
Unmanned Surface Vehicle Thruster Fault Diagnosis via Vibration Signal Wavelet Transform and Vision Transformer under Varying Rotational Speed Conditions

 , , and
, , and 
Abstract
1. Introduction
2. Related Works and Backgrounds
2.1. Related Works
2.1.1. Fault-Related Research on Unmanned Marine Platforms
2.1.2. Underwater Thruster Stand-Alone Fault Detection and Diagnosis Research
2.2. Backgrounds
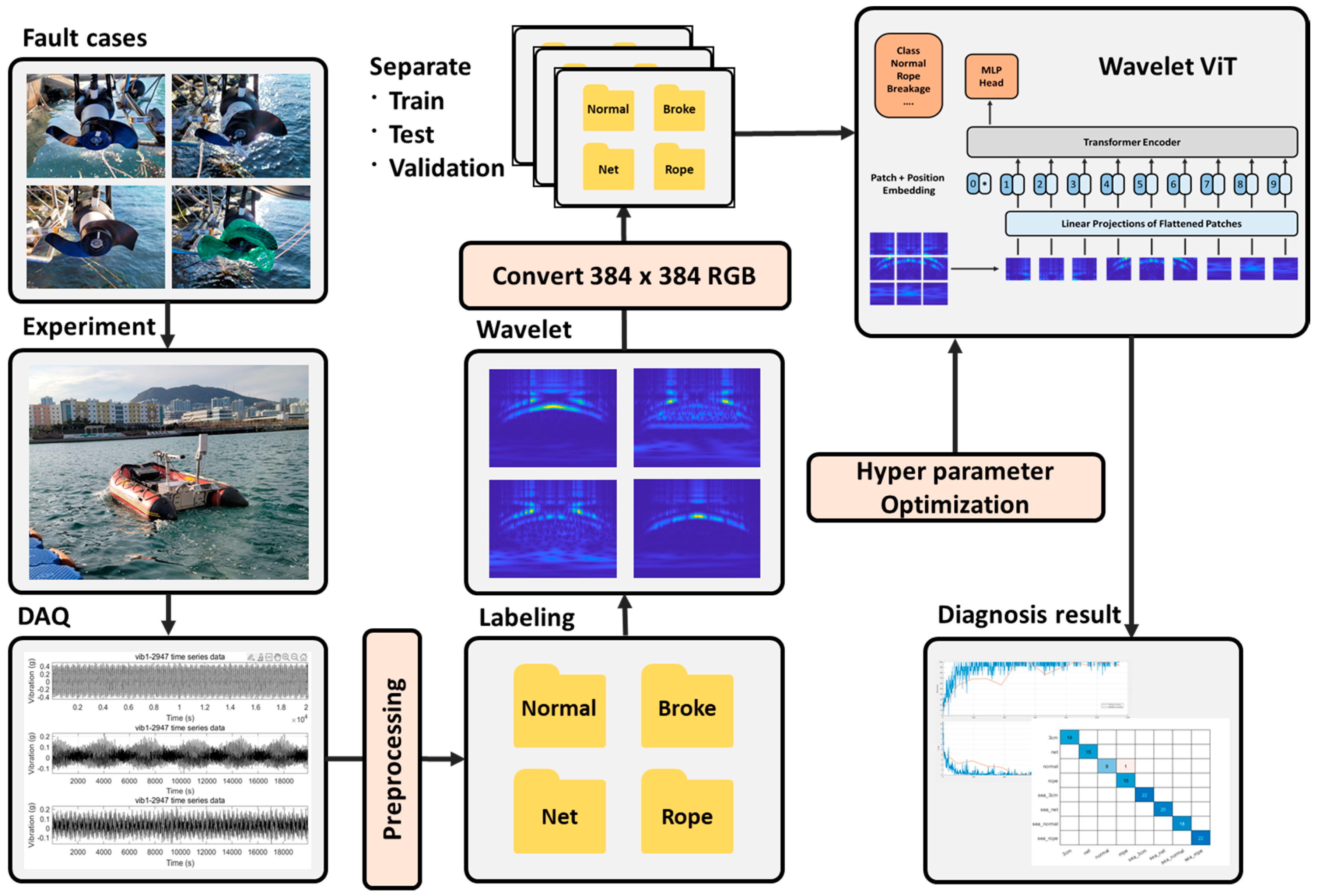
3. Methods
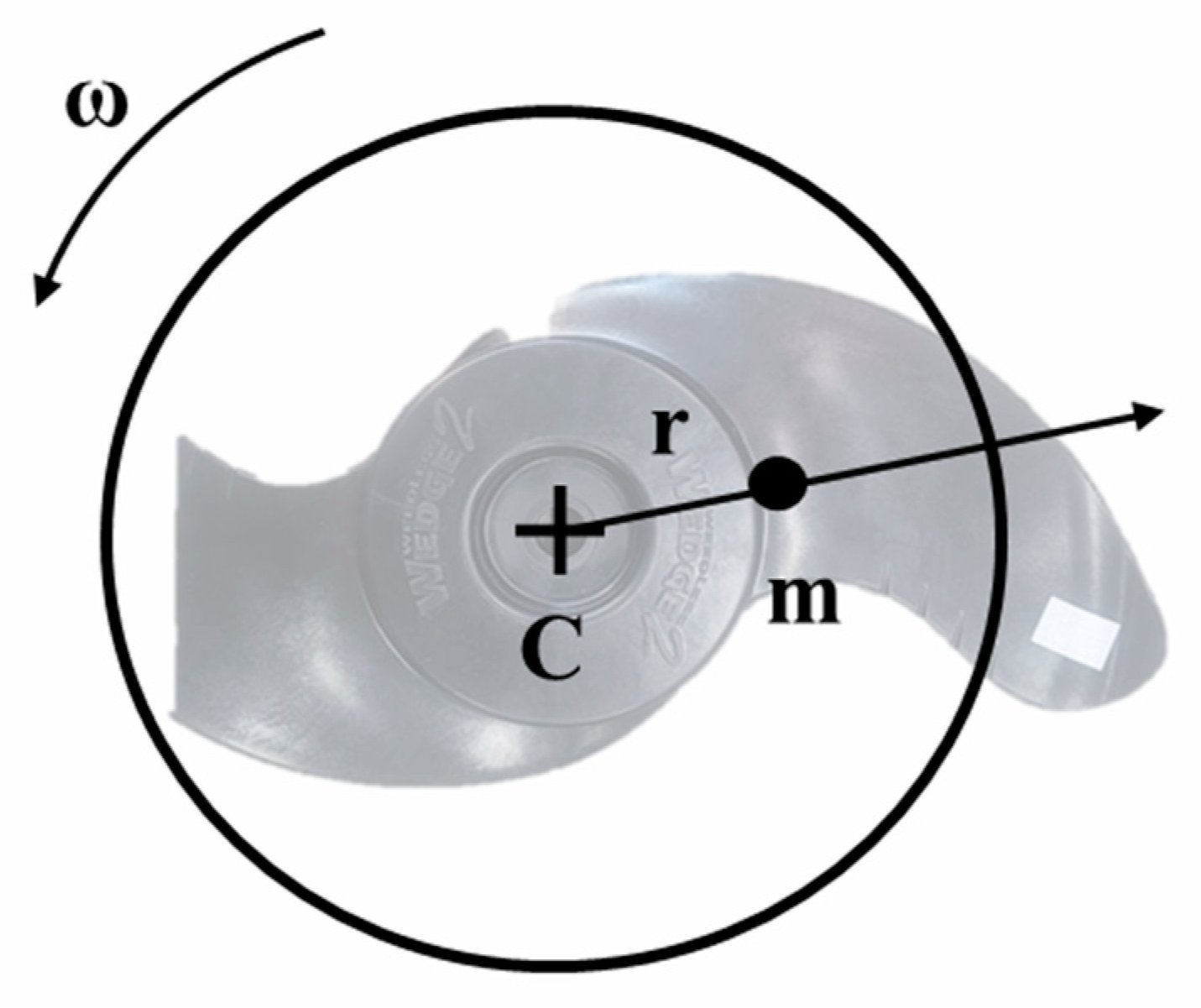
3.1. Fault-Induced Vibromotive Force
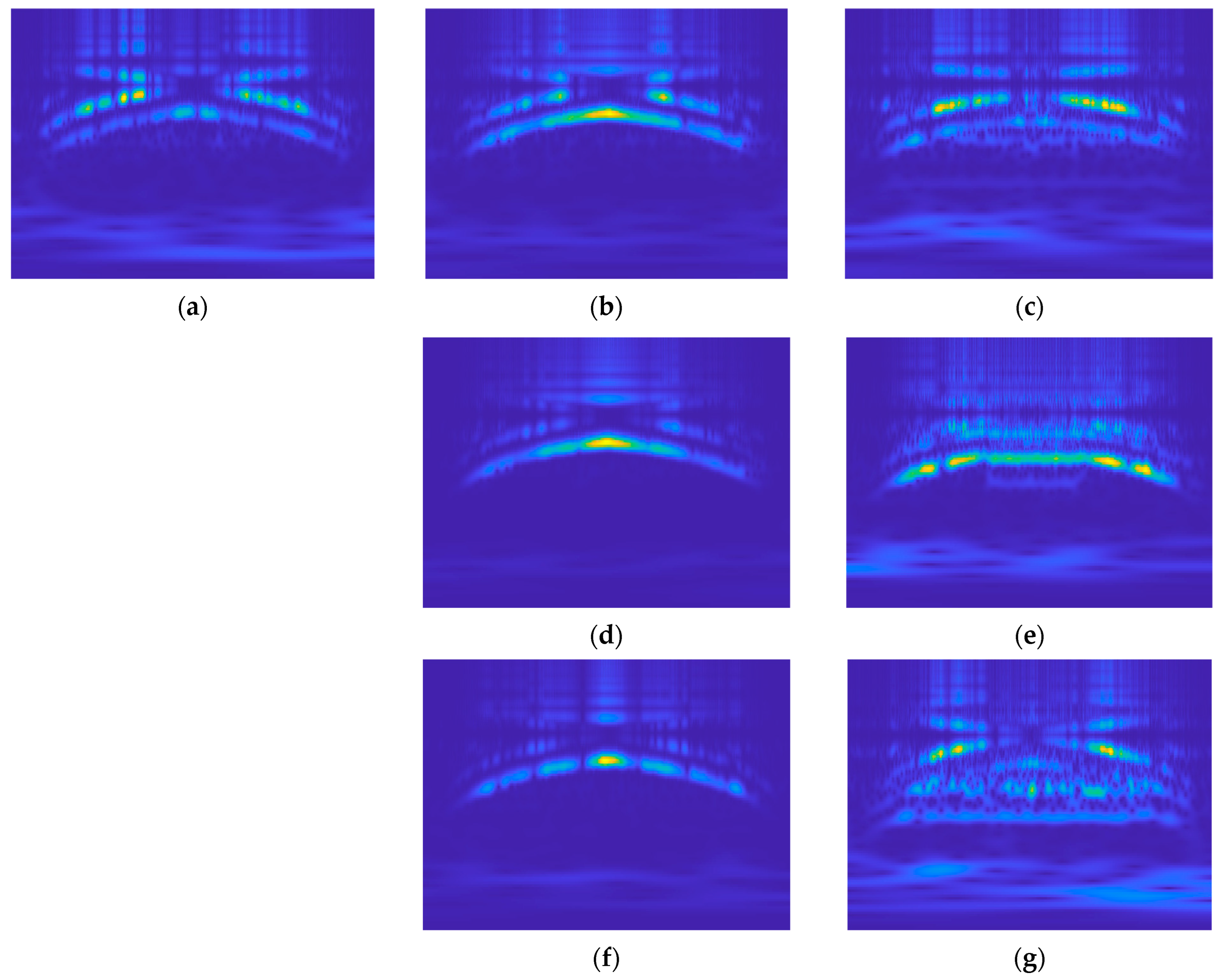
3.2. Wavelets and Continuous Wavelet Transform
- Admissibility condition
- 2
- Finite energy
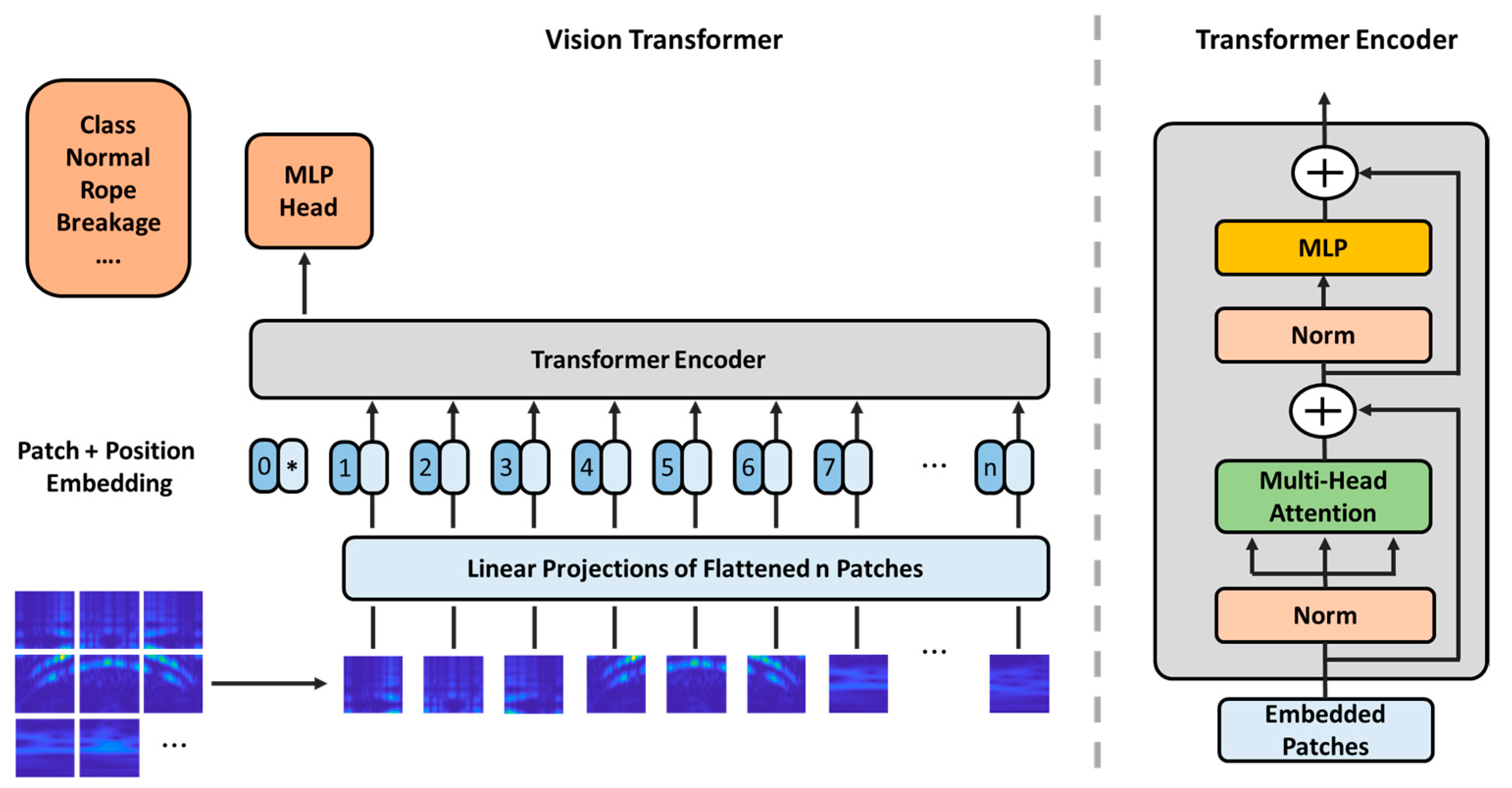
3.3. Vision Transformer (ViT)
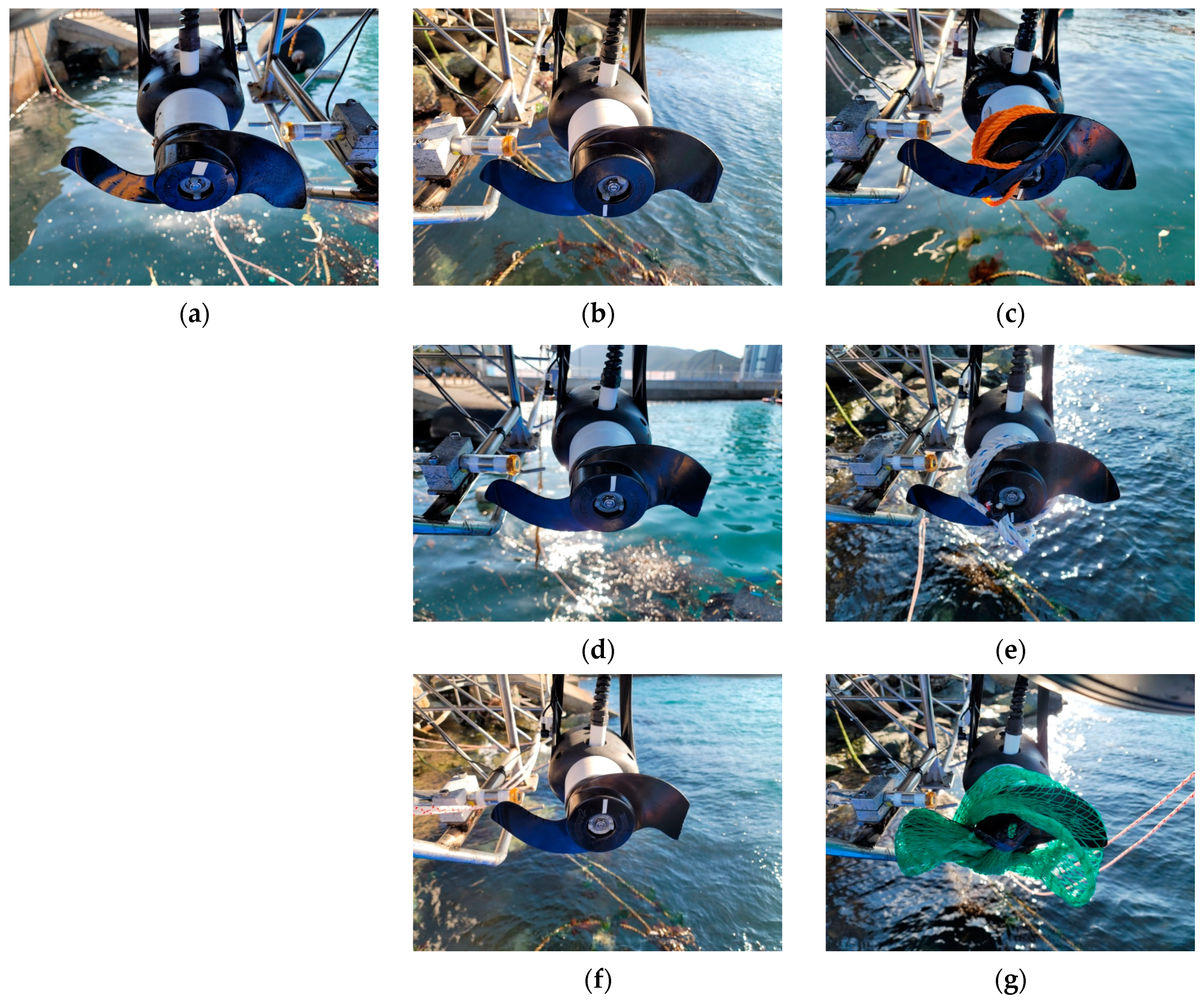
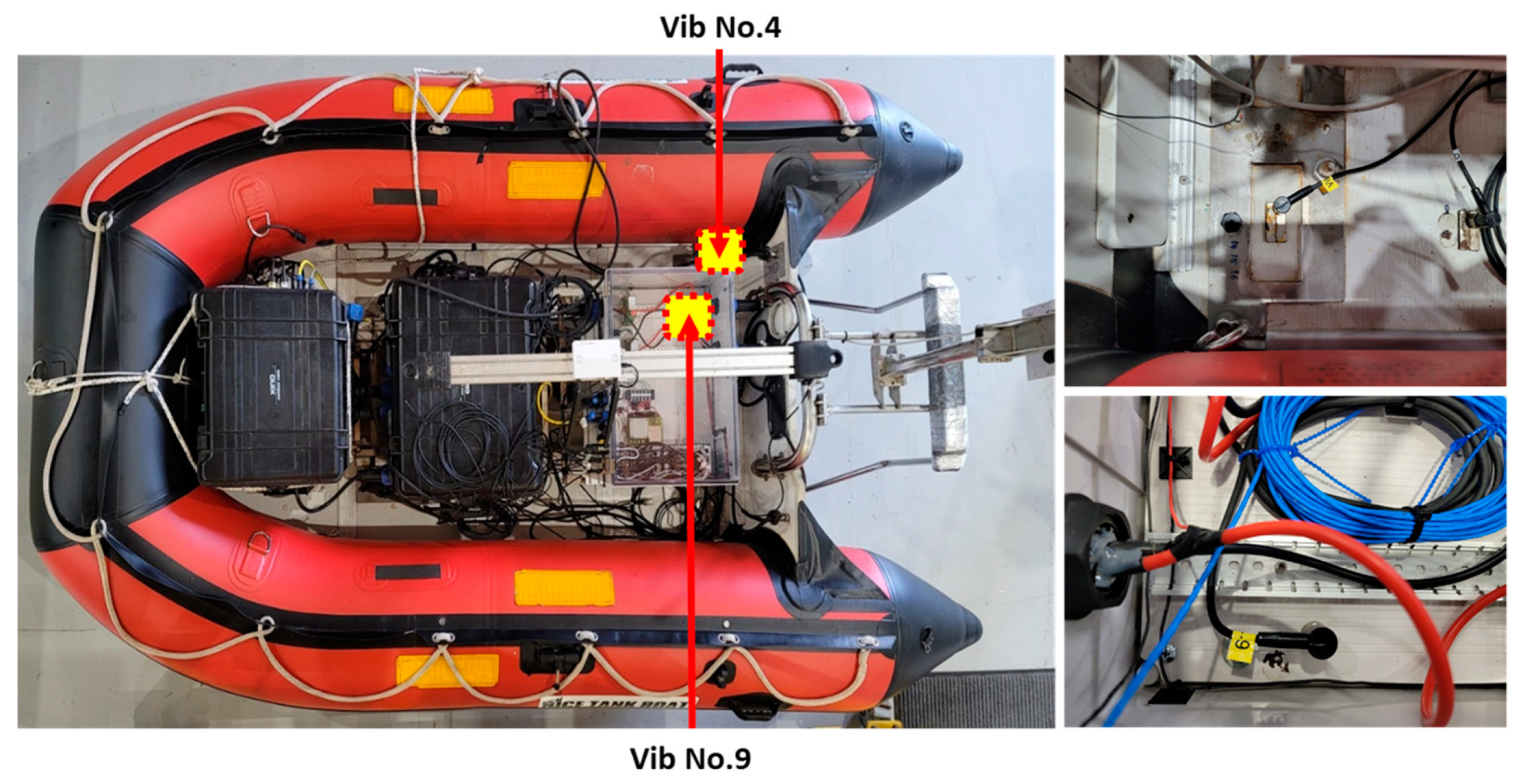
3.4. Experiment Settings
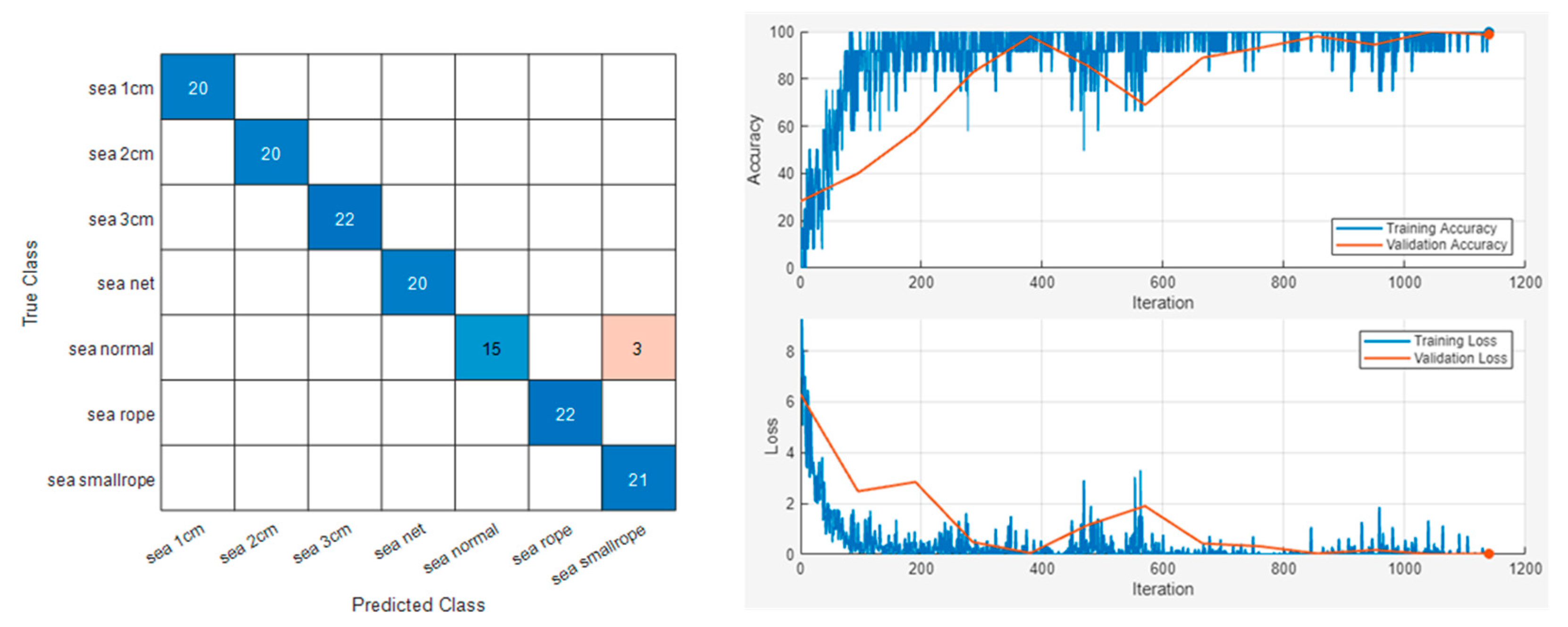
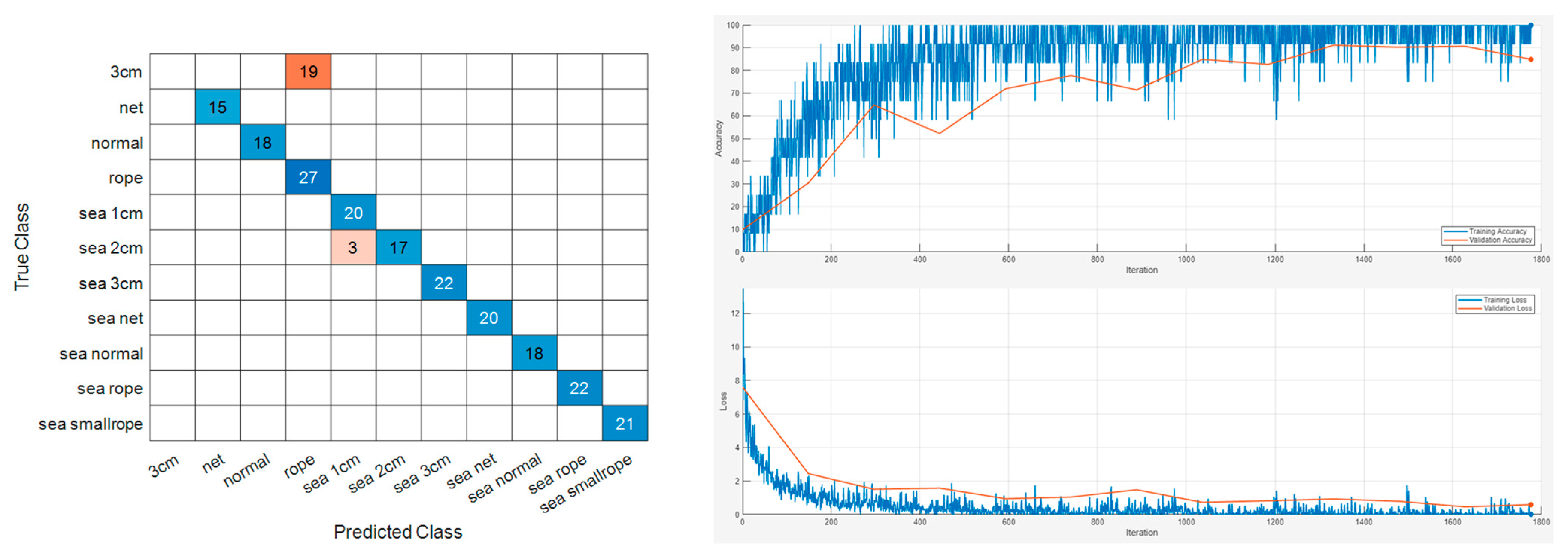
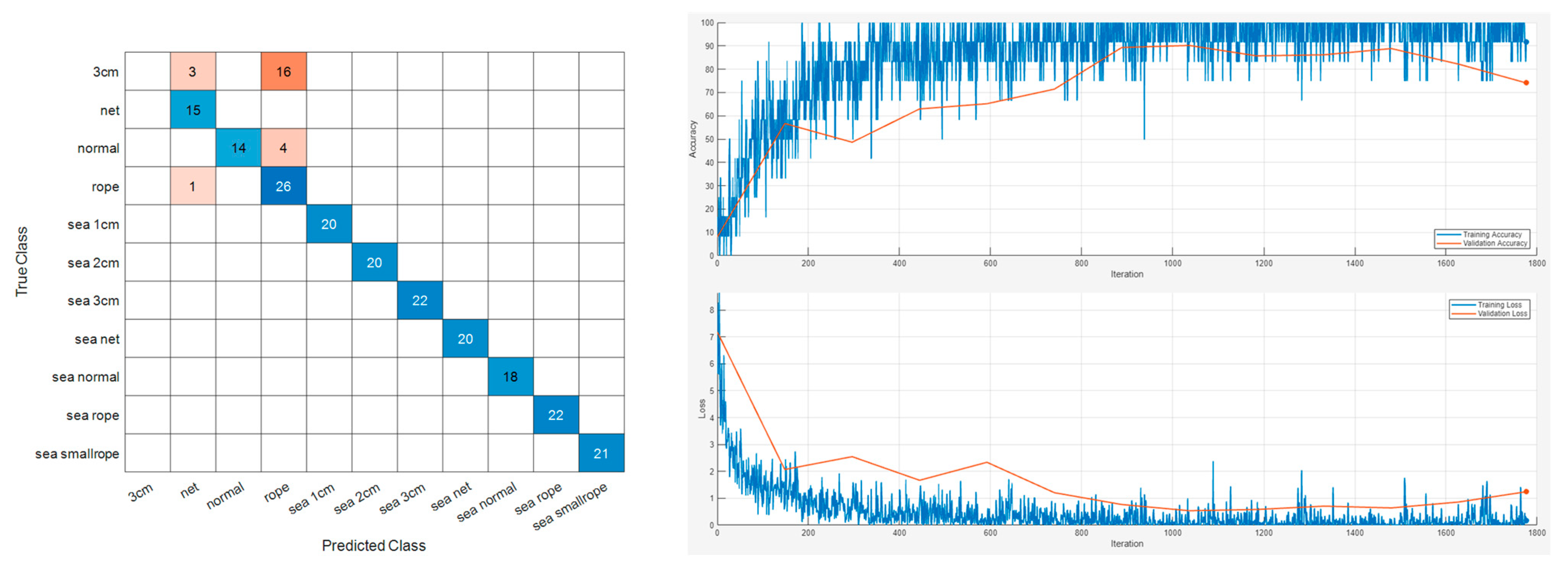
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Martinez, M.J. Harbor and Coastal Structures: A Review of Mechanical Fatigue Under Random Wave Loading. Heliyon 2021, 7, e08241. [Google Scholar] [CrossRef]
- De Gracia, L.; Wang, H.; Mao, W.; Osawa, N.; Rychlik, I.; Storhaug, G. Comparison of Two Statistical Wave Models for Fatigue and Fracture Analysis of Ship Structures. Ocean Eng. 2019, 187, 106161. [Google Scholar] [CrossRef]
- Roche, M.; Bender, R.; Schütze, M. Corrosion Resistance of Steels, Nickel Alloys and Zinc in Aqueous Media; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Zhang, K.; Li, H.; Cheng, H.; Luo, B.; Liu, P. Combined Effects of Seawater Ageing and Fatigue Loading on the Bearing Performance and Failure Mechanism of CFRP/CFRP Single-Lap Bolted Joints. Compos. Struct. 2020, 234, 111677. [Google Scholar] [CrossRef]
- McIlgorm, A.; Campbell, H.F.; Rule, M.J. The Economic Cost and Control of Marine Debris Damage in the Asia-Pacific Region. Ocean Coast. Manag. 2011, 54, 643–651. [Google Scholar] [CrossRef]
- Choi, S.K.; Oh, H.J.; Yun, S.H.; Lee, H.J.; Lee, K.; Han, Y.S.; Kim, S.; Park, S.R. Population Dynamics of the “golden Tides” Seaweed, Sargassum Horneri, on the Southwestern Coast of Korea: The Extent and Formation of Golden Tides. Sustainability 2020, 12, 2903. [Google Scholar] [CrossRef]
- Qi, L.; Cheng, P.; Wang, M.; Hu, C.; Xie, Y.; Mao, K. Where Does Floating Sargassum in the East China Sea Come From? Harmful Algae 2023, 129, 102523. [Google Scholar] [CrossRef]
- Nuchturee, C.; Li, T.; Xia, H. Energy Efficiency of Integrated Electric Propulsion for Ships—A Review. Renew. Sustain. Energy Rev. 2020, 134, 110145. [Google Scholar] [CrossRef]
- Krell, E.; King, S.A.; Garcia Carrillo, L.R. Autonomous Surface Vehicle Energy-Efficient and Reward-Based Path Planning Using Particle Swarm Optimization and Visibility Graphs. Appl. Ocean Res. 2022, 122, 103125. [Google Scholar] [CrossRef]
- Johnston, P.; Marina, C.; Poole, M.; Marina, C. Wave-Propelled Unmanned Surface Vessel (USV). 2017, pp. 3–6. Available online: https://ieeexplore.ieee.org/abstract/document/8084782 (accessed on 27 February 2024).
- Astrov, I.; Udal, A. Neural Predictive Tracking Control of Catamaran Model Sailboat for Situation Awareness Applications. In Proceedings of the INES 2020—IEEE 24th International Conference on Intelligent Engineering Systems, Proceedings, Reykjavik, Iceland, 8–10 July 2020; pp. 153–158. [Google Scholar] [CrossRef]
- Wang, Z.; Carriveau, R.; Ting, D.S.K.; Xiong, W.; Wang, Z. A Review of Marine Renewable Energy Storage. Int. J. Energy Res. 2019, 43, 6108–6150. [Google Scholar] [CrossRef]
- Peša, T.; Krčum, M.; Kero, G.; Šoda, J. Retrofitting Vessel with Solar and Wind Renewable Energy Sources as an Example of the Croatia Study-Case. J. Mar. Sci. Eng. 2022, 10, 1471. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, J.; Yan, X.; Shen, B.; Long, T. A Review of Multi-Energy Hybrid Power System for Ships. Renew. Sustain. Energy Rev. 2020, 132, 110081. [Google Scholar] [CrossRef]
- Thombre, S.; Zhao, Z.; Ramm-Schmidt, H.; Vallet Garcia, J.M.; Malkamaki, T.; Nikolskiy, S.; Hammarberg, T.; Nuortie, H.; Bhuiyan, M.Z.H.; Särkkä, S.; et al. Sensors and AI Techniques for Situational Awareness in Autonomous Ships: A Review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 64–83. [Google Scholar] [CrossRef]
- Zhuang, X.; Xu, Y.; Gao, Y.; Sun, G.; Lin, T.; Chan, C.C.K. Remote Data Transmission Technology Based on BeiDou Satellite Navigation Sensor System Onboard Ship. Sens. Mater. 2021, 33, 715–726. [Google Scholar] [CrossRef]
- Newaliya, N.; Singh, Y. A Review of Maritime Spatio-Temporal Data Analytics. In Proceedings of the 2021 International Conference on Computational Performance Evaluation, ComPE 2021, Virtual, 1–3 December 2021; Institute of Electrical and Electronics Engineers Inc.: New York City, NY, USA, 2021; pp. 219–226. [Google Scholar]
- Karatuğ, Ç.; Arslanoğlu, Y. Development of Condition-Based Maintenance Strategy for Fault Diagnosis for Ship Engine Systems. Ocean Eng. 2022, 256, 111515. [Google Scholar] [CrossRef]
- Xu, X.; Yan, X.; Yang, K.; Zhao, J.; Sheng, C.; Yuan, C. Review of Condition Monitoring and Fault Diagnosis for Marine Power Systems. Transp. Saf. Environ. 2021, 3, 85–102. [Google Scholar] [CrossRef]
- William O’connell, J. Shipboard Fault Detection, Marine Micro-Grid Power Diagnostics and Vessel Ventilation Monitoring. Doctoral Dissertation, Massachusetts Institute of Technology, Cambridge, MA, USA, 2015. [Google Scholar]
- Velasco-Gallego, C.; Navas De Maya, B.; Matutano Molina, C.; Lazakis, I.; Cubo Mateo, N. Recent Advancements in Data-Driven Methodologies for the Fault Diagnosis and Prognosis of Marine Systems: A Systematic Review. Ocean Eng. 2023, 284, 115277. [Google Scholar] [CrossRef]
- Pająk, M.; Kluczyk, M.; Muślewski, Ł.; Lisjak, D.; Kolar, D. Ship Diesel Engine Fault Diagnosis Using Data Science and Machine Learning. Electronics 2023, 12, 3860. [Google Scholar] [CrossRef]
- Capocci, R.; Omerdic, E.; Dooly, G.; Toal, D. Fault-Tolerant Control for ROVs Using Control Reallocation and Power Isolation. J. Mar. Sci. Eng. 2018, 6, 40. [Google Scholar] [CrossRef]
- Serra-Sogas, N.; O’Hara, P.D.; Pearce, K.; Smallshaw, L.; Canessa, R. Using Aerial Surveys to Fill Gaps in AIS Vessel Traffic Data to Inform Threat Assessments, Vessel Management and Planning. Mar. Policy 2021, 133, 104765. [Google Scholar] [CrossRef]
- Henriquez, P.; Alonso, J.B.; Ferrer, M.A.; Travieso, C.M. Review of Automatic Fault Diagnosis Systems Using Audio and Vibration Signals. IEEE Trans. Syst. Man. Cybern. Syst. 2014, 44, 642–652. [Google Scholar] [CrossRef]
- Tama, B.A.; Vania, M.; Lee, S.; Lim, S. Recent Advances in the Application of Deep Learning for Fault Diagnosis of Rotating Machinery Using Vibration Signals. Artif. Intell. Rev. 2023, 56, 4667–4709. [Google Scholar] [CrossRef]
- Genta, G. Dynamics of Rotating Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 53, ISBN 9788578110796. [Google Scholar]
- Yucel, A.; Arpaci, A. Free and Forced Vibration Analyses of Ship Structures Using the Finite Element Method. J. Mar. Sci. Technol. 2013, 18, 324–338. [Google Scholar] [CrossRef]
- Varanis, M.; Silva, A.L.; Balthazar, J.M.; Pederiva, R. A Tutorial Review on Time-Frequency Analysis of Non-Stationary Vibration Signals with Nonlinear Dynamics Applications. Braz. J. Phys. 2021, 51, 859–877. [Google Scholar] [CrossRef]
- Addison, P.S. The Illustrated Wavelet Transform Handbook: Introductory Theory and Applications in Science, Engineering, Medicine and Finance; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Rioul, O.; Vetterli, M. Wavelets and signal processing. IEEE Signal Process. Mag. 1991, 8, 14–38. [Google Scholar] [CrossRef]
- Kemp, M.P. Underwater Thruster Fault Detection and Isolation. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Tsai, C.M.; Wang, C.S.; Chung, Y.J.; Sun, Y.D.; Perng, J.W. Multi-Sensor Fault Diagnosis of Underwater Thruster Propeller Based on Deep Learning. Sensors 2021, 21, 7187. [Google Scholar] [CrossRef]
- Yuan, J.; Wan, J.; Zhang, W.; Liu, H.; Zhang, H. An Underwater Thruster Fault Diagnosis Simulator and Thrust Calculation Method Based on Fault Clustering. J. Robot. 2021, 2021, 1–10. [Google Scholar] [CrossRef]
- He, C.; Shi, H.; Si, J.; Li, J. Physics-Informed Interpretable Wavelet Weight Initialization and Balanced Dynamic Adaptive Threshold for Intelligent Fault Diagnosis of Rolling Bearings. J. Manuf. Syst. 2023, 70, 579–592. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An Image Is Worth 16x16 Words: Transformers for Image Recognition at Scale. arXiv 2020, arXiv:2010.11929. [Google Scholar]
- Yusoff, M.A.M.; Arshad, M.R. Active Fault Tolerant Control of a Remotely Operated Vehicle Propulsion System. Procedia Eng. 2012, 41, 622–628. [Google Scholar] [CrossRef]
- Liu, F.; Tang, H.; Qin, Y.; Duan, C.; Luo, J.; Pu, H. Review on Fault Diagnosis of Unmanned Underwater Vehicles. Ocean Eng. 2022, 243, 110290. [Google Scholar] [CrossRef]
- Antonelli, G.; Meridionale, L.; View, D.; Antonelli, G. A Survey of Fault Detection/Tolerance Strategies for AUVs and ROVs. In Fault Diagnosis and Fault Tolerance for Mechatronic Systems: Recent Advances; Springer: Berlin/Heidelberg, Germany, 2015; pp. 109–127. [Google Scholar]
- Falkenberg, T.; Gregersen, R.T.; Blanke, M. Navigation System Fault Diagnosis for Underwater Vehicle. IFAC Proc. Vol. (IFAC-PapersOnline) 2014, 19, 9654–9660. [Google Scholar] [CrossRef]
- Chen, X.; Bose, N.; Brito, M.; Khan, F.; Thanyamanta, B.; Zou, T. A Review of Risk Analysis Research for the Operations of Autonomous Underwater Vehicles. Reliab. Eng. Syst. Saf. 2021, 216, 108011. [Google Scholar] [CrossRef]
- Zakaria, W.N.W.; Mahmood, I.A.T.; Shamsudin, A.U.; Rahman, M.A.A.; Tomari, M.R.M. ROS-Based SLAM and Path Planning for Autonomous Unmanned Surface Vehicle Navigation System. In Proceedings of the 2022 IEEE 5th International Symposium in Robotics and Manufacturing Automation, ROMA 2022, Malacca, Malaysia, 6–8 August 2022; pp. 6–8. [Google Scholar] [CrossRef]
- Heiberg, A.; Larsen, T.N.; Meyer, E.; Rasheed, A.; San, O.; Varagnolo, D. Risk-Based Implementation of COLREGs for Autonomous Surface Vehicles Using Deep Reinforcement Learning. Neural Netw. 2022, 152, 17–33. [Google Scholar] [CrossRef]
- Nascimento, S.; Valdenegro-Toro, M. Modeling and Soft-Fault Diagnosis of Underwater Thrusters with Recurrent Neural Networks; Elsevier: Amsterdam, The Netherlands, 2018; Volume 51, pp. 80–85. [Google Scholar]
- Zhang, Y.; Geng, J.; Wang, N. Correlation analysis and fault detection of current and speed signals for underwater thruster entanglement. Adv. Control Appl. Eng. Ind. Syst. 2023, e145. [Google Scholar] [CrossRef]
- Cho, H.; Choi, H.S.; Kim, H.J.; Nam, K.S.; Ryu, J.D.; Ha, K.N. Feature Selection for Unmanned Surface Vehicle Fault Diagnosis Research and Experimental Verification. J. Inst. Control Robot. Syst. 2022, 28, 542–550. [Google Scholar] [CrossRef]
- Choo, K.-B.; Cho, H.; Park, J.-H.; Huang, J.; Jung, D.; Lee, J.; Jeong, S.-K.; Yoon, J.; Choo, J.; Choi, H.-S. A Research on Fault Diagnosis of a USV Thruster Based on PCA and Entropy. Appl. Sci. 2023, 13, 3344. [Google Scholar] [CrossRef]
- Yan, R.; Shang, Z.; Xu, H.; Wen, J.; Zhao, Z.; Chen, X.; Gao, R.X. Wavelet Transform for Rotary Machine Fault Diagnosis:10 Years Revisited. Mech. Syst. Signal Process 2023, 200, 110545. [Google Scholar] [CrossRef]
- Tuli, S.; Dasgupta, I.; Grant, E.; Griffiths, T.L. Are Convolutional Neural Networks or Transformers More like Human Vision? arXiv 2021, arXiv:2105.07197. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Normal | Breakage 7% | Breakage 14% | Breakage 21% |
|---|---|---|---|---|
| Number of data | 185 | 200 | 200 | 220 |
| Type | Thin rope entanglement | Rope Entanglement | Net entanglement | |
| Number of data | 210 | 218 | 203 | |
| Type * | Normal * | Breakage 21% * | Thin rope entanglement * | Net entanglement * |
| Number of data | 191 | 194 | 269 | 150 |
| Parameters | Value |
|---|---|
| Input image size | [384, 384, 3] |
| Number of Transformer blocks | 12 |
| Number of attention heads | 12 |
| Position encoding dimension | 2D |
| Optimizer | Adam (learning rate: ) |
| Layer | 143 |
| Patch size | 16 |
| Batch size | 12 |
| Max epoch | 12 |
| Dropout probability | 0.1 |
| Attention dropout probability | 0.1 |
| Sensor Number | Accuracy |
|---|---|
| Vib No.4 | 0.9790 |
| Vib No.4 | 0.9840 |
| Vib No.4 | 0.9790 |
| Vib No.4 | 1 |
| Vib No.9 | 1 |
| Vib No.9 | 1 |
| Vib No.9 | 0.9790 |
| Vib No.9 | 0.9840 |
| Sensor Number | Accuracy |
|---|---|
| Vib No.4 | 0.9009 |
| Vib No.4 | 0.9054 |
| Vib No.4 | 0.9009 |
| Vib No.4 | 0.8964 |
| Vib No.9 | 0.8919 |
| Vib No.9 | 0.8649 |
| Vib No.9 | 0.8873 |
| Vib No.9 | 0.8603 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, H.; Park, J.-H.; Choo, K.-B.; Kim, M.; Ji, D.-H.; Choi, H.-S. Unmanned Surface Vehicle Thruster Fault Diagnosis via Vibration Signal Wavelet Transform and Vision Transformer under Varying Rotational Speed Conditions. Sensors 2024, 24, 1697. https://doi.org/10.3390/s24051697
Cho H, Park J-H, Choo K-B, Kim M, Ji D-H, Choi H-S. Unmanned Surface Vehicle Thruster Fault Diagnosis via Vibration Signal Wavelet Transform and Vision Transformer under Varying Rotational Speed Conditions. Sensors. 2024; 24(5):1697. https://doi.org/10.3390/s24051697
Chicago/Turabian StyleCho, Hyunjoon, Jung-Hyeun Park, Ki-Beom Choo, Myungjun Kim, Dae-Hyeong Ji, and Hyeung-Sik Choi. 2024. "Unmanned Surface Vehicle Thruster Fault Diagnosis via Vibration Signal Wavelet Transform and Vision Transformer under Varying Rotational Speed Conditions" Sensors 24, no. 5: 1697. https://doi.org/10.3390/s24051697
APA StyleCho, H., Park, J.-H., Choo, K.-B., Kim, M., Ji, D.-H., & Choi, H.-S. (2024). Unmanned Surface Vehicle Thruster Fault Diagnosis via Vibration Signal Wavelet Transform and Vision Transformer under Varying Rotational Speed Conditions. Sensors, 24(5), 1697. https://doi.org/10.3390/s24051697