
Real-Time Avalanche Hazard Monitoring System Based on Weather Sensors and a Laser Rangefinder

 , , ,
, , , 
Abstract
:1. Introduction
2. Materials and Methods
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bourova-Flin, E.; Maldonado, E.; Leroy, J.-B.; Alouani, R.; Eckert, N.; Bonnefoy-Demongeot, M.; Deschatres, M. A new web-based system to improve the monitoring of snow avalanche hazard in France. Nat. Hazards Earth Syst. Sci. 2016, 16, 1205–1216. (In English) [Google Scholar] [CrossRef]
- Bian, R.; Huang, K.; Liao, X.; Ling, S.; Wen, H.; Wu, X. Snow avalanche susceptibility assessment based on ensemble machine learning model in the central Shaluli Mountain Front. Earth Sci. 2022, 10, 880711. [Google Scholar] [CrossRef]
- Cetinkaya, S.; Kocaman, S. Integrating Sequential Backward Selection (SBS) and CatBoost for Snow Avalanche Susceptibility Mapping at Catchment Scale. ISPRS Int. J. Geo-Inf. 2024, 13, 312. [Google Scholar] [CrossRef]
- Yang, J.; Li, C.; Li, L.; Ding, J.; Zhang, R.; Han, T.; Liu, Y. Automatic Detection of Regional Snow Avalanches with Scattering and Interference of C-band SAR Data. Remote Sens. 2020, 12, 2781. [Google Scholar] [CrossRef]
- Eckerstorfer, M.; Malnes, E.; Müller, K. A complete snow avalanche activity record from a Norwegian forecasting region using Sentinel-1 satellite-radar data. Cold Reg. Sci. Technol. 2017, 144, 39–51. [Google Scholar] [CrossRef]
- Fox, J.; Siebenbrunner, A.; Reitinger, S.; Peer, D.; Rodriguez-Sanchez, A. Deep Learning for Real-Time Avalanche Detection in Webcam Images. In Proceedings of the International Snow Science Workshop ISSW, Bend, OR, USA, 8–13 October 2023. [Google Scholar]
- Edme, P.; Paitz, P.; Walter, F.; van Herwijnen, A.; Fichtner, A. Fiber-optic detection of snow avalanches using telecommunication infrastructure. arXiv 2023, arXiv:2302.12649. [Google Scholar] [CrossRef]
- Marchetti, E.; Ripepe, M.; Ulivieri, G.; Kogelnig, A. Infrasound array criteria for automatic detection and front velocity estimation of snow avalanches: Towards a real-time early-warning system. Nat. Hazards Earth Syst. Sci. 2015, 15, 2545–2555. [Google Scholar] [CrossRef]
- Sauermoser, S.; Rudolf-Miklau, F.; Margreth, S. The Technical Avalanche Protection Handbook; John Wiley and Sons: Weinheim, Germany, 2014; p. 430. [Google Scholar] [CrossRef]
- Aydin, A.; Eker, R. GIS-Based snow avalanche hazard mapping: Bayburt-AşağıDere catchment case. J. Environ. Biol. 2017, 38, 937–943. [Google Scholar] [CrossRef]
- Aydin, A.; Eker, R.; Odabasi, Y.B. Generating Avalanche Hazard Indication Map and Determining Snow Avalanche Protection Forests in Caykara-Trabzon (NE-Turkey). Forestist 2021, 72, 62–72. [Google Scholar] [CrossRef]
- Soteres, R.L.; Pedraza, J.; Carrasco, R.M. Snow avalanche susceptibility of the Circo de Gredos (Iberian Central System, Spain). J. Maps 2020, 16, 155–165. [Google Scholar] [CrossRef]
- Rakhymberdina, M.; Levin, E.; Daumova, G.; Bekishev, Y.; Assylkhanova, Z.; Kapasov, A. Combined Remote Sensing and GIS Methods for Detecting Avalanches in Eastern Kazakhstan. ES Energy Environ. 2024, 26, 1350. [Google Scholar] [CrossRef]
- Denissova, N.; Nurakynov, S.; Petrova, O.; Chepashev, D.; Daumova, G.; Yelisseyeva, A. Remote Sensing Techniques for Assessing Snow Avalanche Formation Factors and Building Hazard Monitoring Systems. Atmosphere 2024, 15, 1343. [Google Scholar] [CrossRef]
- Larsen, H.T.; Hendrikx, J.; Slatten, M.S.; Engeset, R.V. Developing nationwide avalanche terrain maps for Norway. Nat. Hazards 2020, 103, 2829–2847. [Google Scholar] [CrossRef]
- Issler, D.; Gauer, P.; Gladitsch Gisnas, K.; Domaas, U. Approaches to Including Climate and Forest Effects in Avalanche Hazard Indication Maps in Norway. In Proceedings of the 20th EGU General Assembly, EGU2018 Conference, Vienna, Austria, 4–13 April 2018. [Google Scholar]
- Choubin, B.; Borji, M.; Mosavi, A.; Sajedi-Hosseini, F.; Singh, V.P.; Shamshirband, S. Snow avalanche hazard prediction using machine learning methods. J. Hydrol. 2019, 577, 123929. [Google Scholar] [CrossRef]
- Bühler, Y.; Bebi, P.; Christen, M.; Margreth, S.; Stoffel, L.; Stoffel, A.; Marty, C.; Schmucki, G.; Caviezel, A.; Kühne, R.; et al. Automated avalanche hazard indication mapping on a statewide scale. Nat. Hazards Earth Syst. Sci. 2022, 22, 1825–1843. [Google Scholar] [CrossRef]
- Kumar, S.; Srivastava, P.K.; Snehmani, A. Geospatial Modelling and Mapping of Snow Avalanche Susceptibility. J. Indian Soc. Remote 2018, 46, 109–119. [Google Scholar] [CrossRef]
- Dewali, S.K.; Joshi, J.C.; Ganju, A.; Snehmani, A. GPS-based real-time avalanche path warning and navigation system. Geomat. Nat. Haz. Risk 2014, 5, 56–80. [Google Scholar] [CrossRef]
- Singh, D.K.; Gusain, H.S.; Mishra, V.D.; Gupta, N. Avalanche Hazard Mitigation in Western & Central Himalaya-II; Technology Focus, Metcalfe House: Delhi, India, 2019; Volume 27, pp. 4–23. [Google Scholar]
- Xi, N.; Me, G. Avalanche susceptibility mapping by investigating spatiotemporal characteristics of snow cover based on remote sensing imagery along the Pemo Highway-a critical transportation road in Tibet, China. Water 2023, 15, 2743. [Google Scholar] [CrossRef]
- Buser, O. Two Years Experience of Operational Avalanche Forecasting using the Nearest Neighbours Method. Ann. Glaciol. 1989, 13, 31–34. [Google Scholar] [CrossRef]
- Christen, M.; Bartelt, P.; Gruber, U. AVAL-1D: An avalanche dynamics program for the practice. In Proceedings of the International Congress Interpraevent, Pacific Rim, Matsumoto, Japan, 14–18 October 2002; pp. 715–725. [Google Scholar]
- Sampl, P.; Zwinger, T. Avalanche simulation with SAMOS. Ann. Glaciol. 2004, 38, 393–398. [Google Scholar] [CrossRef]
- Christen, M.; Kowalski, J.; Bartelt, P. RAMMS: Numerical simulation of dense snow avalanches in three-dimensional terrain. Cold Reg. Sci. Technol. 2010, 63, 1–14. [Google Scholar] [CrossRef]
- Singh, D.K.; Mishra, V.D.; Gusain, H.S. Simulation and Analysis of a Snow Avalanche Accident in Lower Western Himalaya, India. J. Indian Soc. Remote 2020, 48, 1555–1565. [Google Scholar] [CrossRef]
- Eckerstorfer, M.; Vickers, H.; Malnes, E.; Grahn, J. Near-Real Time Automatic Snow Avalanche Activity Monitoring System Using Sentinel-1 SAR Data in Norway. Remote Sens. 2019, 11, 2863. [Google Scholar] [CrossRef]
- Bühler, Y.; Hafner, E.D.; Zweifel, B.; Zesiger, M.; Heisig, H. Where are the avalanches? Rapid SPOT6 satellite data acquisition to map an extreme avalanche period over the Swiss Alps. Cryosphere 2019, 13, 3225–3238. [Google Scholar] [CrossRef]
- Hafner, E.D.; Techel, F.; Leinss, S.; Bühler, Y. Mapping avalanches with satellites—Evaluation of performance and completeness. Cryosphere 2021, 15, 983–1004. [Google Scholar] [CrossRef]
- Caiserman, A.; Sidle, R.C.; Gurung, D.R. Snow Avalanche Frequency Estimation (SAFE): 32 years of monitoring remote avalanche depositional zones in high mountains of Afghanistan. Cryosphere 2022, 16, 3295–3312. [Google Scholar] [CrossRef]
- Eckerstorfer, M.; Grahn, J. Snow Avalanche Detection Using Sentinel-1 in Langtang, Nepal; NORCE Norwegian Research Centre: Bergen, Norway, 2021; ISBN 978-82-8408-179-3. [Google Scholar]
- Karas, A.; Karbou, F.; Giffard-Roisin, S.; Durand, P.; Eckert, N. Automatic Color Detection-Based Method Applied to Sentinel-1 SAR Images for Snow Avalanche Debris Monitoring. IEEE T. Geosci. Remote 2022, 60, 5219117. [Google Scholar] [CrossRef]
- Yang, J.; He, Q.; Liu, Y. Winter–Spring Prediction of Snow Avalanche Susceptibility Using Optimisation Multi-Source Heterogeneous Factors in the Western Tianshan Mountains, China. Remote Sens. 2022, 14, 1340. [Google Scholar] [CrossRef]
- Lukichev, S.V.; Lyubin, A.N.; Zvonareva, S.V. Modeling of Snow Slope and Snow Cover to Assess Avalanche Hazard. Her. Kola Sci. Cent. RAS 2016, 2, 52–59. [Google Scholar]
- Blagoveshchenskiy, V.; Myrzakhmetov, M.; Sadvakasov, E. Scientific Foundations of the Organization of Remote Monitoring of Avalanche Hazards in the Alatau Ile. Institute of Geography of the Ministry of Education and Science of the Republic of Kazakhstan, Kazntu Named After Satpayev [Electronic Resource]. Available online: https://чс-ник.kz/opasnosti/sel/item/760-nauchnye-osnovy-organizatsii-distantsionnogo-monitoringa-lavinnoj-opasnosti-v-ile-alatau (accessed on 27 April 2025).
- Sensalpin Avalanche Warnings, Lawinenwarnung-Schneemeteorologie [Electronic Resource]. Available online: https://www.sensalpin.ch/anwendungen/lawinenwarnung/ (accessed on 27 April 2025).
- Alpine Automated Weather Instrumentation [Electronic Resource]. Available online: https://www.campbellsci.co.uk/alpine-weather (accessed on 27 April 2025).
- Mayer, S.; van Herwijnen, A.; Ulivieri, G.; Schweizer, J. Evaluating the performance of an operational infrasound avalanche detection system at three locations in the Swiss Alps during two winter seasons. Cold Reg. Sci. Technol. 2020, 173, 102962. [Google Scholar] [CrossRef]
- Stephane, L. BAFU: SilvaProtect-CH: Prozessmodellierung, Anhang 1; Federal Office for the Environment FOEN: Bern, Switzerland, 2013; 74p. [Google Scholar]
- Avalanche Radar of the Geopraevent Company [Electronic Resource]. Available online: https://www.geopraevent.ch/technologies/avalanche-radar/?lang=en (accessed on 27 April 2025).
- Snowburst Software and Hardware Complex [Electronic Resource]. Available online: https://skyward.cc/snowburst (accessed on 27 April 2025).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| № | Country | Reference | Data | Methods/Models of Data Processing | Visualization | Automation |
|---|---|---|---|---|---|---|
| 1 | France | [1] | Three sets of data: an avalanche chronicle (Enquête Permanente sur les Avalanches, EPA), avalanche maps (Carte de Localization des Phénomènes d’Avalanche, CLPA) and a collection of data on hazards for human settlements. | Statistical methods | Geographic Information Systems (GIS) | no |
| 2 | China | [2] | Remote sensing and detailed field survey data. | Statistical methods combined with two machine learning models: logistic regression and multi-layered perceptron. | GIS | no |
| 3 | Northern Norway | [5] | Sentinel-1 satellite images for five years | Statistical methods for processing satellite images | GIS | no |
| 4 | Austria | [6] | Earth remote sensing data. | Processing video streams from webcams using a deep learning module | GIS | no |
| 5 | Austria | [7] | Distributed acoustic sensing data based on fiber-optic telecommunication cables | Statistical methods and machine learning methods | no | Automatic notification |
| 6 | Switzerland | [40] | The Silva Protect-CH project. Digital terrain models (DEM) with a resolution of 25 m | Numerical simulation of avalanches AVRIL-2D. | no | no |
| 7 | Switzerland | [37,38] | Data from automated snow and wind measuring stations (150 stations). | Statistical methods | - | Automatic notification |
| 8 | Italy | [8] | Data from automated measurement stations based on the use of infrasound waves. | A methodology for estimating threshold criteria for sources of infrasound waves and determining possible avalanches based on them. | - | Automatic notification |
| 9 | Türkiye | [10,11] | Digital terrain models (DEM) with a resolution of 10 m. | Numerical simulation of avalanches. | GIS | no |
| 10 | Russia | [35] | Data on slope parameters (slope topology) and meteorological indicators of snow cover stability in avalanche-prone locations. | Three-dimensional cellular model of snow accumulation (numerical modeling). | no | Automatic notification |
| 11 | Russia | [41] | AVYX® radar data continuously scans slopes. | Statistical methods | no | Automatically sends a signal to any device |
| 12 | Russia | [42] | The Snow burst software and hardware complex. Meteorological data and snow cover temperature data. | Graph-analytical data processing platform and statistical data processing. | Grafana | Support and decision-making system |
| № | Name | Description | Selection Criteria or Important Characteristics |
|---|---|---|---|
| 1 | Ser[LOG] Plus | Ser[LOG]—Data Logger is a device designed to record, store and analyze data coming from various sensors, detectors or external sources. Power consumption: 10-30V DC. Interface: 5 × RS 485; 6 × RS 422; 4 × RS 232; USB-Device; USB-Host; Ethernet. Supported protocols: SDI-12, Modbus RTU, Modbus TCP, NMEAData sending protocols: HTTPS, MQTT. | The presence of analog inputs (for anemometers with a current loop), digital inputs, the ability to connect a communication module (the presence of an Ethernet port). |
| 2 | Wind sensor DBM-6410 (Magnetoelectric wind sensor) | The DBM-6410 wind sensor is used to measure air flow speed and wind direction. It is designed for autonomous operation or as part of meteorological stations and complexes. The DBM-6410 is indispensable for work in the field of climate measurements, meteorology, hydrology, ecology and other services. Protocols: Modbus-RTU, NMEA-0183. | The presence of an analog or digital output (RS485 + ARMY, CAR, NMEA protocol stack). Resistance to harsh weather conditions, resistant to icing. |
| 3 | Temperature-Humidity-Pressure Sensor THP[pro] | A multifunctional device designed to measure temperature, humidity and atmospheric pressure. This sensor is used in various applications, including environmental monitoring, climate control systems, smart buildings, weather stations and other areas where accurate measurement of these parameters is required. Protocols: SDI-12, NMEA, Modbus. | Operation using the SDI-12 protocol, the ability to configure for Modbus. Measurement of all 3 parameters at once, the presence of a digital output. Shelter, for protection from external influences. |
| 4 | Solar panel OSDA Solar 380M ODA380-30-MH (Half-Cell) | Monocrystalline solar panel. Quality class Grade A, Maximum power (P max)—380 W. Operating temperature range, °C—from −40 to +85 | Matching the power consumption. |
| 5 | Battery VEKTOR GPL 12-75 | Battery type—AGM, Battery capacity (C20), Ah—75, Nominal voltage-battery, V—12, Internal resistance, mOhm—6, Self-discharge, %—3, Terminal type—Under bolt Mb (Tb, T7, T13, B4, B5), Maximum charging current—22.5 A, Maximum discharge current—750 A, Discharge temperature range, °C—from −20 to +60 | Stable operation at low temperatures. Matching the power consumption. |
| 6 | SRNE SR-ML2420 MPPT Solar Charge Controller | MPPT solar charge controller for 20 A, designed for 12/24 V photovoltaic systems. Maximum solar panel power is 260/520 W. The controller optimizes the charging process, preventing battery overcharging. | Stable operation at low temperatures. |
| 7 | Automatic switch VA 47-29 | They are designed to protect distribution and group circuits with different loads. | Stable operation at low temperatures. |
| 8 | Time relay 12-240V AC/DC IEK | Designed for automatic switching on of electrical equipment with a delay after the switching command is given. | Stable operation at low temperatures. |
| 9 | LTE/Wi-Fi router iRZ RL25w | 4G router with 2 SIM cards for automation systems with RS-232 and RS-485 interfaces, 4 LAN ports, 15 GPIO pins and built-in Wi-Fi. The multifunctional iRZ RL25w router is designed to transmit data over cellular networks. | Stable operation at low temperatures. |
| 10 | Outdoor all-weather cabinet 12U | Designed to accommodate autonomously functioning active and passive equipment, maintaining a specified temperature regime inside the cabinet during operation | Tightness, thermal insulation, preventing unauthorized access. |
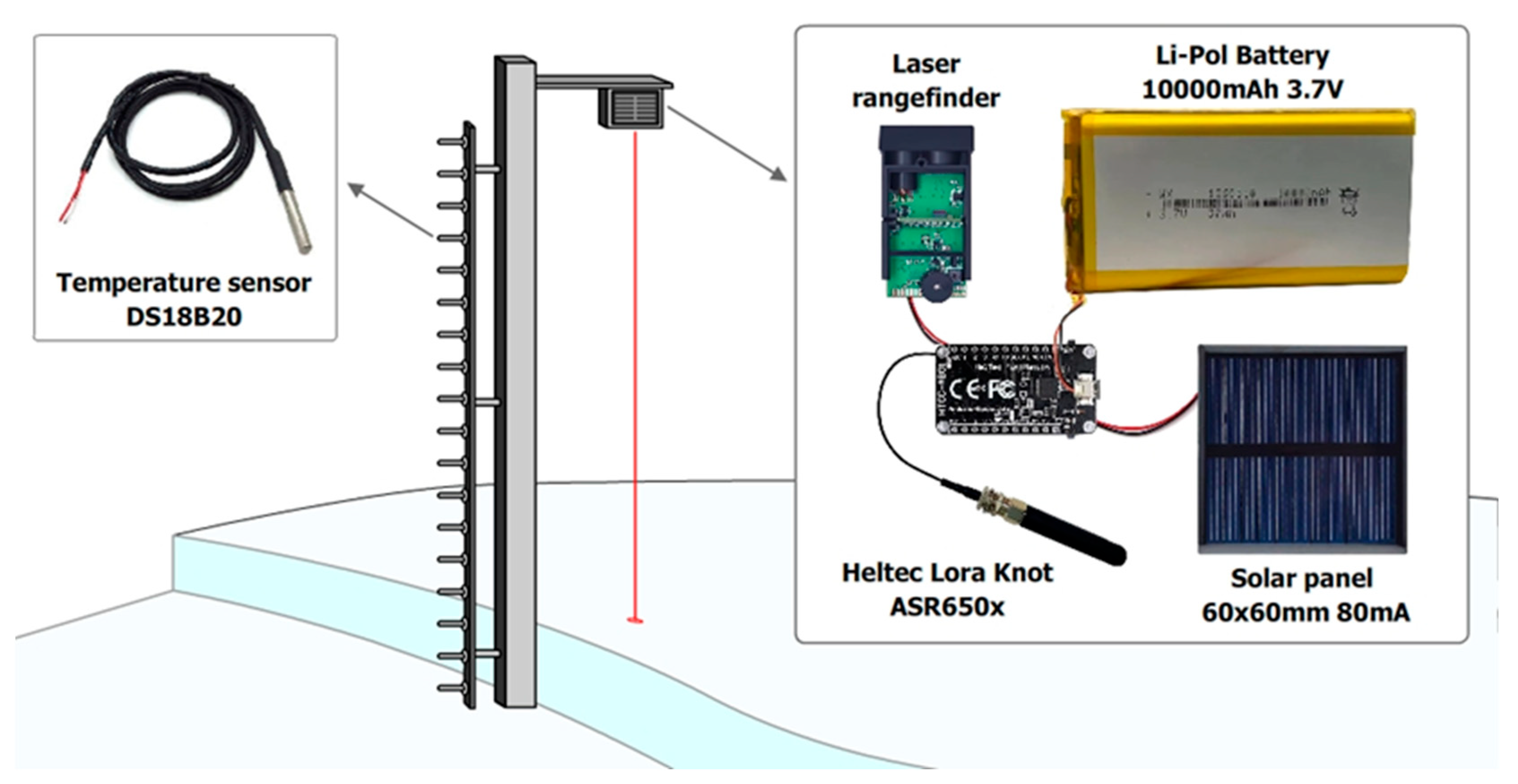
| 11 | DC-DC converter | To ensure stable power supply for the Heltec LoRa 32 microcontroller integrated into the monitoring system, a DC-DC converter is used to reduce the voltage from 12 V supplied by the battery to 5 V. | Stable operation at low temperatures. |
| 12 | Antenna mast structure | A truss mast is a set of 3 m long aluminum sections with a triangular cross-section. Truss mast structures are used to use heavy-duty attachments, and can withstand extreme weather conditions such as strong winds, snow loads, and temperature fluctuations, which is extremely important in mountainous conditions. | Lightweight, prefabricated construction. |
| import socket import ssl from struct import pack, unpack, unpack_from def send_via_ssl_socket(packet: bytes): HOST, PORT = “ApiHost”, 0001 sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM) sock.settimeout(10) sock.connect((HOST, PORT)) sock.send(packet.encode(“utf-8”)) sock.close() ssock = socket.socket(socket.AF_INET, socket.SOCK_STREAM) ssock.bind((“0.0.0.0”, 5000)) ssock.listen() try: while True: | con, addr = ssock.accept() packet = con.recv(1024).decode().replace(“Host: 192.168.1.11:5000”, “Host: ApiHost:0001”) con.send( “““HTTP/1.1 200 OK Server: Werkzeug/3.0.1 Python/3.10.12 Date: Wed, 04 Dec 2024 07:00:46 GMT Content-Type: text/html; charset=utf-8 Content-Length: 4 Connection: close true””” .encode(“utf-8”) ) send_via_ssl_socket(packet) except KeyboardInterrupt: ssock.close() |
| #include “LoRaWan_APP.h” #include “Arduino.h” #include “softSerial.h” #include <OneWire.h> #include <DallasTemperature.h> #include <Regexp.h>— #define ONE_WIRE_BUS GPIO4 OneWire oneWire(ONE_WIRE_BUS); DallasTemperature sensors(&oneWire); int deviceCount = 0; float tempC; char txpacket[BUFFER_SIZE]; char rxpacket[BUFFER_SIZE]; static RadioEvents_t RadioEvents; float txNumber; bool lora_idle=true; const String UID = “t1”; softSerial ss(GPIO5, GPIO0); String query_laser() { ss.begin(19200); String distance; while(true) { ss.write(‘D’); distance = ss.readString(); MatchState ms; char c_dist[50]; distance.toCharArray(c_dist, sizeof(c_dist)); ms.Target(c_dist); if(ms.Match(“(([0-9]\.[0-9]+\m\,[0-9]+))”) > 0) { Serial.println(“Got normal reading”); Serial.println(distance); distance = distance.substring(distance.indexOf(‘ ’), distance.length() - 1); break; } } ss.end(); | return distance; } String ds18b20_query(){ String result = ““; sensors.begin(); deviceCount = sensors.getDeviceCount(); if (deviceCount > 0){ sensors.requestTemperatures(); for (int i = 0; i < deviceCount; i++) { tempC = sensors.getTempCByIndex(i); result += (String)(i+1) + “:” + (String)tempC + “;”; } } return result; } void loop() { if(lora_idle == true) { digitalWrite(Vext, LOW); String temperatures = ds18b20_query(); Serial.println(temperatures); txNumber += 0.01; String distance = query_laser(); distance.trim(); String voltage = (String)((float)getBatteryVoltage() / 1000.0); turnOnRGB(COLOR_SEND,0); Radio.Send( (uint8_t *)txpacket, strlen(txpacket) ); lora_idle = false; delay(900000); } } void OnTxDone( void ) { turnOffRGB(); lora_idle = true; } void OnTxTimeout( void ) { turnOffRGB(); Radio.Sleep( ); lora_idle = true; } |
| #define HELTEC_POWER_BUTTON #include <heltec_unofficial.h> #include <WiFi.h> #include <HTTPClient.h> #include <SoftwareSerial.h> #include <base64.h> SoftwareSerial ss(41,); String identifier = “id”; // Change this for each new base station const char* ssid = “net”; const char* password = “pass”; String target_url = “url”; String api_key = “apikey”; volatile bool rxFlag = false; long counter = 0; uint64_t last_tx = 0; uint64_t tx_time; uint64_t minimum_pause; String base64_output; String query_laser() { ss.begin(19200); ss.write(‘D’); String distance = ss.readString(); ss.end(); return distance; } void send_post_request(String packet) { if (WiFi.status() != WL_CONNECTED) { WiFi.disconnect(); WiFi.reconnect(); } if(WiFi.status() == WL_CONNECTED) { WiFiClient client; HTTPClient http; http.begin(target_url); | http.addHeader(“Content-Type”, “application/json”); http.addHeader(“Api-Key”, api_key); int httpResponseCode = http.POST(“{\”packet\”:\”“ + (String)packet + “\”}”); http.end(); } } void loop() { heltec_loop(); String rxdata; if (rxFlag) { rxFlag = false; radio.readData(rxdata); if (_radiolib_status == RADIOLIB_ERR_NONE) { laser_data.trim(); String packet = (String)”BEG “ + (String)”IB: “ + (String)identifier + “;” + (String)rxdata + “BD:” + laser_data + “ END” ; base64_output = base64::encode(packet); send_post_request(base64_output); } RADIOLIB_OR_HALT(radio.startReceive (RADIOLIB_SX126X_RX_TIMEOUT_INF)); } } void rx() { rxFlag = true; } |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Denissova, N.; Petrova, O.; Mashayev, E.; Spivak, D.; Zuyev, V.; Daumova, G. Real-Time Avalanche Hazard Monitoring System Based on Weather Sensors and a Laser Rangefinder. Sensors 2025, 25, 2937. https://doi.org/10.3390/s25092937
Denissova N, Petrova O, Mashayev E, Spivak D, Zuyev V, Daumova G. Real-Time Avalanche Hazard Monitoring System Based on Weather Sensors and a Laser Rangefinder. Sensors. 2025; 25(9):2937. https://doi.org/10.3390/s25092937
Chicago/Turabian StyleDenissova, Natalya, Olga Petrova, Erbolat Mashayev, Dmitry Spivak, Vitaly Zuyev, and Gulzhan Daumova. 2025. "Real-Time Avalanche Hazard Monitoring System Based on Weather Sensors and a Laser Rangefinder" Sensors 25, no. 9: 2937. https://doi.org/10.3390/s25092937
APA StyleDenissova, N., Petrova, O., Mashayev, E., Spivak, D., Zuyev, V., & Daumova, G. (2025). Real-Time Avalanche Hazard Monitoring System Based on Weather Sensors and a Laser Rangefinder. Sensors, 25(9), 2937. https://doi.org/10.3390/s25092937