



Quantification of the Mechanical Properties in the Human–Exoskeleton Upper Arm Interface During Overhead Work Postures in Healthy Young Adults

 , ,
, ,  , and
, and
Abstract
1. Introduction
2. Materials and Methods
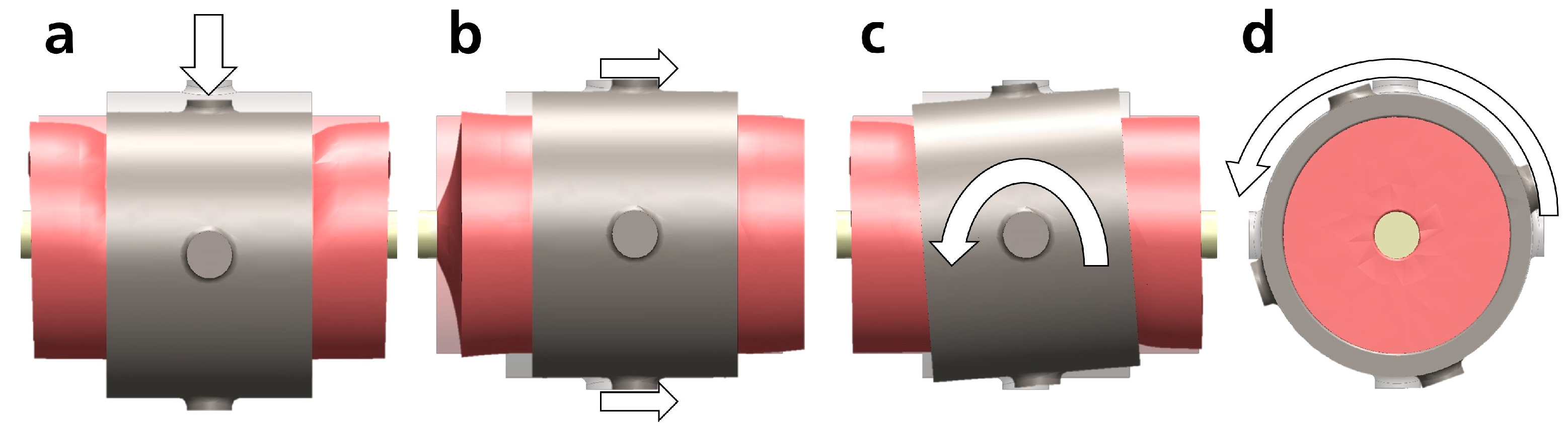
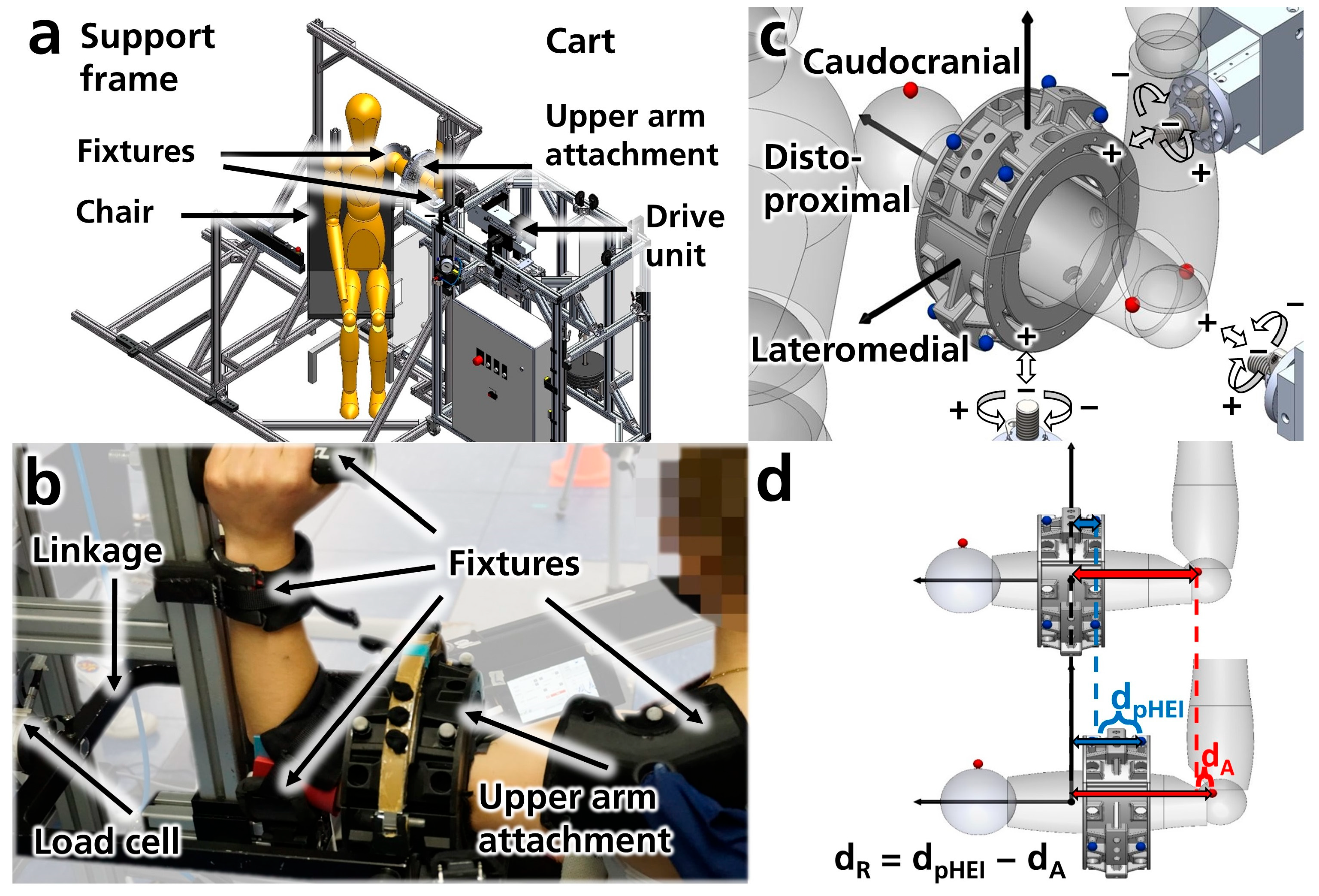
2.1. Measurement Setup
2.2. Measurement Procedure
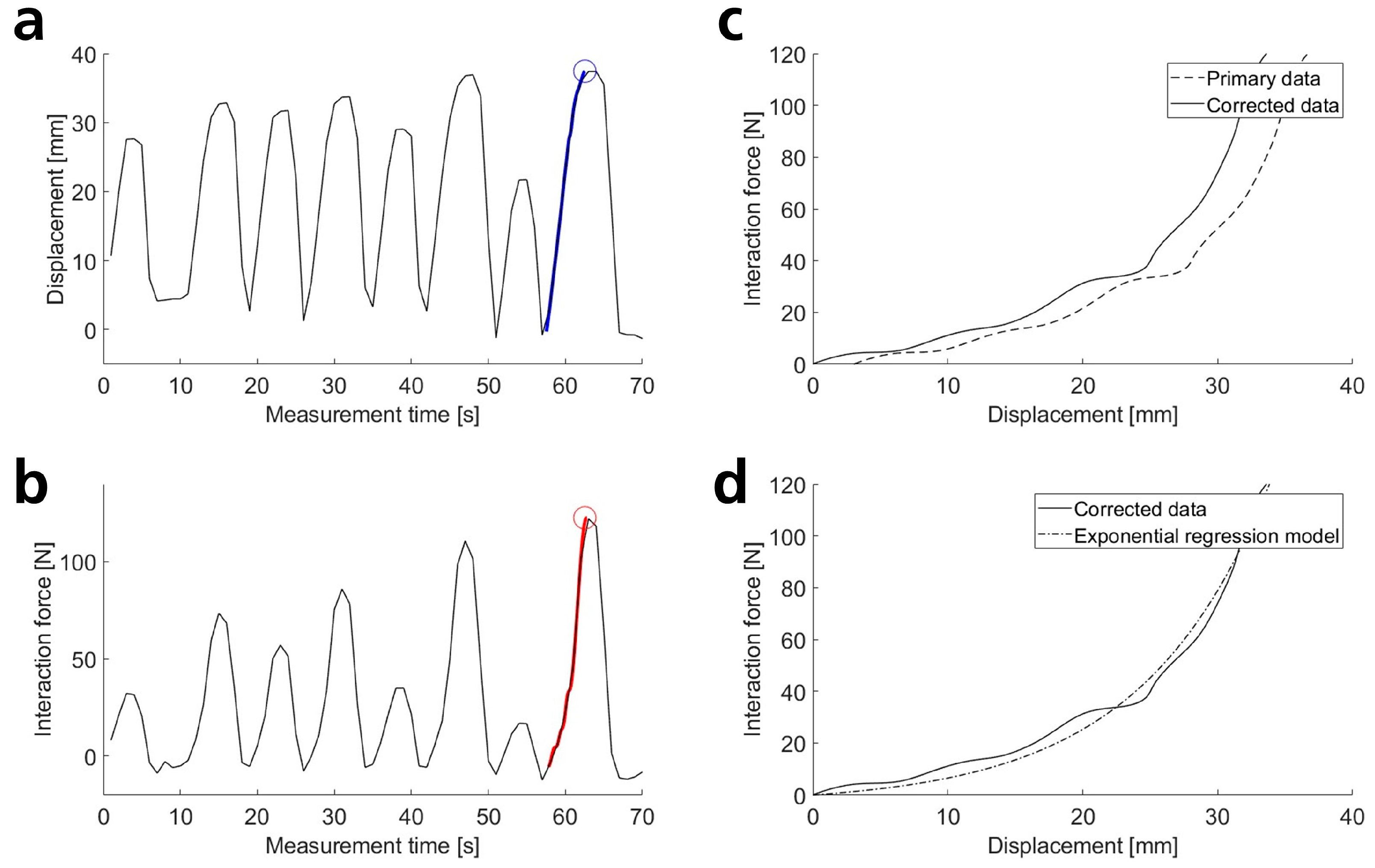
2.3. Data Processing and Analysis
3. Results
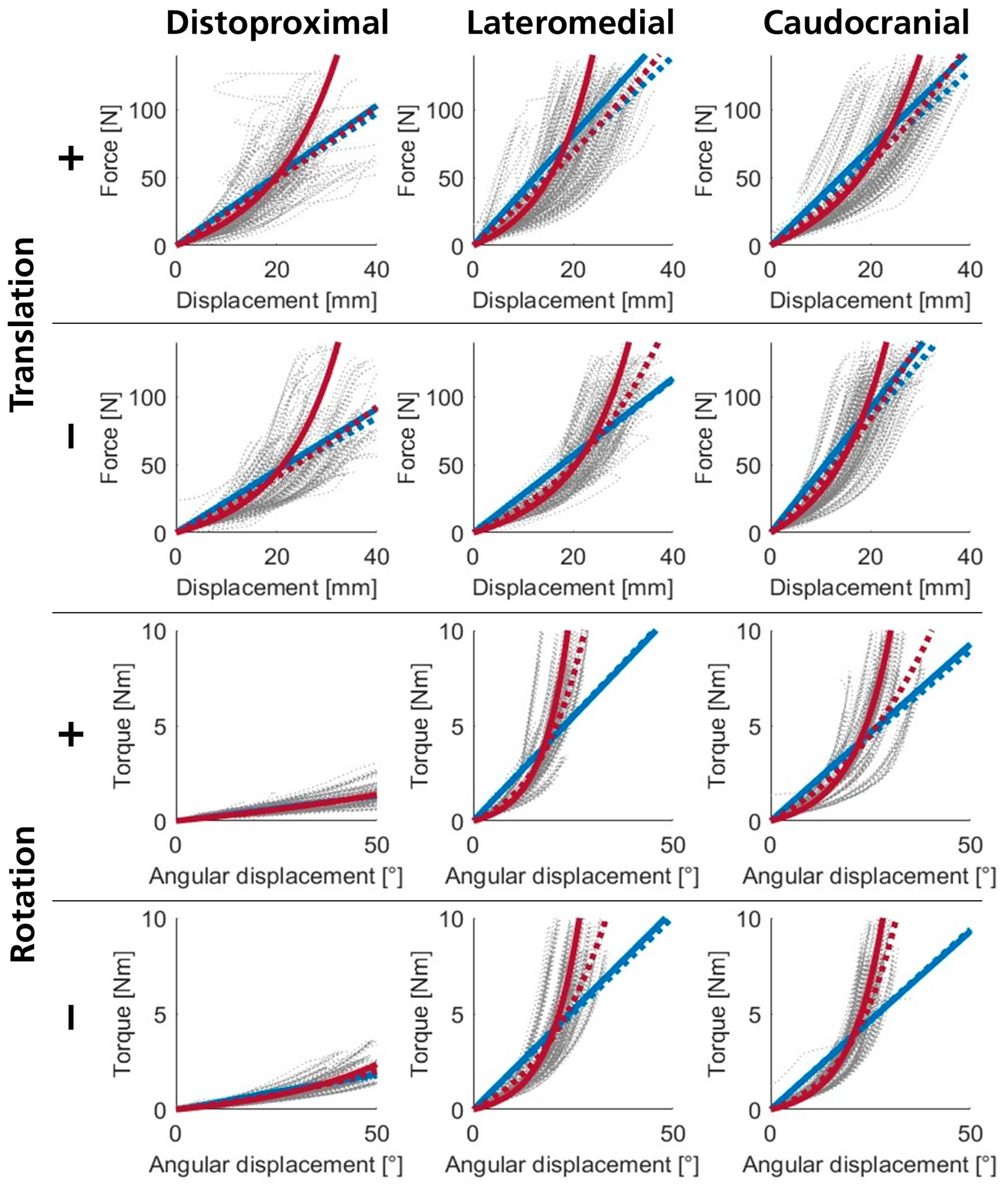
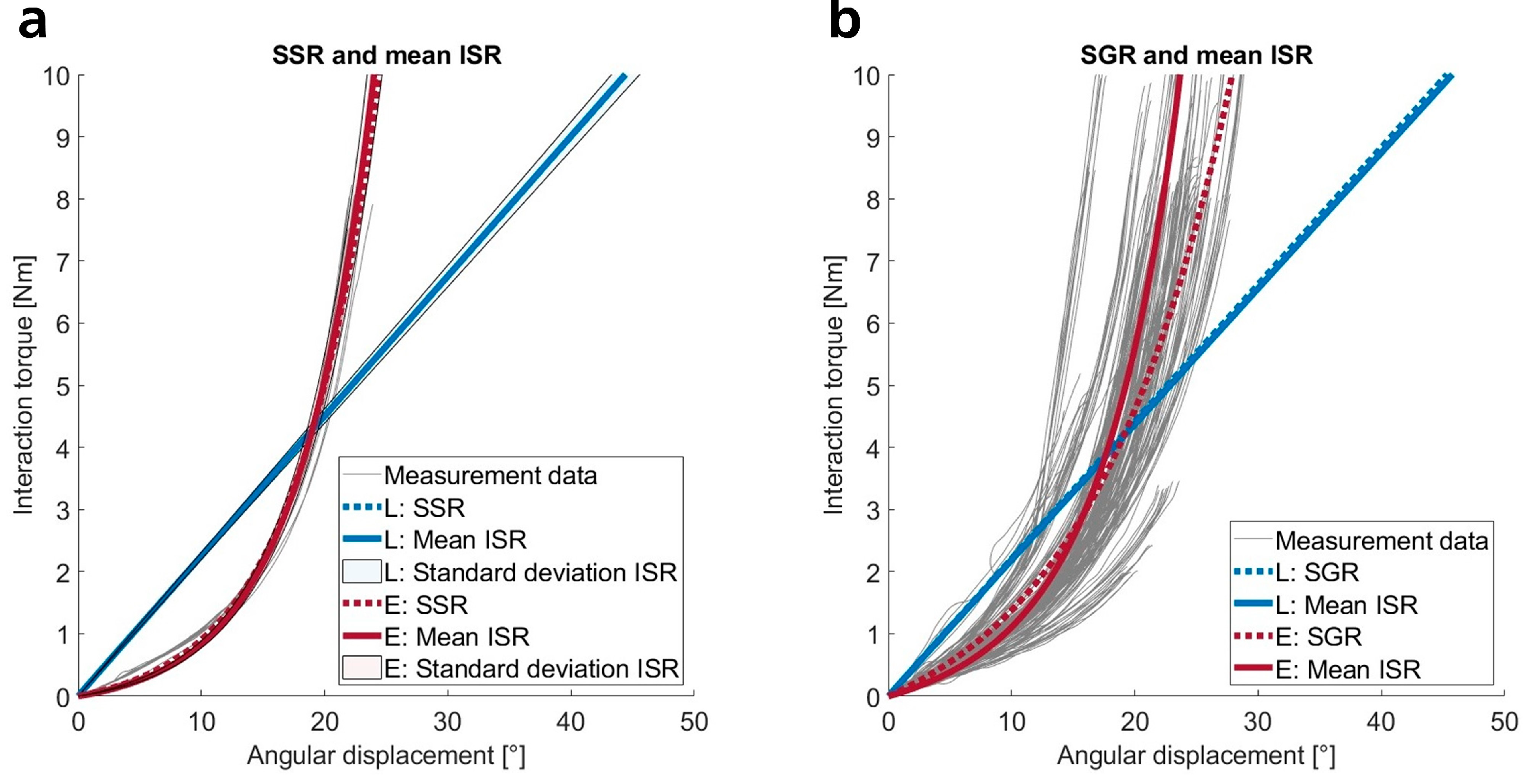
3.1. Load–Displacement Profiles
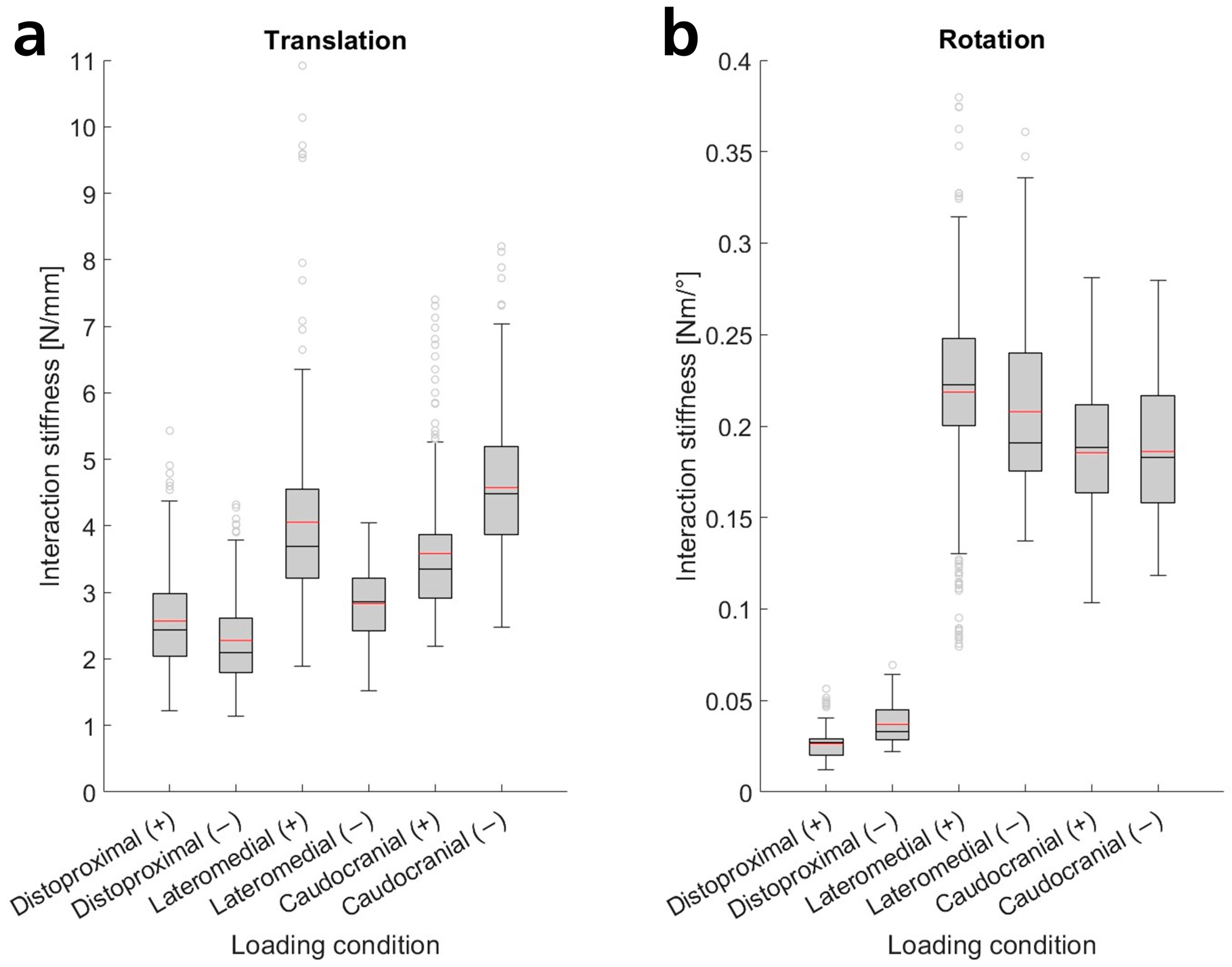
3.2. Interaction Stiffness Magnitudes
4. Discussion
4.1. Load–Displacement Profiles
4.2. Interaction Stiffness Magnitudes
4.3. Limitations and Applicability of Models
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| mocap | Motion capture |
| pHEI | Physical human–exoskeleton interface |
| MHM | Musculoskeletal human models |
| ISR | Individual stimulus regression |
| SSR | Subject-specific regression |
| SGR | Subject group regression |
| BMI | Body mass index |
| CAD | Computer-aided design |
Appendix A
Appendix A.1. Measurement Setup
Appendix A.1.1. Drive Unit
Appendix A.1.2. Physical Human–Exoskeleton Interface
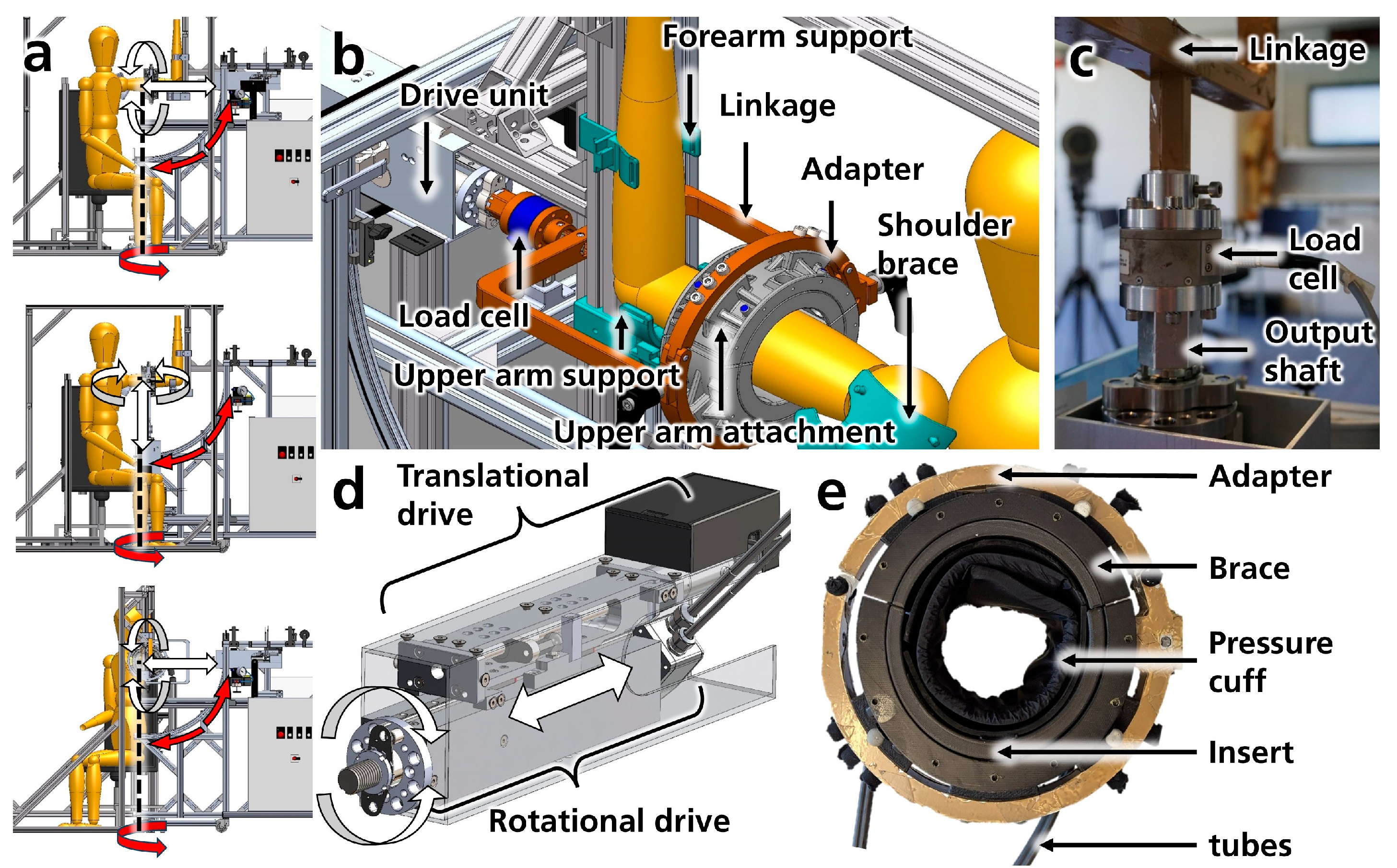
Appendix A.1.3. Support Frame and Fixtures
Appendix A.2. Data Processing
Appendix B
Appendix B.1. Complementary Data for Overall Stiffness Modeling

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Coeff. | Translation | Rotation | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Disto- Proximal | Latero- Medial | Caudo- Cranial | Disto- Proximal | Latero- Medial | Caudo- Cranial | |||||||||
| + | − | + | − | + | − | + | − | + | − | + | − | |||
| Subject group regressions (SGR) | ||||||||||||||
| I | a | 2.4 | 2.1 | 3.5 | 2.8 | 3.2 | 4.2 | 0.03 | 0.04 | 0.22 | 0.20 | 0.18 | 0.19 | |
| E | a | 416 | 144 | 297 | 39 | 117 | 148 | 3.8 | 1.5 | 1.0 | 1.9 | 3.3 | 0.9 | |
| b | 0.005 | 0.012 | 0.010 | 0.041 | 0.021 | 0.022 | 0.006 | 0.017 | 0.085 | 0.055 | 0.034 | 0.081 | ||
| Mean of individual stimulus regressions (ISR) | ||||||||||||||
| I | a | 2.6 | 2.3 | 4.1 | 2.8 | 3.6 | 4.6 | 0.03 | 0.04 | 0.22 | 0.21 | 0.19 | 0.19 | |
| E | a | 18 | 11 | 12 | 11 | 23 | 21 | 2.3 | 0.6 | 0.3 | 0.3 | 0.5 | 0.4 | |
| b | 0.068 | 0.080 | 0.106 | 0.082 | 0.066 | 0.088 | 0.009 | 0.031 | 0.156 | 0.129 | 0.103 | 0.120 | ||
Appendix B.2. Comparison of Modeled and Measured Interaction Stiffnesses
Appendix B.3. Correlations of Interaction Stiffness and Anthropometry
| Var. | Translation | Rotation | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Disto- Proximal | Latero- Medial | Caudo- Cranial | Disto- Proximal | Latero- Medial | Caudo- Cranial | ||||||||
| + | − | + | − | + | − | + | − | + | − | + | − | ||
| Weight | 0.08 | −0.37 | −0.18 | −0.29 | 0.15 | 0.43 | 0.49 | 0.50 | 0.14 | 0.25 | 0.52 | 0.57 | |
| BMI | 0.46 | 0.04 | −0.14 | −0.16 | 0.22 | 0.44 | 0.56 | 0.59 | 0.16 | 0.39 | 0.45 | 0.40 | |
| Fat | 0.29 | 0.30 | 0.00 | −0.20 | −0.15 | 0.27 | 0.03 | −0.03 | 0.16 | 0.06 | 0.12 | −0.17 | |
| Muscle | −0.14 | −0.32 | 0.02 | 0.26 | 0.22 | −0.18 | 0.18 | 0.21 | −0.07 | 0.11 | −0.01 | 0.28 | |
| Sex | −0.09 | −0.49 | 0.07 | 0.09 | 0.36 | 0.24 | 0.46 | 0.43 | 0.10 | 0.25 | 0.31 | 0.53 | |
| Circ. | 0.07 | −0.24 | −0.10 | −0.20 | 0.18 | 0.34 | 0.59 | 0.68 | 0.21 | 0.40 | 0.42 | 0.64 | |
| Height | −0.25 | −0.45 | −0.07 | −0.28 | 0.11 | 0.28 | 0.20 | 0.26 | 0.16 | 0.08 | 0.43 | 0.62 | |
| Age | −0.43 | −0.25 | 0.05 | −0.08 | 0.37 | 0.43 | 0.14 | 0.11 | 0.00 | 0.06 | 0.29 | 0.33 | |
References
- Bai, S.; Gurvinder, S.V.; Sugar, T.G. (Eds.) Wearable Exoskeleton Systems: Design, Control and Applications; Institution of Engineering & Technology: Stevenage, UK, 2018; ISBN 9781785613036. [Google Scholar]
- Gull, M.A.; Bai, S.; Bak, T. A Review on Design of Upper Limb Exoskeletons. Robotics 2020, 9, 16. [Google Scholar] [CrossRef]
- Bogue, R. Robotic exoskeletons: A review of recent progress. Ind. Robot. Int. J. 2015, 42, 5–10. [Google Scholar] [CrossRef]
- Bär, M.; Steinhilber, B.; Rieger, M.A.; Luger, T. The influence of using exoskeletons during occupational tasks on acute physical stress and strain compared to no exoskeleton—A systematic review and meta-analysis. Appl. Ergon. 2021, 94, 103385. [Google Scholar] [CrossRef] [PubMed]
- Theurel, J.; Desbrosses, K. Occupational Exoskeletons: Overview of Their Benefits and Limitations in Preventing Work-Related Musculoskeletal Disorders. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 264–280. [Google Scholar] [CrossRef]
- Massardi, S.; Rodriguez-Cianca, D.; Pinto-Fernandez, D.; Moreno, J.C.; Lancini, M.; Torricelli, D. Characterization and Evaluation of Human-Exoskeleton Interaction Dynamics: A Review. Sensors 2022, 22, 3993. [Google Scholar] [CrossRef] [PubMed]
- Näf, M.B.; Junius, K.; Rossini, M.; Rodriguez-Guerrero, C.; Vanderborght, B.; Lefeber, D. Misalignment Compensation for Full Human-Exoskeleton Kinematic Compatibility: State of the Art and Evaluation. Appl. Mech. Rev. 2018, 70, 050802-1. [Google Scholar] [CrossRef]
- Mallat, R.; Khalil, M.; Venture, G.; Bonnet, V.; Mohammed, S. Human-Exoskeleton Joint Misalignment: A Systematic Review. In Proceedings of the 2019 Fifth International Conference on Advances in Biomedical Engineering (ICABME), Tripoli, Lebanon, 17–19 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4, ISBN 978-1-7281-2314-1. [Google Scholar]
- Schiebl, J.; Tröster, M.; Idoudi, W.; Gneiting, E.; Spies, L.; Maufroy, C.; Schneider, U.; Bauernhansl, T. Model-Based Biomechanical Exoskeleton Concept Optimization for a Representative Lifting Task in Logistics. Int. J. Environ. Res. Public Health 2022, 19, 15533. [Google Scholar] [CrossRef] [PubMed]
- Akiyama, Y.; Okamoto, S.; Yamada, Y.; Ishiguro, K. Measurement of Contact Behavior Including Slippage of Cuff When Using Wearable Physical Assistant Robot. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 784–793. [Google Scholar] [CrossRef] [PubMed]
- Amigo, L.E.; Fernandez, Q.; Giralt, X.; Casals, A.; Amat, J. Study of patient-orthosis interaction forces in rehabilitation therapies. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob 2012), Rome, Italy, 24–27 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1098–1103, ISBN 978-1-4577-1200-5. [Google Scholar]
- Young, A.J.; Ferris, D.P. State of the Art and Future Directions for Lower Limb Robotic Exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 171–182. [Google Scholar] [CrossRef] [PubMed]
- Langlois, K.; Rodriguez-Cianca, D.; Serrien, B.; de Winter, J.; Verstraten, T.; Rodriguez-Guerrero, C.; Vanderborght, B.; Lefeber, D. Investigating the Effects of Strapping Pressure on Human-Robot Interface Dynamics Using a Soft Robotic Cuff. IEEE Trans. Med. Robot. Bionics 2021, 3, 146–155. [Google Scholar] [CrossRef]
- Schiele, A.; van der Helm, F.C.T. Kinematic design to improve ergonomics in human machine interaction. IEEE Trans. Neural Syst. Rehabil. Eng. 2006, 14, 456–469. [Google Scholar] [CrossRef] [PubMed]
- Jarrasse, N.; Morel, G. Connecting a Human Limb to an Exoskeleton. IEEE Trans. Robot. 2012, 28, 697–709. [Google Scholar] [CrossRef]
- Näf, M.B.; Koopman, A.S.; Baltrusch, S.; Rodriguez-Guerrero, C.; Vanderborght, B.; Lefeber, D. Passive Back Support Exoskeleton Improves Range of Motion Using Flexible Beams. Front. Robot. AI 2018, 5, 72. [Google Scholar] [CrossRef] [PubMed]
- Scherb, D.; Wartzack, S.; Miehling, J. Modelling the interaction between wearable assistive devices and digital human models-A systematic review. Front. Bioeng. Biotechnol. 2023, 10, 1044275. [Google Scholar] [CrossRef] [PubMed]
- De Bock, S.; Ampe, T.; Rossini, M.; Tassignon, B.; Lefeber, D.; Rodriguez-Guerrero, C.; Roelands, B.; Geeroms, J.; Meeusen, R.; De Pauw, K. Passive shoulder exoskeleton support partially mitigates fatigue-induced effects in overhead work. Appl. Ergon. 2023, 106, 103903. [Google Scholar] [CrossRef] [PubMed]
- Kopp, V.; Holl, M.; Schalk, M.; Daub, U.; Bances, E.; García, B.; Schalk, I.; Siegert, J.; Schneider, U. Exoworkathlon: A prospective study approach for the evaluation of industrial exoskeletons. Wearable Technol. 2022, 3, e22. [Google Scholar] [CrossRef] [PubMed]
- Mohamed Refai, M.I.; Moya-Esteban, A.; van Zijl, L.; van der Kooij, H.; Sartori, M. Benchmarking commercially available soft and rigid passive back exoskeletons for an industrial workplace. Wearable Technol. 2024, 5, e6. [Google Scholar] [CrossRef]
- Fritzsche, L.; Galibarov, P.E.; Gärtner, C.; Bornmann, J.; Damsgaard, M.; Wall, R.; Schirrmeister, B.; Gonzalez-Vargas, J.; Pucci, D.; Maurice, P.; et al. Assessing the efficiency of exoskeletons in physical strain reduction by biomechanical simulation with AnyBody Modeling System. Wearable Technol. 2021, 2, e6. [Google Scholar] [CrossRef] [PubMed]
- Zhou, X.; Zheng, L. Model-Based Comparison of Passive and Active Assistance Designs in an Occupational Upper Limb Exoskeleton for Overhead Lifting. IISE Trans. Occup. Ergon. Hum. Factors 2021, 9, 167–185. [Google Scholar] [CrossRef] [PubMed]
- Musso, M.; Oliveira, A.S.; Bai, S. Modeling of a Non-Rigid Passive Exoskeleton-Mathematical Description and Musculoskeletal Simulations. Robotics 2022, 11, 147. [Google Scholar] [CrossRef]
- Schmalz, T.; Colienne, A.; Bywater, E.; Fritzsche, L.; Gärtner, C.; Bellmann, M.; Reimer, S.; Ernst, M. A Passive Back-Support Exoskeleton for Manual Materials Handling: Reduction of Low Back Loading and Metabolic Effort during Repetitive Lifting. IISE Trans. Occup. Ergon. Hum. Factors 2022, 10, 7–20. [Google Scholar] [CrossRef] [PubMed]
- Tröster, M.; Wagner, D.; Müller-Graf, F.; Maufroy, C.; Schneider, U.; Bauernhansl, T. Biomechanical Model-Based Development of an Active Occupational Upper-Limb Exoskeleton to Support Healthcare Workers in the Surgery Waiting Room. Int. J. Environ. Res. Public Health 2020, 17, 5140. [Google Scholar] [CrossRef]
- Tröster, M.; Budde, S.; Maufroy, C.; Andersen, M.S.; Rasmussen, J.; Schneider, U.; Bauernhansl, T. Biomechanical Analysis of Stoop and Free-Style Squat Lifting and Lowering with a Generic Back-Support Exoskeleton Model. Int. J. Environ. Res. Public Health 2022, 19, 9040. [Google Scholar] [CrossRef]
- Jensen, E.F.; Raunsbæk, J.; Lund, J.N.; Rahman, T.; Rasmussen, J.; Castro, M.N. Development and simulation of a passive upper extremity orthosis for amyoplasia. J. Rehabil. Assist. Technol. Eng. 2018, 5, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Seiferheld, B.E.; Frost, J.; Krog, M.; Skals, S.; Andersen, M.S. Biomechanical investigation of a passive upper-extremity exoskeleton for manual material handling—A computational parameter study and modelling approach. Int. J. Hum. Factors Model. Simul. 2022, 7, 275–300. [Google Scholar] [CrossRef]
- Popovic, D.B. Dynamics of the self-fitting modular orthosis. IEEE Trans. Robot. Automat. 1990, 6, 200–207. [Google Scholar] [CrossRef]
- Damerau, J.; Jovic, J.; Watanabe, T.; Wolz, U. On the effect of attachment position and compliance of wearable robots on human joint and interface forces. In ECCOMAS Thematic Conference on Multibody Dynamics: Proceedings of the ECCOMAS Thematic Conference on Multibody Dynamics 2015; Barcelona, Spain, 29 June–2 July 2015, CIMNE: Barcelona, Spain, 2015; ISBN 9788494424403. [Google Scholar]
- Zhou, X. Predictive Human-in-the-Loop Simulations for Assistive Exoskeletons. In Proceedings of the ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference—2020, Online, 17–19 August 2020; The American Society of Mechanical Engineers: New York, NY, USA; Red Hook, NY, USA, 2020; ISBN 978-0-7918-8398-3. [Google Scholar]
- Shafiei, M.; Behzadipour, S. The Effects of the Connection Stiffness of Robotic Exoskeletons on the Gait Quality and Comfort. J. Mech. Robot. 2020, 12, 011007. [Google Scholar] [CrossRef]
- Choi, H.; Seo, K.; Hyung, S.; Shim, Y.; Lim, S.-C. Compact Hip-Force Sensor for a Gait-Assistance Exoskeleton System. Sensors 2018, 18, 566. [Google Scholar] [CrossRef] [PubMed]
- Grosu, V.; Grosu, S.; Vanderborght, B.; Lefeber, D.; Rodriguez-Guerrero, C. Multi-Axis Force Sensor for Human-Robot Interaction Sensing in a Rehabilitation Robotic Device. Sensors 2017, 17, 1294. [Google Scholar] [CrossRef] [PubMed]
- Fan, Y.; Yin, Y. Active and Progressive Exoskeleton Rehabilitation Using Multisource Information Fusion From EMG and Force-Position EPP. IEEE Trans. Biomed. Eng. 2013, 60, 3314–3321. [Google Scholar] [CrossRef] [PubMed]
- Tran, H.-T.; Cheng, H.; Lin, X.; Duong, M.-K.; Huang, R. The relationship between physical human-exoskeleton interaction and dynamic factors: Using a learning approach for control applications. Sci. China Inf. Sci. 2014, 57, 1–13. [Google Scholar] [CrossRef]
- Georgarakis, A.-M.; Stämpfli, R.; Wolf, P.; Riener, R.; Duarte, J.E. A Method for Quantifying Interaction Forces in Wearable Robots. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 789–794, ISBN 978-1-5386-8183-1. [Google Scholar]
- Bartenbach, V.; Wyss, D.; Seuret, D.; Riener, R. A lower limb exoskeleton research platform to investigate human-robot interaction. In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics (ICORR 2015), Singapore, 11–14 August 2015; Yu, H., Ed.; IEEE: Piscataway, NJ, USA, 2015; pp. 600–605, ISBN 978-1-4799-1808-9. [Google Scholar]
- Wang, Y.; Qiu, J.; Cheng, H.; Zheng, X. Analysis of Human-Exoskeleton System Interaction for Ergonomic Design. Hum Factors 2023, 65, 909–922. [Google Scholar] [CrossRef] [PubMed]
- Ghonasgi, K.; Yousaf, S.N.; Esmatloo, P.; Deshpande, A.D. A Modular Design for Distributed Measurement of Human-Robot Interaction Forces in Wearable Devices. Sensors 2021, 21, 1445. [Google Scholar] [CrossRef] [PubMed]
- Huysamen, K.; Bosch, T.; de Looze, M.; Stadler, K.S.; Graf, E.; O’Sullivan, L.W. Evaluation of a passive exoskeleton for static upper limb activities. Appl. Ergon. 2018, 70, 148–155. [Google Scholar] [CrossRef] [PubMed]
- Asbeck, A.T.; De Rossi, S.M.M.; Holt, K.G.; Walsh, C.J. A biologically inspired soft exosuit for walking assistance. Int. J. Robot. Res. 2015, 34, 744–762. [Google Scholar] [CrossRef]
- Quinlivan, B.; Asbeck, A.; Wagner, D.; Ranzani, T.; Russo, S.; Walsh, C. Force Transfer Characterization of a Soft Exosuit for Gait Assistance. In Proceedings of the ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference—2015, Boston, MA, USA, 2–5 August 2015; The American Society of Mechanical Engineers: New York, NY, USA, 2016. ISBN 978-0-7918-5712-0. [Google Scholar]
- Schiele, A.; van der Helm, F.C.T. Influence of Attachment Pressure and Kinematic Configuration on pHRI with Wearable Robots. Appl. Bionics Biomech. 2009, 6, 157–173. [Google Scholar] [CrossRef]
- Schiele, A. Ergonomics of exoskeletons: Objective performance metrics. In Proceedings of the World Haptics 2009—Third Joint EuroHaptics conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Salt Lake City, UT, USA, 18–20 March 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 103–108. [Google Scholar] [CrossRef]
- Binder-Markey, B.I.; Sychowski, D.; Lieber, R.L. Systematic review of skeletal muscle passive mechanics experimental methodology. J. Biomech. 2021, 129, 110839. [Google Scholar] [CrossRef] [PubMed]
- Fontanella, C.G.; Toniolo, I.; Foletto, M.; Prevedello, L.; Carniel, E.L. Mechanical Behavior of Subcutaneous and Visceral Abdominal Adipose Tissue in Patients with Obesity. Processes 2022, 10, 1798. [Google Scholar] [CrossRef]
- Joodaki, H.; Panzer, M.B. Skin mechanical properties and modeling: A review. Proc. Inst. Mech. Eng. H 2018, 232, 323–343. [Google Scholar] [CrossRef] [PubMed]
- Alkhouli, N.; Mansfield, J.; Green, E.; Bell, J.; Knight, B.; Liversedge, N.; Tham, J.C.; Welbourn, R.; Shore, A.C.; Kos, K.; et al. The mechanical properties of human adipose tissues and their relationships to the structure and composition of the extracellular matrix. Am. J. Physiol. Endocrinol. Metab. 2013, 305, E1427–E1435. [Google Scholar] [CrossRef] [PubMed]
- Morrow, D.A.; Haut Donahue, T.L.; Odegard, G.M.; Kaufman, K.R. Transversely isotropic tensile material properties of skeletal muscle tissue. J. Mech. Behav. Biomed. Mater. 2010, 3, 124–129. [Google Scholar] [CrossRef] [PubMed]
- Weiss, L.W.; Clark, F.C. Three protocols for measuring subcutaneous fat thickness on the upper extremities. Eur. J. Appl. Physiol. Occup. Physiol. 1987, 56, 217–221. [Google Scholar] [CrossRef] [PubMed]
- Singh, G.; Chanda, A. Mechanical properties of whole-body soft human tissues: A review. Biomed. Mater. 2021, 16, 062004. [Google Scholar] [CrossRef] [PubMed]
- Lanz, T.v.; Wachsmuth, W. (Eds.) Praktische Anatomie: Ein Lehr- und Hilfsbuch der Anatomischen Grundlagen Ärztlichen Handelns, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2004; ISBN 978-3-642-62034-8. [Google Scholar]
- Yousaf, S.N.; Ghonasgi, K.; Esmatloo, P.; Deshpande, A.D. Human-Robot Interaction: Muscle Activation and Angular Location Affect Soft Tissue Stiffness. In Proceedings of the 2022 9th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Seoul, Republic of Korea, 21–24 August 2022; Kim, J., Ed.; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6, ISBN 978-1-6654-5849-8. [Google Scholar]
- Guitteny, S.; Lafon, Y.; Bonnet, V.; Aissaoui, R.; Dumas, R. Dynamic estimation of soft tissue stiffness for use in modeling socket, orthosis or exoskeleton interfaces with lower limb segments. J. Biomech. 2022, 134, 110987. [Google Scholar] [CrossRef] [PubMed]
- ISO 7250-2:2010; DIN Deutsches Institut für Normung e. V. Basic Human Body Measurements for Technological Design: Part 2: Statistical Summaries of Body Measurements from Individual ISO Populations. ISO: Geneva, Switzerland, 2010.
- Maurice, P.; Čamernik, J.; Gorjan, D.; Schirrmeister, B.; Bornmann, J.; Tagliapietra, L.; Latella, C.; Pucci, D.; Fritzsche, L.; Ivaldi, S.; et al. Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Linnenberg, C.; Weidner, R. Industrial exoskeletons for overhead work: Circumferential pressures on the upper arm caused by the physical human-machine-interface. Appl. Ergon. 2022, 101, 103706. [Google Scholar] [CrossRef] [PubMed]
- De Bock, S.; Rossini, M.; Lefeber, D.; Rodriguez-Guerrero, C.; Geeroms, J.; Meeusen, R.; De Pauw, K. An Occupational Shoulder Exoskeleton Reduces Muscle Activity and Fatigue During Overhead Work. IEEE Trans. Biomed. Eng. 2022, 69, 3008–3020. [Google Scholar] [CrossRef] [PubMed]
- Kumari, K.P.; Janaki, C.S.; Lokanadham, S. Midshaft diameter of humerus and its accuracy in sex determination of south Indian population. ijhs 2022, 6, 1577–1583. [Google Scholar] [CrossRef]
- Singh, A.; Nagar, M.; Kumar, A. An Anthropometric Study of the Humerus in Adults. Res. Rev. J. Med. Health Sci. 2014, 3, 77–82. [Google Scholar]
- Gordon, C.C.; Churchill, T.; Clauser, C.E.; Bradtmiller, B.; McConville, J.T.; Tebbetts, I.; Walker, R.A. Anthropometric Survey of U.S. Army Personnel: Summary Statistics, Interim Report for 1988. Natick, MA, USA, 1989. Available online: https://apps.dtic.mil/sti/html/tr/ADA209600/ (accessed on 23 June 2025).
- Mukaka, M.M. A guide to appropriate use of correlation coefficient in medical research. Malawi Med. J. 2012, 24, 69–71. [Google Scholar] [PubMed]
- Blaak, E. Gender differences in fat metabolism. Curr. Opin. Clin. Nutr. Metab. Care 2001, 4, 499–502. [Google Scholar] [CrossRef] [PubMed]
- Palmer, A.K.; Jensen, M.D. Metabolic changes in aging humans: Current evidence and therapeutic strategies. J. Clin. Invest. 2022, 132, e158451. [Google Scholar] [CrossRef] [PubMed]
| Model | Translation | Rotation | Mean | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Disto- Proximal | Latero- Medial | Caudo- Cranial | Disto- Proximal | Latero- Medial | Caudo- Cranial | ||||||||||
| + | − | + | − | + | − | + | − | + | − | + | − | ||||
| Individual stimulus regression (ISR) | |||||||||||||||
| L | 0.87 | 0.88 | 0.84 | 0.86 | 0.86 | 0.88 | 0.96 | 0.92 | 0.81 | 0.79 | 0.82 | 0.80 | 0.86 | ||
| Q | 0.96 | 0.99 | 0.98 | 0.98 | 0.99 | 0.99 | 0.99 | 0.99 | 0.98 | 0.97 | 0.97 | 0.97 | 0.98 | ||
| E | 0.96 | 0.99 | 0.99 | 0.98 | 0.99 | 0.99 | 0.98 | 1.00 | 1.00 | 0.99 | 0.99 | 0.99 | 0.99 | ||
| P | 0.96 | 0.99 | 0.99 | 0.98 | 0.99 | 0.99 | 0.99 | 0.99 | 0.99 | 0.98 | 0.98 | 0.98 | 0.98 | ||
| Subject-specific regression (SSR) | |||||||||||||||
| L | 0.83 | 0.87 | 0.77 | 0.84 | 0.78 | 0.87 | 0.95 | 0.91 | 0.80 | 0.78 | 0.81 | 0.79 | 0.83 | ||
| Q | 0.88 | 0.94 | 0.91 | 0.95 | 0.91 | 0.96 | 0.98 | 0.97 | 0.97 | 0.96 | 0.96 | 0.96 | 0.95 | ||
| E | 0.87 | 0.94 | 0.88 | 0.95 | 0.89 | 0.96 | 0.96 | 0.97 | 0.99 | 0.98 | 0.98 | 0.98 | 0.95 | ||
| P | 0.88 | 0.94 | 0.91 | 0.95 | 0.91 | 0.96 | 0.97 | 0.97 | 0.98 | 0.97 | 0.97 | 0.98 | 0.95 | ||
| Subject group regression (SGR) | |||||||||||||||
| L | 0.67 | 0.67 | 0.67 | 0.78 | 0.72 | 0.76 | 0.70 | 0.75 | 0.71 | 0.70 | 0.71 | 0.71 | 0.71 | ||
| Q | 0.67 | 0.67 | 0.67 | 0.84 | 0.74 | 0.77 | 0.70 | 0.78 | 0.83 | 0.78 | 0.76 | 0.85 | 0.76 | ||
| E | 0.67 | 0.67 | 0.67 | 0.83 | 0.74 | 0.77 | 0.70 | 0.77 | 0.83 | 0.77 | 0.75 | 0.85 | 0.75 | ||
| P | 0.68 | 0.68 | 0.67 | 0.84 | 0.75 | 0.78 | 0.70 | 0.78 | 0.83 | 0.78 | 0.76 | 0.85 | 0.76 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schiebl, J.; Elsner, N.; Birchinger, P.; Aschenbrenner, J.; Maufroy, C.; Tröster, M.; Schneider, U.; Bauernhansl, T. Quantification of the Mechanical Properties in the Human–Exoskeleton Upper Arm Interface During Overhead Work Postures in Healthy Young Adults. Sensors 2025, 25, 4605. https://doi.org/10.3390/s25154605
Schiebl J, Elsner N, Birchinger P, Aschenbrenner J, Maufroy C, Tröster M, Schneider U, Bauernhansl T. Quantification of the Mechanical Properties in the Human–Exoskeleton Upper Arm Interface During Overhead Work Postures in Healthy Young Adults. Sensors. 2025; 25(15):4605. https://doi.org/10.3390/s25154605
Chicago/Turabian StyleSchiebl, Jonas, Nawid Elsner, Paul Birchinger, Jonas Aschenbrenner, Christophe Maufroy, Mark Tröster, Urs Schneider, and Thomas Bauernhansl. 2025. "Quantification of the Mechanical Properties in the Human–Exoskeleton Upper Arm Interface During Overhead Work Postures in Healthy Young Adults" Sensors 25, no. 15: 4605. https://doi.org/10.3390/s25154605
APA StyleSchiebl, J., Elsner, N., Birchinger, P., Aschenbrenner, J., Maufroy, C., Tröster, M., Schneider, U., & Bauernhansl, T. (2025). Quantification of the Mechanical Properties in the Human–Exoskeleton Upper Arm Interface During Overhead Work Postures in Healthy Young Adults. Sensors, 25(15), 4605. https://doi.org/10.3390/s25154605