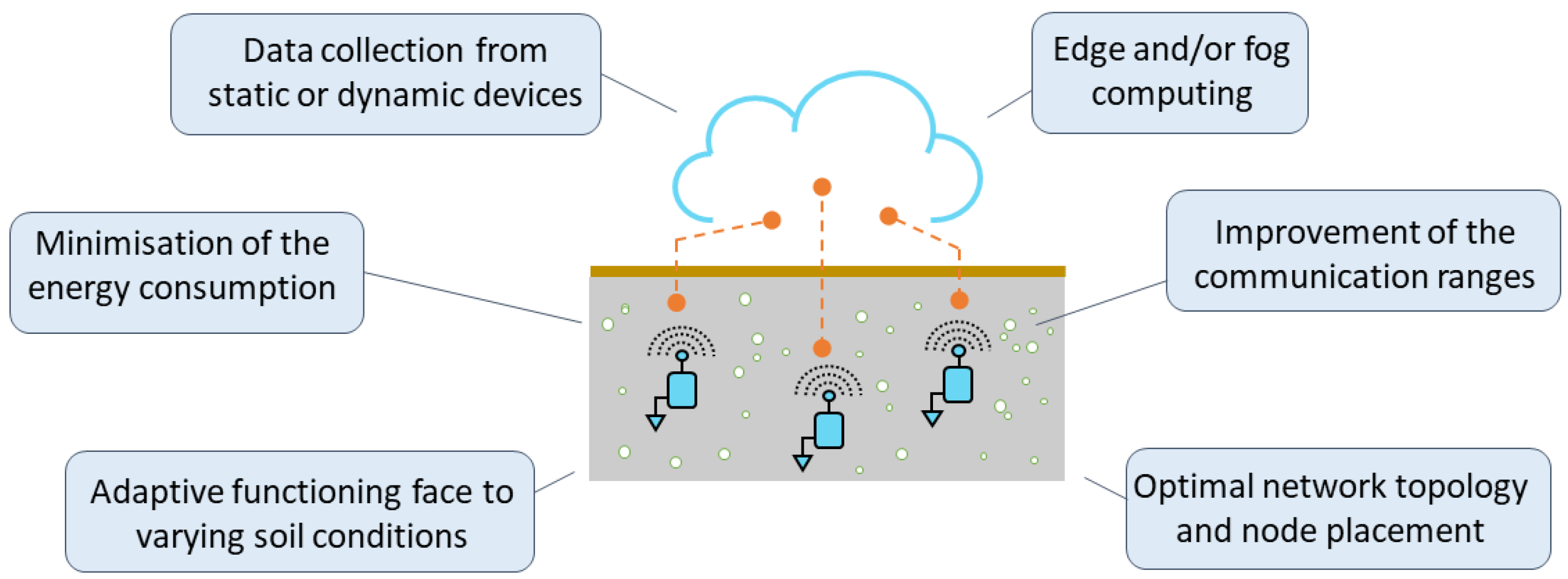
The development of wireless underground sensor networks (WUSNs) may appear to be very similar to their equivalent aboveground systems, the Wireless Sensor Networks (WSNs). However, the communication medium differs significantly, which requires deeply rethinking the existing architectures. In fact, the propagation of the electromagnetic waves is much more attenuated in the soil than in the air, about 20 to 300 times worse, see [
17], which is a severe constraint for the underground communications. Moreover, the variations of the parameters of the soil medium, especially the volumetric water content (VWC), and the limited energy capacity of the buried sensor nodes with no possibility of recharge underground, are additional major and specific constraints. As a result, the network architectures developed for WSNs are not directly applicable to WUSNs. The current challenges related to the development of buried sensor nodes are highlighted in
Figure 3 and discussed in the following subsections.
3.1. Adaptive Functioning Face to Varying Soil Conditions
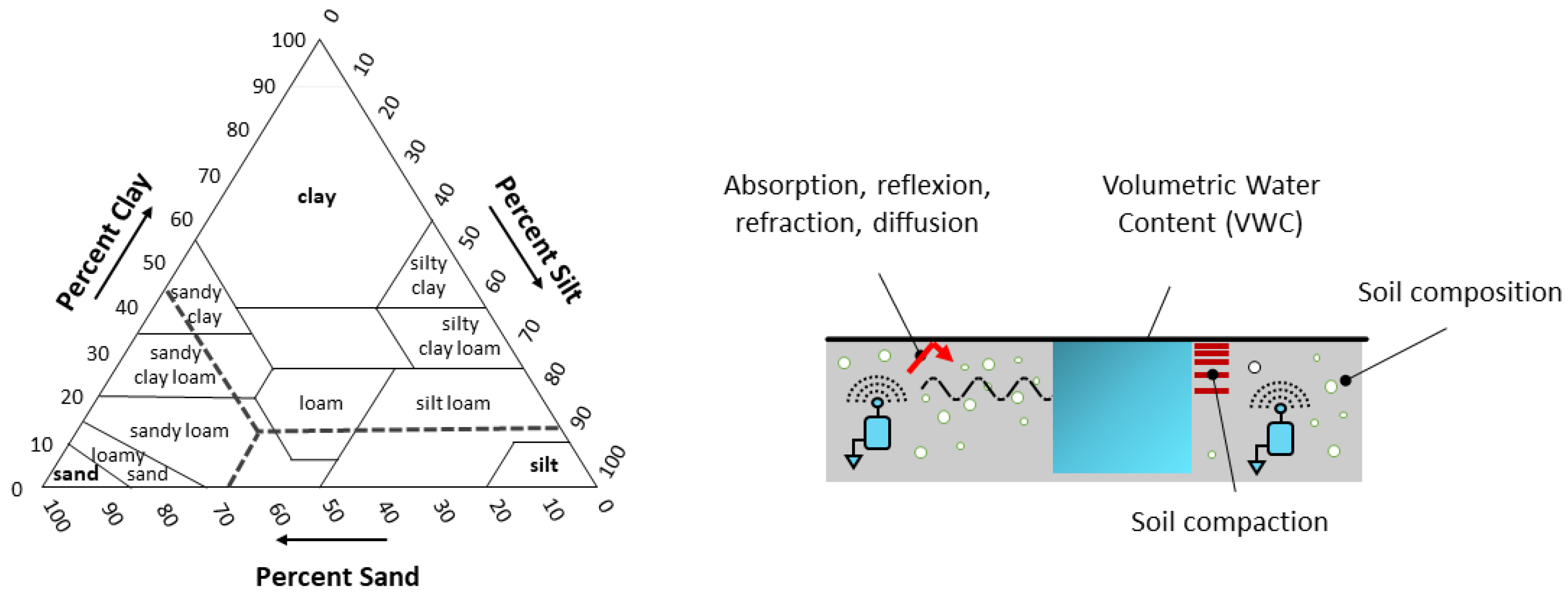
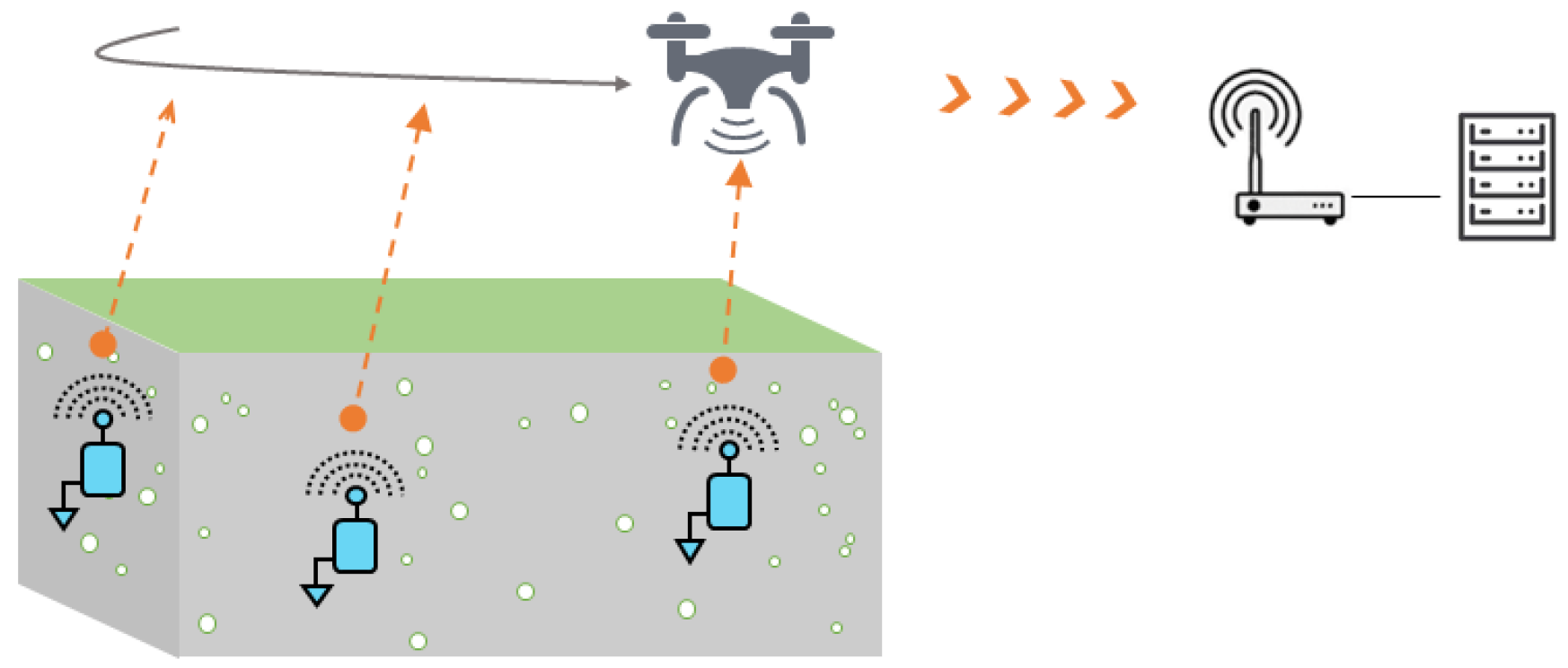
As illustrated in
Figure 1, the nodes of a WUSN are fully buried underground at a depth dependent on the application. When looking at a soil structure, it is composed of three main components, namely clay, silt and sand, each having different grain sizes (respectively, less than 0.002 mm, 0.002 to 0.05 mm, 0.05 to 2 mm); see the soil classification defined by the United States Department of Agriculture (USDA) in
Figure 4 (left). The distribution of these three components determines not only the permeability of the soil to water and air but also its capacity of water retention (e.g., silt and clay soils have higher water-holding capacities than sandy soil). This water retention plays an important role in the communication ranges of the nodes as, in addition to being highly attenuated underground, the propagation of the electromagnetic waves is highly impacted by the soil moisture [
21,
22,
23,
24,
61]; the more the volumetric water content (VWC) of a soil is high (i.e., the ratio of the volume of water to the volume of soil), the more the propagation of the electromagnetic waves is attenuated; see [
25,
26]. The issue is that the VWC of a soil varies spatially and over time, with respect to numerous factors (e.g., soil composition, ground topology, weather conditions, vegetation, human activities). That makes it difficult to estimate and predict the communication range of a buried sensor node at a specific time and a specific location. Moreover, as depicted in
Figure 4 (right), many others factors impact the propagation of the signals in the soil medium. In particular, the absorption, reflection, refraction and diffusion phenomena lead to important signal losses. The intensity of these phenomena depends on the soil properties but also the burial depth of the sensor nodes. The compaction of the soil (bulk density) has also an important impact; the more a soil is compacted, the more the electromagnetic waves are attenuated, see [
18,
27,
28,
47].
Numerous works have focused on characterizing and modeling the propagation of the electromagnetic (EM) waves through the soil with respect to all these environmental factors impacting the signal propagation; see [
29,
30,
31,
32,
33,
37,
51]. In particular, the Friis and Fresnel models have been proposed to model the signal path loss in soil. They are based on the knowledge of the complex dielectric permittivity of the soil. For example, considering a transmitter node and a receiver node, both buried underground, the Friis model enables us to calculate the received power
with respect to the transmitted power
, the transmitter and receiver gains
and
and the total path loss underground
; see Equation (
1). In this equation, the total path loss underground
is defined with respect to the distance between the transmitter and the receiver
, a signal attenuation coefficient
and a phase shifting coefficient
; see Equation (
2). The coefficients
and
are calculated from the frequency of the signal
, the magnetic permeability of the soil
, and the real and imaginary parts of the dielectric permittivity (respectively
and
); see Equation (
3).
Several variants of this model have been proposed in the literature, in particular to take into account the burial depth of the sensor nodes and the reflection of the EM waves at the air-ground interface; see [
38]. The underground-to-aboveground communications (UG2AG) and vice versa (AG2UG) necessitate also complementary models; see [
39]. For example, the total pass loss of the UG2AG channel can be decomposed in three parts, namely the path loss underground
, the loss due to the refraction phenomena at the soil-to-air interface
and the path loss aboveground
; see Equation (
4).
can be derived from Equation (
1),
and
from Equation (
5); see [
38] for more details.
Similarly, the total pass loss of the AG2UG channel can be decomposed in three parts, namely the path loss aboveground
, the loss due to the refraction phenomena at the air to soil interface
, and the path loss underground
; see Equation (
6).
and
can be derived from respectively Equations (
1) and (
5),
from Equation (
7); see [
38] (
is the incident angle of the EM signal).
An important work consists of comparing the results obtained with these models obtained in a theoretical or empirical manner with experimental measurements.
Table 3 presents a few examples of these works. The issue is that the soil is a very complex and dynamic medium, and the estimation of signal attenuation is difficult to measure accurately due to numerous influencing factors. Moreover, to improve the accuracy of the models, the measurement of the complex dielectric permittivity of the soil at the location of the sensor nodes, e.g., based on time domain reflectometry (TDR) [
33], is particularly important.
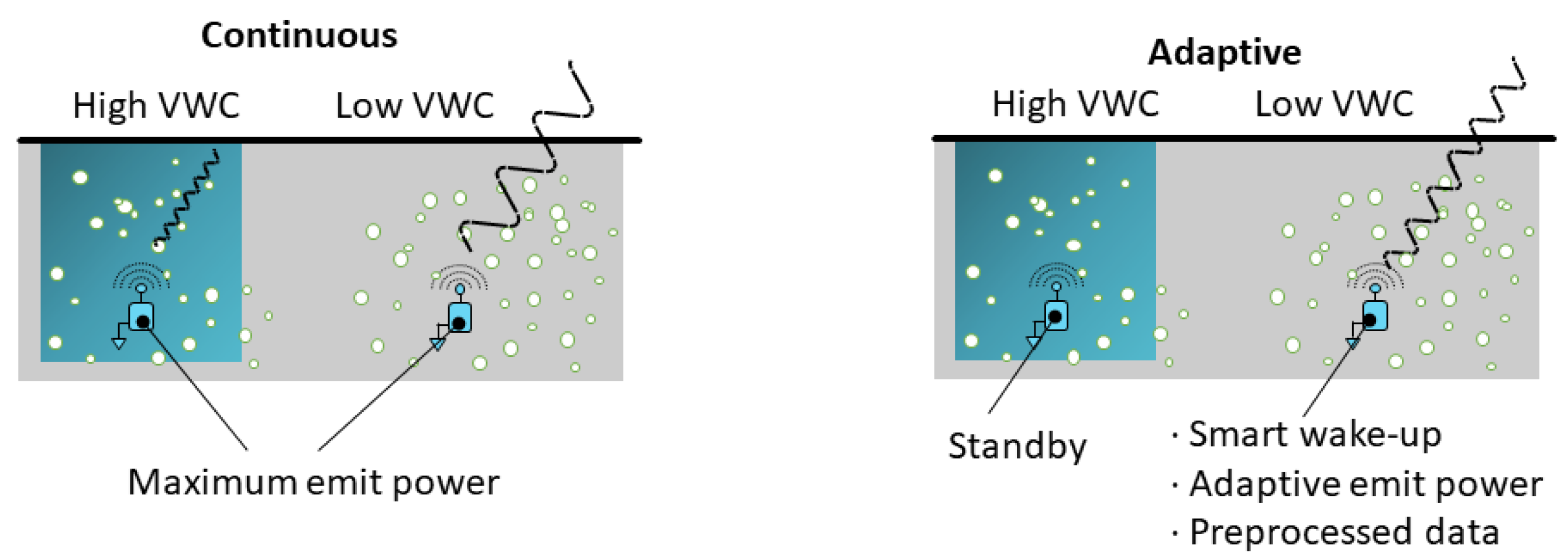
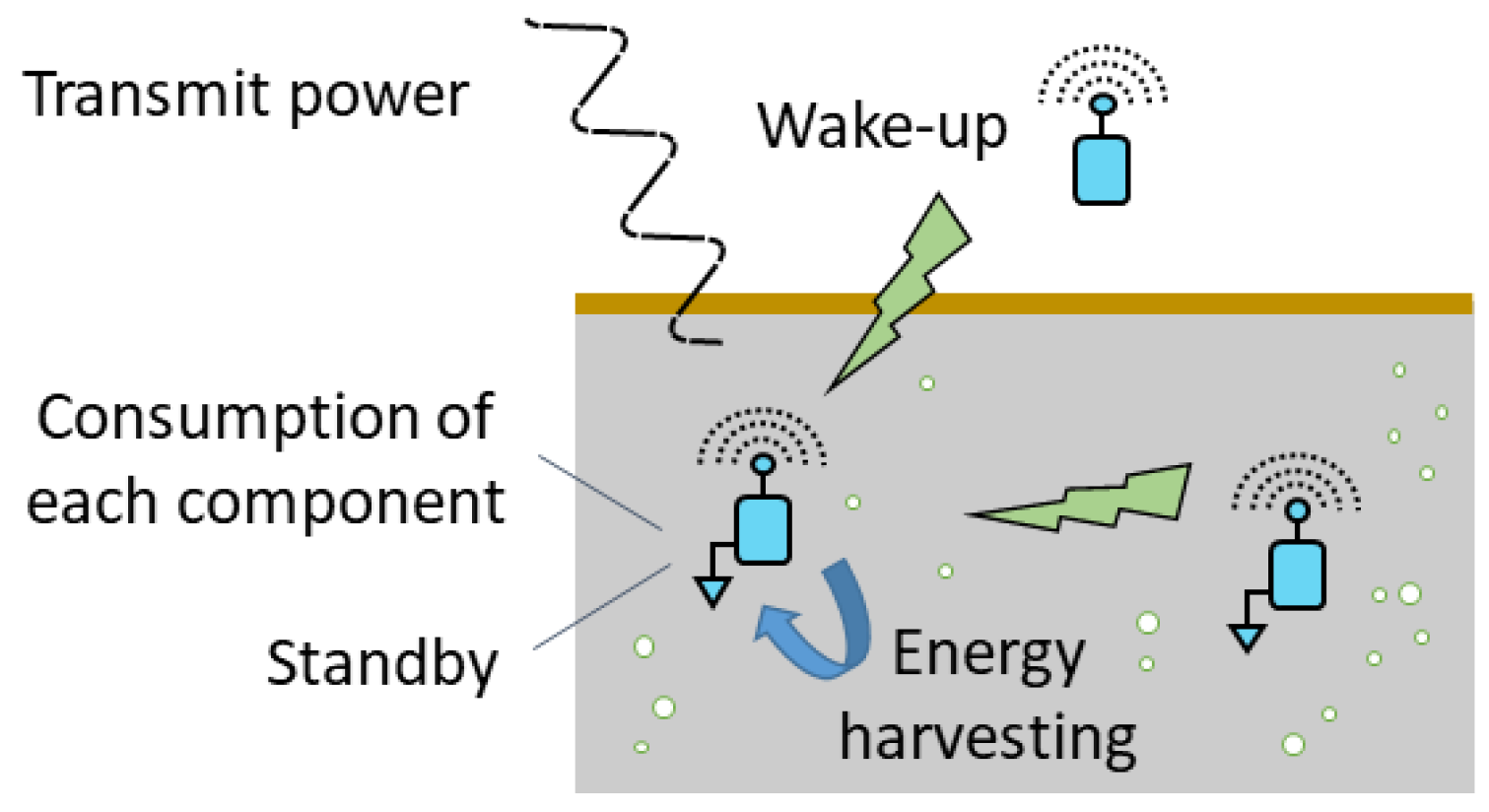
In addition, one of the main challenges in the development of reliable WUSNs is to take into account the limited and non-constant communication ranges of the buried sensor nodes, and adapt their functioning accordingly. Currently, the WUSNs proposed in the literature are mainly based on buried sensor nodes operating continuously, eventually combined with wake-up time windows and duty cycles; see
Figure 5 (left). The emit power is usually tuned to the maximum value (+14 dBm/ 25 mW), and the buried sensor nodes are placed close to one other to maximize the connectivity to the detriment of the energy consumption and the number of nodes to be deployed. However, the future challenge will be to adapt the functioning of the buried sensor nodes to the soil conditions to minimize the energy consumption; see
Figure 5 (right). In particular, when the VWC becomes too high, the node could limit its data transmissions to the minimum until to be set in standby mode. When the VWC decreases, the node could wake-up and transmit a limited number of preprocessed data with the minimal emit power to communicate with an aboveground node. Obviously, such operating modes should be determined together with the choice of the network topology and the placement of the nodes requested by the application [
40,
41].
3.2. Determination of the Network Topology and Node Placement
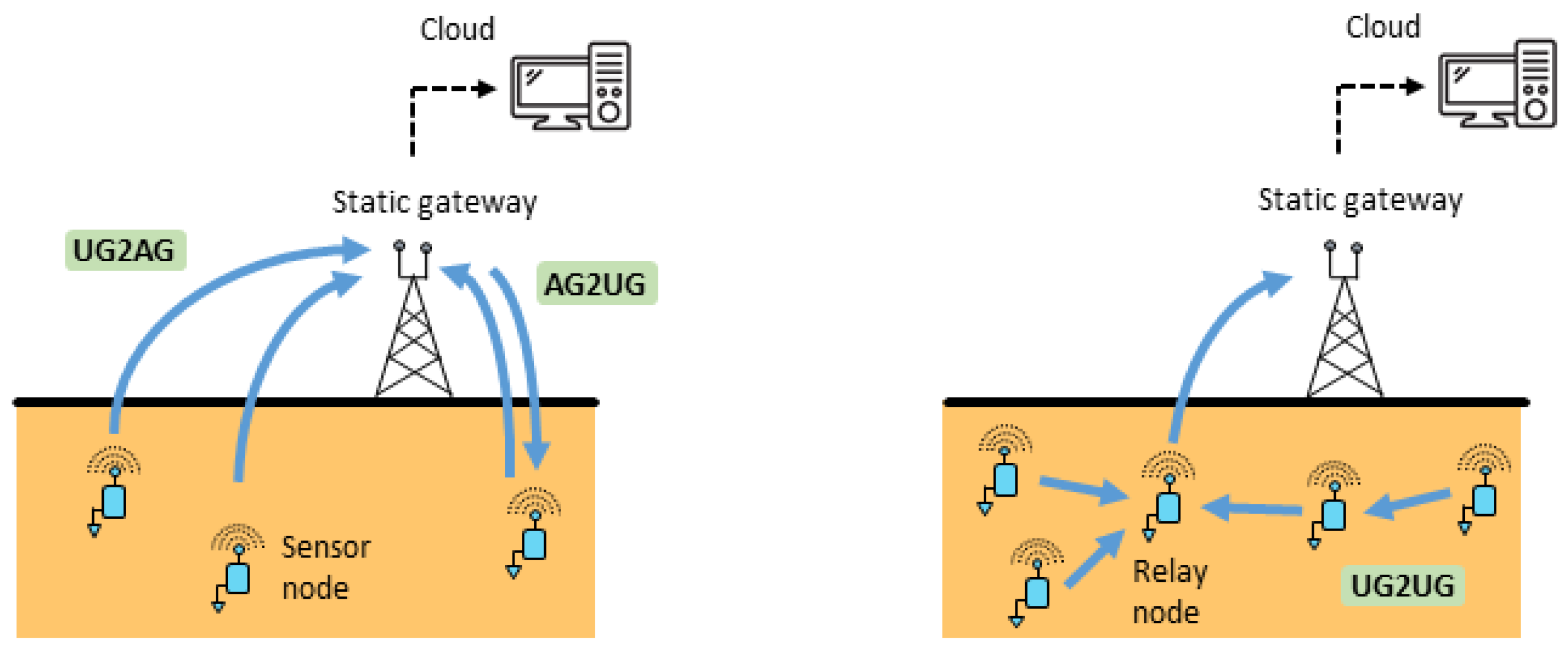
Three types of communication link can be present in WUSNs, namely underground to aboveground (UG2AG: the transmitting node is underground and the receiving node is aboveground), aboveground to underground (AG2UG: the transmitting node is aboveground and the receiving node is underground) and underground to underground (UG2UG: the transmitting and receiving nodes are both underground). The signals, however, do not propagate in the same manner according to the type of communication link [
52]. On the one hand, the UG2UG communications between two buried sensor nodes are still difficult to obtain today for more than a few meters as the signal is completely propagated through the soil medium [
34]. The WUSNs based on UG2UG links require, therefore, a high number of buried nodes to route the data, which can be relatively expensive and non-efficient. On the other hand, UG2AG and AG2UG communication links can reach longer distances (e.g., several hundreds of meters in certain conditions [
12,
62]), but they are not symmetrical: the UG2AG communications are usually of better quality than the AG2UG communications, see [
72]. Based on these first findings, two main network topologies have been proposed in the literature [
18,
25], as depicted in
Figure 6.
The simplest topology is based on independent buried sensor nodes; see
Figure 6 (left). Each node communicates with an aboveground node (gateway) positioned at proximity by using UG2AG communications to transfer the data. AG2UG communications can also be implemented, for example, to update some parameters. This topology enables a rapid deployment of a star-shaped network with relatively reliable communications [
25]. In counterpart, many gateways have to be installed aboveground, depending on the communication range of the buried sensor nodes and their distribution in the field. A second topology integrates one or several underground relay nodes; see
Figure 6 (right). These nodes collect first the measurements of all the buried nodes in their network through UG2UG communications and multi-hop operations [
42,
48]. The data are next transmitted to the aboveground node (gateway) through UG2AG communications. This approach is more complex to develop as it requires the integration of routing protocols and different strategies (e.g., the role of a relay node can be given to another one to distribute the energy costs), [
35,
43,
44]. This topology is also confronted by the difficulty to obtain reliable UG2UG communications and by the risk that the failure of one node can make all the network inoperative [
45,
77]. Future challenges on the network topology underground are thus mainly based on the improvement of the performances and reliability of the UG2UG communication links.
The development of a WUSN has also to consider the optimal number and location of nodes with respect to the agricultural needs and ground topology. That objective raises some problems of node distribution and data collection, all the more in large-scale farming and isolated environments [
78]. The burial depth of the nodes can also be important in agriculture (e.g., more than 60 cm in the case of tillage operations). The minimization of the energy consumption of the buried sensor nodes is therefore essential to avoid costly and tedious maintenance operations.
3.3. Minimisation of the Energy Consumption of the Buried Sensor Nodes
The buried sensor nodes can not be easily accessible, all the more when they are deeply buried below the surface. Moreover, contrarily to the WSNs, it is difficult to access energy recharge systems (e.g., solar panels). To make the deployment of a WUSN profitable, the minimization of the energy consumption of the buried sensor nodes is therefore a major challenge [
46,
49,
79]. This one can be addressed in several ways, as highlighted in
Figure 7.
First of all, the selection of each electronic device composing the node has to be determined carefully with respect to its energy consumption, and especially the radio transceiver which is the most energy consuming component, e.g., a node can consume only a few micro-amperes in deep-sleep mode and several tens of milli-amperes during a data transmission; see [
80]. As seen previously in
Section 2, the operating parameters can also be optimized to minimize both the activation phases (i.e., duty cycles) and the duration of the transmissions. These activation phases can be triggered by previously defining time windows but also by using a wake-up signal received from another node, located aboveground or underground. For example, Ref. [
81] investigated the possibility to wake-up a sensor node located aboveground from an UAV by using either infrared or radio frequency signals. The development of wake-up systems for underground nodes is a real challenge which could open numerous perspectives for the development of WUSNs; see [
50]. The development of energy harvesting solutions is another way to prolong the lifetime of the nodes. The principle consists of retrieving some energy from natural sources (e.g., sun, water, wind, heat [
82,
83,
84,
85]), radio-frequencies [
86] or vibrations [
87]. The aboveground nodes (gateways) can advantageously improve their autonomy with such an approach. The extension to the underground context is an interesting perspective to improve the efficiency of WUSNs in agriculture; see [
47].
3.4. Improvement of the Communication Ranges
To obtain a reliable WUSN, it is essential to have nodes with high communication range capabilities, whether it be to communicate with each other or reach the aboveground nodes (gateways). The acoustic waves, magnetic induction (MI) and electromagnetic waves (EM) are the main technologies which have been investigated to communicate through the soil; see [
19]. The acoustic waves can reach distances of a few tens of meters underground [
36], but the very low data rate, high noise levels and delays limit their uses in WUSNs [
30,
75]. The technologies based on magnetic induction (MI) are limited in terms of communication distance of about a few meters [
55,
56,
57,
58,
59]. Ref. [
60] proposed to install some relays composed of small transmitter and receiver coils to ensure the magnetic waves continuity, but the accurate orientation of the coils is difficult to carry out in practice. The electromagnetic waves remain, therefore, the main communication technology used in WUSNs today. This technology enables us to communicate with higher data rates in comparison with acoustic and MI solutions and is easier to deploy in practice. However, the soil moisture and burial depth highly attenuate the propagation of EM. That leads to preferably limit the depth of the node to a few tens of centimeters. The UG2UG is also limited to a few meters. The low-power wide area networks (LPWAN) are generally used as they enable a low energy consumption of the buried sensor nodes with a good signal penetration; see [
63,
88]. For example, Ref. [
12] succeeded in reaching a UG2AG communication link of a few hundred meters with sensor nodes buried between 15 to 30 cm deep using the technology LoRa [
89].
The difficulty concerns, however, the selection of the operating frequency together with the antenna design. In fact, on the one hand, the phenomena of wave absorption by water is more important when the frequencies are high. It would be thus preferable to work with low-frequency ranges to improve the communication ranges. However, by decreasing the frequencies, the size of the antennas increases, which poses some problems of installation underground. On the other hand, the antennas designed to operate aboveground have their performance degraded underground. In addition, the operating frequency is more or less shifted with respect to the soil moisture [
53]; the higher the operating frequency is, the more the shift downwards is important. For example, [
54] observed that if the VWC increases from 5% to 40%, the operating frequency is shifted from 357 MHz to 146 MHz. The issue is that the soil moisture is not constant over time, varying with the weather conditions. Therefore, even if an antenna is specifically adapted for a type of soil and a given burial depth, the antenna will always have variations with respect to the VWC.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












