
Development of a Two-Finger Haptic Robotic Hand with Novel Stiffness Detection and Impedance Control

 ,
, 
 , and
, and 
Abstract
1. Introduction
2. Background and Approach
- The robotic hand is equipped with force sensors to gather information about contacts with manipulated objects. No other feedback source, such as visual information, is utilized.
- A two-fingered design, with each finger having two joints, is employed for manipulation. This design mirrors a human grasp using the thumb and index fingers, with fingertip movements confined to a plane. Despite this limitation, the design offers a wide range of motion and dexterity, comparable to the human hand’s ability to grasp objects from various orientations and positions.
- Manipulated objects are chosen with varying stiffness and shapes, demonstrating the design’s ability to handle a diverse range of objects, including delicate and rigid ones.
- Aluminum and polylactic acid (PLA) were chosen as the primary materials for manufacturing fingers and related parts to ensure that the hand is lightweight, facilitating swift movements and preventing excessive strain on the robot’s actuators.
- Electronic servomotors are selected as actuators, meeting several design requirements. These motors are equipped with encoders to provide accurate angular position feedback for precise finger positioning. This servo-based gripper enables a fine level of force and speed control, accommodating diverse tasks with variable parameters. Moreover, the use of servo-based grippers contributes to efficient power usage, a crucial factor in extended operation and increased autonomy.
3. Design of the Robotic Hand
3.1. Prototype Design
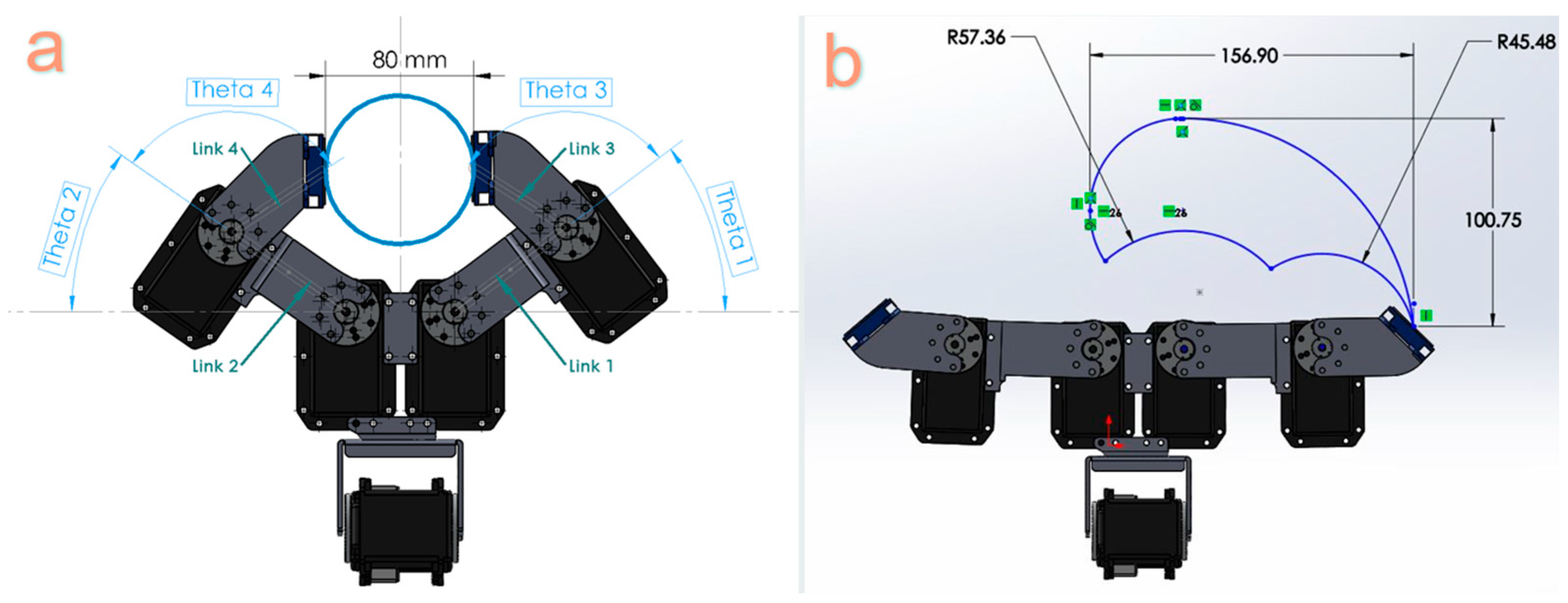
3.2. Object and Hand Geometrical Configurations
3.3. Joint Controlling Using Inverse Kinematic Equations
3.4. Controller Design
- Position Control: This control algorithm involves controlling the position of the robotic joints to achieve the desired configuration of the end-effectors [23].
- Force Control: This control algorithm involves controlling the forces at the robotic hand’s end effector and is useful for tasks requiring gentle interaction with the environment or objects [24].
- Impedance Control: This control algorithm regulates the mechanical impedance of the end effectors, which involves managing the responses of end effectors to the applied forces and motions. This technique adjusts the resistance of the system to external forces during interactions with objects or the environment [25,26].
- Approach: The robot starts with a relatively low stiffness and approaches the object. Lower stiffness allows for compliant interaction during the initial contact.
- Contact: As the robot contacts the object, it may gradually increase its stiffness to ensure stability during the grasp. This prevents the excessive deformation of the object.
- Holding: Once the object is securely grasped, the robot can maintain a stable grip by adjusting the stiffness and damping. The control system may continuously adapt to the object’s properties and environmental conditions.
- Lifting: If the task involves lifting the object, the robot can adjust the stiffness and damping to ensure a smooth and controlled lift, minimizing the risk of dropping the object.
4. Experimental Implementation
5. Results
6. Summary and Conclusions
- The use of servomotors in the design of the hand or gripper increased accuracy and ease of operation, enabling the implementation of control algorithms.
- Two degrees of freedom in each finger enhanced the robot’s dexterity.
- Using precise servomotors allowed for the application of direct and inverse kinematics to control the robot’s position as a controller or observer.
- Impedance control allowed for an acceptable understanding of touching different objects and control of the hand, providing simplicity and high precision.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bicchi, A. Hands for dexterous manipulation and robust grasping: A difficult road toward simplicity. IEEE Trans. Robot. Automat. 2000, 16, 652–662. [Google Scholar] [CrossRef]
- Edsinger, A.; Kemp, C. Manipulation in Human Environments. In Proceedings of the 2006 6th IEEE-RAS International Conference on Humanoid Robots, University of Genova, Genova, Italy, 4–6 December 2006; IEEE: Genova, Italy, 2006; pp. 102–109. [Google Scholar] [CrossRef]
- Saxena, A.; Driemeyer, J.; Ng, A.Y. Robotic Grasping of Novel Objects using Vision. Int. J. Robot. Res. 2008, 27, 157–173. [Google Scholar] [CrossRef]
- Hamed, A.; Tang, S.C.; Ren, H.; Squires, A.; Payne, C.; Masamune, K.; Tang, G.; Mohammadpour, J.; Tse, Z.T.H. Advances in Haptics, Tactile Sensing, and Manipulation for Robot-Assisted Minimally Invasive Surgery, Noninvasive Surgery, and Diagnosis. J. Robot. 2012, 2012, 412816. [Google Scholar] [CrossRef]
- Okamura, A.M.; Verner, L.N.; Reiley, C.E.; Mahvash, M. Haptics for Robot-Assisted Minimally Invasive Surgery. In Robotics Research; Kaneko, M., Nakamura, Y., Eds.; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2010; Volume 66, pp. 361–372. ISBN 978-3-642-14742-5. [Google Scholar] [CrossRef]
- Radi, M.; Reinhart, G. Industrial Haptic Robot Guidance System for assembly processes. In Proceedings of the 2009 IEEE International Workshop on Haptic Audio Visual Environments and Games, Lecco, Italy, 7–8 November 2009; IEEE: Lecco, Italy, 2009; pp. 69–74. [Google Scholar] [CrossRef]
- Gil Fuster, A.M. Gripper Design and Development for a Modular Robot. Bachelor’s Thesis, Universitat Politècnica de Catalunya, Barcelona, Spain, 2015. [Google Scholar]
- Causey, G. Guidelines for the design of robotic gripping systems. Assem. Autom. 2003, 23, 18–28. [Google Scholar] [CrossRef]
- Rahul, R.; Jose, J.; Harish, M.T.; Bhavani, R.R. Design of a novel Three-Finger haptic grasping system: Extending a Single point to Tripod grasp. In Proceedings of the 2017 3rd International Conference on Advances in Robotics, New Delhi, India, 28 June–2 July 2017; ACM: New Delhi, India, 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Shimoga, K.B. Robot Grasp Synthesis Algorithms: A Survey. Int. J. Robot. Res. 1996, 15, 230–266. [Google Scholar] [CrossRef]
- Xu, Z.; Todorov, E. Design of a highly biomimetic anthropomorphic robotic hand towards artificial limb regeneration. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; IEEE: Stockholm, Sweden, 2016; pp. 3485–3492. [Google Scholar] [CrossRef]
- Cutkosky, M.R. On grasp choice, grasp models, and the design of hands for manufacturing tasks. IEEE Trans. Robot. Automat. 1989, 5, 269–279. [Google Scholar] [CrossRef]
- Martin, T.B.; Ambrose, R.O.; Diftler, M.A.; Platt, R.; Butzer, M.J. Tactile gloves for autonomous grasping with the NASA/DARPA Robonaut. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA ’04, New Orleans, LA, USA, 26 April–1 May 2004; IEEE: New Orleans, LA, USA, 2004; Volume 2, pp. 1713–1718. [Google Scholar] [CrossRef]
- King, C.-H.; Culjat, M.O.; Franco, M.L.; Lewis, C.E.; Dutson, E.P.; Grundfest, W.S.; Bisley, J.W. Tactile Feedback Induces Reduced Grasping Force in Robot-Assisted Surgery. IEEE Trans. Haptics 2009, 2, 103–110. [Google Scholar] [CrossRef] [PubMed]
- Dollar, A.M.; Howe, R.D. Joint Coupling Design of Underactuated Grippers. In Proceedings of the Volume 2: 30th Annual Mechanisms and Robotics Conference, Parts A and B, Philadelphia, PA, USA, 10–13 September 2006; ASMEDC: Philadelphia, PA, USA, 2006; pp. 903–911. [Google Scholar] [CrossRef]
- Dollar, A.M.; Howe, R.D. Towards grasping in unstructured environments: Grasper compliance and configuration optimization. Adv. Robot. 2005, 19, 523–543. [Google Scholar] [CrossRef][Green Version]
- Romano, J.M.; Hsiao, K.; Niemeyer, G.; Chitta, S.; Kuchenbecker, K.J. Human-Inspired Robotic Grasp Control with Tactile Sensing. IEEE Trans. Robot. 2011, 27, 1067–1079. [Google Scholar] [CrossRef]
- Bicchi, A.; Ing, D.; Fantoni, G.; Tincani, V. Development of an Underactuated Gripper with in Hand Manipulation Capability. Ph.D. Dissertation, University of Pisa, Pisa, Italy, 2012–2013. [Google Scholar]
- Montaño, A.; Suárez, R. Manipulation of Unknown Objects to Improve the Grasp Quality Using Tactile Information. Sensors 2018, 18, 1412. [Google Scholar] [CrossRef] [PubMed]
- Shaw, J.-S.; Dubey, V. Design of servo actuated robotic gripper using force control for range of objects. In Proceedings of the 2016 International Conference on Advanced Robotics and Intelligent Systems (ARIS), Taipei, Taiwan, 31 August–2 September 2016; IEEE: Taipei, Taiwan, 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Al-Mohammed, M.; Ding, Z.; Liu, P.; Behal, A. An Adaptive Control Based Approach for Gripping Novel Objects with Minimal Grasping Force. In Proceedings of the 2018 IEEE 14th International Conference on Control and Automation (ICCA), Anchorage, AK, USA, 12–15 June 2018; IEEE: Anchorage, AK, USA, 2018; pp. 1040–1045. [Google Scholar] [CrossRef]
- Hosseini, M.; Mohammadi, V.; Jafari, F.; Bamdad, E. RoboCup 2016 Best Humanoid Award Winner Team Baset Adult-Size. In RoboCup 2016: Robot World Cup XX; Behnke, S., Sheh, R., Sarıel, S., Lee, D.D., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2017; Volume 9776, pp. 467–477. ISBN 978-3-319-68791-9. [Google Scholar] [CrossRef]
- Myint, K.M.; Htun, Z.M.M. Position Control Method for Pick And Place Robot Arm For Object Sorting System. Int. J. Sci. Technol. Res. 2016, 5, 57–61. [Google Scholar]
- Zeng, G.; Hemami, A. An overview of robot force control. Robotica 1997, 15, 473–482. [Google Scholar] [CrossRef]
- Hogan, N. Impedance Control: An Approach to Manipulation. In Proceedings of the 1984 American Control Conference, San Diego, CA, USA, 6–8 June 1984; IEEE: San Diego, CA, USA, 1984; pp. 304–313. [Google Scholar] [CrossRef]
- Chu, Z.; Ma, Y.; Zhou, M.; Sun, F. Experiment on Self-adaptive Impedance Control of Two-Finger Gripper with Tactile Sensing. In Cognitive Systems and Signal Processing; Sun, F., Liu, H., Hu, D., Eds.; Communications in Computer and Information Science; Springer: Singapore, 2017; Volume 710, pp. 261–275. ISBN 978-981-10-5229-3. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Links | Length (mm) | Joints | Joint Constraints (Degree) |
|---|---|---|---|
| Link 1 | 67 mm | Servo 1 | 0 < θ1 < 90 |
| Link 2 | 67 mm | Servo 2 | 90 < θ2 < 180 |
| Link 3 | 40.3 mm | Servo 3 | 0 < θ3 < 110 |
| Link 4 | 40.3 mm | Servo 4 | 70 < θ4 < 180 |
| Objects | Effective Diameter (mm) | Fingertip-to-Fingertip Distance (mm) | Rigidity Percentage (%) |
|---|---|---|---|
| Sponge Ball | 65 | 58 | 89 |
| Empty Soda Can | 50 | 47 | 94 |
| Apple | 60 | 60 | 100 |
| Glass Cup | 52 | 52 | 100 |
| Plastic Cup | 60 | 59 | 98 |
| Milk Packet | 42 | 40 | 95 |
| Degrees of Stiffness | Values from FSR Sensors |
|---|---|
| Very Soft | 0–200 |
| Soft | 201–400 |
| Moderate | 401–550 |
| Stiff | 551–700 |
| Very Stiff | 701–800 |
| Degrees of Stiffness | Current Differences in Close and Load Phases (mA) |
|---|---|
| Very Soft | 80–289 |
| Soft | 290–339 |
| Moderate | 340–379 |
| Stiff | 380–429 |
| Very Stiff | ≥430 |
| Objects | Very Soft | Soft | Moderate | Stiff | Very Stiff |
|---|---|---|---|---|---|
| Sponge Ball | 10 | 0 | 0 | 0 | 0 |
| Empty Soda Can | 9 | 1 | 0 | 0 | 0 |
| Plastic Cup | 1 | 8 | 1 | 0 | 0 |
| Milk Packet | 1 | 7 | 2 | 0 | 0 |
| Apple | 0 | 0 | 3 | 7 | 0 |
| Glass Cup | 0 | 0 | 0 | 0 | 10 |
| Experimental Results | Sponge Ball | Empty Soda Can | Plastic Cup | Milk Packet | Apple | Glass Cup |
|---|---|---|---|---|---|---|
| Average servomotor current values during initial touch (end of close phase) | 157.7 mA | 142.7 mA | 167.4 mA | 155 mA | 167.2 mA | 163.5 mA |
| Average servomotor current values during loading (end of load phase) | 319.2 mA | 445 mA | 469.9 mA | 472 mA | 571.5 mA | 600.2 mA |
| The current difference at the close and load phases | 161.5 mA | 282.2 mA | 302.5 mA | 317 mA | 404.2 mA | 436.7 mA |
| Degrees of stiffness | Very Soft | Very Soft | Soft | Soft | Stiff | Very Stiff |
| The position of left and right fingertips during touch (x,y) | (166, 40) and (166, −40) | (166, 40) and (166, −40) | (166, 35) and (166, −35) | (170, 19) and (170, −19) | (166, 34) and (166, −34) | (166, 34) and (166, −34) |
| The position of left and right fingertips during gripping (x,y) | (175, 25) and (175, −25) | (171, 29) and (171, −29) | 168, 32) and (168, −32) | (175, 14) and (175, −14) | (169, 31) and (169, −31) | (167, 33) and (167, −33) |
| The position of left and right fingertips during destructive deformation (x,y) | NA | (176, 24) and (176, −24) | (170, 31) and (176, −31) | (180, 9) and (180, −9) | NA | NA |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammadi, V.; Shahbad, R.; Hosseini, M.; Gholampour, M.H.; Shiry Ghidary, S.; Najafi, F.; Behboodi, A. Development of a Two-Finger Haptic Robotic Hand with Novel Stiffness Detection and Impedance Control. Sensors 2024, 24, 2585. https://doi.org/10.3390/s24082585
Mohammadi V, Shahbad R, Hosseini M, Gholampour MH, Shiry Ghidary S, Najafi F, Behboodi A. Development of a Two-Finger Haptic Robotic Hand with Novel Stiffness Detection and Impedance Control. Sensors. 2024; 24(8):2585. https://doi.org/10.3390/s24082585
Chicago/Turabian StyleMohammadi, Vahid, Ramin Shahbad, Mojtaba Hosseini, Mohammad Hossein Gholampour, Saeed Shiry Ghidary, Farshid Najafi, and Ahad Behboodi. 2024. "Development of a Two-Finger Haptic Robotic Hand with Novel Stiffness Detection and Impedance Control" Sensors 24, no. 8: 2585. https://doi.org/10.3390/s24082585
APA StyleMohammadi, V., Shahbad, R., Hosseini, M., Gholampour, M. H., Shiry Ghidary, S., Najafi, F., & Behboodi, A. (2024). Development of a Two-Finger Haptic Robotic Hand with Novel Stiffness Detection and Impedance Control. Sensors, 24(8), 2585. https://doi.org/10.3390/s24082585