Dual Interferometric Interrogation for DFB Laser-Based Acoustic Sensing


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. DFB Laser-Based Acoustic Sensing System
2.1. Interrogation of Acoustic Induced Frequency Deviations
2.2. Operating Principle of the Interrogator
3. Dual Interferometric Approach
3.1. System Architecture
3.2. Time Domain Measuremements
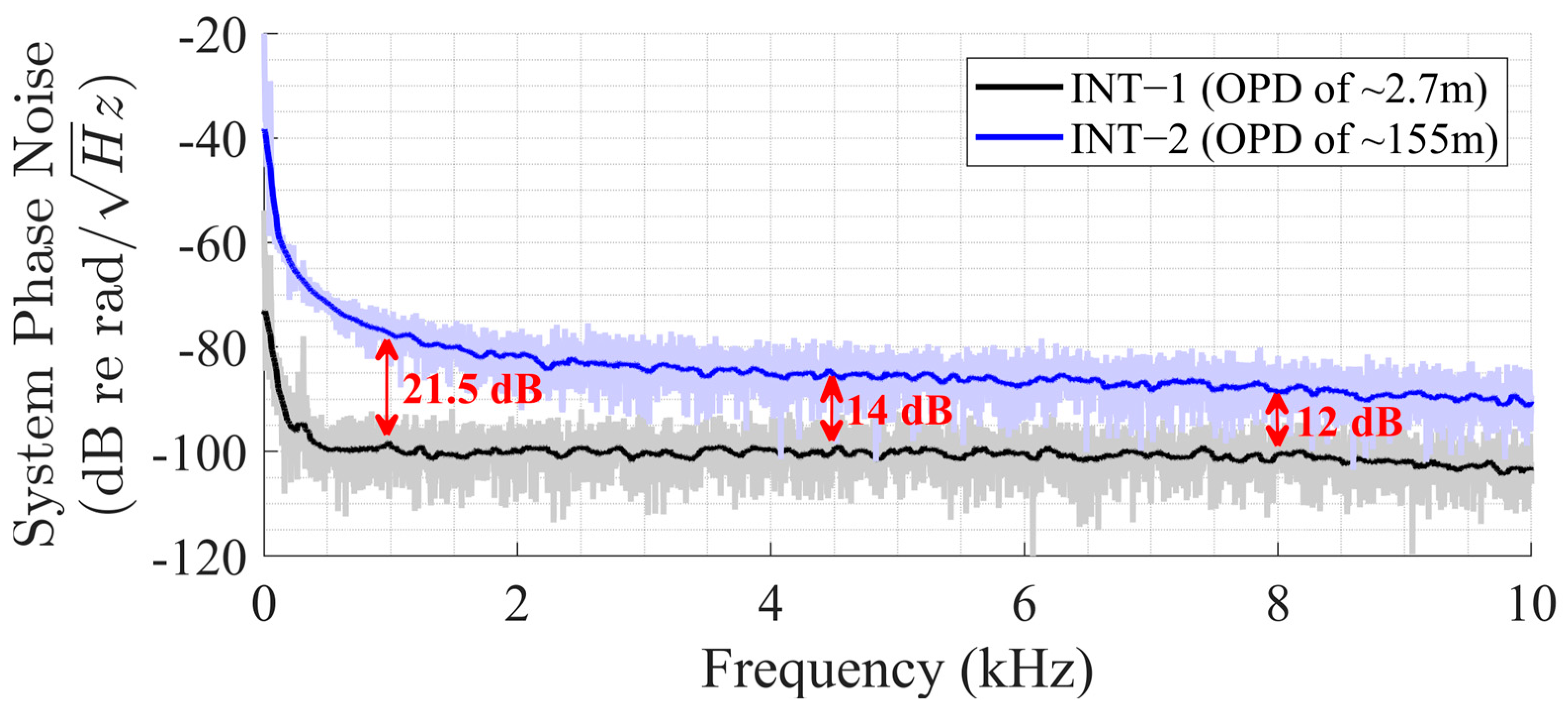
3.3. System Noise Floor Characterization
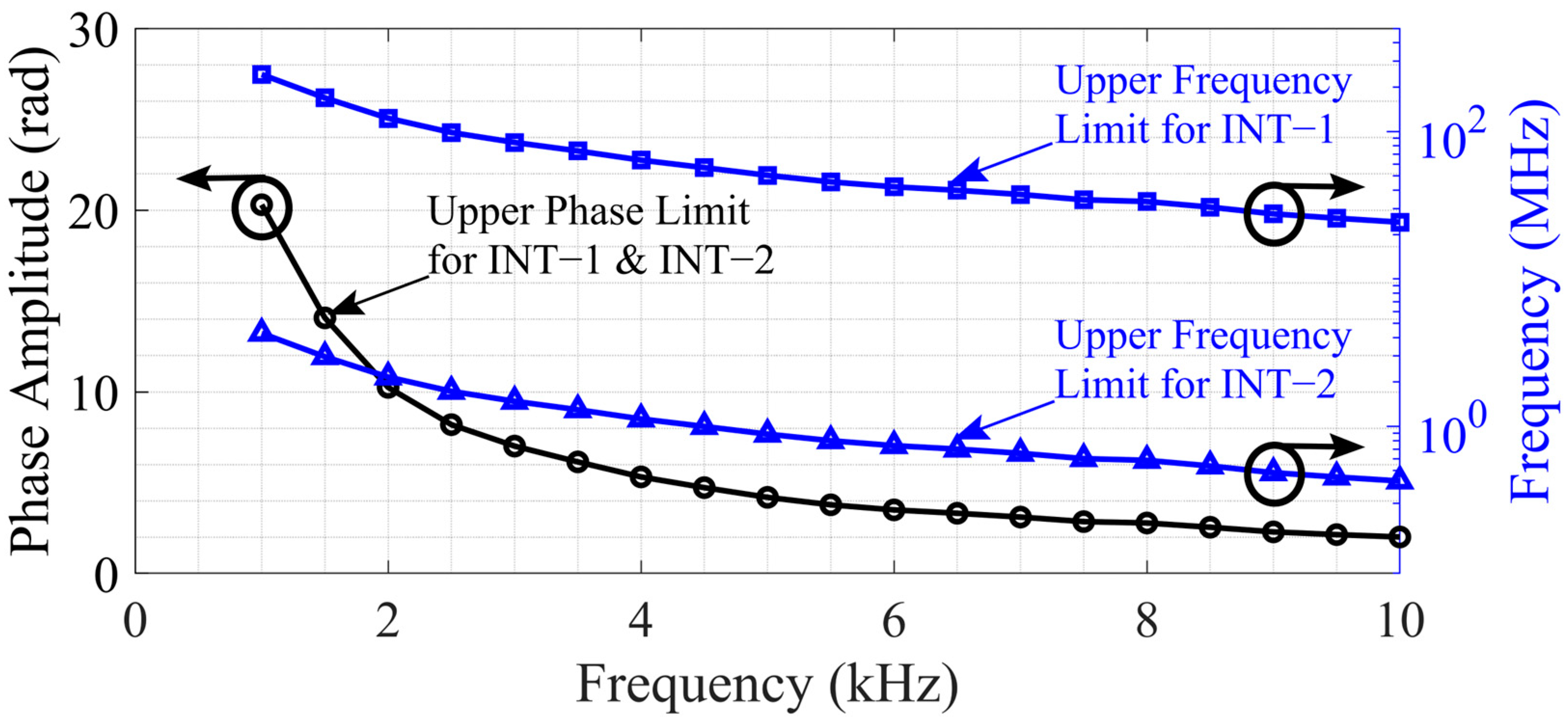
3.4. Upper Limit Characterization
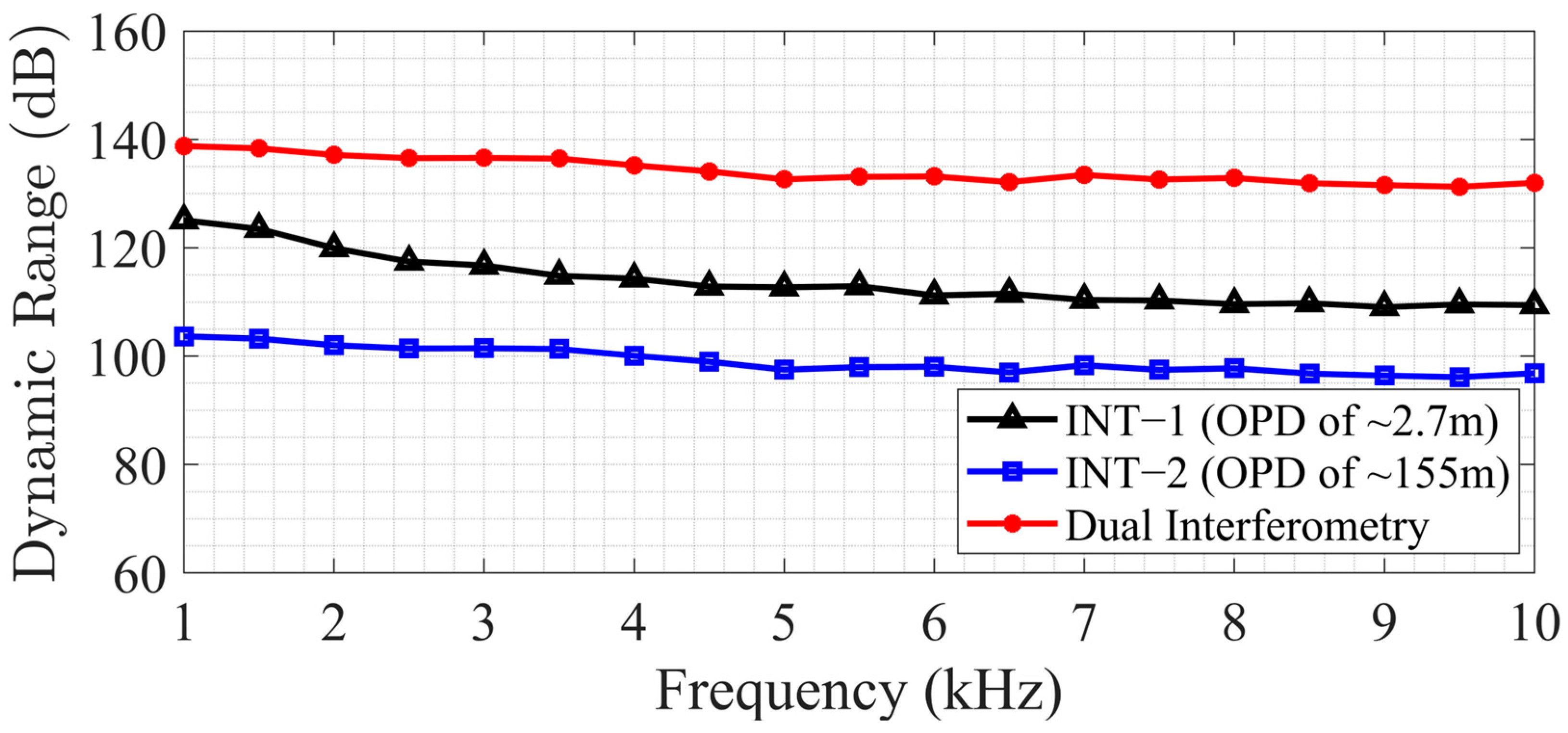
3.5. Results
3.6. Comparison
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bai, Y.; Lu, L.; Cheng, J.; Liu, J.; Chen, Y.; Yu, J. Acoustic-based sensing and applications: A survey. Comput. Netw. 2020, 181, 107447. [Google Scholar] [CrossRef]
- Saheban, H.; Kordrostami, Z. Hydrophones, fundamental features, design considerations, and various structures: A review. Sens. Actuators A-Phys. 2021, 329, 112790. [Google Scholar] [CrossRef]
- Pallayil, V. Ceramic and fibre optic hydrophone as sensors for lightweight arrays—A comparative study. In Proceedings of the OCEANS 2017-Anchorage, Anchorage, AK, USA, 18–21 September 2017; pp. 1–13. [Google Scholar]
- Bucaro, J.A.; Dardy, H.D.; Carome, E.F. Fiber-optic hydrophone. J. Acoust. Soc. Am. 1977, 62, 1302–1304. [Google Scholar] [CrossRef]
- Bao, X.; Zhou, D.-P.; Baker, C.; Chen, L. Recent Development in the Distributed Fiber Optic Acoustic and Ultrasonic Detection. J. Light. Technol. 2017, 35, 3256–3267. [Google Scholar] [CrossRef]
- Foster, S. How sensitive is distributed acoustic sensing? In Proceedings of the Seventh European Workshop on Optical Fibre Sensors, Limassol, Cyprus, 28 August 2019; SPIE: Bellingham, WA, USA, 2019; p. 115. [Google Scholar] [CrossRef]
- Chang, H.-Y.; Kuo, C.-Y.; Wang, T.-L.; Chang, Y.-C.; Fu, M.-Y.; Liu, W.-F. Hydrophone Based on a Fiber Bragg Grating. In Proceedings of the 2018 Progress in Electromagnetics Research Symposium (PIERS-Toyama), Toyama, Japan, 1–4 August 2018; pp. 233–236. [Google Scholar] [CrossRef]
- Kirkendall, C.K.; Dandridge, A. Overview of high performance fibre-optic sensing. J. Phys. D Appl. Phys. 2004, 37, R197–R216. [Google Scholar] [CrossRef]
- Hill, D.J. The evolution and exploitation of the fiber-optic hydrophone. SPIE Proc. 2007, 6619, 661907. [Google Scholar] [CrossRef]
- Zhang, J.; Xiang, Y.; Wang, C.; Chen, Y.; Tjin, S.C.; Wei, L. Recent Advances in Optical Fiber Enabled Radiation Sensors. Sensors 2022, 22, 1126. [Google Scholar] [CrossRef] [PubMed]
- Foster, S.; Tikhomirov, A.; Velzen, J.; Harrison, J. Recent Advances in Fiber Optic Array Technologies. In Proceedings of the Acoustics, Fremantle, Australia, 21–23 November 2012. [Google Scholar]
- Azmi, A.I.; Leung, I.; Chen, X.; Zhou, S.; Zhu, Q.; Gao, K.; Childs, P.; Peng, G. Fiber laser based hydrophone systems. Photonic Sens. 2011, 1, 210–221. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, W.; Xu, T.; He, J.; Zhang, F.; Li, F. Fiber laser sensing system and its applications. Photonic Sens. 2010, 1, 43–53. [Google Scholar] [CrossRef]
- Léguillon, Y.; Tow, K.H.; Besnard, P.; Mugnier, A.; Pureur, D.; Doisy, M. First demonstration of a 12 DFB fiber laser array on a 100 GHz ITU grid, for underwater acoustic sensing application. SPIE Proc. 2012, 8439, 84390J. [Google Scholar] [CrossRef]
- Dandridge, A.; Tveten, A.B.; Giallorenzi, T.G. Homodyne Demodulation Scheme for Fiber Optic Sensors Using Phase Generated Carrier. IEEE Trans. Microw. Theory Tech. 1982, 30, 1635–1641. [Google Scholar] [CrossRef]
- Hou, L.; Peng, F.; Yang, J.; Yuan, Y.; Yan, D.; Wu, B.; Yuan, L. An improved PGC demodulation method to extend dynamic range and compensate low-frequency drift of modulation depth. SPIE Proc. 2015, 9634, 96345Y. [Google Scholar] [CrossRef]
- Plotnikov, M.J.; Kulikov, A.V.; Strigalev, V.E.; Meshkovsky, I.K. Dynamic Range Analysis of the Phase Generated Carrier Demodulation Technique. Adv. Opt. Technol. 2014, 2014, 815108. [Google Scholar] [CrossRef]
- Kumar, S.S.; Khansa, C.A.; Praveen, T.V.; Sreehari, C.V.; Santhanakrishnan, T.; Rajesh, R. Assessment of Dynamic Range in Interferometric Fiber Optic Hydrophones Based on Homodyne PGC Interrogator. IEEE Sens. J. 2020, 20, 13418–13425. [Google Scholar] [CrossRef]
- Kringlebotn, J.T.; Archambault, J.-L.; Reekie, L.; Payne, D.N. Er3+:Yb3+-codoped fiber distributed-feedback laser. Opt. Lett. 1994, 19, 2101. [Google Scholar] [CrossRef] [PubMed]
- Foster, S. Dynamical noise in single-mode distributed feedback fiber lasers. IEEE J. Quantum Electron. 2004, 40, 1283–1293. [Google Scholar] [CrossRef]
- Kumari, C.R.U.; Samiappan, D.K.R.; Sudhakar, T. Fiber optic sensors in ocean observation: A comprehensive review. Optik 2019, 179, 351–360. [Google Scholar] [CrossRef]
- Cekorich, A. Demodulator for interferometric sensors. SPIE Proc. 1999, 3860, 338–347. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, M.; Mao, X.; Liao, Y. The arctangent approach of digital PGC demodulation for optic interferometric sensors. SPIE Proc. 2006, 6292, 62921E. [Google Scholar] [CrossRef]
- Fang, G.; Xu, T.; Li, F. 16-Channel Fiber Laser Sensing System Based on Phase Generated Carrier Algorithm. IEEE Photonics Technol. Lett. 2013, 25, 2185–2188. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Keskin, M.Z.; Yentur, A.; Ozdur, I. Dual Interferometric Interrogation for DFB Laser-Based Acoustic Sensing. Sensors 2025, 25, 2873. https://doi.org/10.3390/s25092873
Keskin MZ, Yentur A, Ozdur I. Dual Interferometric Interrogation for DFB Laser-Based Acoustic Sensing. Sensors. 2025; 25(9):2873. https://doi.org/10.3390/s25092873
Chicago/Turabian StyleKeskin, Mehmet Ziya, Abdulkadir Yentur, and Ibrahim Ozdur. 2025. "Dual Interferometric Interrogation for DFB Laser-Based Acoustic Sensing" Sensors 25, no. 9: 2873. https://doi.org/10.3390/s25092873
APA StyleKeskin, M. Z., Yentur, A., & Ozdur, I. (2025). Dual Interferometric Interrogation for DFB Laser-Based Acoustic Sensing. Sensors, 25(9), 2873. https://doi.org/10.3390/s25092873