4.1. Distributed MPC in ADN
The distributed control usually has two types. The first one; the control problem is split into several parts at the boundary point. These sub-problems are solved by alternating iteration. The second one; the control problem is separated into several coupled sub-problems according to the arrangement of controllers and category of the controlled object. These coupled sub-problems are solved by transmitting coupling information [
34].
Considering the calculation speed and the existing control system, the second type is more suitable for ADN.
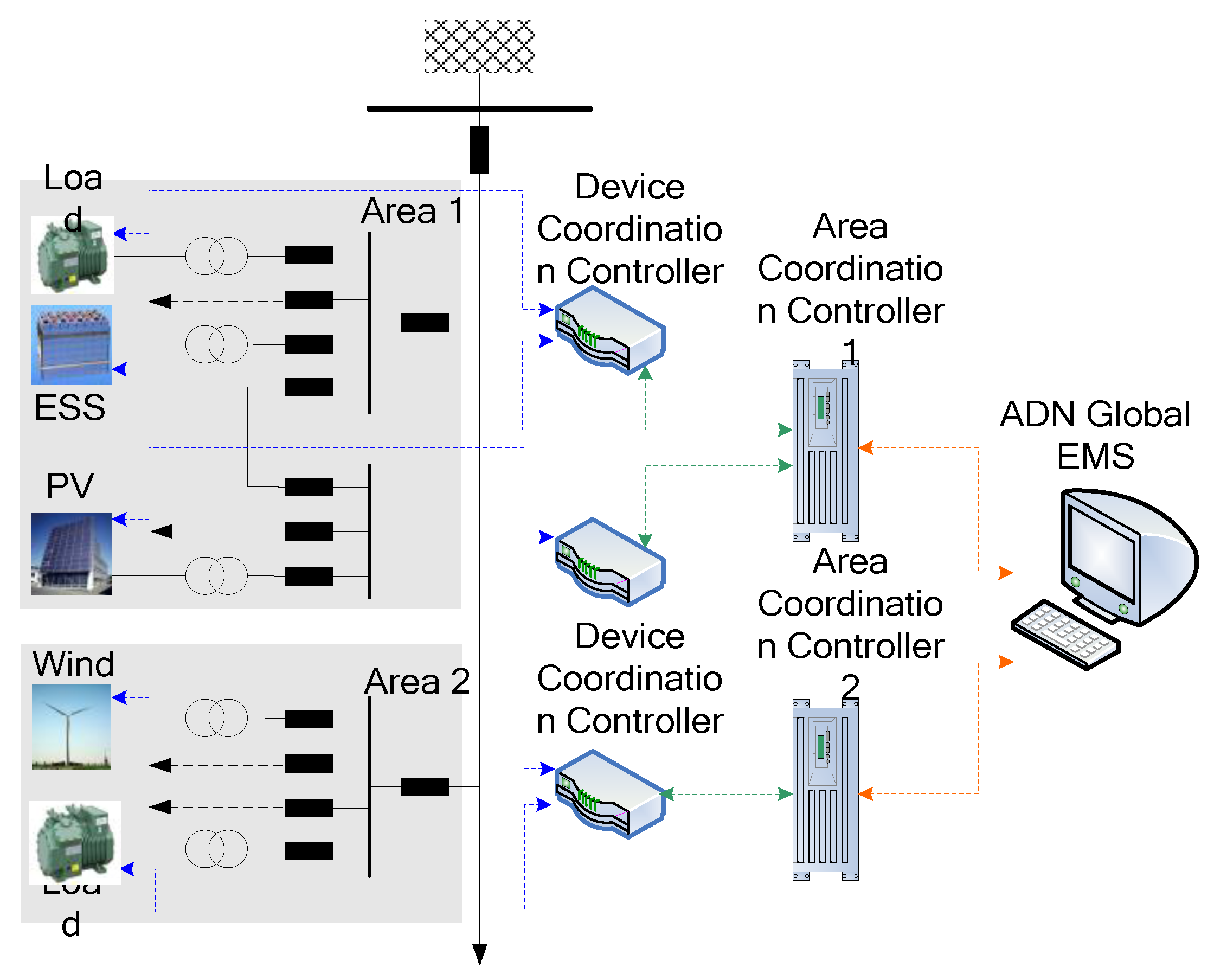
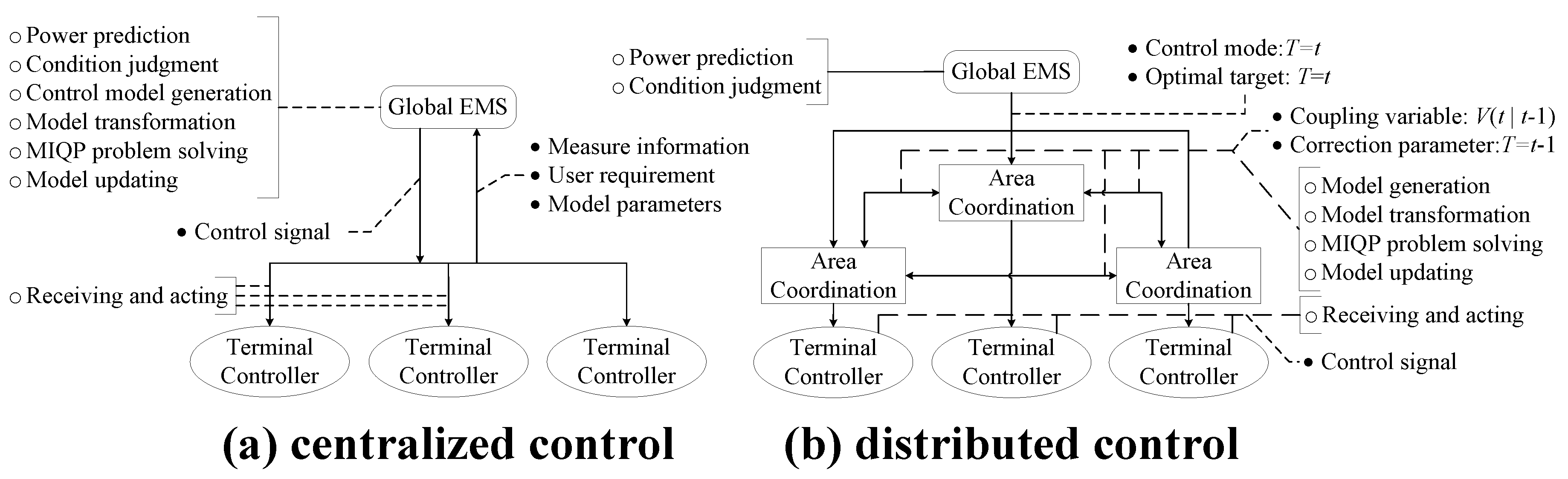
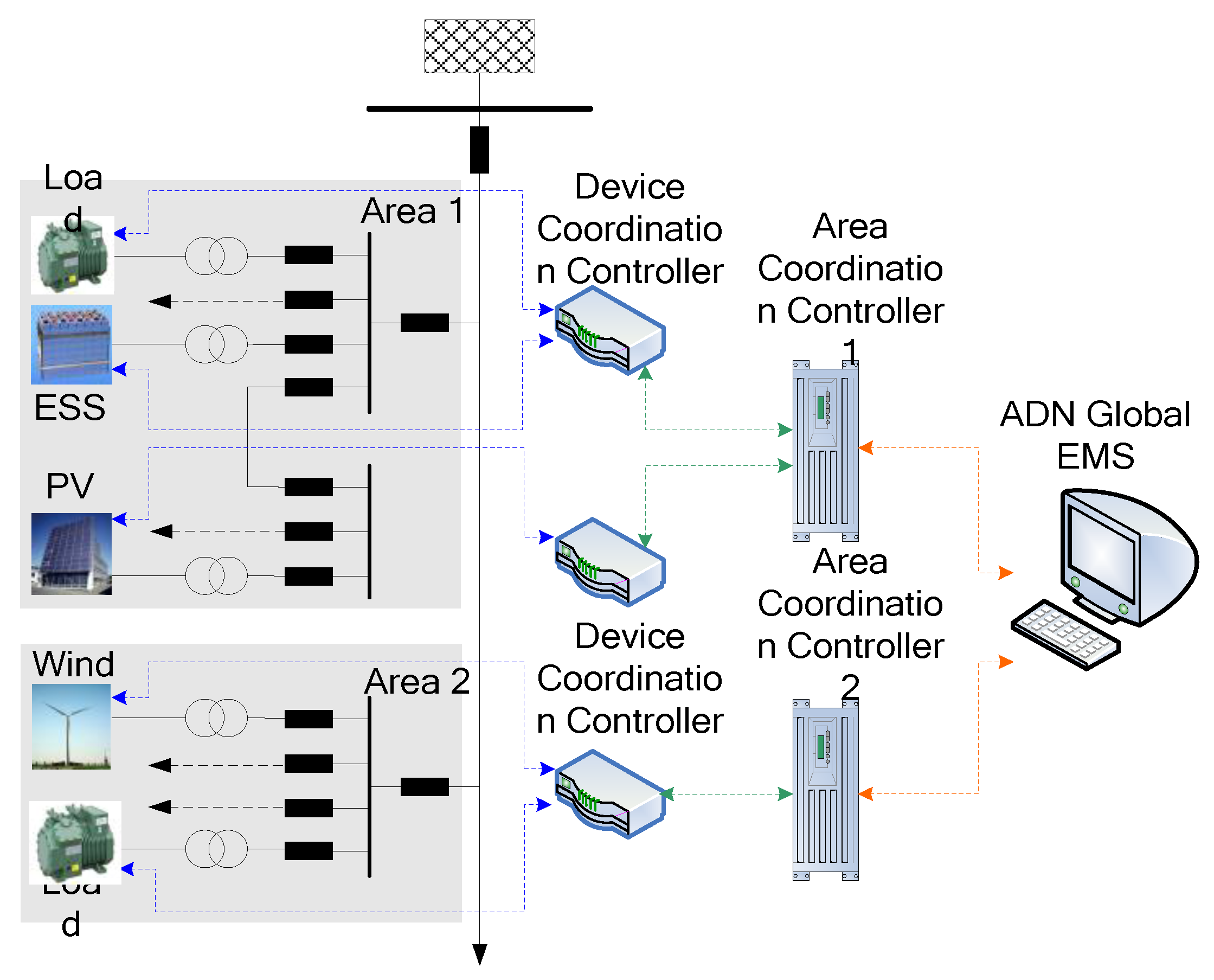
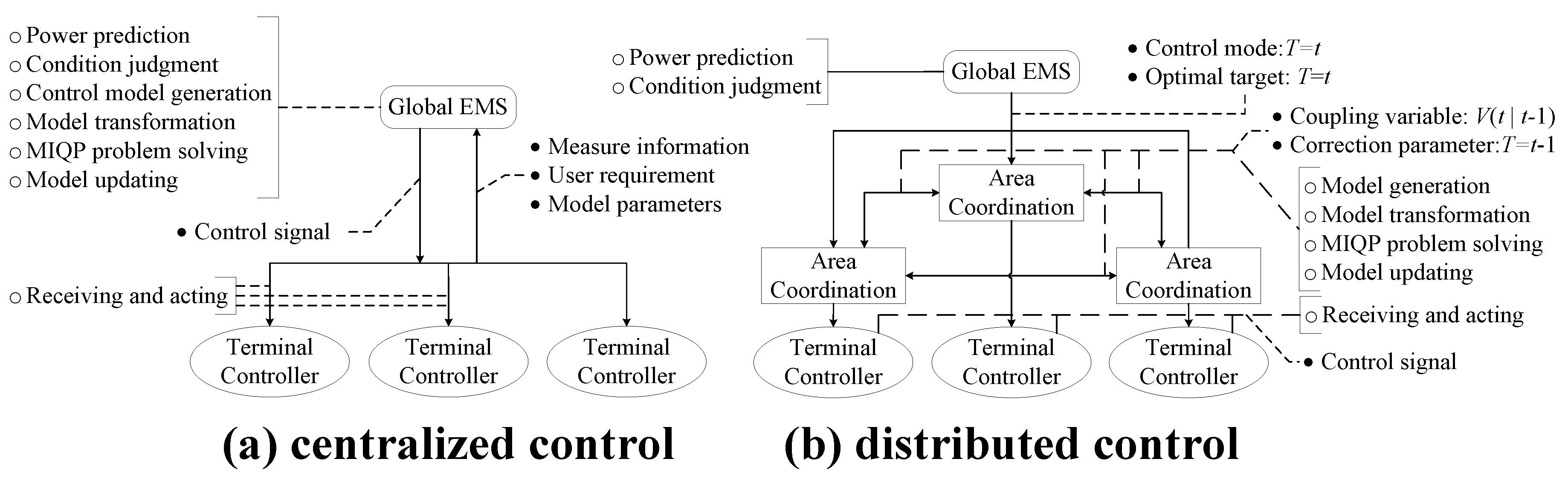
Figure 11 shows the differences between distributed control and centralized control in
Section 3 of the ADN flexible load when power shortage happens in the feeder. There are three main differences.
Difference (1): Control structure. The centralized control only has two control levels, global EMS and terminal controller, and all the information is exchanged between these two levels. The distributed mode contains three levels, and the communication not only appears between levels, but also appears between controllers in the same level.
Difference (2): Control task. The hollow circles in
Figure 11 indicate the main tasks of each control level. In centralized mode, the global EMS undertakes almost all the modeling and computation but in distributed mode, some tasks are assigned to the area coordination control level.
Difference (3): Control information. The solid circles in
Figure 11 show the main information exchanged in the control process. The distributed model adds coupling information transmission of the same level, and because the coupling information is not generated in real time, there is therefore some information of a different time.
Even though, in distributed control, the optimal performance may be lost and the complexity of communication is increased, the control model is simplified significantly and computation time is reduced, also the flexibility of the control is strengthened.
4.2. Distributed Control Model and Method of Flexible Load
When the centralized control solves the optimal model, the coupling relationship between controlled objects exists naturally during the iteration. Only if all the variables including coupling variables satisfy the constraints and optimal purpose, is then the feasible solution acquired. However, the coupling is impossible to automatically appear in the distributed control process, because the sub-problems are separated; additionally, independent control makes it that every controller cannot obtain accurate and real-time state information of the coupled controllers. These two problems are solved by reconstructing the models of
Section 3.
(1) Classifying Load Controlled Object
The Load Controlled Object is a flexible loads set, and all the flexible loads of the set are controlled with the same controller. The classification relates to the load type and area, in general, loads of the same type and with similar parameter or the same time step are placed into a category. Let express the set of n × n matrices which only consists of elements 0 and 1. Introduce an incidence matrix which defines relation of n loads of s classes in ADN. Only when the matrix’s element AI(i,j) = 1, i = 1,…,s, j = 1,…,n, the j-th load belongs to the i-th class LCOi.
(2) Coupling relationship of LCOs
The coupling relationship means that several LCOs affect the optimal target, and this relationship determines if information exchange exists between controllers of the same level. Introduce an incidence vector which defines the relation between the q-th LCOq and other s − 1 LCOs. If the q-th LCOq couples with the p-th LCOp, the vector’s elements AII-q(1,p) = 1, p = 1,…,s, p ≠ q, and AII-q(1,q) = 0.
(3) Coupling variable
In Equation (6), every flexible load contributes to the optimization of total power y(t), and LCOs are the same after the n loads are classified into s LCOs. Hence, the s LCOs has a coupling relation to y(t), that is y(t) = y1(t) + + yq(t) + + ys(t).
However, each LCO is controlled by the corresponding controller, and the q-th controller Ctrlq knows the model of q-th LCOq including the state model (Equation (1)) and the power consumption model (Equation (2)). Moreover, the Ctrlq does not consider the rest of s − 1 LCOs. Because of this, other controllers such as the p-th controller Ctrlp must offer power information at time t to the Ctrlq, that is y(t) = y1|t(t) + + yq|t(t) + + ys|t(t), where yp|t is the knowable coupling variable, p = 1, …, s, and p ≠ q.
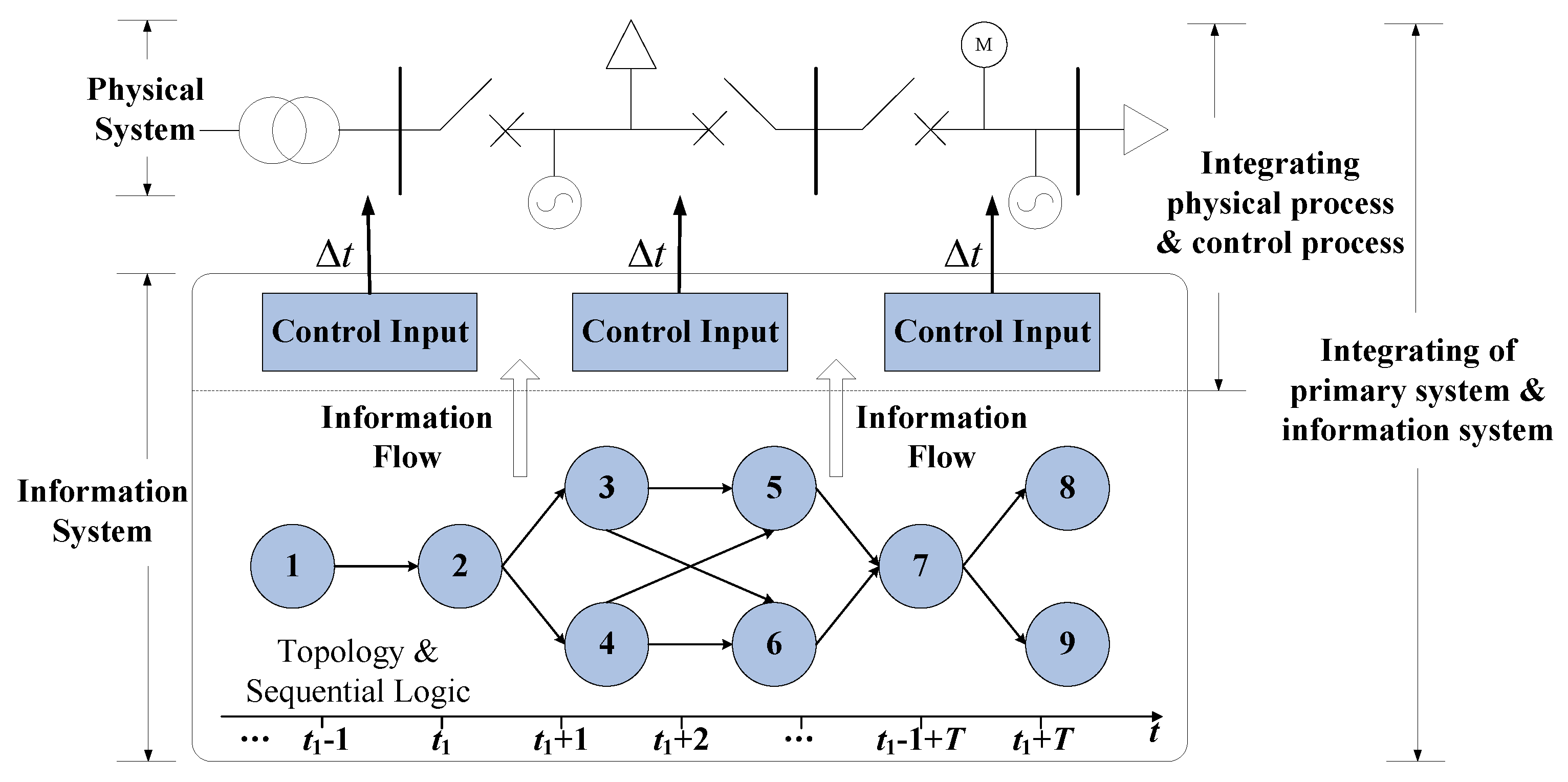
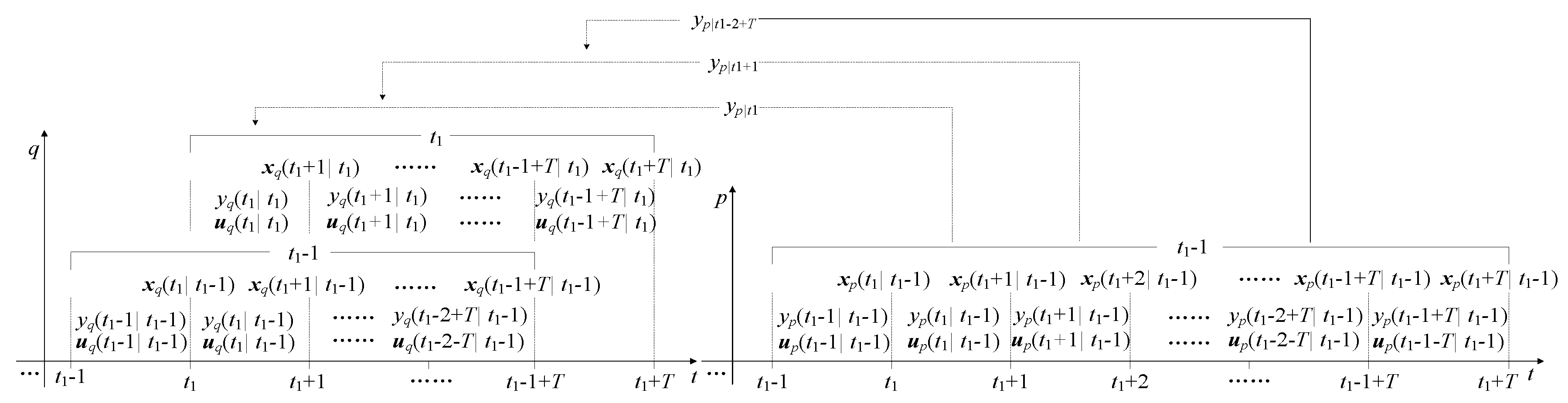
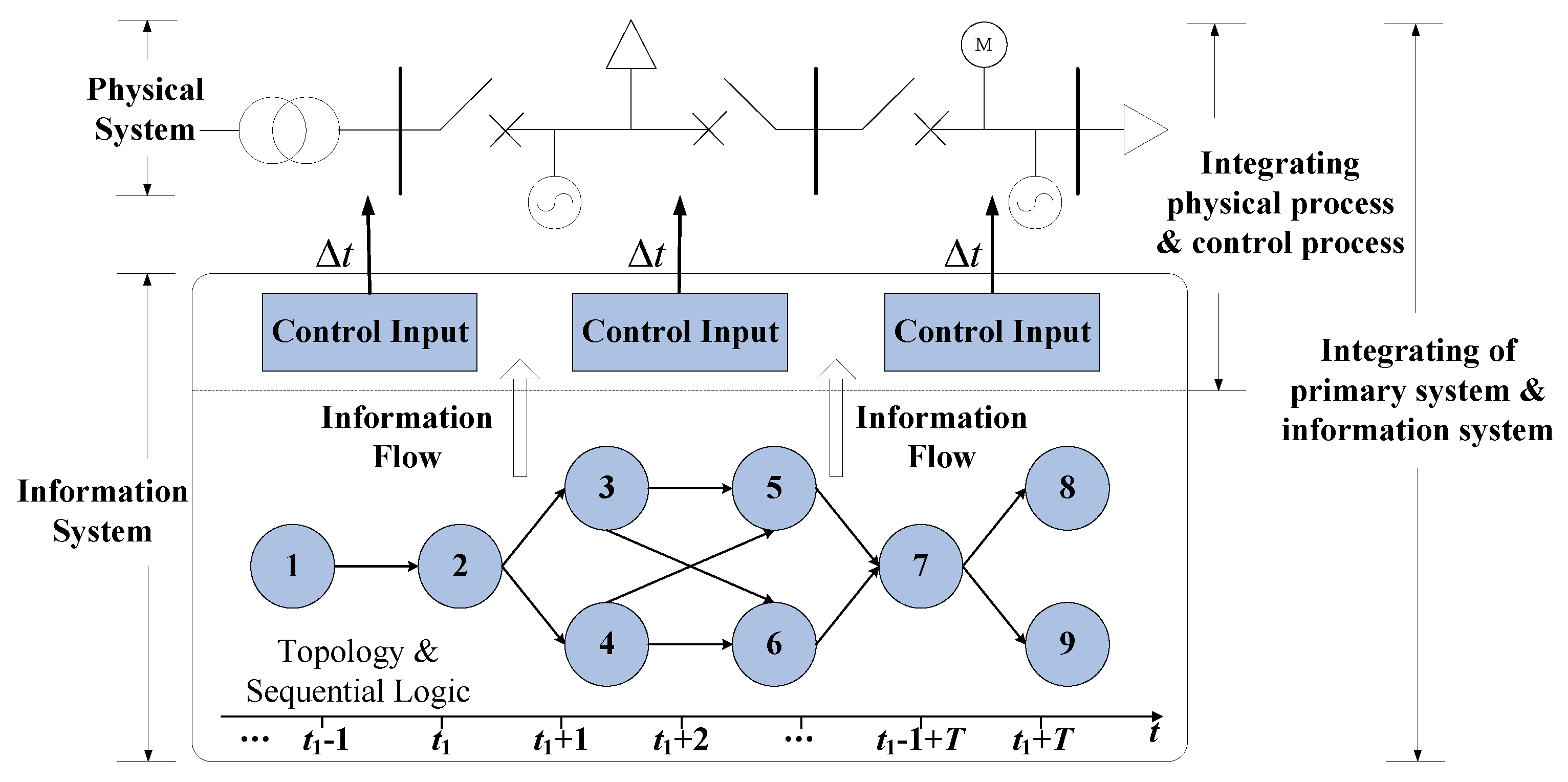
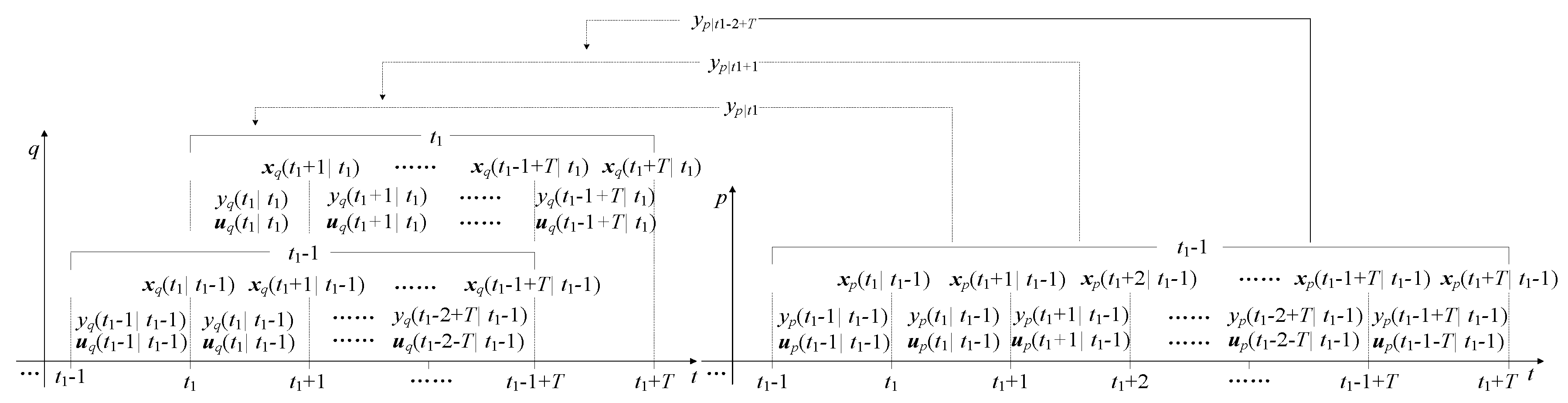
Unfortunately, at time
t, due to the same reason of lack of coupling information,
yp|t is unable to be obtained. As shown in
Figure 12, the coupling information can be replaced by the predictive control results of [
t1 − 1,
t1 − 1 +
T] which are calculated at time
t =
t1 − 1, and
T is the control period.
According to the principle of receding horizon optimization, when Ctrlq operates at time t = t − 1, it predicts the LCOq’s functional index of t = [t1, t1 − 1 + T], that is xq(t1|t1 − 1)~xq(t1 – 1 + T|t1 − 1). Then the control input uq(t1 − 1|t1 − 1)~uq(t1 − 1 + T − 1|t1 − 1) and the power yq(t1 − 1|t1 − 1)~yq(t1 − 1 + T − 1|t1 − 1) also can be obtained. Other controllers like Ctrlp get the power yp(t1 − 1|t1 − 1)~yp (t1 − 1 + T − 1|t1 − 1) too.
With the action of uq (t1|t1 − 1), Ctrlq moves to time t = t1, and a new control loop begins. At this time, set yp|t = yp(t|t1 − 1) for every step of t = [t1, t1 − 1 + T − 1].
However, for time t = t1 + T − 1, there is no yp(t1 + T − 1|t1 − 1) that can be assigned to yp|t1+T-1. Define constants yf-q and yf-p, p = 1, …, s, and p ≠ q. yf-q and yf-p consist of a power combination of all the LCOs. The power combination corresponds to a kind of load operation mode δm and satisfies , where the meaning of δm and Pm can be found in 3.3. Let yp|t1+T-1 = yf-p, in other words, the unknown coupling variable yp|t1+T -1 is set artificially based on Pm. Besides, in the first loop of control, for time t = [0, T − 1], set yp|t = yf-p.
(4) Keep the consistency of coupling variables
No matter how the coupling variable gets its value, the Ctrlp may not follow the yp|t which has been sent to Ctrlq. So, there should be some restrictions in optimal function or constraint to keep the actual trajectory of LCO consistent with the coupling variables of the coupled controllers.
In optimal function, during a control period
t = [
t1,
t1 +
T], minimizing the deviation between
yq(
t) and
yq|t, gives Equation (8).
In control model, add inequality constraints, and make the deviation between
yq(
t) and
yq|t of any step during the control period
t = [
t1,
t1 +
T] not larger than the maximal deviation in the last control period
t = [
t1 − 1,
t1 − 1 +
T]. That is Equation (9).
(5) Optimal function
The optimal function of LCOq includes the functional index deviation Jx, load consumption deviation Jy, and coupling variable deviation Jy.
Like Equation (6),
Jx keeps
xq(
t) tracing the target
xf-q in the control period
t = [
t1,
t1 +
T], that is Equation (10).
Jy contains coupling relationship of
LCOq and
LCOp, and reflects the difference of total consumption and its target. Define matrix
,
is the coupling information set of time
t which should have been sent by
s controllers to each other. Also the load consumption deviation of
LCOq is shown as Equation (11).
Jyq has been presented in Equation (8). So the optimal function is Equation (12).
(6) Control model and method
Model the s LCOs respectively based on 3.2, and MLD models as Equation (5) are acquired. Then add Equations (9) and (12) to each LCO, and the control model is completed.
The optimization problem is that s LCOs are controlled by s controllers on the basis of coupling information to get control inputs. The solution must satisfy Equations (5) and (9), and make Equation (12) optimal.
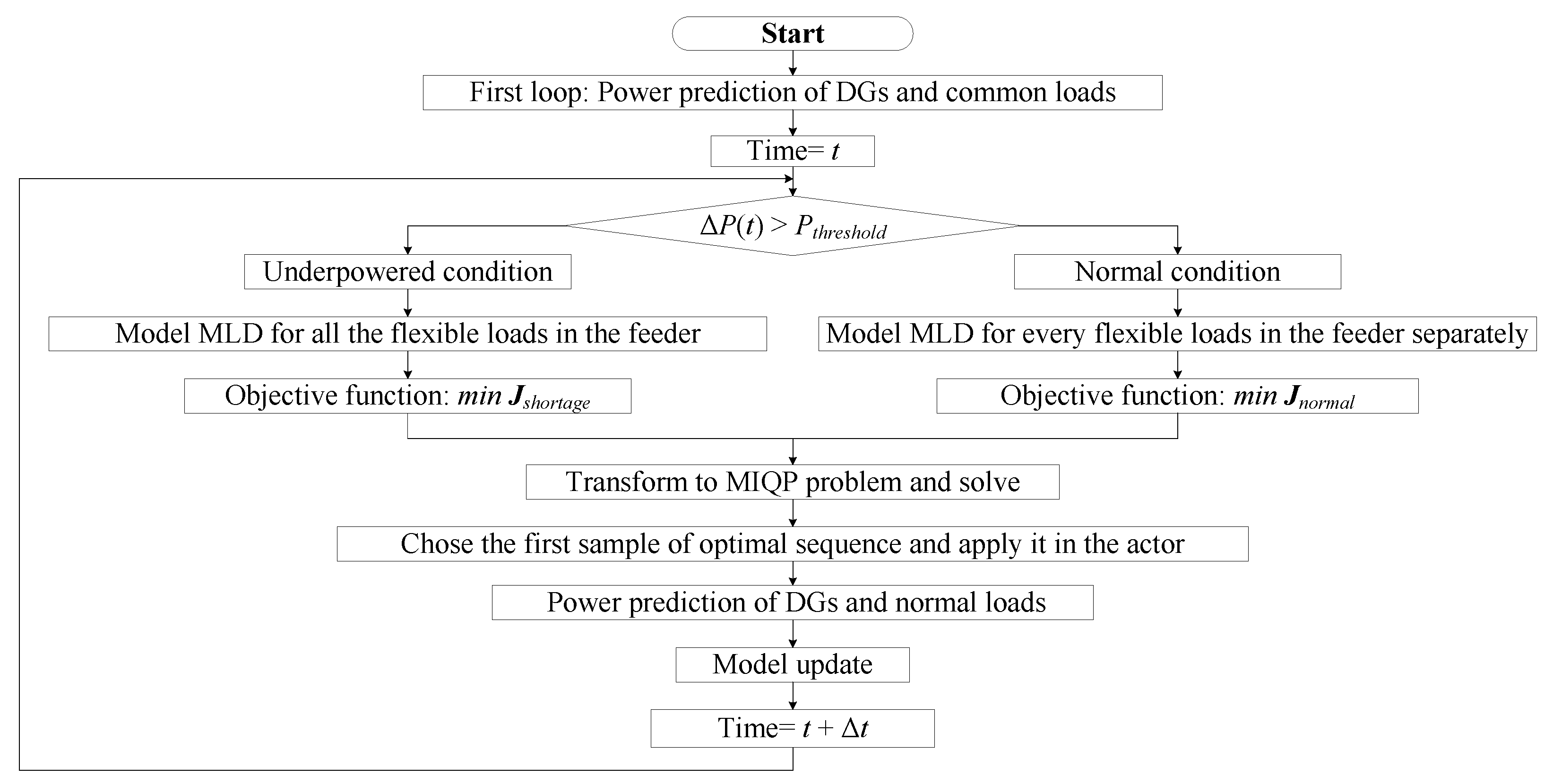
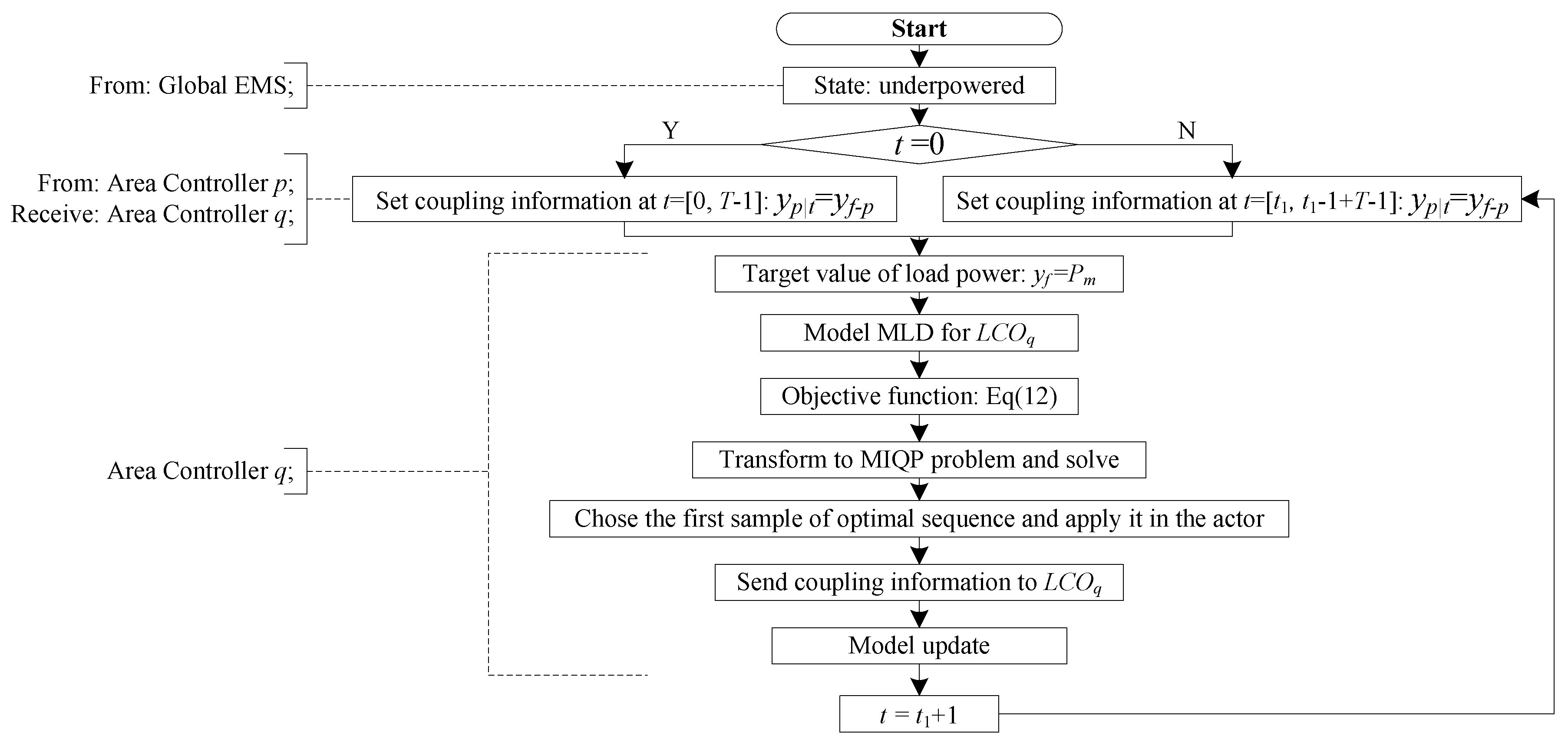
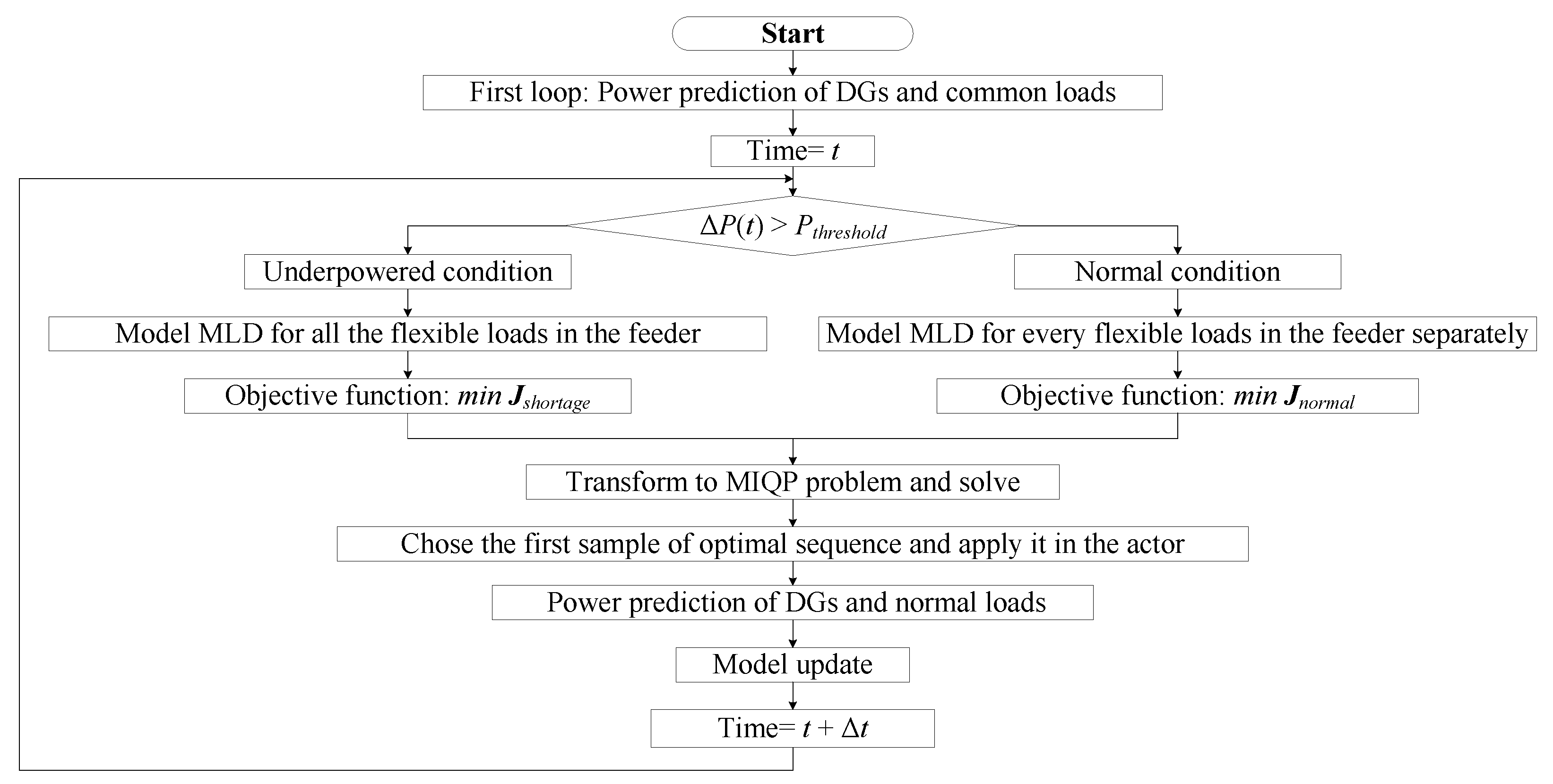
The control procedure is shown in
Figure 13. By the prediction of DGs and common loads, the ADN feeder is in the underpowered condition; every controller accepts the coupling information of the other controllers and the power consumption target from the global EMS; all the controllers generate control models of their own LCO and solve them, then act on the first sample of the optimal sequence; all the controllers send coupling information to other controllers and prepare for the next period of control.
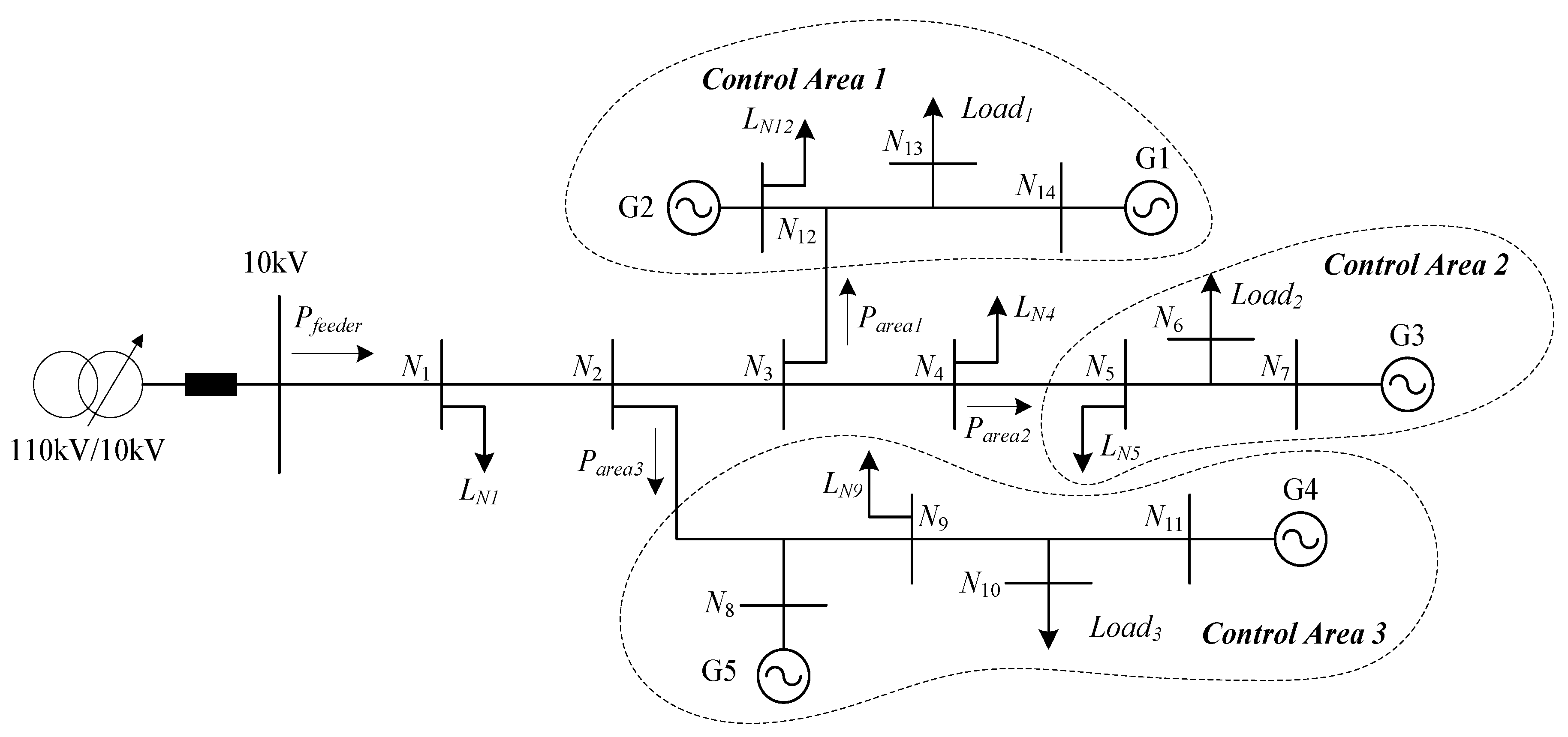
4.3. Case Study
The distribution ADN flexible load control model and method of underpowered condition is tested by the case in 3.4.
According to 4.2, the three flexible loads of
Load1,
Load2,
Load3 are classified to three LOCs of
LOC1,
LOC2,
LOC3. Based on
Table 3 and Equations (5) and (9), three MLD models of LOCs are built. Set the total power consumption target
Pm = 356 kW, then the three optimal functions can be obtained by Equation (12). The models and optimal function are controlled 100 times according to the procedure in
Figure 13.
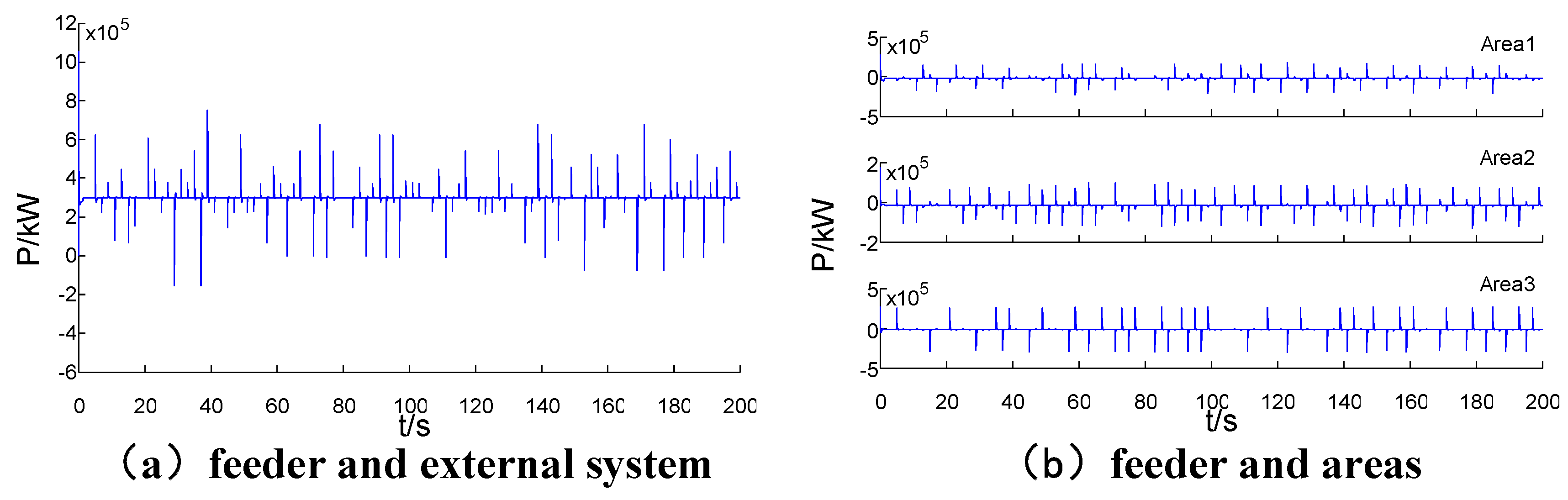
Area coordination controllers are simulated by three IBM Flex System x240 Compute Nodes, and configure another Compute Node to simulate the physical system of the ADN feeder. Each Compute Node contains two Intel Xeon E5-2600 Core6 2.1 GHz processors and 16G memory. An inbuilt Gigabit Switch is used for communication.
Matlab/Simulink is the simulating and computing tool for every Compute Node, and a Socket interface is used for software to communicate with each other. There is also a synchronous program to prevent possible asynchronous problems occurring between different Compute Nodes. So the simulation of ADN feeder including three loads does not begin, only when the feeder has received all the load control inputs from other Compute Nodes.
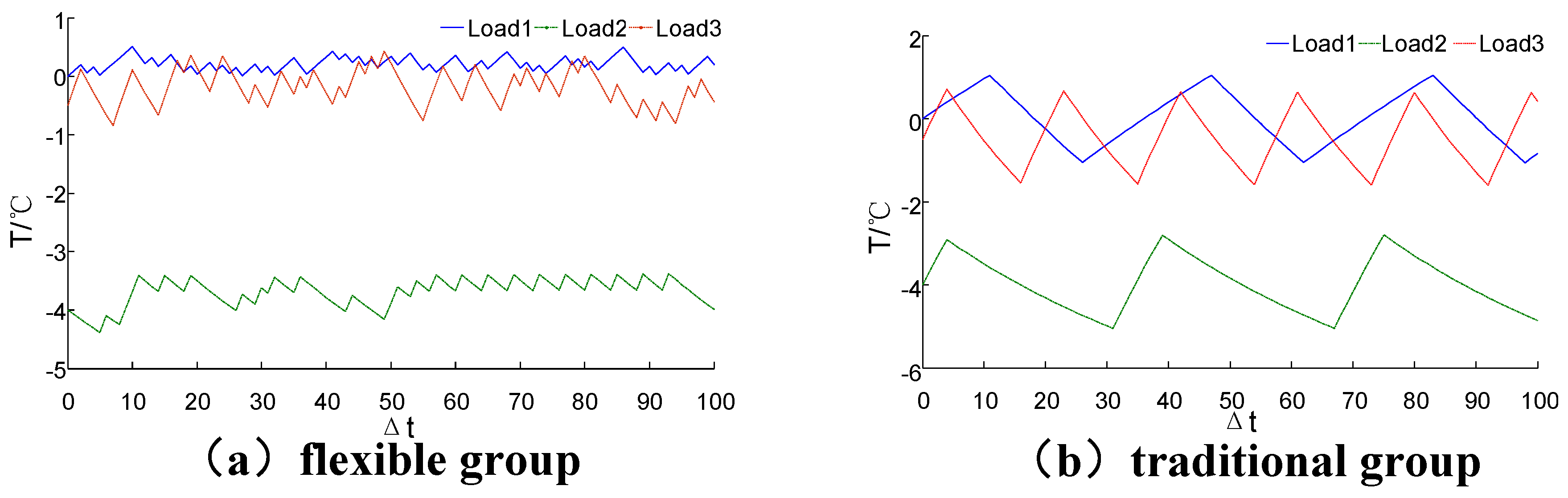
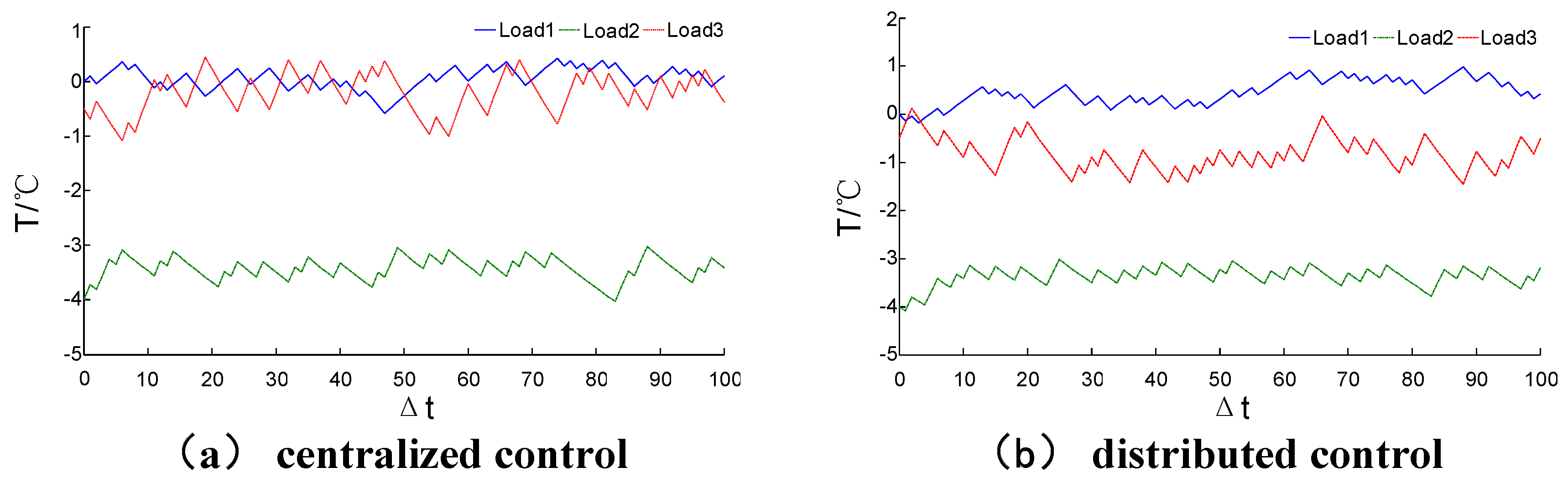
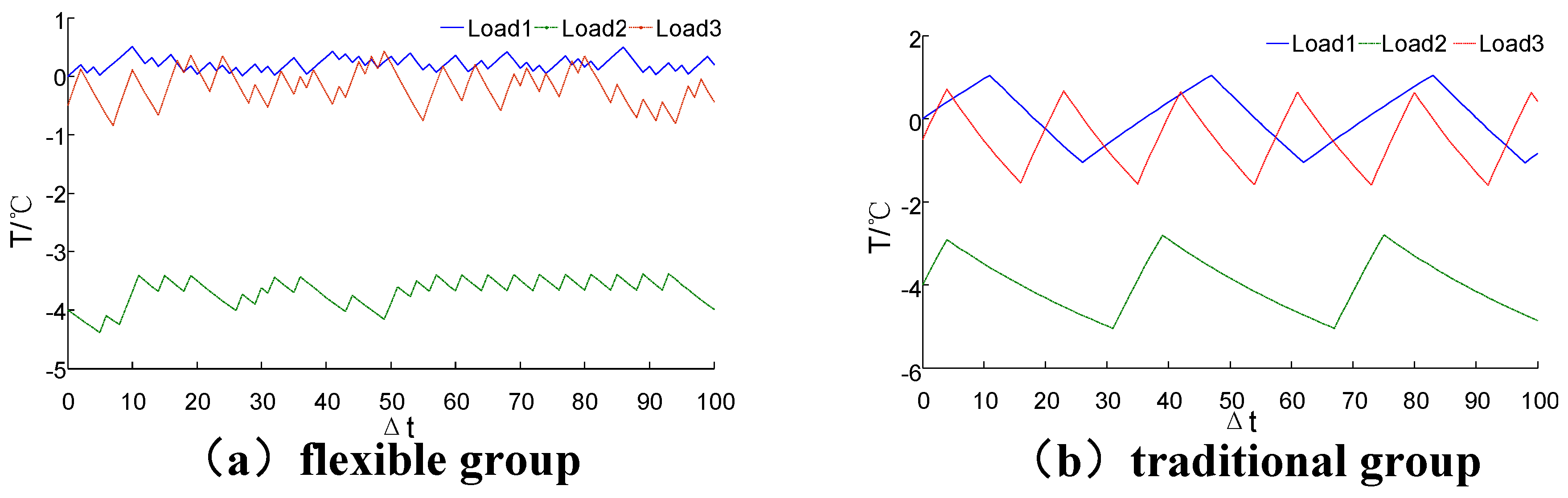
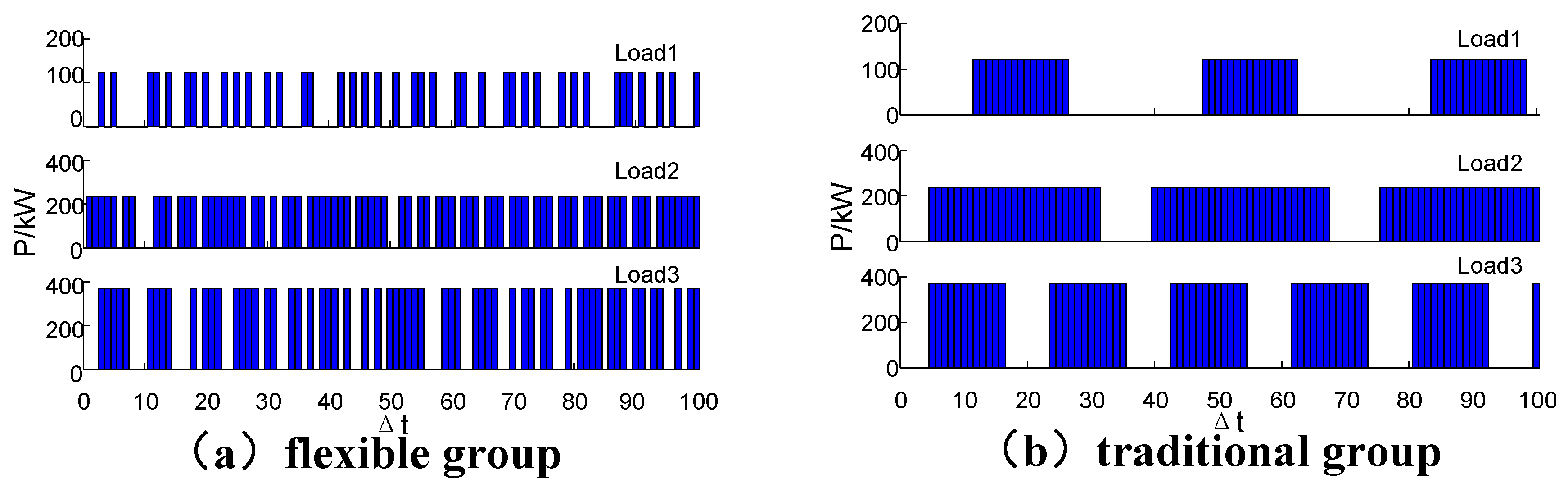
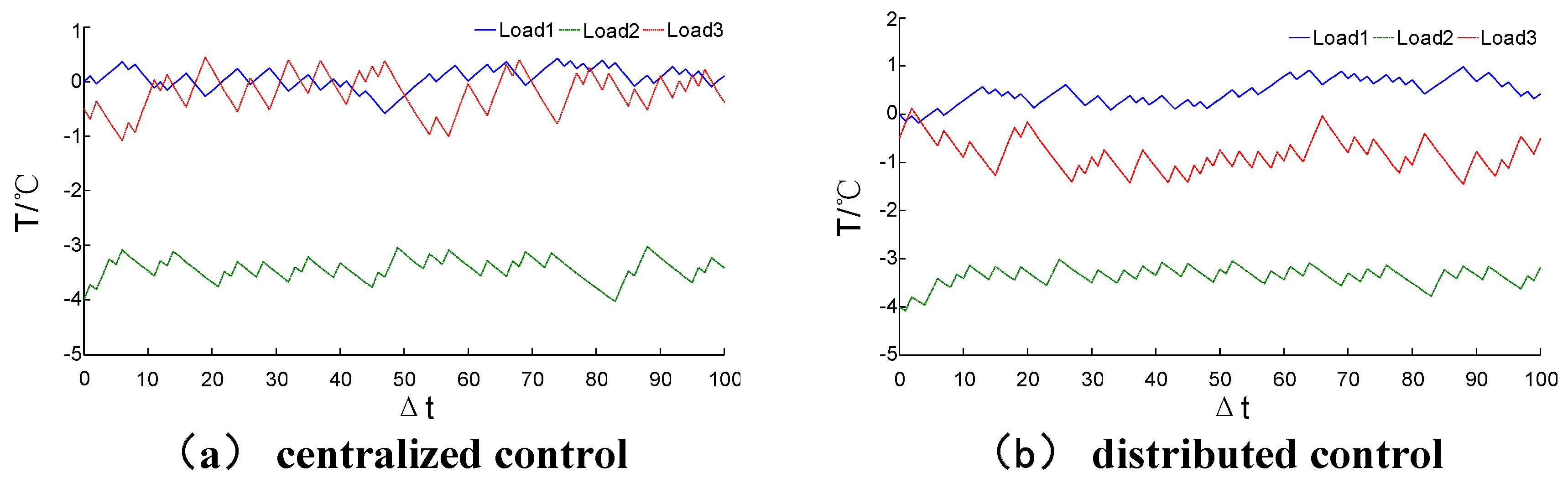
Figure 14 shows the temperature of the distributed and centralized mode in the underpowered condition. The curves of the two modes all locate in the feasible range. The three loads of the distributed mode change their states about 56, 48, and 52 times respectively, and the loads in the centralized mode change only 48, 45, 46 times. The more frequent state switching makes the loads of the distributed mode have a lower fluctuation. Especially the
Load3, it not only operates steadily, but also works at a lower temperature.
This phenomenon is caused by the method difference of how to balance the optimal target of the two modes. Load3 is the largest load, and the centralized mode considers the optimization from the overall model, so the action of Load3 should be diminished and the lower loads work more to counteract disturbance. However, in the distributed mode, the controller manages only one load, and does not need to consider other problems.
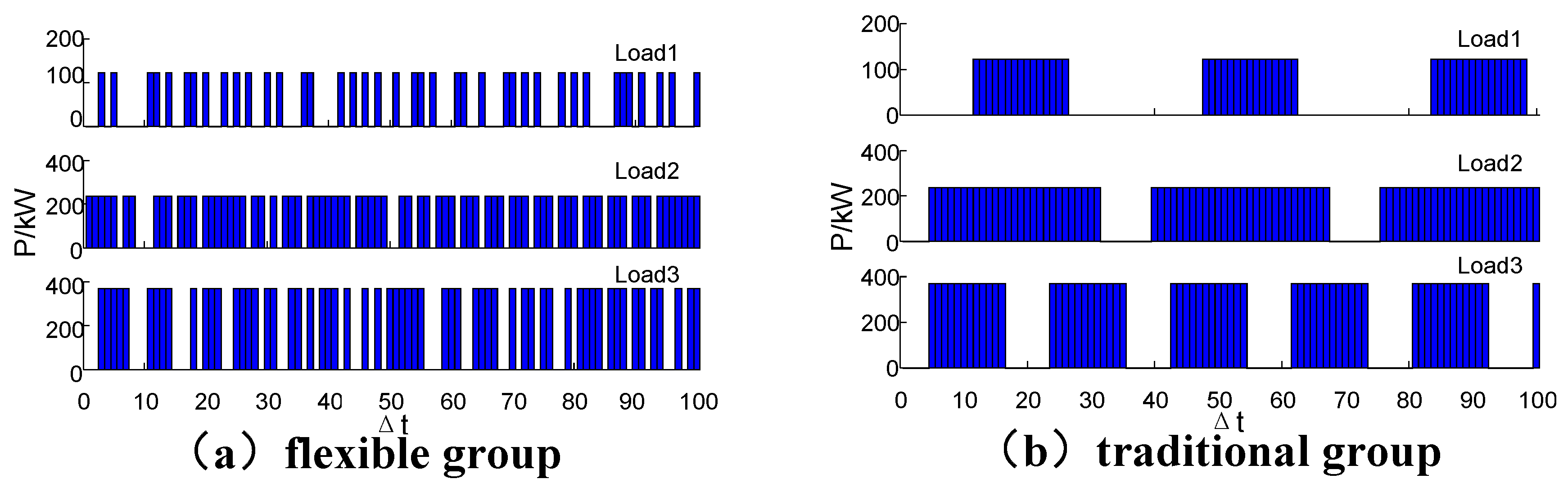
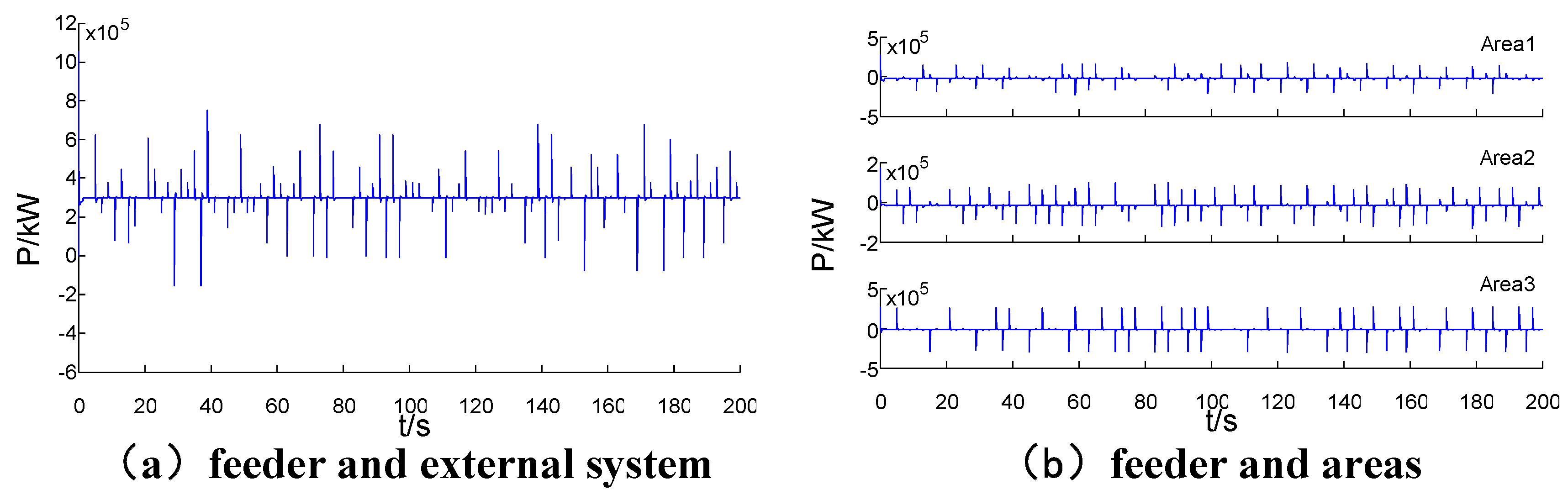
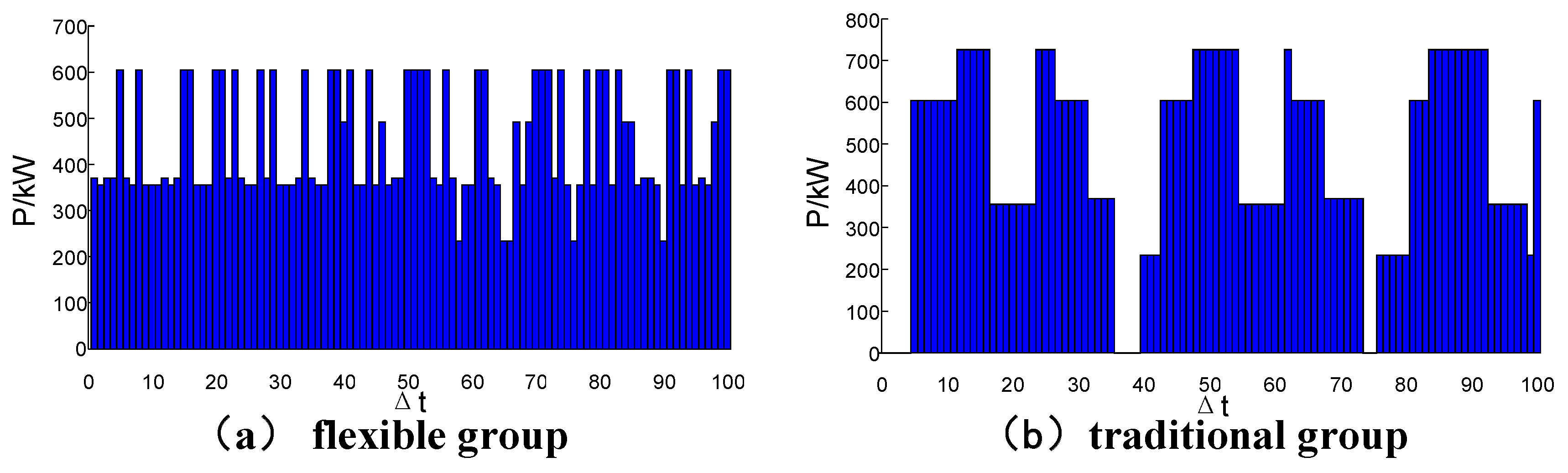
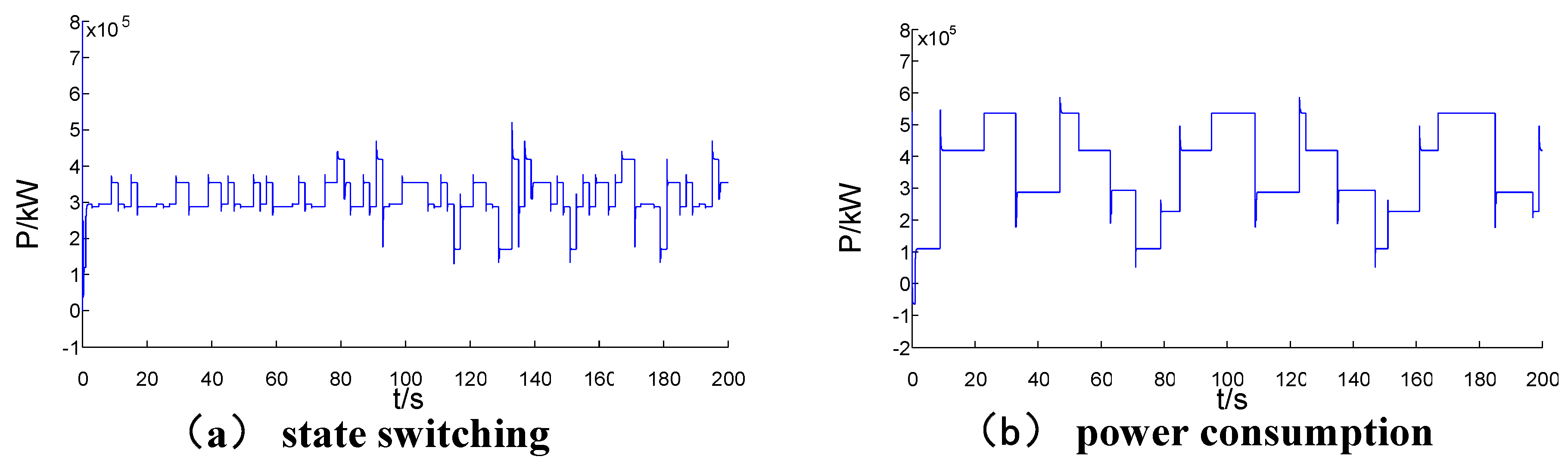
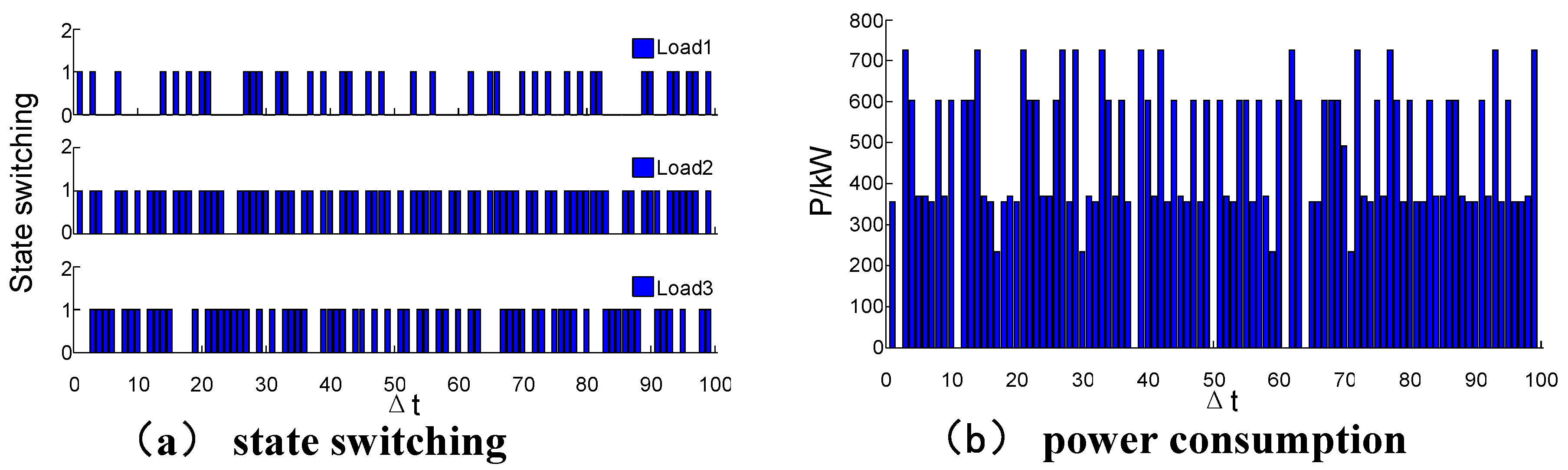
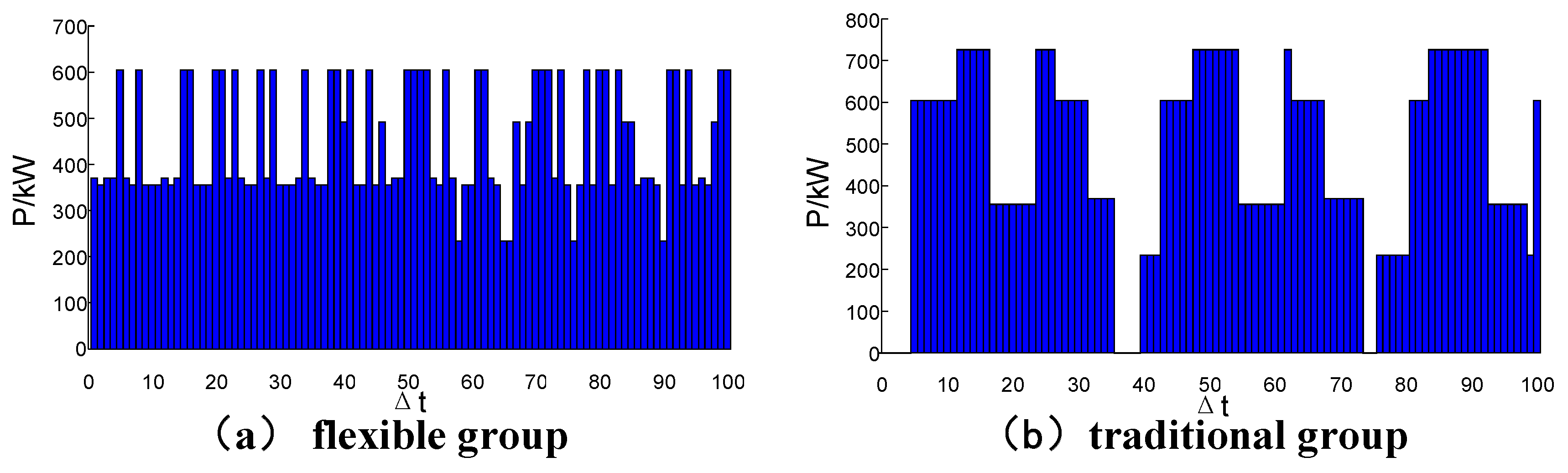
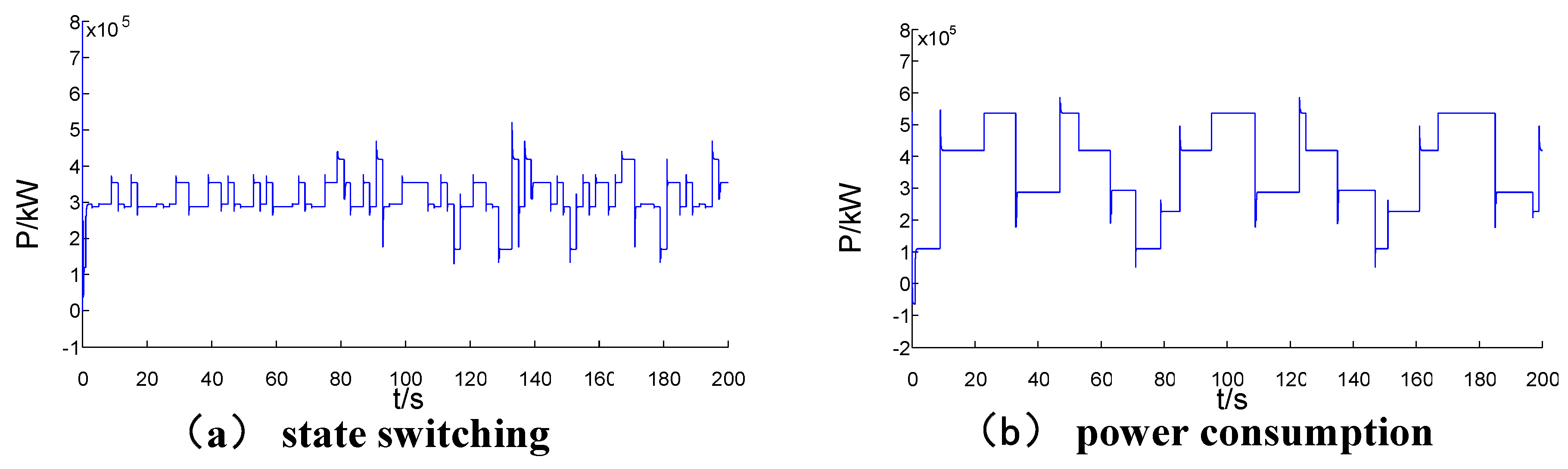
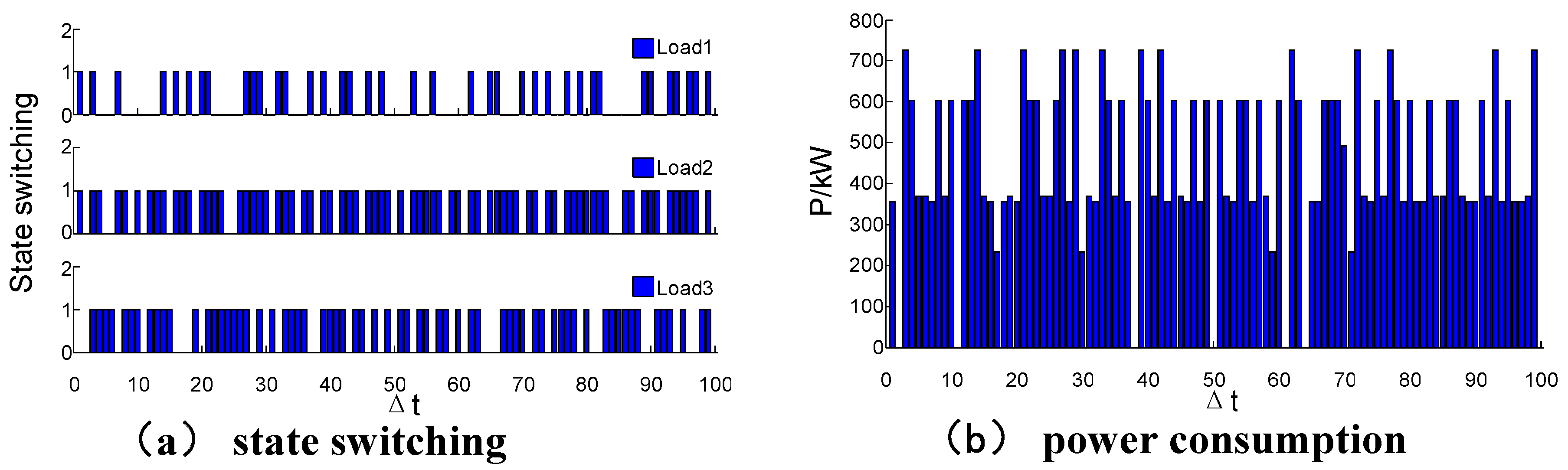
Figure 15 shows the state switching and total power of distributed control. From
Figure 15b, the three loads’ total consumption is able to be kept near 356 kW. But compared with
Figure 9a, a sharp power change occurs in the distributed mode, and the curve is more unstable. This is caused by inaccurate coupling information between controllers. So, the optimal performance of the distributed mode is worse.
The detailed comparison of total consumption and calculation performance between the two modes is listed in
Table 7. Though there is a loss of optimal performance, the speed of distributed control is promoted.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}