
A Survey on Design and Control Methodologies of High- Torque-Density Joints for Compliant Lower-Limb Exoskeleton

 , , , , , and
, , , , , and 
Abstract
1. Introduction
2. Design Requirements for Joints of Low-Limb Exoskeleton
3. Mechanism Design of Lower-Limb Exoskeleton Joint
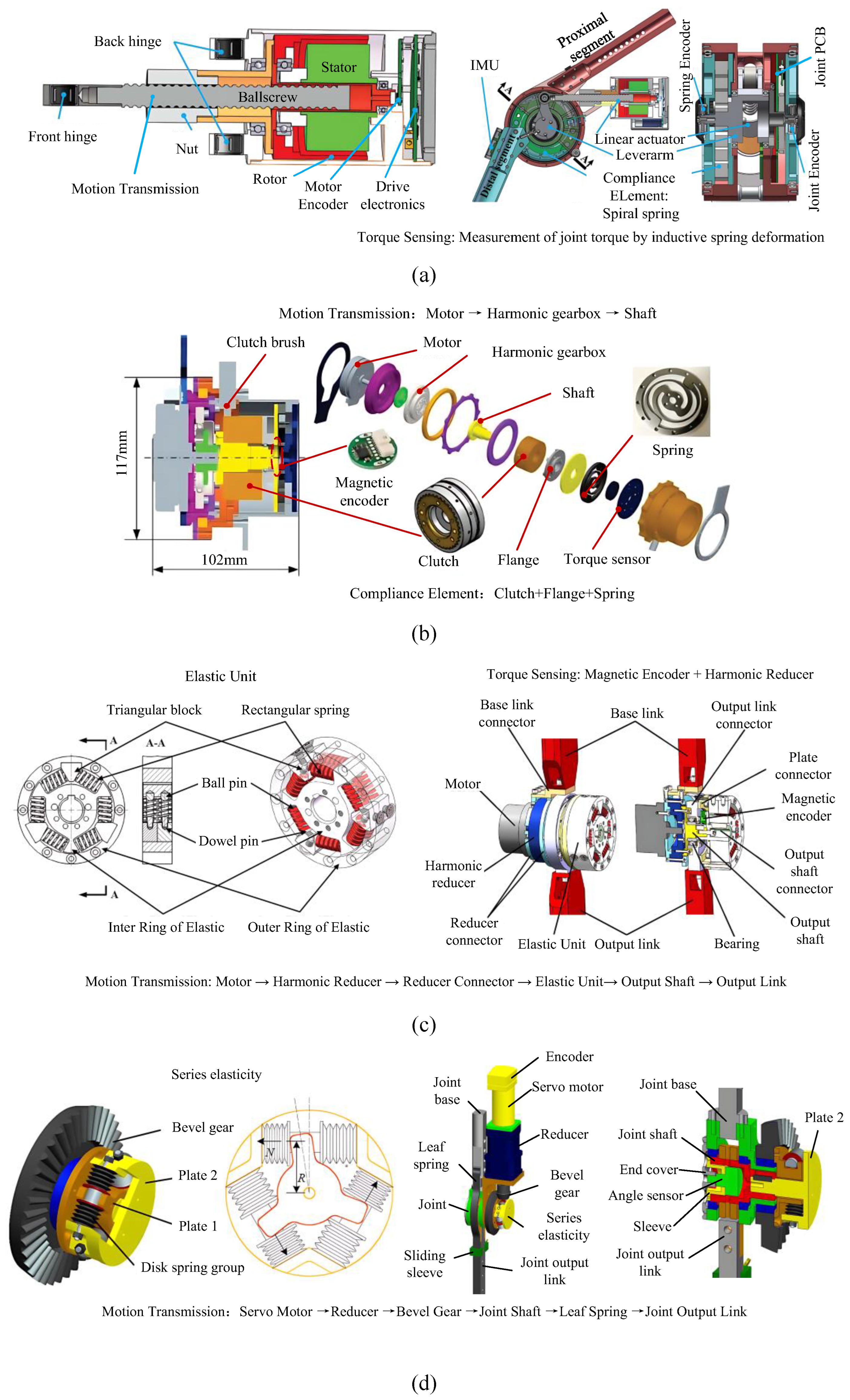
3.1. Joints with Harmonic Drives
3.2. Other Series, Parallel or Hybrid Elastic Joints
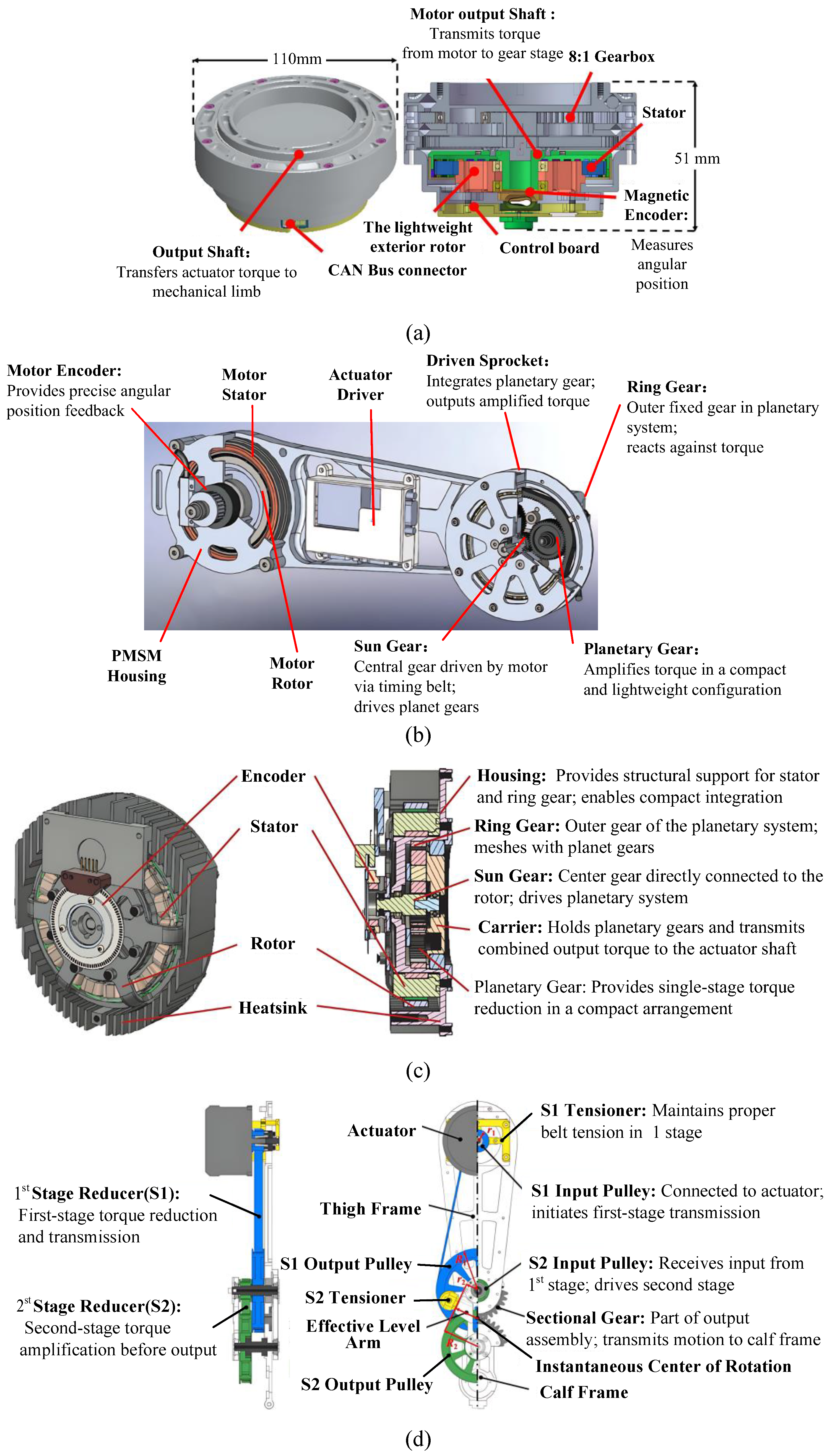
3.3. Quasi-Direct Actuators
4. Motor Design of Lower-Limb Exoskeleton Joints
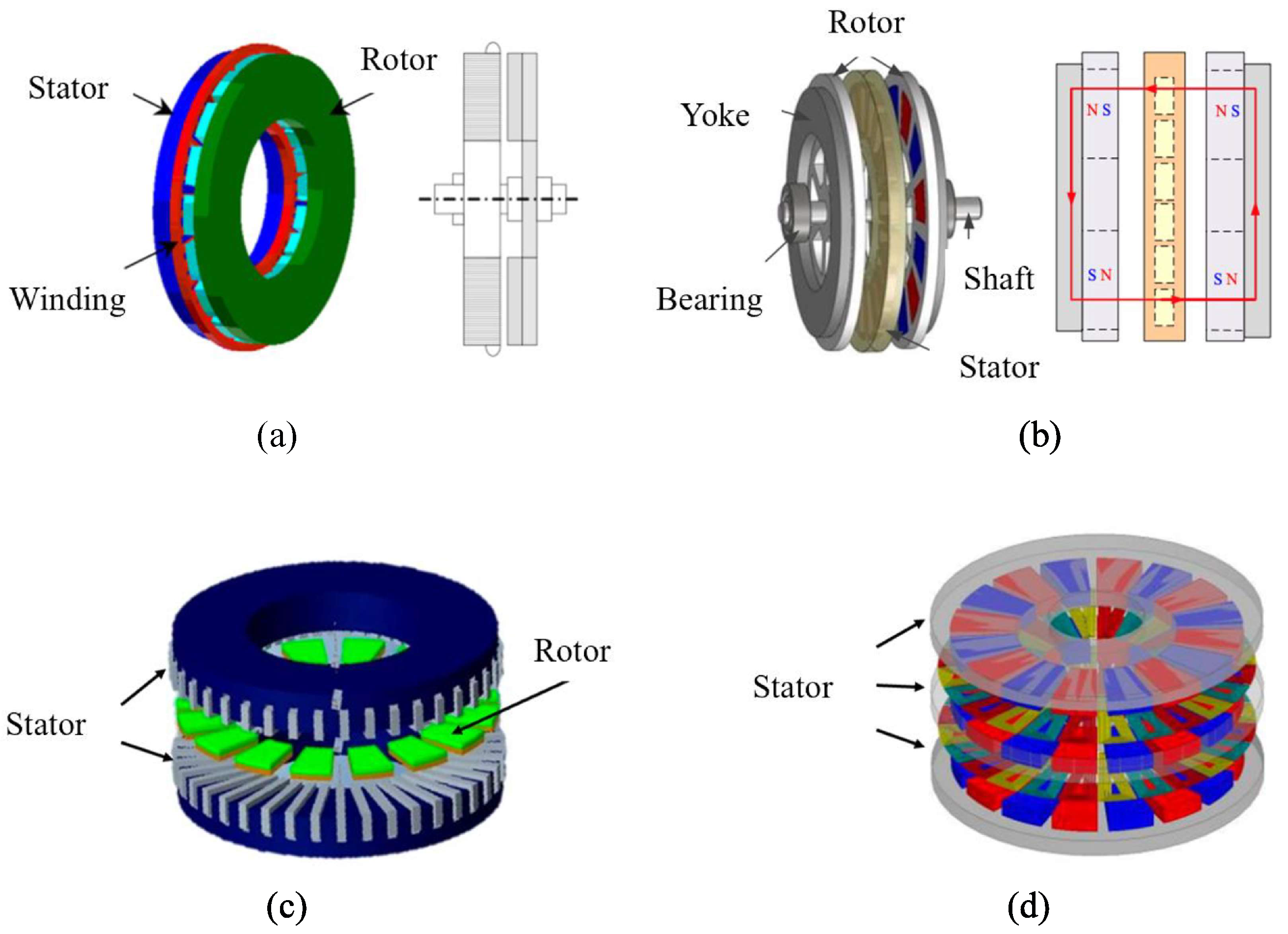
4.1. Topology
4.2. Performance Optimization
5. Compliant Control of the Lower-Limb Exoskeleton Joint
5.1. Impedance Control
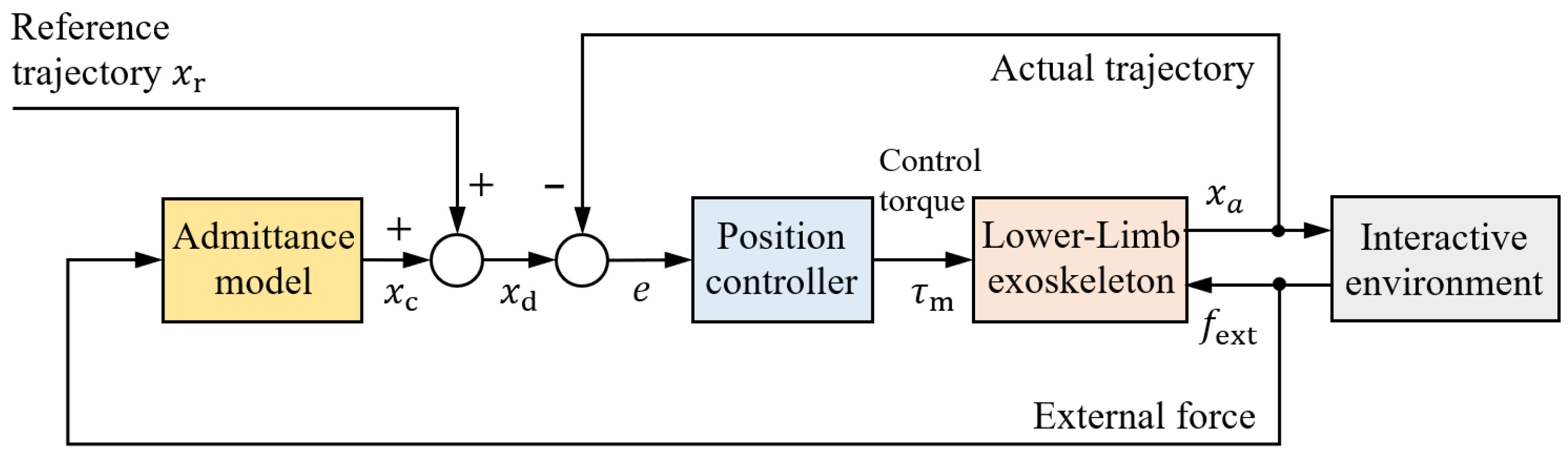
5.2. Admittance Control
5.3. Adaptive Impedance/Admittance Control
5.4. Hybrid Impedance/Admittance Control
5.5. Intent Estimation-Based Compliant Control
5.6. Skill Learning-Based Compliant Control
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ACSM | Alternative Current Servo Motor |
| AFIR | Axial Flux Internal Rotor |
| AFPMM | Axial Flux Permanent Magnet Machine |
| BLDC | Brushless Direct Current |
| DC | Direct Current |
| EMG | Electromyography |
| PMSM | Permanent Magnetic Synchronous Motor |
| LPTN | Lumped Parameter Thermal Network |
| L-SEA | Linear Series Elastic Actuation |
| PCM | Phase-Change Material |
| PEA | Parallel Elastic Actuator |
| PWM | Pulse Width Modulation |
| RFPMM | Radial Flux Permanent Magnet Machine |
| R-SEA | Rotary Series Elastic Actuation |
| UEST | University of Electronics Science and Technology |
| USTC | University of Science and Technology China |
References
- Pinto-Fernandez, D.; Torricelli, D.; del Carmen Sanchez-Villamanan, M.; Aller, F.; Mombaur, K.; Conti, R.; Vitiello, N.; Moreno, J.C.; Pons, J.L. Performance evaluation of lower limb exoskeletons: A systematic review. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1573–1583. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Xu, D.; Zhao, S.; Yu, Z.; Huang, Y.; Ruan, L.; Zhou, Z.; Wang, Q. Level-Ground and Stair Adaptation for Hip Exoskeletons Based on Continuous Locomotion Mode Perception. Cyborg Bionic Syst. 2025, 6, 0248. [Google Scholar] [CrossRef] [PubMed]
- Yu, F.; Liu, Y.; Wu, Z.; Tan, M.; Yu, J. Adaptive gait training of a lower limb rehabilitation robot based on human–robot interaction force measurement. Cyborg Bionic Syst. 2024, 5, 0115. [Google Scholar] [CrossRef]
- Sun, Y.; Tang, Y.; Zheng, J.; Dong, D.; Chen, X.; Bai, L. From sensing to control of lower limb exoskeleton: A systematic review. Annu. Rev. Control. 2022, 53, 83–96. [Google Scholar] [CrossRef]
- Lo, H.S.; Xie, S.Q. Exoskeleton robots for upper-limb rehabilitation: State of the art and future prospects. Med. Eng. Phys. 2012, 34, 261–268. [Google Scholar] [CrossRef]
- Zhou, L.; Chen, W.; Chen, W.; Bai, S.; Zhang, J.; Wang, J. Design of a passive lower limb exoskeleton for walking assistance with gravity compensation. Mech. Mach. Theory 2020, 150, 103840. [Google Scholar] [CrossRef]
- Hattori, A. Design of a High Torque Density Modular Actuator for Dynamic Robots. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2020. [Google Scholar]
- Barjuei, E.S.; Ardakani, M.M.G.; Caldwell, D.G.; Sanguineti, M.; Ortiz, J. Optimal selection of motors and transmissions in back-support exoskeleton applications. IEEE Trans. Med. Robot. Bionics 2020, 2, 320–330. [Google Scholar] [CrossRef]
- De Looze, M.P.; Bosch, T.; Krause, F.; Stadler, K.S.; O’sullivan, L.W. Exoskeletons for industrial application and their potential effects on physical work load. Ergonomics 2016, 59, 671–681. [Google Scholar] [CrossRef]
- Huang, Y.; Zhou, T.; Dong, J.; Guo, B. An overview on developments and researches of axial flux permanent magnet machines. Zhongguo Dianji Gongcheng Xuebao/Proceedings Chin. Soc. Electr. Eng. 2015, 35, 192–205. [Google Scholar]
- Moeller, T.; Moehler, F.; Krell-Roesch, J.; Dežman, M.; Marquardt, C.; Asfour, T.; Stein, T.; Woll, A. Use of lower limb exoskeletons as an assessment tool for human motor performance: A systematic review. Sensors 2023, 23, 3032. [Google Scholar] [CrossRef]
- Shi, D.; Zhang, W.; Zhang, W.; Ding, X. A review on lower limb rehabilitation exoskeleton robots. Chin. J. Mech. Eng. 2019, 32, 1–11. [Google Scholar] [CrossRef]
- Pamungkas, D.S.; Caesarendra, W.; Soebakti, H.; Analia, R.; Susanto, S. Overview: Types of lower limb exoskeletons. Electronics 2019, 8, 1283. [Google Scholar] [CrossRef]
- Scanlon, V.C.; Sanders, T. Essentials of Anatomy and Physiology; FA Davis: Philadelphia, PA, USA, 2018. [Google Scholar]
- Pereira, J.A.; Pleguezuelos, E.; Merí, A.; Molina-Ros, A.; Molina-Tomás, M.C.; Masdeu, C. Effectiveness of using blended learning strategies for teaching and learning human anatomy. Med. Educ. 2007, 41, 189–195. [Google Scholar] [CrossRef] [PubMed]
- Nuckols, R.W.; Takahashi, K.Z.; Farris, D.J.; Mizrachi, S.; Riemer, R.; Sawicki, G.S. Mechanics of walking and running up and downhill: A joint-level perspective to guide design of lower-limb exoskeletons. PLoS ONE 2020, 15, e0231996. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, W.; Shi, D.; Geng, Y. Design and control of an adaptive knee joint exoskeleton mechanism with buffering function. Sensors 2021, 21, 8390. [Google Scholar] [CrossRef]
- Young, A.J.; Ferris, D.P. State of the art and future directions for lower limb robotic exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 25, 171–182. [Google Scholar] [CrossRef]
- Kawamoto, H.; Lee, S.; Kanbe, S.; Sankai, Y. Power assist method for HAL-3 using EMG-based feedback controller. In Proceedings of the SMC’03 Conference Proceedings. 2003 IEEE International Conference on Systems, Man and Cybernetics. Conference Theme-System Security and Assurance (Cat. No. 03CH37483), Washington, DC, USA, 8 October 2003; IEEE: New York, NY, USA, 2003; Volume 2, pp. 1648–1653. [Google Scholar]
- Lu, R.; Li, Z.; Su, C.Y.; Xue, A. Development and learning control of a human limb with a rehabilitation exoskeleton. IEEE Trans. Ind. Electron. 2013, 61, 3776–3785. [Google Scholar] [CrossRef]
- Kiguchi, K.; Yokomine, Y. Walking assist for a stroke survivor with a power-assist exoskeleton. In Proceedings of the 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), San Diego, CA, USA, 5–8 October 2014; IEEE: New York, NY, USA, 2014; pp. 1888–1892. [Google Scholar]
- Lee, S.H.; Lee, H.J.; Chang, W.H.; Choi, B.O.; Lee, J.; Kim, J.; Ryu, G.H.; Kim, Y.H. Gait performance and foot pressure distribution during wearable robot-assisted gait in elderly adults. J. Neuroeng. Rehabil. 2017, 14, 123. [Google Scholar] [CrossRef]
- Wei, Q.; Li, Z.; Zhao, K.; Kang, Y.; Su, C.Y. Synergy-based control of assistive lower-limb exoskeletons by skill transfer. IEEE/ASME Trans. Mechatron. 2019, 25, 705–715. [Google Scholar] [CrossRef]
- Zheng, T.; Liu, G.; Wang, T.; Zhang, Y.; Zhao, J.; Zhu, Y. Development of a compact lower-limb exoskeleton for walking assistance: A case study. J. Mech. Med. Biol. 2019, 19, 1940039. [Google Scholar] [CrossRef]
- Kim, J.H.; Shim, M.; Ahn, D.H.; Son, B.J.; Kim, S.Y.; Kim, D.Y.; Baek, Y.S.; Cho, B.K. Design of a knee exoskeleton using foot pressure and knee torque sensors. Int. J. Adv. Robot. Syst. 2015, 12, 112. [Google Scholar] [CrossRef]
- Rouse, E.J.; Mooney, L.M.; Herr, H.M. Clutchable series-elastic actuator: Implications for prosthetic knee design. Int. J. Robot. Res. 2014, 33, 1611–1625. [Google Scholar] [CrossRef]
- Pratt, J.; Krupp, B.; Morse, C. Series elastic actuators for high fidelity force control. Ind. Robot. Int. J. 2002, 29, 234–241. [Google Scholar] [CrossRef]
- Robinson, D.W.; Pratt, J.E.; Paluska, D.J.; Pratt, G.A. Series elastic actuator development for a biomimetic walking robot. In Proceedings of the 1999 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (Cat. No. 99TH8399), Atlanta, GA, USA, 19–23 September 1999; IEEE: New York, NY, USA, 1999; pp. 561–568. [Google Scholar]
- Pratt, J.E.; Krupp, B.T.; Morse, C.J.; Collins, S.H. The RoboKnee: An exoskeleton for enhancing strength and endurance during walking. In Proceedings of the IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA’04. 2004, New Orleans, LA, USA, 26 April–1 May 2004; IEEE: New York, NY, USA, 2004; Volume 3, pp. 2430–2435. [Google Scholar]
- Sergi, F.; Accoto, D.; Carpino, G.; Tagliamonte, N.L.; Guglielmelli, E. Design and characterization of a compact rotary series elastic actuator for knee assistance during overground walking. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012; IEEE: New York, NY, USA, 2012; pp. 1931–1936. [Google Scholar]
- Grün, M.; Müller, R.; Konigorski, U. Model based control of series elastic actuators. In Proceedings of the 2012 4th IEEE Ras & EMBS International Conference on Biomedical Robotics and Biomechatronics (Biorob), Rome, Italy, 24–27 June 2012; IEEE: New York, NY, USA, 2012; pp. 538–543. [Google Scholar]
- Hurst, J.W.; Chestnutt, J.E.; Rizzi, A.A. The actuator with mechanically adjustable series compliance. IEEE Trans. Robot. 2010, 26, 597–606. [Google Scholar] [CrossRef]
- Yildirim, M.C.; Kansizoglu, A.T.; Sendur, P.; Ugurlu, B. High power series elastic actuator development for torque-controlled exoskeletons. In Proceedings of the International Symposium on Wearable Robotics, Pisa, Italy, 16–20 October 2018; Springer: Cham, Switzerland, 2018; pp. 70–74. [Google Scholar]
- Wang, S.; Meijneke, C.; van der Kooij, H. Modeling, design, and optimization of Mindwalker series elastic joint. In Proceedings of the 2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 24–26 June 2013; IEEE: New York, NY, USA, 2013; pp. 1–8. [Google Scholar]
- Zhang, T.; Xia, J. Development of a Clutchable series elastic actuator for robotic hip exoskeleton. In Proceedings of the 2019 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Bangkok, Thailand, 18–20 November 2019; IEEE: New York, NY, USA, 2019; pp. 269–274. [Google Scholar]
- Chen, C.; Du, Z.; He, L.; Huang, L.; Wang, J.; Shi, Y.; Xu, G.; Si, F.; Xiao, T.; Wu, D.; et al. Design of a series elastic actuator with double-layer parallel spring for lower limb exoskeletons. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; IEEE: New York, NY, USA, 2019; pp. 2013–2018. [Google Scholar]
- Li, Y.; Li, Z.; Penzlin, B.; Tang, Z.; Liu, Y.; Guan, X.; Ji, L.; Leonhardt, S. Design of the clutched variable parallel elastic actuator (CVPEA) for lower limb exoskeletons. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; IEEE: New York, NY, USA, 2019; pp. 4436–4439. [Google Scholar]
- Bacek, T.; Moltedo, M.; Rodriguez-Guerrero, C.; Geeroms, J.; Vanderborght, B.; Lefeber, D. Design and evaluation of a torque-controllable knee joint actuator with adjustable series compliance and parallel elasticity. Mech. Mach. Theory 2018, 130, 71–85. [Google Scholar] [CrossRef]
- Zhu, Y.; Yang, J.; Jin, H.; Zang, X.; Zhao, J. Design and evaluation of a parallel-series elastic actuator for lower limb exoskeletons. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; IEEE: New York, NY, USA, 2014; pp. 1335–1340. [Google Scholar]
- Pratt, G.A.; Williamson, M.M. Series elastic actuators. In Proceedings of the Proceedings 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human Robot Interaction and Cooperative Robots, Pittsburgh, PA, USA, 5–9 August 1995; IEEE: New York, NY, USA, 1995; Volume 1, pp. 399–406. [Google Scholar]
- Krimsky, E.; Collins, S.H. Optimal control of an energy-recycling actuator for mobile robotics applications. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; IEEE: New York, NY, USA, 2020; pp. 3559–3565. [Google Scholar]
- Wolf, S.; Grioli, G.; Eiberger, O.; Friedl, W.; Grebenstein, M.; Höppner, H.; Burdet, E.; Caldwell, D.G.; Carloni, R.; Catalano, M.G.; et al. Variable stiffness actuators: Review on design and components. IEEE/ASME Trans. Mechatron. 2015, 21, 2418–2430. [Google Scholar] [CrossRef]
- Xu, Y.; Guo, K.; Sun, J.; Li, J. Design, modeling and control of a reconfigurable variable stiffness actuator. Mech. Syst. Signal Process. 2021, 160, 107883. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Yuan, Z.; Liu, J. Design and analysis of spring parallel variable stiffness actuator based on antagonistic principle. Mech. Mach. Theory 2019, 140, 44–58. [Google Scholar] [CrossRef]
- Shao, Y.; Zhang, W.; Su, Y.; Ding, X. Design and optimisation of load-adaptive actuator with variable stiffness for compact ankle exoskeleton. Mech. Mach. Theory 2021, 161, 104323. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, Y.; Chen, K.; Wang, Y.; Wu, Y. Novel torsional spring with corrugated flexible units for series elastic actuators for cooperative robots. J. Mech. Sci. Technol. 2022, 36, 3131–3142. [Google Scholar] [CrossRef]
- Xu, J.; Xu, L.; Li, Y.; Peng, C.; Liu, J.; Xu, C.; Chen, S.; Liu, Y.; Chen, J. Design and implementation of the lower extremity robotic exoskeleton with magnetorheological actuators. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; IEEE: New York, NY, USA, 2019; pp. 1294–1299. [Google Scholar]
- Burnett, J.K.; Choi, Y.T.; Li, H.; Wereley, N.M.; Miller, R.H.; Shim, J.K. Vibration suppression of a composite prosthetic foot using piezoelectric shunt damping: Implications to vibration-induced cumulative trauma. IEEE Trans. Biomed. Eng. 2021, 68, 2741–2751. [Google Scholar] [CrossRef]
- Baser, O.; Kizilhan, H.; Kilic, E. Employing variable impedance (stiffness/damping) hybrid actuators on lower limb exoskeleton robots for stable and safe walking trajectory tracking. J. Mech. Sci. Technol. 2020, 34, 2597–2607. [Google Scholar] [CrossRef]
- Katz, B.; Di Carlo, J.; Kim, S. Mini cheetah: A platform for pushing the limits of dynamic quadruped control. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: New York, NY, USA, 2019; pp. 6295–6301. [Google Scholar]
- Yu, S.; Huang, T.H.; Yang, X.; Jiao, C.; Yang, J.; Chen, Y.; Yi, J.; Su, H. Quasi-direct drive actuation for a lightweight hip exoskeleton with high backdrivability and high bandwidth. IEEE/ASME Trans. Mechatron. 2020, 25, 1794–1802. [Google Scholar] [CrossRef] [PubMed]
- Huang, T.H.; Zhang, S.; Yu, S.; MacLean, M.K.; Zhu, J.; Di Lallo, A.; Jiao, C.; Bulea, T.C.; Zheng, M.; Su, H. Modeling and stiffness-based continuous torque control of lightweight quasi-direct-drive knee exoskeletons for versatile walking assistance. IEEE Trans. Robot. 2022, 38, 1442–1459. [Google Scholar] [CrossRef]
- Lv, G.; Zhu, H.; Gregg, R.D. On the design and control of highly backdrivable lower-limb exoskeletons: A discussion of past and ongoing work. IEEE Control. Syst. Mag. 2018, 38, 88–113. [Google Scholar] [CrossRef] [PubMed]
- Zhu, H.; Nesler, C.; Divekar, N.; Peddinti, V.; Gregg, R.D. Design principles for compact, backdrivable actuation in partial-assist powered knee orthoses. IEEE/ASME Trans. Mechatron. 2021, 26, 3104–3115. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Li, X.; Huang, T.H.; Yu, S.; Li, Y.; Chen, T.; Carriero, A.; Oh-Park, M.; Su, H. Comfort-centered design of a lightweight and backdrivable knee exoskeleton. IEEE Robot. Autom. Lett. 2018, 3, 4265–4272. [Google Scholar] [CrossRef]
- Hunter, I.W.; Hollerbach, J.M.; Ballantyne, J. A comparative analysis of actuator technologies for robotics. Robot. Rev. 1991, 2, 299–342. [Google Scholar]
- Du, Q.; Zhang, T.; Yang, G.; Chen, C.Y.; Wang, W.; Zhang, C. A 3K Planetary Gear Train with a flexure-based anti-backlash carrier for collaborative robots. Mech. Mach. Theory 2024, 191, 105495. [Google Scholar] [CrossRef]
- Aydin, M.; Huang, S.; Lipo, T.A. Axial flux permanent magnet disc machines: A review. Proc. Conf. Rec. Speedam 2004, 8, 61–71. [Google Scholar]
- Tang, R. Theory and Design of Modern Permanent Magnet Machines; China Machine Press: Beijing, China, 2016. [Google Scholar]
- Taran, N.; Heins, G.; Rallabandi, V.; Patterson, D.; Ionel, D.M. Torque production capability of axial flux machines with single and double rotor configurations. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; IEEE: New York, NY, USA, 2018; pp. 7336–7341. [Google Scholar]
- Zhang, Y.; Liu, N.; Guo, S.; Tong, J.; Zhou, Q. Analysis and design of ironless axial flux permanent magnet synchronous motor. In Proceedings of the 2018 10th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 25–26 August 2018; IEEE: New York, NY, USA, 2018; Volume 2, pp. 170–173. [Google Scholar]
- Pan, Z.; Zhao, J.; Fang, S.; Yu, Z. Topology development and performance analysis of a dual-stator permanent magnet arc motor. IEEE Trans. Transp. Electrif. 2022, 9, 2509–2523. [Google Scholar] [CrossRef]
- Wang, X.; Hu, C.; Zhao, M.; Wu, L.; Zhou, S. Design of multi-layer PCB coreless axial permanent magnet synchronous motor. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; IEEE: New York, NY, USA, 2019; pp. 1–4. [Google Scholar]
- Xu, J.; Liu, B.; Li, K.; Feng, Y.; Zheng, H.; Gao, Y. Design and structure analysis of multi-legged bionic soft robot. In Proceedings of the 2020 International Conference on Advanced Mechatronic Systems (ICAMechS), Hanoi, Vietnam, 10–13 December 2020; IEEE: New York, NY, USA, 2020; pp. 180–185. [Google Scholar]
- Yang, S.H.; Pyo, H.J.; Jung, D.H.; Kim, W.H. A Study on Optimal Design Process of Dual Rotor Axial-Flux Permanent Magnet Synchronous Motors. Machines 2023, 11, 445. [Google Scholar] [CrossRef]
- Chen, C.; Wu, X.; Yuan, X.; Zheng, X. A new technique for the subdomain method in predicting electromagnetic performance of surface-mounted permanent magnet motors with shaped magnets and a quasi-regular polygon rotor core. IEEE Trans. Energy Convers. 2022, 38, 1396–1409. [Google Scholar] [CrossRef]
- Tarczewski, T.; Szczepanski, R.; Erwinski, K.; Hu, X.; Grzesiak, L.M. A novel sensitivity analysis to moment of inertia and load variations for PMSM drives. IEEE Trans. Power Electron. 2022, 37, 13299–13309. [Google Scholar] [CrossRef]
- Zhang, G.; Tong, Q.; Zhang, T.; Tao, J.; Qiu, A. Design of a high torque density robot joint and analysis of force control method applied for a light exoskeleton. Electronics 2023, 12, 397. [Google Scholar] [CrossRef]
- Yu, S.; Huang, T.H.; Wang, D.; Lynn, B.; Sayd, D.; Silivanov, V.; Park, Y.S.; Tian, Y.; Su, H. Design and control of a high-torque and highly backdrivable hybrid soft exoskeleton for knee injury prevention during squatting. IEEE Robot. Autom. Lett. 2019, 4, 4579–4586. [Google Scholar] [CrossRef]
- Lv, G.; Gregg, R.D. Underactuated potential energy shaping with contact constraints: Application to a powered knee-ankle orthosis. IEEE Trans. Control. Syst. Technol. 2017, 26, 181–193. [Google Scholar] [CrossRef]
- Waldhof, M.; Parspour, N. Torque ripple minimization in exoskeleton drives with multiphase electrical machines by current harmonic injection. In Proceedings of the 2020 International Conference on Electrical Machines (ICEM), Gothenburg, Sweden, 23–26 August 2020; IEEE: New York, NY, USA, 2020; Volume 1, pp. 2152–2158. [Google Scholar]
- Sadeghierad, M.; Lesani, H.; Monsef, H.; Darabi, A. Design considerations of high speed axial flux permanent magnet generator with coreless stator. In Proceedings of the 2007 International Power Engineering Conference (IPEC 2007), Singapore, 3–6 December 2007; IEEE: New York, NY, USA, 2007; pp. 1097–1102. [Google Scholar]
- Hosseini, S.M.; Agha-Mirsalim, M.; Mirzaei, M. Design, prototyping, and analysis of a low cost axial-flux coreless permanent-magnet generator. IEEE Trans. Magn. 2007, 44, 75–80. [Google Scholar] [CrossRef]
- Chen, C.; Wang, Y.; Wei, J.; Wen, X. Research on method for reducing eddy current loss of magnet in high-speed permanent magnet synchronous motor. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; IEEE: New York, NY, USA, 2019; pp. 1–4. [Google Scholar]
- Chen, H.; Yu, F.; Yan, W.; Orabi, M. Calculation and analysis of eddy-current loss in switched reluctance motor. IEEE Trans. Appl. Supercond. 2021, 31, 1–4. [Google Scholar] [CrossRef]
- Kang, J.b.; Lee, J.H.; Kim, H.J.; Lee, J.Y. Multi-physics Analysis and Optimal Design of an Outer Rotor Surface Mounted Permanent Magnet Synchronous Motor for Coaxial Drone. In Proceedings of the 2024 IEEE 21st Biennial Conference on Electromagnetic Field Computation (CEFC), Jeju, Republic of Korea, 2–5 June 2024; IEEE: New York, NY, USA, 2024; pp. 1–2. [Google Scholar]
- Zhang, W.; Wu, Z.; Jin, L.; Fan, Y.; Hua, W.; Cheng, M. Analysis and multi-objective optimization of the hybrid excitation switched flux machine. In Proceedings of the 2023 IEEE 6th International Electrical and Energy Conference (CIEEC), Hefei, China, 12–14 May 2023. [Google Scholar]
- Tong, W.; Hou, M.; Sun, L.; Wu, S. Analysis and experimental verification of segmented rotor structure on rotor eddy current loss of high-speed surface-mounted permanent magnet machine. In Proceedings of the 2021 IEEE International Magnetic Conference (INTERMAG), Lyon, France, 26–30 April 2021; IEEE: New York, NY, USA, 2021; pp. 1–5. [Google Scholar]
- Tong, W.; Sun, R.; Wu, S. No-load iron loss of a surface-mounted permanent magnet synchronous motor utilizing an amorphous metal stator core. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; IEEE: New York, NY, USA, 2019; pp. 1–5. [Google Scholar]
- Liu, W.; Dai, Y.; Zhao, J.; Wang, X. Thermal analysis and cooling structure design of axial flux permanent magnet synchronous motor for electrical vehicle. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; IEEE: New York, NY, USA, 2019; pp. 1–6. [Google Scholar]
- Luu, P.T.; Lee, J.Y.; Lee, J.H.; Park, J.W. Electromagnetic and thermal analysis of a permanent magnet motor considering the effect of articulated robot link. Energies 2020, 13, 3239. [Google Scholar] [CrossRef]
- Wang, S.; Li, Y.; Li, Y.Z.; Wang, J.; Xiao, X.; Guo, W. Transient cooling effect analyses for a permanent-magnet synchronous motor with phase-change-material packaging. Appl. Therm. Eng. 2016, 109, 251–260. [Google Scholar] [CrossRef]
- Zhang, H.; Qiu, S.; Wang, J.; Chen, J.; Sun, X.; Zhang, C. The Study of Phase Change Thermal Management Schemes for Motors Under Frequent Overloads. In Proceedings of the 2024 IEEE International Conference on Electrical Energy Conversion Systems and Control (IEECSC), Shanghai, China, 8–10 November 2024; IEEE: New York, NY, USA, 2024; pp. 6–10. [Google Scholar]
- Yuan, T.; Zhang, C.; Yi, F.; Lv, P.; Zhang, M.; Li, S. RBFNN-Based Adaptive Integral Sliding Mode Feedback and Feedforward Control for a Lower Limb Exoskeleton Robot. Electronics 2024, 13, 1043. [Google Scholar] [CrossRef]
- Wan, H.; Chen, S.; Zhang, C.; Chen, C.Y.; Yang, G. Compliant control of flexible joint by dual-disturbance observer and predictive feedforward. IEEE/ASME Trans. Mechatron. 2023, 28, 1890–1899. [Google Scholar] [CrossRef]
- Gambon, T.M.; Schmiedeler, J.P.; Wensing, P.M. User intent identification in a lower-extremity exoskeleton via the mahalanobis distance. In Proceedings of the 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 29 November–1 December 2020; IEEE: New York, NY, USA, 2020; pp. 1115–1121. [Google Scholar]
- Villa-Parra, A.C.; Delisle-Rodriguez, D.; Botelho, T.; Mayor, J.J.V.; Delis, A.L.; Carelli, R.; Frizera Neto, A.; Bastos, T.F. Control of a robotic knee exoskeleton for assistance and rehabilitation based on motion intention from sEMG. Res. Biomed. Eng. 2018, 34, 198–210. [Google Scholar] [CrossRef]
- Coser, O.; Tamantini, C.; Soda, P.; Zollo, L. AI-based methodologies for exoskeleton-assisted rehabilitation of the lower limb: A review. Front. Robot. AI 2024, 11, 1341580. [Google Scholar] [CrossRef]
- Sedighi, P.; Li, X.; Tavakoli, M. Emg-based intention detection using deep learning for shared control in upper-limb assistive exoskeletons. IEEE Robot. Autom. Lett. 2023, 9, 41–48. [Google Scholar] [CrossRef]
- Schmitthenner, D.; Martin, A.E. Performance of position, force, and impedance controllers for a pneumatic cylinder ankle exoskeleton. J. Dyn. Syst. Meas. Control. 2023, 145. [Google Scholar] [CrossRef]
- Aguirre-Ollinger, G.; Colgate, J.E.; Peshkin, M.A.; Goswami, A. Active-impedance control of a lower-limb assistive exoskeleton. In Proceedings of the 2007 IEEE 10th international conference on rehabilitation robotics, Noordwijk, The Netherlands, 13–15 June 2007; IEEE: New York, NY, USA, 2007; pp. 188–195. [Google Scholar]
- Wang, Y.; Guo, Y.; Tao, Y.; Tian, Y.; Wang, H. Human-centered active torque-based AAN impedance control for lower limb patient-exoskeleton coupling system in the rehabilitation. Int. J. Robust Nonlinear Control. 2023, 35, 4096–4131. [Google Scholar] [CrossRef]
- Huo, W.; Moon, H.; Alouane, M.A.; Bonnet, V.; Huang, J.; Amirat, Y.; Vaidyanathan, R.; Mohammed, S. Impedance modulation control of a lower-limb exoskeleton to assist sit-to-stand movements. IEEE Trans. Robot. 2021, 38, 1230–1249. [Google Scholar] [CrossRef]
- Chen, L.; Wang, C.; Song, X.; Wang, J.; Zhang, T.; Li, X. Dynamic trajectory adjustment of lower limb exoskeleton in swing phase based on impedance control strategy. Proc. Inst. Mech. Eng. Part J. Syst. Control. Eng. 2020, 234, 1120–1132. [Google Scholar] [CrossRef]
- Laubscher, C.A.; Goo, A.; Farris, R.J.; Sawicki, J.T. Hybrid impedance-sliding mode switching control of the indego explorer lower-limb exoskeleton in able-bodied walking. J. Intell. Robot. Syst. 2022, 104, 76. [Google Scholar] [CrossRef]
- Courtois, G.; Chevrie, J.; Dequidt, A.; Bonnet, X.; Pudlo, P. Design of a Rehabilitation Exoskeleton with Impedance Control: First Experiments. In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics, Paris, France, 6–8 July 2021; SCITEPRESS-Science and Technology Publications: Setúbal, Portugal, 2021; pp. 469–476. [Google Scholar]
- Wu, Q.; Xu, D.; Chen, B.; Wu, H. Integral fuzzy sliding mode impedance control of an upper extremity rehabilitation robot using time delay estimation. IEEE Access 2019, 7, 156513–156525. [Google Scholar] [CrossRef]
- Zhou, J.; Li, Z.; Li, X.; Wang, X.; Song, R. Human–robot cooperation control based on trajectory deformation algorithm for a lower limb rehabilitation robot. IEEE/ASME Trans. Mechatron. 2021, 26, 3128–3138. [Google Scholar] [CrossRef]
- Aguirre-Ollinger, G.; Nagarajan, U.; Goswami, A. An admittance shaping controller for exoskeleton assistance of the lower extremities. Auton. Robot. 2016, 40, 701–728. [Google Scholar] [CrossRef]
- Gui, K.; Liu, H.; Zhang, D. A generalized framework to achieve coordinated admittance control for multi-joint lower limb robotic exoskeleton. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; IEEE: New York, NY, USA, 2017; pp. 228–233. [Google Scholar]
- Zhang, T.; Tran, M.; Huang, H. Admittance shaping-based assistive control of SEA-driven robotic hip exoskeleton. IEEE/ASME Trans. Mechatron. 2019, 24, 1508–1519. [Google Scholar] [CrossRef]
- Xie, C.; Yang, Q.; Huang, Y.; Su, S.W.; Xu, T.; Song, R. A hybrid arm-hand rehabilitation robot with EMG-based admittance controller. IEEE Trans. Biomed. Circuits Syst. 2021, 15, 1332–1342. [Google Scholar] [CrossRef]
- He, B.; Zhou, X.; Huai, Y.; Liu, J.; Li, P.; Wang, C.; Wu, X. Admittance Control based Hemiplegic Exoskeleton Motion Control. In Proceedings of the 2022 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Guiyang, China, 17–22 July 2022; IEEE: New York, NY, USA, 2022; pp. 331–336. [Google Scholar]
- Itadera, S.; Nakanishi, J.; Hasegawa, Y.; Fukuda, T.; Tanimoto, M.; Kondo, I. Admittance control based robotic clinical gait training with physiological cost evaluation. Robot. Auton. Syst. 2020, 123, 103326. [Google Scholar] [CrossRef]
- Tu, Y.; Zhu, A.; Song, J.; Shen, H.; Shen, Z.; Zhang, X.; Cao, G. An adaptive sliding mode variable admittance control method for lower limb rehabilitation exoskeleton robot. Appl. Sci. 2020, 10, 2536. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, R.; Miao, Y.; Wang, S.; Zhang, Y. PI2-Based Adaptive Impedance Control for Gait Adaption of Lower Limb Exoskeleton. IEEE/ASME Trans. Mechatron. 2024, 29, 4251–4261. [Google Scholar] [CrossRef]
- Ortlieb, A.; Lichard, P.; Dzeladini, F.; Baud, R.; Bleuler, H.; Ijspeert, A.; Bouri, M. Investigation on variable impedance control for modulating assistance in walking strategies with the autonomyo exoskeleton. In Proceedings of the International Symposium on Wearable Robotics, Pisa, Italy, 16–20 October 2018; Springer: Cham, Switzerland, 2018; pp. 75–79. [Google Scholar]
- Liu, L.; Leonhardt, S.; Ngo, C.; Misgeld, B.J. Impedance-controlled variable stiffness actuator for lower limb robot applications. IEEE Trans. Autom. Sci. Eng. 2019, 17, 991–1004. [Google Scholar] [CrossRef]
- Narayan, J.; Abbas, M.; Dwivedy, S.K. Adaptive backstepping sliding mode subject-cooperative control for a pediatric lower-limb exoskeleton robot. Trans. Inst. Meas. Control. 2025, 47, 352–368. [Google Scholar] [CrossRef]
- Taherifar, A.; Vossoughi, G.; Ghafari, A.S. Variable admittance control of the exoskeleton for gait rehabilitation based on a novel strength metric. Robotica 2018, 36, 427–447. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, H.; Tian, Y.; Xu, J. Position/force evaluation-based assist-as-needed control strategy design for upper limb rehabilitation exoskeleton. Neural Comput. Appl. 2022, 34, 13075–13090. [Google Scholar] [CrossRef]
- Guo, Y.; Tian, Y.; Wang, H.; Han, S. Adaptive hybrid-mode assist-as-needed control of upper limb exoskeleton for rehabilitation training. Mechatronics 2024, 100, 103188. [Google Scholar] [CrossRef]
- Cao, Y.; Chen, X.; Zhang, M.; Huang, J. Adaptive position constrained assist-as-needed control for rehabilitation robots. IEEE Trans. Ind. Electron. 2023, 71, 4059–4068. [Google Scholar] [CrossRef]
- Wei, D.; Li, Z.; Wei, Q.; Su, H.; Song, B.; He, W.; Li, J. Human-in-the-loop control strategy of unilateral exoskeleton robots for gait rehabilitation. IEEE Trans. Cogn. Dev. Syst. 2019, 13, 57–66. [Google Scholar] [CrossRef]
- Fujiki, T.; Tahara, K. Series admittance–impedance controller for more robust and stable extension of force control. ROBOMECH J. 2022, 9, 23. [Google Scholar] [CrossRef]
- Kou, J.; Wang, Y.; Shi, Y.; Xu, S.; Zhan, H.; Guo, Q. Active control strategy of lower limb exoskeleton based on variable admittance control. Robot. Auton. Syst. 2025, 186, 104906. [Google Scholar] [CrossRef]
- Chandrapal, M.; Chen, X.; Wang, W.; Stanke, B.; Pape, N.L. Preliminary evaluation of intelligent intention estimation algorithms for an actuated lower-limb exoskeleton. Int. J. Adv. Robot. Syst. 2013, 10, 147. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, G.; Li, L.; Diao, D. AEKF-based trajectory-error compensation of knee exoskeleton for human–exoskeleton interaction control. Robot. Intell. Autom. 2024, 44, 84–95. [Google Scholar] [CrossRef]
- Gambon, T.M.; Schmiedeler, J.P.; Wensing, P.M. Effects of user intent changes on onboard sensor measurements during exoskeleton-assisted walking. IEEE Access 2020, 8, 224071–224082. [Google Scholar] [CrossRef]
- Higgins, T.M. Characterization, Estimation, and Realization of Human Intent for Exoskeleton-Assisted Walking; University of Notre Dame: Notre Dame, IN, USA, 2022. [Google Scholar]
- Cremer, S.; Das, S.K.; Wijayasinghe, I.B.; Popa, D.O.; Lewis, F.L. Model-free online neuroadaptive controller with intent estimation for physical human–robot interaction. IEEE Trans. Robot. 2019, 36, 240–253. [Google Scholar] [CrossRef]
- Yu, X.; Li, Y.; Zhang, S.; Xue, C.; Wang, Y. Estimation of human impedance and motion intention for constrained human–robot interaction. Neurocomputing 2020, 390, 268–279. [Google Scholar] [CrossRef]
- Dou, S.; Xiao, J.; Zhao, W.; Yuan, H.; Liu, H. A robot skill learning framework based on compliant movement primitives. J. Intell. Robot. Syst. 2022, 104, 53. [Google Scholar] [CrossRef]
- Calinon, S.; Kormushev, P.; Caldwell, D.G. Compliant skills acquisition and multi-optima policy search with EM-based reinforcement learning. Robot. Auton. Syst. 2013, 61, 369–379. [Google Scholar] [CrossRef]
- Liu, L.; Illian, M.; Leonhardt, S.; Misgeld, B.J. Iterative learning control for cascaded impedance-controlled compliant exoskeleton with adaptive reaction to spasticity. IEEE Trans. Instrum. Meas. 2023, 72, 4008211. [Google Scholar] [CrossRef]
- Molazadeh, V.; Zhang, Q.; Bao, X.; Sharma, N. An iterative learning controller for a switched cooperative allocation strategy during sit-to-stand tasks with a hybrid exoskeleton. IEEE Trans. Control. Syst. Technol. 2021, 30, 1021–1036. [Google Scholar] [CrossRef]
- Rose, L.; Bazzocchi, M.C.; Nejat, G. A model-free deep reinforcement learning approach for control of exoskeleton gait patterns. Robotica 2022, 40, 2189–2214. [Google Scholar] [CrossRef]
- Johannsmeier, L.; Gerchow, M.; Haddadin, S. A framework for robot manipulation: Skill formalism, meta learning and adaptive control. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: New York, NY, USA, 2019; pp. 5844–5850. [Google Scholar]
- Si, W.; Guan, Y.; Wang, N. Adaptive compliant skill learning for contact-rich manipulation with human in the loop. IEEE Robot. Autom. Lett. 2022, 7, 5834–5841. [Google Scholar] [CrossRef]
- Sharifi, M.; Azimi, V.; Mushahwar, V.K.; Tavakoli, M. Impedance learning-based adaptive control for human–robot interaction. IEEE Trans. Control. Syst. Technol. 2021, 30, 1345–1358. [Google Scholar] [CrossRef]
- Luo, S.; Androwis, G.; Adamovich, S.; Su, H.; Nunez, E.; Zhou, X. Reinforcement learning and control of a lower extremity exoskeleton for squat assistance. Front. Robot. AI 2021, 8, 702845. [Google Scholar] [CrossRef]
- Laschowski, B.; McPhee, J. Energy-efficient actuator design principles for robotic leg prostheses and exoskeletons: A review of series elasticity and backdrivability. J. Comput. Nonlinear Dyn. 2023, 18, 060801. [Google Scholar] [CrossRef]
- Voloshina, A.S.; Collins, S.H. Lower limb active prosthetic systems—overview. Wearable Robot. 2020, 469–486. [Google Scholar] [CrossRef]
- Mutluer, M.; Bilgin, O. Design optimization of PMSM by particle swarm optimization and genetic algorithm. In Proceedings of the 2012 International Symposium on Innovations in Intelligent Systems and Applications, Trabzon, Turkey, 2–4 July 2012; IEEE: New York, NY, USA, 2012; pp. 1–4. [Google Scholar]
- Yu, Y.; Pan, Y.; Chen, Q.; Hu, Y.; Gao, J.; Zhao, Z.; Niu, S.; Zhou, S. Multi-objective optimization strategy for permanent magnet synchronous motor based on combined surrogate model and optimization algorithm. Energies 2023, 16, 1630. [Google Scholar] [CrossRef]
- Sano, H.; Senda, T.; Kida, Y.; Suzuki, Y.; Yamada, T. Sensitivity study on configuration of large scale multi-objective optimization of a PMSM. In Proceedings of the 2022 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 9–13 October 2022; IEEE: New York, NY, USA, 2022; pp. 1–6. [Google Scholar]
- Bhagubai, P.P.; Bucho, L.F.; Fernandes, J.F.; Costa Branco, P. Optimal design of an interior permanent magnet synchronous motor with cobalt iron core. Energies 2022, 15, 2882. [Google Scholar] [CrossRef]
- Wan, H.; Chen, S.; Kong, X.; Sun, X.; Chen, C.Y.; Chen, J.; Zhang, C.; Yang, G. Compliant Control of Flexible Joint Toward Prescribed Performance With Gaussian Kernels. IEEE Trans. Syst. Man, Cybern. Syst. 2025, 55, 3769–3779. [Google Scholar] [CrossRef]
- Poggensee, K.L.; Collins, S.H. Lower limb biomechanics of fully trained exoskeleton users reveal complex mechanisms behind the reductions in energy cost with human-in-the-loop optimization. Front. Robot. AI 2024, 11, 1283080. [Google Scholar] [CrossRef]
- Cavenago, F.; Voli, L.; Massari, M. Adaptive hybrid system framework for unified impedance and admittance control. J. Intell. Robot. Syst. 2018, 91, 569–581. [Google Scholar] [CrossRef]
- Zhang, Y.P.; Cao, G.Z.; Li, L.L.; Diao, D.F. Interactive control of lower limb exoskeleton robots: A review. IEEE Sens. J. 2024, 24, 5759–5784. [Google Scholar] [CrossRef]
- Lu, C.; Qi, Q.; Liu, Y.; Li, D.; Xian, W.; Wang, Y.; Chen, C.; Xu, X. Exoskeleton Recognition of Human Movement Intent based on Surface Electromyographic Signals. IEEE Access 2024, 12, 53986–54004. [Google Scholar] [CrossRef]
- Alaoui, O.M.; Expert, F.; Morel, G.; Jarrassé, N. Using generic upper-body movement strategies in a free walking setting to detect gait initiation intention in a lower-limb exoskeleton. IEEE Trans. Med. Robot. Bionics 2020, 2, 236–247. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint | Movement Pattern | Allowable Range | Walking Range | Peak Torque (Nm/kg) |
|---|---|---|---|---|
| hip | Stretching/flexion | ∼ | ∼ | 1.2 |
| knee | Stretching/flexion | ∼ | ∼ | 0.5 |
| ankle | Stretching/flexion | ∼ | ∼ | 1.7 |
| Exoskeleton | Actuator Type | Gear Ratio | Torque Output (Nm) | Total Mass (kg) |
|---|---|---|---|---|
| HAL Series | DC Motor + Harmonic Reducer | >50:1 | − | ∼15 |
| GEMS | BLDC + Harmonic Reducer | 75:1 | 14 | 2.9 |
| USTC Rehabilitation | BLDC + Harmonic Reducer | 160:1 | 62 | − |
| UEXO Series Of UEST | DC Motor + Harmonic Reducer | 101:1 | 29.7 | 2.4 |
| Knee Assistant Exoskeleton | DC Motor + Harmonic Reducer | 100:1 | − | 3.5 |
| Elastic Actuator Type | Key Components | Target Joint | Elastic Unit Design | Weight (kg) |
|---|---|---|---|---|
| Linear Series Elastic Actuator | Brushless DC motor, ball screw, encoder, compression spring | Knee (RoboKnee) | Compression spring | 2.9 |
| Linear Series Elastic Actuator | Custom linear actuator, torsional tandem spring | Knee (Mindwalke) | Torsional tandem spring | − |
| High-Power Series Elastic Joint | Frameless brushless motor, harmonic reducer, torque spring | Torque-controlled exoskeleton | Dual-spoke torque spring | − |
| Clutched Series Elastic Joint | Planar brushless motor, harmonic gearbox, electromagnetic clutch, disc torsion spring | Hip | Disc-shaped torsion spring | 1.5 |
| Parallel Elastic Actuator | Split structure, brushless DC motor, harmonic reducer, dual parallel springs | Universal | Dual parallel springs | 2.34 |
| Coupled Variable Parallel Elastic Actuator | Brushless motor, planar coil springs (parallel) | Hip (sagittal plane) | Planar coil springs | 2.4 |
| Hybrid Modular Actuator | Series-parallel elastic units | Knee | Composite elastic units | 1.5 |
| Hybrid Elastic Joint | Series module (brushless DC motor, planetary gear, butterfly spring) + parallel module (leaf spring) | Hip | Butterfly spring (series), leaf spring (parallel) | − |
| Design Case | Key Components | Target Joint | Technical Advantages | Limitations | Weight (kg) |
|---|---|---|---|---|---|
| Quasi-Direct Drive Joint | High-torque motor, embedded planetary gear, magnetic encoder, driver, controller | Multi-joint exoskeleton | Lightweight, high torque output, integrated control | Gear meshing backlash, heat dissipation | <1.0 |
| Integrated Drive Module | Frameless motor, knee/ankle mechanical structure | Knee and ankle exoskeleton | Compact integration, power-intensive transmission | Limited torque scalability | − |
| Custom Motor Design | Frameless Custom BLDC motor with package windings, Sun-planet gear reducer | General joint applications | Enhanced torque density, shared support components | Complex manufacturing requirements | − |
| Rolling Knee Joint | Two-stage planetary gear reducer, synchronous belt, customized motor | Knee | Reduced inertia, distributed motor placement | Reduced motion accuracy | 1.15 |
| Joint Type | Torque Density | Back-Drivability | Dynamic Bandwidth | Mechanical Complexity |
|---|---|---|---|---|
| Harmonic Drive | Medium | Poor | Low | High |
| Series Elastic Actuator (SEA) | Low | Good | Moderate | High |
| Quasi-Direct Drive | High | Moderate | High | Moderate |
| Aspect | Current Challenges | Future Research Directions |
|---|---|---|
| Mechanism design | Trade-off between joint compactness, alignment with human anatomy, and structural rigidity; limited modularity and adjustability. | Design of bio-inspired, lightweight, and modular joint mechanisms with better joint alignment and structural compliance. |
| Motor design | Difficulty achieving high torque density, efficiency, and thermal stability in compact spaces; limited customization for wearable use. | Development of high-torque-density motors optimized for wearable robotics; improved cooling and winding strategies. |
| Compliant control | Sensitivity to parameter tuning (impedance/admittance); limited robustness in real-world scenarios. | Learning-based adaptive control tailored to user states and terrain conditions; safe gain auto-tuning. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Chen, S.; Li, S.; Liu, Y.; Wan, H.; Xu, Z.; Zhang, C. A Survey on Design and Control Methodologies of High- Torque-Density Joints for Compliant Lower-Limb Exoskeleton. Sensors 2025, 25, 4016. https://doi.org/10.3390/s25134016
Xu J, Chen S, Li S, Liu Y, Wan H, Xu Z, Zhang C. A Survey on Design and Control Methodologies of High- Torque-Density Joints for Compliant Lower-Limb Exoskeleton. Sensors. 2025; 25(13):4016. https://doi.org/10.3390/s25134016
Chicago/Turabian StyleXu, Jingbo, Silu Chen, Shupei Li, Yong Liu, Hongyu Wan, Zhuang Xu, and Chi Zhang. 2025. "A Survey on Design and Control Methodologies of High- Torque-Density Joints for Compliant Lower-Limb Exoskeleton" Sensors 25, no. 13: 4016. https://doi.org/10.3390/s25134016
APA StyleXu, J., Chen, S., Li, S., Liu, Y., Wan, H., Xu, Z., & Zhang, C. (2025). A Survey on Design and Control Methodologies of High- Torque-Density Joints for Compliant Lower-Limb Exoskeleton. Sensors, 25(13), 4016. https://doi.org/10.3390/s25134016