


Spacecraft Attitude Measurement and Control Using VSMSCSG and Fractional-Order Zeroing Neural Network Adaptive Steering Law

Abstract
1. Introduction
2. Attitude Measurement and Control Method Using VSMSCSG Configuration
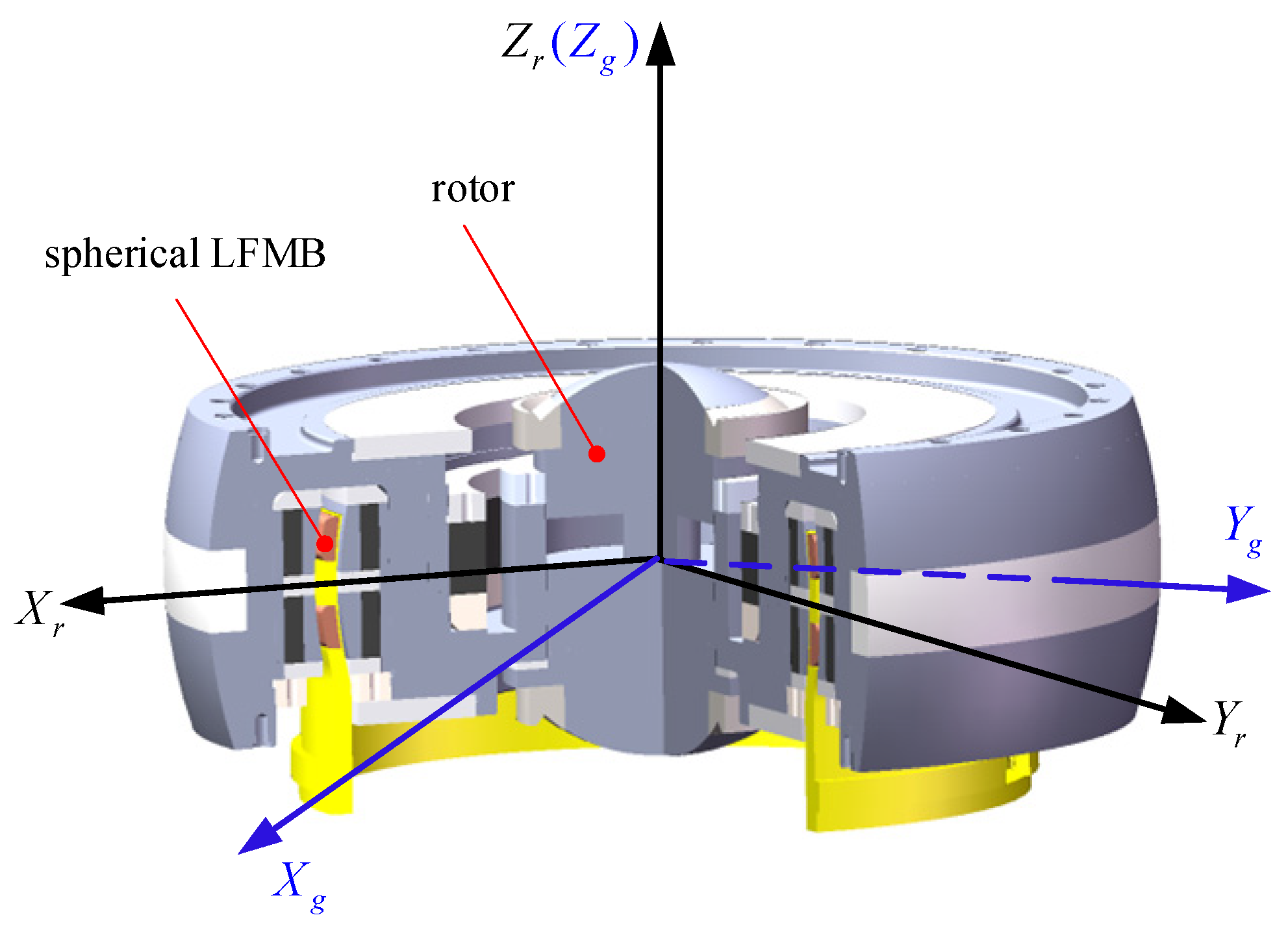
2.1. The Structure and Principle of the VSMSCSG
2.2. Attitude Measurement and Control Integration Method
3. Design of Fractional-Order Zeroing Neural Network Steering Law
3.1. Construction of Fractional-Order Zeroing Neural Network and Analysis of Its Convergence Performance
3.2. Design of VSMSCSG Adaptive Fractional-Order Zeroing Neural Network Steering Law
4. Semi-Physical Simulation and Discussion
4.1. Comparative Simulation of Zeroing Neural Network Convergence Performance
4.2. Comparison of Spacecraft Attitude Control and Measurement Accuracy and Rotor Deflection Angles Saturation
4.3. High-Bandwidth Moment Output Verification Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, Q. Neural network-based adaptive attitude tracking control for flexible spacecraft with unknown high-frequency gain. Int. J. Adapt Control Signal Process. 2010, 24, 477–489. [Google Scholar] [CrossRef]
- Cui, P.; Wang, Q.; Li, S.; Gao, Q. Combined FIR and Fractional-Order Repetitive Control for Harmonic Current Suppression of Magnetically Suspended Rotor System. IEEE Trans. Ind. Electron. 2017, 64, 4828–4835. [Google Scholar] [CrossRef]
- Yin, Z.; Cai, Y.; Ren, Y.; Wang, W. A Measurement Method of Torque Coefficient for Magnetically Suspended Control and Sensitive Gyroscope. IEEE Sens. J. 2021, 21, 14767–14775. [Google Scholar] [CrossRef]
- Xiang, B.; Liu, H.; Yu, Y. Gimbal effect of magnetically suspended flywheel with active deflection of Lorentz-force magnetic bearing. Mech. Syst. Signal Process. 2022, 173, 109081. [Google Scholar] [CrossRef]
- Li, L.; Ren, Y.; Wang, W. Spacecraft Attitude Measurement and Control Integration Using a Novel Configuration of Variable Speed Magnetically Suspended Control and Sensing Gyroscope. IEEE Sens. J. 2023, 23, 9359–9369. [Google Scholar] [CrossRef]
- Vadali, S.R.; Walker, S.R.; Oh, H.S. Preferred gimbal angles for single gimbal control moment gyros. J. Guid. Control Dyn. 1990, 13, 1090–1095. [Google Scholar] [CrossRef]
- Kurokawa, H.; Yajima, N.; Usui, S. A New Steering Law of a Single-Gimbal CMG System of Pyramid Configuration. IFAC Proc. Vol. 1985, 18, 251–257. [Google Scholar] [CrossRef]
- Bedrossian, N.S.; Paradise, J.; Bergmann, E.V.; Rowell, D. Steering law design for redundant single gimbal Control Movement Gyro systems. J. Guid. Control Dyn. 1987, 13, 1083–1089. [Google Scholar] [CrossRef]
- Yi, T.; Geng, Y.; Wu, B. Singularity Radius Gradient-Based Rapid Singularity-Escape Steering Law for SGCMGs. Chin. J. Aeronaut. 2020, 33, 2728–2742. [Google Scholar] [CrossRef]
- Ford, K.A.; Hall, C.D. Singular direction avoidance steering for control-moment gyros. J. Guid. Control Dyn. 2000, 23, 648–656. [Google Scholar] [CrossRef]
- Xia, C.F.; Cai, Y.W.; Ren, Y.; Fan, Y.H.; Xin, C.J.; Yin, Z.Y. Extended dual-frequency Bode Diagram Stability Analysis Method for MSCSG rotor Systems. J. Astronaut. 2018, 39, 168–176. [Google Scholar]
- Liu, F.; Zhao, H.; Yao, Y.; Guo, Y.; Wang, L. The parameters optimisation design for variable speed control momentum gyroscopes. Int. J. Control 2016, 90, 2618–2630. [Google Scholar] [CrossRef]
- Xia, C.; Cai, Y.; Ren, Y. Steering law design for a magnetically suspended control and sensitive gyro cluster considering rotor tilt saturation. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 4066–4076. [Google Scholar] [CrossRef]
- Leeghim, H.; Lee, C.Y.; Jin, J.; Kim, D. A Singularity-free Steering Law of Roof Array of Control Moment Gyros for Agile Spacecraft Maneuver. Int. J. Control Autom. Syst. 2020, 18, 1679–1690. [Google Scholar] [CrossRef]
- Zhang, R.; Yu, Y.; Han, C.; Yang, Z. An anti-saturation steering law for Three Dimensional Magnetically Suspended Wheel cluster with angle constraint. Acta Astronaut. 2018, 151, 467–474. [Google Scholar] [CrossRef]
- Wu, Z.; Chou, W.; Wei, K. Steering Law Design for Single Gimbal Control Moment Gyroscopes Based on RBF Neural Networks. In Proceedings of the PRICAI 2006: Trends in Artificial Intelligence, 9th Pacific Rim International Conference on Artificial Intelligence, Guilin, China, 7–11 August 2006. [Google Scholar]
- Wei, K.M.; Wu, Z.; Gao, X.Y. Steering Law Design for Control Moment Gyros Using Recurrent Neural Network. J. Astronaut. 2008, 29, 4. [Google Scholar]
- Ren, Y.; Chen, X.; Cai, Y.; Liu, Q. Attitude-Rate Measurement and Control Integration Using Magnetically Suspended Control & Sensitive Gyroscopes. IEEE Trans. Ind. Electron. 2018, 65, 4921–4932. [Google Scholar]
- Zuo, Q.; Xiao, L.; Li, K. Comprehensive design and analysis of time-varying delayed zeroing neural network and its application to matrix inversion. Neurocomputing 2020, 379, 273–283. [Google Scholar] [CrossRef]
- Jia, L.; Xiao, L.; Dai, J.; Cao, Y.A. Novel Fuzzy-Power Zeroing Neural Network Model for Time-Variant Matrix Moore–Penrose Inversion with Guaranteed Performance. IEEE Trans. Fuzzy Syst. 2020, 29, 2603–2611. [Google Scholar] [CrossRef]
- Hu, Z.; Xiao, L.; Li, K.; Li, K.; Li, J. Performance analysis of nonlinear activated zeroing neural networks for time-varying matrix pseudoinversion with application. Appl. Soft Comput. 2021, 98, 106735. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, Z.; Li, S. Solving Time-Varying System of Nonlinear Equations by Finite-Time Recurrent Neural Networks with Application to Motion Tracking of Robot Manipulators. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 2210–2220. [Google Scholar] [CrossRef]
- Stanimirović, P.S.; Katsikis, V.N.; Li, S. Integration enhanced and noise tolerant ZNN for computing various expressions involving outer inverses. Neurocomputing 2019, 329, 129–143. [Google Scholar] [CrossRef]
- Si, Y.; Wang, D.; Chou, Y.; Fu, D. Nonconvex activated zeroing neural network model for solving time-varying nonlinear minimization problems with finite-time convergence. Knowl.-Based Syst. 2023, 274, 110633. [Google Scholar] [CrossRef]
- Li, J.; Yao, R.; Feng, Y.; Wang, S.; Zhu, X. Zeroing Neural Network for Solving Hybrid Multilayered Time-Varying Linear System. IEEE Access 2020, 8, 199406–199414. [Google Scholar] [CrossRef]
- Yin, C.; Chen, W.F. Design of sliding mode controller for a class of fractional-order chaotic systems. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 356–366. [Google Scholar] [CrossRef]
- Liu, H.; Li, S.; Cao, J.; Li, G.; Alsaedi, A.; Alsaadi, F.E. Adaptive fuzzy prescribed performance controller design for a class of uncertain fractional-order nonlinear systems with external disturbances. Neurocomputing 2017, 219, 422–430. [Google Scholar] [CrossRef]
- Zhang, H.M.; Yin, H.C. Zeroing neural network model for solving a generalized linear time-varying matrix equation. AIMS Math. 2022, 7, 2266–2280. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| ) | 0.0097 | (r/min) | 5000 |
| ) | 0.0097 | ) | 140 |
| ) | 0.0166 | ) | 8.95 |
| ) | 4200 | 0.7 | |
| ) | 5800 | 1 | |
| ) | 0.2 | 5 | |
| v | 1.5 | r | 0.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Ren, Y.; Wang, W.; Pang, W. Spacecraft Attitude Measurement and Control Using VSMSCSG and Fractional-Order Zeroing Neural Network Adaptive Steering Law. Sensors 2024, 24, 766. https://doi.org/10.3390/s24030766
Li L, Ren Y, Wang W, Pang W. Spacecraft Attitude Measurement and Control Using VSMSCSG and Fractional-Order Zeroing Neural Network Adaptive Steering Law. Sensors. 2024; 24(3):766. https://doi.org/10.3390/s24030766
Chicago/Turabian StyleLi, Lei, Yuan Ren, Weijie Wang, and Weikun Pang. 2024. "Spacecraft Attitude Measurement and Control Using VSMSCSG and Fractional-Order Zeroing Neural Network Adaptive Steering Law" Sensors 24, no. 3: 766. https://doi.org/10.3390/s24030766
APA StyleLi, L., Ren, Y., Wang, W., & Pang, W. (2024). Spacecraft Attitude Measurement and Control Using VSMSCSG and Fractional-Order Zeroing Neural Network Adaptive Steering Law. Sensors, 24(3), 766. https://doi.org/10.3390/s24030766