
Innovative Non-Invasive and Non-Intrusive Precision Thermometry in Stainless-Steel Tanks Using Ultrasound Transducers

 , , ,
, , ,  and
and 
Abstract
1. Introduction
- The paper proposes an innovative technique based on ultrasonic measurements for non-invasive and non-intrusive thermometry. This method offers an alternative to traditional invasive approaches and provides more accurate and instantaneous measurements.
- It presents a methodology for obtaining a temperature measurement polynomial adapted to industrial setups via a detailed calibration procedure.
- The experimental results presented in the paper demonstrate the accuracy of the developed ultrasonic-based technique. This highlights its potential in improving measurement precision in complex reactor environments.
- By integrating ultrasonic sensors within the reactor setup, the proposed method allows for the continuous and non-invasive/non-intrusive monitoring of temperature across a wide temperature range in a stainless-steel reactor.
- The paper shares valuable lessons learned from the experimental setup, including important considerations such as sensor placement, signal processing techniques, and system calibration.
2. Materials and Methods
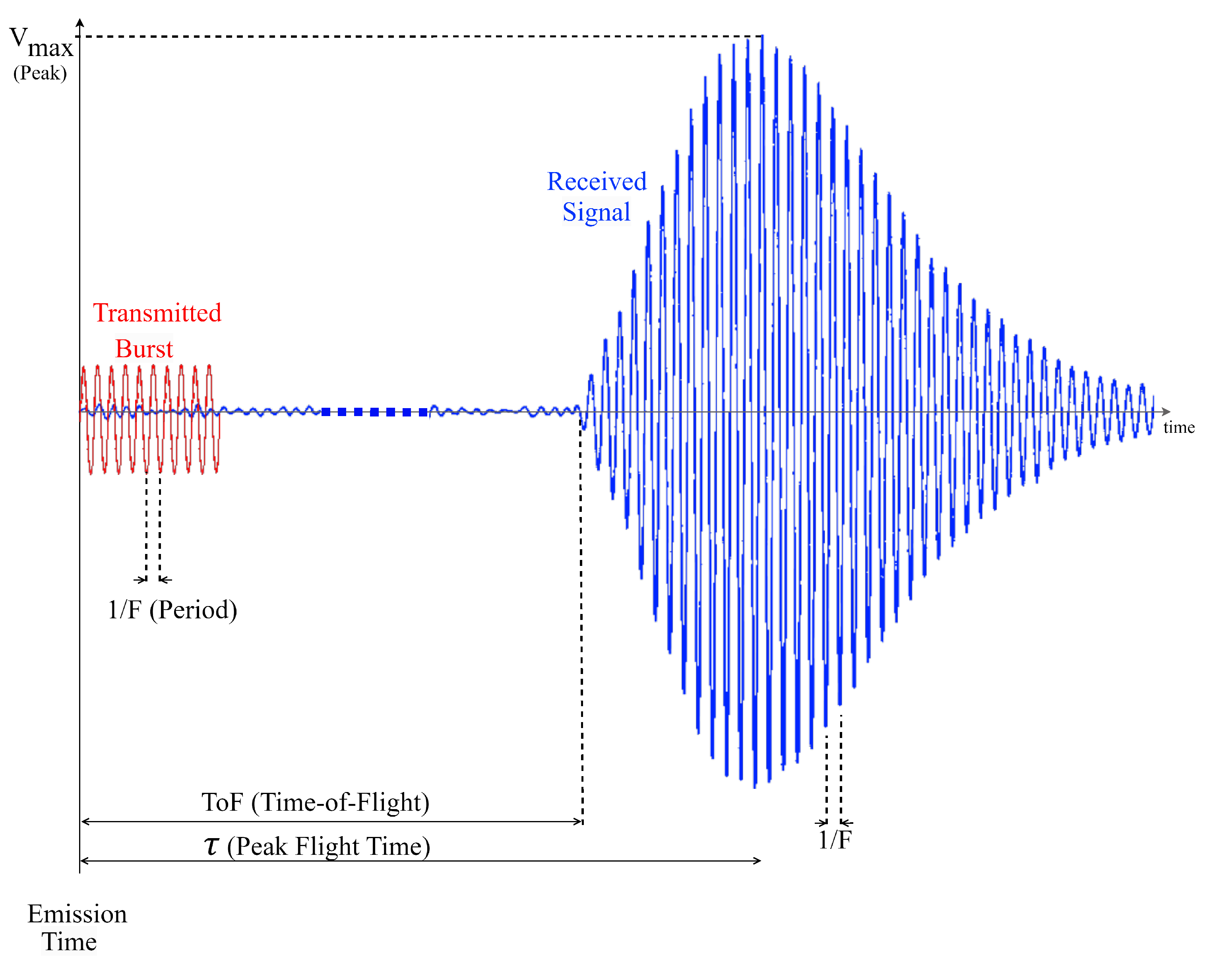
2.1. Acoustic Time-of-Flight and Peak Flight Time Measurement Principles
2.2. Signal Generation and Processing
2.2.1. Ultrasonic Transducers and Working Frequency
2.2.2. Ultrasound Driver and Receiver
2.2.3. Field Programmable Analog Array (FPAA)
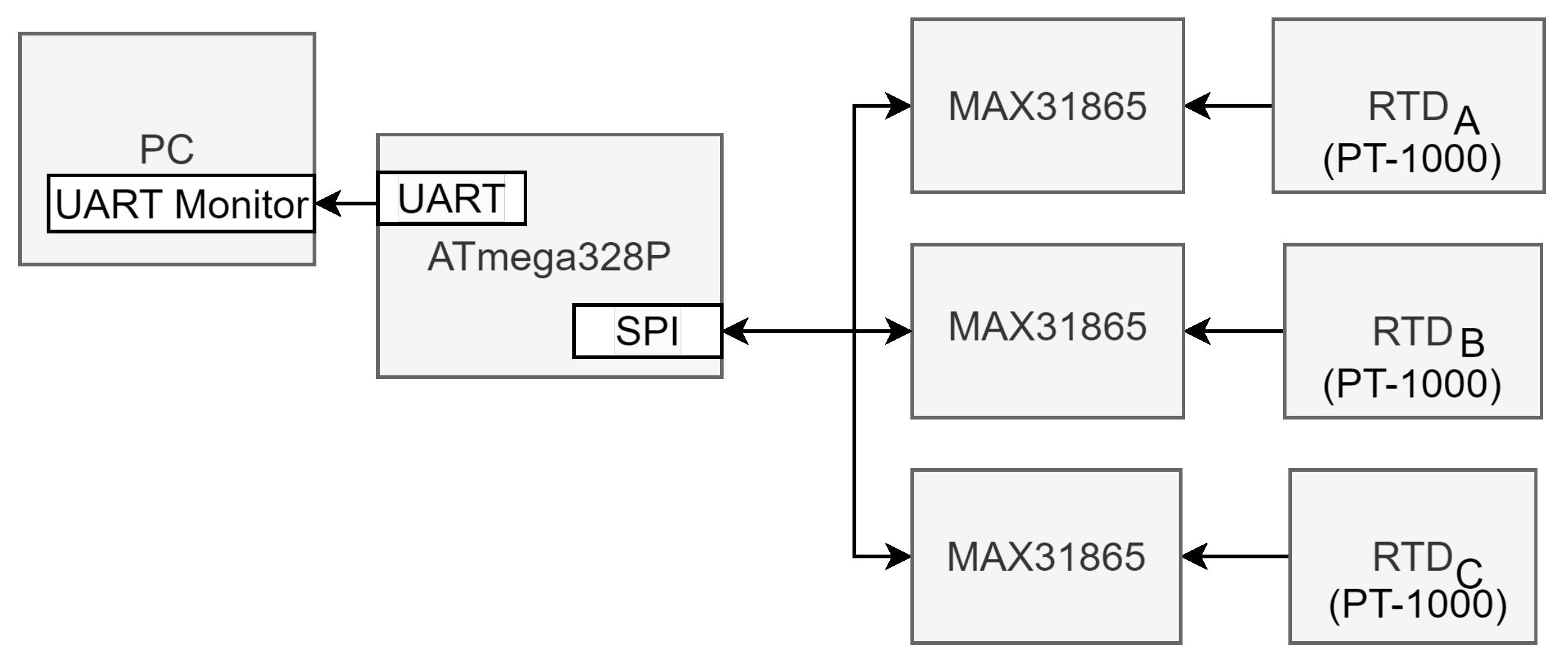
2.3. Reference Temperature Measurement System
2.4. The Proposed Temperature Measurement Method
- Define the Constants: The temperature measurement methodology requires the definition of key constants. These constants include the buffer size of the ADC of Analog Discovery 2, the frequency of the transmitted signal, the sampling frequency, and the number of bursts transmitted per temperature setpoint.
- Calibration: The calibration process of the method mainly consists of determining the polynomial constants that establish the relationship between the PFT () and temperature (T), represented as . Within the calibration phase, the methodology capitalizes on the assumption that the rising time of an A-Scan remains invariant with respect to temperature variations (which was experimentally verified) but specific to the setup. The calibration process has multiple steps, starting with the measurement of a reference temperature () for the water performed by a reference measurement system. The calibration procedure is followed by the transmission and reception of ten bursts of ten sinusoids each, all characterized by predefined parameters. The approach to extract (the time at which the signal reaches its maximum) is restricted to the detection of the same peak as the previous measurement. Experiments have shown the potential for misalignment in peak detection, resulting in temperature bias, and this approach serves to minimize divergence. Note that this technique operates under the condition that the temperature of the process does not increase by more than 3 °C per sample period, which demonstrates the rapidity of the method. On the contrary, exceeding this condition is hardly conceivable in real-life scenarios. The final step of the calibration process involves determining the coefficients of the polynomial that best fit the measured PFTs () with the reference temperatures. Note that this calibration procedure is only performed when there is a change in the setup: such as changing reactors, transducers, or attachment materials.
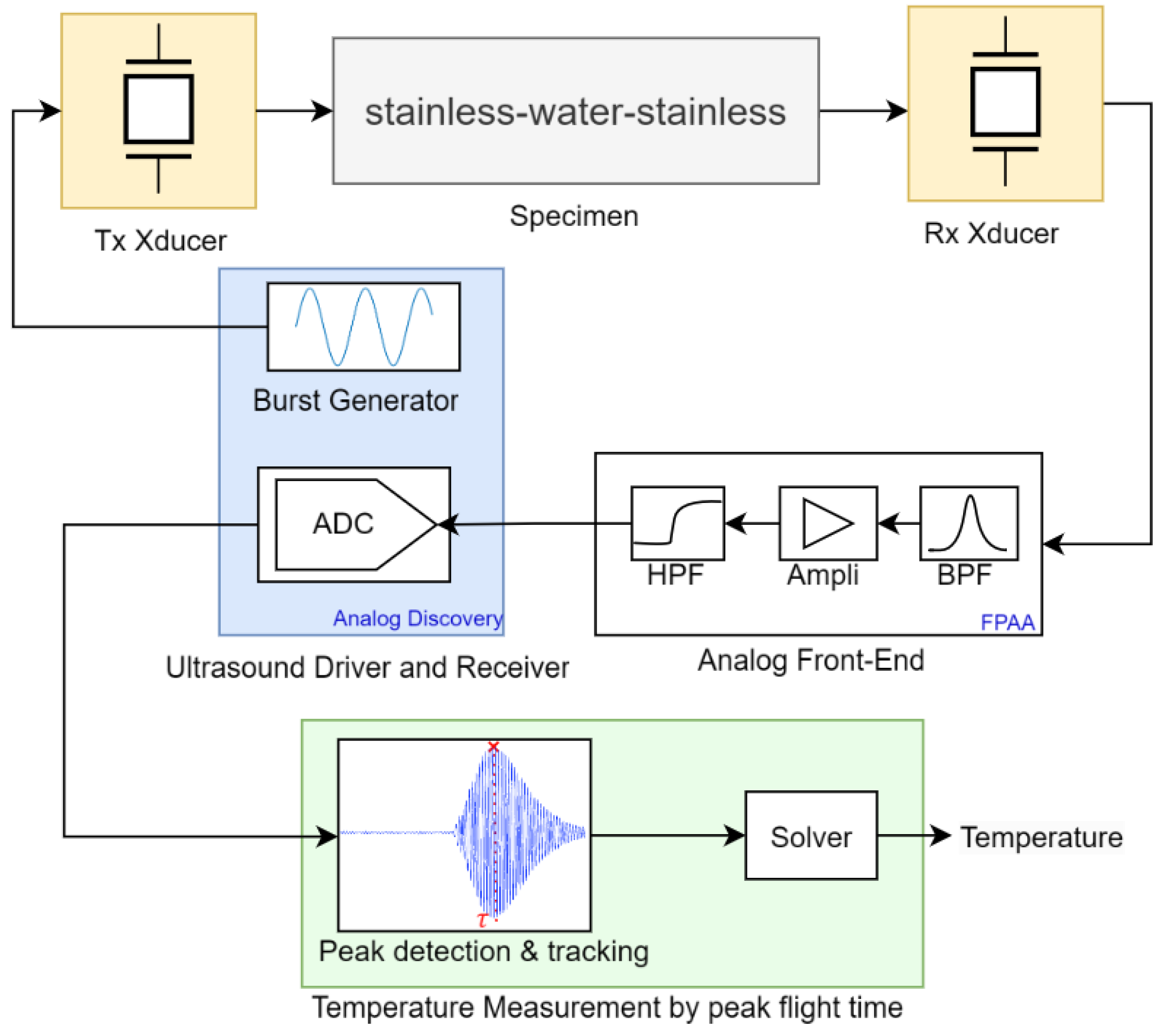
- Temperature Measurement Procedure: The temperature measurement involves transmitting and receiving bursts, measuring , and then calculating the temperature by solving the polynomial equation defined using the coefficients obtained during the calibration process. Figure 5 summarizes the temperature measurement method using the PFT technique.
3. Experimental Methodology
3.1. Calibration of RTD Sensors
- Filling a container with crushed ice.
- Adding water to the container until it reaches approximately 1 centimeter below the top of the ice.
- Immersing the RTD sensors in the middle of the container.
- Stirring the ice bath for one minute to ensure temperature uniformity.
- Measuring the resistance of the RTDs.
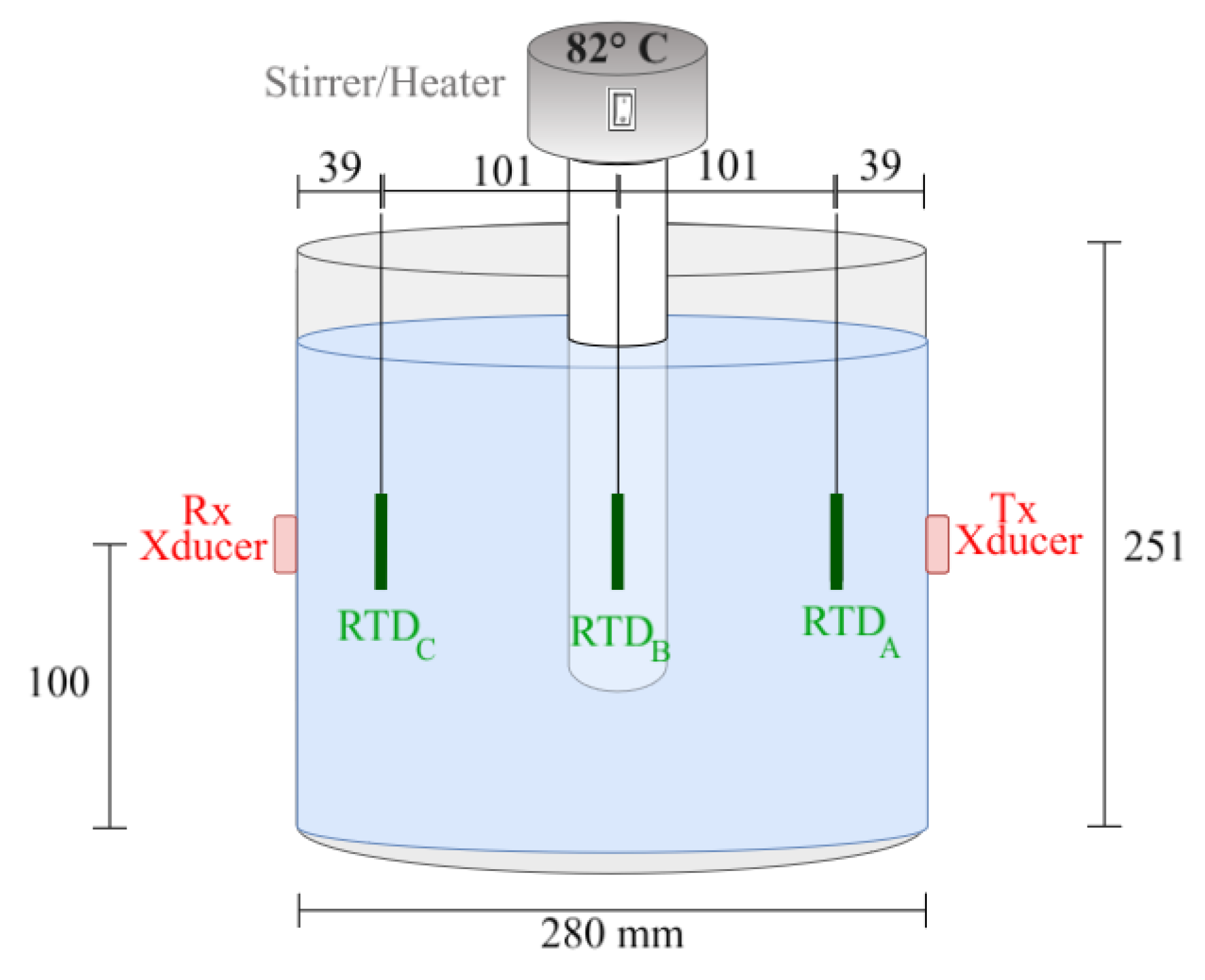
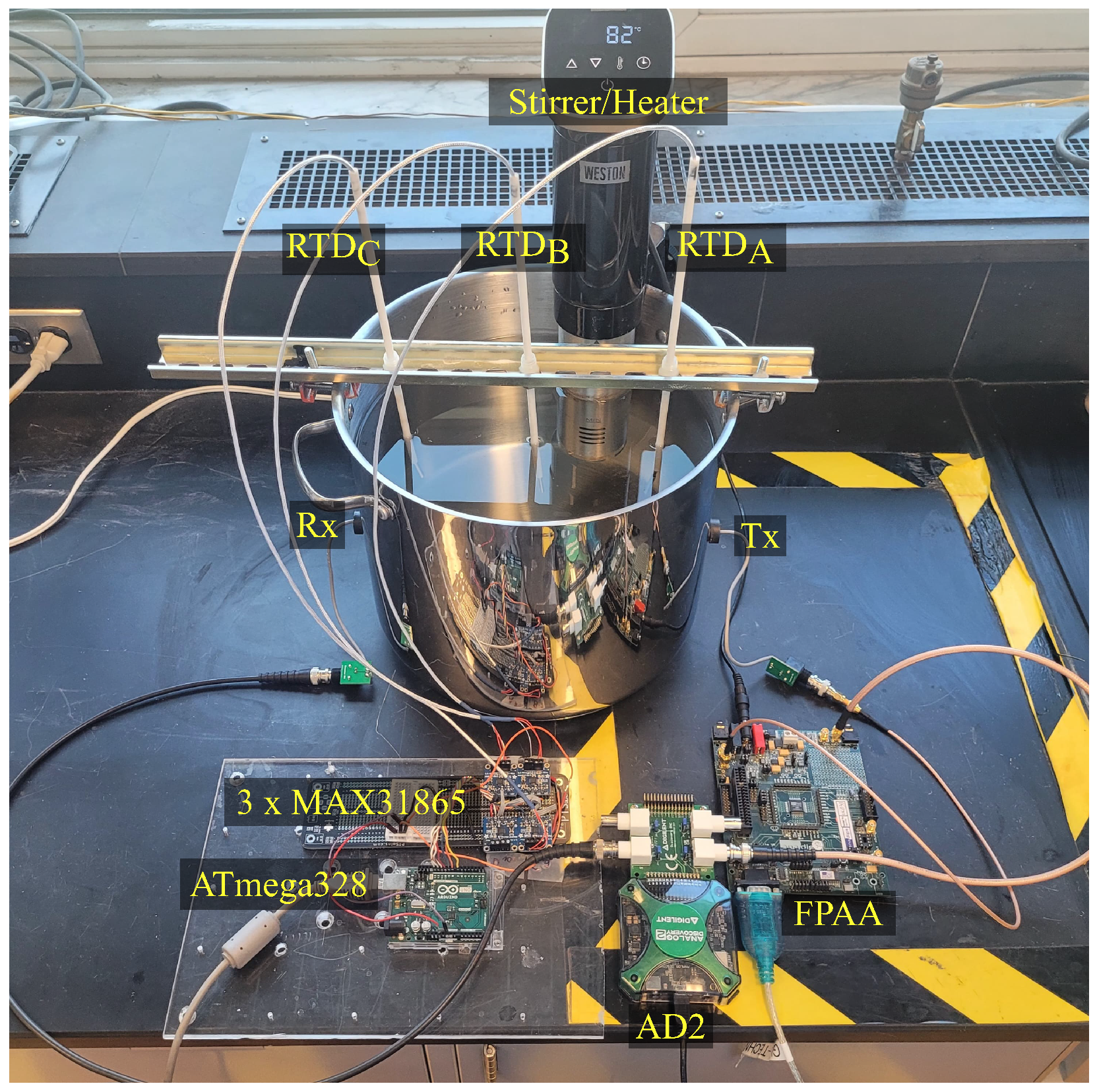
3.2. Experimental Setup
3.3. Experimental Protocol
- (i)
- Setting the temperature setpoint to initiate the experiment within the predefined temperature range of 28.8 to 83.8 °C.
- (ii)
- Activating the stirrer/heater to initiate the homogenization of the water temperature and the controlled heating process.
- (iii)
- Removing air bubbles accumulating on the walls of the reactor and the RTD sensors to eliminate potential acoustic reflections, attenuation, and scattering.
- (iv)
- Temperature stabilization to wait until reaching the setpoint temperature.
- (v)
- Transmitting and receiving ultrasound signals: Ten bursts of ultrasound signals were generated by the AD2 and transmitted by the Tx Xducer (transducer) and then received by an Rx transducer. The choice of using 10 bursts in series is based on the fact that at around 73.2 °C (the point where the wave velocity is maximum according to our setup), there is a high probability of temperature divergence in the calculated values. Therefore, increasing the number of bursts helps to better identify the temperature that converges most accurately.
- (vi)
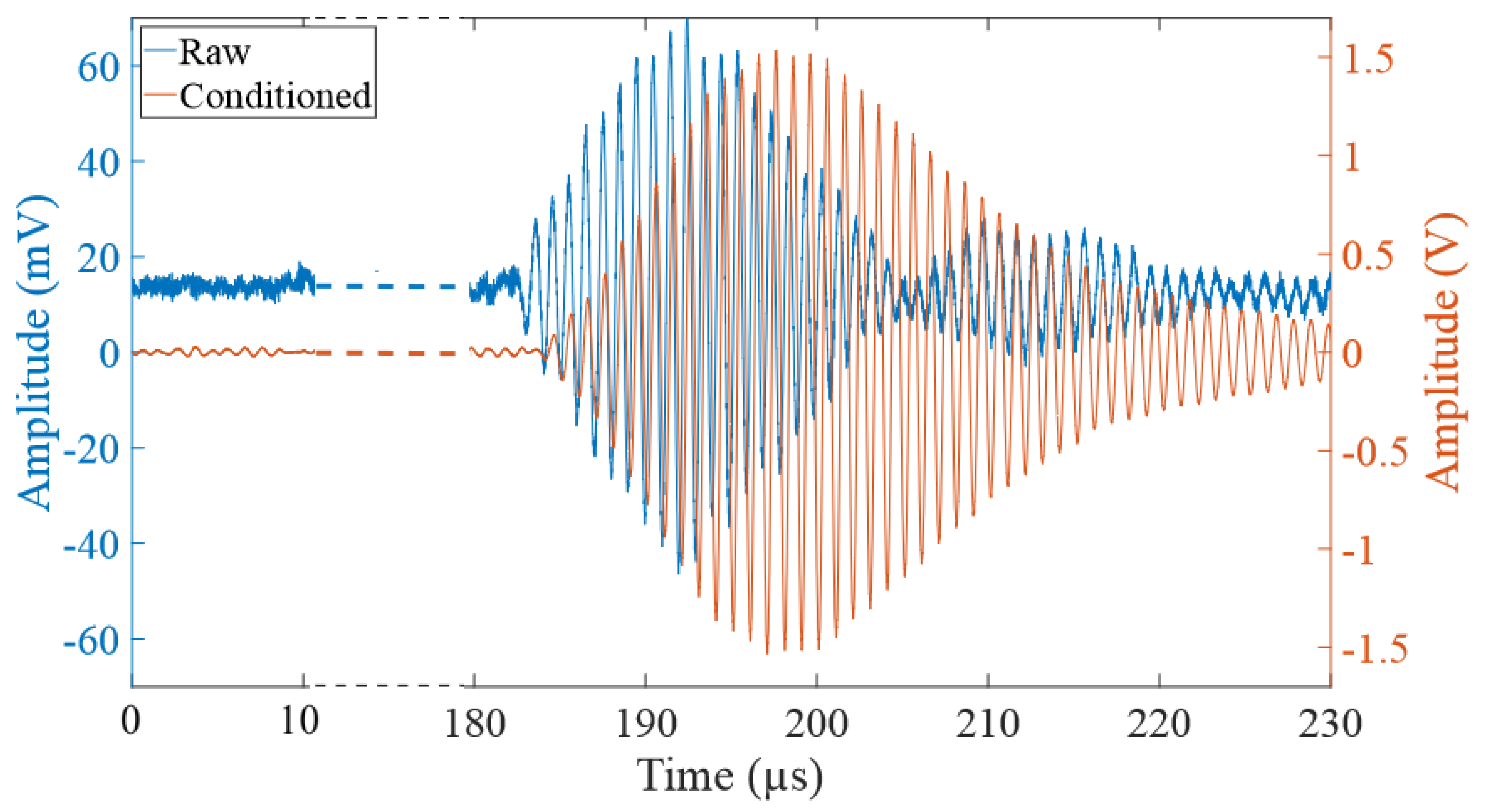
- Data acquisition: signals are then conditioned by the AFE and acquired by the AD2.
- (vii)
- Cycle continuation: returning to Step (i) to initiate a new cycle and ensure a continuous data acquisition process.
4. Results and Discussion
4.1. Ultrasound PFT Measurement
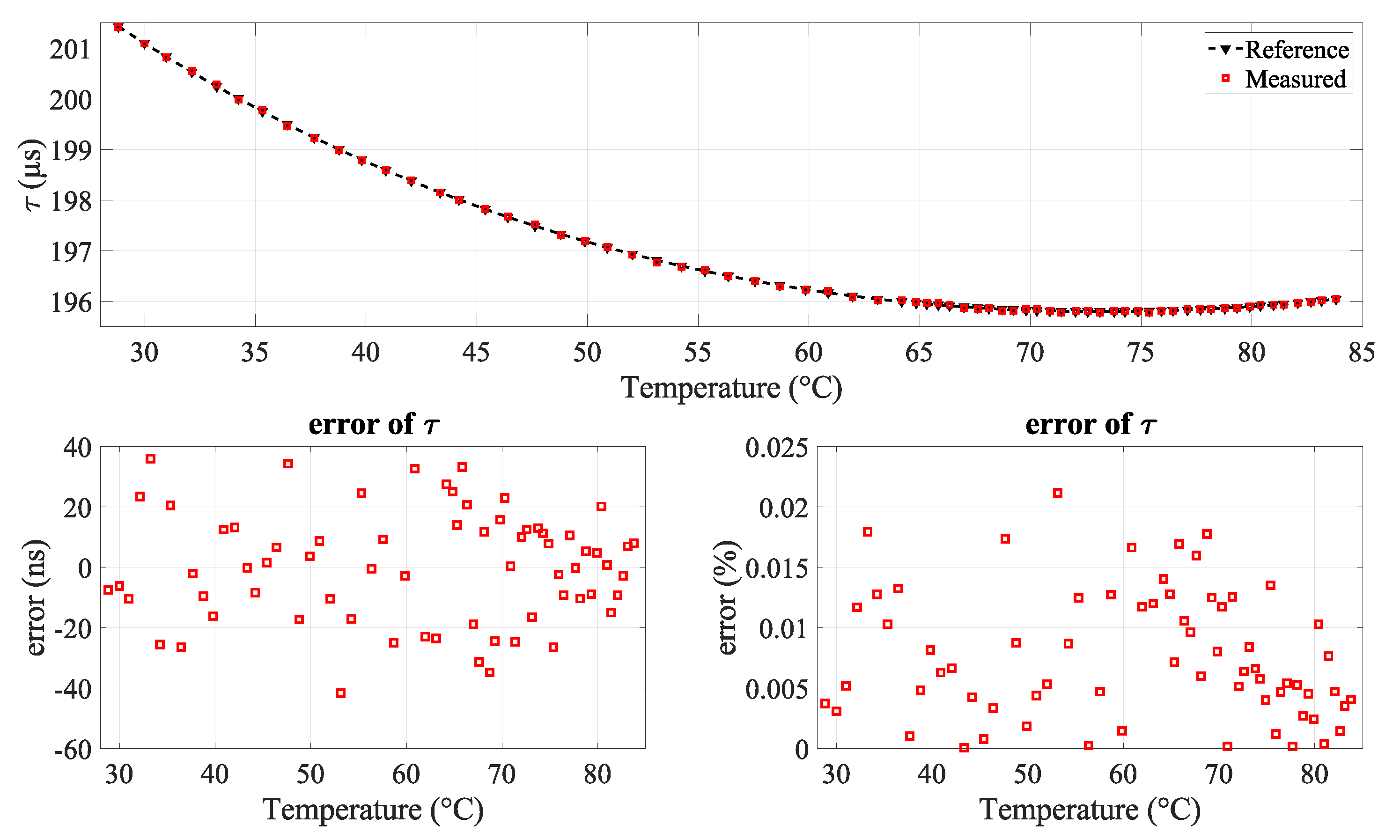
4.2. Temperature Measurement from PFT Method
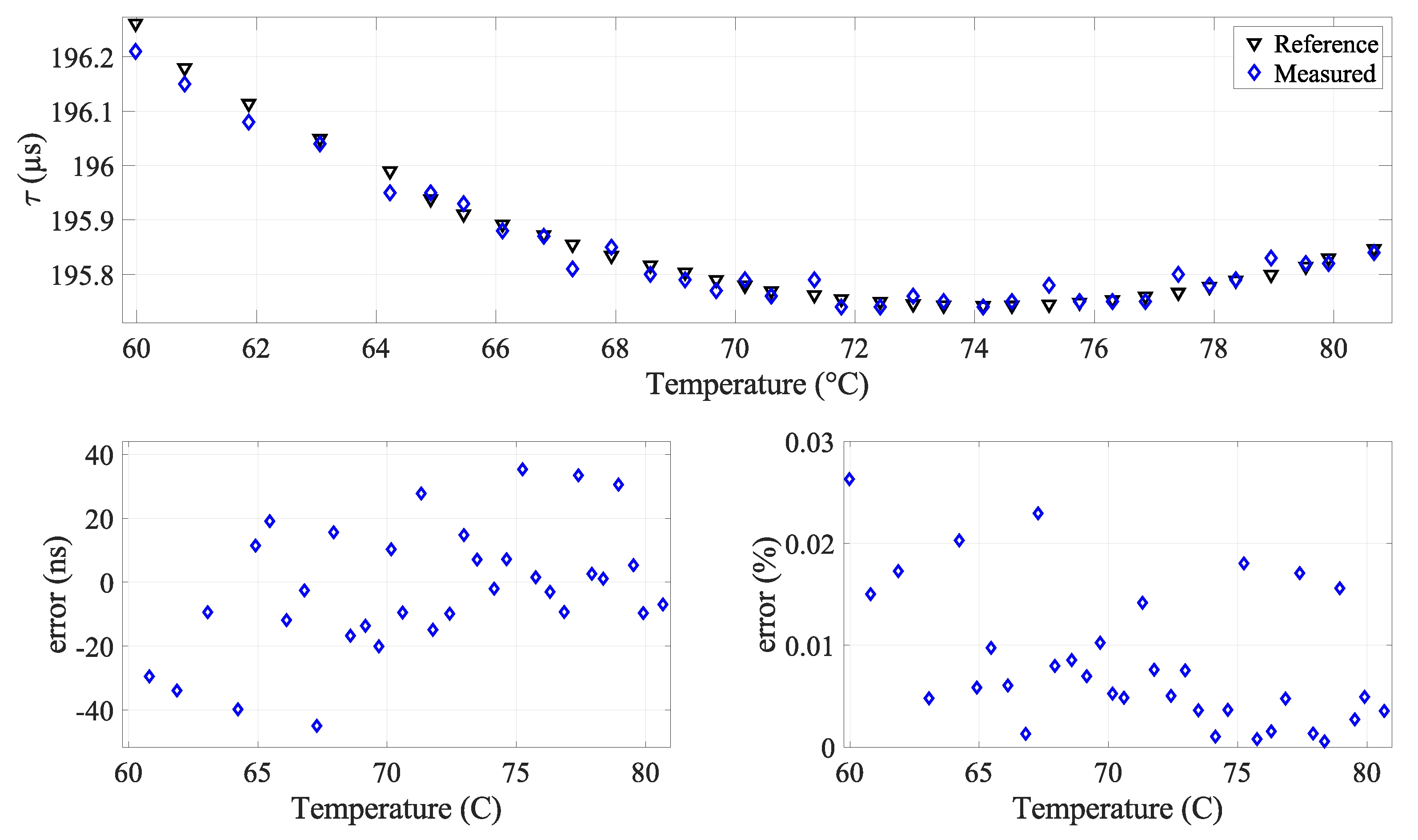
4.3. Refined-Technique Findings
4.4. Validation Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 2D | Two-Dimensional |
| ADC | Analog-to-Digital Converter |
| AFE | Analog Front-End |
| BPF | Band-Pass Filter |
| FPAA | Field Programmable Analog Array |
| HPF | High-Pass Filter |
| MSPS | Mega Samples Per Second |
| MRI | Magnetic Resonance Imaging |
| PC | Personal Computer |
| PCB | Printed Circuit Board |
| PFT | Peak Flight Time |
| RTD | Resistance Temperature Detector |
| SNR | Signal-to-Noise Ratio |
| SPI | Serial Peripheral Interface |
| ToF | Time of Flight |
| UART | Universal Asynchronous Receiver-Transmitter |
| Vpp | Peak-to-Peak Voltage |
| Xducer | Transducer |
References
- Dutz, F.J.; Heinrich, A.; Bank, R.; Koch, A.W.; Roths, J. Fiber-optic multipoint sensor system with low drift for the long-term monitoring of high-temperature distributions in chemical reactors. Sensors 2019, 19, 5476. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Zhang, D.; Wang, X.; Kong, Z.; Shao, Y.; Jin, B. Thermal condition monitoring in a chemical looping combustion reactor for real-time operation diagnosis. Appl. Therm. Eng. 2019, 162, 114122. [Google Scholar] [CrossRef]
- García, A.; Toral, V.; Márquez, Á.; García, A.; Castillo, E.; Parrilla, L.; Morales, D.P. Non-intrusive tank-filling sensor based on sound resonance. Electronics 2018, 7, 378. [Google Scholar] [CrossRef]
- Wahab, Y.A.; Rahim, R.A.; Rahiman, M.H.F.; Aw, S.R.; Yunus, F.R.M.; Goh, C.L.; Rahim, H.A.; Ling, L.P. Non-invasive process tomography in chemical mixtures—A review. Sens. Actuators B Chem. 2015, 210, 602–617. [Google Scholar] [CrossRef]
- Aloyan, G.; Kovalenko, N.; Grishchenko, I.; Konyashkin, A.; Ryabushkin, O. Acoustic resonance spectroscopy of piezoelectric crystals under non-uniform heating. Acoust. Phys. 2022, 68, 427–434. [Google Scholar] [CrossRef]
- Dukhin, A.S.; Goetz, P.J. Bulk viscosity and compressibility measurement using acoustic spectroscopy. J. Chem. Phys. 2009, 130, 124519. [Google Scholar] [CrossRef] [PubMed]
- Holmes, M.; Parker, N.; Povey, M. Temperature dependence of bulk viscosity in water using acoustic spectroscopy. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2011; Volume 269, p. 012011. [Google Scholar]
- Bagavathiappan, S.; Lahiri, B.B.; Saravanan, T.; Philip, J.; Jayakumar, T. Infrared thermography for condition monitoring—A review. Infrared Phys. Technol. 2013, 60, 35–55. [Google Scholar] [CrossRef]
- Liang, H.; Wang, J.; Zhang, L.; Liu, J.; Wang, S. Review of optical fiber sensors for temperature, salinity, and pressure sensing and measurement in seawater. Sensors 2022, 22, 5363. [Google Scholar] [CrossRef] [PubMed]
- Yapa, S.D.; D’Atri, J.L.; Schoech, J.M.; Elkins, C.J.; Eaton, J.K. Comparison of magnetic resonance concentration measurements in water to temperature measurements in compressible air flows. Exp. Fluids 2014, 55, 1834. [Google Scholar] [CrossRef]
- Pogány, A.; Wagner, S.; Werhahn, O.; Ebert, V. Development and metrological characterization of a tunable diode laser absorption spectroscopy (TDLAS) spectrometer for simultaneous absolute measurement of carbon dioxide and water vapor. Appl. Spectrosc. 2015, 69, 257–268. [Google Scholar] [CrossRef]
- Errigo, M.; Windows-Yule, C.; Materazzi, M.; Werner, D.; Lettieri, P. Non-invasive and non-intrusive diagnostic techniques for gas-solid fluidized beds—A review. Powder Technol. 2023, 431, 119098. [Google Scholar] [CrossRef]
- Choe, J.H.; Lee, K.S.; Choy, I.; Cho, W. Ultrasonic Distance Measurement Method by Using the Envelope Model of Received Signal Based on System Dynamic Model of Ultrasonic Transducers. J. Electr. Eng. Technol. 2018, 13, 981–988. [Google Scholar]
- Eckert, S.; Gerbeth, G.; Melnikov, V. Velocity measurements at high temperatures by ultrasound Doppler velocimetry using an acoustic wave guide. Exp. Fluids 2003, 35, 381–388. [Google Scholar] [CrossRef]
- Sahoo, A.K.; Udgata, S.K. A novel ANN-based adaptive ultrasonic measurement system for accurate water level monitoring. IEEE Trans. Instrum. Meas. 2019, 69, 3359–3369. [Google Scholar] [CrossRef]
- Kokuryo, D.; Kumamoto, E.; Kuroda, K. Recent technological advancements in thermometry. Adv. Drug Deliv. Rev. 2020, 163, 19–39. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Qu, M.; Huang, Y.; Zheng, Z.; Cui, P.; Liu, H.; Xie, J. Noninvasive measurement of temperature for simulated tissue based on piezoelectric micromachined ultrasonic transducers. J. Micromech. Microeng. 2023, 33, 065001. [Google Scholar] [CrossRef]
- Byra, M.; Klimonda, Z.; Kruglenko, E.; Gambin, B. Unsupervised deep learning based approach to temperature monitoring in focused ultrasound treatment. Ultrasonics 2022, 122, 106689. [Google Scholar] [CrossRef]
- Wang, H.; Zhou, X.; Yang, Q.; Chen, J.; Dong, C.; Zhao, L. A reconstruction method of boiler furnace temperature distribution based on acoustic measurement. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Kong, Q.; Jiang, G.; Liu, Y.; Sun, J. 3D high-quality temperature-field reconstruction method in furnace based on acoustic tomography. Appl. Therm. Eng. 2020, 179, 115693. [Google Scholar] [CrossRef]
- Zhong, Q.; Chen, Y.; Zhu, B.; Liao, S.; Shi, K. A temperature field reconstruction method based on acoustic thermometry. Measurement 2022, 200, 111642. [Google Scholar] [CrossRef]
- Liu, Q.; Zhou, B.; Zhang, J.; Cheng, R.; Dai, M.; Zhao, X.; Wang, Y. A novel time-of-flight estimation method of acoustic signals for temperature and velocity measurement of gas medium. Exp. Therm. Fluid Sci. 2023, 140, 110759. [Google Scholar] [CrossRef]
- Schwarz, M.; Zagar, B.G. Ultrasonic measurement and methods for reconstruction of temperature fields for the use in bioreactors. Tm-Tech. Mess. 2022, 89, 556–565. [Google Scholar] [CrossRef]
- Lenner, M.; Kassubek, F.; Bernhard, C.; Yang, L.; Pape, D. Single-Element Ultrasonic Transducer for Non-Invasive Measurements. IEEE Sens. J. 2019, 20, 4080–4086. [Google Scholar] [CrossRef]
- Afaneh, A.; Alzebda, S.; Ivchenko, V.; Kalashnikov, A. Ultrasonic measurements of temperature in aqueous solutions: Why and how. Phys. Res. Int. 2011, 2011, 156396. [Google Scholar] [CrossRef]
- Zaz, G.; Calzavara, Y.; Le Clézio, E.; Despaux, G. Adaptation of a high frequency ultrasonic transducer to the measurement of water temperature in a nuclear reactor. Phys. Procedia 2015, 70, 195–198. [Google Scholar] [CrossRef]
- Lubbers, J.; Graaff, R. A simple and accurate formula for the sound velocity in water. Ultrasound Med. Biol. 1998, 24, 1065–1068. [Google Scholar] [CrossRef] [PubMed]
- Del Grosso, V.; Mader, C. Speed of sound in pure water. J. Acoust. Soc. Am. 1972, 52, 1442–1446. [Google Scholar] [CrossRef]
- Greenspan, M.; Tschiegg, C.E. Tables of the speed of sound in water. J. Acoust. Soc. Am. 1959, 31, 75–76. [Google Scholar] [CrossRef]
- Wilson, W.D. Speed of sound in distilled water as a function of temperature and pressure. J. Acoust. Soc. Am. 1959, 31, 1067–1072. [Google Scholar] [CrossRef]
- Wong, G.S.; Zhu, S.M. Speed of sound in seawater as a function of salinity, temperature, and pressure. J. Acoust. Soc. Am. 1995, 97, 1732–1736. [Google Scholar] [CrossRef]
- Yu, Y.; Xiong, Q.; Ye, Z.S.; Liu, X.; Li, Q.; Wang, K. A review on acoustic reconstruction of temperature profiles: From time measurement to reconstruction algorithm. IEEE Trans. Instrum. Meas. 2022, 71, 1–24. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Standard Deviation (mm/s) | ||||||
|---|---|---|---|---|---|---|---|
| Greenspan and Tschiegg [29] | 26.3 | ||||||
| Wilson [30] | 0 | 160 | |||||
| Del Grosso and Mader [28] | 2.8 |
| Specification | Value |
|---|---|
| Manufacturer | UNICTRON |
| Model | H2KMPYA1000600 |
| Frequency | 1.007 MHz * |
| Beam Angle | |
| Applied Voltage | 10 Vpp (Maximum 50 Vpp) |
| Minimal Sensitivity | −28 dB |
| Diameter | 20.2 mm |
| Thickness | 9.7 mm |
| Housing Material | Polyphenylene Sulfide |
| Sealing Material | Polyurethane |
| Attachment Method | Ethyl 2-cyanoacrylate Glue |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bouzid, A.; Chidami, S.; Lailler, T.Q.; García, A.C.; Ould-Bachir, T.; Chaouki, J. Innovative Non-Invasive and Non-Intrusive Precision Thermometry in Stainless-Steel Tanks Using Ultrasound Transducers. Sensors 2024, 24, 3404. https://doi.org/10.3390/s24113404
Bouzid A, Chidami S, Lailler TQ, García AC, Ould-Bachir T, Chaouki J. Innovative Non-Invasive and Non-Intrusive Precision Thermometry in Stainless-Steel Tanks Using Ultrasound Transducers. Sensors. 2024; 24(11):3404. https://doi.org/10.3390/s24113404
Chicago/Turabian StyleBouzid, Ahmed, Saad Chidami, Tristan Quentin Lailler, Adrián Carrillo García, Tarek Ould-Bachir, and Jamal Chaouki. 2024. "Innovative Non-Invasive and Non-Intrusive Precision Thermometry in Stainless-Steel Tanks Using Ultrasound Transducers" Sensors 24, no. 11: 3404. https://doi.org/10.3390/s24113404
APA StyleBouzid, A., Chidami, S., Lailler, T. Q., García, A. C., Ould-Bachir, T., & Chaouki, J. (2024). Innovative Non-Invasive and Non-Intrusive Precision Thermometry in Stainless-Steel Tanks Using Ultrasound Transducers. Sensors, 24(11), 3404. https://doi.org/10.3390/s24113404