
Decision-Making Algorithm with Geographic Mobility for Cognitive Radio

 , ,
, , 
Abstract
1. Introduction
- Proposing a detailed analysis of decision-making that considers geographic mobility (GM), a parameter that most CRN proposals have not yet explored in depth
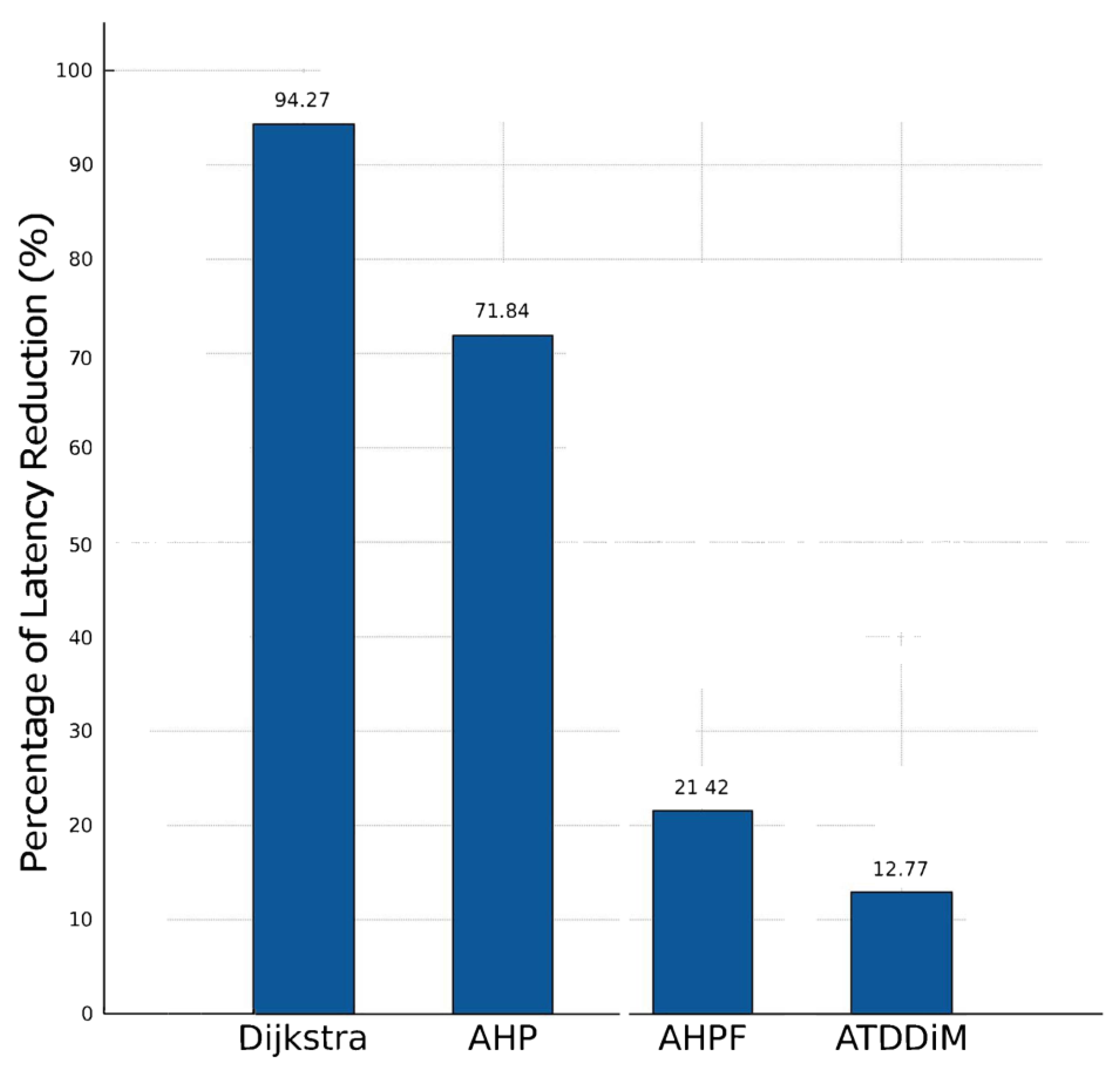
- Developing a robust process that reduces latency to find a better communication channel; and
- Providing a feedback function that increases the precision in the selection of a better communication backup channel, based on historical data regarding network behavior through a feedback process that considers information from the evaluations of previously used channels. The value assigned to each channel thus corresponds to a relationship between current information and previous evaluations.
2. Related Work
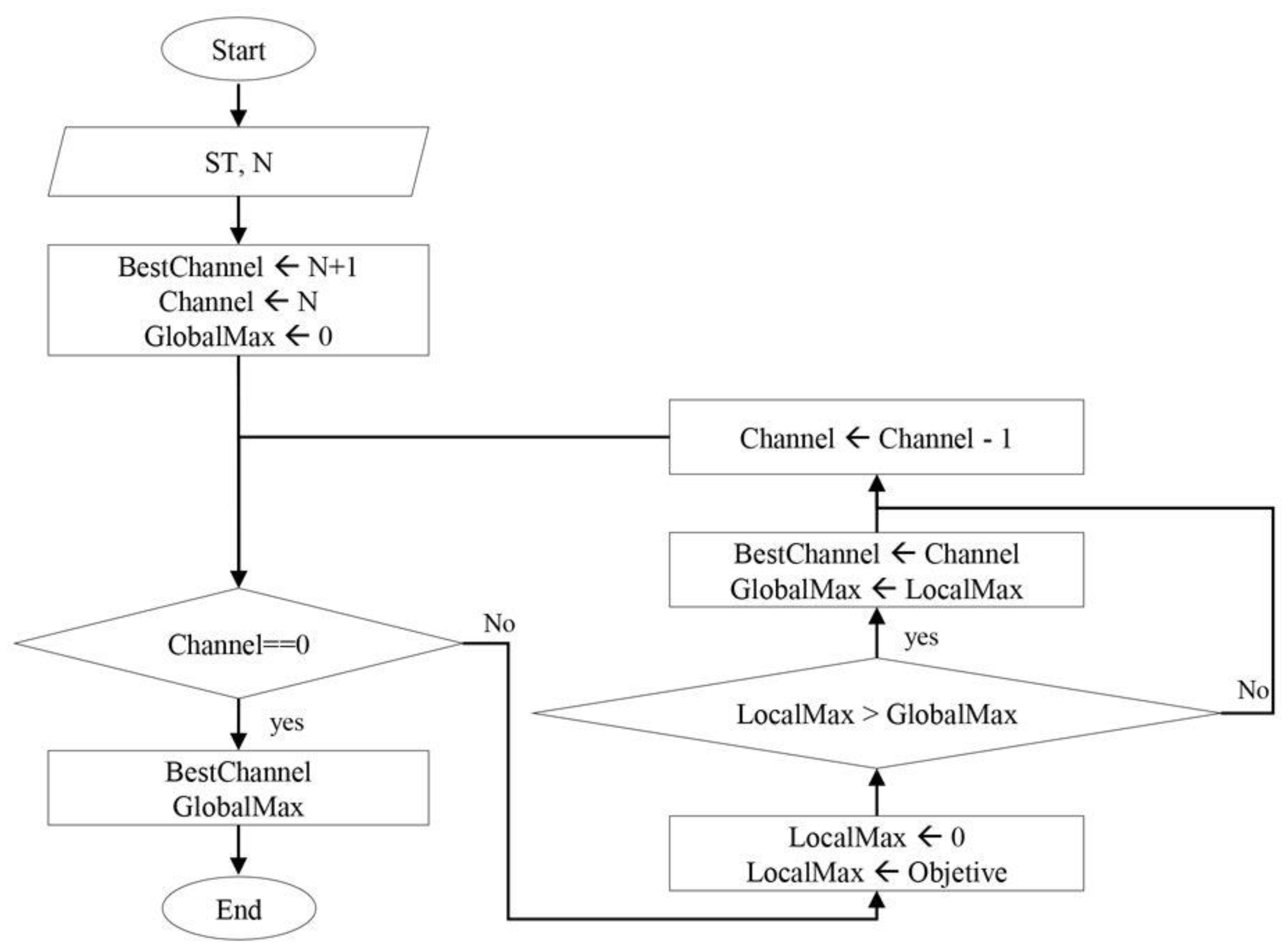
3. Decision-Making Algorithm with Geographic Mobility (DMAGM)
- i: id-number of one of the N channels to be compared
- ts: type of service (RT or BE)
- BW: normalized values of BW detected by the CR for channel i
- SINR: normalized values of SINR detected by the CR for channel i
- AP: normalized values of AP estimated by the CR for channel i
- ETA: normalized values of ETA estimated by the CR for channel i
- : assigned weight to BW depending on the selected ts
- : assigned weight to SINR depending on the selected ts
- : assigned weight to AP depending on the selected ts
- : assigned weight to ETA depending on the selected ts
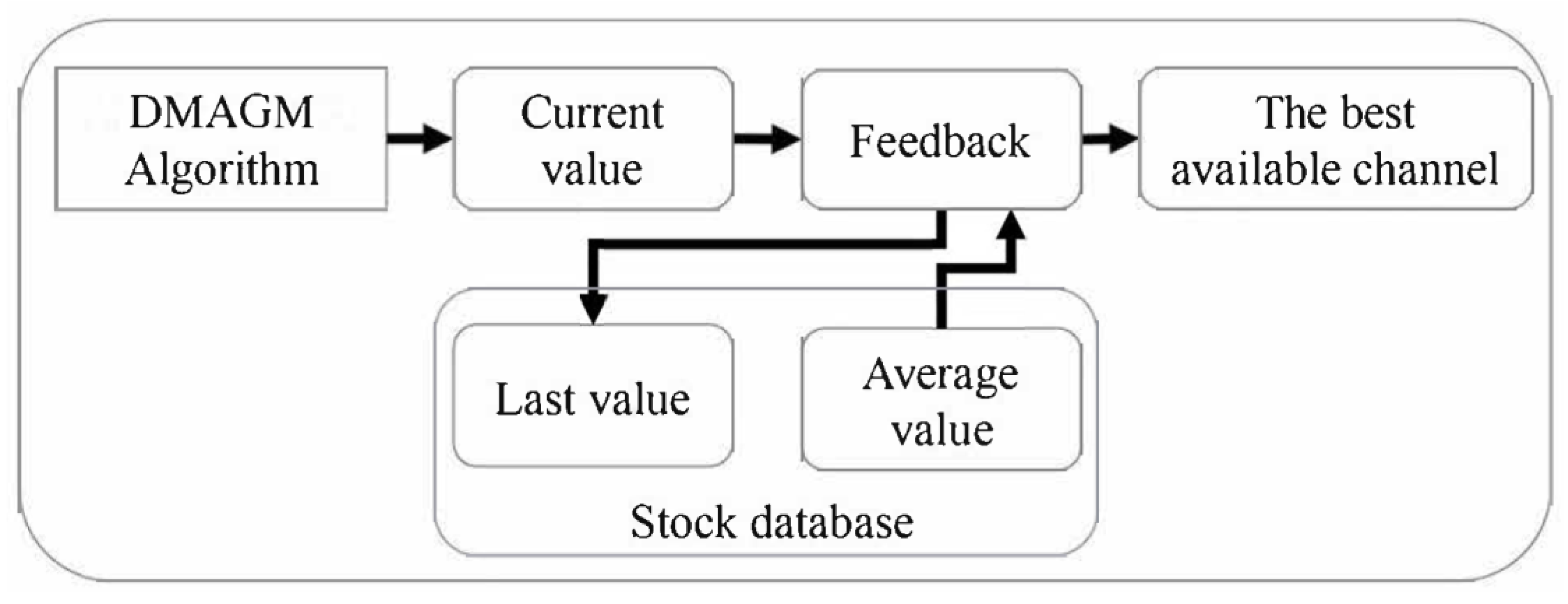
Feedback-Decision-Making Algorithm with Geographic Mobility (FDMAGM)
- i: id-number of one of the N channels to be compared
- SF: final value
- SA: current value
- SPa: previous value
- SPr: mean value
- α, β ∈ [0, 1]
4. Tests and Result Analysis
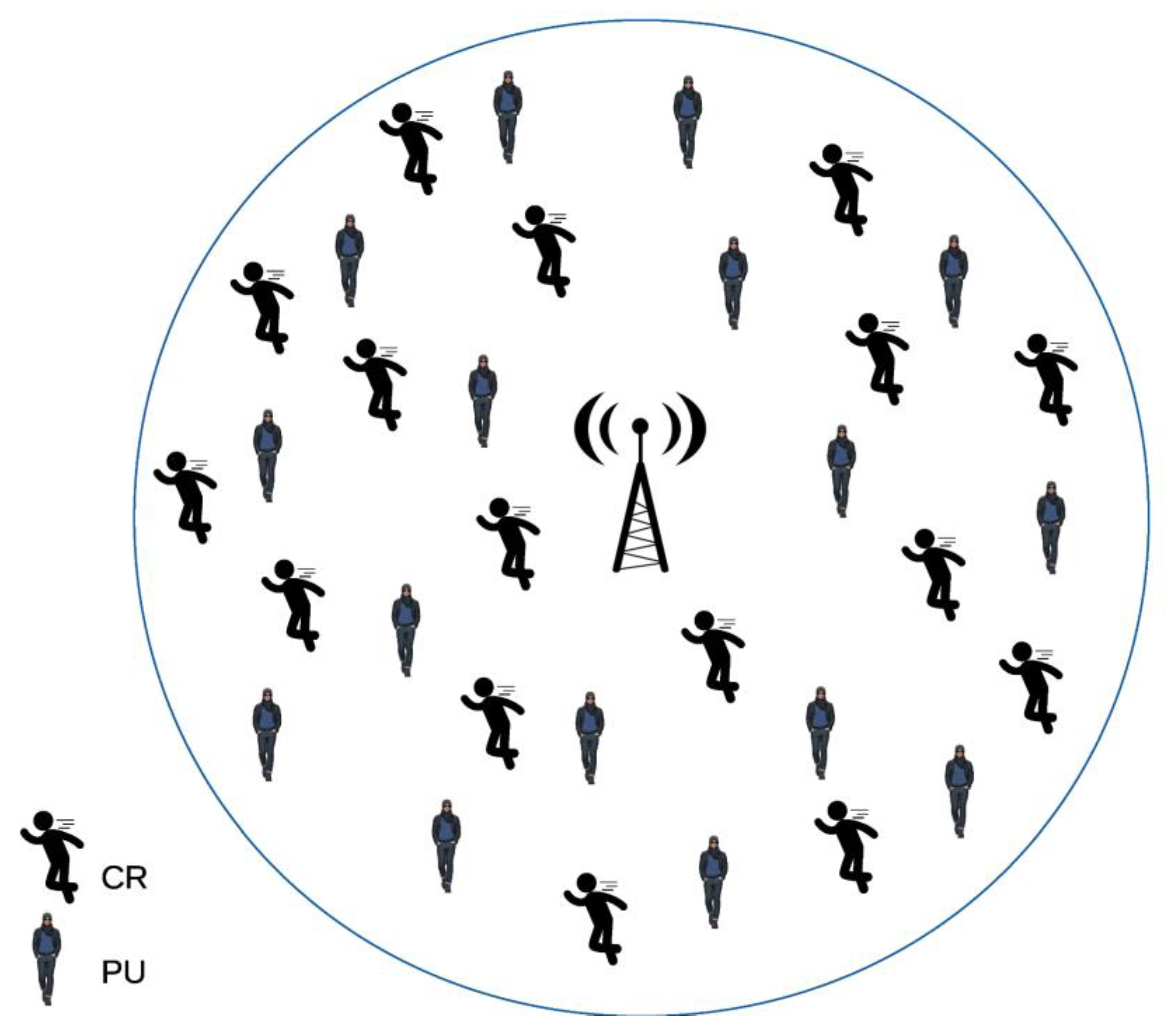
4.1. Simulation Scenario with Geographic Mobility
- Same as the BS coverage radius, i.e., 2167 m
- 50% greater than the BS coverage radius, i.e., 3250.5 m
- 100% greater than the BS coverage radius, i.e., 4334 m
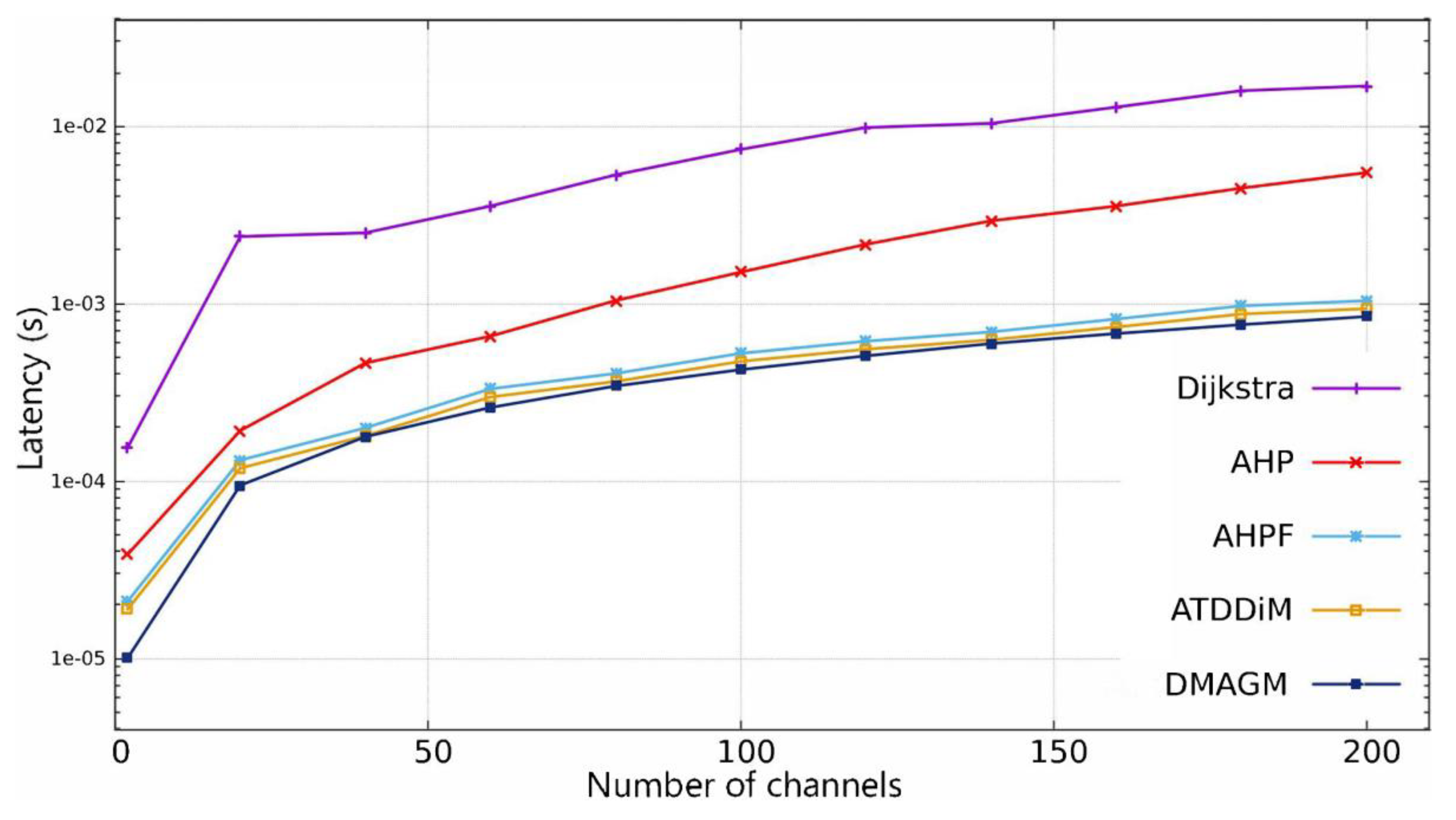
4.2. Comparison of the Decision-Making Algorithm with Geographic Mobility
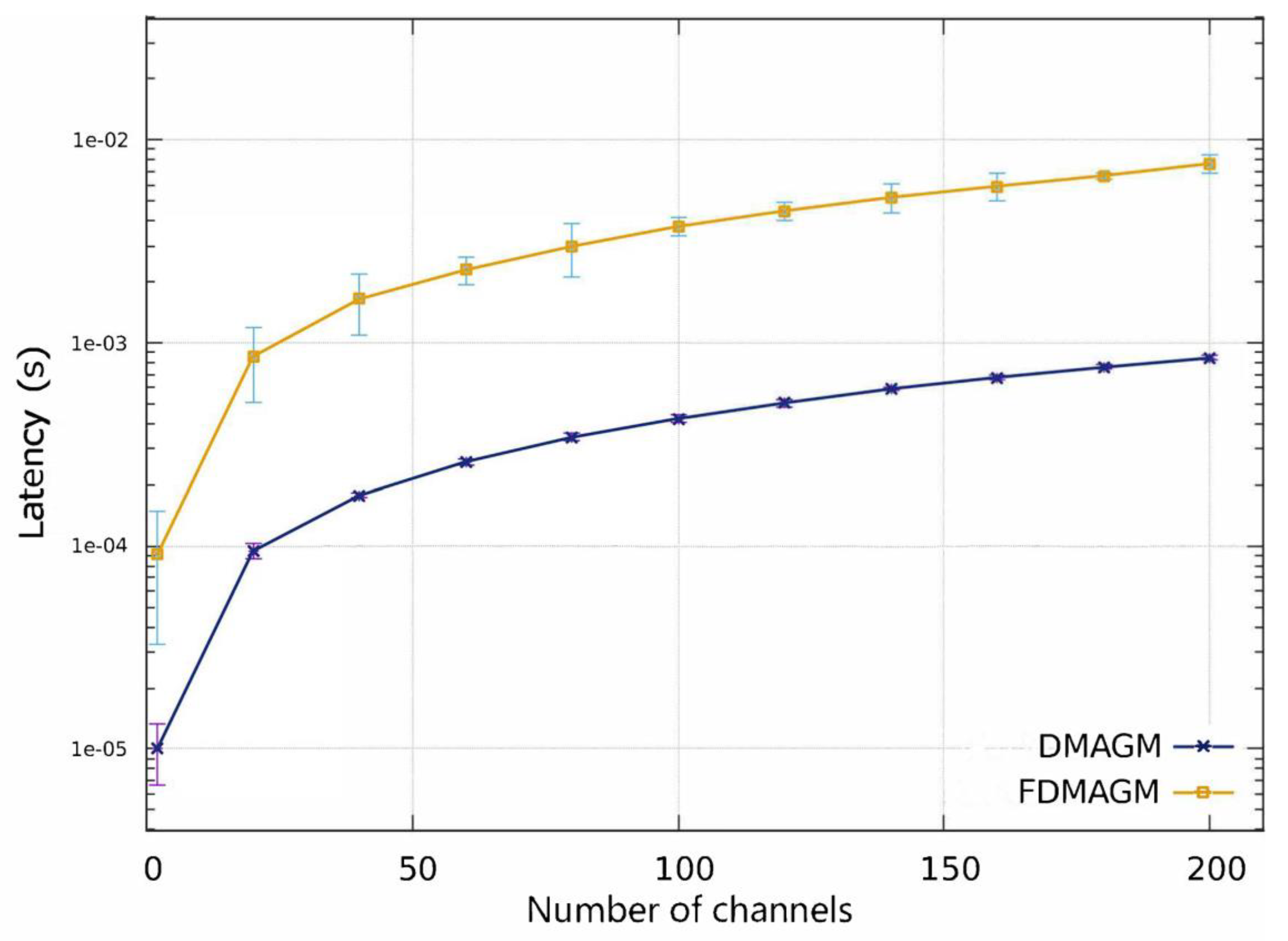
4.3. Analysis of the Feedback-Decision-Making Algorithm with Geographic Mobility
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CR | Cognitive Radio |
| CRN | Cognitive Radio Network |
| GM | Geographic Mobility |
| PU | Primary User |
| SU | Secondary User |
| BS | Base Station |
| BW | Bandwidth |
| SINR | Signal-to-Interference plus Noise Ratio |
| AP | Channel Availability Probability |
| ETA | Estimated Channel Time Availability |
| DMAGM | Decision-Making Algorithm with Geographic Mobility |
| FDMAGM | Feedback-Decision-Making Algorithm with Geographic Mobility |
| ATDDiM | Modified Dijkstra Decision-Making Algorithm |
| FAHP | Fuzzy Analytic Hierarchy Process |
| AHP | Analytic Hierarchy Process |
| RWPM | Random Way-Point Mobility Model |
| RT | Real Time |
| BE | Best Effort |
| GSM | Global System for Mobile Communications |
| NS-3 | Network Simulator-3 |
References
- Zubair, S.; Yusoff, S.S.; Fisal, N. Mobility-Enhanced Reliable Geographical Forwarding in Cognitive Radio Sensor Networks. Sensors 2016, 16, 172. [Google Scholar] [CrossRef]
- Hernandez, C.; Salgado, C.; López, H.; Rodriguez-Colina, E. Multivariable algorithm for dynamic channel selection in cognitive radio networks. EURASIP J. Wirel. Commun. Netw. 2015, 2015, 216. [Google Scholar] [CrossRef]
- Wheeb, A.H.; Nordin, R.; Samah, A.A.; Alsharif, M.H.; Khan, M.A. Topology-Based Routing Protocols and Mobility Models for Flying Ad Hoc Networks: A Contemporary Review and Future Research Directions. Drones 2021, 6, 9. [Google Scholar] [CrossRef]
- Chiang, K.-H.; Shenoy, N. A 2-D Random-Walk Mobility Model for Location-Management Studies in Wireless Networks. IEEE Trans. Veh. Technol. 2004, 53, 413–424. [Google Scholar] [CrossRef]
- Filho, J.A.; Rosário, D.; Rosário, D.; Santos, A.; Gerla, M. Satisfactory video dissemination on FANETs based on an enhanced UAV relay placement service. Ann. Telecommun. 2018, 73, 601–612. [Google Scholar] [CrossRef]
- Kumar, S.; Agrawal, G.S.; Sharma, S.K. Impact of Mobility on MANETs Routing Protocols Using Group Mobility Model. Int. J. Wirel. Microw. Technol. 2017, 7, 1–12. [Google Scholar] [CrossRef][Green Version]
- Abdullah, A.M.; Ozen, E.; Bayramoglu, H. Investigating the Impact of Mobility Models on MANET Routing Protocols. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 25–35. [Google Scholar] [CrossRef]
- Liu, X.; Du, X.; Zhang, X.; Zhu, Q.; Guizani, M. Evolution-algorithm-based unmanned aerial vehicles path planning in complex environment. Comput. Electr. Eng. 2019, 80, 106493. [Google Scholar] [CrossRef]
- Nagaraju, M.; Rao, K.R.; Vijayalakshmi, K. Efficient way of implementing the random and GM (Gauss-Markov) mobility model in MANET. Int. J. Eng. Technol. 2018, 7, 270. [Google Scholar] [CrossRef][Green Version]
- Fan, D.; Shi, P. Improvement of Dijkstra’s algorithm and its application in route planning. In Proceedings of the 2010 Seventh International Conference on Fuzzy Systems and Knowledge Discovery, Yantai, China, 10–12 August 2010; IEEE: New York City, NY, USA, 2010; pp. 1901–1904. [Google Scholar] [CrossRef]
- Uchida, N.; Takahata, K.; Zhang, X.; Takahata, K.; Shibata, Y. Min-Max Based AHP Method for Route Selection in Cognitive Wireless Network. In Proceedings of the 2010 13th International Conference on Network-Based Information Systems, Takayama, Japan, 14–16 September 2010; IEEE: New York City, NY, USA, 2010; pp. 22–27. [Google Scholar] [CrossRef]
- Hernández-Suárez, C.A.; Pedraza-Martínez, L.F.; Rodríguez-Colina, E. Fuzzy feedback algorithm for the spectral handoff in cognitive radio networks. Rev. Fac. Ing. Univ. Antioq. 2016, 81, 47–62. [Google Scholar] [CrossRef]
- Méndez-Martínez, L.; Rodriguez-Colina, E.; Medina-Ramírez, C. Toma de Decisiones Basadas en el Algoritmo de Dijkstra. Redes Ing. 2014, 4, 35. [Google Scholar] [CrossRef][Green Version]
- Trigui, E.; Esseghir, M.; Merghem-Boulahia, L. A mobility scheme for cognitive radio networks. In Proceedings of the 2013 12th Annual Mediterranean Ad Hoc Networking Workshop (MED-HOC-NET), Ajaccio, France, 24–26 June 2013; IEEE: New York City, NY, USA, 2013; pp. 97–102. [Google Scholar] [CrossRef]
- Obaid, A.; Fernando, X.; Jaseemuddin, M. A mobility-aware cluster-based MAC protocol for radio-frequency energy harvesting cognitive wireless sensor networks. IET Wirel. Sens. Syst. 2021, 11, 206–218. [Google Scholar] [CrossRef]
- Deva priya, S.; Kannan, N. Enhanced spectrum aggregation based frequency-band selection routing protocol for cognitive radio ad-hoc networks. Concurr. Comput. 2019, 31, e4911. [Google Scholar] [CrossRef]
- Zhao, Y.; Hong, Z.; Luo, Y.; Wang, G.; Pu, L. Prediction-Based Spectrum Management in Cognitive Radio Networks. IEEE Syst. J. 2018, 12, 3303–3314. [Google Scholar] [CrossRef]
- Hanif, I.; Zeeshan, M.; Ahmed, A. Traffic Pattern Based Adaptive Spectrum Handoff Strategy for Cognitive Radio Networks. In Proceedings of the 2016 10th International Conference on Next Generation Mobile Applications, Security and Technologies (NGMAST), Cardiff, UK, 24–26 August 2016; IEEE: New York City, NY, USA, 2016; pp. 18–23. [Google Scholar] [CrossRef]
- Jaffar, J.; Ksyusof, S.; Ahmad, N.; Mustapha, J. Location assisted proactive channel in heterogeneous cognitive radio network. J. Telecommun. Electron. Comput. Eng. 2016, 8, 49–53. [Google Scholar]
- Omer, A.E.; Hassan, M.S.; El-Tarhuni, M. An Adaptive Channel Assignment Approach for Streaming of Scalable Video over Cognitive Radio Networks. In Proceedings of the 2016 UKSim-AMSS 18th International Conference on Computer Modelling and Simulation (UKSim), Cambridge, UK, 6–8 April 2016; IEEE: New York City, NY, USA, 2016; pp. 305–310. [Google Scholar] [CrossRef]
- Tlouyamma, J.; Velempini, M. Channel Selection Algorithm Optimized for Improved Performance in Cognitive Radio Networks. Wirel. Pers. Commun. 2021, 119, 3161–3178. [Google Scholar] [CrossRef]
- Thakur, P.; Singh, G. Spectrum Mobility in Cognitive Radio Networks Using Spectrum Prediction and Monitoring Techniques. In Spectrum Sharing in Cognitive Radio Networks: Towards Highly Connected Environments; Wiley: Hoboken, NY, USA, 2021; pp. 147–166. [Google Scholar] [CrossRef]
- Yawada, P.S.; Dong, M.T. Intelligent Process of Spectrum Handoff/Mobility in Cognitive Radio Networks. J. Electr. Comput. Eng. 2019, 2019, 7692630. [Google Scholar] [CrossRef]
- Li, F.; Sun, Z.; Lam, K.-Y.; Sun, L.; Shen, B.; Peng, B. Dynamic Spectrum Optimization for Internet-of-Vehicles with Deep-Learning-Based Mobility Prediction. Res. Sq. 2022, 1–20. [Google Scholar] [CrossRef]
- Iftikhar, A.; Rauf, Z.; Khan, F.A.; Ali, M.S.; Kakar, M. Bayesian game-based user behavior analysis for spectrum mobility in cognitive radios. Phys. Commun. 2019, 32, 200–208. [Google Scholar] [CrossRef]
- Alozie, E.; Faruk, N. Intelligent Process of Spectrum Handoff in Cognitive Radio Network. SLU J. Sci. Technol. 2022, 4, 205–218. [Google Scholar] [CrossRef]
- Sivasundarapandian, S.; Sakthiprabha, R.; Vedanarayanan, V.; Aranganathan, A.; Gomathi, T.; Rajinikanth, E. Spectrum Reallocation Algorithm in Cognitive Radio Networks Based on Secondary User Mobility Model. In Proceedings of the 2023 International Conference on Networking and Communications (ICNWC), Chennai, India, 5–6 April 2023; IEEE: New York City, NY, USA, 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Dey, S.; Misra, I.S. A novel spectrum handoff switching decision scheme for improved performance of secondary users in cognitive radio networks. Int. J. Commun. Syst. 2023, 36, e5413. [Google Scholar] [CrossRef]
- Al-Dulaimi, A.; Al-Rubaye, S.; Cosmas, J. Adaptive congestion control for mobility in cognitive radio networks. In Proceedings of the 2011 Wireless Advanced, London, UK, 20–22 June 2011; IEEE: New York City, NY, USA, 2011; pp. 273–277. [Google Scholar] [CrossRef]
- Zhang, L.; Zeng, K.; Mohapatra, P. Opportunistic spectrum scheduling for mobile cognitive radio networks in white space. In Proceedings of the 2011 IEEE Wireless Communications and Networking Conference, Cancun, Mexico, 28–31 March 2011; IEEE: New York City, NY, USA, 2011; pp. 844–849. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Geographic Mobility (GM) | Computational Complexity | Min./Average/Max. Decision-Making Latency (ms) | Main Features | Limitations |
|---|---|---|---|---|---|
| Dijkstra [10] | NC | 0.2/8.6/20 | This approach can find the optimal path between two nodes in a graph. This approach can be used to make decisions in a variety of scenarios. This approach can be scaled to large networks. | This approach is sensitive to the accuracy of the data on the structure of the graph. | |
| AHP [11] | NC | 0.04/2.2/6 | Identifies the most cost-effective and latency-optimal routes between two points. Simplifies the route selection process for delivery services. Allows the user to specify the weights of the decision factors. | It depends on the accuracy of the specified weights by the user. It might be unreliable in networks with changing conditions, like mobility scenarios. | |
| FAHP [12] | NC | 0.02/0.47/1 | Improves the performance of spectral handoff by more efficiently selecting channels. It can be adaptable to different cognitive radio network scenarios. | It requires a large amount of data about the cognitive radio network. It is more complex than traditional spectral handoff algorithms. It depends on the accuracy of the specified weights by the user. | |
| ATDDiM [13] | NC | 0.02/0.46/1 | Enhances route planning performance by reducing computation time compared with Dijkstra. Reduced computation complexity. The improved algorithm implements a configurable set of numerical parameters. | It requires more preprocessing power than the original Dijkstra’s algorithm. | |
| MAS [14] | NC | NA | Spectrum efficiency using a chaotic channel selection algorithm. The scheme is robust to changes in the radio environment. Easy to implement. | The mobility scheme requires data on the structure of the cognitive radio network. The mobility scheme is sensitive to the accuracy of the data on the structure of the cognitive radio network. | |
| Cluster- based MAC protocol [15] | NC | NA | Energy efficiency. Robustness because of the mobile clustering scheme. Easy to implement. | The protocol does not use a mobility prediction model to estimate the future location of nodes. The protocol does not take into account the impact of mobility on network performance. | |
| CSA [21] | NC | NA | Improves the performance of cognitive radio networks in terms of transmission success rate and signal quality. The algorithm is robust to interference. | The model does not consider user mobility to estimate the probability of interference-free channels at a given time. The model does not consider interference from other users to estimate the probability of occupied channels at a given time. | |
| SHMA [23] | NC | NA | The proposed algorithm improves spectrum efficiency by selecting the best channel for each mobile user. The proposed algorithm improves QoS by considering the reception gain, interference, and other factors when selecting channels. The proposed algorithm is adaptive to mobility by considering the mobility of the user when selecting channels. | The algorithm assumes that the user’s spectral mobility is known. The algorithm does not consider the impact of spectral mobility on interference. The algorithm does not consider the impact of spectral mobility on network congestion. | |
| MOS [28] | NC | NA | The scheme is robust to interference because it considers the interference from primary users when making spectrum handoff switching decisions. The scheme is adaptive to mobility because it considers the mobility of secondary users when making spectrum handoff switching decisions. | The scheme assumes that primary users behave predictably. They are the only considered parameter for spectrum handoff without geographic mobility. |
| Criteria | RT | BE |
|---|---|---|
| BW | 0.1471 | 0.2921 |
| SINR | 0.1970 | 0.3949 |
| AP | 0.3593 | 0.1607 |
| ETA | 0.2966 | 0.1523 |
| Parameters | Value |
|---|---|
| Frequency band | 824–849 [MHz] |
| Communication system | Mobile |
| Communication technology | GSM |
| Number of channels | 124 |
| BW per channel | 200 [kHz] |
| Power Tx BS | 30 [dBm] |
| BS coverage area | 2167 [m] |
| BS height | 25 [m] |
| Mobile user Rx power | −80 [dBm] |
| Mobile user height | 1 [m] |
| Characteristics of the GM Scenario | Number of Matches over 2400 Samples | Match Rate | |
|---|---|---|---|
| Mobility Radius | CPU Occupancy | ||
| 2167 m | 25% | 1819 | 75.79% |
| 50% | 2062 | 85.91% | |
| 75% | 2128 | 88.66% | |
| 3250.5 m | 25% | 1839 | 76.62% |
| 50% | 2090 | 87.08% | |
| 75% | 2162 | 90.08% | |
| 4334 m | 25% | 1821 | 75.87% |
| 50% | 2075 | 86.45% | |
| 75% | 2190 | 91.25% | |
| Algorithm | Analyzed Channels | (s) | Confidence Interval (s) | |
|---|---|---|---|---|
| DMAGM | 2 | 1.0018 × 10−5 | 6.6341 × 10−6 | 1.3402 × 10−5 |
| 20 | 9.4471 × 10−5 | 8.6513 × 10−5 | 1.0243 × 10−4 | |
| 40 | 1.7717 × 10−4 | 1.7216 × 10−4 | 1.8217 × 10−4 | |
| 60 | 2.5918 × 10−4 | 2.5102 × 10−4 | 2.6733 × 10−4 | |
| 80 | 3.4220 × 10−4 | 3.2805 × 10−4 | 3.5634 × 10−4 | |
| 100 | 4.2337 × 10−4 | 4.0347 × 10−4 | 4.4327 × 10−4 | |
| 120 | 5.0618 × 10−4 | 4.8179 × 10−4 | 5.3058 × 10−4 | |
| 140 | 5.9363 × 10−4 | 5.8207 × 10−4 | 6.0519 × 10−4 | |
| 160 | 6.7631 × 10−4 | 6.6335 × 10−4 | 6.8927 × 10−4 | |
| 180 | 7.5883 × 10−4 | 7.3926 × 10−4 | 7.7841 × 10−4 | |
| 200 | 8.4375 × 10−4 | 8.2255 × 10−4 | 8.6496 × 10−4 | |
| FDMAGM | 2 | 9.0613 × 10−5 | 3.2976 × 10−5 | 1.4825 × 10−4 |
| 20 | 8.5449 × 10−4 | 5.1269 × 10−4 | 1.1963 × 10−3 | |
| 40 | 1.6415 × 10−3 | 1.0943 × 10−3 | 2.1886 × 10−3 | |
| 60 | 2.2854 × 10−3 | 1.9420 × 10−3 | 2.6288 × 10−3 | |
| 80 | 2.9847 × 10−3 | 2.0981 × 10−3 | 3.8714 × 10−3 | |
| 100 | 3.7482 × 10−3 | 3.3557 × 10−3 | 4.1408 × 10−3 | |
| 120 | 4.4709 × 10−3 | 3.9891 × 10−3 | 4.9526 × 10−3 | |
| 140 | 5.2138 × 10−3 | 4.3504 × 10−3 | 6.0772 × 10−3 | |
| 160 | 5.9145 × 10−3 | 4.9912 × 10−3 | 6.8378 × 10−3 | |
| 180 | 6.6679 × 10−3 | 6.4288 × 10−3 | 6.9069 × 10−3 | |
| 200 | 7.6456 × 10−3 | 6.8606 × 10−3 | 8.4306 × 10−3 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cervantes-Junco, G.B.; Rodriguez-Colina, E.; Palacios-Luengas, L.; Pascoe-Chalke, M.; Lara-Velázquez, P.; Marcelín-Jiménez, R. Decision-Making Algorithm with Geographic Mobility for Cognitive Radio. Sensors 2024, 24, 1540. https://doi.org/10.3390/s24051540
Cervantes-Junco GB, Rodriguez-Colina E, Palacios-Luengas L, Pascoe-Chalke M, Lara-Velázquez P, Marcelín-Jiménez R. Decision-Making Algorithm with Geographic Mobility for Cognitive Radio. Sensors. 2024; 24(5):1540. https://doi.org/10.3390/s24051540
Chicago/Turabian StyleCervantes-Junco, Gabriel B., Enrique Rodriguez-Colina, Leonardo Palacios-Luengas, Michael Pascoe-Chalke, Pedro Lara-Velázquez, and Ricardo Marcelín-Jiménez. 2024. "Decision-Making Algorithm with Geographic Mobility for Cognitive Radio" Sensors 24, no. 5: 1540. https://doi.org/10.3390/s24051540
APA StyleCervantes-Junco, G. B., Rodriguez-Colina, E., Palacios-Luengas, L., Pascoe-Chalke, M., Lara-Velázquez, P., & Marcelín-Jiménez, R. (2024). Decision-Making Algorithm with Geographic Mobility for Cognitive Radio. Sensors, 24(5), 1540. https://doi.org/10.3390/s24051540