1. Introduction
Electric vehicles (EVs) have attracted increasing attention all over the world due to the serious concerns of the energy crisis and air pollution [
1,
2,
3]. Generally, EVs can be classified into three types, namely, battery electric vehicles (BEVs), hybrid electric vehicles (HEVs), and fuel cell electric vehicles (FCEVs) [
4,
5]. Compared with FCEVs, BEVs have the advantages of relatively low cost and mature technology. Moreover, unlike HEVs, BEVs can achieve zero emissions. Therefore, vigorously developing BEVs is considered the best solution to promote electric transportation at this time. Especially in China, the central government has identified BEVs as one of the most promising directions for the automotive industry.
Traditionally, a BEV has a relatively simple architecture which mainly consists of one electric machine (EM), one transmission, and battery packs. The EM obtaining the energy from the battery propels the BEV through the transmission. However, there still exist the following shortcomings in the traditional BEVs: (1) Since the BEV is driven by the EM alone and it is also required to work in a wide range of velocities [
6], it is bound to increase the maximum power and speed of the EM when we design or choose the EM, which will create difficulties in the design of the BEV; (2) it is rather obvious that there is only one power flow path. As far as regenerative braking is concerned, the instantaneous power from braking may cause potential damage to the batteries and reduce the battery life. In order to solve the problem in the energy feedback, researchers have put forward hybrid energy storage systems, such as the flywheel hybrid energy storage system [
7,
8] and the ultra-capacitor hybrid energy storage system [
9,
10]. Although the engagement of flywheels or ultra-capacitors will make the structure of BEVs more complex, they are very effective.
In HEVs, in order to improve fuel economy and reduce emission, the powertrain system with a power-split are widely adopted [
11,
12,
13]. In addition, one famous powertrain system is the Toyota Prius, which consists of two EMs and a single planetary gear. By controlling the speeds and torques of the two EMs, the Toyota Prius system can achieve multi-path power flows to make the internal-combustion engine (ICE) operate in a highly efficient way [
14]. Based on the Toyota Prius system, reference [
15] has designed and analyzed a powertrain system with a coaxial magnetic gear (CMG). The novelty of the system is that the coaxial magnetic gear replaces the planetary gear in the Toyota Prius system, which can eliminate the nuisance of gears, such as noise, vibration, maintenance, and so on. Put simply, the powertrain system using a planetary gear or CMG integrated with two EMs is effective at achieving multi-path power flows in HEVs.
Inspired by the system supporting multi-path power flows in HEVs and flywheel energy storage systems in EVs, this paper aims to propose a novel electric vehicle powertrain system in order to solve the above mentioned problems in traditional BEVs. It is mainly composed of a CMG [
16,
17], an electromagnetic clutch, a lock, and two EMs. In addition, the CMG integrates one of the EMs, which makes the configuration more compact [
18]. From a functional point of view, the system possesses the following characteristics: (1) It can be propelled by the two EMs simultaneously, one is the main drive motor, and the other is the auxiliary drive motor with high speed, so the required driving power can be shared by the two EMs. For the main drive motor, the required operating speed range becomes much narrower, and this is conducive to motor design; (2) The auxiliary drive motor can also work as a flywheel storage device when necessary, which is capable of buffering the energy from regenerative braking, so as to protect the battery; (3) The system integrates a CMG for power-split. Compared with the mechanical gears, the CMG is a magnetic transmission device which can achieve non-contact torque transmission and speed variation [
19]. It has several advantages, such as reducing noise and vibration, being maintenance free, having overload protection, etc. [
20,
21]; (4) By controlling the states of the clutch and the lock, the CMG enables the powertrain system to work in four operation modes and fulfill multi-path power flows. The main contribution of this paper is to propose a novel powertrain system supporting multi-path power flows for BEVs to protect the battery when braking with high instantaneous power and to determine the parameters of the proposed powertrain system.
The paper is organized as follows: In
Section 2, the detailed configuration of the powertrain system is depicted and the operation modes are elaborated. In
Section 3, a dynamic model of the powertrain system is established. Then, the parameters of the powertrain system are determined in
Section 4. Next,
Section 5 is devoted to the verification of operation modes in
Section 2 and the rationality of the parameters in
Section 4. Finally, conclusions are drawn in
Section 6.
2. Powertrain Description
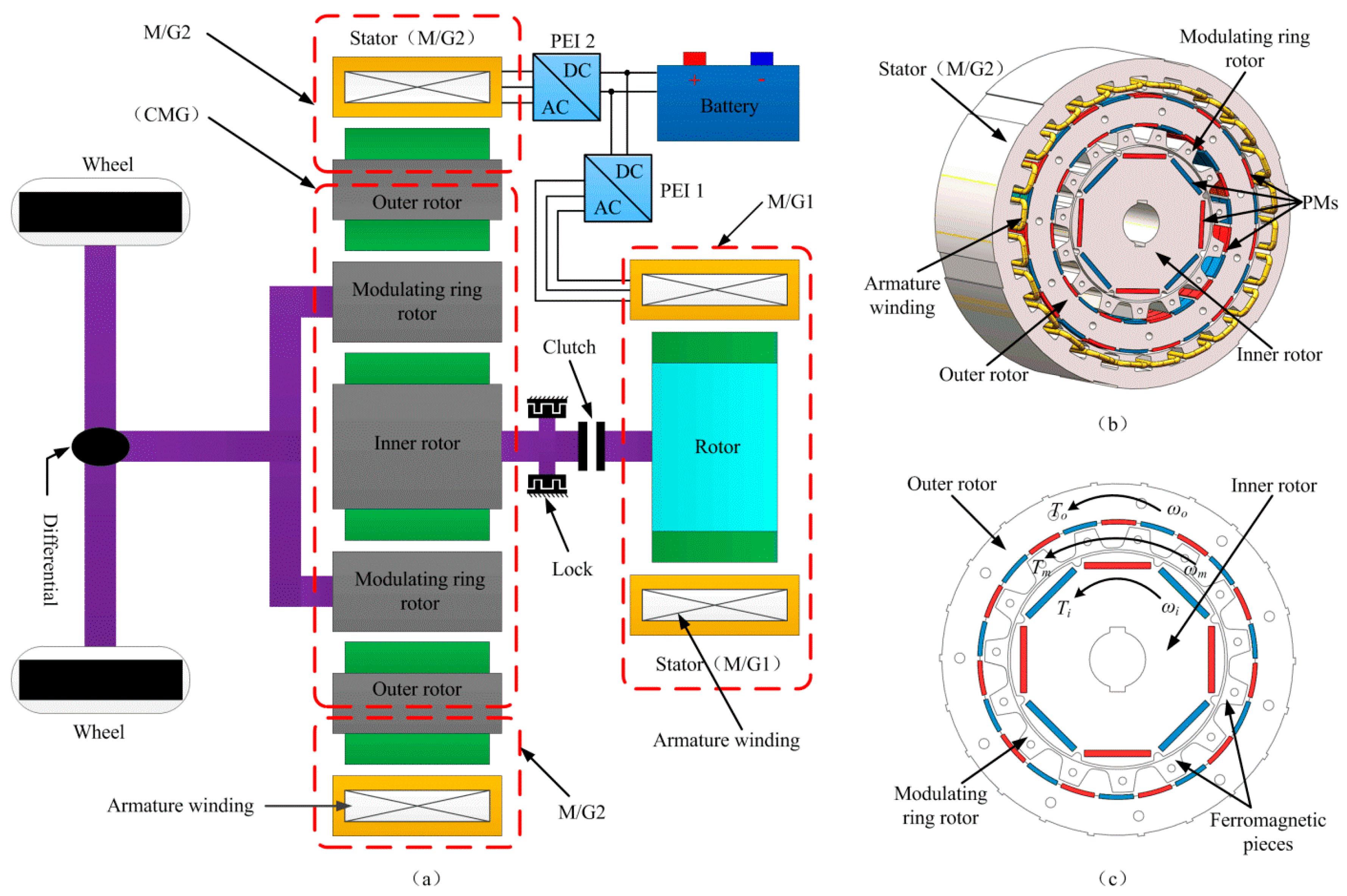
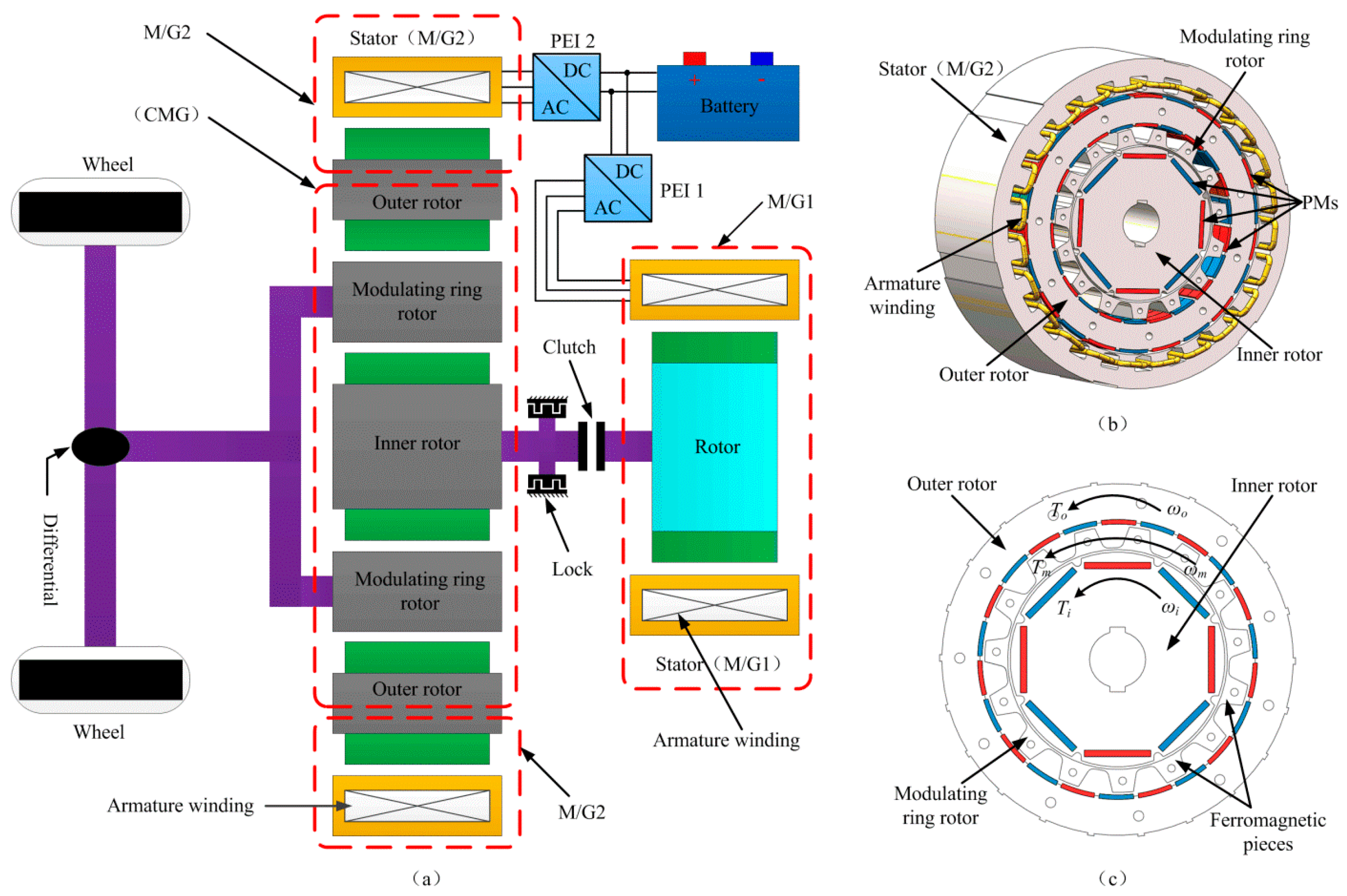
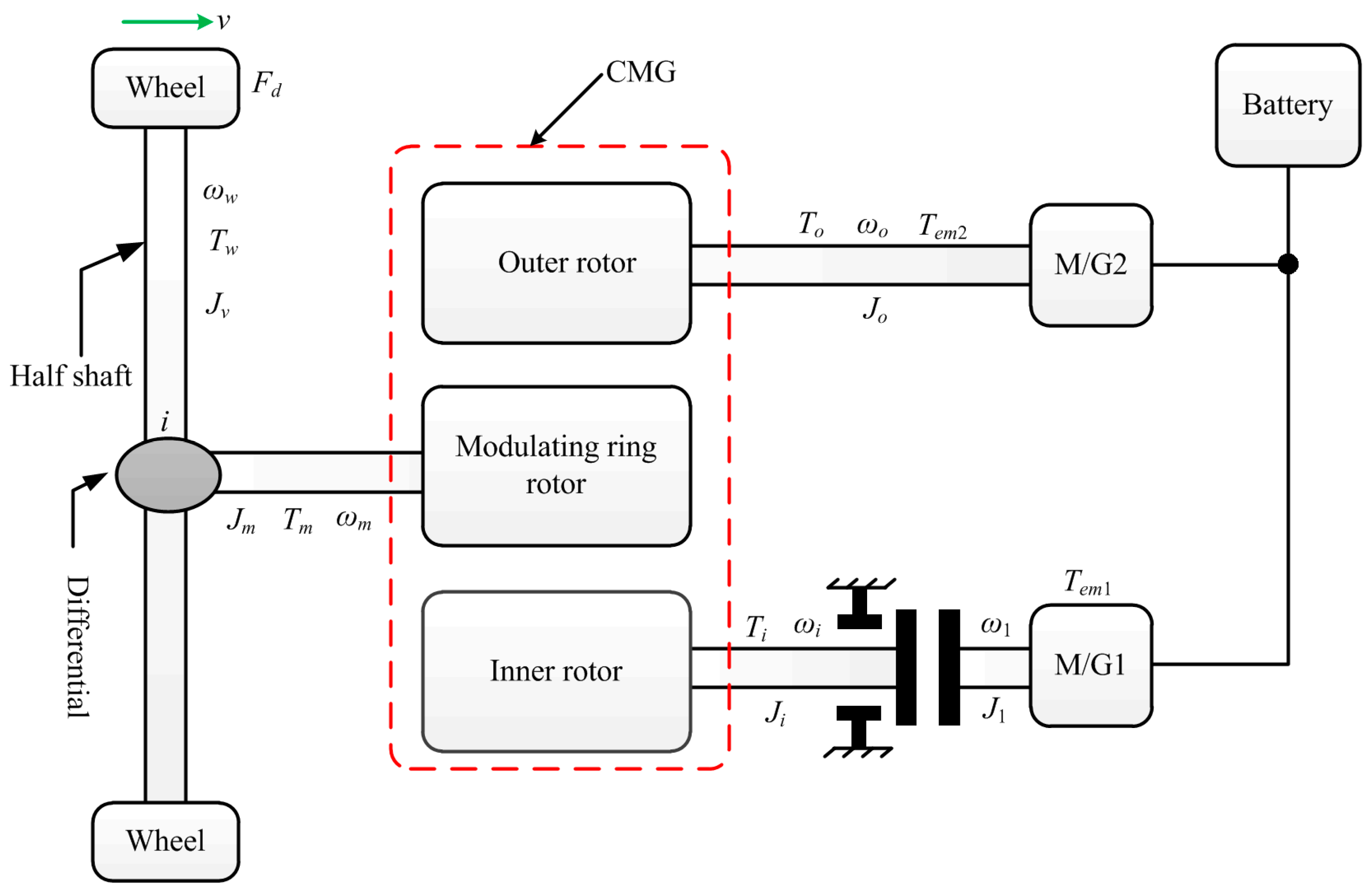
Figure 1a depicts the configuration of the proposed powertrain system. It mainly consists of a coaxial magnetic gear (CMG), two EMs (M/G1 and M/G2), two power electronic inverters (PEI 1 and PEI 2), an electromagnetic clutch, a lock, and battery packs. The CMG is the key component in the powertrain system, which plays the role of coupling multiple shafts to implement a power-split. The CMG and the M/G2 constitute an integrated magnetic gear permanent magnet (IMG-PM) machine, as shown in
Figure 1b. The IMG-PM machine is characterized by the rotor of M/G2 and the outer rotor of CMG sharing a rotor, and permanent magnets (PMs) are installed on both sides of the rotor. The modulating ring rotor is rigidly connected to the final driveline, which transmits the force/torque to the wheels via differential and shafts. The inner rotor is connected to the rotor of M/G1 through an electromagnetic clutch and a shaft, and a lock is mounted on the shaft. The stator windings of M/G1 and M/G2 are connected to the battery through PEI 1 and PEI 2, respectively.
Figure 1c shows the topology of the CMG. It can be seen that the CMG is composed of three rotational components, namely, inner rotor, outer rotor, and modulating ring rotor. There are some PMs on both the inner rotor and outer rotor, and the pole-pair numbers (PPNs) of inner rotor and outer rotor are
and
, respectively. The modulating ring rotor consists of a certain number of ferromagnetic pieces, the numbers of which are
. In order to ensure the normal operation of the CMG,
is governed by the sum of
and
[
22,
23].
As shown in
Figure 1c, the positive direction of the torque and the rotational speed is specified in the counterclockwise direction. The values
,
, and
are the permanent magnetic torques provided by the inner rotor, the outer rotor, and the modulating ring rotor, respectively. The values
,
, and
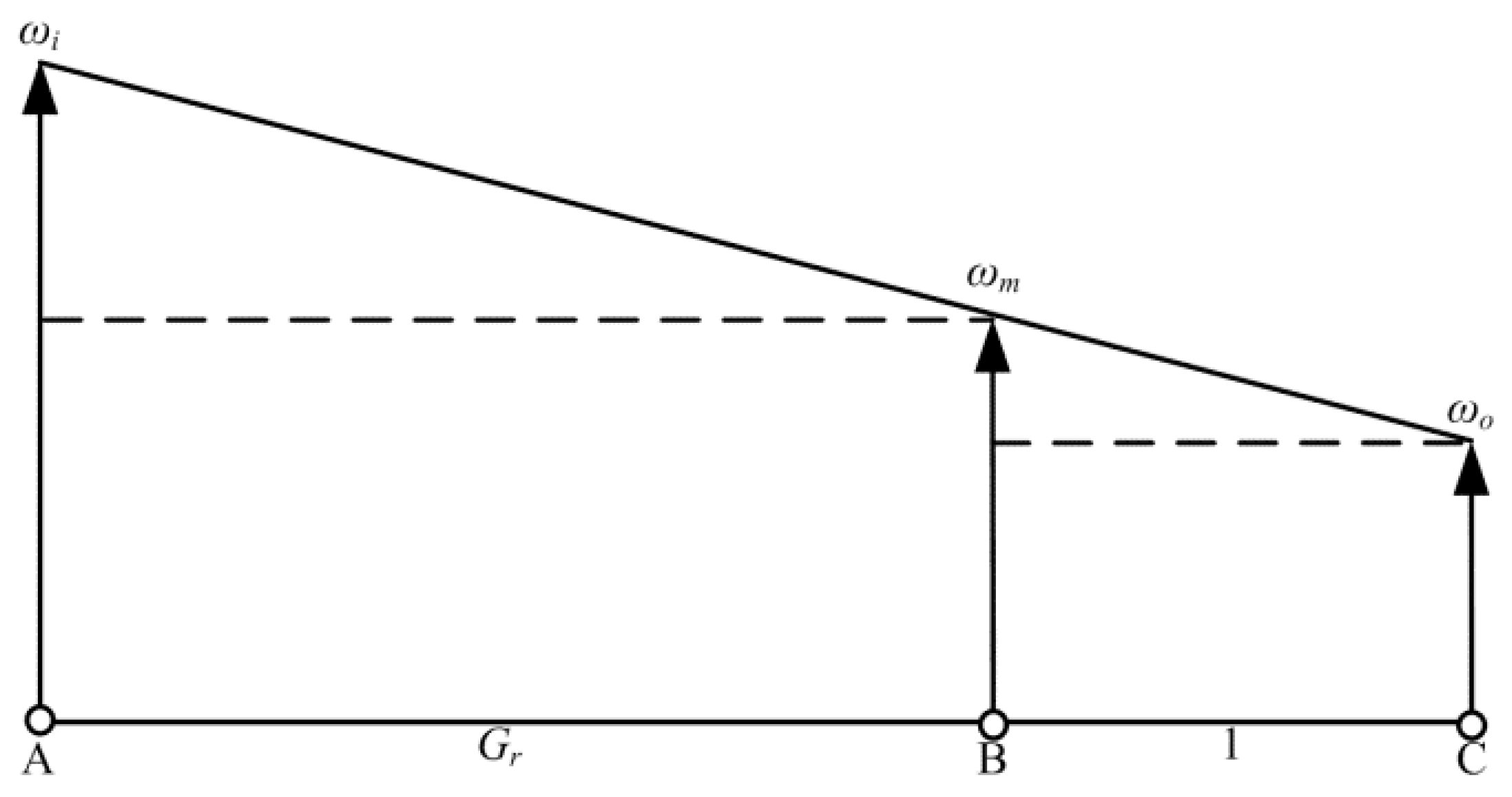
correspond to the rotational speeds of the inner rotor, the outer rotor, and the modulating ring rotor, respectively. The corresponding speed relationship is governed by [
15]:
where
is the so-called gear ratio.
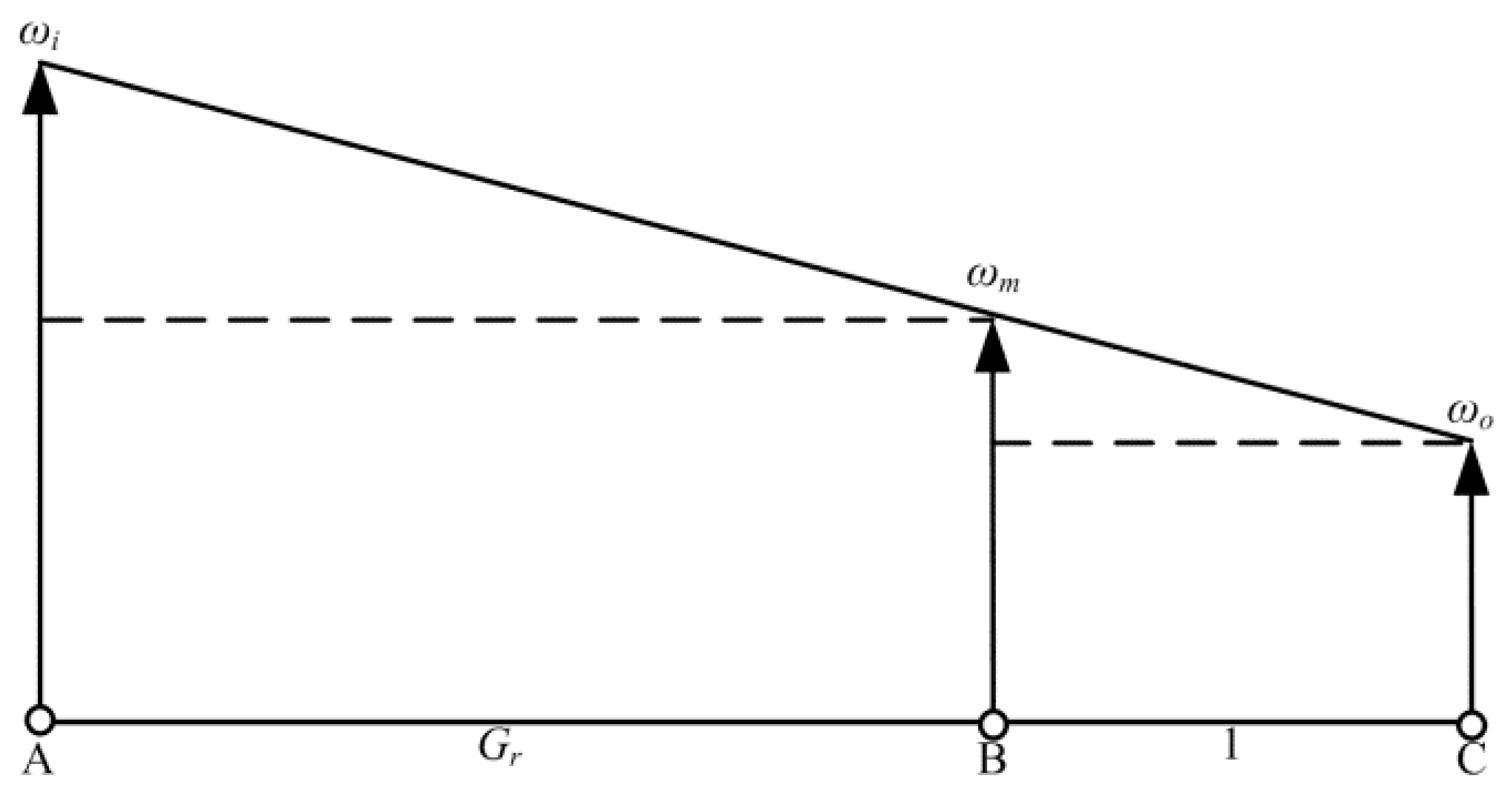
Figure 2 shows the collinear speed map [
24], which is utilized to analyze the change relationship of rotational speeds in Equation (1).
With the CMG under steady-state conditions and without considering the power losses in CMG, it yields [
15]:
It can be obtained from Equations (1) to (3) that the torque constraint relationships are as follows:
It can be found from Equations (4) and (5) that the direction of and are always the same, while the direction of them is opposite to that of . Moreover, the torques transmitted by CMG are allocated strictly as per the proportion in Equations (4) and (5).
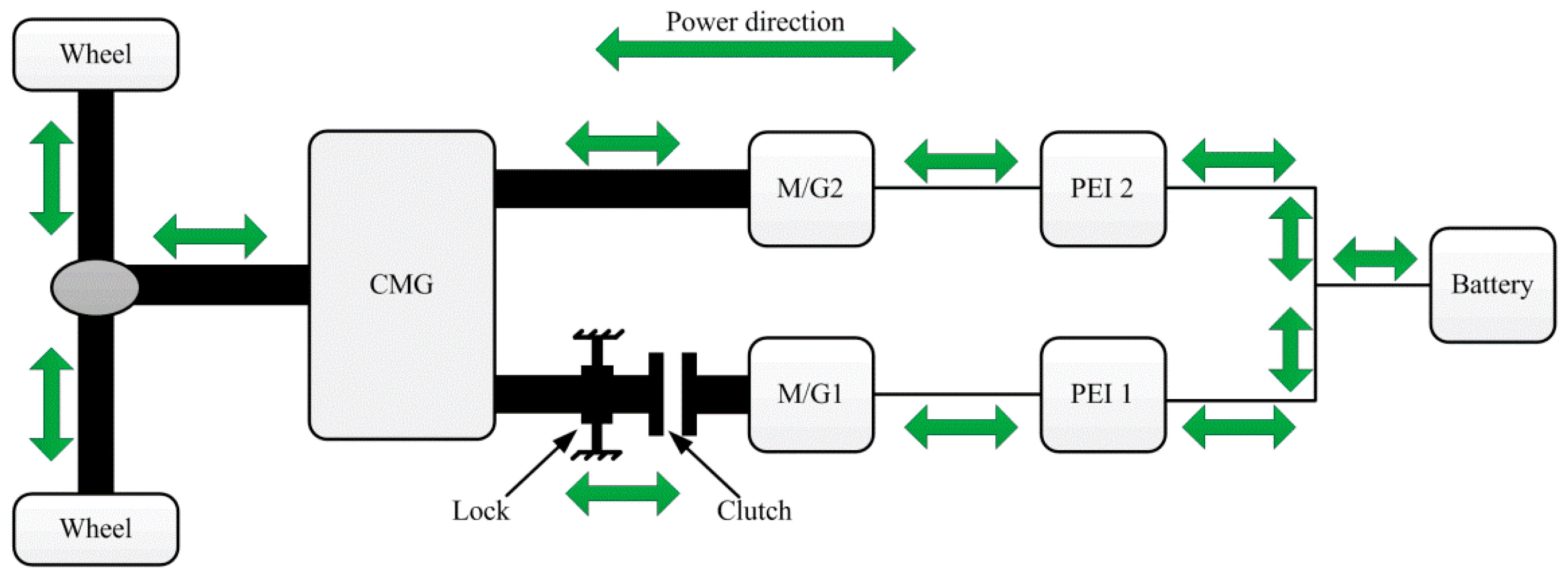
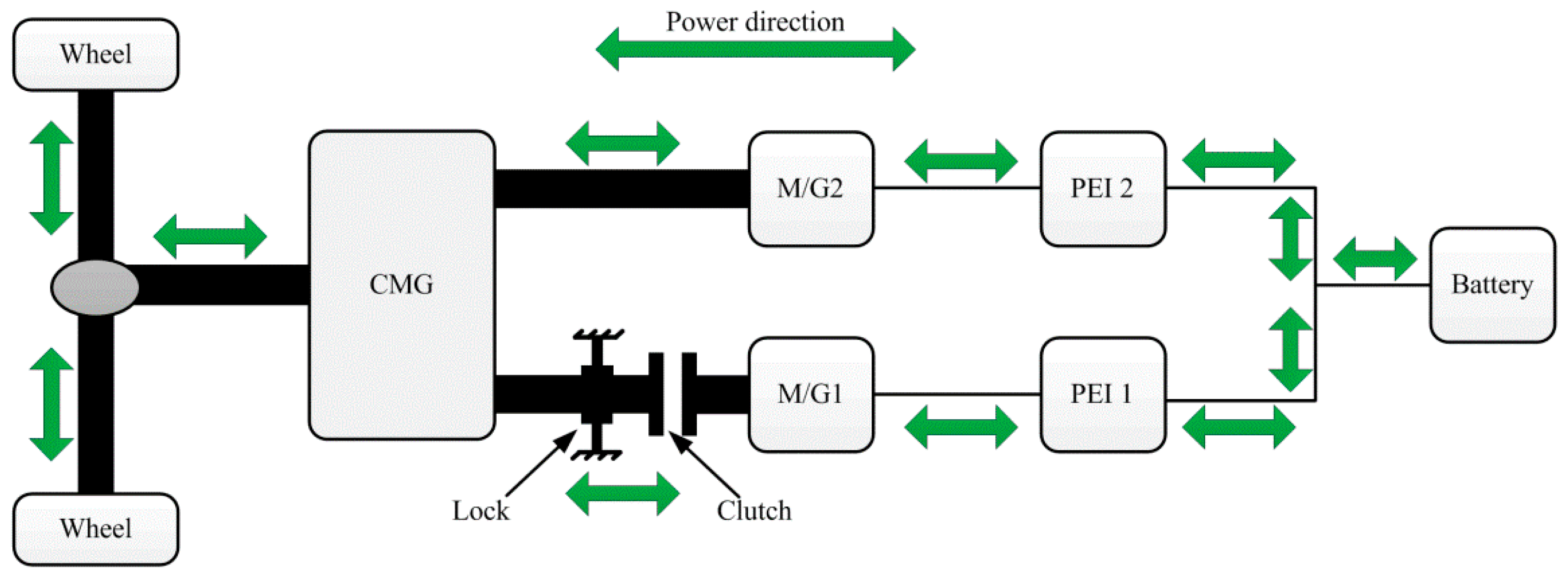
Figure 3 illustrates the power flow paths in the powertrain system. It can be observed that there are diverse power flow paths in the powertrain system and the power in all paths can flow bidirectionally. By switching the states of the M/Gs, controlling the lock and toggling the clutch, the powertrain system can achieve the following operation modes:
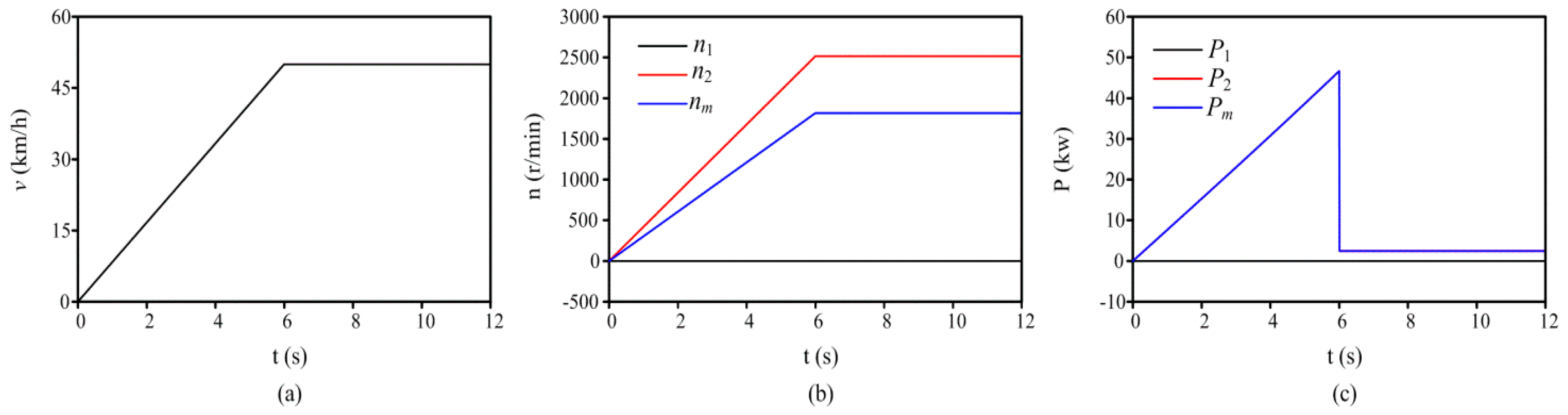
Mode 1 (M/G2 driving alone): It means that the powertrain system is driven only by M/G2. When the lock is engaged (locks the inner rotor of CMG), the clutch is disengaged (disconnecting the CMG from M/G1) and M/G1 remains de-energized; the M/G2 works as a motor to deliver its power to the wheels through the CMG and final driveline. In this operation mode, the power flow path is like this: battery → PEI 2 → M/G2 → outer rotor of CMG → modulating ring rotor of CMG → final driveline → wheels.
Mode 2 (Regenerative braking after M/G2 driving alone): This operation mode refers to the time after the M/G2 driving alone mode when the powertrain system needs to brake. At this time, M/G2 is functioning as a generator and M/G2 accepts braking power through the final driveline and CMG. The electric energy from regenerative braking can be either fully used to charge the battery or can be fully used to drive M/G1 which means the electric energy is converted into mechanical energy stored in the rotor of M/G1. In this case, M/G1 can be regarded as a flywheel storage device or can be partly transmitted to battery and partly converted into the mechanical energy of M/G1 by PEI 1.
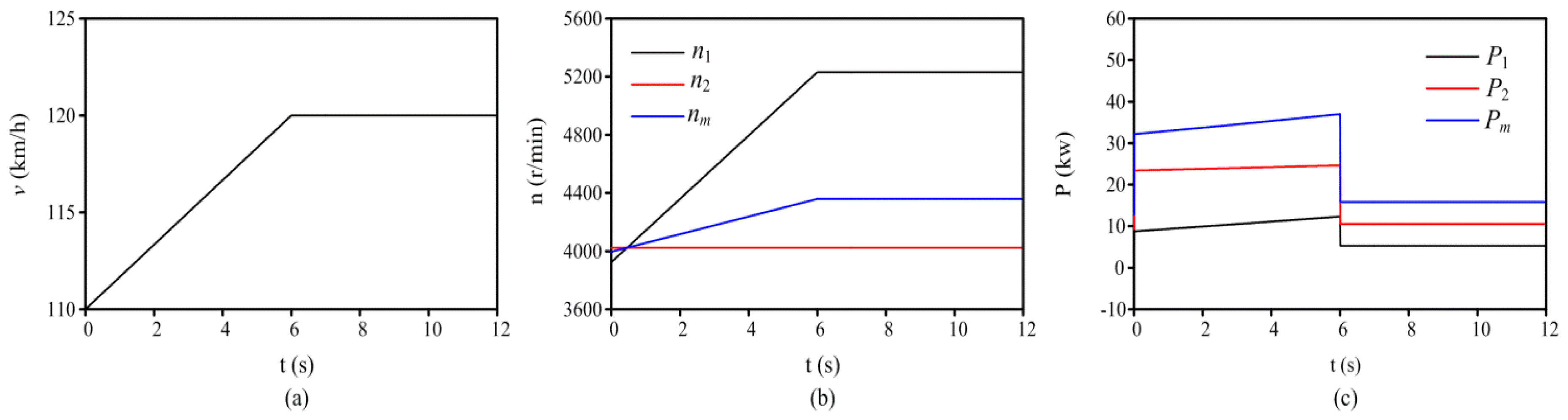
Mode 3 (M/G1 and M/G2 driving): In this mode, both M/G1 and M/G2 drive the powertrain system. When the lock is released (the inner rotor of CMG can rotate freely) and the clutch is engaged (connecting M/G1 to CMG), both M/G1 and M/G2 work as motors to deliver the power to the wheels through the CMG and final driveline. In this case, the power from the battery can be finally transformed into mechanical energy by the PEI 1, PEI 2, M/G1, M/G2, and CMG.
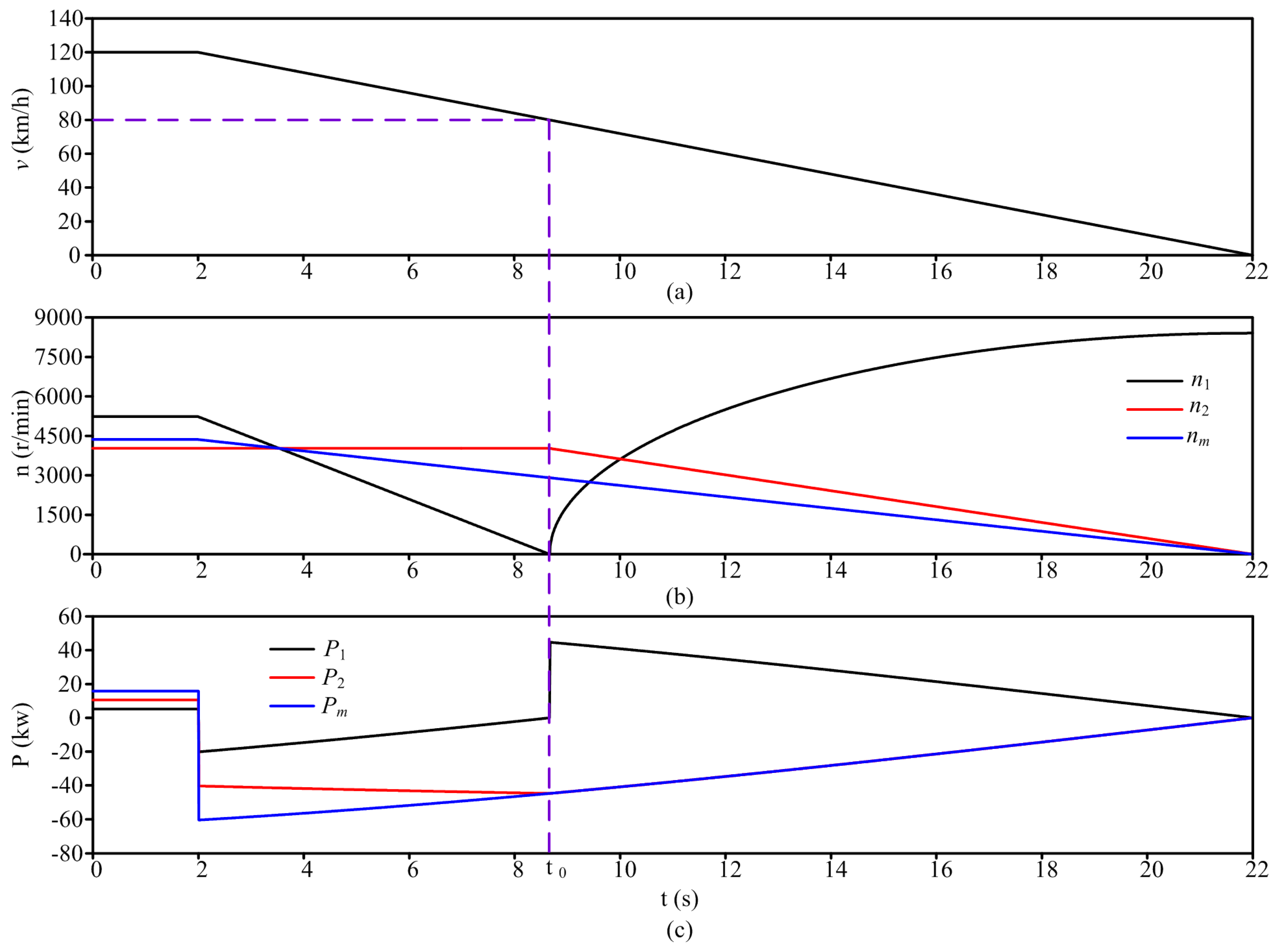
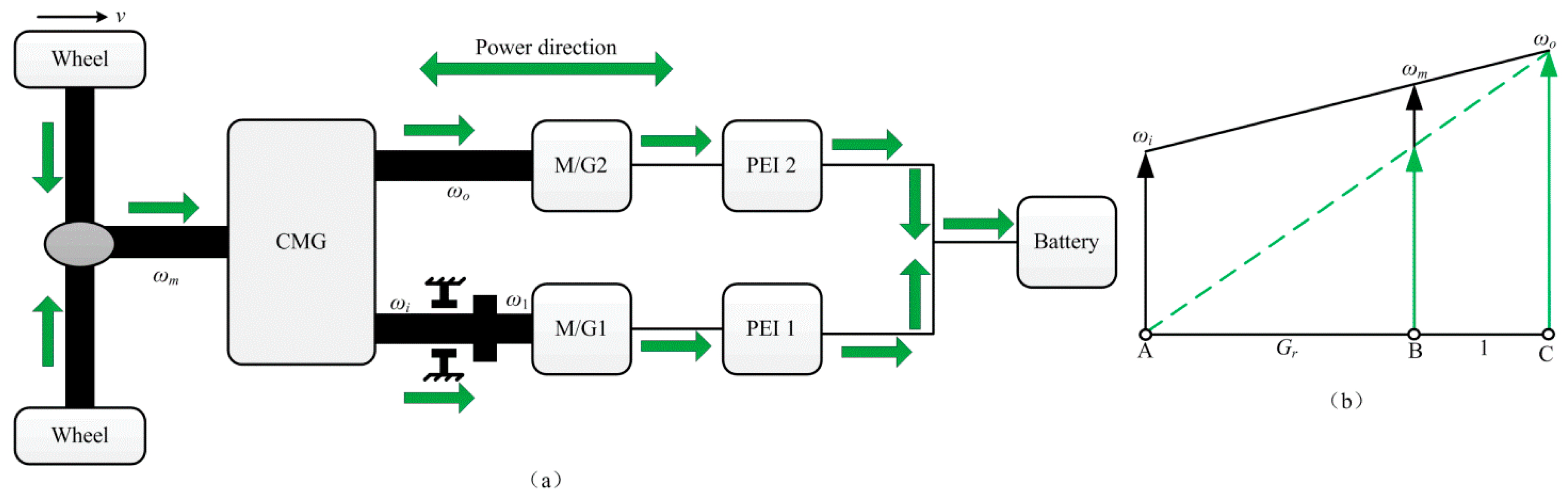
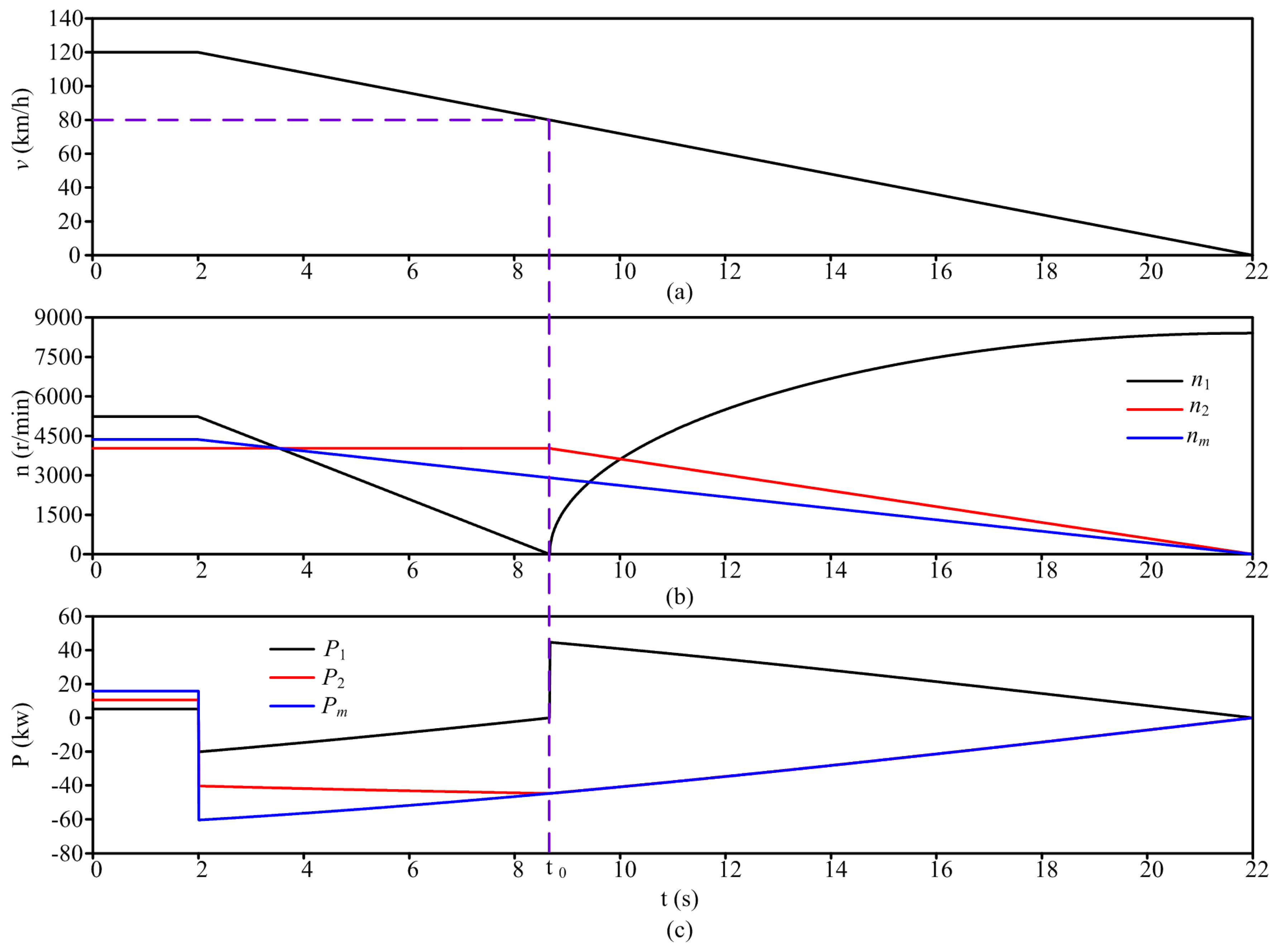
Mode 4 (Regenerative braking after M/G1 and M/G2 driving): This mode refers to the time after the M/G1 and M/G2 driving mode when the powertrain system needs to brake. It can be seen from
Figure 4a that the vehicle velocity (
) corresponds to that of the modulating ring rotor of CMG; when
slows down,
also decreases. In
Figure 4a,
is the speed of M/G1. Because M/G1 and the inner rotor of the CMG have the same rotational speed (
), to achieve this operation mode, first, keep the rotational speed of M/G2 (
) unchanged so that M/G1 operates as a generator to reduce the speed of M/G1 (
) and the inner rotor of CMG to zero. When
and
are equal to zero, the clutch will be disengaged and the lock will be engaged. In this process, when
and
are reduced to zero,
is not equal to zero, as shown in
Figure 4b. After that, if the powertrain system continues to brake, the way to achieve regenerative braking is the same as Mode 2. It is necessary to point out that: (A) throughout the whole process, M/G2 operates as a generator, while M/G1 works as a generator before
and
are equal to zero. After the lock is engaged and the clutch is disengaged, M/G1 may be de-energized or may be functions as a motor; (B) in terms of the power flow paths, before
and
are equal to zero, all the regenerative braking energy is converted into electric energy stored in the battery by M/G1 and M/G2, while after the lock is engaged and the clutch is disengaged, the regenerative braking energy is only converted into electric energy by M/G2, and then, the electric energy can be either fully used to charge the battery, or can be fully converted into mechanical energy of M/G1 by PEI 1, or can be partly transmitted to battery and partly converted into mechanical energy of M/G1 by PEI 1.
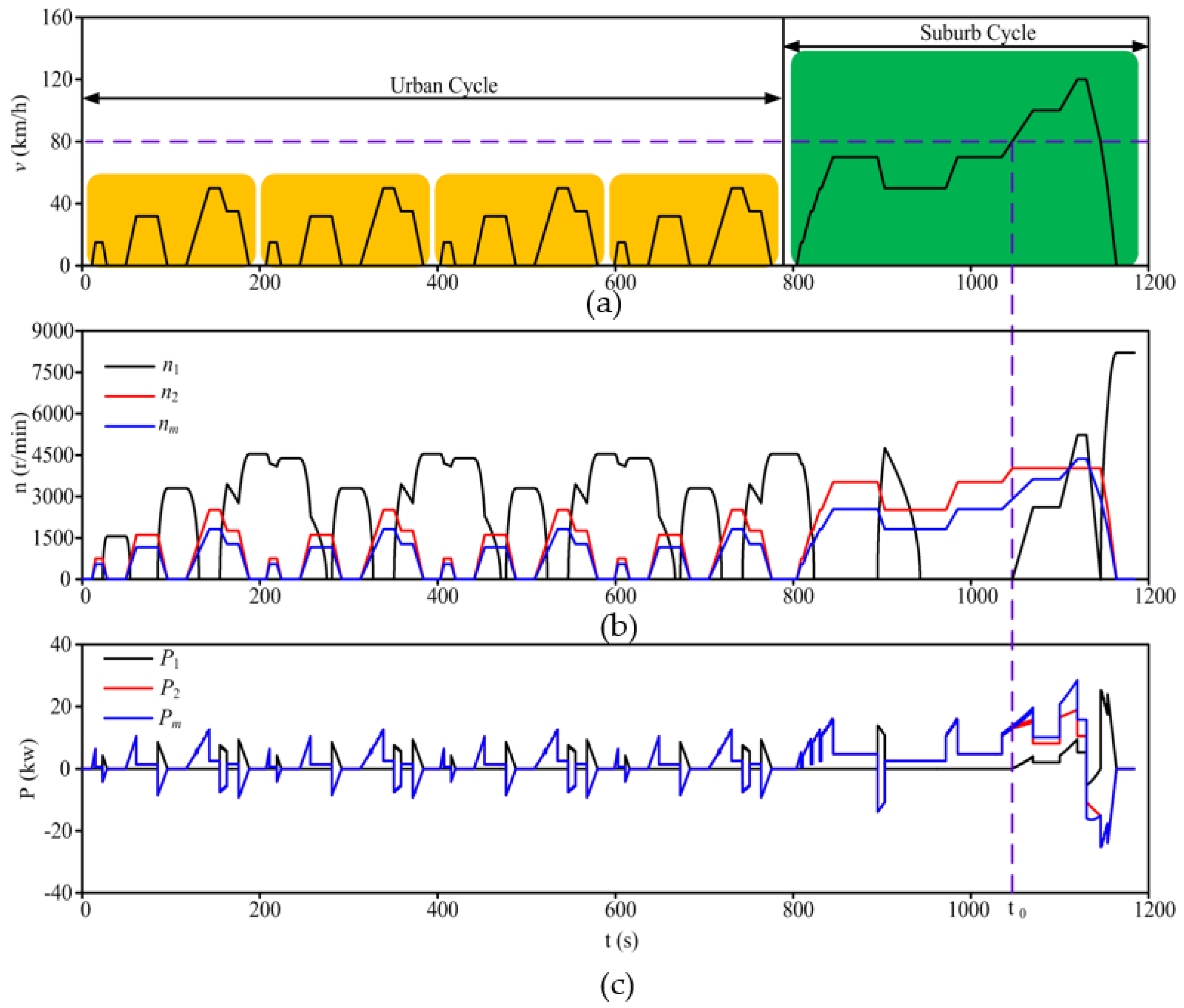
In real operation, how to select the above operation modes mainly depends on the driving cycle and the control strategy.
3. Dynamic Model
The vehicle road load (
) is mainly composed of the rolling resistance (
), the aerodynamic drag force (
), and climbing force (
). These forces can be expressed as follows [
25]:
where
is the rolling resistance coefficient,
is the vehicle mass,
is the gravitational acceleration,
is the road slope angle,
is the air density,
is the aerodynamic drag coefficient, and
is the vehicle frontal area.
The vehicle motion equation can be expressed as:
where
is the motive force acting on the wheels and
is a mass correction factor to compensate for the apparent increase in the vehicle’s mass due to the inertia of the onboard rotating mass.
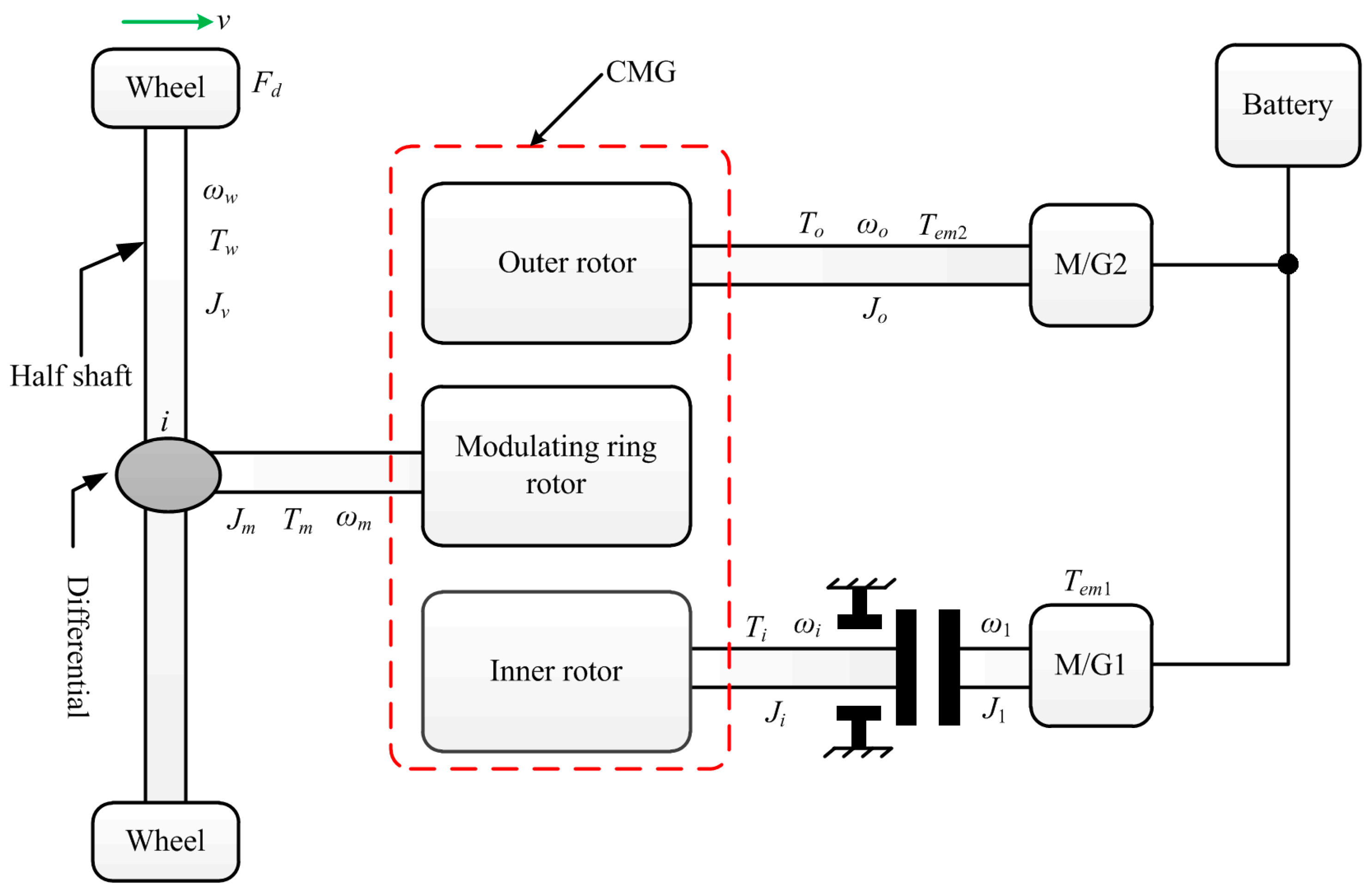
In order to facilitate system modeling,
Figure 5 gives a simplified diagram of the powertrain system, in which the relevant parameters of each component are indicated. The required torque of half shaft (
) is given by:
where
is tire radius and the relationship between the rotational speed of the half shaft and the vehicle velocity is:
For the modulating ring rotor of the CMG, its motion equation can be expressed as:
where
is reduction ratio and
;
, and
are the moments of inertia of the differential and the half shaft and the modulating ring rotor of CMG, respectively.
For the outer rotor of the CMG, its motion equation can be expressed as:
where
is the moment of inertia of the outer rotor of the CMG and
is the electromagnetic torque provided by the M/G2.
For the inner rotor of CMG and M/G1, their motion equations have a close relationship with the states of the lock and the clutch. Since both lock and clutch have two states, there exist four cases in theory. However, taking into account the previous analysis of the four operation modes, the motion equations only contain the following two cases:
Case 1: the lock is disengaged and the clutch is engaged, the motion equation can be expressed as:
where
and
are the moments of inertia of M/G1 and the inner rotor of CMG, respectively, and
is the electromagnetic torque provided by the M/G1. It should be noted that in this case,
is equal to
.
Case 2: the lock is engaged and the clutch is disengaged, the motion equation can be expressed as:
It should be noted that in this case,
is equal to zero.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}