
An Overview of Indoor Localization System for Human Activity Recognition (HAR) in Healthcare




Abstract
1. Introduction
- The sensing module continuously collects information through sensors on the activities carried out.
- The processing and selection module extracts features that help discriminate between activities.
- The classification module uses the features to identify the individual’s activity.
- Know in real-time how people move within a structure.
- Identify where a particular subject is.
- Activate alarms when particular situations are identified.
- Support security and emergency services to direct them where their intervention is needed.
- Track personnel at risk when they reach designated collection points in the event of an evacuation.
- The presence of obstacles weakens the signal (fast fading);
- The presence of obstacles creates the problem of signals not being in a direct line (not line of sight (NLOS));
- The structure and nature of the construction materials of the indoor environment may create the problem of reflection and refraction (multipathing), making it difficult to determine the correct origin of the signal;
- The climatic changes in the signal’s means of transport affect the propagation speed.
- The space segment consists of a constellation of satellites.
- The control segment comprises ground stations with the task of synchronizing the clocks of all the satellites, knowing their position, and possibly correcting them.
- The user segment comprises an antenna capable of acquiring signals and a receiver capable of decoding and processing them.
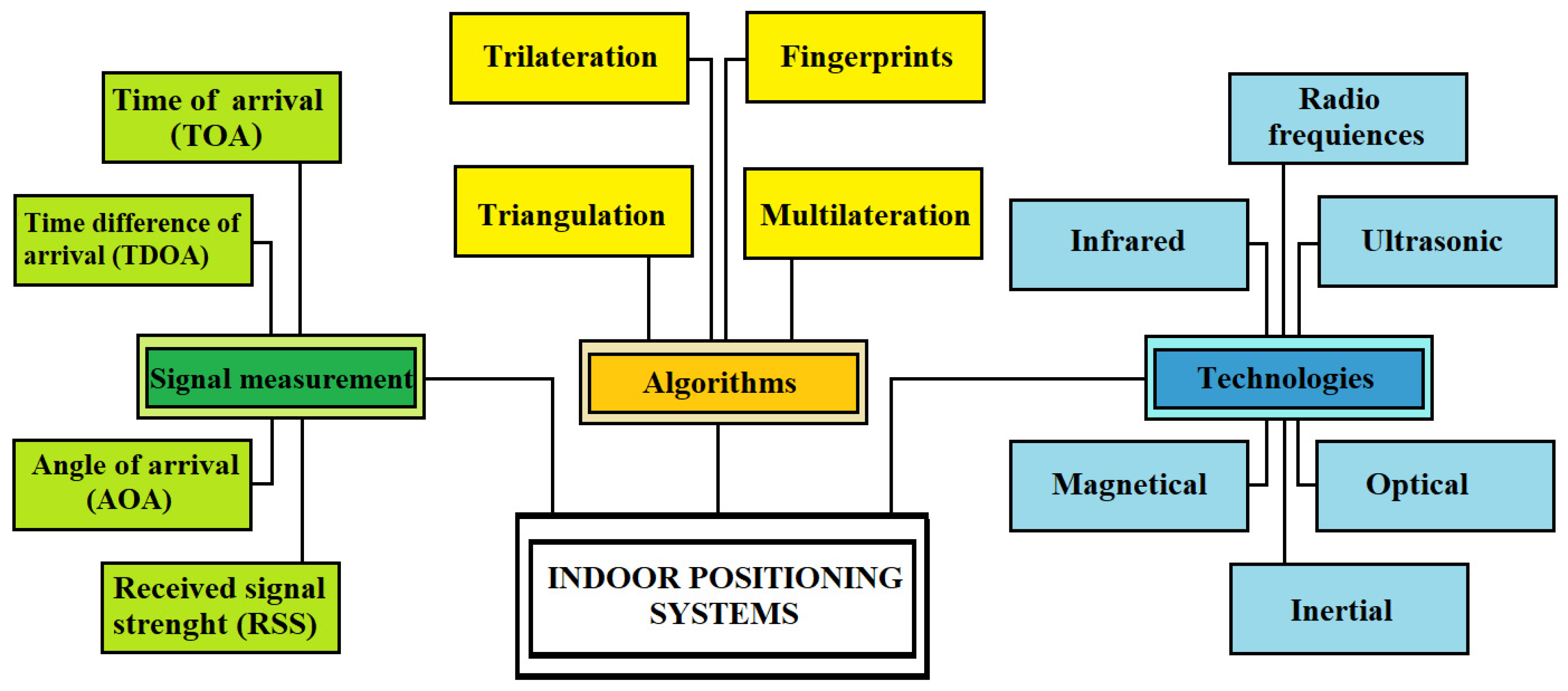
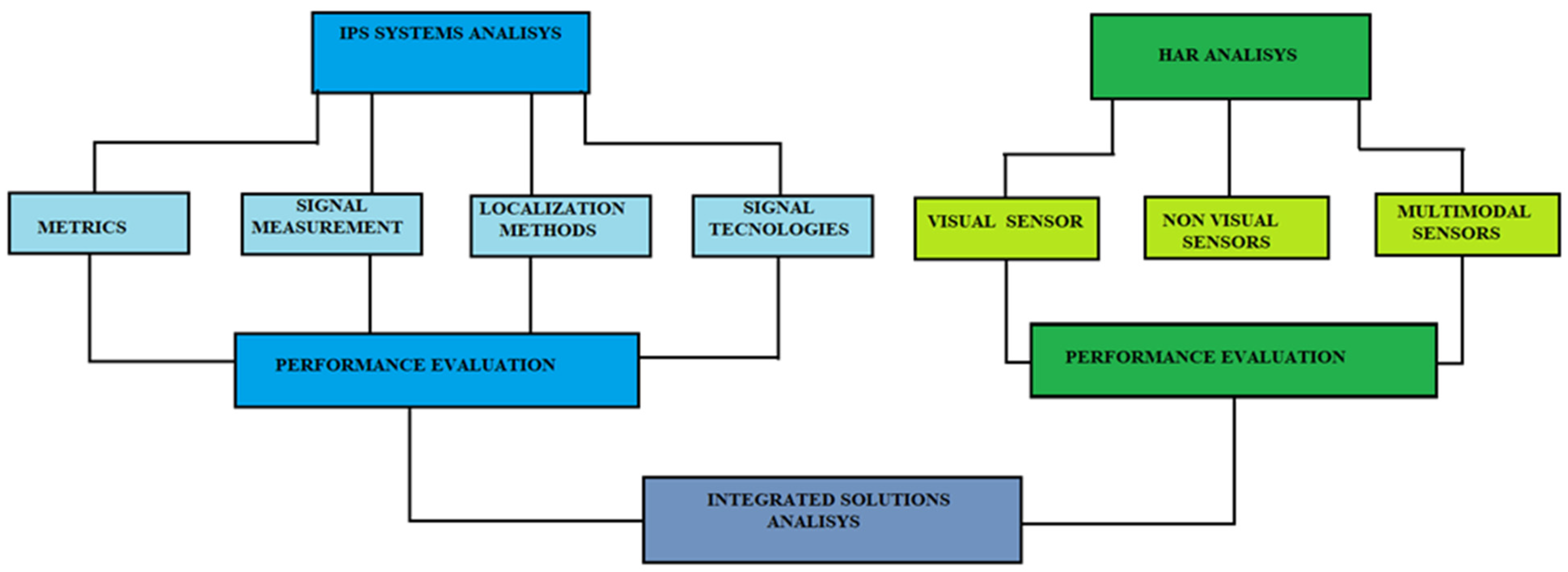
2. IPS
Evaluation Metrics
- Accuracy is the main feature that evaluates the average difference between the detected and actual positions (ground truth) [19]. Generally, this value is not fixed but oscillates concerning various parameters; thus, the reference is made to minimum and maximum values. Depending on the technology used, we can have the values in meters reported in Table 1.
- Coverage indicates the functional surface within which the examined technology is effective. Depending on the type of technology used, it takes on different values. IPS coverage usually ranges from a few meters to scalable systems that can cover multiple large environments by adding hardware. In the case of challenging-to-scale technologies, this value represents the maximum local area covered, while, in the application of techniques that can scale (increasing their level of coverage), it represents the distance or area that can be covered by a single cell. Generally, technologies with more excellent coverage typically imply lower accuracy. In Table 1, the values of coverage are reported in meters.
- Scalability indicates the possibility with which the technology can be extended, referring both to the coverage area and to the number of users supported simultaneously [20].
- Security and privacy represent the level of control of access to the subjects’ personal information.
- Cost includes all the costs necessary for the implementation and operation of the system, such as infrastructure costs, installation and maintenance, and energy consumption to run the components. The latter represents a fundamental parameter to ensure system continuity and higher mobility [21].
- Complexity represents the level of complexity of designing, constructing, and maintaining an IPS.
- Support/infrastructure represents the hardware necessary for the system to operate, i.e., if specific equipment is needed, or it can refer to the integration of an infrastructure located in the localization area, such as sensors or transmitters. The density and cost of these additional infrastructures weigh on the expansion capacity of the technology if it is necessary to use more nodes of the infrastructure.
- Continuity indicates the property of continuous operation of an IPS over an appropriate time to perform its specific function, including acceptable outage frequency.
- Usability/user acceptance represents how convenient and usable the technology is to the end user. A simpler infrastructure is easier to use.
- Privacy is a crucial aspect to keep in mind that is not always carefully evaluated in IPS systems. Security mechanisms should be in place to improve user privacy, protecting data from intrusion or misuse [22].
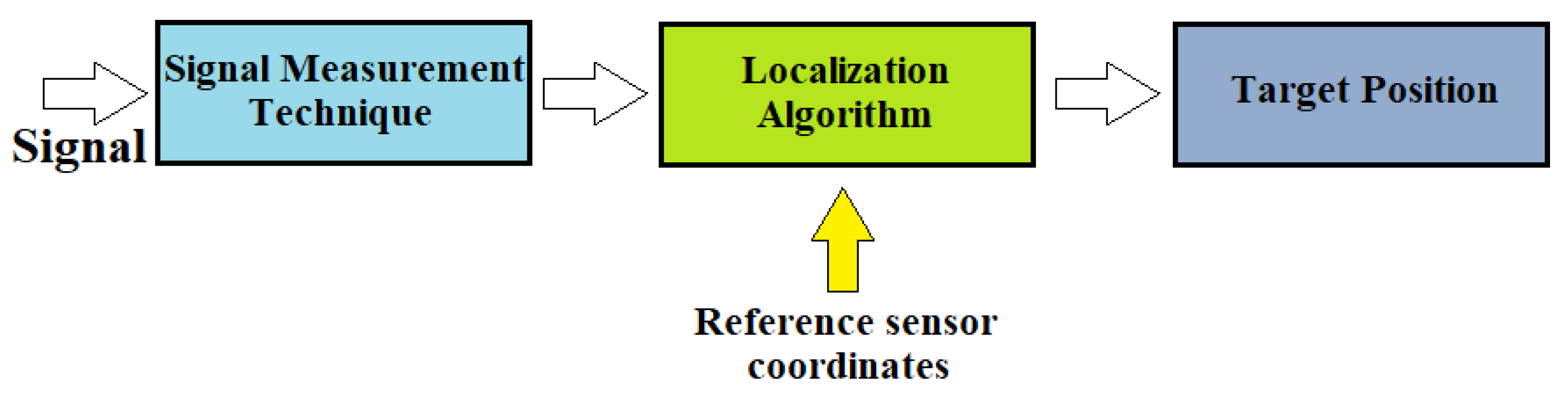
3. Signal Measurement Techniques
3.1. Time-Based Methods
3.1.1. Time of Arrival (TOA)
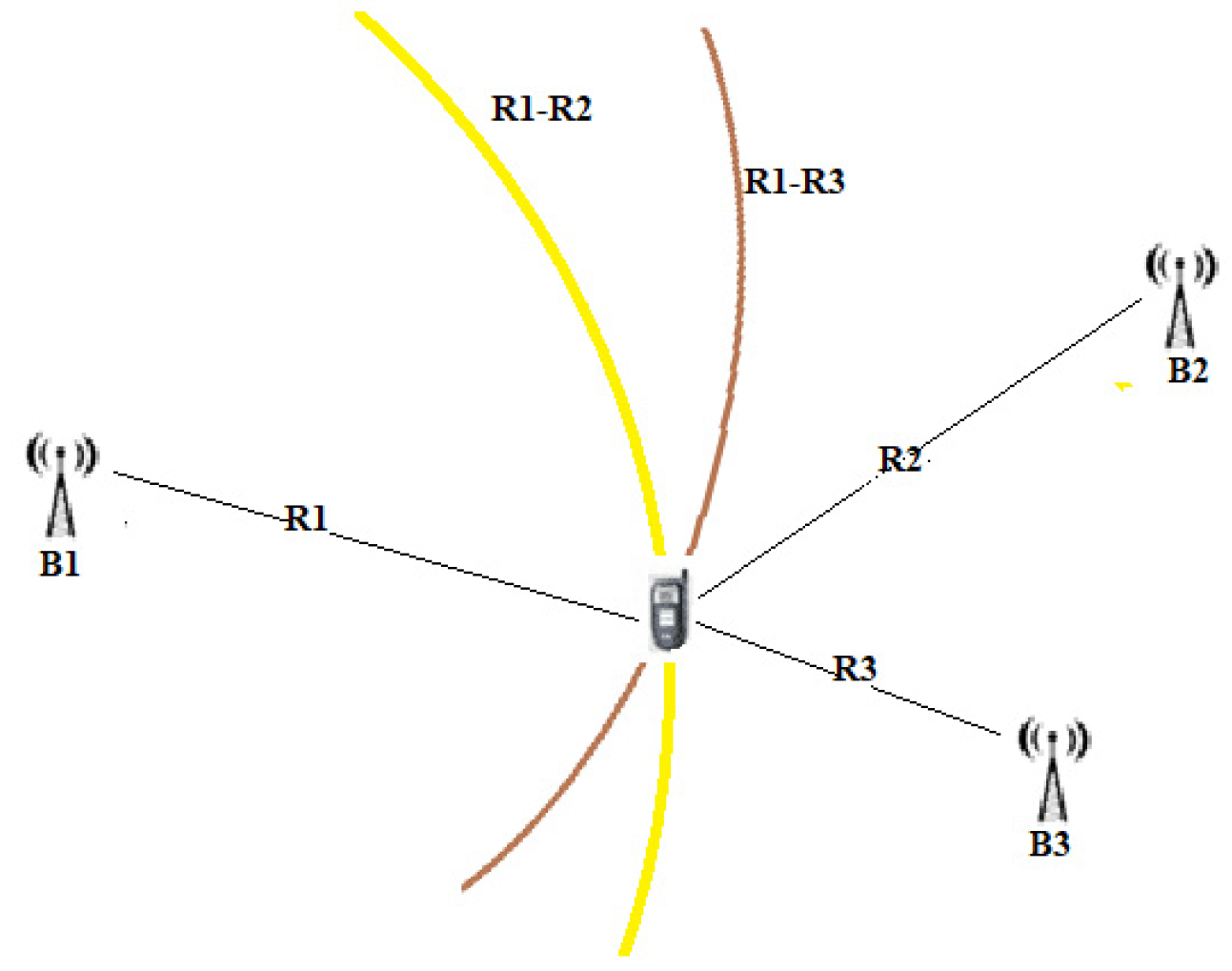
3.1.2. Time Difference of Arrival (TDOA)
3.1.3. Round Trip Time (RTT)
- Propagation delay, which depends on the distance between the transmitter and the receiver;
- Processing delay that depends on the number of nodes on the network. A node can also experience congestion by slowing the connection and increasing the RTT.
3.2. Receiving Angle
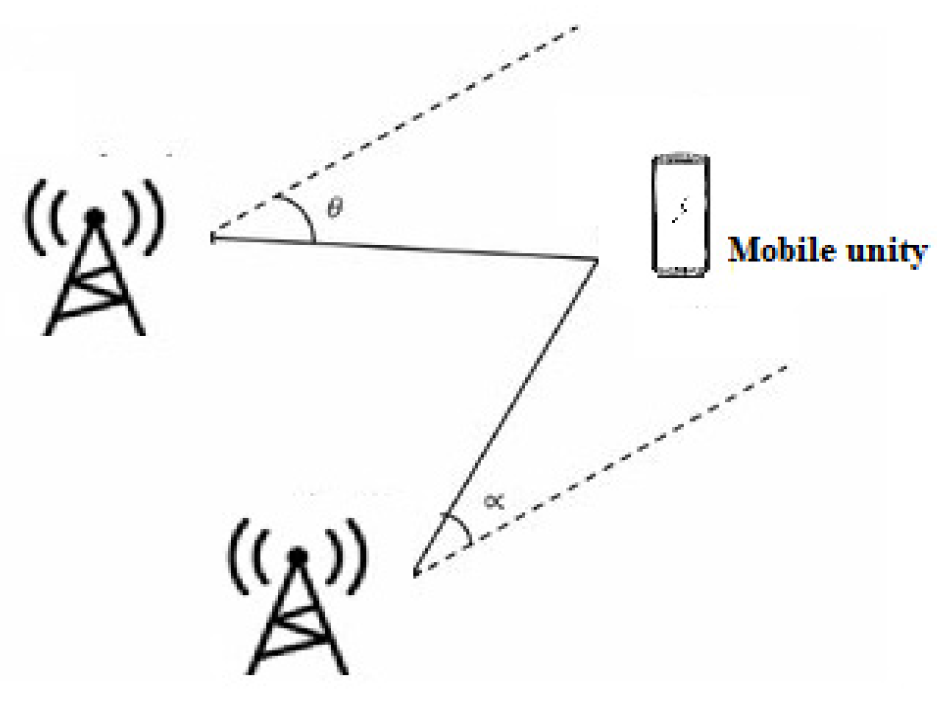
Angle of Arrival
3.3. Connectivity
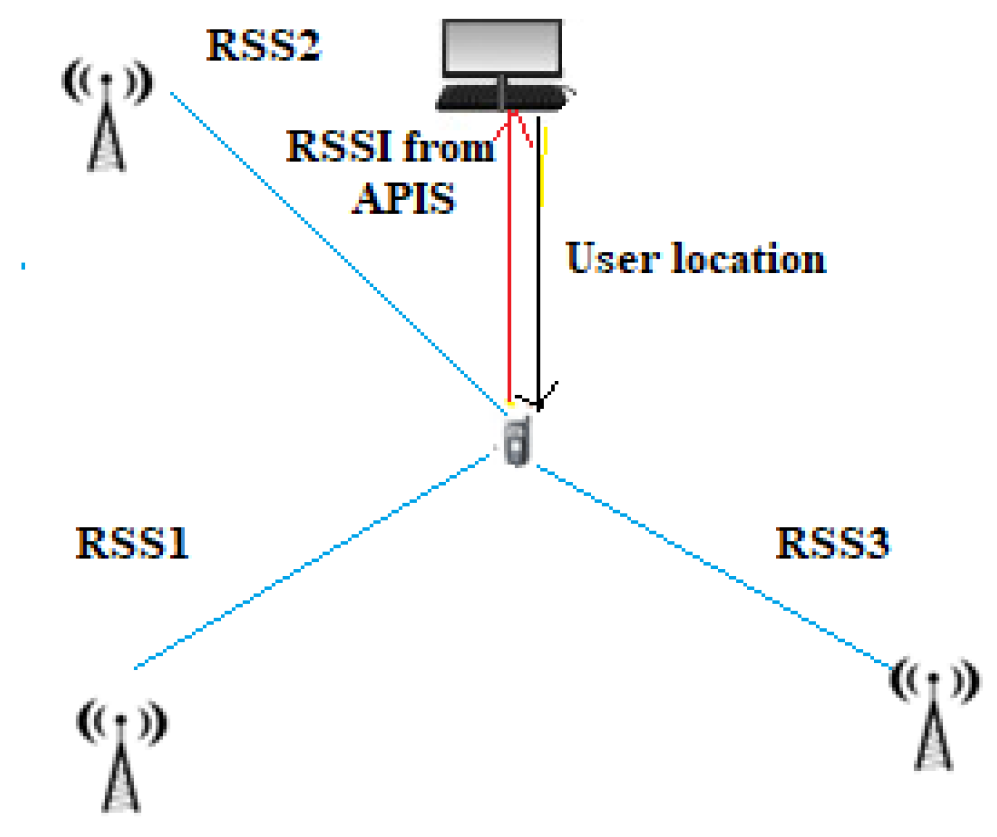
Received Signal Strength (RSS)
4. Localization Methods
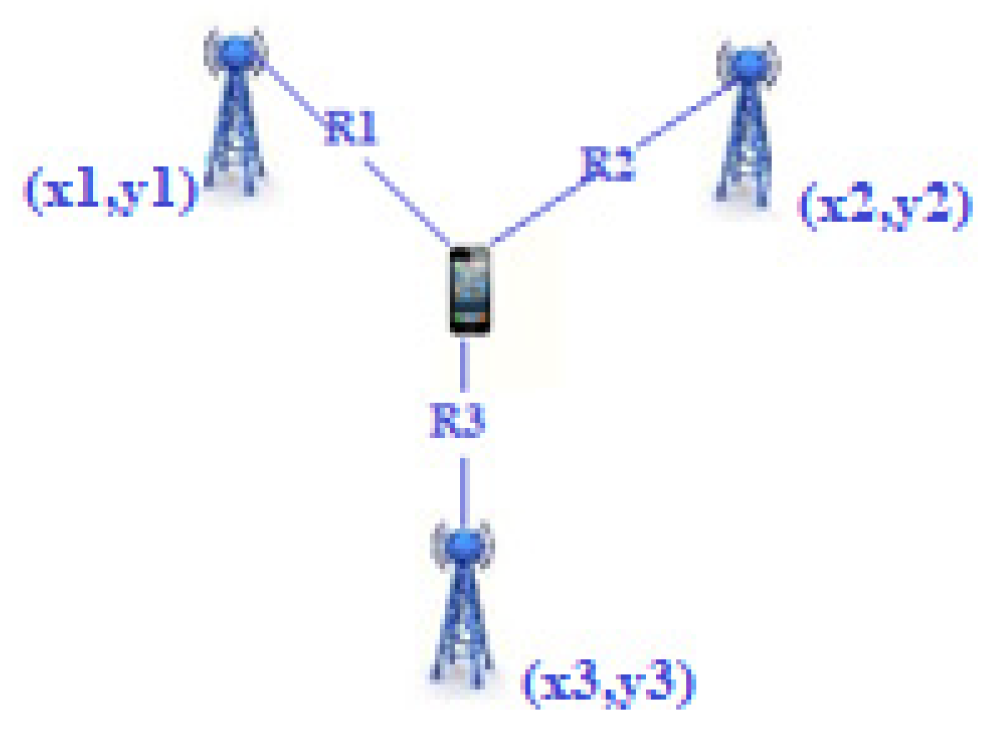
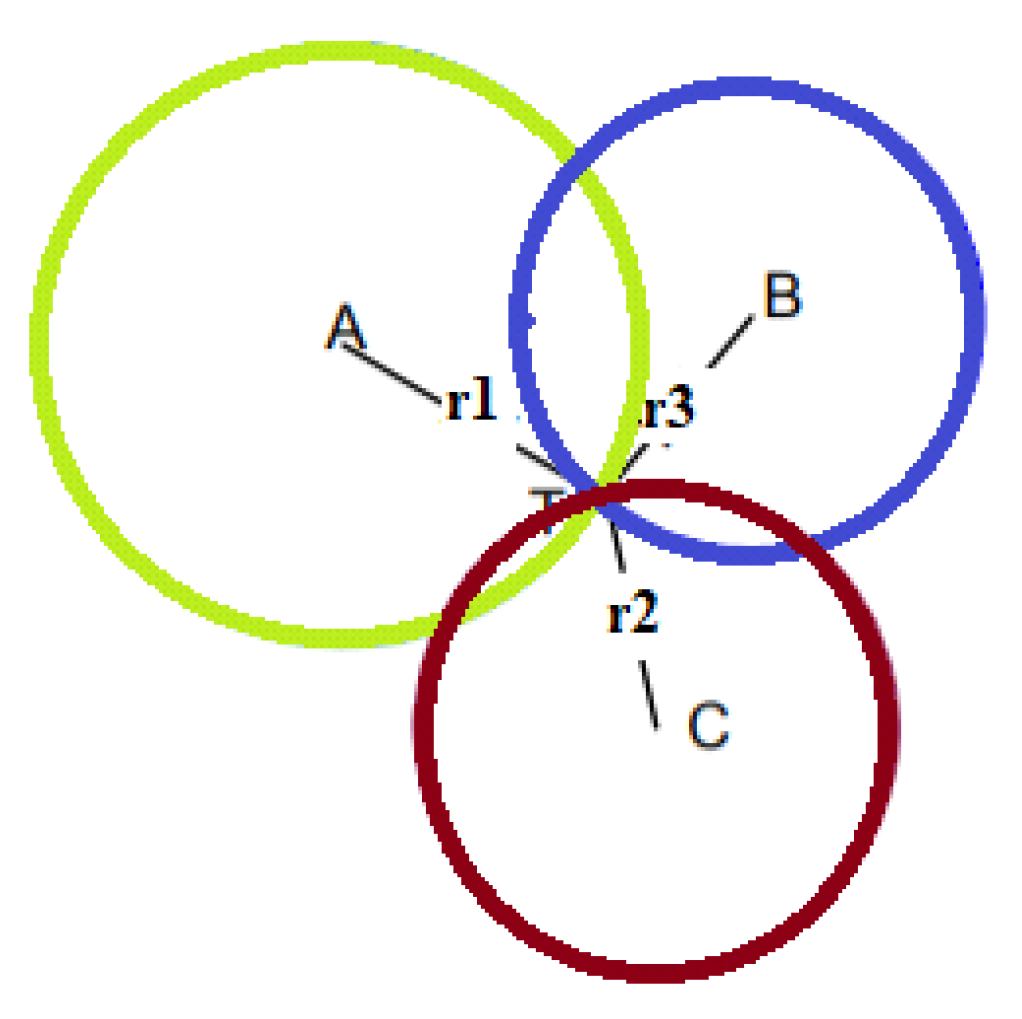
4.1. Trilateration or True-Range Multilateration
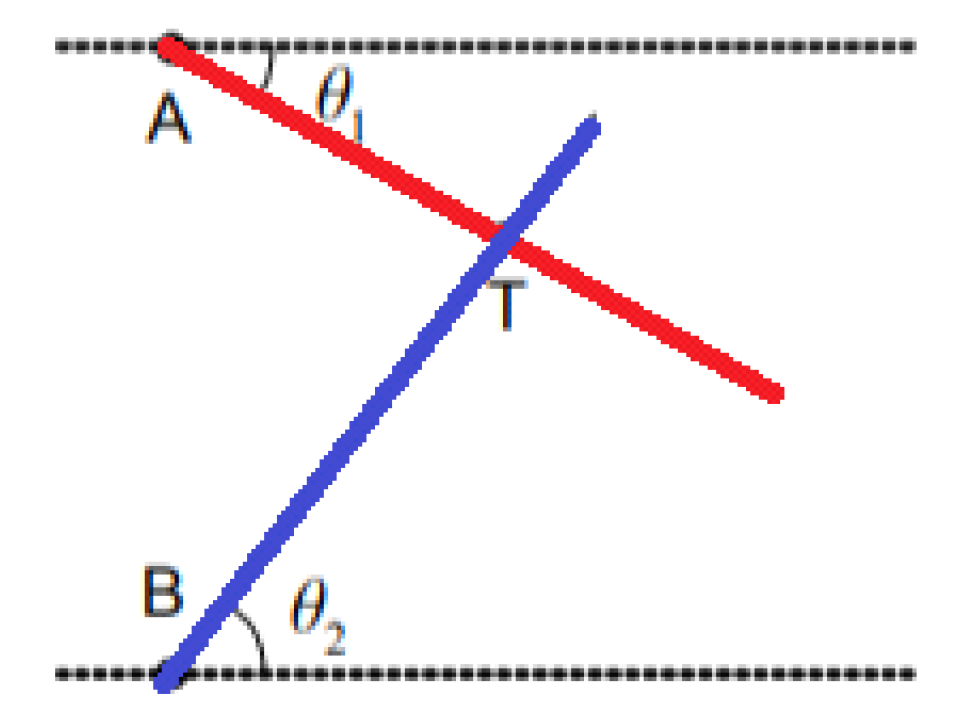
4.2. Triangulation
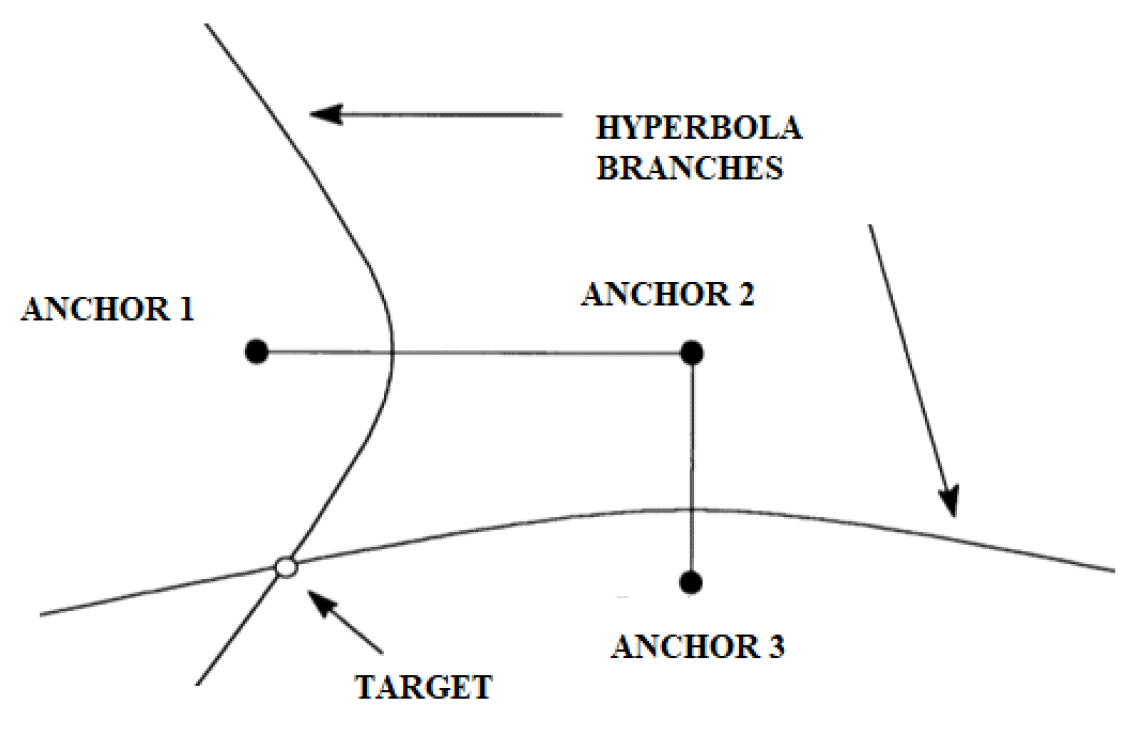
4.3. Pseudo-Range Multilateration
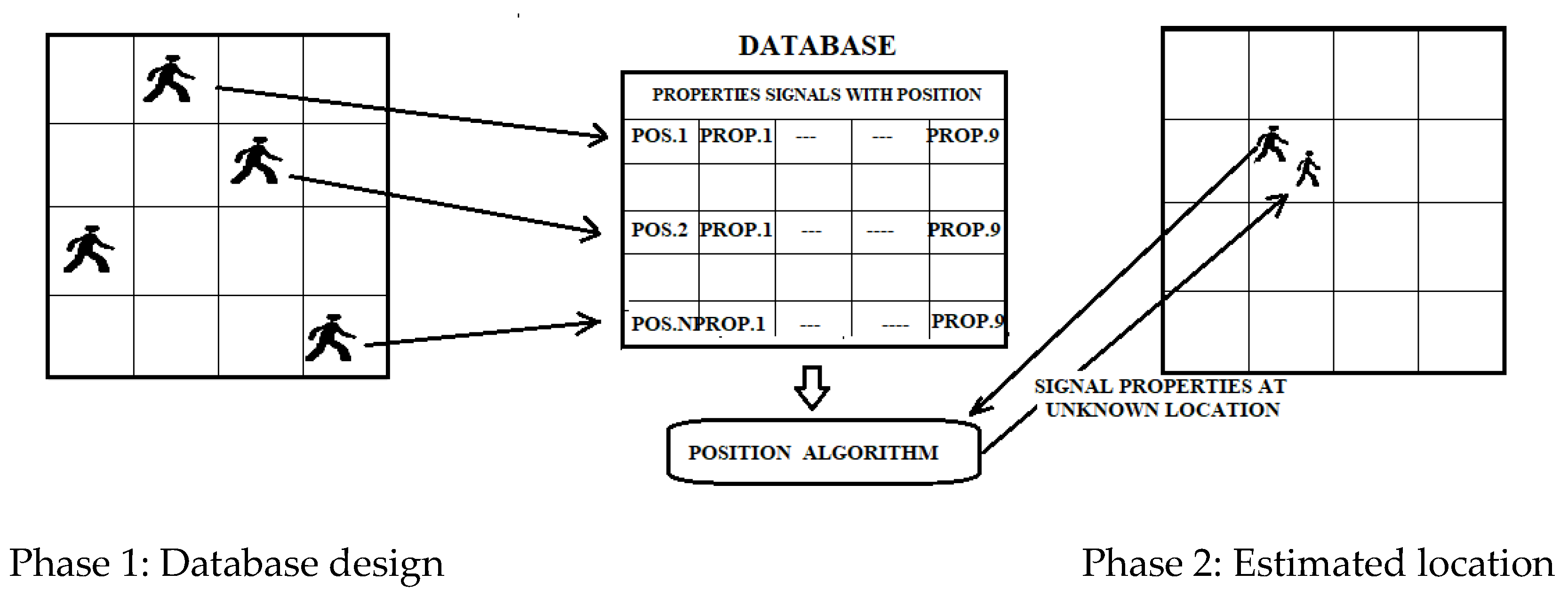
4.4. Fingerprinting
5. Signal Technologies
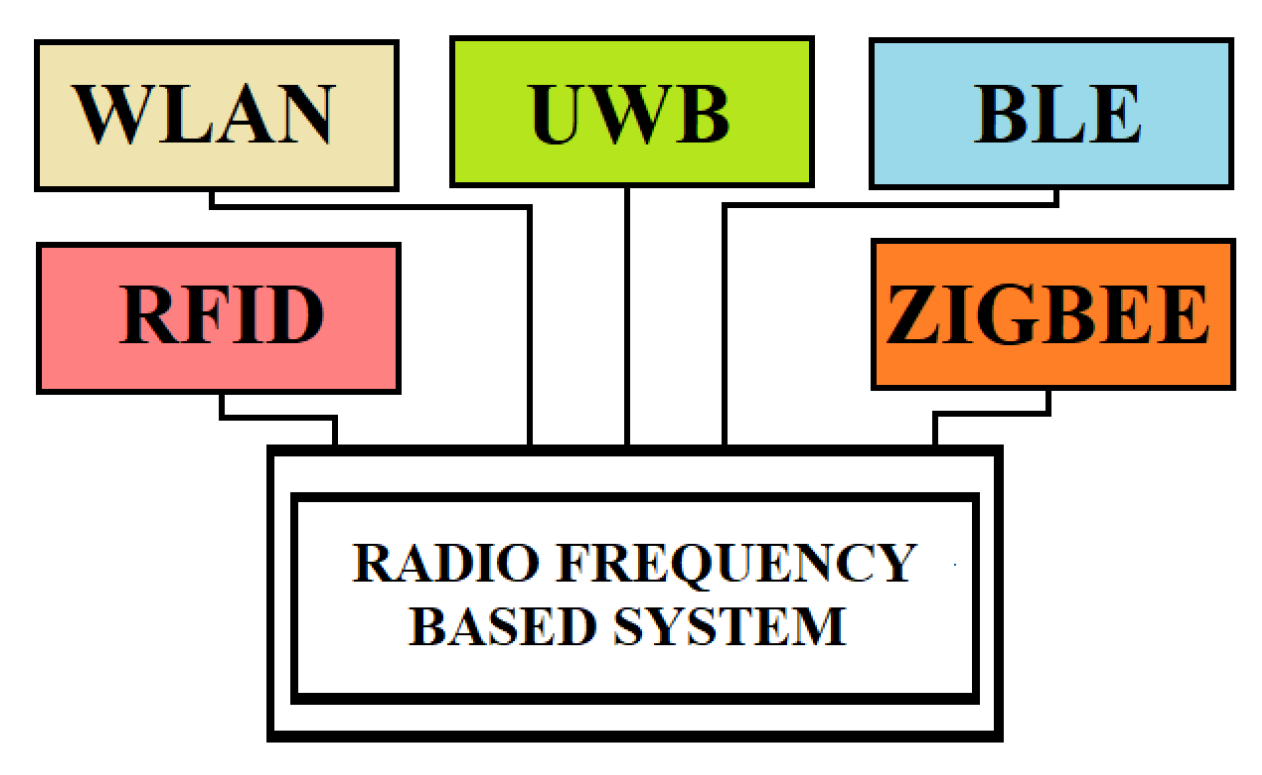
5.1. Radiofrequency-Based Systems (RF)
5.2. Ultrasound-Based Systems
5.3. Infrared-Based Systems (IR)
5.4. Magnetic Field-Based Systems
5.5. Optical System
5.6. Inertial System
6. Systems for HAR
6.1. Intelligent Metasurfaces
- Do not emit new radio waves;
- No power amplification;
- Low power consumption for operation;
- Low processing capacity for surface configuration.
- Nearly digital-computing-free intelligent sensing.
- Hybrid-computing-based intelligent sensing.
- Hybrid-computing-based intelligent integrated sensing.
6.2. Related Work
- Monitoring of the patient’s status. Various information is collected on the patient’s status concerning standing, walking, supine, and prone activities.
- Localization and tracking of patients. The exact knowledge of the patients allows a quick intervention of the assistants in case of need.
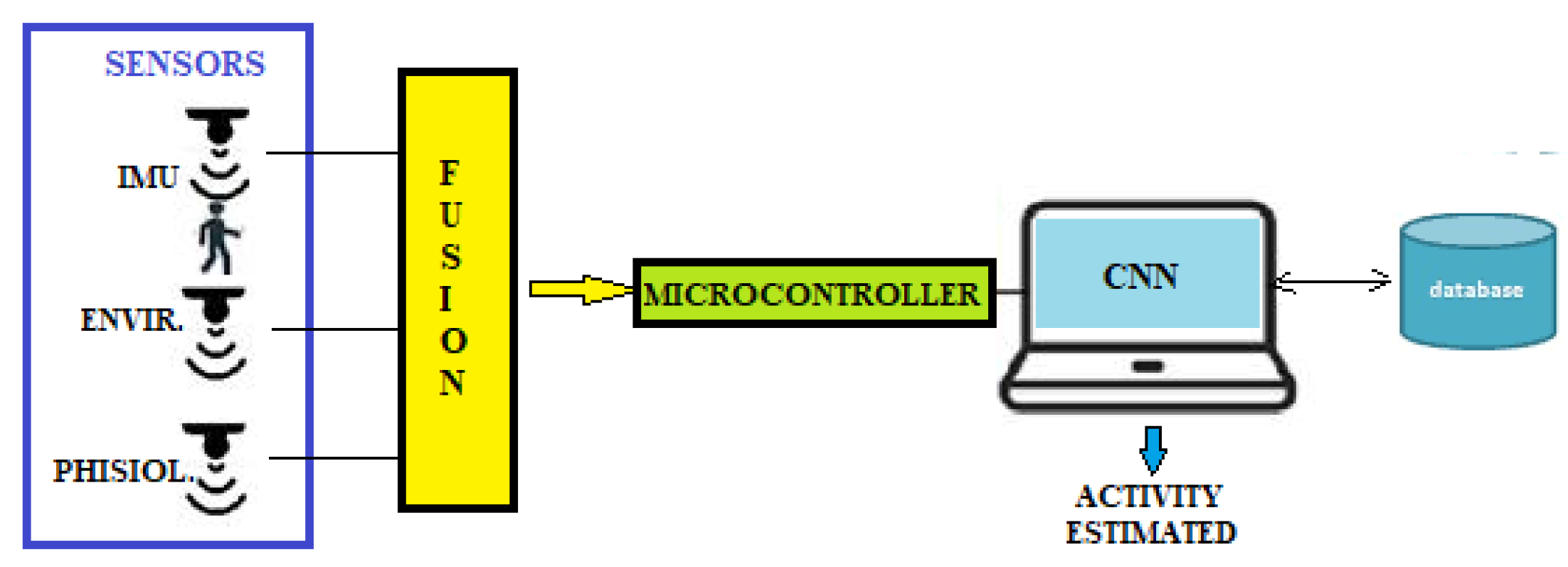
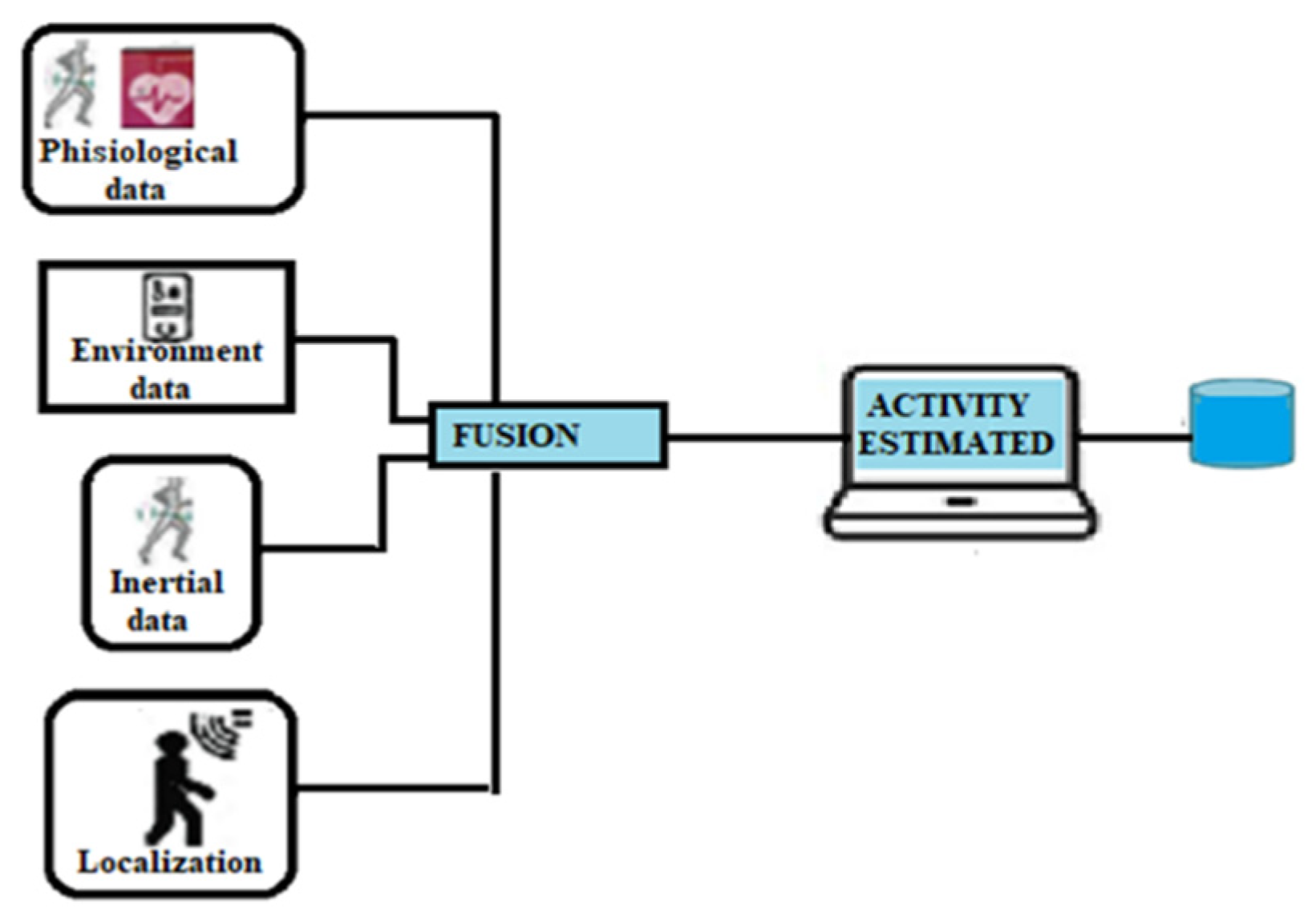
- Data collection connected to the patient activity such as inertial, physiological, environmental, and localization data;
- Design of a convolutional neural network for activity recognition;
- Identification of the exact elderly position.
7. Discussion
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gupta, N.; Gupta, S.K.; Pathak, R.K.; Jain, V.; Rashidi, P.; Suri, J.S. Human activity recognition in artificial intelligence framework: A narrative review. Artif. Intell. Rev. 2022, 55, 4755–4808. [Google Scholar] [CrossRef] [PubMed]
- Michalis, V.; Christophoros, N.; Ioannis, A.K. A Review of Human Activity Recognition Methods. Front. Robot. AI 2015, 2, 28. [Google Scholar]
- Kaluža, M.; Beg, K.; Vukelić, B. Analysis of an indoor positioning system. Zb. Veleučilišta Rijeci 2017, 5, 13–32. [Google Scholar] [CrossRef]
- Farahsari, P.S.; Farahzadi, A.; Rezazadeh, J.; Bagheri, A. A Survey on Indoor Positioning Systems for IoT-Based Application. IEEE Internet Things J. 2022, 9, 7680–7699. [Google Scholar] [CrossRef]
- Fritsche, C.; Klein, A. On the Performance of Hybrid GPS/GSM Mobile Terminal Tracking. In Proceedings of the 2009 IEEE International Conference on Communications Workshops, Kyoto, Japan, 27 September–4 October 2009; pp. 1–5. [Google Scholar]
- Ashour, I.; El Tokhey, M.; Mogahed, Y.; Ragheb, A. Performance of global navigation satellite systems (GNSS) in absence of GPS observations. Ain Shams Eng. J. 2022, 13, 101589. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, L.; Li, J.; Yang, Y.; Zhang, T.; Mao, Y.; Bijiao Sun, B.; Ren, X. Featured services and performance of BDS-3. Sci. Bull. 2021, 66, 2135–2143. [Google Scholar] [CrossRef]
- Hadas, T.; Kazmierski, K.; Sośnica, K. Performance of Galileo-only dual-frequency absolute positioning using the fully serviceable Galileo constellation. GPS Solut. 2019, 23, 108. [Google Scholar] [CrossRef]
- Zandbergen, P.A.; Barbeau, S.J. Positional accuracy of assisted GPS data from high-sensitivity GPS-enabled mobile phones. J. Navig. 2011, 64, 381–399. [Google Scholar] [CrossRef]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tuts. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Hui Liu, H.; Darabi, P.; Banerjee, J.L. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Huichao, L.V.; Feng, L.; Yang, A.; Lin, B.; Huang, H.; Chen, S. Two-dimensional code-based indoor positioning system with feature graphics. IEEE Photonics J. 2019, 11, 6800115. [Google Scholar]
- Xu, H.; An, F.; Wen, S.; Yan, Z.; Guan, W. Three-Dimensional Indoor Visible Light Positioning with a Tilt Receiver and a High Efficient LED-ID. Electronics 2021, 10, 1265. [Google Scholar] [CrossRef]
- Subedi, S.; Pyun, J.Y. Practical Fingerprinting Localization for Indoor Positioning System by Using Beacons. J. Sens. 2017, 2017, 9742170. [Google Scholar] [CrossRef]
- Obeidat, H.; Shuaieb, W.; Obeidat, O.; Abd-Alhameed, R. A Review of Indoor Localization Techniques and Wireless Technologies. Wirel. Pers. Commun. 2021, 119, 289–327. [Google Scholar] [CrossRef]
- Gezici, S. A survey on wireless position estimation. Wirel. Pers. Commun. 2008, 44, 263–282. [Google Scholar] [CrossRef]
- Clarify, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A. Ultra-Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors 2016, 16, 707. [Google Scholar]
- Ang, J.; Lee, W.K.; OoY, B.; Ooi, T. An IPS Evaluation Framework for Measuring the Effectiveness and Efficiency of Indoor Positioning Solutions. Lecture Notes in Electrical Engineering. In Proceedings of the International Conference on Information Science and Applications, Macau, China, 20–23 March 2017. [Google Scholar]
- Al Nuaimi, K.; Kamel, H. A survey of indoor positioning systems and algorithms. In Proceedings of the International Conference on Innovations in Information Technology (IIT), Abu Dhabi, United Arab Emirates, 25–27 April 2011; pp. 185–190. [Google Scholar]
- Jin, F.; Liu, K.; Zhang, H.; Kee-Yin Ng, J.; Guo, S.; Lee, V.C.S.; Son, S.H. Toward Scalable and Robust Indoor Tracking: Design, Implementation, and Evaluation. IEEE Internet Things J. 2020, 7, 1192–1204. [Google Scholar] [CrossRef]
- El-Gendy, M.S.; Fayez, M.M.; Abdel-Wahab, O.A.; Sayed, N.H.; Samir, Y.H.; El-Hennawey, S. Evaluation of Low-Cost Indoor Positioning for Next Generation IoT Industrial Applications. In Proceedings of the IEEE International Conference on Communications Workshops (ICC Workshops), Virtual, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Holder, S.; Torres-Sospedra, J.; Gould, M.; Remolar, I. Privacy in Indoor Positioning Systems: A Systematic Review. In Proceedings of the International Conference on Localization and GNSS (ICL-GNSS) 2020, Tampere, Finland, 2–4 June 2020. [Google Scholar]
- Wang, J.; Ghosh, R.; Das, S. A survey on sensor localization. J. Control Theory Appl. 2010, 8, 2–11. [Google Scholar] [CrossRef]
- Ma, Z.; Ho, C.K. TOA localization in the presence of random sensor position errors. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 2468–2471. [Google Scholar]
- Wu, P.; Su, S.; Zhen Zuo, Z.; Guo, X.; Sun, B.; Wen, X. Time Difference of Arrival (TDoA) Localization Combining Weighted Least Squares and Firefly Algorithm. Sensors 2019, 19, 2554. [Google Scholar] [CrossRef]
- O’Keefe, B. Finding Location with Time of Arrival and Time Difference of Arrival Techniques; ECE Senior Capstone Project 2017, Tech Notes; Tufts University: Medford, MA, USA, 2017. [Google Scholar]
- Gentner, C.; Ulmschneider, M.; Kuehner, I.; Dammann, A. WiFi-RTT Indoor Positioning. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 1029–1035. [Google Scholar]
- Hou, Y.; Yang, X.; Abbasi, Q.H. Efficient AoA-Based Wireless Indoor Localization for Hospital Outpatients Using Mobile Devices. Sensors 2018, 18, 3698. [Google Scholar] [CrossRef]
- Al-Bawri, S.S.; Islam, M.T.; Mandeep Jit Singh, M.J.; James, M.F.; Narbudowicz, A.; Max, J.; Ammann, M.J.; Dominique, M.; Schreurs, M.P. DMMP. RSS-Based Indoor Localization System with Single Base Station. Comput. Mater.Contin. 2022, 70, 5437–5452. [Google Scholar]
- Wojcicki, P.; Zientarski, T.; Charytanowicz, M.; Lukasik, E. Estimation of the Path-Loss Exponent by Bayesian Filtering Method. Sensors 2021, 21, 1934. [Google Scholar] [CrossRef] [PubMed]
- Pande, S.; Ibwe, K.S. Robust Trilateration Based Algorithm for Indoor Positioning Systems. Tanzan. J. Sci. 2021, 47, 1195–1210. [Google Scholar] [CrossRef]
- Kuruoglu, G.S.; Erol, M.; Oktug, S. Localization in Wireless Sensor Networks with Range Measurement Errors. In Proceedings of the Fifth Advanced International Conference on Telecommunications, Venice, Italy, 24–28 May 2009; pp. 261–266. [Google Scholar]
- Javed, Y.; Khan, Z.; Asif, S. Evaluating Indoor Location Triangulation Using WiFi Signals. In Advances in Internet, Data and Web Technologies; EDIT 2019, Lecture Notes on Data Engineering and Communications Technologies; Barolli, L., Xhafa, F., Khan, Z., Odhabi, H., Eds.; Springer: Cham, Switzerland, 2019; Volume 29. [Google Scholar]
- Leelavathy, S.R.; Sophia, S. Providing Localization using Triangulation Method in Wireless Sensor Networks. Int. J. Innov. Technol. Explor. Eng. (IJITEE) 2014, 4, 47–50. [Google Scholar]
- Sestrem de Oliveira, L.; Kerusauskas Rayel, O.; Paulo Leitao, P. Low-Cost Indoor Localization System Combining Multilateration and Kalman Filter. In Proceedings of the IEEE 30th International Symposium on Industrial Electronics (ISIE), Online, 20–23 June 2021. [Google Scholar]
- Yu, X.; Wang, H.Q.; Wu, J.Q. A method of fingerprint indoor localization based on received signal strength difference by using compressive sensing. J. Wirel. Com. Netw. 2020, 2020, 72. [Google Scholar] [CrossRef]
- Kotaru, M.; Raj Joshi, K.; Bharadia, D.; Katti, S. SpotFi: Decimeter Level Localization Using WiFi. In Proceedings of the 2015 ACM Conference on Special Interest Group on Data Communication, London, UK, 17–21 August 2015. [Google Scholar]
- Clegg, F.M.; Sears, M.; Friesen, M.; Scarato, T.; Metzinger, R.; Russell, C.; Stadler, A.; Miller, A.B. Building science and radiofrequency radiation: What makes smart and healthy buildings. Build. Environ. 2020, 176, 106324. [Google Scholar] [CrossRef]
- Liu, J. Survey of Wireless-Based Indoor Localization Technologies; Department of Science & Engineering, Washington University: St. Louis, MO, USA, 2014. [Google Scholar]
- Zhang, J.; Tian, G.Y.; Marindra, A.M.J.; Sunny, A.I.; Zhao, A.B. A Review of Passive RFID Tag Antenna-Based Sensors and Systems for Structural Health Monitoring Applications. Sensors 2017, 17, 265. [Google Scholar] [CrossRef]
- Chen, C.; Chen, Y.; Lai, H.; Han, Y.; Liu, K.J.R. High accuracy indoor localization: A WiFi-based approach. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 6245–6249. [Google Scholar]
- Roy, P.; Chowdhury, C. A survey on ubiquitous WiFi-based indoor localization system for smartphone users from implementation perspectives. CCF Trans. Pervasive Comp. Interact. 2022, 4, 298–318. [Google Scholar] [CrossRef]
- Liu, F.; Liu, J.; Yin, Y.; Wang, W.; Hu, D.; Chen, P.; Niu, Q. Survey on WiFi-based indoor positioning techniques. IET Commun. 2020, 14, 1372–1383. [Google Scholar] [CrossRef]
- Daniş, F.S.; Cemgil, A.T. Model-Based Localization and Tracking Using Bluetooth Low Energy Beacons. Sensors 2017, 17, 2484. [Google Scholar] [CrossRef]
- Subedi, S.; Hwang, S.S.; Pyun, J.Y. Hybrid Wireless Indoor Positioning System Combining BLE Beacons And WiFi Apps. In Proceedings of the International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 21–23 October 2020; pp. 36–41. [Google Scholar]
- Mussina, A.; Aubakirov, S. RSSI Based Bluetooth Low Energy Indoor Positioning. In Proceedings of the IEEE 12th International Conference on Application of Information and Communication Technologies (AICT), Almaty, Kazakhstan, 17–19 October 2018; pp. 1–4. [Google Scholar]
- Zuin, S.; Calzavara, M.; Sgarbossa, F.; Persona, A. Ultra-Wide Band Indoor Positioning System: Analysis and testing of an IPS technology. IFAC-Pap. Online 2018, 51, 1488–1492. [Google Scholar]
- Monica, S.; Bergen, F. Hybrid Indoor Localization Using WiFi and UWB Technologies. Electronics 2019, 8, 334. [Google Scholar] [CrossRef]
- Alvarez, Y.; Las Heras, F. ZigBee-based Sensor Network for Indoor Location and Tracking Applications. IEEE Lat. Am. Trans. 2016, 14, 3208–3214. [Google Scholar] [CrossRef]
- Yan, D.; Kang, B.; Zhong, H.; Wang, R. Research on positioning system based on Zigbee communication. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 October 2018; pp. 1027–1030. [Google Scholar]
- Jahren, S.E.; Aakvaag, N.; Strisland, F.; Vogl, A.; Liberale, A.; Liverud, A.E. Towards Human Motion Tracking Enhanced by Semi-Continuous Ultrasonic Time-of-Flight Measurements. Sensors 2021, 21, 2259. [Google Scholar] [CrossRef]
- Carotenuto, R.; Merenda, M.; Iero, D.; Della Corte, F.G. An indoor ultrasonic system for autonomous 3D positioning. IEEE Trans. Instrum. Meas. 2019, 68, 2507–2518. [Google Scholar] [CrossRef]
- Qi, J.; Liu, G.-P. A Robust High-Accuracy Ultrasound Indoor Positioning System Based on a Wireless Sensor Network. Sensors 2017, 17, 2554. [Google Scholar] [CrossRef]
- Santagati, G.E.; Melodia, T. Sonar Inside Your Body: Prototyping ultrasonic intra-body sensor networks. In Proceedings of the IEEE Conference on Computer Communications (INFOCOM), Toronto, ON, Canada, 27 April–2 May 2014. [Google Scholar]
- Popoola, O.R.; Popoola, W.O.; Ramirez-Iniguez, R.; Sinanović, S. Design of improved IR protocol for LED indoor positioning system. In Proceedings of the 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; pp. 882–887. [Google Scholar]
- Arbella, D.; Ljubic, S. Indoor Localization Based on Infrared Angle of Arrival Sensor Network. Sensors 2020, 20, 6278. [Google Scholar] [CrossRef]
- Le, G.D. Localization with Symbolic Precision Using Diffuse Infrared Radiation. In Proceedings of the SCC 2015, 10th International ITG Conference on Systems, Communications and Coding, Hamburg, Germany, 2–5 February 2015; pp. 1–6. [Google Scholar]
- Taylor, M.T.; Hranilovic, S. Angular diversity approach to indoor positioning using visible light. In Proceedings of the IEEE Globecom Workshops (GC Wkshps), Atlanta, GA, USA, 9–13 December 2013; pp. 1093–1098. [Google Scholar]
- Carotenuto, R. A range estimation system using coded ultrasound. Sens. Actuators A-Phys. 2016, 238, 104–111. [Google Scholar] [CrossRef]
- Fedele, R.; Della Corte, F.G.; Carotenuto, R.; Praticò, F.G. Sensing Road pavement health status through acoustic signals analysis. In Proceedings of the 13th Conference on Ph.D. Research in Microelectronics and Electronics (PRIME), Taormina, Italy, 12–15 June 2017. [Google Scholar]
- Chen, C.H.; Chen, P.W.; Chen, P.J.; Liu, T.H. Indoor Positioning Using Magnetic Fingerprint Map Captured by Magnetic Sensor Array. Sensors 2021, 21, 5707. [Google Scholar] [CrossRef]
- Wang, E.; Wang, M.; Meng, Z.; Xu, X. A Study of WiFi-Aided Magnetic Matching Indoor Positioning Algorithm. J. Comput. Commun. 2017, 5, 91–101. [Google Scholar] [CrossRef]
- Putta, R.; Misra, M.; Kapoor, D. Smartphone based indoor tracking using magnetic and indoor maps. In Proceedings of the IEEE Tenth International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP), Singapore, 7–9 April 2015; pp. 1–6. [Google Scholar]
- Carbone, P. Magnetic Field Based Positioning Systems. Tech Rxiv 2021. [Google Scholar] [CrossRef]
- Nasir Khan, M.; Jamil, M.; Gilani, S.O.; Ahmad, I.; Uzair, M.; Omer Gőzse, H. Photo detector-based indoor positioning systems variants: A new look. Comput. Electr. Eng. 2020, 83, 106607. [Google Scholar] [CrossRef]
- Morar, A.; Moldoveanu, A.; Mocanu, I.; Moldoveanu, F.; Radoi, I.E.; Asavei, V.; Gradinaru, A.; Butean, A. A Comprehensive Survey of Indoor Localization Methods Based on Computer Vision. Sensors 2020, 20, 2641. [Google Scholar] [CrossRef] [PubMed]
- El-Sheimy, N.; Youssef, A. Inertial sensors technologies for navigation applications: State of the art and future trends. Satell. Navig. 2020, 1, 2. [Google Scholar] [CrossRef]
- Lu, C.; Uchiyama, H.; Thomas, D.; Shimada, A.; Taniguchi, R. Indoor Positioning System Based on Chest-Mounted IMU. Sensors 2019, 19, 420. [Google Scholar] [CrossRef]
- Han, B.B.; Zhao, L. An indoor positioning algorithm based on WiFi fingerprint and inertial navigation system. In Proceedings of the 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 6067–6072. [Google Scholar]
- Hsieh, J.-W.; Hsu, Y.-T.; Liao, H.-Y.M.; Chen, C.-C. Video-based human movement analysis and its application to surveillance systems. IEEE T Multimed. 2008, 10, 372–384. [Google Scholar] [CrossRef]
- Chenglin, L.; Di, N.; Bei, J.; Xiao, Z.; Jianming, Y. Meta-HAR: Federated Representation Learning for Human Activity Recognition. In Proceedings of the Web Conference, Ljubljana, Slovenia, 19–23 April 2021. [Google Scholar]
- Jamil, H.; Qayyum, F.; Jamil, F.; Kim, D.-H. Enhanced PDR-BLE Compensation Mechanism Based on HMM and AWCLA for Improving Indoor Localization. Sensors 2021, 21, 6972. [Google Scholar] [CrossRef]
- Di Renzo, M.; Zappone, A.; Debbah, M.; Alouini, M.-S.; Yuen, C.; de Rosny, J.; Tretyakov, S. Smart Radio Environments Empowered by Reconfigurable Intelligent Surfaces: How it Works, State of Research, and Road Ahead. IEEE J. Sel. Areas Commun. 2020, 38, 2450–2525. [Google Scholar] [CrossRef]
- Dai, L.; Wang, B.; Wang, M.; Yang, X.; Tan, J.; Bi, S.; Xu, S.; Yang, F.; Chen, Z.; Di Renzo, M.; et al. Reconfigurable Intelligent Surface-Based Wireless Communications: Antenna Design, Prototyping, and Experimental Results. IEEE Access 2020, 8, 45913–45923. [Google Scholar] [CrossRef]
- Li, L.; Zhao, H.; Liu, C.; Li, L.; Cui, T.J. Intelligent metasurfaces: Control, communication and computing. eLight 2022, 2, 7. [Google Scholar] [CrossRef]
- Cui, T.J.; Qi, M.Q.; Wan, X.; Zhao, J.; Cheng, Q. Coding metamaterials, digital metamaterials and programmable metamaterials. Light Sci. Appl. 2014, 3, e218. [Google Scholar] [CrossRef]
- Li, L.; Shuang, Y.; Ma, Q.; Li, H.; Zhao, H.; Wei, M.; Liu, C.; Hao, C.; Qiu, C.-W.; Cui, T.J. Intelligent metasurface imager and recognizer. Light Sci. Appl. 2019, 8, 97. [Google Scholar] [CrossRef]
- Vandewiele, F.; Motamed, C. An unsupervised learning method for human activity recognition based on a temporal qualitative model. In Proceedings of the International Workshop on Behaviour Analysis and Video Understanding (ICVS 2011), Sophia Antipolis, France, 23 September 2011. [Google Scholar]
- Moreira, D.; Barandas, M.; Rocha, T.; Alves, P.; Santos, R.; Leonardo, R.; Vieira, P.; Gamboa, H. Human Activity Recognition for Indoor Localization Using Smartphone Inertial Sensors. Sensors 2021, 21, 6316. [Google Scholar] [CrossRef] [PubMed]
- Guimarães, V.; Castro, L.; Carneiro, S.; Monteiro, M.; Rocha, T.; Barandas, M.; Machado, J.; Vasconcelos, M.; Gamboa, H.; Elias, D. A motion tracking solution for indoor localization using smartphones. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Madrid, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Ruan, W. Unobtrusive Human Localization and Activity Recognition for Supporting Independent Living of the Elderly. In Proceedings of the Eightieth Annual PhD Forum on Pervasive Computing and Communications, Sydney, Australia, 14–18 March 2016. [Google Scholar]
- Dao, T.H.; Nguyen, Q.C.; Ngo, V.D.; Le, M.T.; Hoang, C.A. Indoor Localization System Based on Passive RFID Tags. In Proceedings of the 5th International Conference on Intelligent Systems, Modelling and Simulation, Langkawi, Malaysia, 27–29 January 2014; pp. 579–584. [Google Scholar]
- Guo, S.; Xiong, H.; Zheng, X.; Zhou, Y. Activity Recognition and Semantic Description for Indoor Mobile Localization. Sensors 2017, 17, 649. [Google Scholar] [CrossRef]
- Wang, F.; Feng, J.; Zhao, Y.; Zhang, X.; Zhang, S.; Han, J. Joint Activity Recognition and Indoor Localization with WiFi Fingerprints. IEEE Access 2019, 7, 80058–80068. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Fiorini, L.; Bonaccorsi, M.; Betti, S.; Esposito, D.; Cavallo, F. Combining Wearable Physiological and Inertial Sensors with Indoor User Localization Network to Enhance Activity Recognition. J. Ambient Intell. Smart Environ. 2018, 10, 345–357. [Google Scholar] [CrossRef]
- Redondi, A.; Chirico, M.; Borsani, L.; Cesana, M.; Tagliasacchi, M. An integrated system based on wireless sensor networks for patient monitoring, localization and tracking. Ad Hoc Netw. 2013, 11, 39–53. [Google Scholar] [CrossRef]
- Bibbò, L.; Carotenuto, R.; Della Corte, F.; Merenda, M.; Messina, G. Home care System for elderly and pathological conditions. In Proceedings of the 2022 7th International Conference on Smart and Sustainable Technologies (SpliTech), Bol, Croatia, 5–8 July 2022. [Google Scholar]
- Bibbò, L.; Morabito, F.C. Neural Network Design using a Virtual Reality Platform. Glob. J. Comput. Sci. Technol. D Neural Artif. Intell. 2022, 22, D1. [Google Scholar] [CrossRef]
- Weiss, A.J.; Weinstein, E. Fundamental limitations in passive time delay estimation—Part I: Narrow-band systems. IEEE Trans. Acoust. Speech Signal Process. 1983, 31, 472–486. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Wi-Fi | Ultrasound | Infrared | Bluetooth | Rigid | ZigBee | UWB |
|---|---|---|---|---|---|---|---|
| Accuracy | 1–10 | 0.01–0.1 | 5–10 | 2–15 | 0.5 (passive) 1 (active) | 1–5 | 0.1–1 |
| Coverage | 20–50 | 2–10 | 1–5 | 1–30 | 1–100 | 10–100 | 0.50–10 |
| Technique | Accuracy | Cost | Advantages | Disadvantages |
|---|---|---|---|---|
| TOA | High | High | Scalability, does not require any fingerprint | Needs time synchronization, difficult to implement, produces multipath effects |
| TOP | High | High | No need time synchronization among devices and received nodes, does not require any fingerprint | Requires time synchronization between the received nodes, difficult to implement in narrow bandwidth, multipath effects |
| RTT | High | High | Does not require time synchronization, low complexity | Affected by multipath effects and noise, different processing time delays |
| AOA | Medium | High | No need for any fingerprint, no need for time synchronization, low number of APs | Requires additional directional antennas, decreases in accuracy as distance from source increases |
| RSS | Low | Medium | No need for synchronization, can be used with different technologies, easy to implement | Suffers from multipath effect, noise, can require fingerprint |
| Technology | Measure Method | Cost | Advantages | Disadvantages | Accuracy (m) |
|---|---|---|---|---|---|
| RFID | Proximity, RSS TOA, TDOA, AOA | High | Does not require LOS between TR and RT, simultaneous and fast reading of multiple tags | Small coverage, multipath effect and signal fluctuation, limited capabilities of passive tags | 0.5 (passive) 1 (active) |
| WLAN | RSS, TDOA | Medium | Does not require LOS, presence in multiple buildings, medium scalability | Complex methodology, system redesign in case of changes in the environment | 10–50 |
| Bluetooth | TDOA, RSS | Low–medium | Good accuracy, no need additional infrastructure, does not require LOS, present in most smartphones | RF interference, limited coverage and mobility | 2–15 |
| UWB | TDOA | High | Low energy consumption, high accuracy, passes through walls and any other obstacles | Needs time synchronization, limited coverage, performance degrades in NLOS. | 0.1–1 |
| ZigBee | RSS, AP ID | Low | Low power consumption | Requires special equipment, vulnerable to interference caused by a wide range of signal types | 1–5 |
| Ultrasound | TOA, TDOA | Medium | Good accuracy, not affected by multipath | Interference by high-frequency sound, loss of signal for obstruction | 0.01–0.1 |
| Infrared | AOA, TOA, TDOA | Medium | Low power, no multipath effect, medium accuracy | Does not penetrate walls, requires LOS, sunlight interference, short range | 5–10 |
| Magnetic | AOA, TOA | Medium | Medium power consumption | Requires magnetic field mapping, errors increase with the size of the fingerprinting map | 1–3 |
| Optical | Scene analysis, proximity | Medium | Performance improvement by fusion of image data with data from other sensors | The transformation from the image space into the object space requires additional depth information | 0.1 |
| Inertial | Dead reckoning | Low | Great reliability, reduced size | Cumulative errors, high complexity | Error range 0.5–2% total traveled distance |
| Typology | Advantages | Disadvantages | Accuracy |
|---|---|---|---|
| Visual-sensor | Ease of use, ease of analysis from images, data reliability, alternative to multiple sensory devices, | Privacy, sensitive to environmental conditions, higher cost, increased processing power, longer processing time | 99% |
| Non-visual sensors | Detection of any information about behavior, no privacy issues, lower cost, less processing power, lower power consumption, less processing time | Need for a large set of sensors, data reliability, system vulnerability due to sensor malfunction, lower accuracy values | 70–80% |
| Multimodal sensor | Suitable for the collection of data of different nature, lightweight devices, lower power consumption, less processing time | Need for multiple sensors, acceptance issues, need to wear sensors, efficient fusion algorithms | 99% |
| Author | Adopted System | Technology | Technique | Accuracy |
|---|---|---|---|---|
| Jamil [72] | Inertial sensors of smartphone | PDR-BLE | EPBCM/HMM | 99% |
| Vandewiele [78] | Cameras and smart home sensors | Visual/Wi-Fi | Unsupervised model | 77% |
| Moreira [79] | Inertial sensors of smartphone | Fingerprints | ConVLSTM | 84% |
| Ruan [81] | RFID | Wi-Fi | KNN | Not declared |
| Dao [82] | UHF/RFID Landmark | Wi-Fi | KNN | 32 cm error |
| Guo [83] | Inertial sensors of smartphone | PDR | KNN | 99% |
| Wang [84] | Inertial sensor | Wi-Fi fingerprints | C1D | 88% recognition, 95% localization |
| Fiorini [86] | Inertial–physiological sensor (ECG) | Bluetooth | DT/SVM/ANN | 0.924–0.994 DT 0.995–0.999 SVM 0.839–0.917 ANM |
| Redondi [87] | Anchors/mobile device | Wi-Fi | DT | 99% |
| Bibbò [88] | MEMS/ultrasound | Wi-Fi | CNN | 99% recognition 1 cm localization |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bibbò, L.; Carotenuto, R.; Della Corte, F. An Overview of Indoor Localization System for Human Activity Recognition (HAR) in Healthcare. Sensors 2022, 22, 8119. https://doi.org/10.3390/s22218119
Bibbò L, Carotenuto R, Della Corte F. An Overview of Indoor Localization System for Human Activity Recognition (HAR) in Healthcare. Sensors. 2022; 22(21):8119. https://doi.org/10.3390/s22218119
Chicago/Turabian StyleBibbò, Luigi, Riccardo Carotenuto, and Francesco Della Corte. 2022. "An Overview of Indoor Localization System for Human Activity Recognition (HAR) in Healthcare" Sensors 22, no. 21: 8119. https://doi.org/10.3390/s22218119
APA StyleBibbò, L., Carotenuto, R., & Della Corte, F. (2022). An Overview of Indoor Localization System for Human Activity Recognition (HAR) in Healthcare. Sensors, 22(21), 8119. https://doi.org/10.3390/s22218119