 27–31 January 2002; IEEE: Piscataway, NJ, USA, 2002; Volume 1, pp. 305–308. [Google Scholar]
- Hossain, M.A.; Pota, H.R.; Haruni, A.M.O.; Hossain, M.J. DC-link voltage regulation of inverters to enhance microgrid stability during network contingencies. Electr. Power Syst. Res. 2017, 147, 233–244. [Google Scholar] [CrossRef]
- Bhaskara, S.N.; Chowdhury, B.H. Microgrids—A review of modeling, control, protection, simulation and future potential. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–7. [Google Scholar]
- Hatziargyriou, N.; Asano, H.; Iravani, R.; Marnay, C. Microgrids. IEEE Power Energy Mag. 2007, 5, 78–94. [Google Scholar] [CrossRef]
- Nejabatkhah, F.; Li, Y.W. Overview of power management strategies of hybrid AC/DC microgrid. IEEE Trans. Power Electron. 2015, 30, 7072–7089. [Google Scholar] [CrossRef]
- Green, T.; Prodanovi, M. Control of inverter-based micro-grids. Electr. Power Syst. Res. 2007, 77, 1204–1213. [Google Scholar] [CrossRef]
- Prodanovi, M.; Green, T. Power quality improvement in grid connection of three-phase inverters. In Proceedings of the International Conference on Power Electronics, Machines and Drives, 2002 (Conf. Publ. No. 487), Sante Fe, NM, USA, 4–7 June 2002; IET: London, UK, 2002; pp. 24–29. [Google Scholar]
- Abeyasekera, T.; Johnson, C.M.; Atkinson, D.J.; Armstrong, M. Suppression of line voltage related distortion in current controlled grid connected inverters. IEEE Trans. Power Electron. 2005, 20, 1393–1401. [Google Scholar] [CrossRef]
- Sofla, M.A.; Wang, L.; King, R. Modeling and Control of DC-AC Power Converters of Distributed Energy Resources in Microgrids. In Modeling and Control of Sustainable Power Systems; Springer: Berlin/Heidelberg, Germany, 2012; pp. 341–366. [Google Scholar]
- Issa, W.; Abusara, A.; Sharkh, S. Impedance interaction between islanded parallel voltage source inverters and the distribution network. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 8–10 April 2014. [Google Scholar]
- Hossain, M.A.; Pota, H.R. Voltage tracking of a single-phase inverter in an islanded microgrid. Int. J. Renew. Energy Res. 2015, 5, 806–814. [Google Scholar]
- Kim, J.; Lee, J.; Nam, K. Inverter-based local AC bus voltage control utilizing two DOF control. IEEE Trans. Power Electron. 2008, 23, 1288–1298. [Google Scholar]
- Vandoorn, T.L.; Meersman, B.; De Kooning, J.D.; Vandevelde, L. Analogy between conventional grid control and islanded microgrid control based on a global DC-link voltage droop. IEEE Trans. Power Deliv. 2012, 27, 1405–1414. [Google Scholar] [CrossRef]
- Piagi, P.; Lasseter, R.H. Industrial Application of MicroGrids; Power System Engineering Research Center, University of Wisconsin-Madison: Madison, WI, USA, 2001. [Google Scholar]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; Vicuna, D.; García, L.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar]
- Mehrizi-Sani, A.; Iravani, R. Potential-function based control of a microgrid in islanded and grid-connected modes. IEEE Trans. Power Syst. 2010, 25, 1883–1891. [Google Scholar] [CrossRef]
- Karimi, H.; Nikkhajoei, H.; Iravani, R. Control of an electronically-coupled distributed resource unit subsequent to an islanding event. IEEE Trans. Power Deliv. 2008, 23, 493–501. [Google Scholar] [CrossRef]
- Issa, W.R.; Abusara, M.A.; Sharkh, S.M. Control of transient power during unintentional islanding of microgrids. IEEE Trans. Power Electron. 2015, 30, 4573–4584. [Google Scholar] [CrossRef]
- Lu, X.; Guerrero, J.M.; Sun, K.; Vasquez, J.C.; Teodorescu, R.; Huang, L. Hierarchical control of parallel AC-DC converter interfaces for hybrid microgrids. IEEE Trans. Smart Grid 2014, 5, 683–692. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.L.; Loh, P.C. Advanced control architectures for intelligent microgrids, part I: Decentralized and hierarchical control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef]
- Savaghebi, M.; Jalilian, A.; Vasquez, J.C.; Guerrero, J.M. Secondary control for voltage quality enhancement in microgrids. IEEE Trans. Smart Grid 2012, 3, 1893–1902. [Google Scholar] [CrossRef]
- Ko, S.H.; Lee, S.R.; Dehbonei, H.; Nayar, C.V. Application of voltage-and current-controlled voltage source inverters for distributed generation systems. IEEE Trans. Energy Convers. 2006, 21, 782–792. [Google Scholar] [CrossRef]
- Li, Y.W. Control and resonance damping of voltage-source and current-source converters with filters. IEEE Trans. Ind. Electron. 2009, 56, 1511–1521. [Google Scholar]
- Irwin, J.; Kazmierkowski, M.P.; Krishnan, R.; Blaabjerg, F. Control in Power Electronics: Selected Problems; Academic Press: New York, NY, USA, 2002. [Google Scholar]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodrguez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Teodorescu, R.; Liserre, M.; Timbus, A.V. Overview of control and grid synchronization for distributed power generation systems. IEEE Trans. Ind. Electron. 2006, 53, 1398–1409. [Google Scholar] [CrossRef]
- Timbus, A.V.; Teodorescu, R.; Blaabjerg, F.; Liserre, M.; Rodriguez, P. Linear and nonlinear control of distributed power generation systems. In Proceedings of the Conference Record of the 2006 IEEE Industry Applications Conference 41st IAS Annual Meeting, Tampa, FL, USA, 8–12 October 2006; IEEE: Piscataway, NJ, USA, 2006; Volume 2, pp. 1015–1023. [Google Scholar]
- Vandoorn, T.; Renders, B.; De Belie, F.; Meersman, B.; Vandevelde, L. A voltage-source inverter for microgrid applications with an inner current control loop and an outer voltage control loop. In Proceedings of the International Conference on Renewable Energies and Power Quality (ICREPQ ’09), Valencia, Spain, 15–17 April 2009. [Google Scholar]
- Abusara, M.A.; Sharkh, S.M.; Guerrero, J.M. Improved droop control strategy for grid-connected inverters. Sustain. Energy Grids Netw. 2015, 1, 10–19. [Google Scholar] [CrossRef]
- Weiss, G.; Zhong, Q.C.; Green, T.C.; Liang, J. H-infinity repetitive control of DC-AC converters in microgrids. IEEE Trans. Power Electron. 2004, 19, 219–230. [Google Scholar] [CrossRef]
- Teodorescu, R.; Blaabjerg, F.; Liserre, M.; Loh, P.C. Proportional-resonant controllers and filters for grid-connected voltage-source converters. IEE Proc. Electr. Power Appl. 2006, 153, 750–762. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, M.; Song, Z.F.; Xia, C.L. Proportional-resonant control of doubly-fed induction generator wind turbines for low-voltage ride-through enhancement. Energies 2012, 5, 4758–4778. [Google Scholar] [CrossRef]
- Vidal, A.; Freijedo, F.D.; Yepes, A.; Fernandez-Comesana, P.; Malvar, J.; Lopez, O.; Doval-Gandoy, J. Assessment and optimization of the transient response of proportional-resonant current controllers for distributed power generation systems. IEEE Trans. Ind. Electron. 2013, 60, 1367–1383. [Google Scholar] [CrossRef]
- Xueguang, Z.; Wenjie, Z.; Jiaming, C.; Dianguo, X. Deadbeat control strategy of circulating currents in parallel connection system of three-phase PWM converter. IEEE Trans. Energy Convers. 2014, 29, 406–417. [Google Scholar]
- Kim, J.; Hong, J.; Kim, H. Improved Direct Deadbeat Voltage Control with an Actively Damped Inductor-Capacitor Plant Model in an Islanded AC Microgrid. Energies 2016, 9, 978. [Google Scholar] [CrossRef]
- Song, W.; Ma, J.; Zhou, L.; Feng, X. Deadbeat Predictive Power Control of Single-Phase Three-Level Neutral-Point-Clamped Converters Using Space-Vector Modulation for Electric Railway Traction. IEEE Trans. Power Electron. 2016, 31, 721–732. [Google Scholar] [CrossRef]
- Timbus, A.; Liserre, M.; Teodorescu, R.; Rodriguez, P.; Blaabjerg, F. Evaluation of current controllers for distributed power generation systems. IEEE Trans. Power Electron. 2009, 24, 654–664. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, J.; Dorrell, D.G. Model predictive control of grid-connected inverters for PV systems with flexible power regulation and switching frequency reduction. IEEE Trans. Ind. Appl. 2015, 51, 587–594. [Google Scholar] [CrossRef]
- Cortés, P.; Kazmierkowski, M.P.; Kennel, R.M.; Quevedo, D.E.; Rodríguez, J. Predictive control in power electronics and drives. IEEE Trans. Ind. Electron. 2008, 55, 4312–4324. [Google Scholar] [CrossRef]
- Rahim, N.A.; Selvaraj, J.; Krismadinata. Implementation of hysteresis current control for single-phase grid connected inverter. In Proceedings of the 2007 7th International Conference on Power Electronics and Drive Systems, Bangkok, Thailand, 27–30 November 2007. [Google Scholar]
- Prabhakar, N.; Mishra, M.K. Dynamic hysteresis current control to minimize switching for three-phase four-leg VSI topology to compensate nonlinear load. IEEE Trans. Power Electron. 2010, 25, 1935–1942. [Google Scholar] [CrossRef]
- Hornik, T.; Zhong, Q.C. Parallel PI voltage-H∞ current controller for the neutral point of a three-phase inverter. IEEE Trans. Ind. Electron. 2013, 60, 1335–1343. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Hornik, T. Cascaded current–voltage control to improve the power quality for a grid-connected inverter with a local load. IEEE Trans. Ind. Electron. 2013, 60, 1344–1355. [Google Scholar] [CrossRef]
- Hara, S.; Yamamoto, Y.; Omata, T.; Nakano, M. Repetitive control system: A new type servo system for periodic exogenous signals. IEEE Trans. Autom. Control 1988, 33, 659–668. [Google Scholar] [CrossRef]
- Jin, W.; Li, Y.; Sun, G.; Bu, L. H-infinity Repetitive Control Based on Active Damping with Reduced Computation Delay for LCL-Type Grid-Connected Inverters. Energies 2017, 10, 586. [Google Scholar] [CrossRef]
- Liu, T.; Wang, D. Parallel Structure Fractional Repetitive Control for PWM Inverters. IEEE Trans. Ind. Electron. 2015, 62, 5045–5054. [Google Scholar] [CrossRef]
- Hatti, M.; Tioursi, M. Dynamic neural network controller model of PEM fuel cell system. Int. J. Hydrogen Energy 2009, 34, 5015–5021. [Google Scholar]
- Mohamed, Y.A.R.I.; El-Saadany, E.F. Adaptive decentralized droop controller to preserve power sharing stability of paralleled inverters in distributed generation microgrids. IEEE Trans. Power Electron. 2008, 23, 2806–2816. [Google Scholar] [CrossRef]
- Suganthi, L.; Iniyan, S.; Samuel, A.A. Applications of fuzzy logic in renewable energy systems—A review. Renew. Sustain. Energy Rev. 2015, 48, 585–607. [Google Scholar] [CrossRef]
- Musa, S.; Radzi, M.A.M.; Hizam, H.; Wahab, N.I.A.; Hoon, Y.; Zainuri, M.A.A.M. Modified Synchronous Reference Frame Based Shunt Active Power Filter with Fuzzy Logic Control Pulse Width Modulation Inverter. Energies 2017, 10, 758. [Google Scholar] [CrossRef]
- Hasanien, H.M.; Matar, M. A fuzzy logic controller for autonomous operation of a voltage source converter-based distributed generation system. IEEE Trans. Smart Grid 2015, 6, 158–165. [Google Scholar] [CrossRef]
- Sefa, I.; Altin, N.; Ozdemir, S.; Kaplan, O. Fuzzy PI controlled inverter for grid interactive renewable energy systems. IET Renew. Power Gener. 2015, 9, 729–738. [Google Scholar] [CrossRef]
- Chen, Z.; Luo, A.; Wang, H.; Chen, Y.; Li, M.; Huang, Y. Adaptive sliding-mode voltage control for inverter operating in islanded mode in microgrid. Int. J. Electr. Power Energy Syst. 2015, 66, 133–143. [Google Scholar] [CrossRef]
- Hao, X.; Yang, X.; Xie, R.; Huang, L.; Liu, T.; Li, Y. A fixed switching frequency integral resonant sliding mode controller for three-phase grid-connected photovoltaic inverter with LCL-filter. In Proceedings of the 2013 IEEE ECCE Asia Downunder (ECCE Asia), Melbourne, Australia, 3–6 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 793–798. [Google Scholar]
- Esmaeli, A. Stability analysis and control of microgrids by sliding mode control. Int. J. Electr. Power Energy Syst. 2016, 78, 22–28. [Google Scholar]
- Ahmed, K.; Massoud, A.; Finney, S.; Williams, B. Optimum selection of state feedback variables PWM inverters control. In Proceedings of the 4th IET Conference on Power Electronics, Machines and Drives, York, UK, 2–4 April 2008. [Google Scholar]
- Lalili, D.; Mellit, A.; Lourci, N.; Medjahed, B.; Boubakir, C. State feedback control of a three level grid-connected photovoltaic inverter. In Proceedings of the 2012 9th International Multi-Conference on Systems, Signals and Devices (SSD), Chemnitz, Germany, 20–23 March 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–6. [Google Scholar]
- Xue, M.; Zhang, Y.; Kang, Y.; Yi, Y.; Li, S.; Liu, F. Full feedforward of grid voltage for discrete state feedback controlled grid-connected inverter with LCL filter. IEEE Trans. Power Electron. 2012, 27, 4234–4247. [Google Scholar] [CrossRef]
- Jaen, C.; Pou, J.; Pindado, R.; Sala, V.; Zaragoza, J. A linear-quadratic regulator with integral action applied to PWM dc-dc converters. In Proceedings of the IECON 2006—32nd Annual Conference on Industrial Electronics, Paris, France, 6–10 November 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 2280–2285. [Google Scholar]
- Siri, K.; Lee, C.; Wu, T.F. Current distribution control for parallel connected converters. I. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 829–840. [Google Scholar] [CrossRef]
- Chen, J.F.; Chu, C.L. Combination voltage-controlled and current-controlled PWM inverters for UPS parallel operation. IEEE Trans. Power Electron. 1995, 10, 547–558. [Google Scholar] [CrossRef]
- Pei, Y.; Jiang, G.; Yang, X.; Wang, Z. Auto-master-slave control technique of parallel inverters in distributed AC power systems and UPS. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference, Aachen, Germany, 20–25 June 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 3, pp. 2050–2053. [Google Scholar]
- Roslan, A.M.; Ahmed, K.H.; Finney, S.J.; Williams, B.W. Improved instantaneous average current-sharing control scheme for parallel-connected inverter considering line impedance impact in microgrid networks. IEEE Trans. Power Electron. 2011, 26, 702–716. [Google Scholar] [CrossRef]
- Sun, X.; Lee, Y.S.; Xu, D. Modeling, analysis, and implementation of parallel multi-inverter systems with instantaneous average-current-sharing scheme. IEEE Trans. Power Electron. 2003, 18, 844–856. [Google Scholar]
- Chen, C.L.; Wang, Y.; Lai, J.S.; Lee, Y.S.; Martin, D. Design of parallel inverters for smooth mode transfer microgrid applications. IEEE Trans. Power Electron. 2010, 25, 6–15. [Google Scholar] [CrossRef]
- Chen, Q.; Ju, P.; Shi, K.; Tang, Y.; Shao, Z.; Yang, W. Parameter estimation and comparison of the load models with considering distribution network directly or indirectly. Int. J. Electr. Power Energy Syst. 2010, 32, 965–968. [Google Scholar] [CrossRef]
- Wu, T.F.; Chen, Y.K.; Huang, Y.H. 3C strategy for inverters in parallel operation achieving an equal current distribution. IEEE Trans. Ind. Electron. 2000, 47, 273–281. [Google Scholar]
- Prodanović, M.; Green, T.C. High-quality power generation through distributed control of a power park microgrid. IEEE Trans. Ind. Electron. 2006, 53, 1471–1482. [Google Scholar] [CrossRef]
- Majumder, R.; Chaudhuri, B.; Ghosh, A.; Majumder, R.; Ledwich, G.; Zare, F. Improvement of stability and load sharing in an autonomous microgrid using supplementary droop control loop. IEEE Trans. Power Syst. 2010, 25, 796–808. [Google Scholar] [CrossRef]
- Pota, H.R.; Hossain, M.J.; Mahmud, M.; Gadh, R. Control for microgrids with inverter connected renewable energy resources. In Proceedings of the IEEE PES General Meeting| Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5. [Google Scholar]
- Lu, L.Y.; Chu, C.C. Consensus-based droop control synthesis for multiple DICs in isolated micro-grids. IEEE Trans. Power Syst. 2015, 30, 2243–2256. [Google Scholar] [CrossRef]
- Yu, X.; Khambadkone, A.M.; Wang, H.; Terence, S.T.S. Control of parallel-connected power converters for low-voltage microgrid—Part I: A hybrid control architecture. IEEE Trans. Power Electron. 2010, 25, 2962–2970. [Google Scholar] [CrossRef]
- Delghavi, M.B.; Yazdani, A. An adaptive feedforward compensation for stability enhancement in droop-controlled inverter-based microgrids. IEEE Trans. Power Deliv. 2011, 26, 1764–1773. [Google Scholar] [CrossRef]
- Xinchun, L.; Feng, F.; Shanxu, D.; Yong, K.; Jian, C. The droop characteristic decoupling control of parallel connected UPS with no control interconnection. In Proceedings of the 2003 IEEE International Electric Machines and Drives Conference, Madison, WI, USA, 1–4 June 2003; IEEE: Piscataway, NJ, USA, 2003; Volume 3, pp. 1777–1780. [Google Scholar]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Cañizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in microgrid control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Han, Y.; Li, H.; Shen, P.; Coelho, E.A.A.; Guerrero, J.M. Review of active and reactive power sharing strategies in hierarchical controlled microgrids. IEEE Trans. Power Electron. 2017, 32, 2427–2451. [Google Scholar] [CrossRef]
- Barklund, E.; Pogaku, N.; Prodanovic, M.; Hernandez-Aramburo, C.; Green, T.C. Energy management in autonomous microgrid using stability-constrained droop control of inverters. IEEE Trans. Power Electron. 2008, 23, 2346–2352. [Google Scholar] [CrossRef]
- Chandorkar, M.C.; Divan, D.M.; Adapa, R. Control of parallel connected inverters in standalone AC supply systems. IEEE Trans. Ind. Appl. 1993, 29, 136–143. [Google Scholar] [CrossRef]
- Marwali, M.N.; Jung, J.W.; Keyhani, A. Control of distributed generation systems-Part II: Load sharing control. IEEE Trans. Power Electron. 2004, 19, 1551–1561. [Google Scholar] [CrossRef]
- Engler, A.; Osika, O.; Barnes, M.; Hatziargyriou, N. DB2 Evaluation of the Local Controller Strategies; European Commission: Brussels, Belgium; Luxembourg, 2005. [Google Scholar]
- Bhuiyan, F.A.; Yazdani, A. Multimode control of a DFIG-based wind-power unit for remote applications. IEEE Trans. Power Deliv. 2009, 24, 2079–2089. [Google Scholar] [CrossRef]
- Bottrell, N.; Prodanovic, M.; Green, T.C. Dynamic stability of a microgrid with an active load. IEEE Trans. Power Electron. 2013, 28, 5107–5119. [Google Scholar] [CrossRef]
- Pogaku, N.; Prodanović, M.; Green, T.C. Modeling, analysis and testing of autonomous operation of an inverter-based microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Matas, J.; Vicuna, D.; García, L.; Castilla, M.; Miret, J. Wireless-control strategy for parallel operation of distributed-generation inverters. IEEE Trans. Ind. Electron. 2006, 53, 1461–1470. [Google Scholar] [CrossRef]
- Yao, W.; Chen, M.; Matas, J.; Guerrero, J.M.; Qian, Z.M. Design and analysis of the droop control method for parallel inverters considering the impact of the complex impedance on the power sharing. IEEE Trans. Ind. Electron. 2011, 58, 576–588. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Matas, J.; De Vicuña, L.G.; Castilla, M.; Miret, J. Decentralized control for parallel operation of distributed generation inverters using resistive output impedance. IEEE Trans. Ind. Electron. 2007, 54, 994–1004. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W. Analysis, design, and implementation of virtual impedance for power electronics interfaced distributed generation. IEEE Trans. Ind. Appl. 2011, 47, 2525–2538. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W.; Guerrero, J.M.; Blaabjerg, F.; Vasquez, J.C. An islanding microgrid power sharing approach using enhanced virtual impedance control scheme. IEEE Trans. Power Electron. 2013, 28, 5272–5282. [Google Scholar] [CrossRef]
- Li, Y.W.; Kao, C.N. An accurate power control strategy for power-electronics-interfaced distributed generation units operating in a low-voltage multibus microgrid. IEEE Trans. Power Electron. 2009, 24, 2977–2988. [Google Scholar]
- Guerrero, J.M.; Vicuña, D.; García, L.; Matas, J.; Castilla, M.; Miret, J. Output impedance design of parallel-connected UPS inverters with wireless load-sharing control. IEEE Trans. Ind. Electron. 2005, 52, 1126–1135. [Google Scholar] [CrossRef]
- De Brabandere, K.; Bolsens, B.; Van den Keybus, J.; Woyte, A.; Driesen, J.; Belmans, R. A voltage and frequency droop control method for parallel inverters. IEEE Trans. Power Electron. 2007, 22, 1107–1115. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.W. Power management of inverter interfaced autonomous microgrid based on virtual frequency-voltage frame. IEEE Trans. Smart Grid 2011, 2, 30–40. [Google Scholar] [CrossRef]
- Rokrok, E.; Golshan, M. Adaptive voltage droop scheme for voltage source converters in an islanded multibus microgrid. IET Gener. Transm. Distrib. 2010, 4, 562–578. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W. An enhanced microgrid load demand sharing strategy. IEEE Trans. Power Electron. 2012, 27, 3984–3995. [Google Scholar] [CrossRef]
- Hossain, M.; Pota, H.; Haruni, A.; Hossain, M. Over-voltage limiter of an inverter to improve microgrid reliability during unpredictable cases. In Proceedings of the Innovative Smart Grid Technologies-Asia (ISGT-Asia), Melbourne, Australia, 28 November–1 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 406–411. [Google Scholar]
- Engler, A.; Soultanis, N. Droop control in LV-grids. In Proceedings of the International Conference on Future Power Systems, Amsterdam, The Netherlands, 16–18 November 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 1–6. [Google Scholar]
- Sao, C.K.; Lehn, P.W. Control and power management of converter fed microgrids. IEEE Trans. Power Syst. 2008, 23, 1088–1098. [Google Scholar] [CrossRef]
- Au-Yeung, J.; Vanalme, G.M.; Myrzik, J.M.; Karaliolios, P.; Bongaerts, M.; Bozelie, J.; Kling, W.L. Development of a voltage and frequency control strategy for an autonomous LV network with distributed generators. In Proceedings of the 44th International Universities Power Engineering Conference (UPEC), Glasgow, UK, 1–4 September 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–5. [Google Scholar]
- Vasquez, J.C.; Mastromauro, R.A.; Guerrero, J.M.; Liserre, M. Voltage support provided by a droop-controlled multifunctional inverter. IEEE Trans. Ind. Electron. 2009, 56, 4510–4519. [Google Scholar] [CrossRef]
- Perreault, D.J.; Selders, R.L.; Kassakian, J.G. Frequency-based current-sharing techniques for paralleled power converters. IEEE Trans. Power Electron. 1998, 13, 626–634. [Google Scholar] [CrossRef]
- Tuladhar, A.; Jin, H.; Unger, T.; Mauch, K. Control of parallel inverters in distributed AC power systems with consideration of line impedance effect. IEEE Trans. Ind. Appl. 2000, 36, 131–138. [Google Scholar] [CrossRef]
- Vandoorn, T.L.; Meersman, B.; Degroote, L.; Renders, B.; Vandevelde, L. A control strategy for islanded microgrids with dc-link voltage control. IEEE Trans. Power Deliv. 2011, 26, 703–713. [Google Scholar] [CrossRef]
- Shafiee, Q.; Guerrero, J.M.; Vasquez, J.C. Distributed secondary control for islanded microgrids—A novel approach. IEEE Trans. Power Electron. 2014, 29, 1018–1031. [Google Scholar] [CrossRef]
- Hu, J.; Zhu, J.; Dorrell, D.G.; Guerrero, J.M. Virtual Flux Droop Method—A New Control Strategy of Inverters in Microgrids. IEEE Trans. Power Electron. 2014, 29, 4704–4711. [Google Scholar] [CrossRef]
- Golsorkhi, M.S.; Lu, D.D. A control method for inverter-based islanded microgrids based on VI droop characteristics. IEEE Trans. Power Deliv. 2015, 30, 1196–1204. [Google Scholar] [CrossRef]
- Li, Y.; Fan, L. Stability Analysis of Two Parallel Converters with Voltage-Current Droop Control. IEEE Trans. Power Deliv. 2017, PP, 1. [Google Scholar] [CrossRef]
- Ashabani, M.; Yasser, A.R.M.; Mirsalim, M.; Aghashabani, M. Multivariable droop control of synchronous current converters in weak grids/microgrids with decoupled dq-axes currents. IEEE Trans. Smart Grid 2015, 6, 1610–1620. [Google Scholar] [CrossRef]
- Vasquez, J.C.; Guerrero, J.M.; Luna, A.; Rodríguez, P.; Teodorescu, R. Adaptive droop control applied to voltage-source inverters operating in grid-connected and islanded modes. IEEE Trans. Ind. Electron. 2009, 56, 4088–4096. [Google Scholar] [CrossRef]
- Lee, C.T.; Chu, C.C.; Cheng, P.T. A new droop control method for the autonomous operation of distributed energy resource interface converters. IEEE Trans. Power Electron. 2013, 28, 1980–1993. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Weiss, G. Synchronverters: Inverters that mimic synchronous generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Natarajan, V.; Weiss, G. Synchronverters with better stability due to virtual inductors, virtual capacitors and anti-windup. IEEE Trans. Ind. Electron. 2017, 64, 5994–6004. [Google Scholar] [CrossRef]
- Ma, Y.; Cao, W.; Yang, L.; Wang, F.; Tolbert, L.M. Virtual Synchronous Generator Control of Full Converter Wind Turbines with Short Term Energy Storage. IEEE Trans. Ind. Electron. 2017, PP, 1. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of dynamic characteristics between virtual synchronous generator and droop control in inverter-based distributed generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Bevrani, H.; Ise, T. Enhanced virtual synchronous generator control for parallel inverters in microgrids. IEEE Trans. Smart Grid 2016, 8, 2268–2277. [Google Scholar] [CrossRef]
- Dreidy, M.; Mokhlis, H.; Mekhilef, S. Inertia response and frequency control techniques for renewable energy sources: A review. Renew. Sustain. Energy Rev. 2017, 69, 144–155. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Yoo, H.J.; Kim, H.M. A flywheel energy storage system based on a doubly fed induction machine and battery for microgrid control. Energies 2015, 8, 5074–5089. [Google Scholar] [CrossRef]
- Rasheduzzaman, M.; Mueller, J.A.; Kimball, J.W. An Accurate Small-Signal Model of Inverter-Dominated Islanded Microgrids Using dq Reference Frame. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1070–1080. [Google Scholar] [CrossRef]
- Yu, K.; Ai, Q.; Wang, S.; Ni, J.; Lv, T. Analysis and optimization of droop controller for microgrid system based on small-signal dynamic model. IEEE Trans. Smart Grid 2016, 7, 695–705. [Google Scholar] [CrossRef]
- Dheer, D.K.; Soni, N.; Doolla, S. Improvement of small signal stability margin and transient response in inverter-dominated microgrids. Sustain. Energy Grids Netw. 2016, 5, 135–147. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Methods | Advantages | Disadvantages |
|---|---|---|
| Classical control PI | Simple control structures and easy implementation | Performance degradation during disturbances |
| A zero steady-state error in frame | Steady-state error in an unbalance system | |
| Proportional Resonant (PR) | Improved performance with a robust inner current controller | Sensitive to frequency variation |
| Almost zero steady-state error | Difficulty in controlling harmonics | |
| Low computational burden and implementation complexity | Require accurate tuning | |
| Dead-beat controller (DB) | Suitable for harmonics control | Require accurate filter model |
| Fast transient response with low THD and sampling frequency | Sensitive to network parameters | |
| Predictive control | Suitable for use in non-linear system | Require accurate filter model |
| Require less switching frequency | Require extensive calculations | |
| Accurate current control with lower THD and harmonic noise | Sensitive to parameter variations | |
| Hysteresis current control | Easy and simple implementation | Resonance problems |
| Fast transient response | Limited to lower power levels | |
| Inherent current protection | Error in current tracking and harmonic issues | |
| H controller | A very low THD and improved performance | Require deep mathematical understanding |
| Robust performance in linear and non-linear/unbalance loads | Relatively slow dynamics | |
| Reduced tracking error | ||
| Repetitive Controller (RC) | Robust performance during periodic disturbances | Stabilising problem |
| A zero steady-state error at all harmonic frequencies | Slow response during load fluctuations | |
| Neural networks | Good performance in current control | A slow dynamic response |
| Apply in static mode | ||
| Fuzzy control methods | Not influence by parameter variations and operational points | Slow control method |
| Suitable for a large-scale non-linear system with easy design | ||
| Sliding Mode Control (SMC) | Reliable performance during transients | Chattering Phenomenon in discrete implementation |
| Control over THD based on design | Difficulty in designing procedure | |
| Good disturbance rejection | ||
| LQR controller | Fast dynamic response | Phase shift in voltage tracking during normal operation |
| Easy design procedure | Voltage tracking error during disturbances | |
| Good tracking performance | Difficulty in extracting model | |
| LQI controller | Fast dynamic response | Phase shift in voltage tracking during normal operation |
| Simple design procedure | Difficulty in extracting model | |
| Good tracking performance even after disturbances |
| Type | R (/km) | X (/km) | (A) | R/X |
|---|---|---|---|---|
| LV | 0.642 | 0.083 | 142 | 7.73 |
| MV | 0.161 | 0.190 | 396 | 0.85 |
| HV | 0.060 | 0.191 | 580 | 0.31 |
| Control Methods | Advantages | Disadvantages |
|---|---|---|
| P/f droop | Suitable for high and medium voltage line | Sluggish dynamic response |
| Not dependable on communication line | Poor reactive power regulation | |
| Easy implementation and flexible expansion | Sensitive in physical components | |
| P/V droop | Suitable for low voltage transmission line | Sluggish dynamic response |
| Not dependable on communication line | Poor active power regulation | |
| Easy implementation and flexible expansion | Sensitive in physical components | |
| Adaptive derivation | Enhanced power sharing | Not suitable for complex network |
| Eliminating voltage and frequency distortion | Difficulty in implementation of multiple DGs | |
| Improving dynamic stability of power sharing | ||
| Frequency based signal injection | Suitable for different types of load application | Harmonic issue in voltage control |
| Robustness in system parameter variation | Complicated implementation | |
| Voltage based droop | Suitable for high resistive network | Difficulty in practical implementation |
| Suitable for renewable energy control | Voltage varies during load changes | |
| Easy power balancing | ||
| Virtual flux control | Improved frequency control | Implementation difficulty in a large system |
| Simple control structure | Slow dynamic performance | |
| V/I droop control | Improved faster dynamic | Oscillation issue for small droop coefficients |
| Ensure accurate real and reactive power sharing | Voltage issue under heavy load conditions | |
| Suitable for small inertia DG units |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hossain, M.A.; Pota, H.R.; Issa, W.; Hossain, M.J. Overview of AC Microgrid Controls with Inverter-Interfaced Generations. Energies 2017, 10, 1300. https://doi.org/10.3390/en10091300
Hossain MA, Pota HR, Issa W, Hossain MJ. Overview of AC Microgrid Controls with Inverter-Interfaced Generations. Energies. 2017; 10(9):1300. https://doi.org/10.3390/en10091300
Chicago/Turabian StyleHossain, Md Alamgir, Hemanshu Roy Pota, Walid Issa, and Md Jahangir Hossain. 2017. "Overview of AC Microgrid Controls with Inverter-Interfaced Generations" Energies 10, no. 9: 1300. https://doi.org/10.3390/en10091300
APA StyleHossain, M. A., Pota, H. R., Issa, W., & Hossain, M. J. (2017). Overview of AC Microgrid Controls with Inverter-Interfaced Generations. Energies, 10(9), 1300. https://doi.org/10.3390/en10091300