

A Monocular Camera as an Operation Logger for Motorized Mobility Scooters: Visual Odometry Method to Estimate Steering and Throttle Angles

Abstract
1. Introduction
2. Materials and Methods
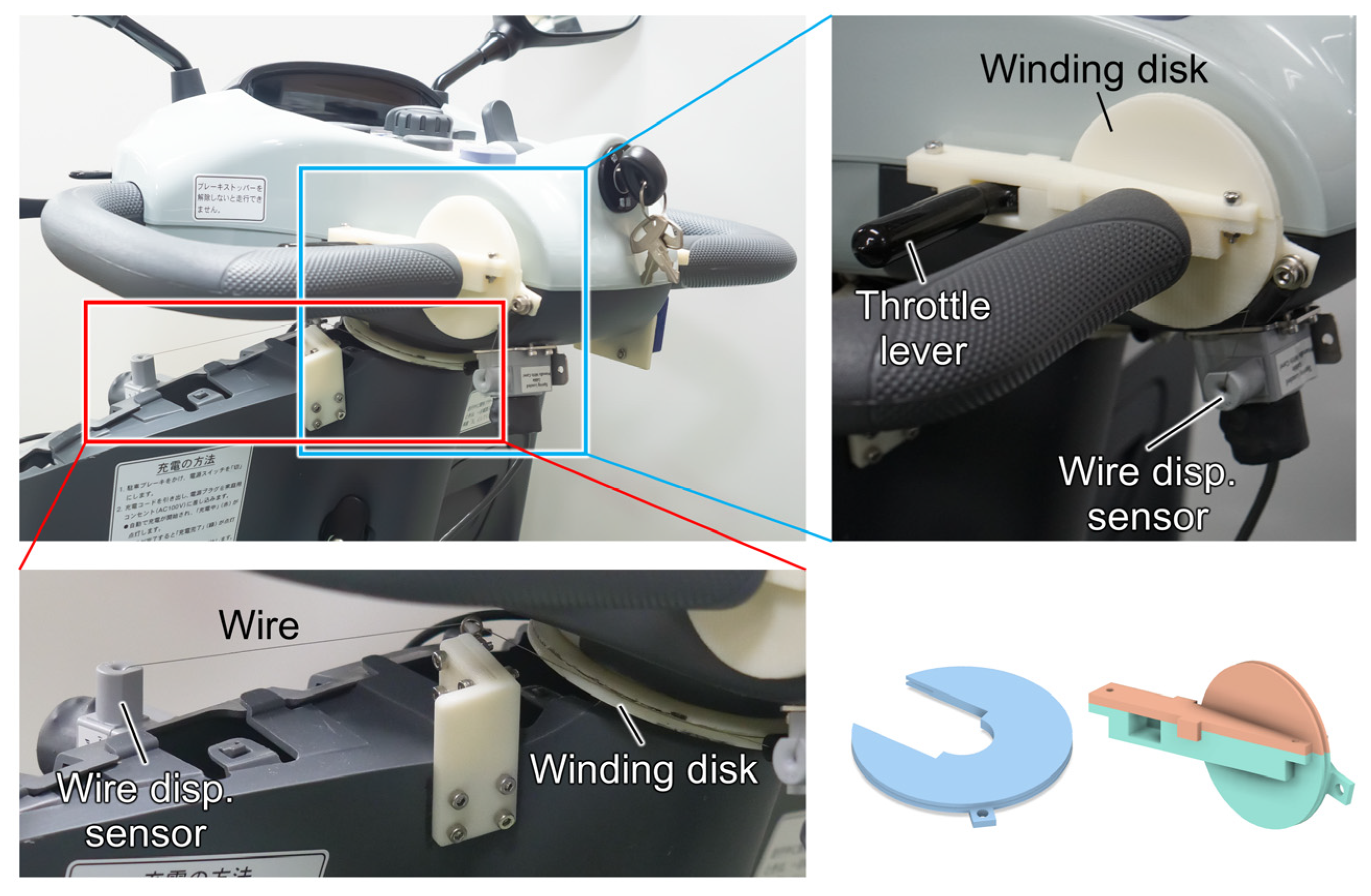
2.1. Operation Logging System
2.2. Monocular Camera Image Processing
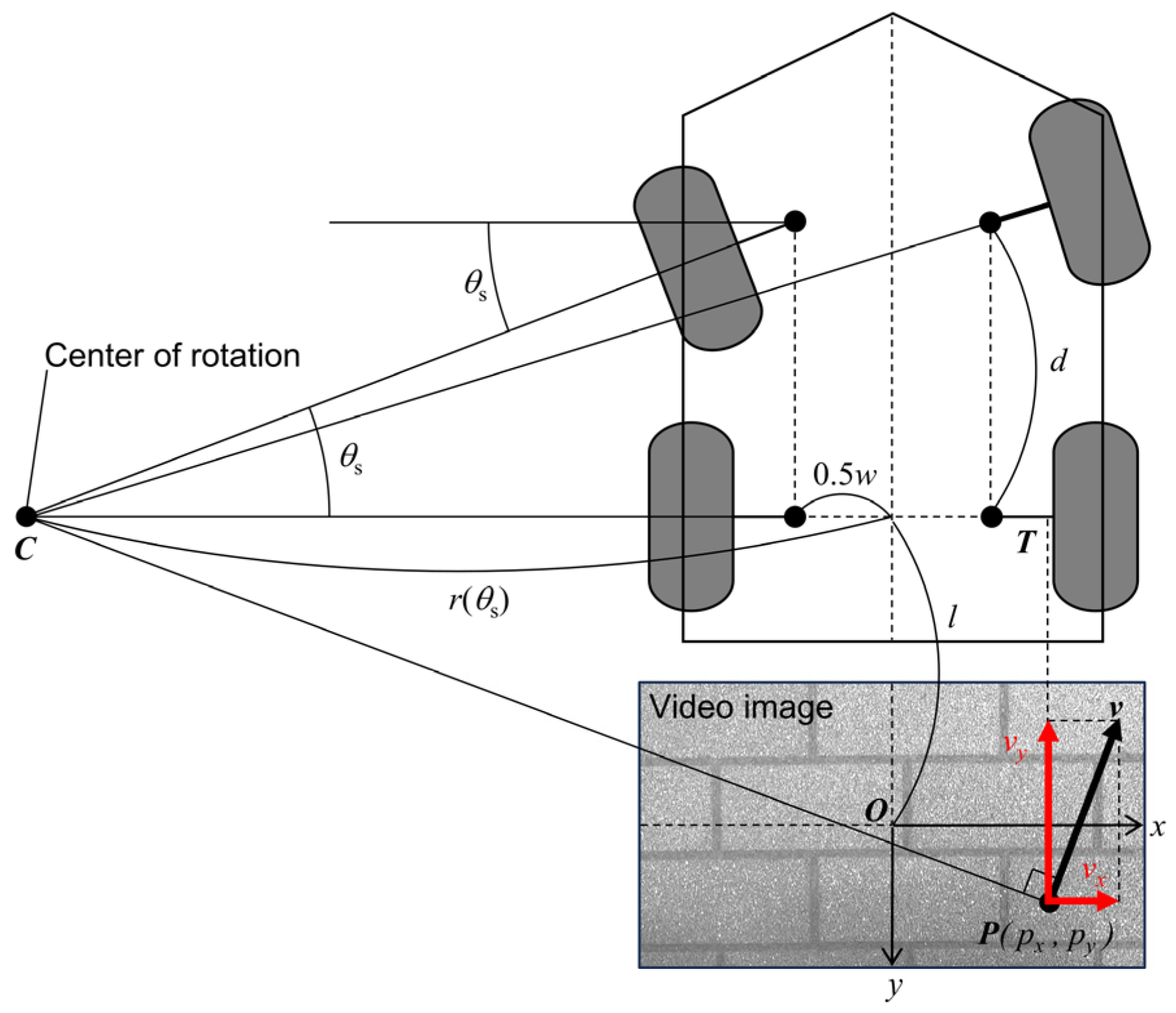
2.3. Geometric Estimation of Driving Operations
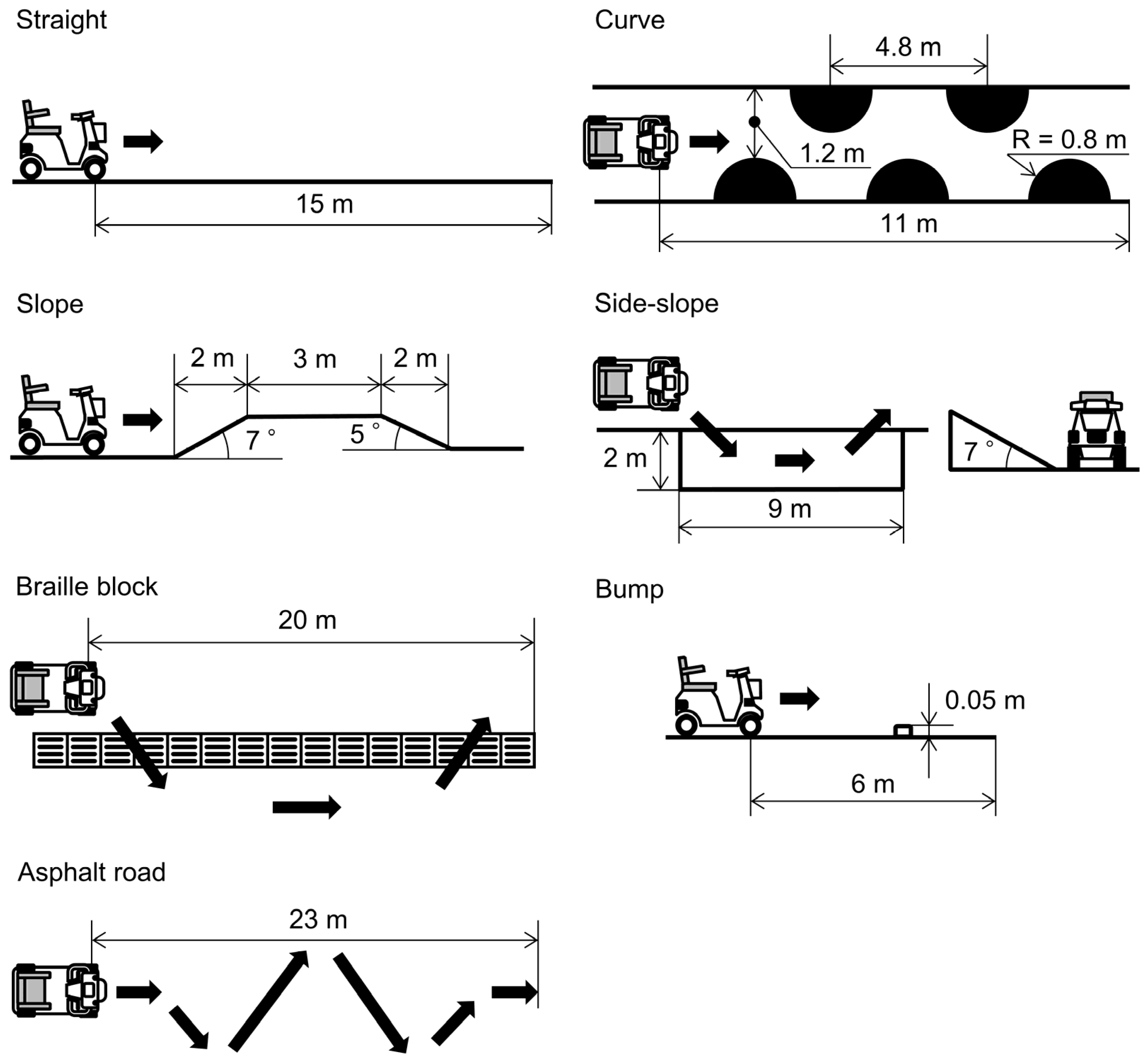
2.4. Experimental Procedures
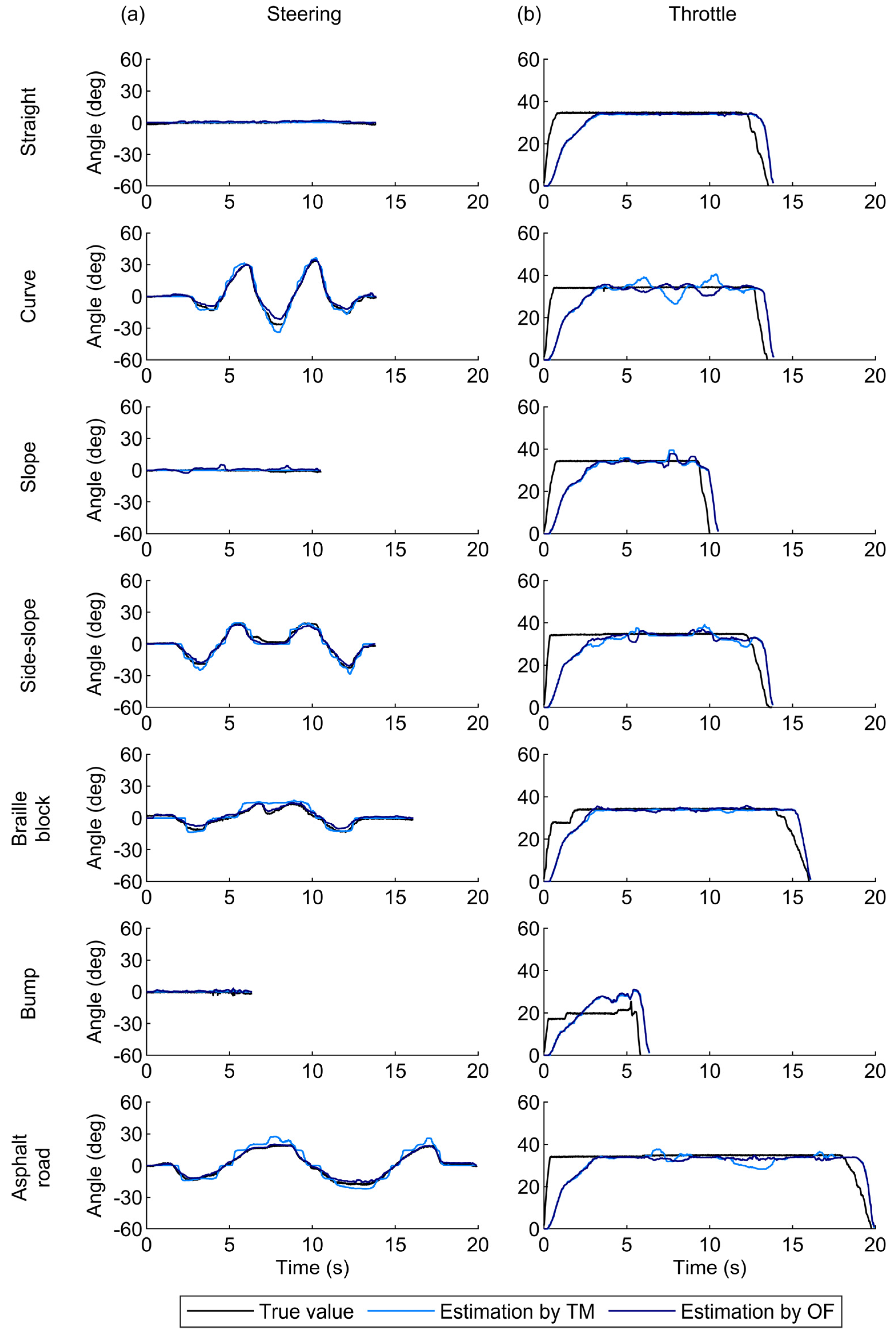
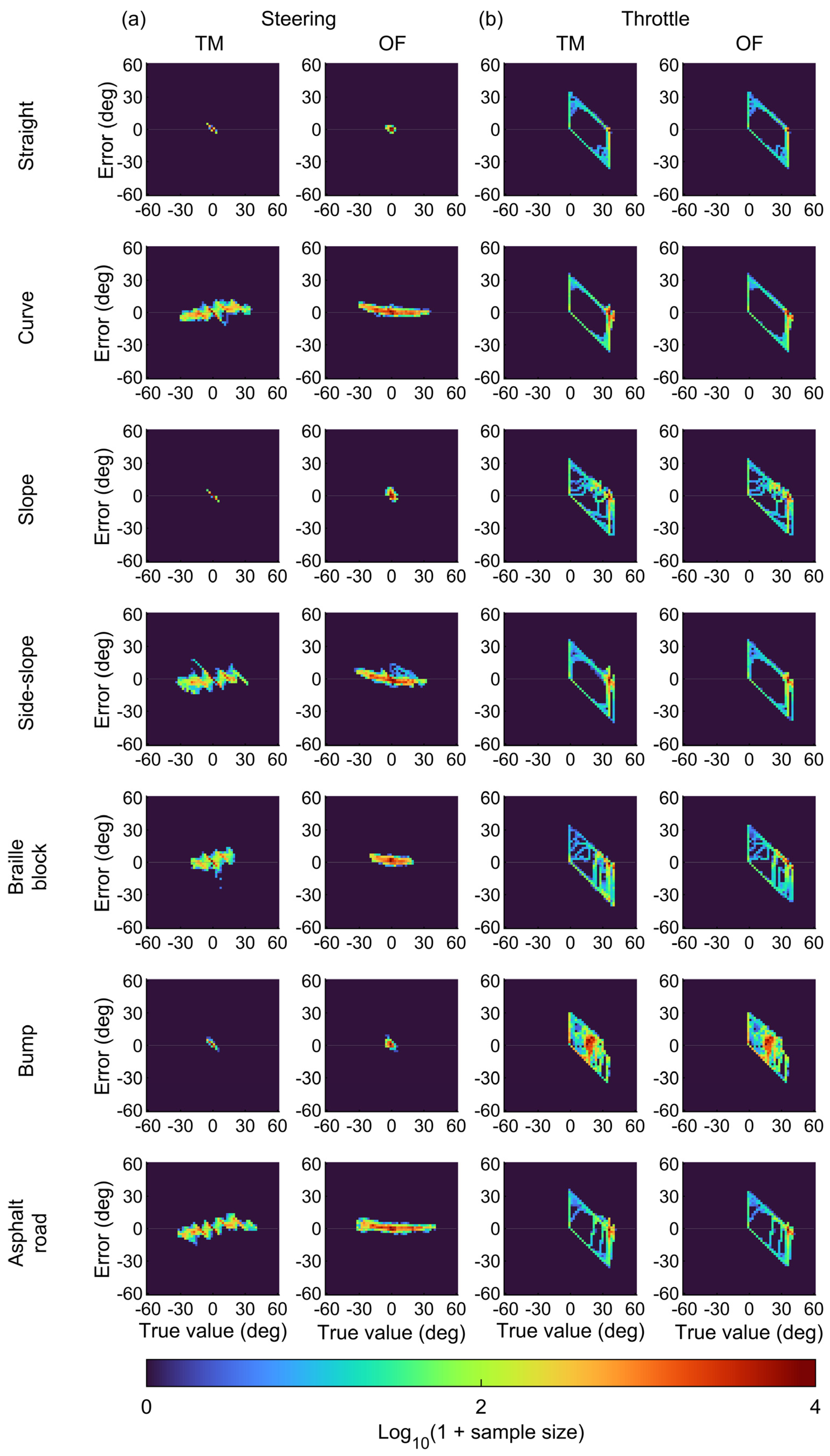
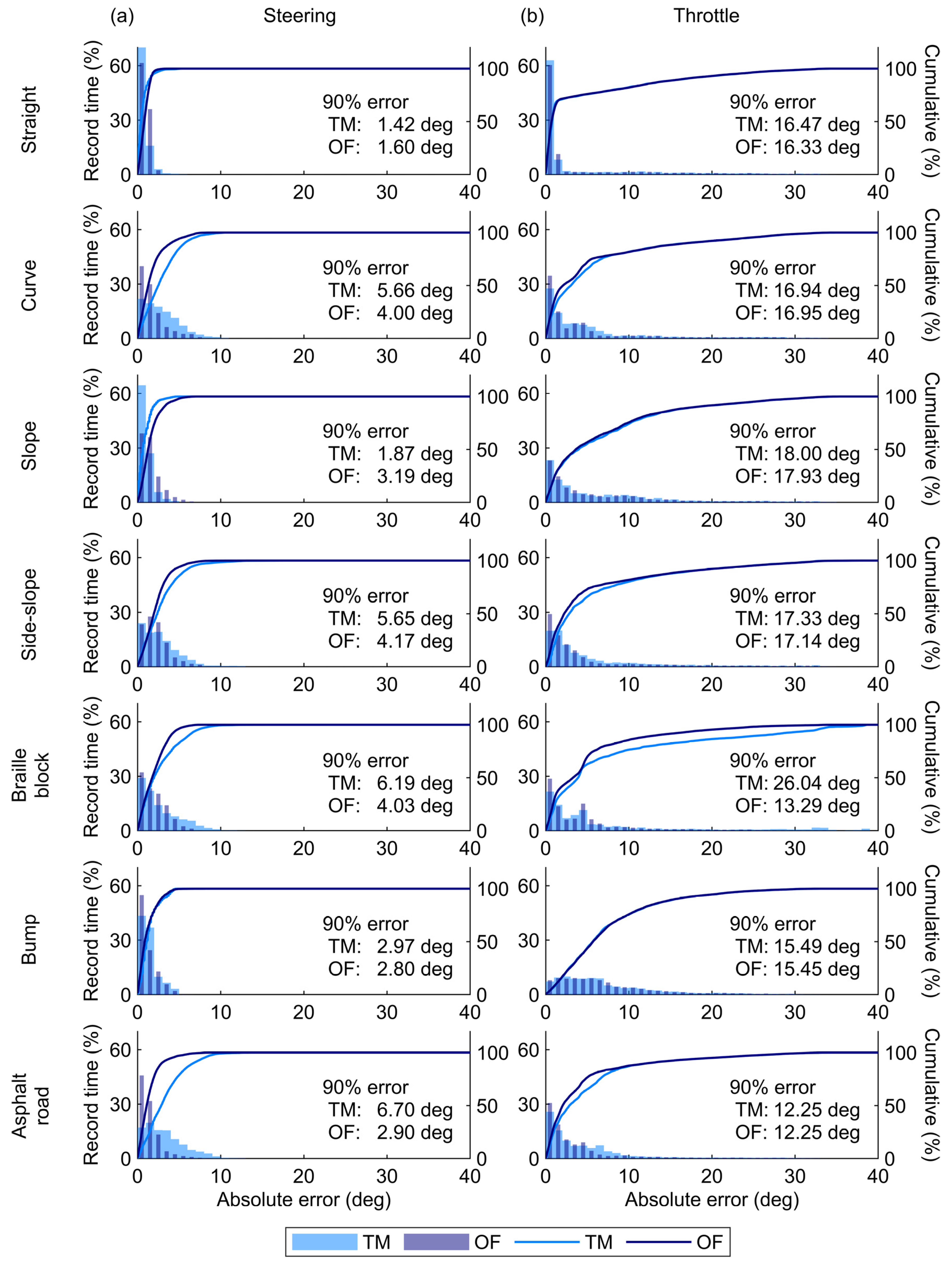
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Metz, D.H. Mobility of older people and their quality of life. Transp. Policy 2000, 7, 149–152. [Google Scholar] [CrossRef]
- Rosso, A.L.; Taylor, J.A.; Tabb, L.P.; Michael, Y.L. Mobility, disability, and social engagement in older adults. J. Aging Health 2013, 25, 617637. [Google Scholar] [CrossRef] [PubMed]
- Pettersson, I.; Hagberg, L.; Fredriksson, C.; Hermansson, L.N. The effect of powered scooters on activity, participation and quality of life in elderly users. Disabil. Rehabil. Assist. Technol. 2016, 11, 558–563. [Google Scholar] [CrossRef]
- Ripat, J.; Verdonck, M.; Carter, R.J. The meaning ascribed to wheeled mobility devices by individuals who use wheelchairs and scooters: A metasynthesis. Disabil. Rehabil. Assist. Technol. 2018, 13, 253–262. [Google Scholar] [CrossRef]
- Fredriksson, C.; Pettersson, I.; Hagberg, L.; Hermansson, L. The value of powered mobility scooters from the perspective of elderly spouses of the users—A qualitative study. Disabil. Rehabil. Assist. Technol. 2022, 17, 747–751. [Google Scholar] [CrossRef]
- Jancey, J.; Cooper, L.; Howat, P.; Meuleners, L.; Sleet, D.; Baldwin, G. Pedestrian and motorized mobility scooter safety of older people. Traffic Inj. Prev. 2013, 14, 647–653. [Google Scholar] [CrossRef]
- Fomiatti, R.; Richmond, J.; Moir, L.; Millsteed, J. A systematic review of the impact of powered mobility devices on older adults’ activity engagement. Phys. Occup. Ther. Geriatr. 2013, 31, 297–309. [Google Scholar] [CrossRef]
- Thoreau, R. The impact of mobility scooters on their users. Does their usage help or hinder?: A state of the art review. J. Transp. Health 2015, 2, 269–275. [Google Scholar] [CrossRef] [PubMed]
- Frank, A.; Neophytou, C.; Frank, J.; de Souza, L. Electric-powered indoor/outdoor wheelchairs (EPIOCs): Users’ views of influence on family, friends and carers. Disabil. Rehabil. Assist. Technol. 2010, 5, 327–338. [Google Scholar] [CrossRef]
- Mortenson, W.B.; Kim, J. Scoping review of mobility scooter-related research studies. J. Rehabil. Res. Dev. 2016, 53, 531–540. [Google Scholar] [CrossRef]
- Bækgaard, E.S.; Christensen, L.; Medici, R.B.; Bulow, H.H. Mobility scooter accidents—Need for preventative action? Clin. Med. Rev. Case Rep. 2017, 4, 158. [Google Scholar] [CrossRef]
- Isaacson, M.; Barkay, D. Mobility scooters in urban environments: A research agenda. J. Transp. Health 2020, 18, 100917. [Google Scholar] [CrossRef]
- Akter, S.; Mamun, M.M.H.; Mwakalonge, J.L.; Comert, G.; Siuhi, S. A policy review of electric personal assistive mobility devices. Transp. Res. Interdiscip. Perspect. 2021, 11, 100426. [Google Scholar] [CrossRef]
- Bigras, C.; Owonuwa, D.D.; Miller, W.C.; Archambault, P.S. A scoping review of powered wheelchair driving tasks and performance-based outcomes. Disabil. Rehabil. Assist. Technol. 2020, 15, 76–91. [Google Scholar] [CrossRef]
- Liu, Y.; Suzurikawa, J. An easily attachable measurement system of joystick angle in a power wheelchair using IMUs for maneuvering logger. Sci. Rep. 2024, 14, 8520. [Google Scholar] [CrossRef]
- Sorrento, G.U.; Archambault, P.S.; Routhier, F.; Dessureault, D.; Boissy, P. Assessment of joystick control during the performance of powered wheelchair driving tasks. J. Neuroeng. Rehabil. 2011, 8, 31. [Google Scholar] [CrossRef] [PubMed]
- Suzurikawa, J.; Kurokawa, S.; Sugiyama, H.; Hase, K. Estimation of steering and throttle angles of a motorized mobility scooter with inertial measurement units for continuous quantification of driving operation. Sensors 2022, 22, 3161. [Google Scholar] [CrossRef] [PubMed]
- Satoh, Y.; Sakaue, K. A secure and reliable next generation mobility—An intelligent electric wheelchair with a stereo omni-directional camera system. Synth. Engl. Ed. 2009, 2, 107–120. [Google Scholar]
- Wolkowicz, K.L.; Pentzer, J.L.; Miller, C.X.; Moore, J.Z.; Brennan, S.N. An instantaneous center of rotation-based extended Kalman filter approach for the on-line estimation of wheelchair tire slip. ASME J. Dyn. Syst. Meas. Control 2019, 141, 121001. [Google Scholar] [CrossRef]
- Jayasuriya, M.; Arukgoda, J.; Ranasinghe, R.; Dissanayake, G. Towards adapting autonomous vehicle technology for the improvement of personal mobility devices. In Proceedings of the 2020 5th International Conference on Innovative Technologies in Intelligent Systems and Industrial Applications (CITISIA), Sydney, NSW, Australia, 25–27 November 2020. [Google Scholar]
- He, M.; Zhu, C.; Huang, Q.; Ren, B.; Liu, J. A review of monocular visual odometry. Vis. Comput. 2020, 36, 1053–1065. [Google Scholar] [CrossRef]
- Aqel, M.O.A.; Marhaban, M.H.; Saripan, M.I.; Ismail, N.B. Review of visual odometry: Types, approaches, challenges, and applications. SpringerPlus 2016, 5, 1897. [Google Scholar] [CrossRef] [PubMed]
- Aqel, M.O.A.; Marhaban, M.H.; Saripan, M.I.; Ismail, N.B. Adaptive-search template matching technique based on vehicle acceleration for monocular visual odometry system. IEEJ Trans. Electr. Electron. Eng. 2016, 11, 739–752. [Google Scholar] [CrossRef]
- Nourani-Vatani, N.; Borges, P.V.K. Correlation-based visual odometry for ground vehicles. J. Field Robot. 2011, 28, 742–768. [Google Scholar] [CrossRef]
- Shi, J.; Tomasi, C. Good features to track. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994. [Google Scholar]
- Horn, B.K.; Schunck, B.G. Determining optical flow. Artif. Intell. 1981, 17, 185–203. [Google Scholar] [CrossRef]
- Lucas, B.D.; Kanade, T. An iterative image registration technique with an application to stereo vision. In Proceedings of the IJCAI’81: 7th International Joint Conference on Artificial Intelligence, Vancouver, BC, Canada, 24–28 August 1981; pp. 674–679. [Google Scholar]
- Kirby, R.L.; Swuste, J.; Dupuis, D.J.; MacLeod, D.A.; Monroe, R. The wheelchair skills test: A pilot study of a new outcome measure. Arch. Phys. Med. Rehabil. 2002, 83, 10–18. [Google Scholar] [CrossRef]
- Sun, Q.C.; Odolinski, R.; Xia, J.C.; Foster, J.; Falkmer, T.; Lee, H. Validating the efficacy of GPS tracking vehicle movement for driving behaviour assessment. Travel Behav. Soc. 2017, 6, 32–43. [Google Scholar] [CrossRef]
- Deraz, A.A.; Badawy, O.; Elhosseini, M.A.; Mostafa, M.; Ali, H.A.; El-Desouky, A.I. Deep learning based on LSTM model for enhanced visual odometry navigation system. Ain Shams Eng. J. 2023, 14, 102050. [Google Scholar] [CrossRef]
- Agostinho, L.R.; Ricardo, N.M.; Pereira, M.I.; Hiolle, A.; Pinto, A.M. A practical survey on visual odometry for autonomous driving in challenging scenarios and conditions. IEEE Access 2022, 10, 72182–72205. [Google Scholar] [CrossRef]
- Masud, U.; Almolhis, N.A.; Alhazmi, A.; Ramakrishnan, J.; Ul Islam, F.; Farooqi, A.R. Smart wheelchair controlled through a vision-based autonomous system. IEEE Access 2024, 12, 65099–65116. [Google Scholar] [CrossRef]
- Mohamed, S.A.; Haghbayan, M.H.; Westerlund, T.; Heikkonen, J.; Tenhunen, H.; Plosila, J. A survey on odometry for autonomous navigation systems. IEEE Access 2019, 7, 97466–97486. [Google Scholar] [CrossRef]
- Suzurikawa, J.; Kinoshita, T.; Inoue, T.; Kamo, M.; Iida, N.; Iwata, K.; Matsumoto, O. Evaluation of changes in power wheelchair maneuver induced by a downhill turning prevention control on cross sloped surfaces. IEEJ Trans. Electr. Electron. Eng. 2012, 7, S184–S186. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | IMUs-Based Method [17] | VO-Based Method (This Study) | ||||
|---|---|---|---|---|---|---|
| TM Approach | OF Approach | |||||
| Configuration | Dual IMUs and a Data Logger | Single Monocular Camera | ||||
| Steering (deg) | Throttle (deg) | Steering (deg) | Throttle (deg) | Steering (deg) | Throttle (deg) | |
| Straight | 6.89 | 4.02 | 1.42 | 16.47 | 1.60 | 16.33 |
| Curve | 7.17 | 3.62 | 5.66 | 16.94 | 4.00 | 16.95 |
| Slope | 5.58 | 3.85 | 1.87 | 18.00 | 3.19 | 17.93 |
| Side-slope | 6.16 | 3.70 | 5.65 | 17.33 | 4.17 | 17.14 |
| Braille block | 8.16 | 4.95 | 6.19 | 26.04 | 4.03 | 13.29 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Haraguchi, N.; Liu, Y.; Sugiyama, H.; Hase, K.; Suzurikawa, J. A Monocular Camera as an Operation Logger for Motorized Mobility Scooters: Visual Odometry Method to Estimate Steering and Throttle Angles. Sensors 2025, 25, 2701. https://doi.org/10.3390/s25092701
Haraguchi N, Liu Y, Sugiyama H, Hase K, Suzurikawa J. A Monocular Camera as an Operation Logger for Motorized Mobility Scooters: Visual Odometry Method to Estimate Steering and Throttle Angles. Sensors. 2025; 25(9):2701. https://doi.org/10.3390/s25092701
Chicago/Turabian StyleHaraguchi, Naoto, Yi Liu, Haruki Sugiyama, Kazunori Hase, and Jun Suzurikawa. 2025. "A Monocular Camera as an Operation Logger for Motorized Mobility Scooters: Visual Odometry Method to Estimate Steering and Throttle Angles" Sensors 25, no. 9: 2701. https://doi.org/10.3390/s25092701
APA StyleHaraguchi, N., Liu, Y., Sugiyama, H., Hase, K., & Suzurikawa, J. (2025). A Monocular Camera as an Operation Logger for Motorized Mobility Scooters: Visual Odometry Method to Estimate Steering and Throttle Angles. Sensors, 25(9), 2701. https://doi.org/10.3390/s25092701