
Design and Characterization of a Powered Wheelchair Autonomous Guidance System





Abstract
1. Introduction
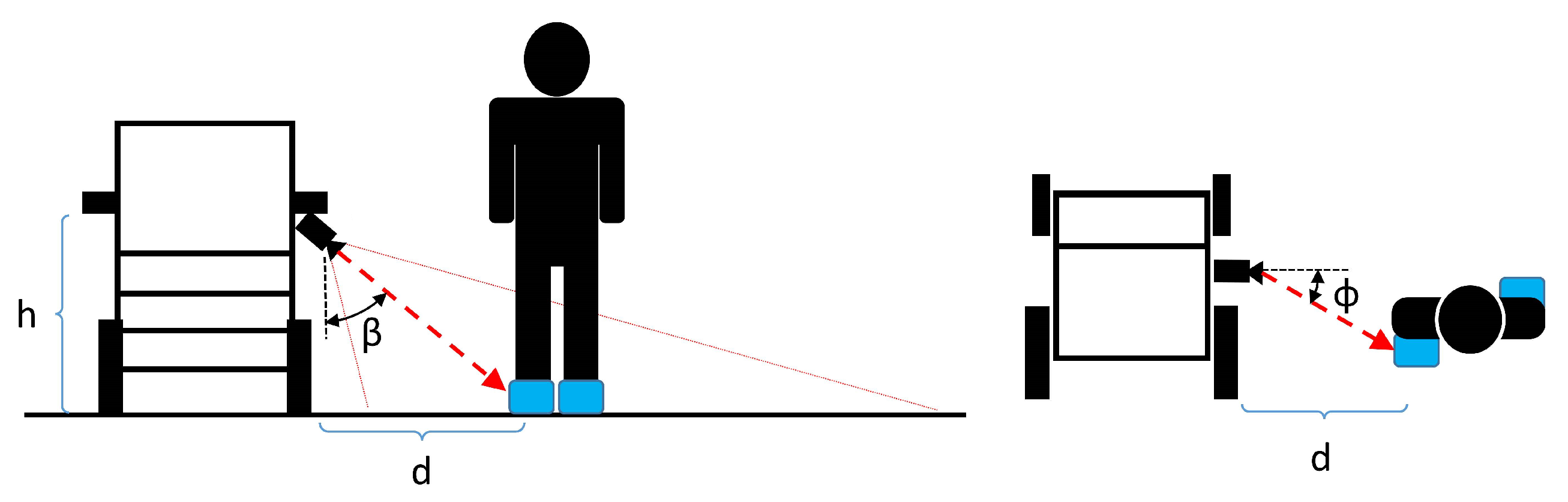
- Development of a measurement methodology for autonomous driving of a PW based on a monocular camera and an object detection neural network;
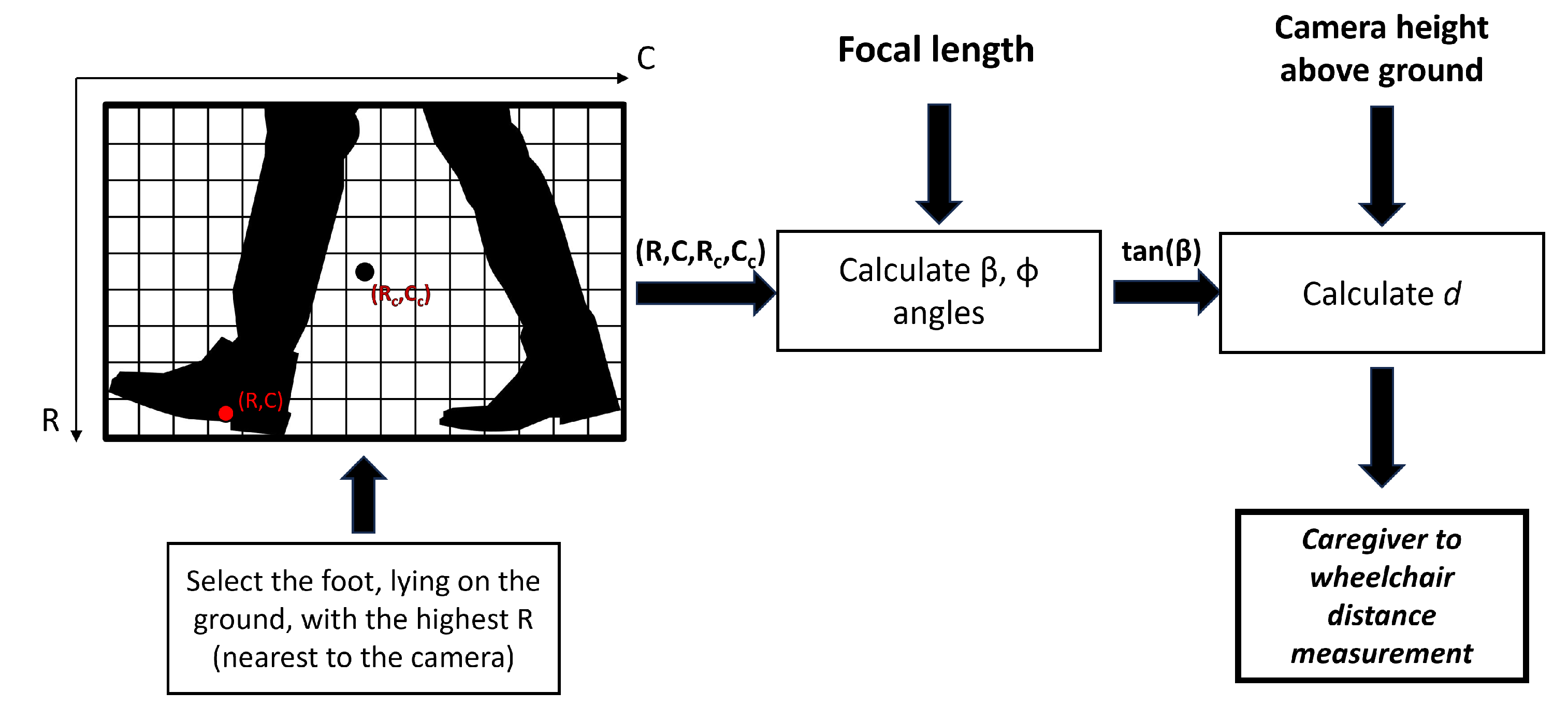
- Creation of an object detection dataset that can independently classify whether the foot present in the scene is resting on the ground or not, with the aim of mitigating parallax errors due to the use of a monocular camera
- Metrological characterization of the measurement system. This is achieved by calibrating the camera used for acquisitions, correcting for systematic effects on the instrument’s calibration curve, assessing its uncertainty, and evaluating the entire instrument’s uncertainty;
- Evaluation of the metrological performance for the distance to caregiver measured with the proposed method compared with LiDAR and stereo-camera-based systems;
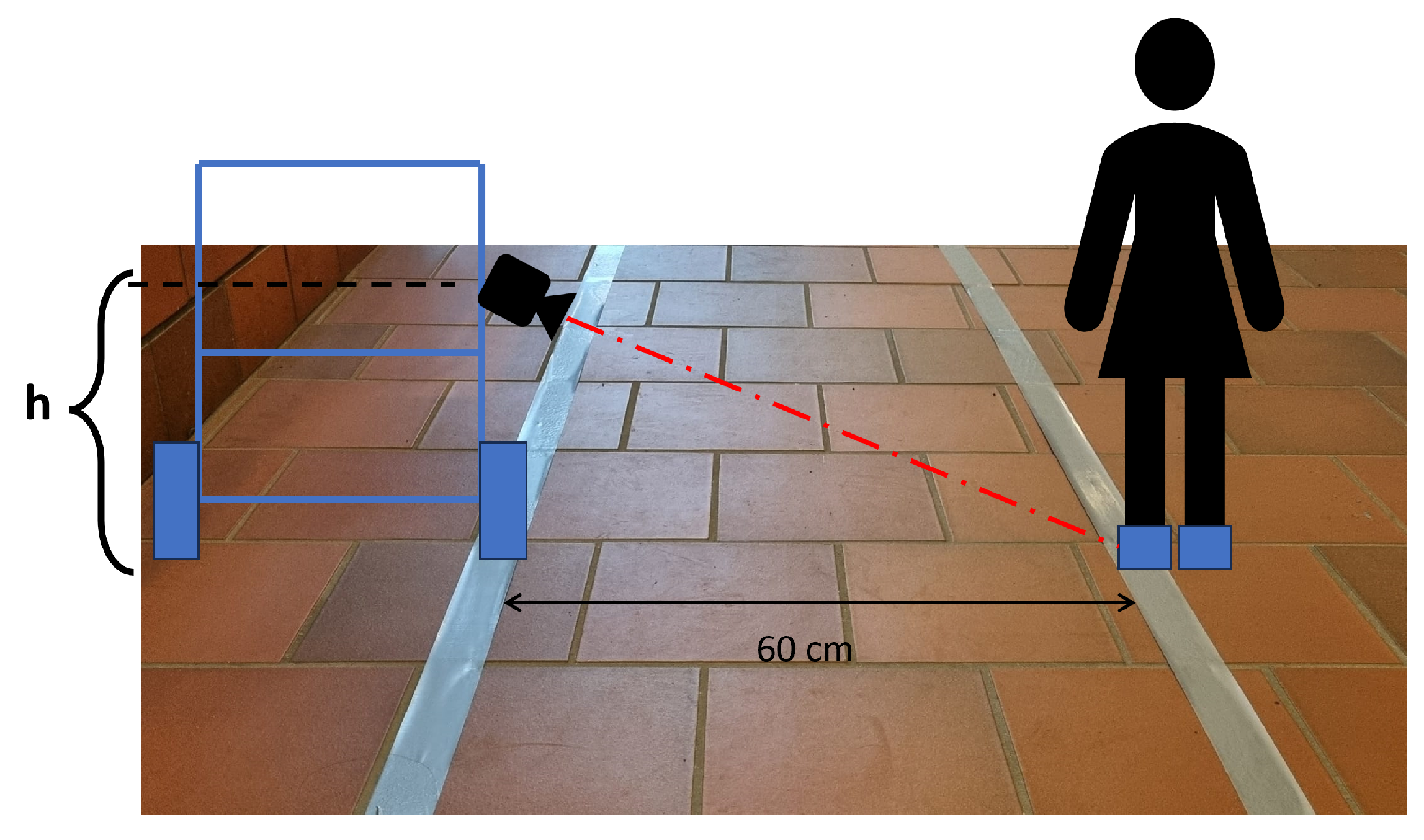
- Deployment of the proposed system on a PW in a real-case scenario.
2. Object Detection State-of-the-Art
2.1. Depth Images
2.2. Two-Dimensional Images
- Object segmentation, where each pixel in the image is classified according to whether it belongs to the foreground or background;
- Positional object detection, where the object is identified either by multiple classification tasks performed with sliding windows or by algorithms based on probability areas (YOLO).
3. Camera Setup and Dataset Definition
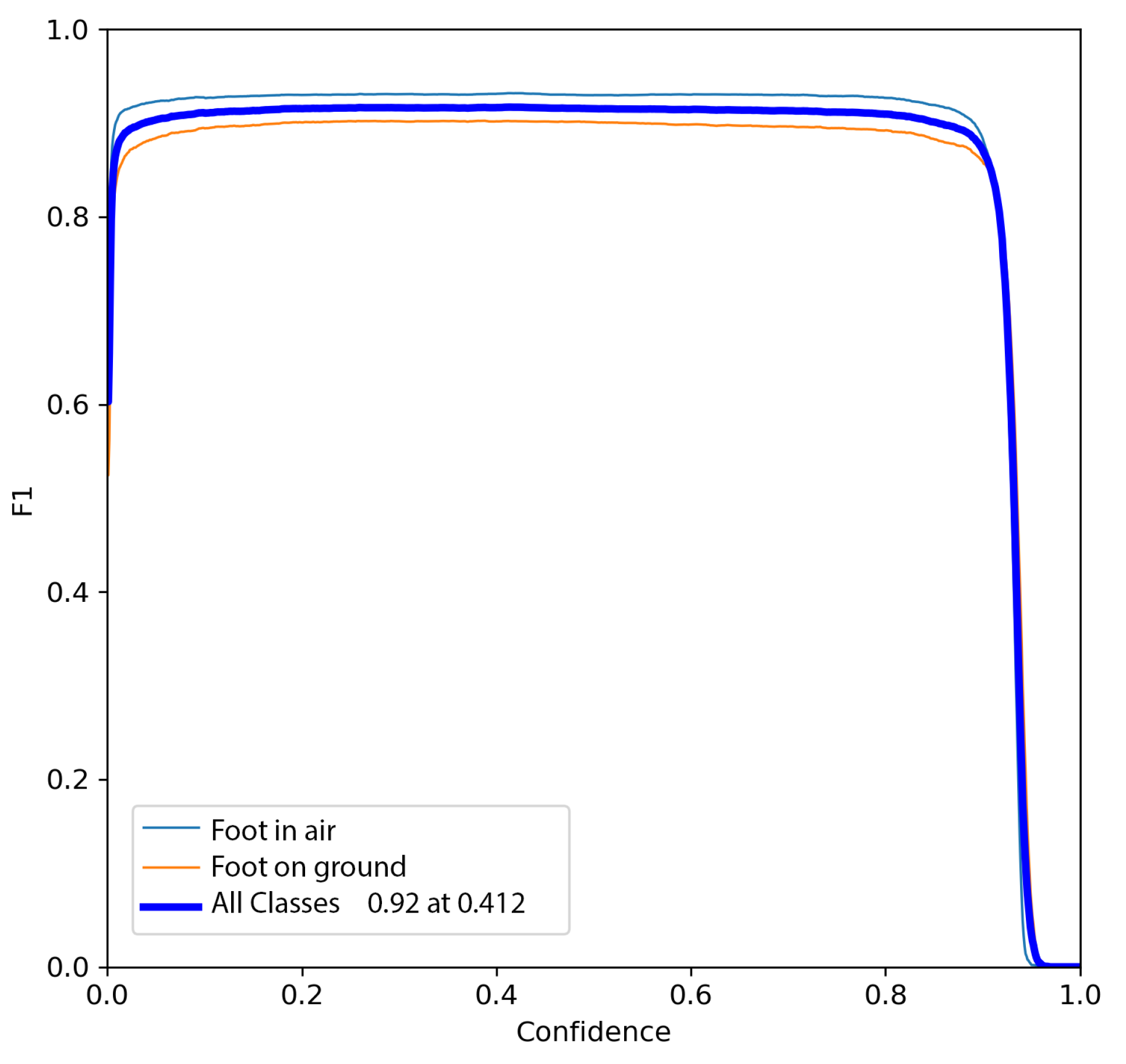
4. Training Results
5. Instrument Calibration
5.1. Camera Calibration
5.2. Calibration Curve
6. Metrological Characterization
6.1. Measurement Uncertainty Estimation
6.2. RMSE and Maximum Error
7. Discussion
7.1. Metrological Performance Comparison
7.2. Use Case Scenario Deployment
8. Conclusions
- The methodology finds applicability in the context of autonomous navigation of Powered Wheelchairs, enabling people with severe motor disabilities to use this type of wheelchair.
- Compared with object detection techniques for three-dimensional point clusters, overcoming their limitations and difficulties, the proposed measurement methodology proved less complex in hardware set-up and software deployment.
- The metrological performances obtained by the proposed system have been comparable with those of methodologies based on LiDAR and stereo cameras, making the proposal suitable for implementation in the autonomous navigation setup of future Powered Wheelchairs, optimizing design and costs, and facilitating their diffusion into the market.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sprenger, F. Microdecisions and autonomy in self-driving cars: Virtual probabilities. AI Soc. 2022, 37, 619–634. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, Q.; Zhang, Y.; Ge, X.; Gao, X.; Yang, S.; Xu, J. Lane-change intention prediction using eye-tracking technology: A systematic review. Appl. Ergon. 2022, 103, 103775. [Google Scholar] [CrossRef] [PubMed]
- Chitanvis, R.; Ravi, N.; Zantye, T.; El-Sharkawy, M. Collision avoidance and Drone surveillance using Thread protocol in V2V and V2I communications. In Proceedings of the 2019 IEEE National Aerospace and Electronics Conference (NAECON), Dayton, OH, USA, 15–19 July 2019; pp. 406–411. [Google Scholar] [CrossRef]
- Raj, T.; Hashim, F.H.; Huddin, A.B.; Ibrahim, M.F.; Hussain, A. A Survey on LiDAR Scanning Mechanisms. Electronics 2020, 9, 741. [Google Scholar] [CrossRef]
- Stefano, F.D.; Chiappini, S.; Gorreja, A.; Balestra, M.; Pierdicca, R. Mobile 3D scan LiDAR: A literature review. Geomat. Nat. Hazards Risk 2021, 12, 2387–2429. [Google Scholar] [CrossRef]
- Gallo, V.; Shallari, I.; Carratu, M.; O’Nils, M. Metrological Characterization of a Clip Fastener assembly fault detection system based on Deep Learning. In Proceedings of the 2023 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Kuala Lumpur, Malaysia, 22–25 May 2023; pp. 1–6. [Google Scholar]
- Meng, J.; Wang, S.; Xie, Y.; Li, G.; Zhang, X.; Jiang, L.; Liu, C. A safe and efficient LIDAR-based navigation system for 4WS4WD mobile manipulators in manufacturing plants. Meas. Sci. Technol. 2021, 32, 045203. [Google Scholar] [CrossRef]
- Kristiansen, L. Wanting a Life in Decency!—A Qualitative Study from Experienced Electric Wheelchairs Users’ perspective. Open J. Nurs. 2018, 8, 419–433. [Google Scholar] [CrossRef]
- Pancholi, S.; Wachs, J.P.; Duerstock, B.S. Use of Artificial Intelligence Techniques to Assist Individuals with Physical Disabilities. Annu. Rev. Biomed. Eng. 2024, 26. [Google Scholar] [CrossRef]
- Chatzidimitriadis, S.; Bafti, S.M.; Sirlantzis, K. Non-Intrusive Head Movement Control for Powered Wheelchairs: A Vision-Based Approach. IEEE Access 2023, 11, 65663–65674. [Google Scholar] [CrossRef]
- Xiong, M.; Hotter, R.; Nadin, D.; Patel, J.; Tartakovsky, S.; Wang, Y.; Patel, H.; Axon, C.; Bosiljevac, H.; Brandenberger, A.; et al. A low-cost, semi-autonomous wheelchair controlled by motor imagery and jaw muscle activation. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 2180–2185. [Google Scholar]
- Kader, M.A.; Alam, M.E.; Jahan, N.; Bhuiyan, M.A.B.; Alam, M.S.; Sultana, Z. Design and implementation of a head motion-controlled semi-autonomous wheelchair for quadriplegic patients based on 3-axis accelerometer. In Proceedings of the 2019 22nd International Conference on Computer and Information Technology (ICCIT), Dhaka, Bangladesh, 18–20 December 2019; pp. 1–6. [Google Scholar]
- Subramanian, M.; Songur, N.; Adjei, D.; Orlov, P.; Faisal, A.A. A. Eye Drive: Gaze-based semi-autonomous wheelchair interface. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 5967–5970. [Google Scholar]
- Grewal, H.S.; Jayaprakash, N.T.; Matthews, A.; Shrivastav, C.; George, K. Autonomous wheelchair navigation in unmapped indoor environments. In Proceedings of the 2018 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Houston, TX, USA, 14–17 May 2018; pp. 1–6. [Google Scholar]
- Grewal, H.; Matthews, A.; Tea, R.; George, K. LIDAR-based autonomous wheelchair. In Proceedings of the 2017 IEEE Sensors Applications Symposium (SAS), Glassboro, NJ, USA, 13–15 March 2017; pp. 1–6. [Google Scholar]
- Li, Z.; Xiong, Y.; Zhou, L. ROS-based indoor autonomous exploration and navigation wheelchair. In Proceedings of the 2017 10th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 9–10 December 2017; Volume 2, pp. 132–135. [Google Scholar]
- Kobayashi, Y.; Suzuki, R.; Kuno, Y. Robotic wheelchair with omni-directional vision for moving alongside a caregiver. In Proceedings of the IECON 2012-38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 4177–4182. [Google Scholar]
- Kobayashi, T.; Chugo, D.; Yokota, S.; Muramatsu, S.; Hashimoto, H. Design of personal mobility motion based on cooperative movement with a companion. In Proceedings of the 2015 6th IEEE International Conference on Cognitive Infocommunications (CogInfoCom), Gyor, Hungary, 19–21 October 2015; pp. 165–170. [Google Scholar]
- Motokucho, T.; Oda, N. Vision-based human-following control using optical flow field for power assisted wheelchair. In Proceedings of the 2014 IEEE 13th International Workshop on Advanced Motion Control (AMC), Yokohama, Japan, 14–16 March 2014; pp. 266–271. [Google Scholar]
- Sarker, M.A.B.; Sola-Thomas, E.; Jamieson, C.; Imtiaz, M.H. Autonomous Movement of Wheelchair by Cameras and YOLOv7. Eng. Proc. 2023, 31, 60. [Google Scholar] [CrossRef]
- Giménez, C.V.; Krug, S.; Qureshi, F.Z.; O’Nils, M. Evaluation of 2D-/3D-Feet-Detection Methods for Semi-Autonomous Powered Wheelchair Navigation. J. Imaging 2021, 7, 255. [Google Scholar] [CrossRef]
- Shallari, I.; Gallo, V.; Carratu, M.; O’Nils, M.; Liguori, C.; Hussain, M. Image Scaling Effects on Deep Learning Based Applications. In Proceedings of the 2022 IEEE International Symposium on Measurements and Networking, Padua, Italy, 18–20 July 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, R.; An, M.; Shao, S.; Yu, M.; Wang, S.; Xu, X. Lidar Sensor-Based Object Recognition Using Machine Learning. J. Russ. Laser Res. 2021, 42, 484–493. [Google Scholar] [CrossRef]
- Buch, N.E.; Orwell, J.; Velastín, S.A. 3D Extended Histogram of Oriented Gradients (3DHOG) for Classification of Road Users in Urban Scenes. In Proceedings of the BMVC, London, UK, 7–10 September 2009. [Google Scholar]
- Guo, Y.; Wang, H.; Hu, Q.; Liu, H.; Liu, L.; Bennamoun, M. Deep Learning for 3D Point Clouds: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 4338–4364. [Google Scholar] [CrossRef]
- Hao, N. 3D Object Detection from Point Cloud Based on Deep Learning. Wirel. Commun. Mob. Comput. 2022, 2022, 6228797. [Google Scholar] [CrossRef]
- Khan, S.H.; Rahmani, H.; Shah, S.A.A.; Bennamoun, M. A Guide to Convolutional Neural Networks for Computer Vision. In Proceedings of the A Guide to Convolutional Neural Networks for Computer Vision; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Jogin, M.; Mohana; Madhulika, M.S.; Divya, G.D.; Meghana, R.K.; Apoorva, S. Feature Extraction using Convolution Neural Networks (CNN) and Deep Learning. In Proceedings of the 2018 3rd IEEE International Conference on Recent Trends in Electronics, Information AND Communication Technology (RTEICT), Bangalore, India, 18–19 May 2018; pp. 2319–2323. [Google Scholar] [CrossRef]
- Basics of the Classic CNN. 2019. Available online: https://towardsdatascience.com/basics-of-the-classic-cnn-a3dce1225add (accessed on 1 January 2024).
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 886–893. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, J. Object detection in X-ray images based on object candidate extraction and support vector machine. In Proceedings of the 2013 Ninth International Conference on Natural Computation (ICNC), Shenyang, China, 23–25 July 2013; pp. 173–177. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Region-Based Convolutional Networks for Accurate Object Detection and Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 142–158. [Google Scholar] [CrossRef]
- Glumov, N.; Kolomiyetz, E.; Sergeyev, V. Detection of objects on the image using a sliding window mode. Opt. Laser Technol. 1995, 27, 241–249. [Google Scholar] [CrossRef]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-FCN: Object Detection via Region-Based Fully Convolutional Networks. In Proceedings of the NIPS’16 30th International Conference on Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; pp. 379–387. [Google Scholar]
- Lin, T.; Goyal, P.; Girshick, R.; He, K.; Dollar, P. Focal Loss for Dense Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 318–327. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Computer Vision—ECCV 2016; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2016; pp. 21–37. [Google Scholar]
- Fu, C.Y.; Liu, W.; Ranga, A.; Tyagi, A.; Berg, A.C. DSSD: Deconvolutional Single Shot Detector. arXiv 2017, arXiv:1701.06659. [Google Scholar]
- Anushka; Arya, C.; Tripathi, A.; Singh, P.; Diwakar, M.; Sharma, K.; Pandey, H. Object Detection using Deep Learning: A Review. J. Phys. Conf. Ser. 2021, 1854, 012012. [Google Scholar] [CrossRef]
- Tan, L.; Huangfu, T.; Wu, L.; Chen, W. Comparison of RetinaNet, SSD, and YOLO v3 for real-time pill identification. BMC Med. Inform. Decis. Mak. 2021, 21, 324. [Google Scholar] [CrossRef] [PubMed]
- Nepal, U.; Eslamiat, H. Comparing YOLOv3, YOLOv4 and YOLOv5 for Autonomous Landing Spot Detection in Faulty UAVs. Sensors 2022, 22, 464. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Guide to the Expression of Uncertainty in Measurement (GUM); International Organization for Standardization: Geneva, Switzerland, 2004; Available online: https://www.iso.org/sites/JCGM/GUM-introduction.htm (accessed on 1 January 2024).
- Intel RealSense D400 Series Product Family Datasheet. Available online: https://www.intelrealsense.com/wp-content/uploads/2020/06/Intel-RealSense-D400-Series-Datasheet-June-2020.pdf (accessed on 1 January 2024).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Column Value | Row Value | |
|---|---|---|
| Focal Lenght (Pixels) | ||
| Principal Point (Pixels) | ||
| Radial Distorsion | ||
| Image Size | 1280 | 720 |
| Calibration Points | |
|---|---|
| 0.780 m | 0.001 m |
| 0.950 m | 0.003 m |
| 1.140 m | 0.009 m |
| 1.400 m | 0.016 m |
| Proposed System | LiDAR | Stereo Camera | |
|---|---|---|---|
| Maximum absolute error (m) | |||
| Expanded uncertainty (CL 95%) (m) | |||
| RMSE (m) | |||
| Instrument Class | 2 | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gallo, V.; Shallari, I.; Carratù, M.; Laino, V.; Liguori, C. Design and Characterization of a Powered Wheelchair Autonomous Guidance System. Sensors 2024, 24, 1581. https://doi.org/10.3390/s24051581
Gallo V, Shallari I, Carratù M, Laino V, Liguori C. Design and Characterization of a Powered Wheelchair Autonomous Guidance System. Sensors. 2024; 24(5):1581. https://doi.org/10.3390/s24051581
Chicago/Turabian StyleGallo, Vincenzo, Irida Shallari, Marco Carratù, Valter Laino, and Consolatina Liguori. 2024. "Design and Characterization of a Powered Wheelchair Autonomous Guidance System" Sensors 24, no. 5: 1581. https://doi.org/10.3390/s24051581
APA StyleGallo, V., Shallari, I., Carratù, M., Laino, V., & Liguori, C. (2024). Design and Characterization of a Powered Wheelchair Autonomous Guidance System. Sensors, 24(5), 1581. https://doi.org/10.3390/s24051581