1. Introduction
Control systems using Takagi–Sugeno (T-S) fuzzy logic [
1] have a combination of linear controllers as the control law. The membership functions (denoted in this text as
and
) determine the extent to which each controller operates; these are obtained from the state variables at the instant the controllers are active.
The fundamentals of this control method, although well-established, still remain a subject of research since these allow innovations in several technological areas. Recently, studies have focused on relaxed stability conditions and applications of the method in increasingly different fields. However, in the specific area of this work—where the T-S fuzzy control is proposed for the demodulation of signals at the output of a nonlinear system, such as the interferometer—such problem-solving capacity has been scarcely explored.
Recent work has proven the success of the T-S method in studying the stability, design, and control technique of systems based on nonlinear buck converters [
2]. In this line of application, T-S-fuzzy-based control was successfully applied to suppress the nonlinear effects of non-ideal components [
3]. There is also a growing application of this method in studies related to biomedicine and human prosthetics. Based on a T-S fuzzy representation, an observer was designed by applying linear matrix inequality (LMI) techniques, using the frequencies at which the wheels are pushed to calculate the reference velocity of the center of gravity [
4]. Simulation results confirm that the proposed control provides good maneuverability, enabling users to control the center of gravity’s velocity and the yaw rate of the wheelchair. Similar works can be found in [
5,
6]. In 2022, Nunes et al. proposed a robust control method, based on the T-S fuzzy model, applied to electrically stimulate the lower limbs [
7]. The system was designed to handle uncertainties and non-idealities such as fatigue, spasms, tremors, and muscle recruitment.
In the study of structures (SHF—Structural Health Monitoring), a new approach was proposed to suppress the Sommerfeld effect (typical in the area of dynamic systems), which is a nonlinear phenomenon that occurs due to the interaction between non-ideal energy sources and a mechanical system operating in a non-stationary regime [
8]. This suppression is achieved using T-S-fuzzy-based modeling, applied to a three-degree-of-freedom shear building model, and considering the equations of motion with and without nonlinear stiffness.
In the application of LMIs in optics, ref. [
9] presents a robust control algorithm based on LMIs for the fiber optic voltage transformer (FOVT) to achieve optimized dynamic performance. The controller was designed to suppress uncertainties caused by temperature, thereby improving the dynamic performance of the fiber optic voltage transformer.
In [
10], the same group introduces a closed-loop system for optical voltage sensors based on the Pockels effect, which is ideal for high-voltage applications. The LMIs yielded a controller capable of handling temperature variations of up to ±20%. Later, in [
11], the group proposed an improvement for the fast dynamic tracking performance of the optical voltage sensor, the key difference being the use of the Lyapunov function as the theoretical foundation. In [
12], a new closed-loop control system is proposed to optimize the detection accuracy and dynamic response characteristics of the integrated optical resonant gyroscope. The LMIs were used to develop a robust control algorithm that ensures system stability with
performance, with the goal of improving the detection accuracy and dynamic performance of the gyroscope. More recently, in [
13], a new system was developed to improve the temperature performance of the integrated optical resonant gyroscope, where LMIs were applied to determine the control gain used in the system.
Optical interferometry is a respectable technique recommended for measuring physical quantities whose sensors require extremely high sensitivity, such as detecting mechanical displacement amplitudes on the nano- or picometric scale [
14]. Laser interferometry is noninvasive, has a wide bandwidth, and is compatible with fiber optic communication technology. Unlike traditional optical sensors, the interferometry information is imprinted in the phase (radians) of the light, and not in its optical intensity (W/m
2).
A challenge in this area is that measurements are invariably influenced by spurious environmental disturbances. For example, temperature variations in the measurement area, caused by the heat of the sensor operator itself, or by vibrations generated by people walking or talking in the laboratory, can severely degrade the results (this phenomenon is called signal fading [
15,
16,
17]), unless efficient signal processing or feedback control techniques are applied. It is important to emphasize that this drawback does not occur because interferometry is not efficient; rather, it occurs because it is extremely sensitive.
In addition, the transfer curve between the input (a given physical stimulus) and the output (a photo-detected electrical signal) of the interferometer has nonlinear behavior (sinusoidal dependence). This implies the existence of many both stable and unstable equilibrium points (under closed-loop operation), as well as the problem of phase ambiguity [
18,
19,
20]. Thus, two major challenges of interferometry are related to performing measurements with great accuracy, in the face of unpredictable environmental variations and inherent nonlinear effects of the system.
To this day, when used, most closed-loop interferometry systems still employ the classic linear control, PID (proportional–integral–derivative) [
14]. However, since this type of control generally requires piecewise linearization of the system (around certain stable equilibrium point), it is not very suitable for modern demands, where interferometers operate with a large dynamic range (deep-phase interferometry mode). In these cases, the use of passive optical phase-detection techniques such as PGC (phase-generated carrier) [
21], Arctan [
22], and others are strongly recommended, and sometimes closed-loop techniques are even discouraged [
23].
Since the I/O relationship of the interferometer is nonlinear, it becomes natural to conjecture that a nonlinear control system is suitable for solving most problems in this area. Still, in the field of optics, in particular in interferometry, the number of applications of fuzzy logic is small, and that of T-S fuzzy is marginal. Even so, in 2007, a paper was published involving both fuzzy logic control (regular fuzzy, non T-S fuzzy) and optical interferometry [
24]. In fact, a sensing path combining the advantages of an EFPI (extrinsic Fabry–Perot interferometer) and a PZT (piezoelectric material, with hysteresis) sensor was proposed to overcome the disadvantages when both (nonlinear) are used separately. As a global result, the intrinsic interferometric nonlinearity of a conventional EFPI sensor is compensated.
As a rule, the task of modeling measurement units applied to real-world problems and with a high level of precision is usually very laborious, due to the nonlinearities and dynamics inherent to every practical system [
25].
One of the first works to propose a nonlinear control to compensate spurious influences on an optical nonlinear system was published by Zhu and Chen (1996), to compensate for the influence of the atmosphere and other drifts in a nonlinear double Fabry–Perot interferometer (including a piezoelectric actuator and its hysteresis effect) [
26]. For this purpose, the PSHS (parallel subsystem of hardware simulation) technique was used; this is an effective engineering strategy for solving complex nonlinear systems whose responses constitute tasks that are too complicated to be deduced analytically.
In 2017, we proposed the use of nonlinear control theory, based on variable structure control and sliding modes (VS/SM), to interrogate interferometry sensors and obtained promising results, presenting important features such as ease of implementation, low cost, and robustness. To the best of our knowledge, we were pioneers in this control strategy. Thus, ref. [
27] applied the technique to characterize the multi-axis piezoelectric flextensional actuator, using the bulk Michelson interferometer operating under low modulation depth. Sinusoidal signals and arbitrary waveforms were detected, and linearity, hysteresis, and frequency response (in module and phase) graphs were determined up to 20 kHz. However, a self-calibration process (see
Section 2.1) of the interferometer was need, and its dynamic range was limited to
rad. In [
28], VS/SM was applied to a modified bulk Michelson interferometer to generate two-phase quadrature outputs, operating in the high-gain approach mode, and expanding the dynamic detection range of the method to values well above
rad. The arrangement did not require reset procedures or initial self-calibration. Although the system presented excellent performance, it was necessary to employ an external optical phase modulator (PZT) in the feedback circuit to measure the value of the phase shift of interest (as inevitably occurs to every high-gain approach interferometry architecture). An important evolution of the previous method occurred in [
29], in which the passive interferometry phase-detection method emulated the technique of the physical closed-loop high-gain approach. That is, the arrangement worked as it did in [
28]; however, the interferometer operated in an open-loop form (significantly simplifying the optical hardware) and the external auxiliary modulator (PZT) was implemented digitally through the software (being able to assume very high gain values (rad/V)). Thanks to this, high-gain approach interferometry can reestablish its credibility, having previously been considered by many authors to be “not a practical approach” (mainly due to problems with the reset circuit). Regarding practical applications, the VS/SM technique was tested in the fiber optic version of the Michelson interferometer in the following research works: in [
30], it was used to characterize a thin-film molybdenum-coated fiber optical phase modulator based on thermal effect; in [
31], it was used to interrogate an opto-mechanical accelerometer; and in [
32], it was used as a fiber optic seismometer based on a fiber optic Mach–Zehnder interferometer.
Given the impossibility of defining nonlinear systems that are accurate enough, a modern and successful solution refers to artificial intelligence (AI), including machine learning and deep learning [
25]. Thus, the application of AI to a nonlinear system such as the interferometry seems to be a natural option. For example, ref. [
33] used deep learning architectures to classify vibration patterns generated in a Michelson interferometer by handwriting on an optical desk, achieving an accuracy of 92% in identifying the characters a–z. Sokkar et al. (2022) used a Mach–Zehnder interferometer and artificial intelligence in the investigation of opto-thermo-mechanical features in the antimicrobial action of polyamide-6 fibers grafted by quaternary ammonium salt with nano zinc oxide [
34]. The objective was to test non-traditional antimicrobial fabrics (a combination between antimicrobial agents and conventional polymeric fibers) for protection against microorganisms (
E. coli,
S. aureus, and
Candida albicans) and prevent their spread. The mechanically drawn process (the draw ratio), the time, and the temperature of thermal annealing treatments were tested with the interferometer to improve the structural features of the fiber used in order to obtain the best antimicrobial activity. A convolutional neural network (a highly accurate, refined AlexNet–SVM network) was used to identify the predominant type of noise in the captured microinterferogram pattern and to specify the most appropriate type of band pass filter to perform the process of suppressing these kinds of noise. According to the network’s decision, the best way for denoising would be to apply a Wiener filter to all sampled microinterferograms. Once this was performed, the method chosen to detect the optical phase shift was the conventional arc tangent method. On the other hand, optical fiber interferometers combined with artificial intelligence techniques have been extensively used in intrusion detection systems, aiming to protect high-value assets and vital infrastructure such as refineries, petrochemical plants, government facilities, and military installations. In [
35], a wide range of distributed fiber sensor networks—integrating a large number of sensors and with different purposes—are discussed, identifying phase-error-induced crosstalk and acquiring the ability to distinguish between normal building variations, false alarms, noise, and actual intrusions. Interferometry contributes with its high accuracy, responsiveness, and reliability. The number of applications of interferometry allied to AI and machine learning has been increasing significantly in recent years, as in the works of [
36] (for classification of adulterant degree in liquid solutions), [
37] (for free-form surface measurement), [
38] (for optical metrology), and in several others, highlighting the impressive power and capacity of this tool.
In this scenario of detection methods using nonlinear control, below, considerations on the applications of the nonlinear fuzzy model to the nonlinear interferometry system are presented. Applications of fuzzy logic control to truly detect optical phase signals are rare, although it is possible to cite the work of Park and Song (2005), who used one of the first fuzzy versions for this purpose, the so-called fuzzy PID controller [
39]. The proposal was used for a simple task (when compared with [
24]), namely to stabilize the operating point of the interferometer against spurious environmental disturbances. Since the PID controller is not suitable for nonlinear systems, fuzzy logic was used, which has the ability to control nonlinear systems, eliminating some of the influences of environmental disturbances and allowing the interferometer to be stabilized and controlled. From then on, the detection technique used was simply the arc tangent. Fuzzy PID control was also used in 2015, for WLI (white light interferometry) for a similar application [
40]. In 2020, an even simpler version, a fuzzy PI control, was used in a fiber optic current sensor (FOCS) [
41]. Only the simulations have been published.
Conversely, the T-S Fuzzy strategy is significant because LMIs-based designs of controllers for T-S fuzzy models allows us to simultaneously consider uncertain parameters in plants, time delays, and input saturation. Doing so also enables us to specify performance indexes, such as decay rate (which is related to the setting time) and the
or
norms of the closed-loop system, such that the effect of a disturbance is attenuated. Furthermore, the design of the controllers is represented as a convex optimization problem that is not hard to solve [
8,
9]. It is worth mentioning that, in this paper, the design specification was only the asymptotic stability of the equilibrium point x = 0, using a simple quadratic Lyapunov function and the experimental results. In fact, there exist many other less conservative design methods that can be applied and improve the performance of this controlled system, such as those based on more sophisticated Lyapunov functions such as fuzzy Lyapunov functions [
42,
43], min type Lyapunov functions [
44], and more elaborated control laws, such as switched controllers [
45] (which may be tested in future publications). Despite this, the authors think that the procedure proposed here is a representative proof-of-concept example that opens new and important possibilities for designing powerful controllers for these systems.
As can be seen, the number of publications using T-S fuzzy nonlinear control (with or without LMIs) to solve the problems involved in interferometric phase detection are few, and, when found, they are not overarching or are produced by the same groups with incremental contributions to the same conception. In this work, the authors propose a novel method for detecting optical phase signals, immune to fading problems, and robust from the point of view of modern control theory. An important evolution is that the interferometer works in open loop mode, and all phase compensation is done by the external nonlinear observer system. The fusion of methods such as fuzzy T-S control theory and LMIs to measure microscopic displacements will be discussed. The theory, simulations, and experiments will be presented, and the efficiency of the technique will be tested by measuring displacements produced by a piezoelectric actuator positioned in one of the arms of a Michelson interferometer. Using very simple and inexpensive optical hardware, all the power of the method will be concentrated in the software. It will be shown that the proposed system is capable of competing with results as good as several proposals with complicated optics and electronics published in the literature.
3. Simulation of the T-S Fuzzy Control Applied to the Michelson Interferometer
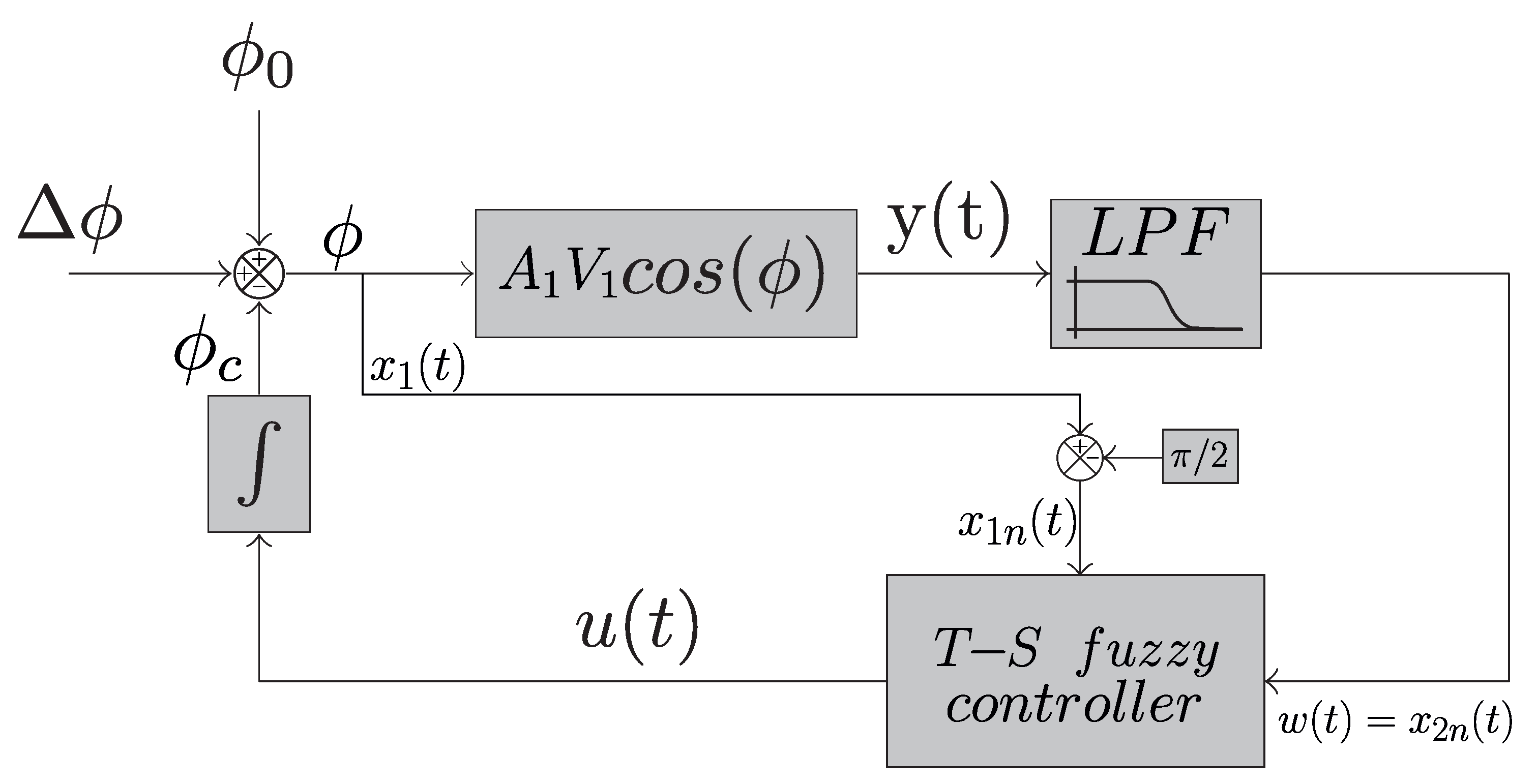
In this section, the computational simulation of the system described so far will be discussed. First, the system was simulated using SIMULINK software (R2022b) in a closed-loop configuration, following the diagram in
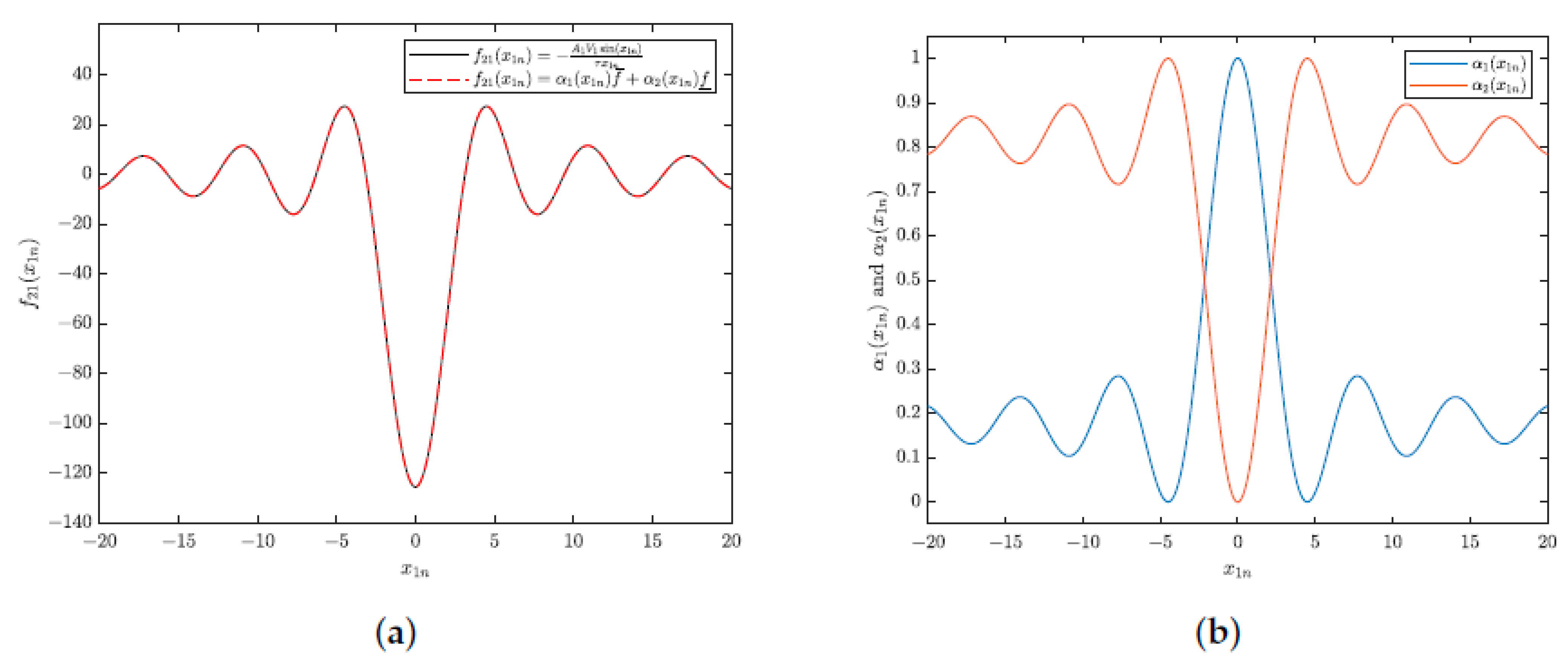
Figure 4, which consists of the following: two signal generators (red blocks) to generate
and
; two blocks of functions (blue blocks), one containing the interferometer function and another block determining
and
based on the value of
; the low-pass filter shown in
Figure 2 (green block); the gains with the previously determined values
and
; and finally, the integrator in the system’s feedback loop. The simulation was conducted in discrete time, where the discrete-time transfer function of the filter was obtained using the bilinear transformation.
The terms A and V will be considered as 1, once the interferometric output signal is normalized (as seen later in this section).
The simulations performed using SIMULINK had a sampling frequency of Hz, with a time interval of s The spectral analyses presented in the simulations use a frequency resolution of Hz, applying a Hanning window for signal tapering. The same windowing method was adopted for the spectral analysis of the experimental results.
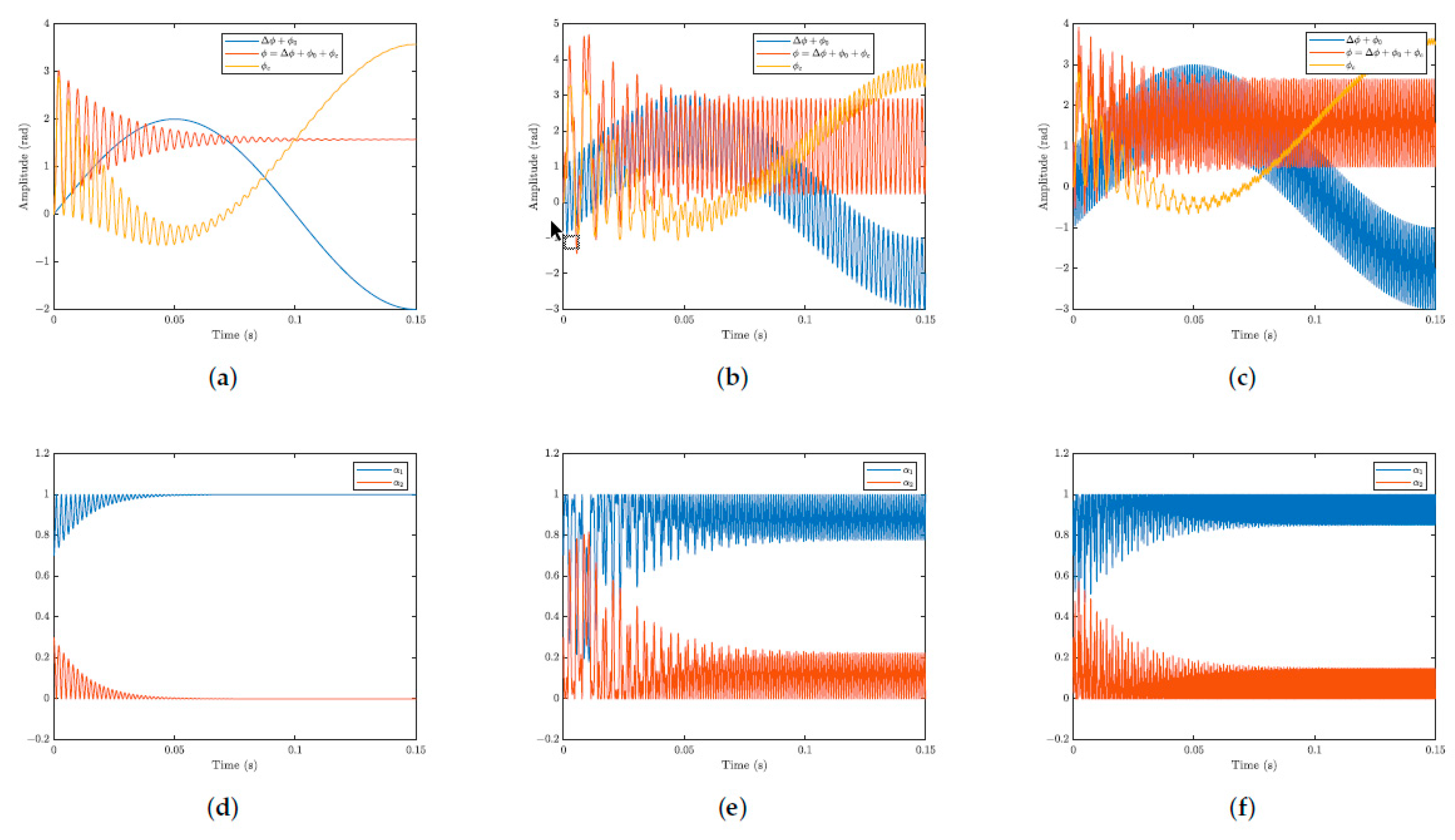
In
Figure 5, the graphs in the first row show the input (
), the temporal response of the system (
), and the phase correction (
), while the graphs in the second row show the variation of membership functions over time (
and
).
Figure 5a,d illustrate the simulations where the signal of interest (
) was not included, with only the low-frequency signal (
) as input. In
Figure 5b,e, the simulations are illustrated with the input as a combination of high-frequency (
) and low-frequency (
) signals. In
Figure 5c,f, the system input was the combination of the signal
(
) with the same signal
(
) already used in the other simulations. In both simulations the amplitude of the environmental disturbance term
was considered severe, equal to twice the amplitude of the signal of interest.
In the first column of graphs in
Figure 5a,d, it can be observed that, in a simulation without a high-frequency signal, the system converges to the equilibrium point
. However, it is important to note that a variable transformation was performed, where the point
converges to 0 (
). Since there is no signal with a frequency higher than the filter’s cutoff frequency, the system remains fixed at the equilibrium point. The membership functions oscillate until they reach the equilibrium point and then remain constant.
The second and third columns of graphs in
Figure 5b,c,e,f show that, when the input includes the high-frequency signal in addition to the low-frequency signal, the output signal exhibits only the high-frequency component oscillating around the equilibrium point
. The correction signal
contains the low-frequency component. After the transient phase, the degree of membership oscillates at the frequency
between the two controllers.
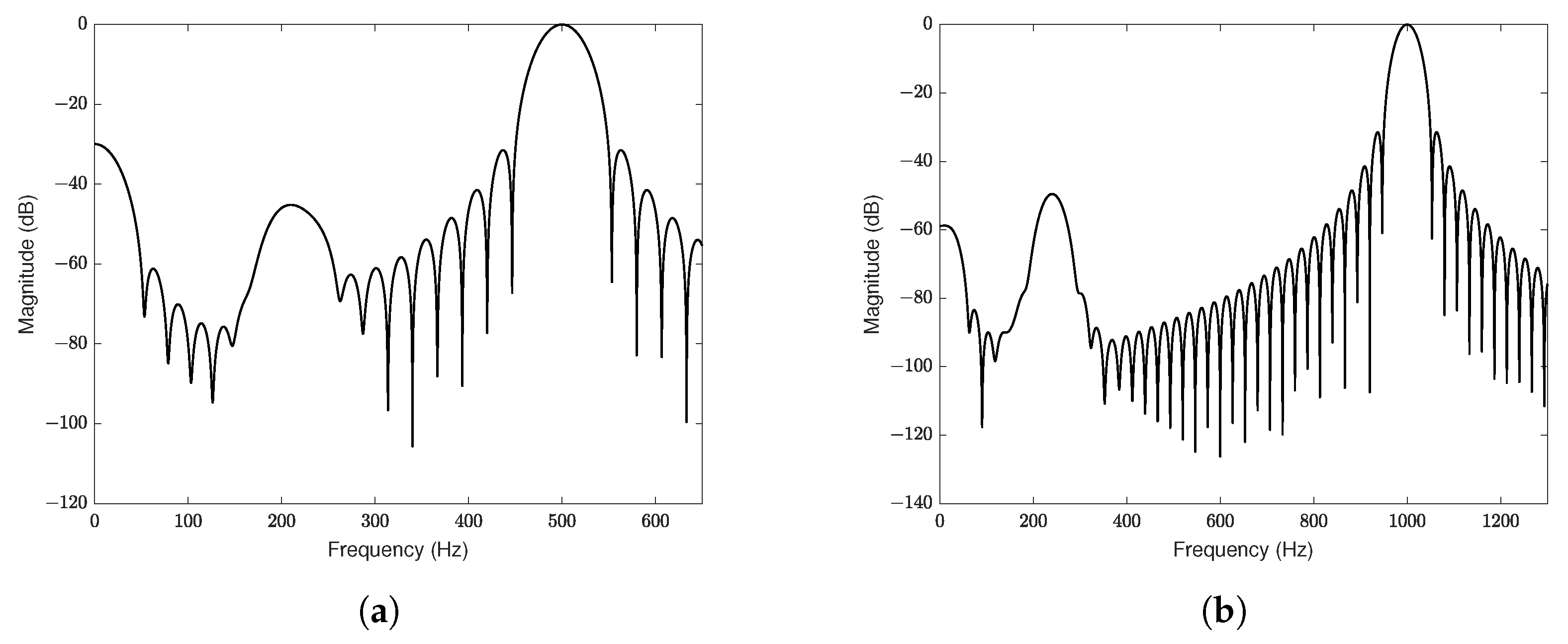
To demonstrate the frequency of the output signals in
Figure 5b,c, a spectral analysis of the signal was performed between 0.075 and 0.15 s and is shown in
Figure 6. The spectral analysis for
with a frequency of 500 Hz is shown in the first graph (
Figure 6a), and for a frequency of 1000 Hz in the second graph (
Figure 6b).
Since the amplitude of
was chosen to be twice the amplitude of
in
Figure 5, from the spectral analyzes shown in
Figure 6, it is evident that the signal
is compensated, allowing the predominance of the signal
in the demodulated output. Actually, the side lobes—present below the signal frequency,
—are associated with the transient regimes of the signals shown in
Figure 5.
Amplitude and frequency sweeps were also performed using the LABVIEW software (version 15.0). The system used is the same as the one used experimentally, as will be shown in the next section (Figure 9b). The system’s input consisted of sine waves generated by the software, with amplitudes and frequencies defined in the program. In
Figure 7a, the result of the amplitude sweep is shown, where the input signal frequency was kept constant at 500 Hz, and the amplitude was varied from
to 4 rad in steps of
rad. In
Figure 7b, a frequency sweep was performed by varying the input signal frequency while keeping the amplitude fixed at 1 rad. The frequency range varied from 10 to 4000 Hz in steps of 1 Hz.
In
Figure 7a, it can be observed that the method operates up to
rad peak (
rad peak), which is the limit of the arc cosine function’s range (see
Section 4). Beyond this value, the phase-detected signal becomes wrapped, but the information should be recovered by unwrapping techniques. Consequently, the dynamic range of this T-S fuzzy method ranges from 0 to
rad peak (not taken into account the noise). In
Figure 7b, the frequency sweep indicates that there is a peak at 15 Hz, the value of which is 1.15211 radians; then, the curve enters a flat region, which is recommended for reliable measurements. Thus, in principle, the T-S fuzzy method would become effective above 15 Hz (according to next paragraphs, the choice this lower limit must be increased due to practical reasons).
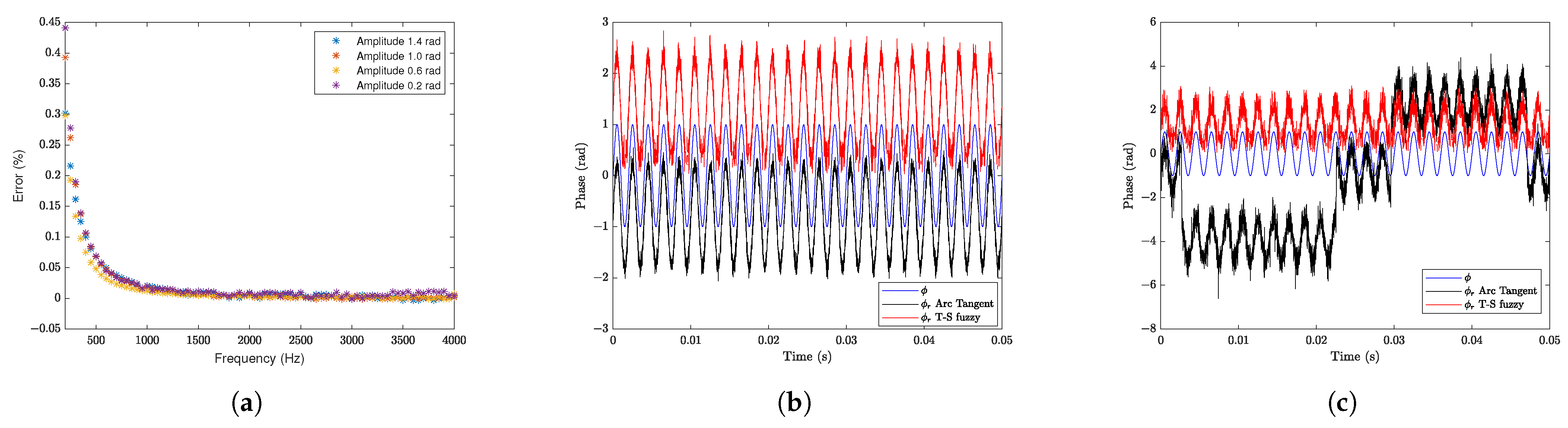
In the following, a more complete analysis of the error and noise sensitivity was carried out, and the results were obtained via simulation. In
Figure 8a, we illustrate the percentage error in the measurement of sinusoidal signals with amplitudes of 0.2, 0.6, 1.0, and 1.4 radians, at frequencies from 100 Hz to 4000 Hz. The largest error in this frequency band occurs near the lower limit and is 0.45%. This band was selected precisely because it is a favorable region where the error is less than 0.45% at 100 Hz. Despite the accelerated growth of the curve at the lower limit of the band, the maximum error at 15 Hz is only 13%. This behavior occurs due to the slight amplification of the system observed in the spectrum of
Figure 7b. In turn, by considering white noise in the interferometry outputs, the response of the T-S fuzzy system was analyzed as shown in
Figure 8b and
Figure 8c, respectively. Sinusoidal input signals with 1.0 rad amplitude at 500 Hz were considered (in blue color), for additive noises with standard deviations of 0.1 (SNR = 15 dB) and 0.3 (SNR = 5 dB); the noisy output signals, obtained by the arc tangent and T-S fuzzy methods, are shown in black and red colors, respectively. Regarding noise sensitivity, the fuzzy T-S method demonstrated higher immunity. This is because the arc tangent method is subject to phase ambiguity, and may experience phase jumps (of
rad intervals) with a simultaneous abrupt change in the signal (and consequently, periodic errors). Actually, even if the input signal is smaller than
rad, when it is in the presence of additive noise, it can generate spikes that exceed
; therefore, it can produce a totally incorrect phase detection. This occurs because the phase unwrapping routine of the arc tangent method inadvertently generates a phase jump of
radians. This type of mistake is significantly evident in
Figure 8c. This drawback does not occur in the fuzzy T-S method; since the system has only one stable equilibrium point, the observer’s closed loop always keeps the signal at the same operating point.
Since these results do not take into account only the action of the low-pass filter with a cutoff frequency of 20 Hz (frequency below which the fuzzy T-S method should compensate for random environmental variations), we prefer to choose the beginning of the dynamic range at 100 Hz, corresponding to the maximum error of 0.45%, in accordance with
Figure 8a.
As revealed in the text, the nonlinear fuzzy T-S method proposed in this work provides a single stable equilibrium point, around the phase quadrature condition,
rad. This may constitute a disadvantage in relation to other nonlinear control methods, such as VS/SM in LGA mode (with presents many stable equilibrium points), for example [
27]. In fact, if the sensor is subjected to an intense external disturbance, capable of moving it far away from the stable equilibrium point, the observer may have some difficulty in bringing it back to normal operation quickly enough, despite very high controller gains can be provided when the phase compensation modulator is implemented in software (instead with PZTs). On the other hand, this architecture is still advantageous compared to VS/SM, since it does not present problems such as inconvenient chattering, and so, it obtains better accuracy [
27,
28,
29].
4. Experimental Setup
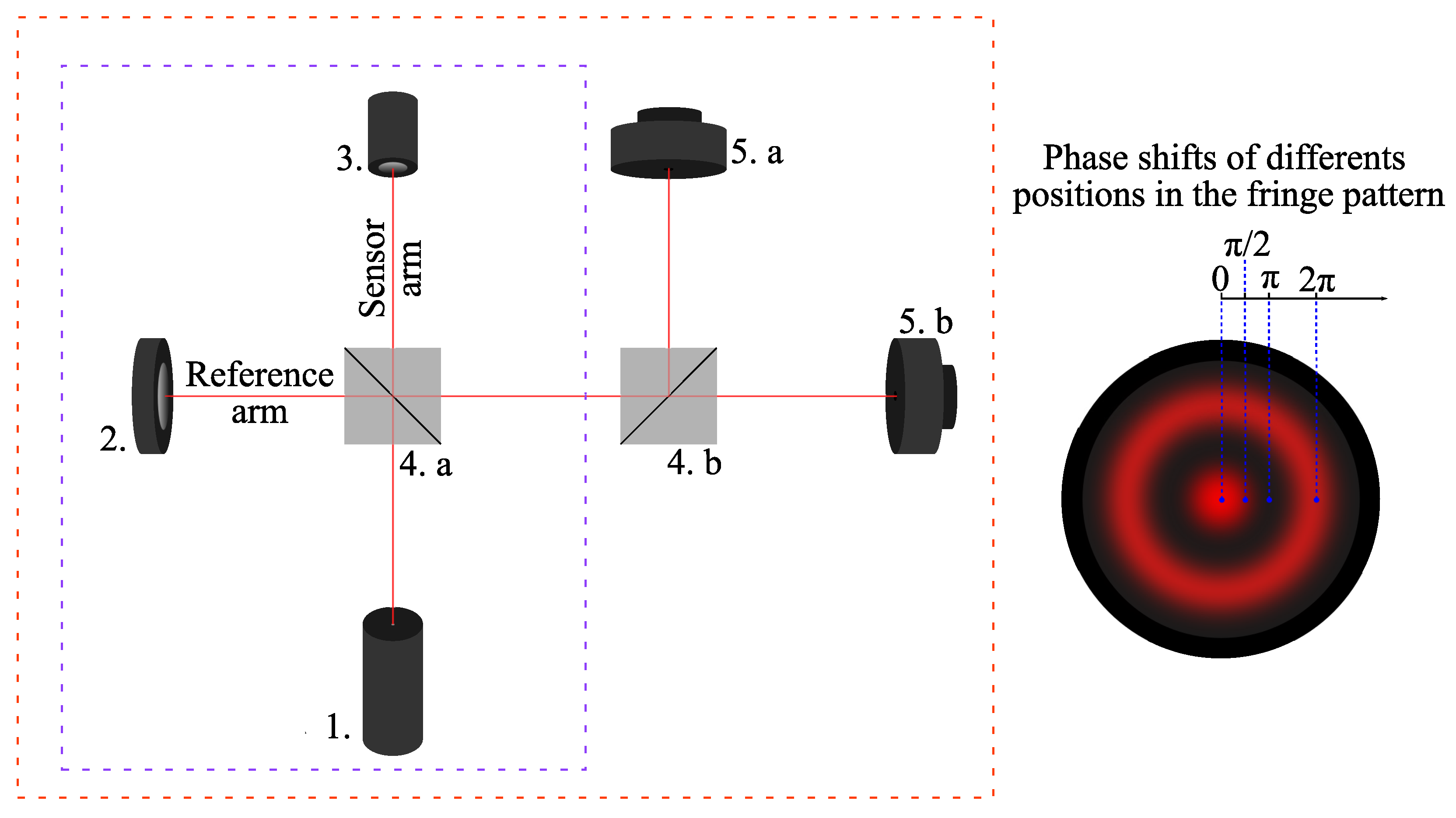
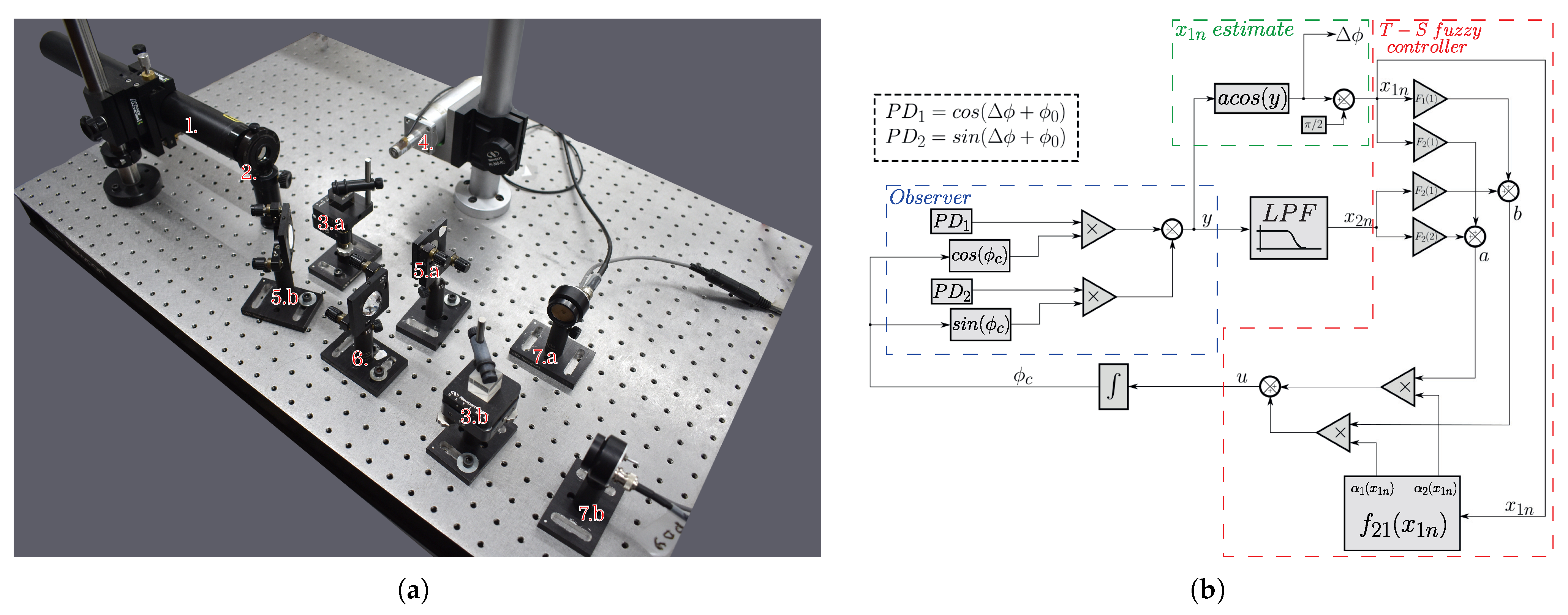
This section discusses the experimental setup, shown in
Figure 9a, where a modified open-loop Michelson interferometer (
Figure 1) is used. As observed in simulation, in principle, the method does not require two quadrature signals; however, since it was developed within the observer framework described in [
29], the quadrature formed by the modified Michelson interferometer is necessary. (To apply the method without signal quadrature, a second piezoelectric actuator would be required in place of the fixed mirror in the reference arm to enable physical feedback within the system [
28]). The experimental setup shown in
Figure 9a consists of the following components: a He-Ne laser operating at
with a power of 5 mW (1); a polarizer to prevent feedback into the laser cavity (2); two beam splitters (CMI-BS013 from Thorlabs, Newton, NJ, USA)—one to split the beams between the sensing and reference arms (3.a), and the other to divide the beams for the photodetectors forming the quadrature signals (3.b); a commercial piezoelectric actuator (PZT, Control Technics, Powys, UK), responsible for generating the
signal; two mirrors—one to reflect the beam in the reference arm (5.a) and the other to change the beam’s direction (5.b); a negative lens to expand the beam area, facilitating the quadrature condition adjustment (6); two photodetectors (PD
1 and PD
2) to interrogate the interferometric signals (7.a and 7.b). The photodetectors are PIN photodiodes of the PDA 55 model (Thorlabs, Newton, NJ, USA).
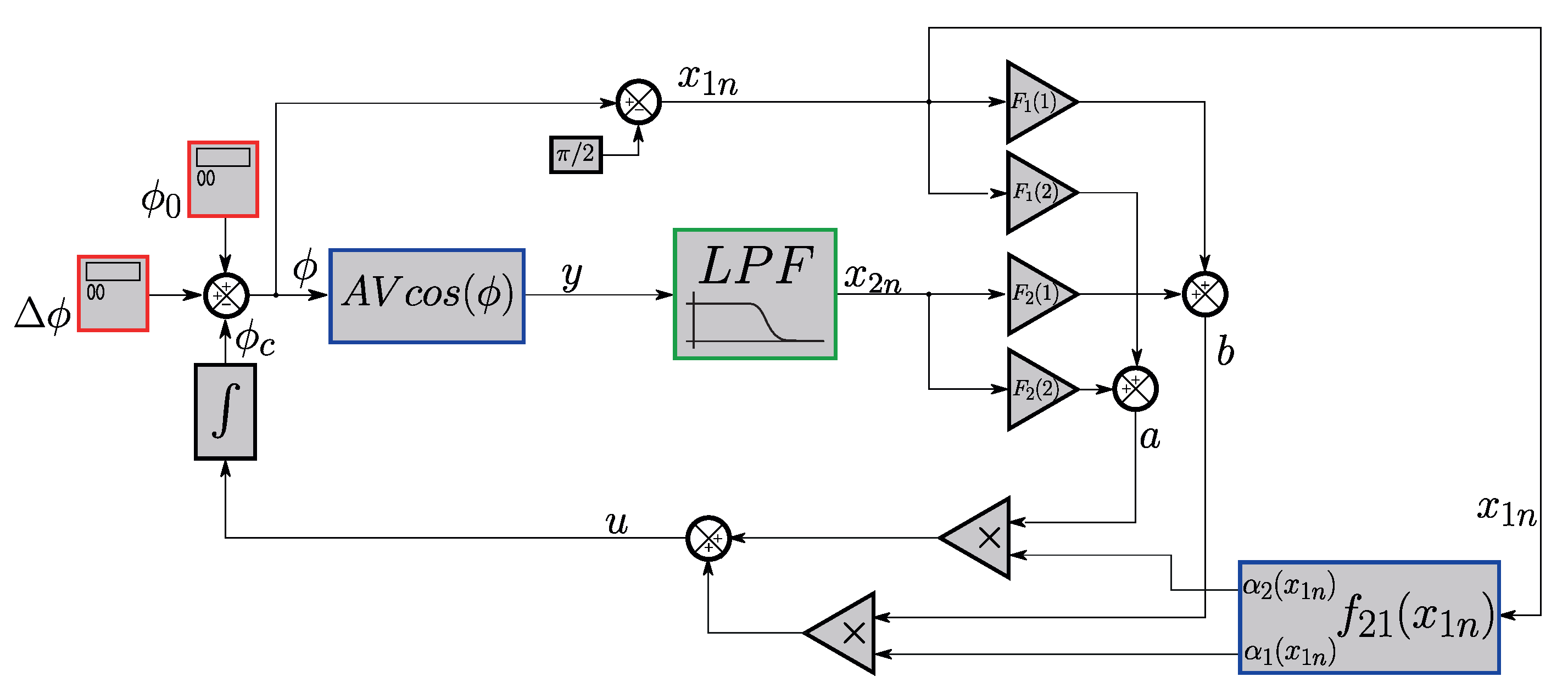
In
Figure 9b, the block diagram implemented in LABVIEW is shown. Here,
and
represent the interferometric signals after normalization, which removes the
terms noted in Equations (
1) and (
2), leaving only the cosine and sine components. The schematic shows the blocks of the T-S fuzzy system working in a closed loop inside the observer, which works as a “digital” closed loop inside the LABVIEW environment. Since the T-S fuzzy system needs the interferometric output,
, it must be synthesized by the various blocks shown in the diagram. The block described in
Figure 4 to determine the membership functions is also shown. As previously stated, an estimate of the value of
is necessary: such an initial estimate can be obtained from
, where the signal of interest is obtained by the arc cosine function shown in the diagram. From there, an estimate for
is also obtained; with this estimated value, it is possible to determine the values of the membership functions at that instant. By applying the control law, it is possible to close the loop inside the observer, compensating
and obtaining the signal of interest
through the port of the arc cosine function.
Since the system operates within the observer framework, the output of the “virtual interferometer” is expressed as the sum of the products
(blue dashed rectangle in
Figure 9b). The output is processed using the arc cosine function to obtain
. A subsequent variable transformation is performed to compute
, defined as
(
) (green dashed rectangle in
Figure 9b). Actually, it is possible to use the arc cos function to estimate
, since the system operates at a low modulation index (amplitudes up to
). With the operating point at
, there would be no issue with the limitation of the image of the arc cos function (
). Using the value of
, a mathematical function block calculates the membership degree values (
and
) at that moment in time,
t. The same output
is passed through a low-pass filter, and the filter output defines
. The values of gains
and
—previously determined in
Section 2.2.2—are then applied to
and
; their corresponding terms are summed as follows: (
and
). With the functions of membership values
and
determined as previously described, the input variable
is calculated as
. The functions of membership determine the extent to which the gains
and
influence the system (red dashed shape in
Figure 9b).
It is important to highlight that, besides producing the variable
, the diagram in
Figure 9b reveals that the arc cos(y) block has two other purposes: (a) it is in this access that the final output signal,
, of the compensated system is measured (it is in this port that the interferometric signal is extracted); (b) concomitantly, this is also the place where the estimated value of
is inserted into the observer system.
To further analyze
Figure 9b, in an ideal scenario where the environmental disturbance
, during the first cycle of data acquisition, the initial conditions are considered to be zero. In this case, the estimated variable is perfect, being equal to the information (
), making it evident that the system reaches
. The correction phase (
) is equal to zero, since
. However, in practical conditions, the environmental disturbance is non-zero (
). Consequently, the estimated variable has an error (
). In parallel with the sliding mode system designed in [
27], the
and
gains are sufficiently large (as determined by the feasibility analysis conducted earlier) to compensate for
. The membership functions transition smoothly from 0 to 1. Unlike the sign function, which causes an abrupt transition in control with sliding modes, the membership functions in the T-S fuzzy control system continuously adjust to determine the optimal controller. In other words, they adapt the gains dynamically, ensuring that the estimated error is corrected and the system is stabilized without introducing oscillations in the control signal (such as the undersirable chattering in the VS/SM system). Furthermore, the simulations in
Figure 5 prove that the system converges to the optimal operation point and stabilizes the system inside the observer.
5. Experimental Results
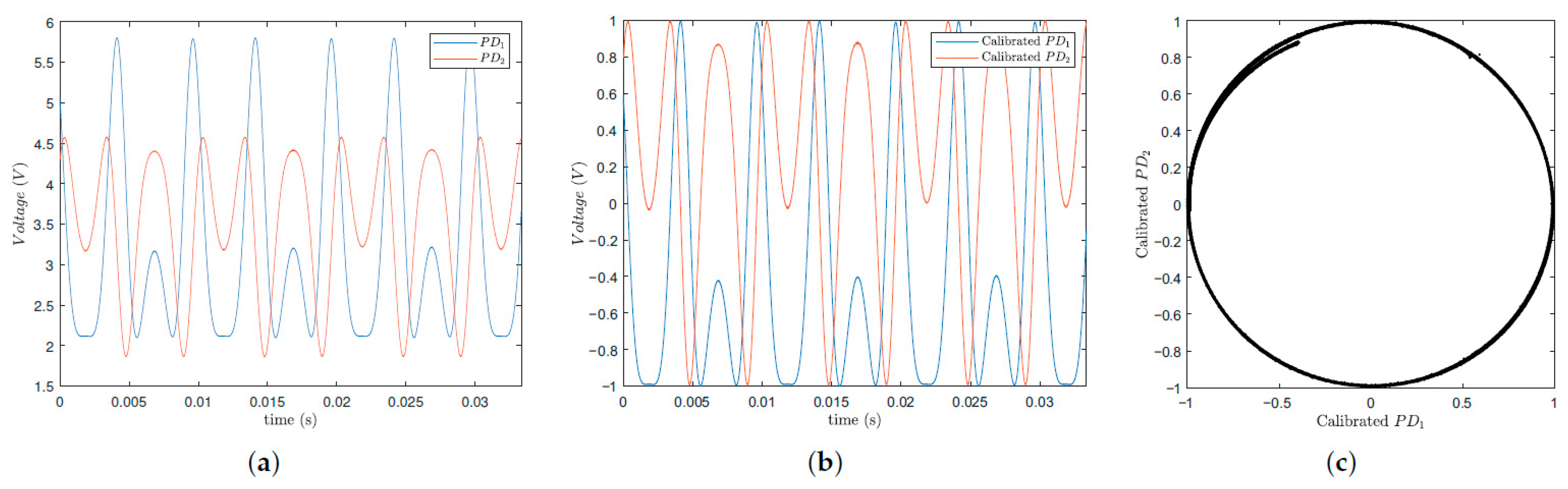
This section presents the experimental results obtained using the experimental setup described earlier. In
Figure 10, the results of the photodetected signal normalization process are presented. For this process, the actuator must exhibit a displacement of at least
. To achieve this, it was subjected to a sinusoidal signal of 100 HZ with an amplitude of 20 V. Data were collected with the NI BNC 2090A data acquisition board at a sampling frequency of 300 kHz. Since the relevant information lies in the signal phase, normalization is required. This process adjusts the signal to the range of −1 to 1 (
), leaving only the cosine and sine terms from Equations (
1) and (
2). In
Figure 10a, it is evident that the raw signal amplitude is greater than 1 and is not centered at zero. Thus, the interferometric signal is adjusted by subtracting its mean value and dividing by its amplitude to achieve unitary scaling and zero centering ((
). So, to perform the normalization shown in
Figure 10b, the interferometric signal
had a mean value of
V and an amplitude of
V. Therefore, the normalized signal is given by
V. For the second signal, it is given by
V. After applying this operation to both interferometric raw signals, the resulting normalized signals are
; since the signals are phase-shifted by
, it can be concluded that,
, in accordance with
Figure 10b. When two signals with equal frequency and amplitude are phase shifted by
, their Lissajous figure is a circle. Since the amplitude is unitary, the circle’s radius is also 1. As expected, the plot of PD
1 normalized versus PD
2 normalized yields the circular Lissajous figure, as shown in
Figure 10c.
The fact that the Lissajous plot shown in
Figure 10c presents a portion in the upper-left region that does not overlap with the larger circle is intentional; this is in order to make it evident that—although our interferometer operates in open-loop mode (and is therefore susceptible to the occurrence of signal fading)—the proposed T-S fuzzy technique is immune to this problem and performs the detection of the desired phase accurately. In summary, since the interferometer operates in an open loop, temperature fluctuations and environmental mechanical vibrations act on the sensor; these drifts influence the optical path difference between the interferometer arms, causing the quasi-static phase shift
in Equation (
1) to vary in time; this disturbs the periodicity of the quadrature phase photo-detected signal samples (see
Figure 10), which in turn disturbs the radius of the circular orbit of the Lissajous figure over time. Despite this, the observer system of the new proposed method is able to compensate this variation in the low-frequency term
in an active manner (using the fuzzy T-S control system), performing the demodulation of the optical phase of interest correctly.
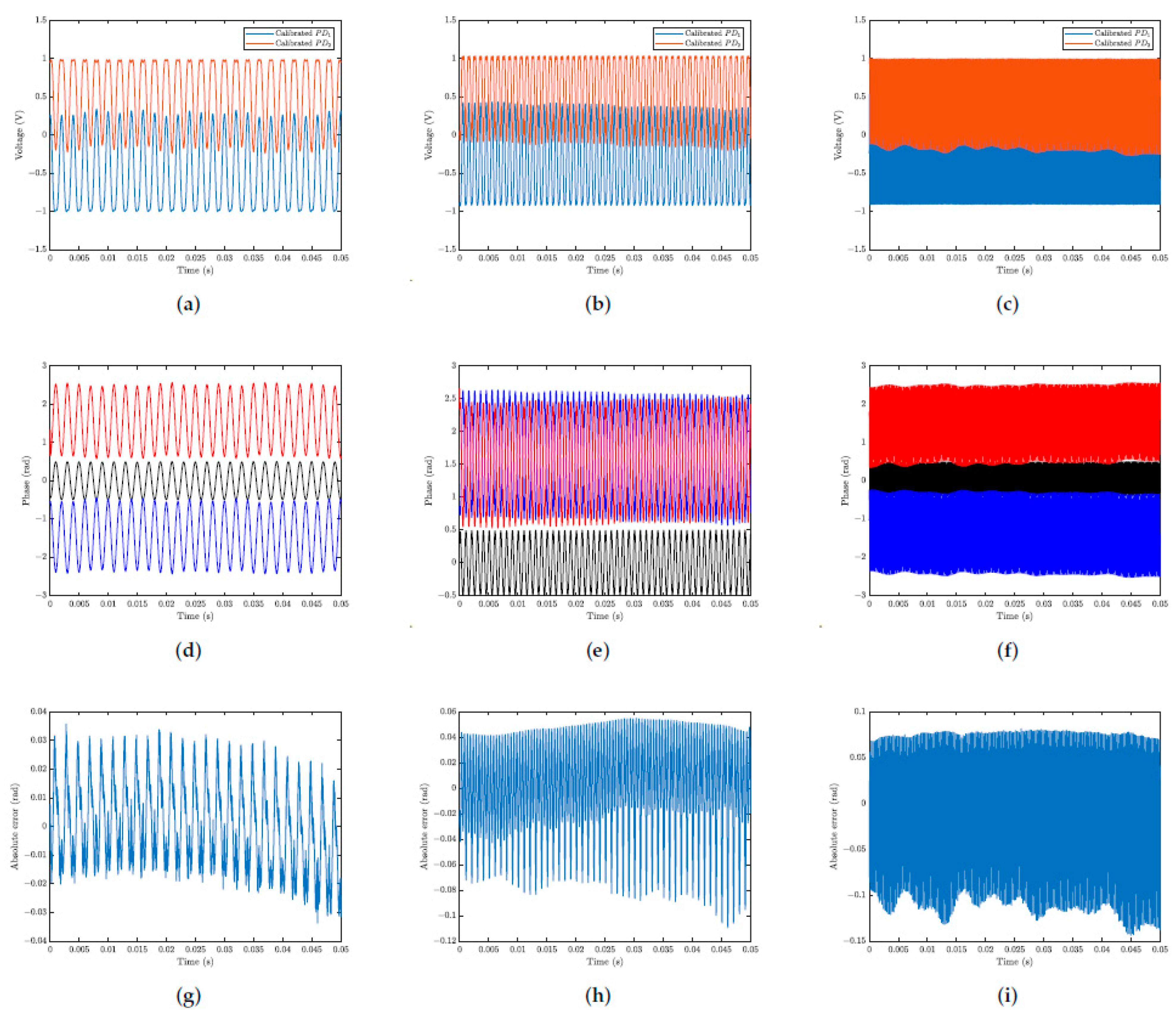
In
Figure 11, the results for optical phase demodulated of the actuator over time are presented. For comparison, the well-established arc tangent demodulation method is used alongside the proposed method. (It is important to emphasize that the arc tangent method uses the signals measured from photodetectors
and
, the output signals of the open loop interferometer. Therefore, it is a fully passive interferometry detection technique.) The classical arc tangent method detects the sum
and, therefore, a high-pass filter with a cutoff at approximately 20 Hz must be used, in order to avoid oscillations in
due to spurious variations in
. The
filtfilt function (from MATLAB) was used, which performs the phase correction of the filtered signal. For lower signal distortion, a 100th order FIR filter using the hamming window was used. The signals were normalized before the displacement measurements were performed. The data acquisition sampling frequency was 300 kHz, and the actuator was subjected to a signal with an amplitude of
V, with frequencies of 500, 1000, and 4000 Hz. The first column in
Figure 11 shows the results for 500 Hz (
Figure 11a,d,g), the second column for 1000 Hz (
Figure 11b,e,h), and the third column for 4000 Hz (
Figure 11c,f,i). The first row represents the normalized interferometric signals (
Figure 11a–c). The second row shows the normalized input signal (in black color), the optical phase demodulated by the T-S fuzzy method (in red color), and the arc tangent method (in blue color) (
Figure 11d–f). The third row shows the absolute error between demodulated signals (
Figure 11g–i).
In
Figure 11, in the second row, for all the frequencies used (500 Hz, 1000 Hz, and 4000 Hz), it is observed that the signals demodulated by the T-S fuzzy method stabilize at
, as predicted by the system and simulations (
Figure 5). Depending on the relative position of the two photodiodes, PD1 and PD2 on the fringe pattern, positioned on two consecutive fringes, quadrature signals out of phase by
rad or
rad can be generated. This type of concern does not cause problems in most practical applications in interferometry; however, when such an effect is relevant, the choice of the two interference fringes (on which the photodiodes must be positioned) should be a matter of attention. In turn, the fuzzy T-S method does not use trigonometric functions (such as the arc tangent) to perform the optical phase shift demodulation and, therefore, does not present this drawback. From
Figure 11d–f shown above, it can be seen that, by multiplying the results obtained by the arc tangent method by −1, there is practically an overlap of these results with those obtained by the T-S fuzzy method. Using the arc tangent method as the reference standard, the discrepancies in the fuzzy measurements were
rad,
rad, and
rad for the 500 Hz, 1000 Hz, and 4000 Hz signals, respectively.
To verify the frequencies and reassess the amplitude exclusively at the
frequency, a spectral analysis of the signals was conducted for each tested frequency.
Figure 12 presents the spectral analyses:
Figure 12a corresponds to the 500 Hz signal,
Figure 12b pertains to the 1000 Hz signal, and finally,
Figure 12c relates to the 4000 Hz signal. It is noteworthy that, unlike the simulated spectra shown in
Figure 6, these experimental spectra correspond to the steady-state operation regime.
The spectral analyzes presented in
Figure 12 were intentionally not adjusted. This highlights that the peak frequencies of the actuator’s input signal coincide with the two demodulation methods. It can also be observed that, for the T-S fuzzy method, low frequencies are attenuated; this result was expected, since the method aims to eliminate the effect of
on the measurement of optical phase shift. Just as good agreement was observed between results using the T-S fuzzy and arc tangent techniques (with proper signal inversion) when measured in the time domain, good agreement was also observed between the spectra measured at different frequencies.
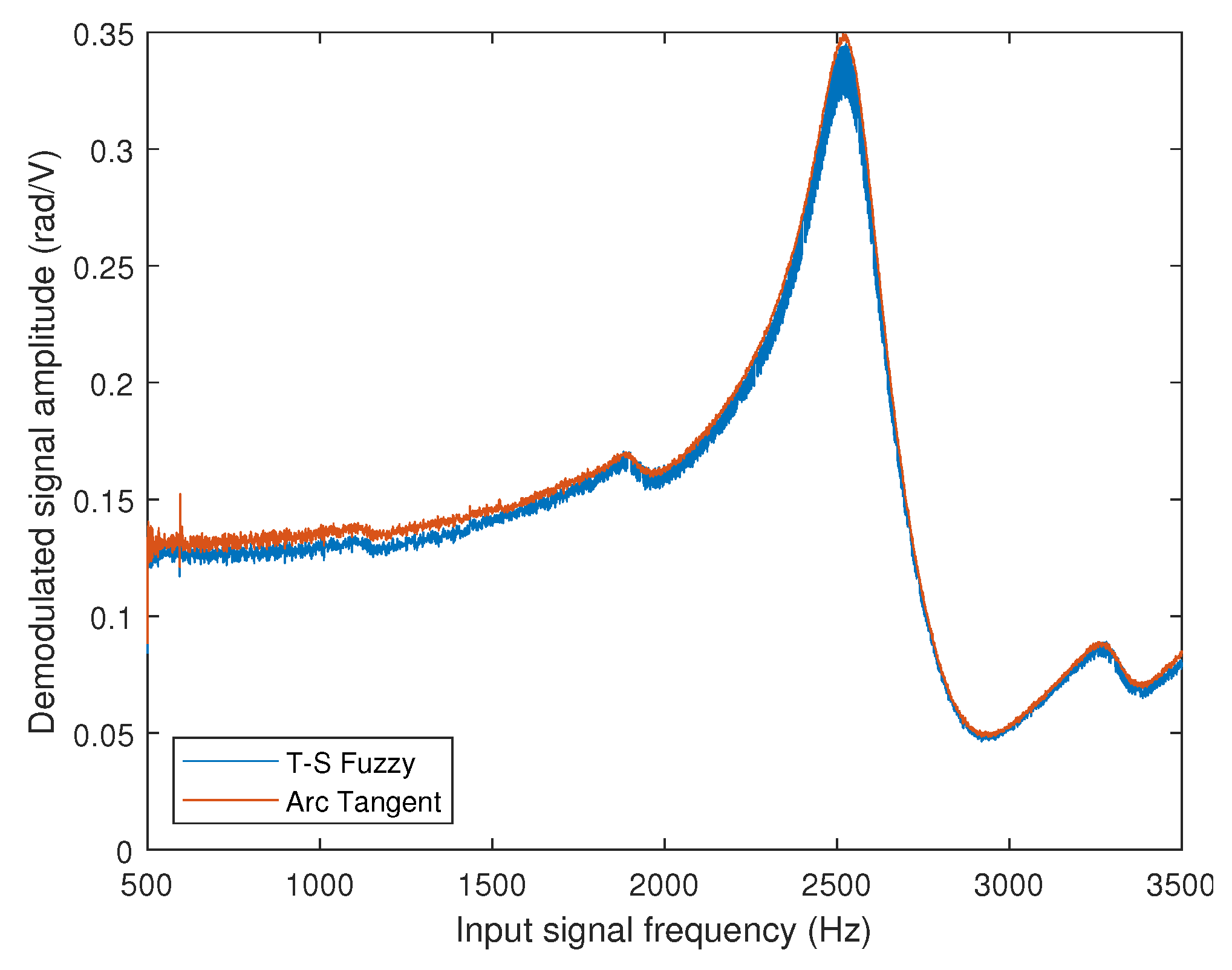
In
Figure 13, the frequency response of the commercial PZT actuator was obtained in the range of 500 to 3500 Hz with a step of 1 Hz. The measured phase shift was normalized by the voltage of the signal applied to the actuator. The procedure involved determining the frequency response using two demodulation methods: the T-S fuzzy method proposed in this work (blue line) and the arc tangent method used as a standard (red line).
Observing the processed data, a flat band (3 dB variation) from 500 to 1000 Hz can be observed, with the main resonance near 2518 Hz. The agreement between the two methods used is also observed, as both present approximately the same frequency response. We may conclude that the interferometry detection method with fuzzy T-S observer-based control is as good as the arc tangent method. The discrepancy between the two methods over the 3dB frequency bandwidth is less than 5.54%, with an average discrepancy of 1.72% over the band between 500 Hz and 3500 Hz.


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}